
เมื่อมองผ่านช่างแกะสลักเลเซอร์ใน aliexpress อาจารย์ได้พบกับรุ่นที่ขับเคลื่อนด้วย USB หลายรุ่น มันน่าแปลกใจที่พวกเขาสามารถแกะสลักบนวัสดุต่าง ๆ รวมถึงตัดรูปร่างและรูปแบบจากสติกเกอร์และกระดาษและใช้พลังงานทั้งหมดนี้จาก 5V USB แต่ข้อเสียเปรียบของช่างแกะสลักเหล่านี้คือพวกเขามีพื้นที่ทำงานขนาดเล็กโดยส่วนใหญ่แล้วเพียง 40 มม. x 40 มม.
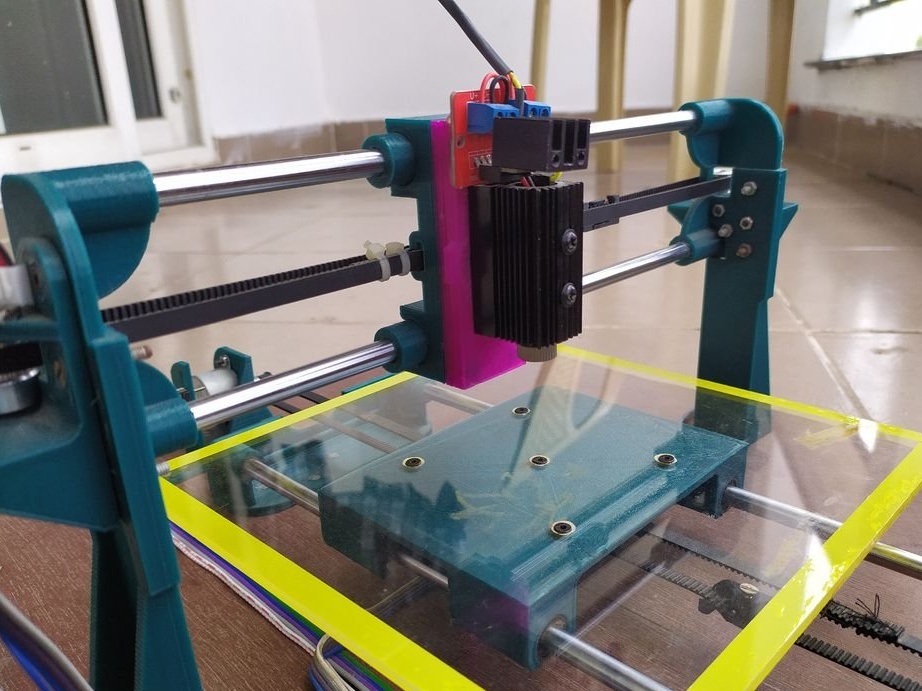
จากนั้นอาจารย์ตัดสินใจออกแบบและผลิตช่างแกะสลักโดยใช้เครื่องพิมพ์ 3 มิติสำหรับการผลิต ระหว่างทางเขาตัดสินใจที่จะทำให้ตัวยึดเลเซอร์เป็นโมดูลเพื่อให้สามารถเปลี่ยนเลเซอร์ได้อย่างง่ายดายด้วยปากกาหรือปากกามาร์คเกอร์ มีการเพิ่มฟังก์ชั่นการเชื่อมต่อบลูทู ธ
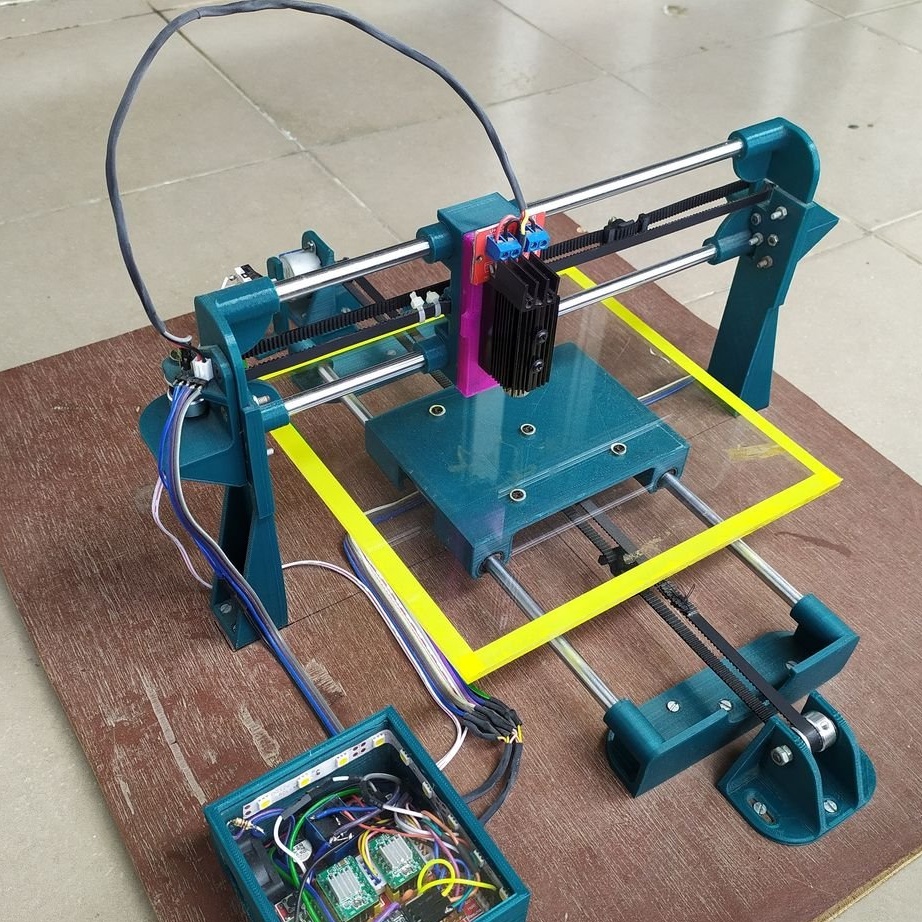
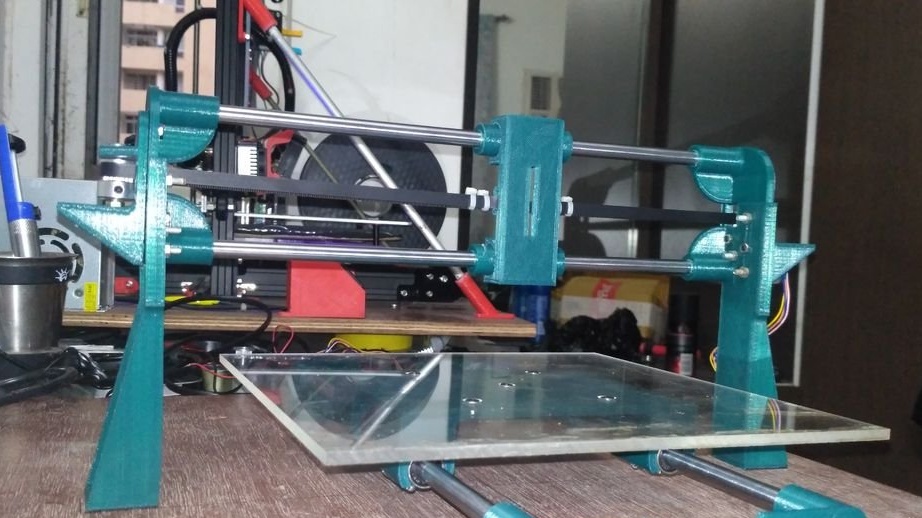
ข้อกำหนดทางเทคนิคของช่างแกะสลักมีดังนี้:
- พื้นที่ทำงาน 200 x 162 มม
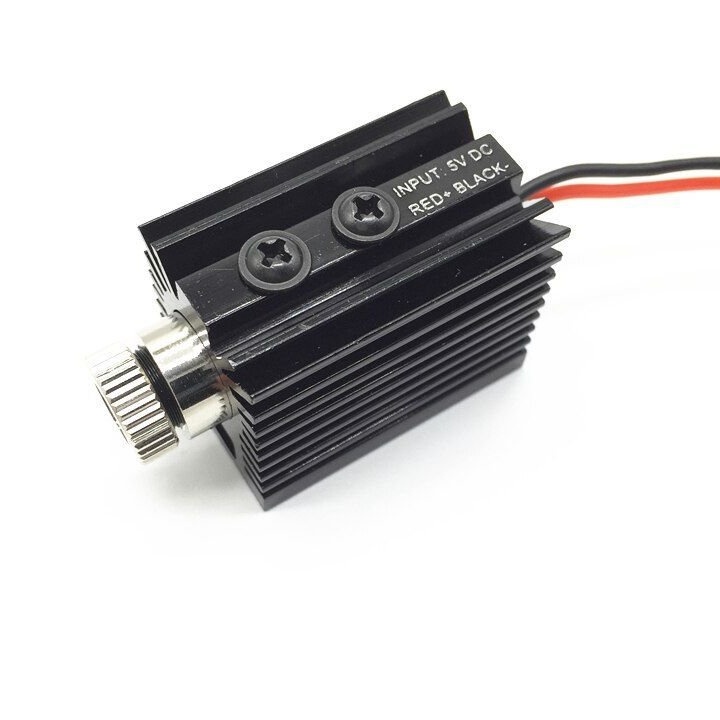
โมดูลเลเซอร์ขนาด -1000 มิลลิวัตต์
- งานจากแหล่งจ่ายไฟ USB (5V)
ฟังก์ชั่นแนะนำอัตโนมัติ
- การสื่อสาร Bluetooth ระหว่างช่างแกะสลักเลเซอร์และพีซี
- การควบคุมเลเซอร์ PWM (ช่วยในการสร้างเฉดสีดำที่แตกต่างกันเมื่อแกะสลักภาพบุคคล)
ความละเอียด -102.4 ขั้นตอนต่อมม
- เครื่องสามารถแกะสลักตัดและวาดบนวัสดุต่าง ๆ

เครื่องมือและวัสดุ:
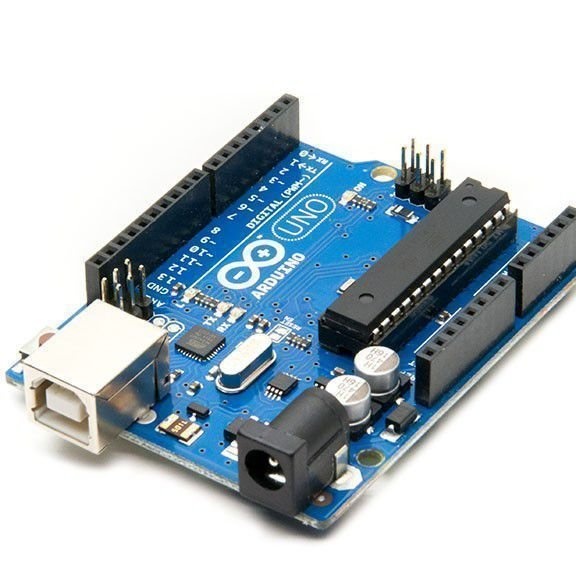
-Arduino UNO;
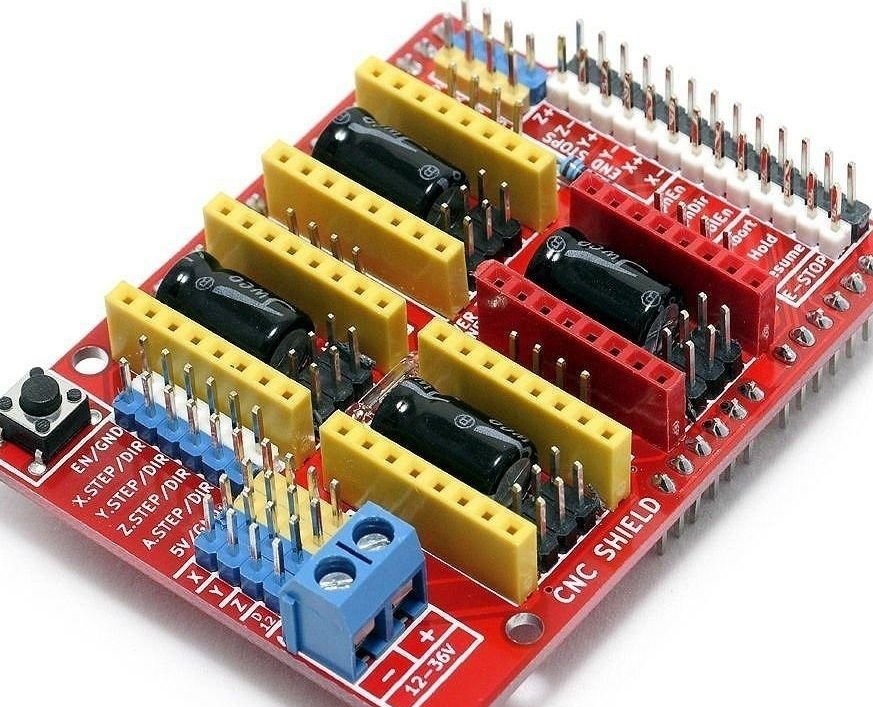
- คณะกรรมการการขยายตัว;
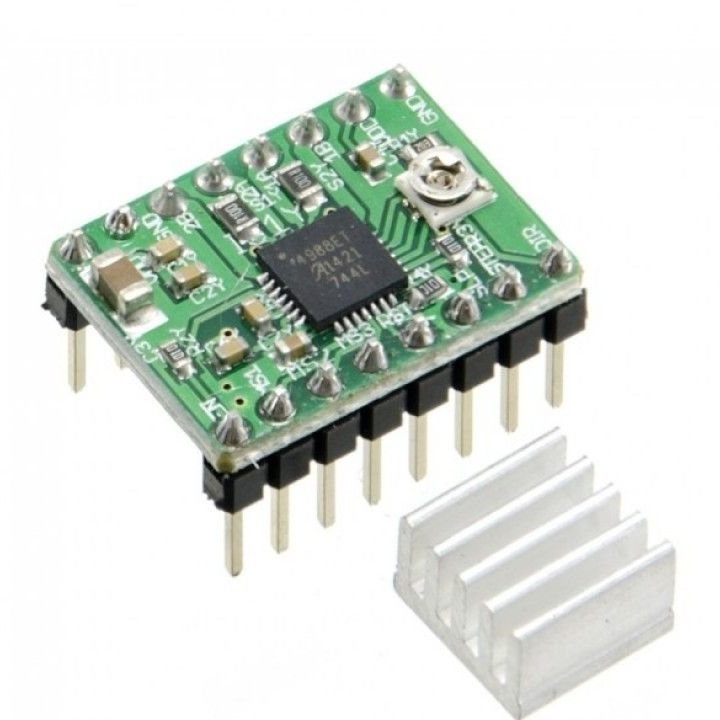
- ไดรเวอร์มอเตอร์ A4988 - 2 ชิ้น;
โมดูลเลเซอร์ -1000 mW;
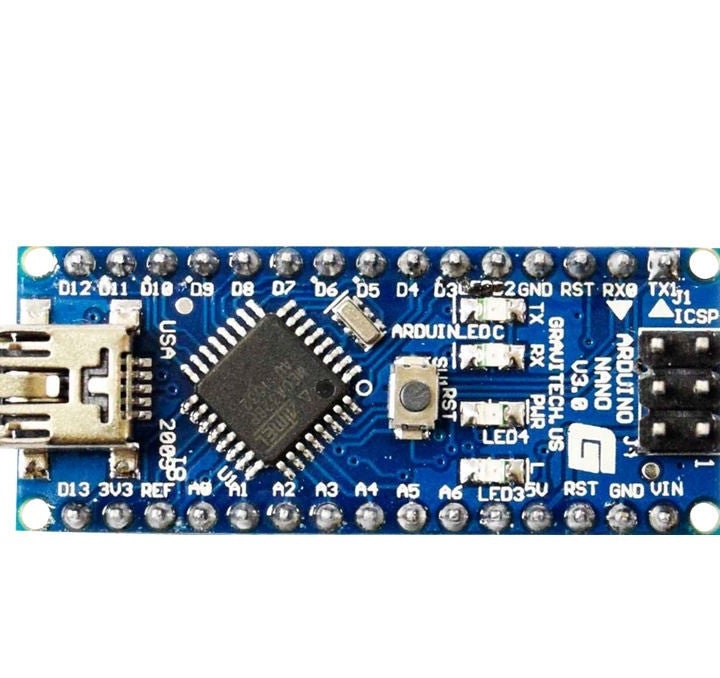
- Arduino Nano;
- XL6009 Boost Converter;
- ตลับลูกปืนเม็ดกลม LM8UU - 6 ชิ้น;
รอก - 4 ชิ้น
- แท่งขนาดเส้นผ่าศูนย์กลาง 8 มม. ความยาว 300 มม. -4 ชิ้น
- โมดูล IRF520 Mosfet;
- รีเลย์;
- ลิมิตสวิตช์ - 2 ชิ้น;
- เครื่องยนต์ขั้นตอน 2 ชิ้น;
- แม่เหล็กนีโอดิเมียม 18 x 5 มม. x 3 มม.
พัดลมระบายความร้อน -30 * 30 มม. 5 โวลต์;
-Remen;
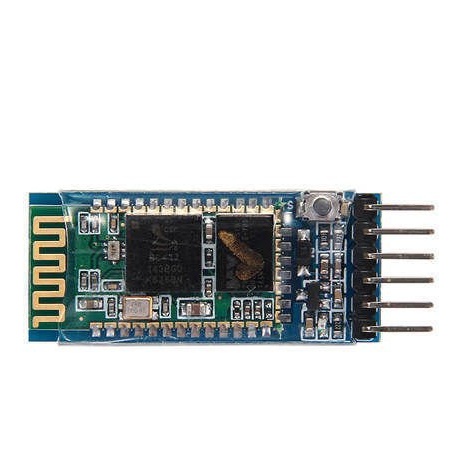
-HC-05 โมดูลบลูทู ธ ;
-SG90 servomotor;
ขั้วเกลียว
- ท่อหด
- Superglue;
- สายสัมพันธ์
-Krepezh
M3 30 มม
สลักเกลียว M3 12mm
M4 40 มม
ถั่ว M3
ถั่ว M4;
- ไม้อัด 8 มม. 48 x 42 ซม.
-5 มม. แผ่นอะครีลิคใส 22 x 22 ซม.
- สาย MicroUSB
- ขยะกระดาษ
-Nadfil;
- ไขควง
- อุปกรณ์เสริมสำหรับทิ้ง;
- คีม
- กรรไกร
-Kusachki;
- คอมพิวเตอร์พร้อมซอฟต์แวร์











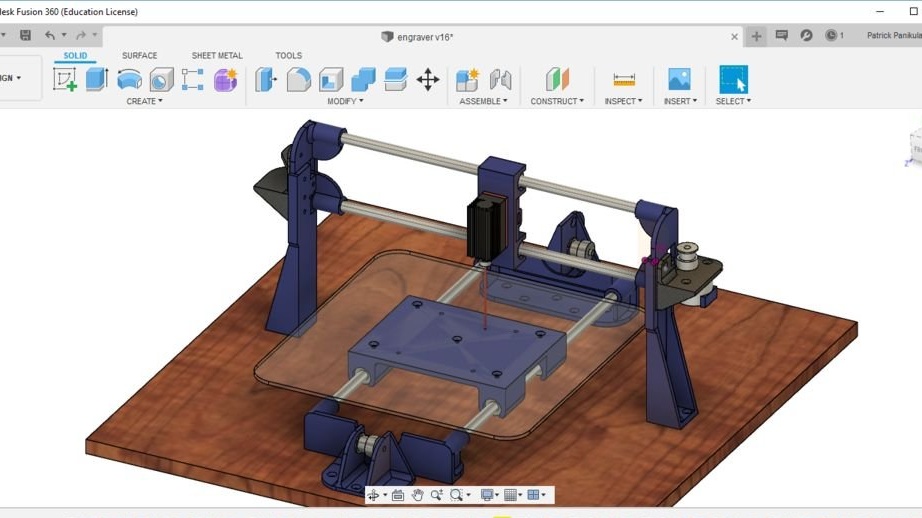
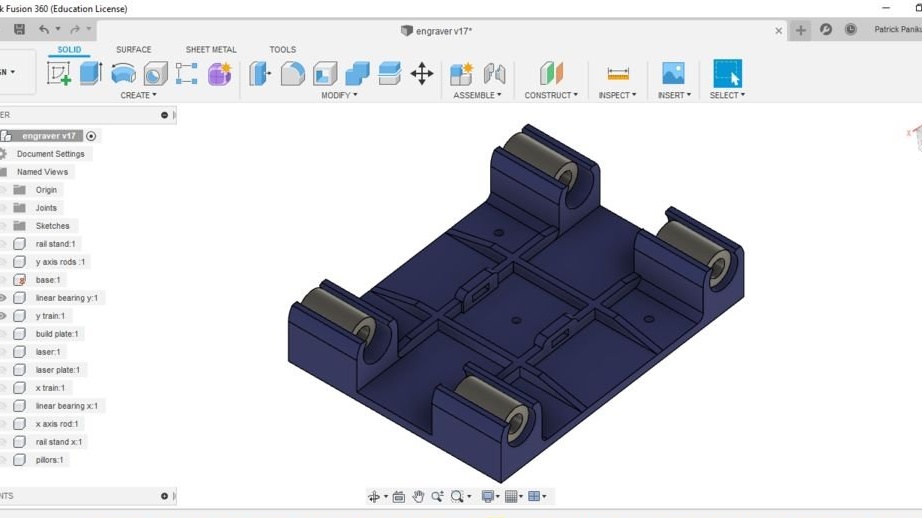
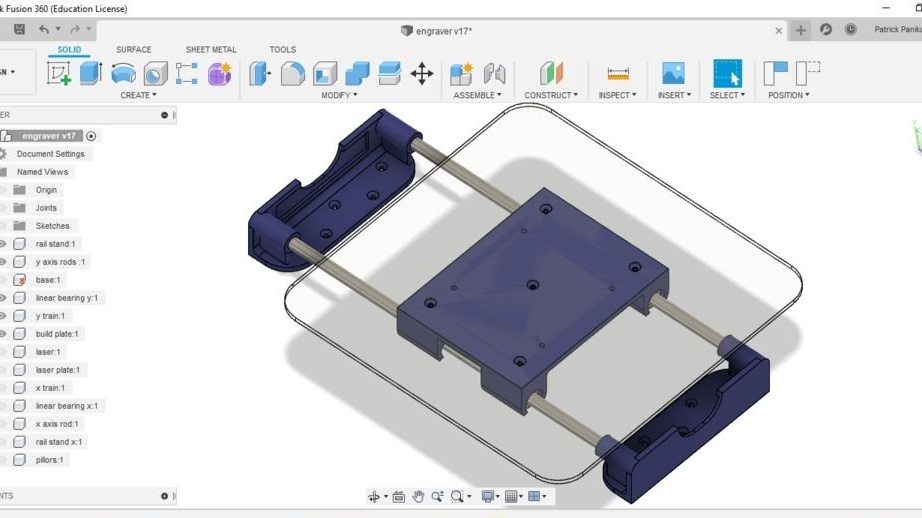
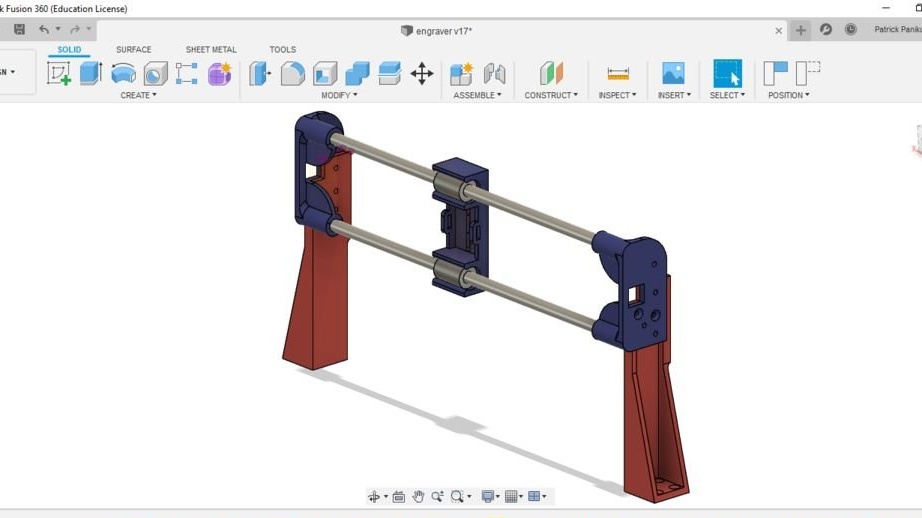
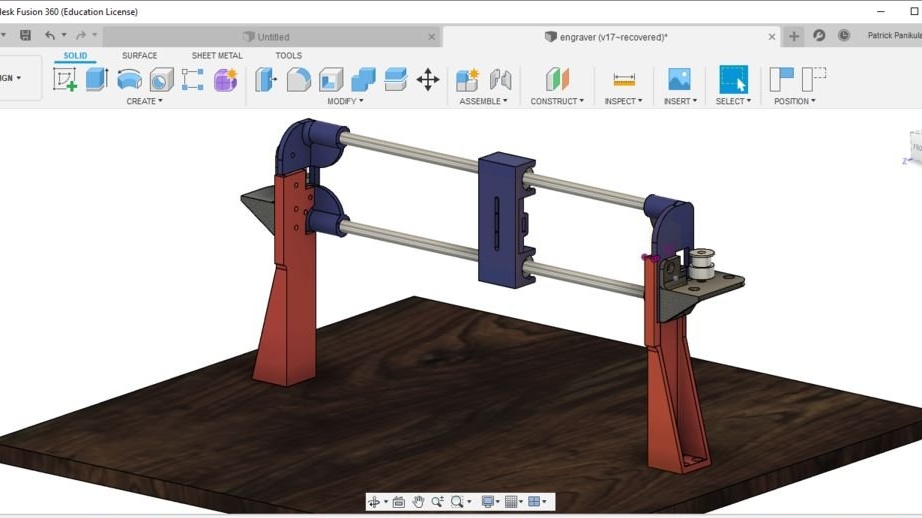
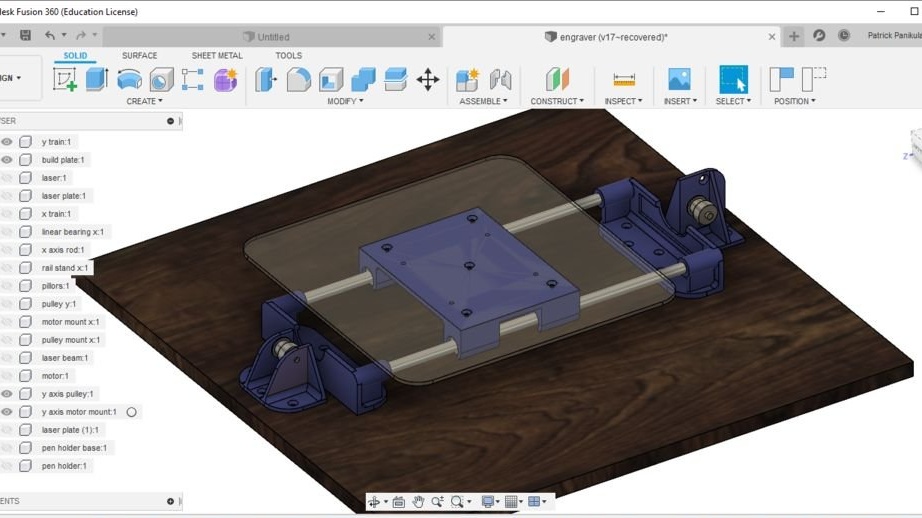
ขั้นตอนที่หนึ่ง: การออกแบบ
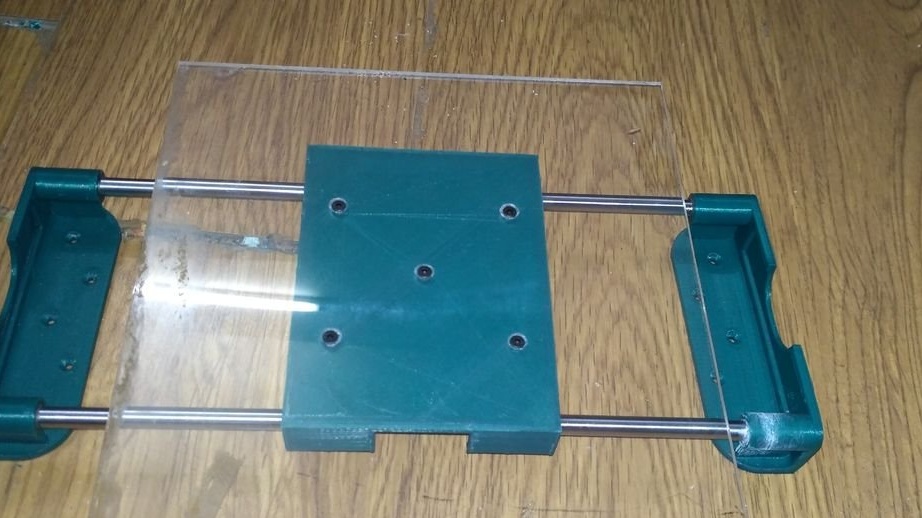
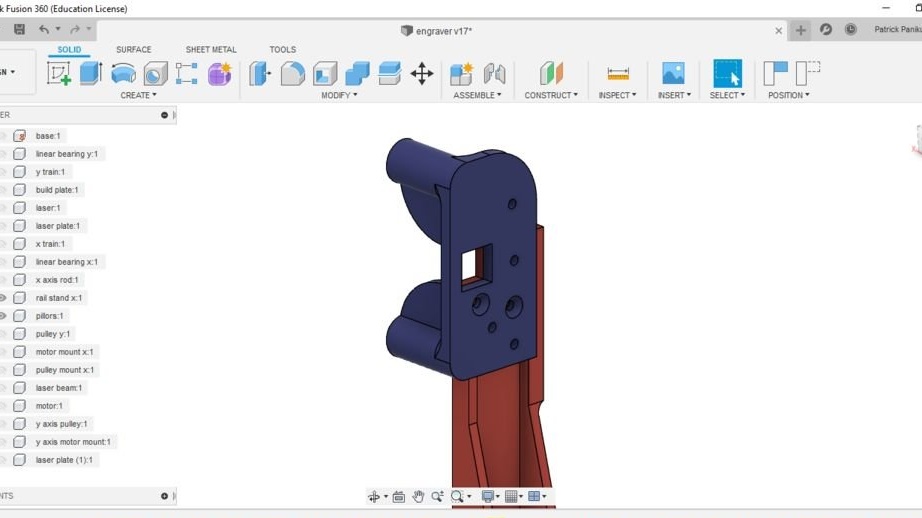
ตัวช่วยสร้างเริ่มต้นด้วยการออกแบบฐานและตัวยึดของแกน Y แกนเนื่องจากตัวยึดประกอบด้วยสองส่วนที่เหมือนกันฟังก์ชันกระจกใน Fusion 360 ทำให้การทำงานง่ายขึ้น ฟังก์ชั่นกระจกถูกนำมาใช้หลายครั้งในการพัฒนาของช่างแกะสลักเลเซอร์แตกต่างจากซอฟต์แวร์ CAD อื่น ๆ หนึ่งในคุณสมบัติที่ยอดเยี่ยมของ Fusion 360 คือช่วยให้คุณสามารถสร้างองค์ประกอบหลายรายการในหน้าจอเดียวพร้อมลิงก์ไปยังส่วนประกอบอื่น ๆ เช่น รูปแบบ สามารถออกแบบประกอบ
ความสูงของไกด์แกน X ขึ้นอยู่กับความยาวโฟกัสของเลเซอร์ที่ใช้ คุณเพียงแค่ต้องแน่ใจว่าความสูงของเลเซอร์อยู่ในช่วงนี้ การโฟกัสสุดท้ายของลำแสงเลเซอร์สามารถทำได้โดยการปรับเลนส์บนเลเซอร์
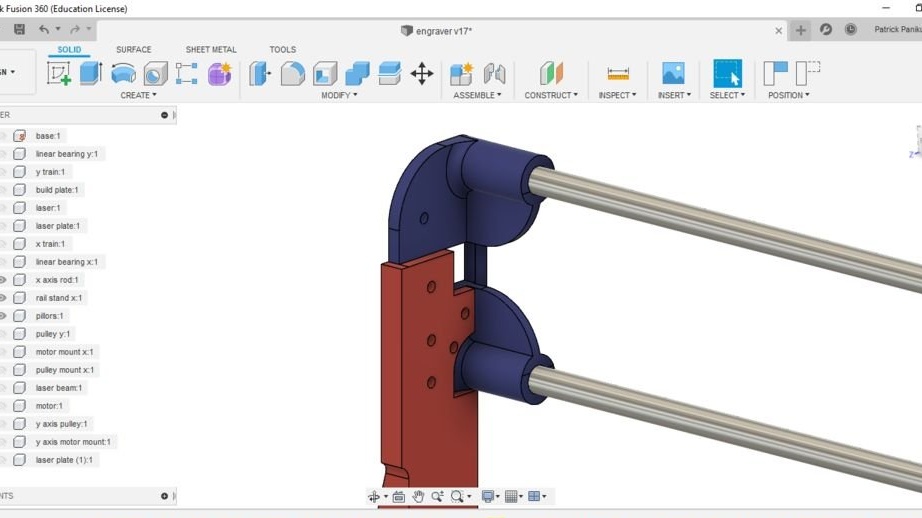
Fusion 360 ยังช่วยให้คุณสามารถเลือกลักษณะและวัสดุของส่วนประกอบเพื่อให้การออกแบบขั้นสุดท้ายดูสมจริง โปรแกรมช่วยให้คุณสามารถแปลงและบันทึกส่วนประกอบที่พัฒนาแล้วโดยตรงในรูปแบบ STL สำหรับการพิมพ์ 3 มิติ
ด้านล่างคุณสามารถดาวน์โหลดไฟล์ Fusion 360 ด้วยโครงการแกะสลัก
ช่างแกะสลักเลเซอร์ v16.f3d
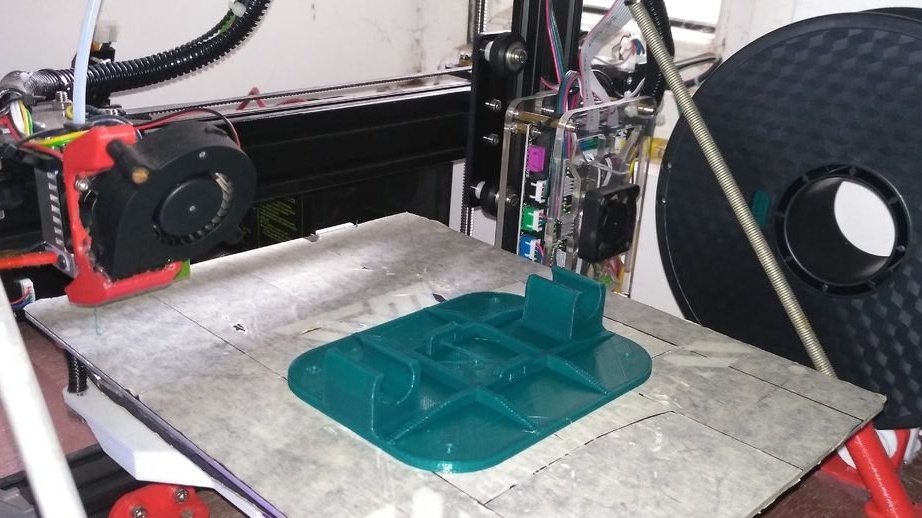
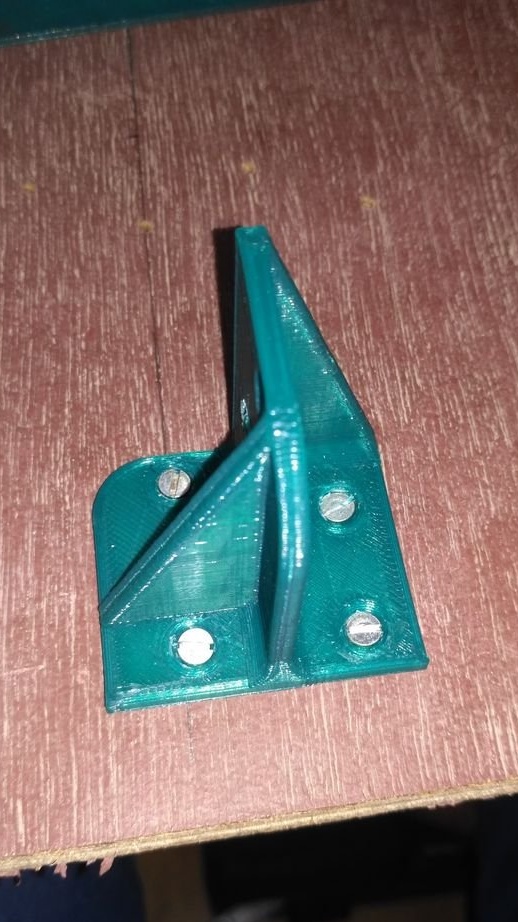
ขั้นตอนที่สอง: การพิมพ์ 3 มิติ
จากนั้นตัวช่วยสร้างจะเริ่มพิมพ์รายละเอียด ชิ้นส่วนทั้งหมดได้รับการออกแบบในลักษณะที่สามารถพิมพ์ได้อย่างง่ายดายในเครื่องพิมพ์ 3 มิติโดยไม่รองรับ
วิซาร์ดพิมพ์รายละเอียดเกี่ยวกับเครื่องพิมพ์ TEVO 3D
วัสดุ: PLA (สีเขียวเข้ม)
ความสูงของชั้น: 0.3 มม
บรรจุ: 30%
ความหนาของผนัง: 0.8 มม
ความหนาด้านบน / ล่าง: 0.9 มม
สามารถดาวน์โหลดไฟล์สำหรับพิมพ์โดยคลิกที่นี่ ลิงค์.

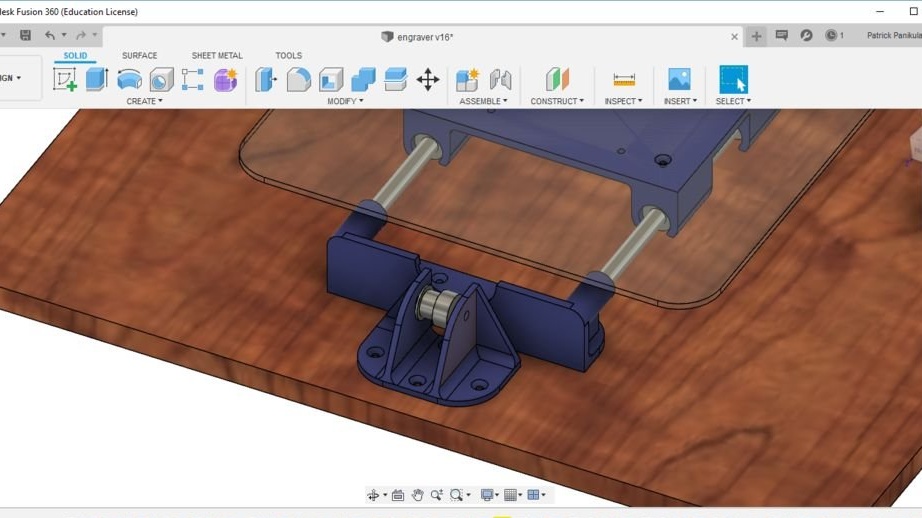
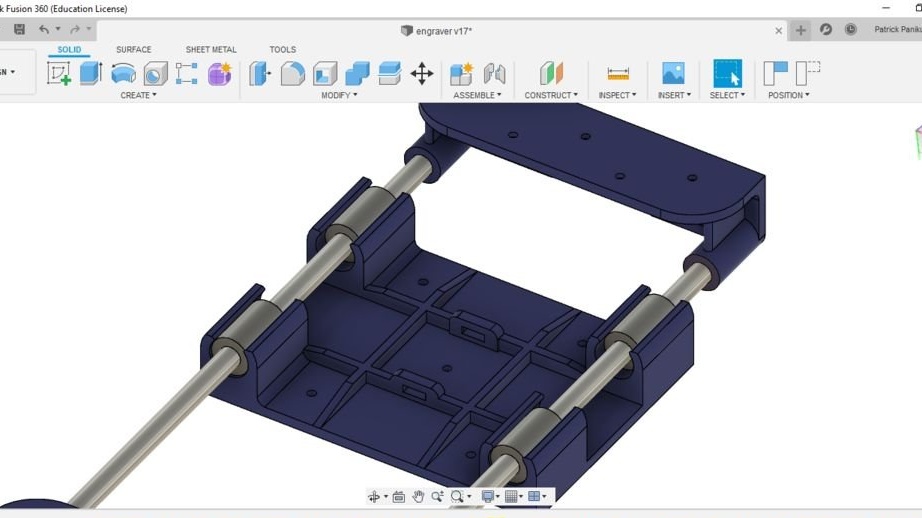
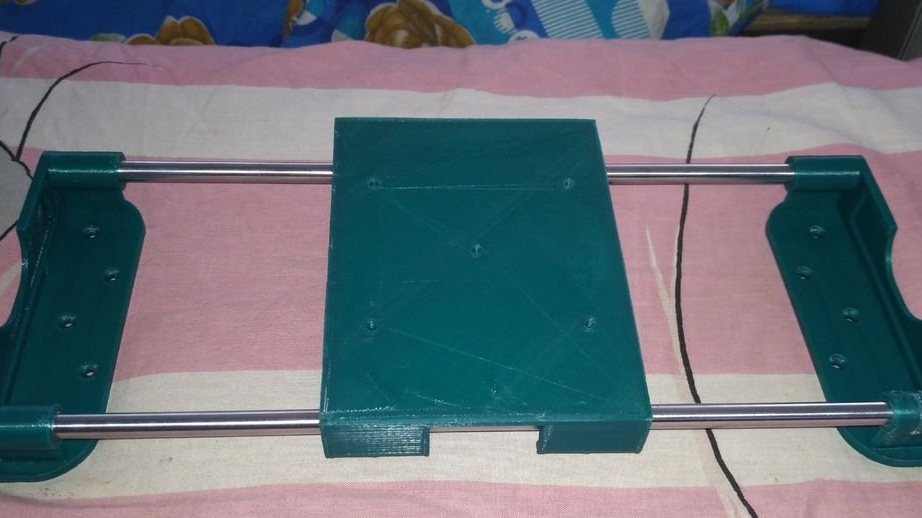
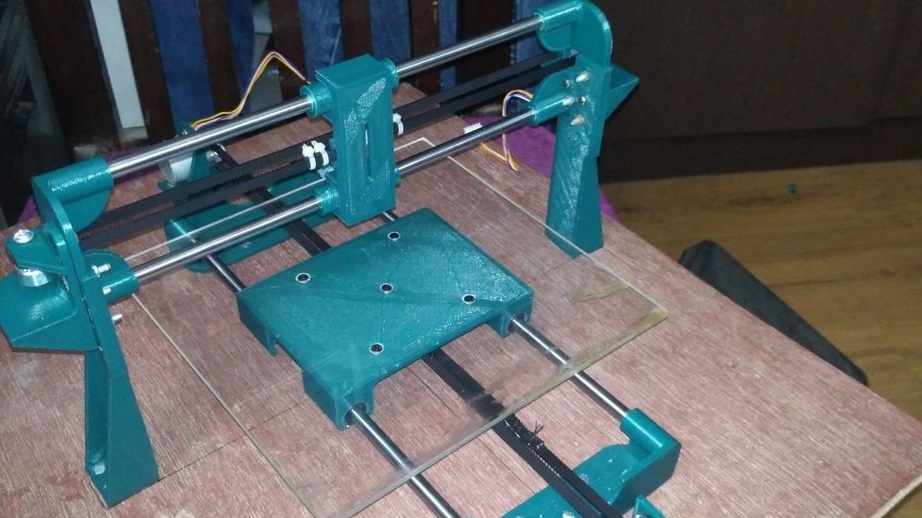
ขั้นตอนที่สาม: การประกอบแกน Y
ตัวช่วยสร้างแนะนำให้คุณเปิดไฟล์สร้าง Fusion 360 PC ก่อนประกอบ สิ่งนี้ช่วยให้กระบวนการสร้างเข้าใจได้ง่ายขึ้น
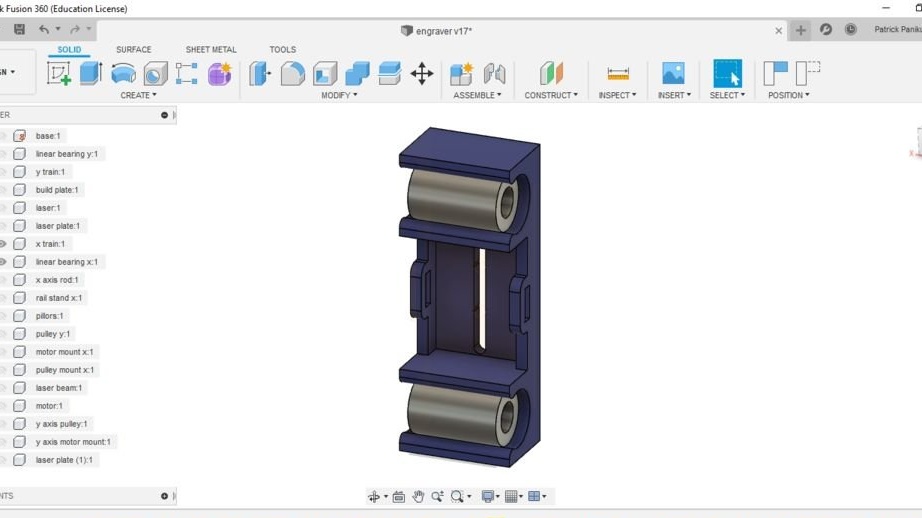
ตัวช่วยสร้างจะติดตั้งกระบอกและตลับลูกปืนเชิงเส้น ต้นแบบที่ออกแบบมาเพื่อหลีกเลี่ยงชิ้นส่วนติดกาวคือเช่น พอดีคับ แท่งจะต้องถูกเติมลงในที่นั่งด้วยค้อน
หลังจากประกอบแล้วตรวจสอบให้แน่ใจว่าแคร่ตลับหมึกเคลื่อนได้อิสระ
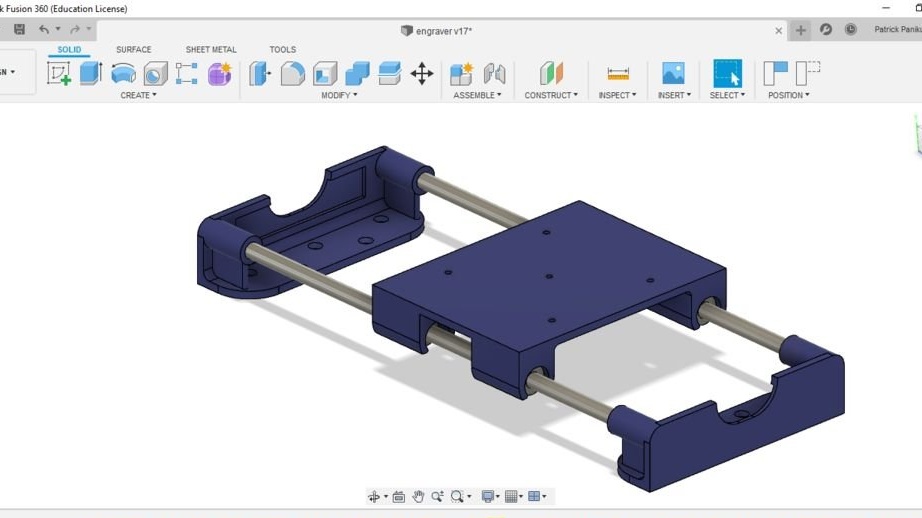



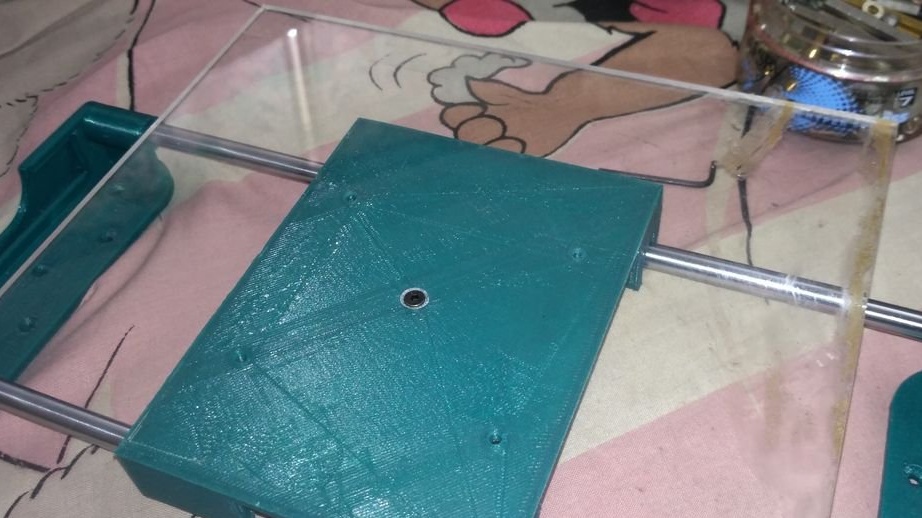
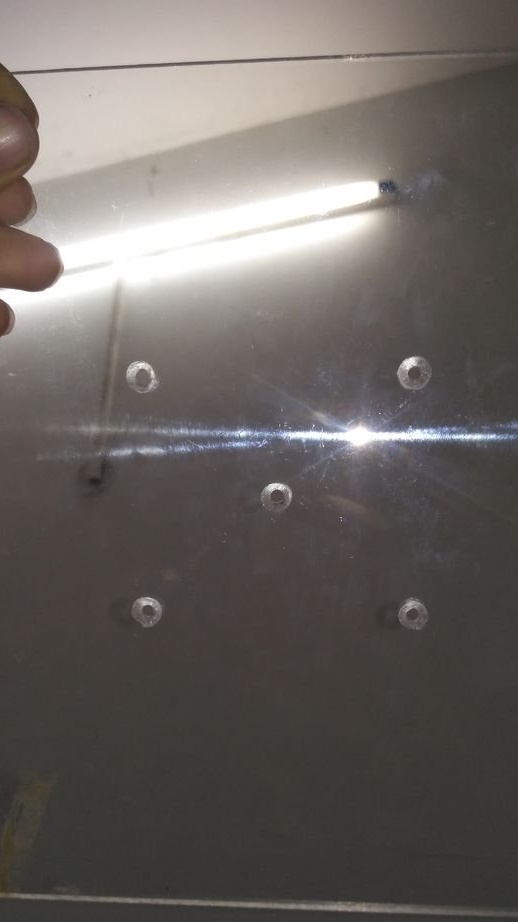
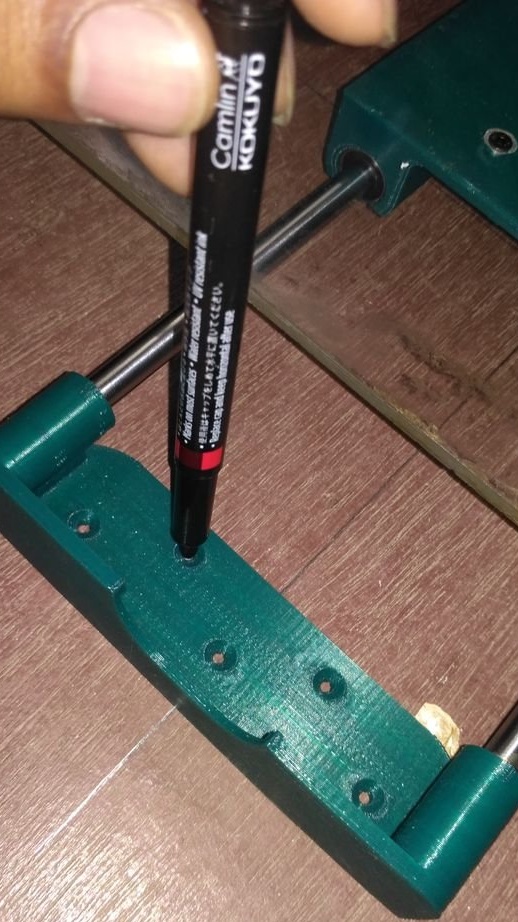
ขั้นตอนที่สี่: เดสก์ท็อป
เจาะรูบนแผ่นอะคริลิค ขันสกรูของแผ่นกระดาษเข้ากับแคร่ตลับหมึกและตั้งขอบของแผ่นกระดาษให้ขนานกับขอบของแคร่พิมพ์ ทำเครื่องหมายและเจาะรูยึดสี่รู ขันสกรูอะคริลิคเข้ากับแคร่ตลับหมึก





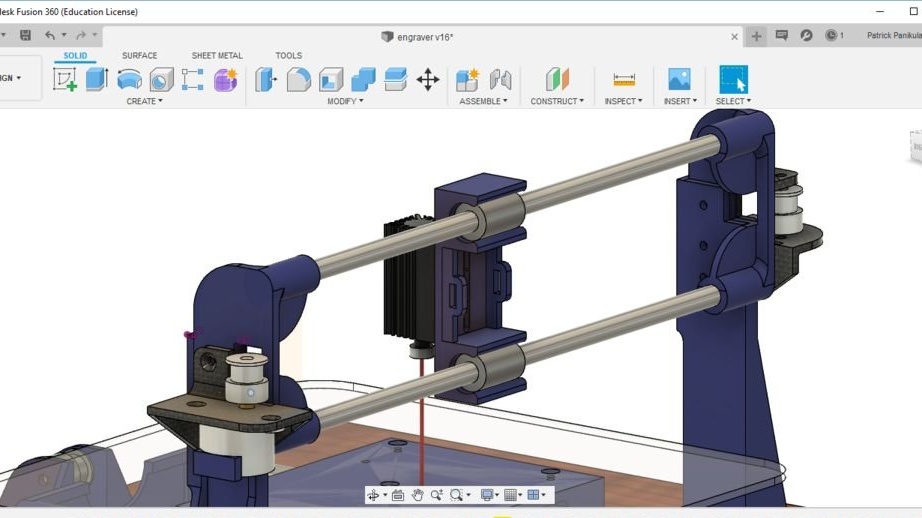
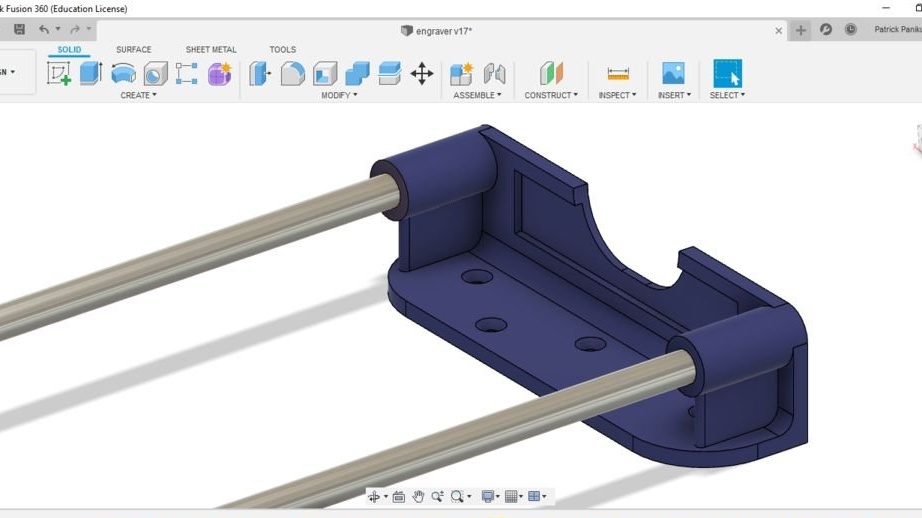
ขั้นตอนที่ห้า: แกน X
จากนั้นต้นแบบจะรวบรวมแกน X คำแนะนำสำหรับแกนนั้นถูกพิมพ์โดยผู้ชำนาญการเนื่องจากผู้ที่เขาซื้อกลายเป็นผู้บกพร่อง ตามเขาหลังจากบดและหล่อลื่นคู่มือเหล่านี้ทำงานไม่เลวร้ายยิ่งกว่าที่ซื้อ





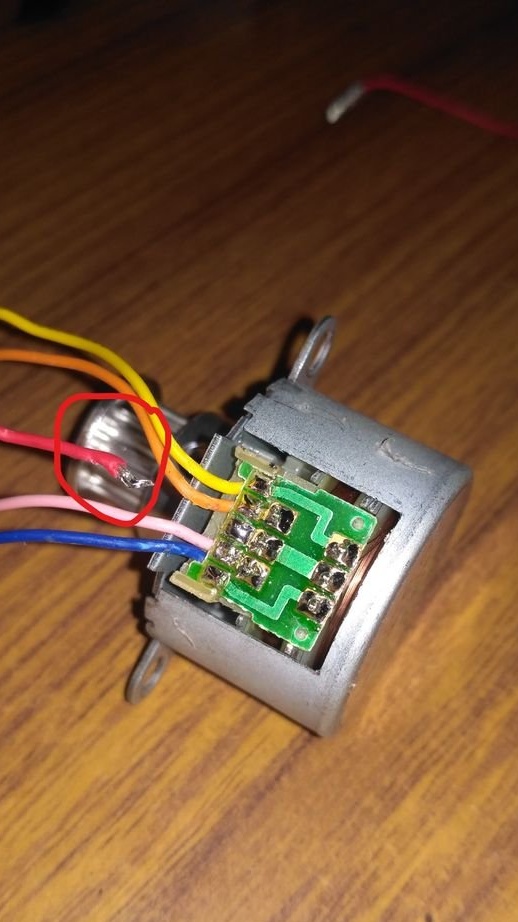
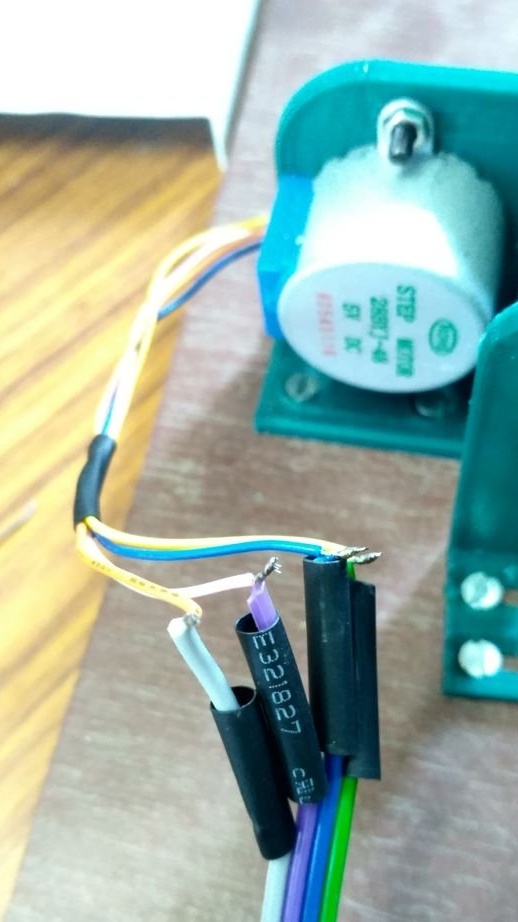
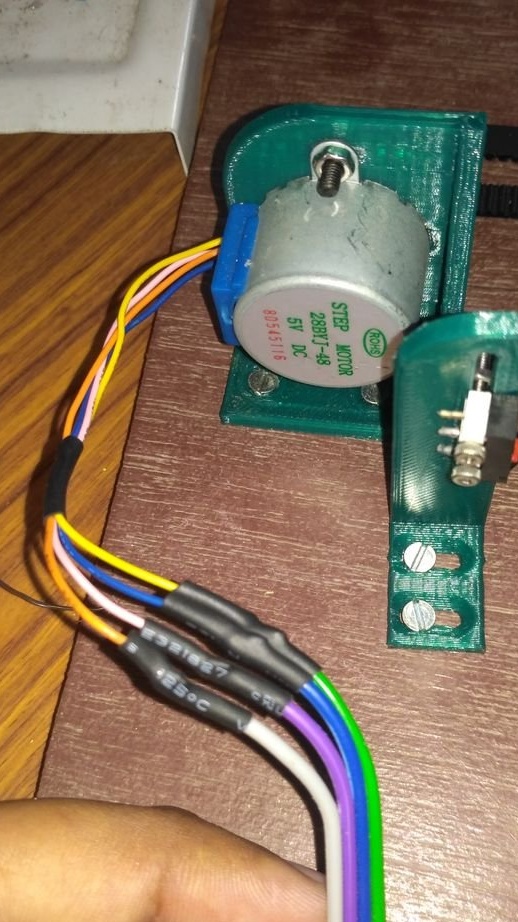
ขั้นตอนที่หก: การติดตั้งเครื่องยนต์ unipolar 28BYJ-48 อีกครั้งให้เป็นสองขั้ว
มีสองเหตุผลหลักที่คุณต้องเปลี่ยนมอเตอร์ unipolar ให้เป็น bipolar motor
อัลกอริธึมการควบคุมมอเตอร์แบบไบโพลาร์โดยใช้ไดรเวอร์มอเตอร์ A4988 นั้นง่ายกว่าการควบคุมมอเตอร์แบบยูนิโพล
บอร์ดเอ็กซ์แพนชันรองรับมอเตอร์แบบไบโพลาร์เท่านั้น
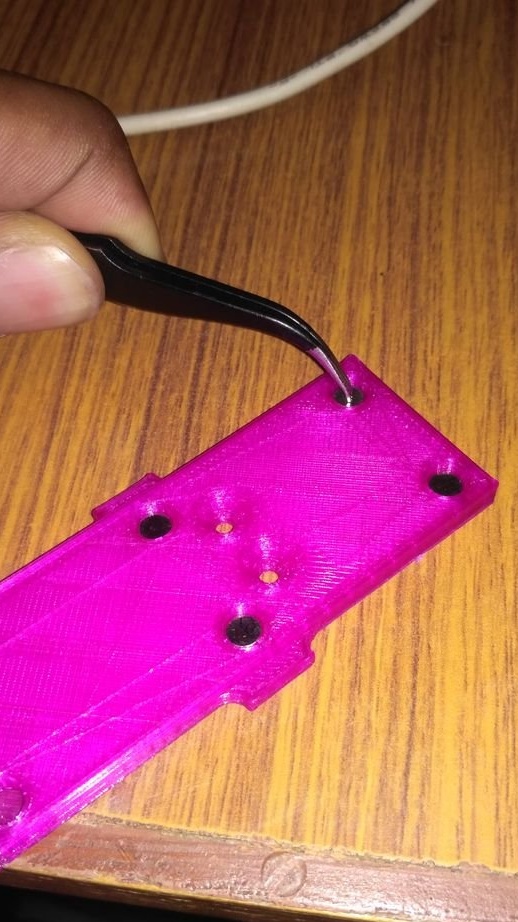
คุณสามารถสร้างเครื่องยนต์ใหม่ได้ในสามขั้นตอน
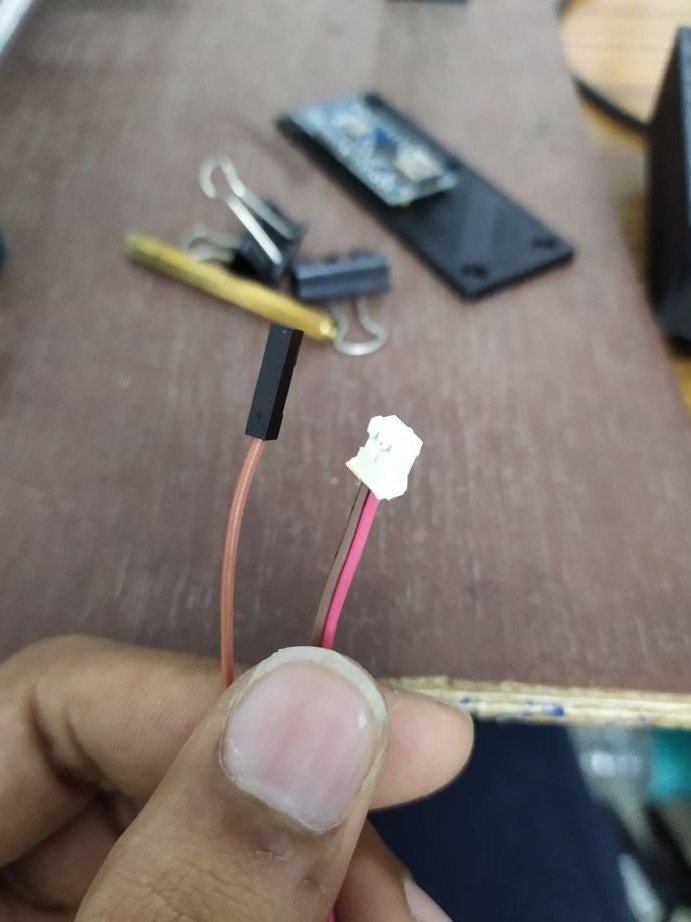
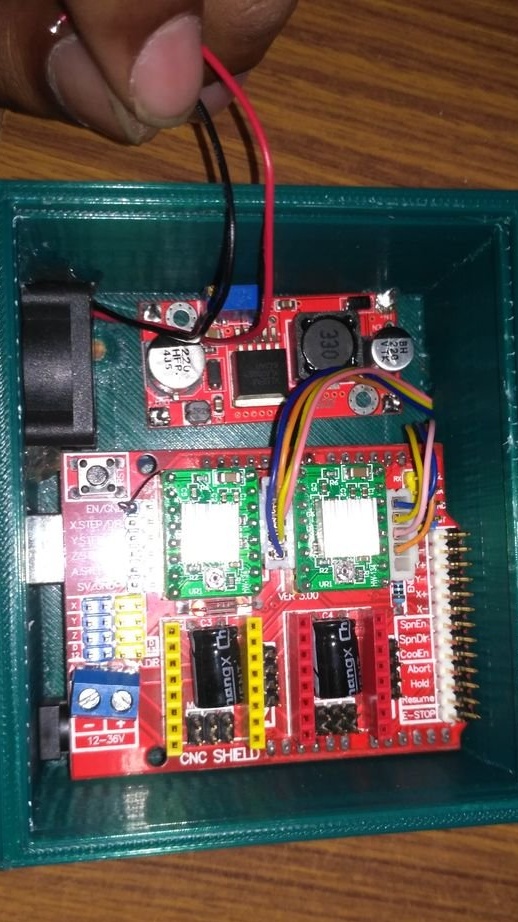
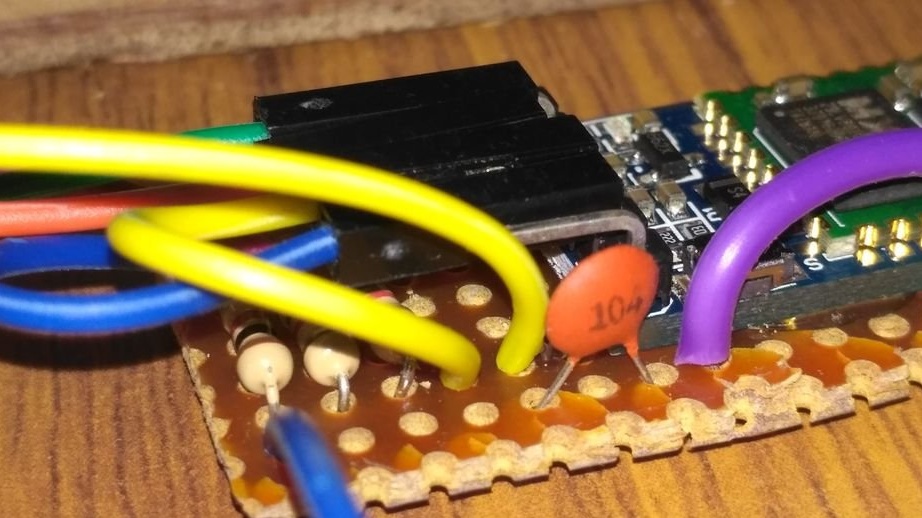
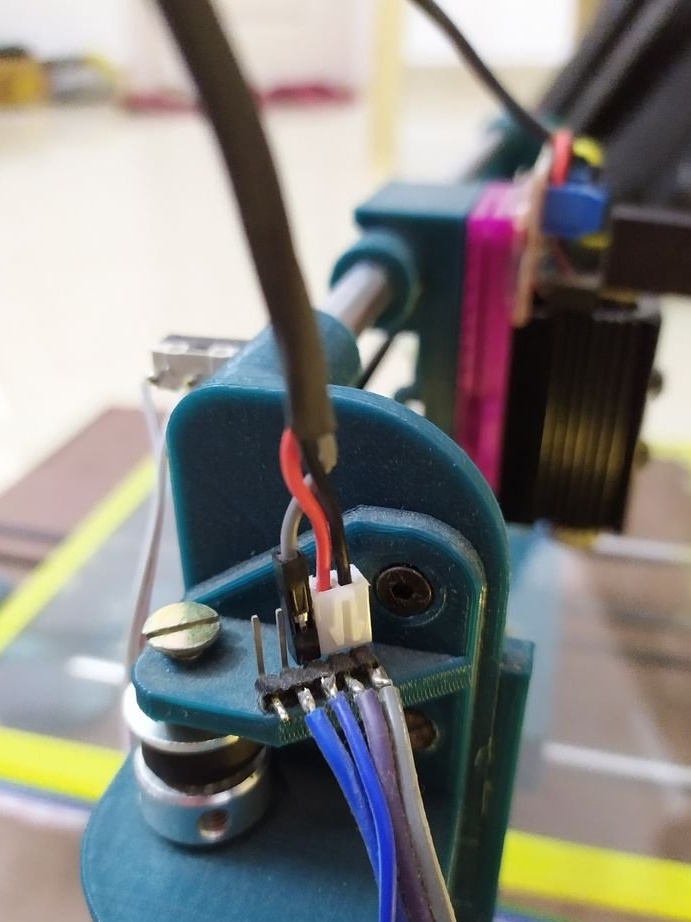
เปิดกล่องพลาสติกสีฟ้าถอดสายสีแดงออกจากบอร์ดดังที่แสดงในภาพแรก
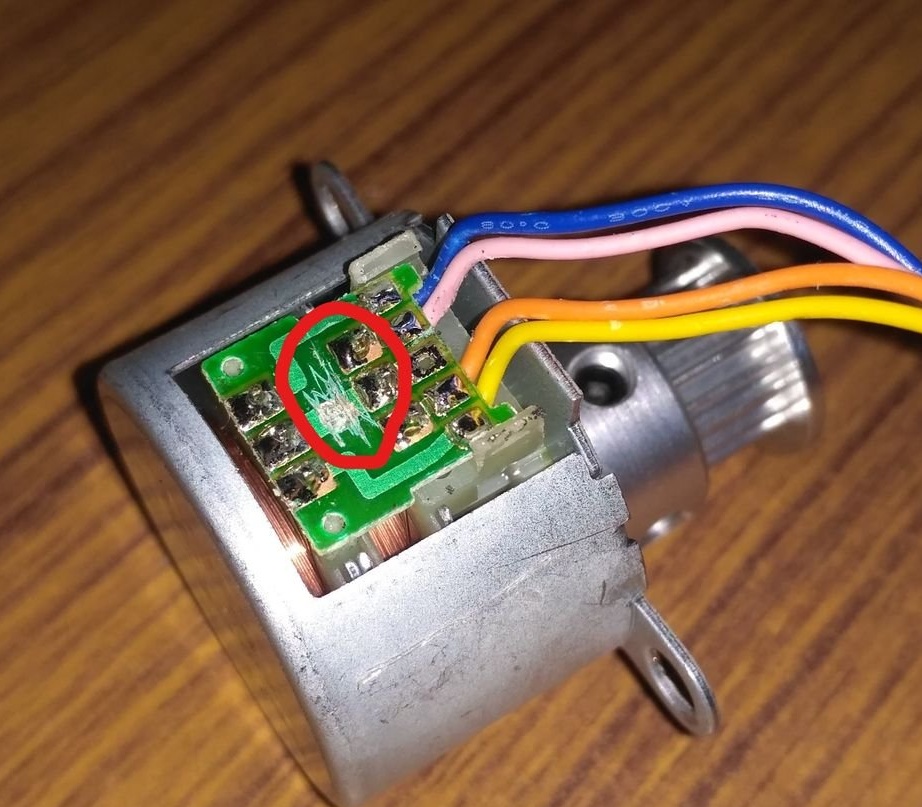
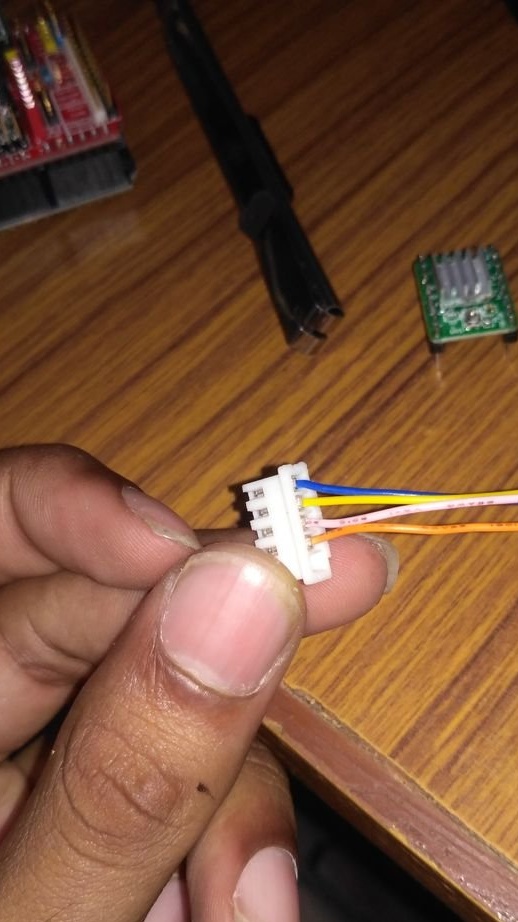
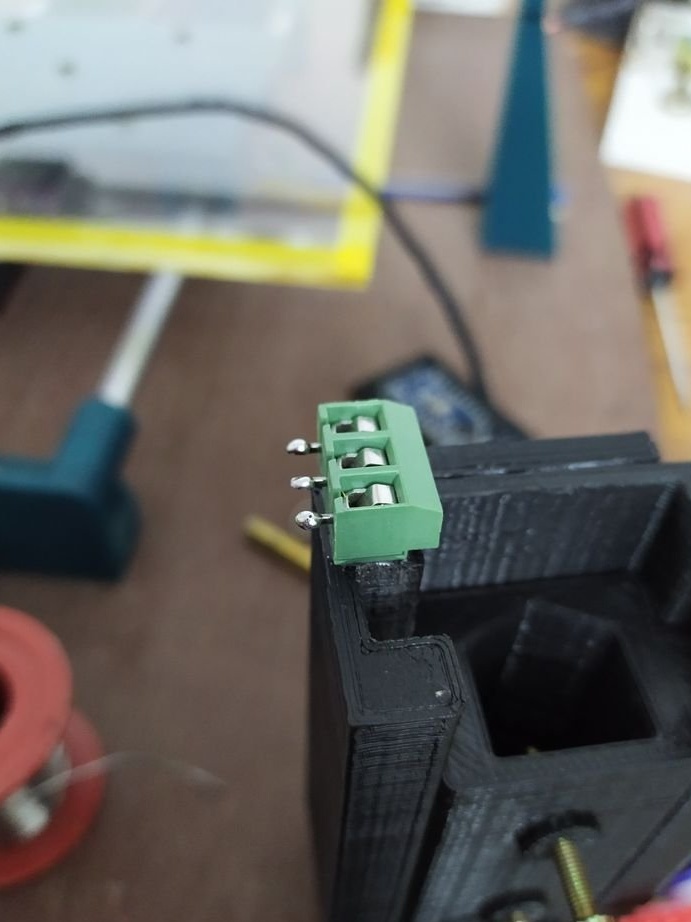
ตอนนี้คุณต้องทำให้แทร็กเสียหายเช่นเดียวกับในรูปที่สองและเปลี่ยนสายไฟในบล็อกเช่นเดียวกับในรูปที่สาม
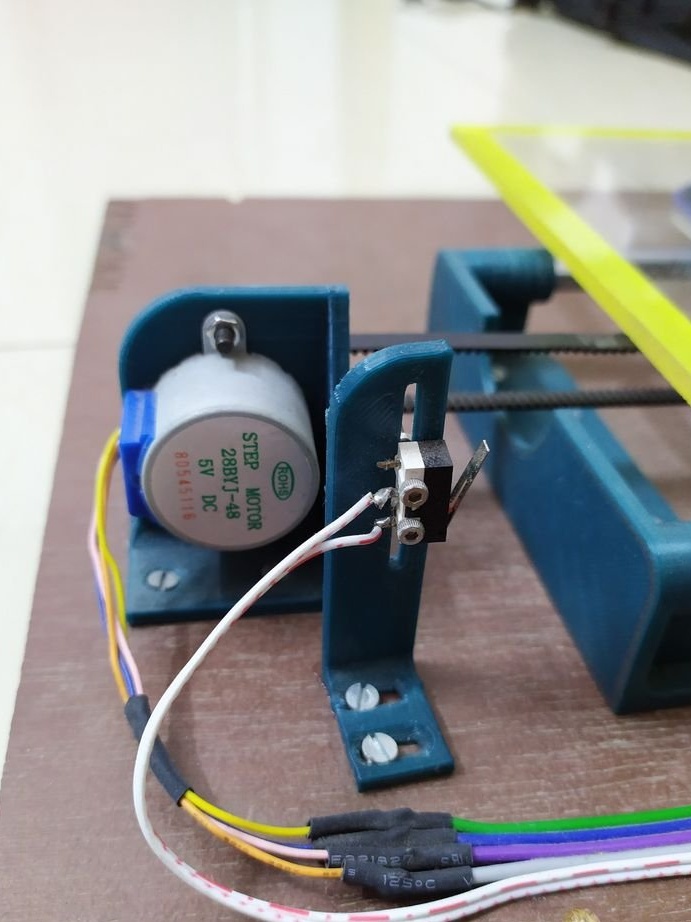
ขั้นตอนที่เจ็ด: การติดตั้งมอเตอร์, สายพาน, สายพาน
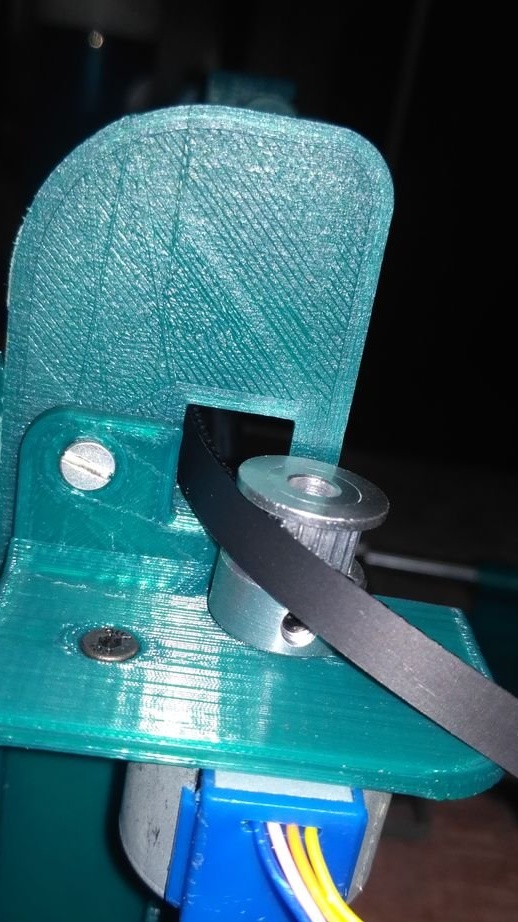
ติดตั้งเครื่องยนต์ บนเพลาเครื่องยนต์จะยึดรอกไว้ ลูกรอกที่สองตั้งอยู่บนฝั่งตรงข้ามของเครื่องยนต์ ยึดปลายสายพานให้แน่น ผ่านส่วนปลายที่สองของสายพานผ่านรอกและยังยึด



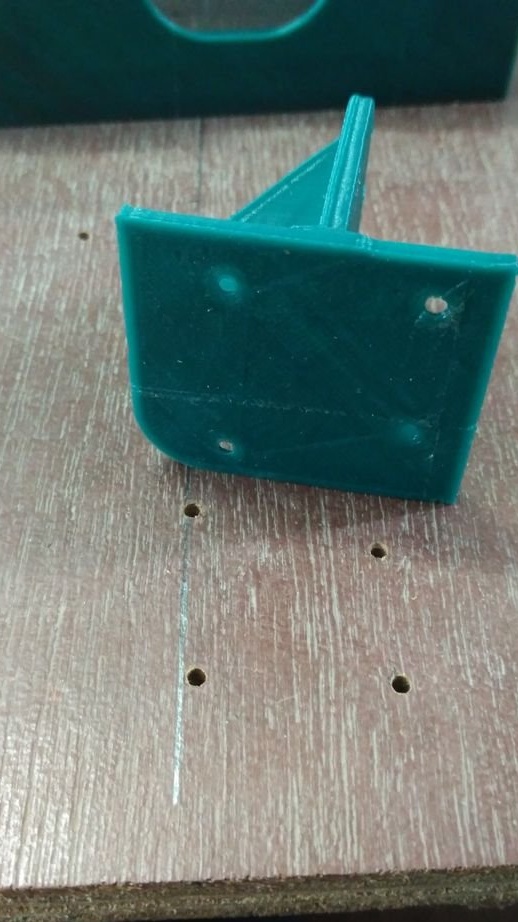
ขั้นตอนที่แปด: รากฐาน
ฐานทำจากไม้อัด สำหรับเขาแล้วอาจารย์จะแนบแกน X







ขั้นตอนที่เก้า: แกน Y
รวบรวมแกน Y นี่เป็นขั้นตอนที่ยาก
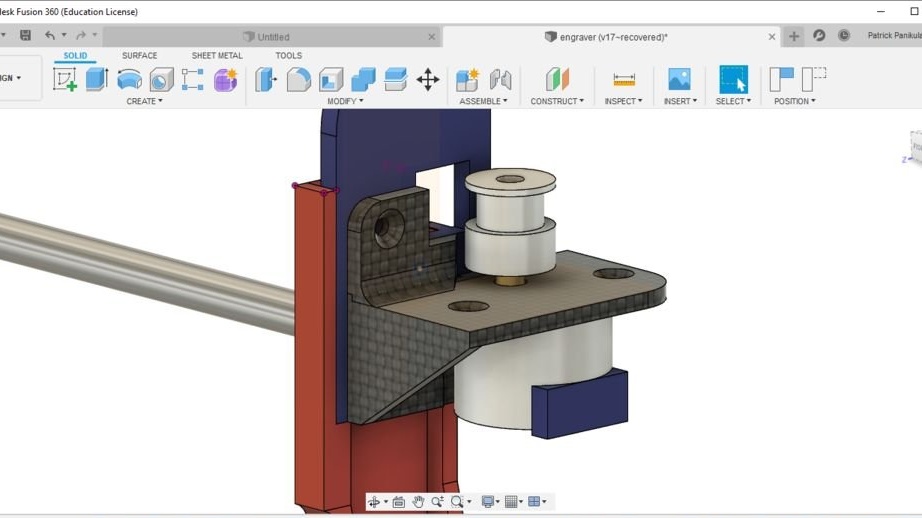
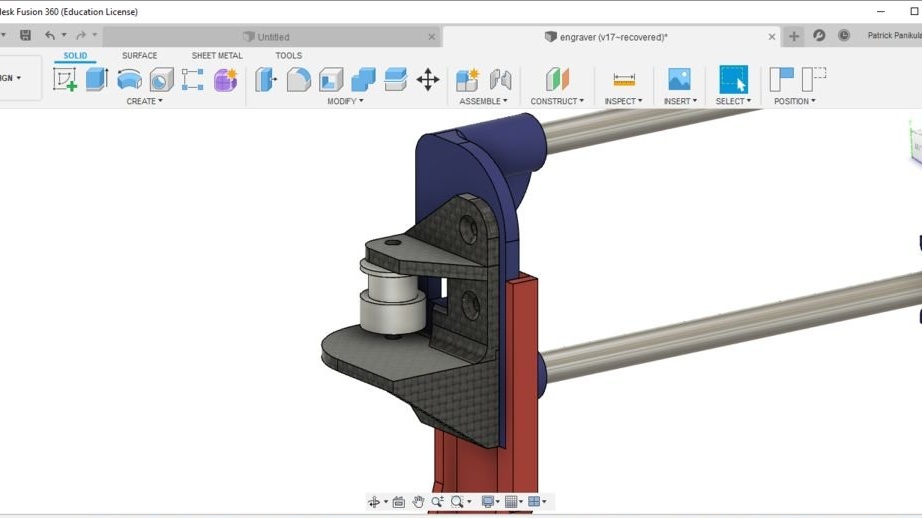
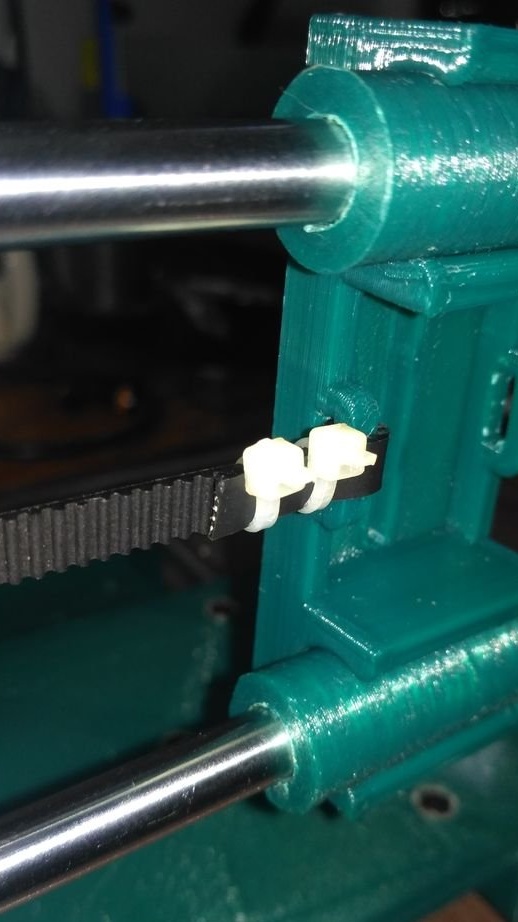
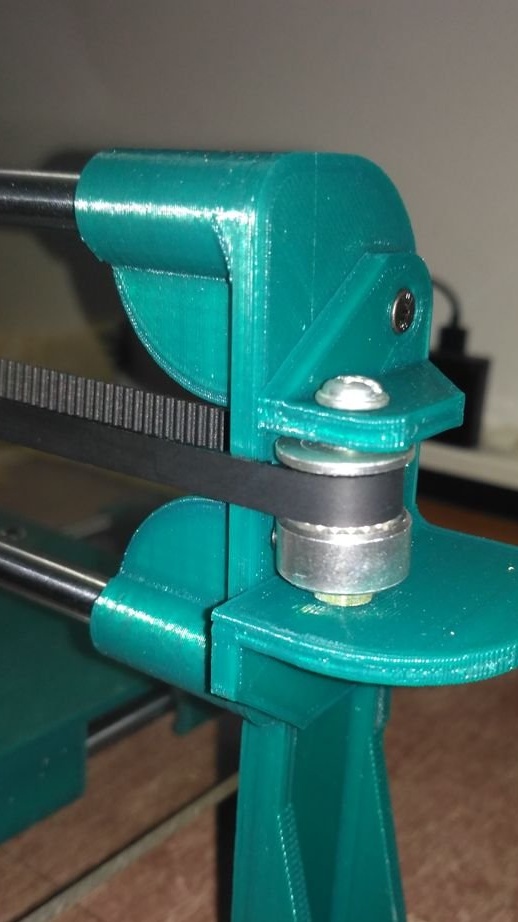
ประกอบตัวยึดรอกโดยใช้ตัวยึดรอกแกน Y, รอก, สลักเกลียว 40 มม. / น็อต M4 และน็อตและแหวนโลหะดังที่แสดงในภาพแรกสองภาพ


ตอนนี้ผูกปลายด้านหนึ่งของสายพานราวลิ้นเข้ากับหนึ่งในสล็อตภายใต้แคร่เลื่อนแกน Y
ผ่านปลายสายพานที่ว่างผ่านชุดรอกที่คุณทำก่อนหน้านี้จากนั้นติดตั้งเข้ากับร่องที่สองซึ่งอยู่ใต้แคร่แกน Y
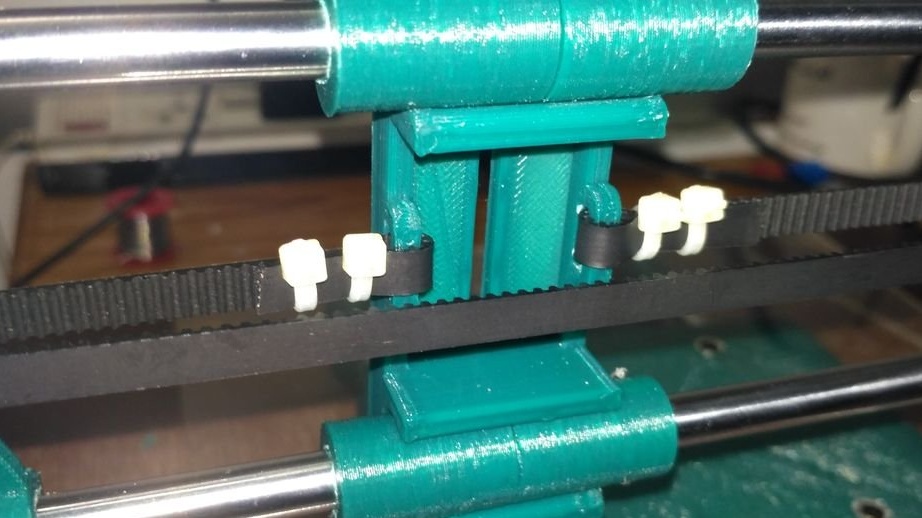
หลังจาก 3 ขั้นตอนเหล่านี้เสร็จสมบูรณ์คุณจะต้องขันสกรูชุดแกน Y เข้ากับฐานไม้อัด



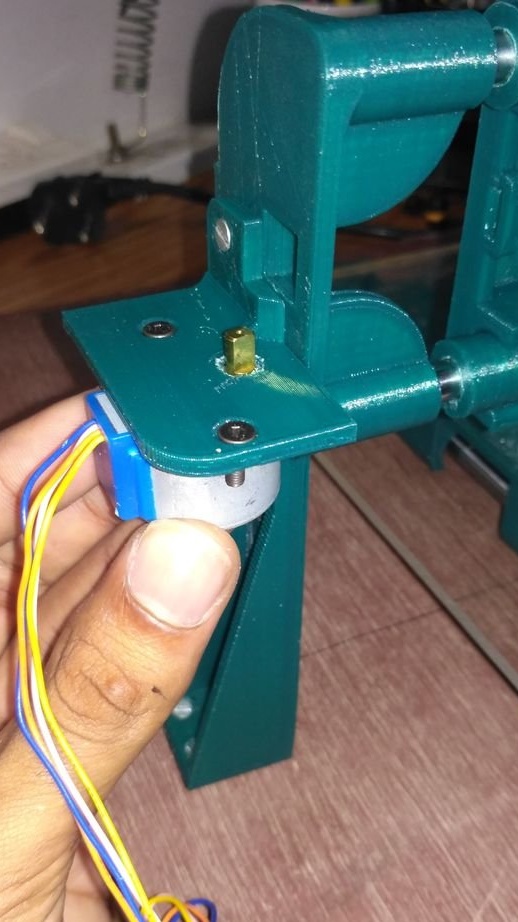
ติดตั้งสเต็ปเปอร์มอเตอร์เข้ากับตัวยึดมอเตอร์แกน Y โดยใช้สลักเกลียวและถั่ว 12 มม. M3 สองตัว
ตอนนี้ขันสกรูยึดแกน Y และตัวยึดเครื่องยนต์เข้ากับฐานไม้อัดทำเช่นนี้หลังจากปรับทั้งสองด้านเพื่อให้ได้ความตึงของสายพานที่ถูกต้อง เครื่องดึงสายพานจะถูกเพิ่มเข้าไปในภายหลัง

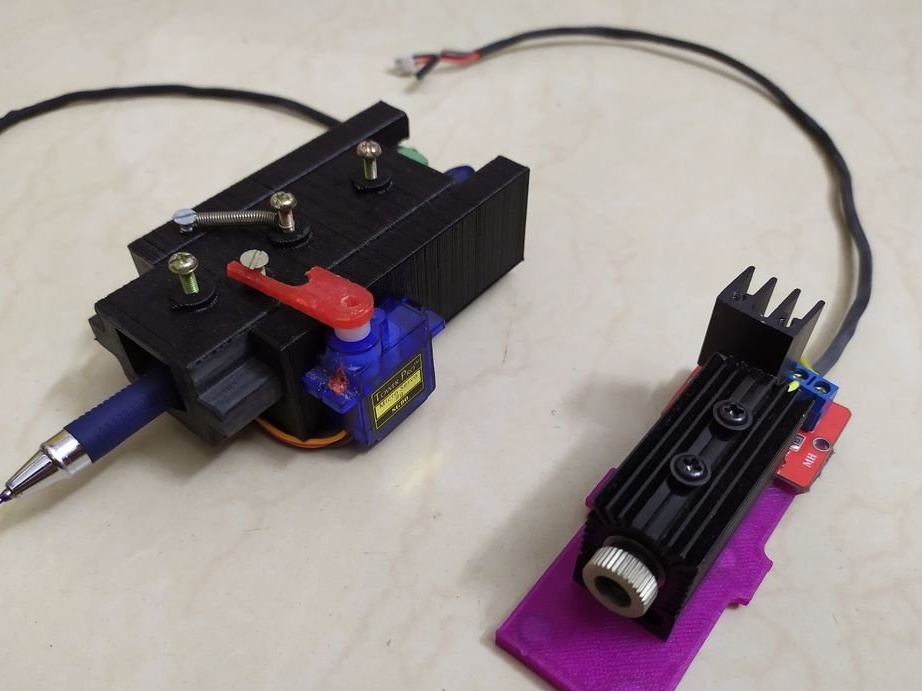
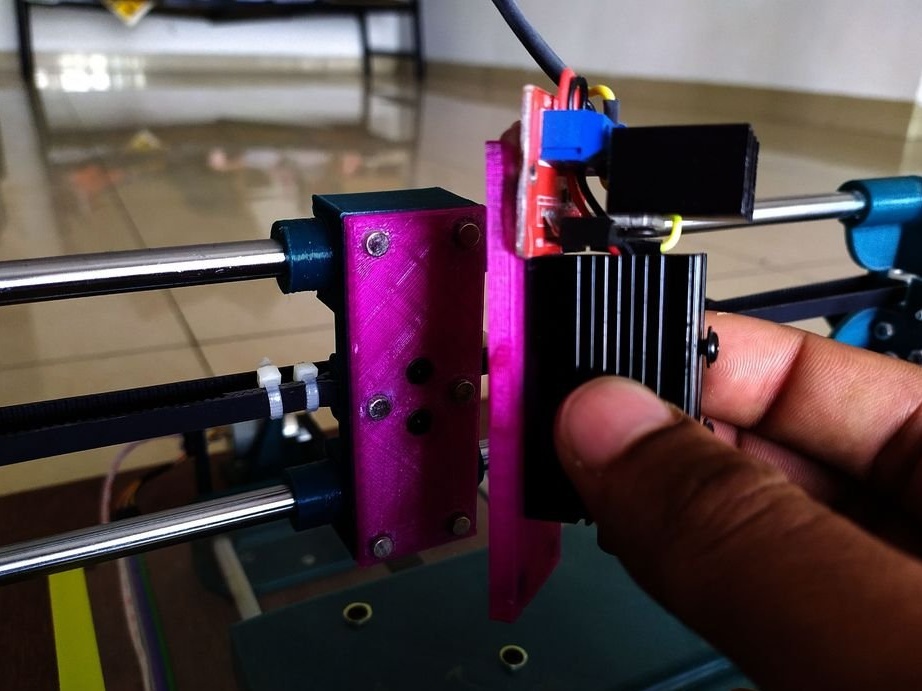
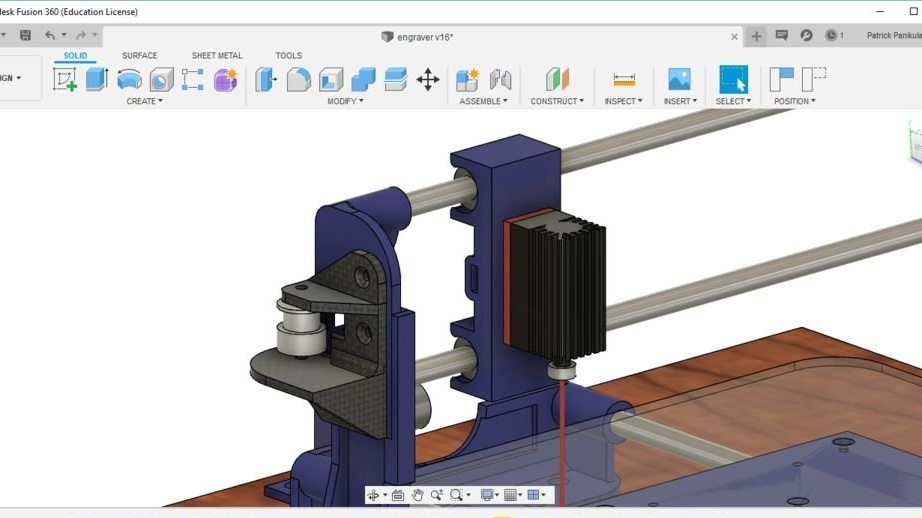
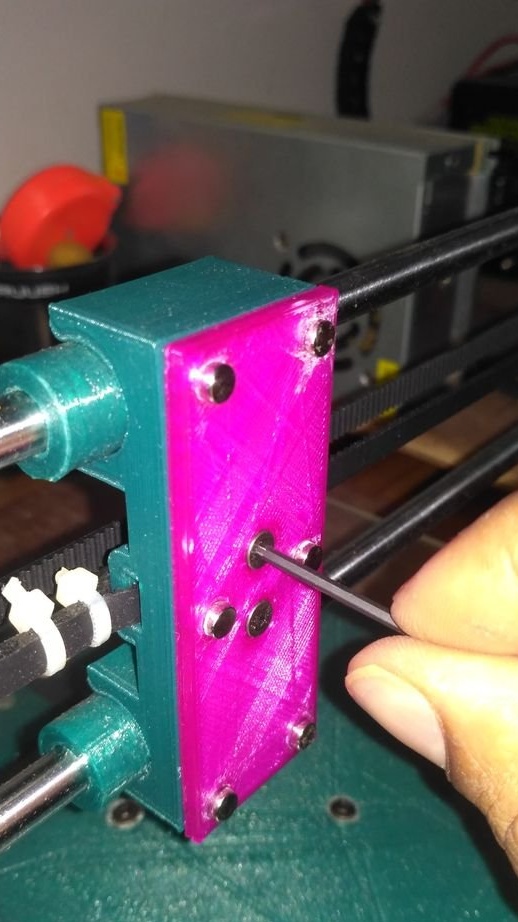
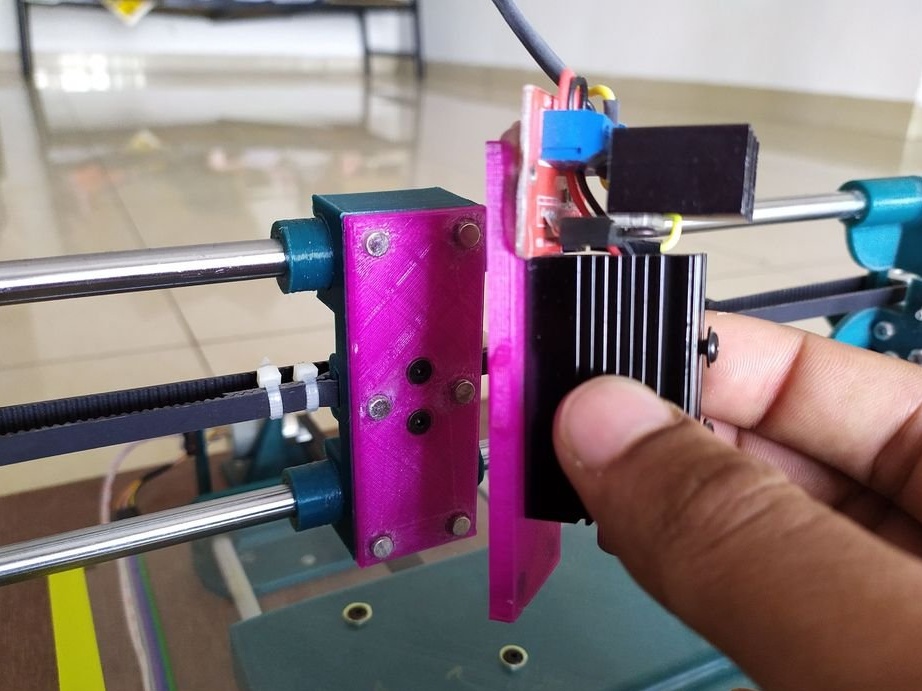
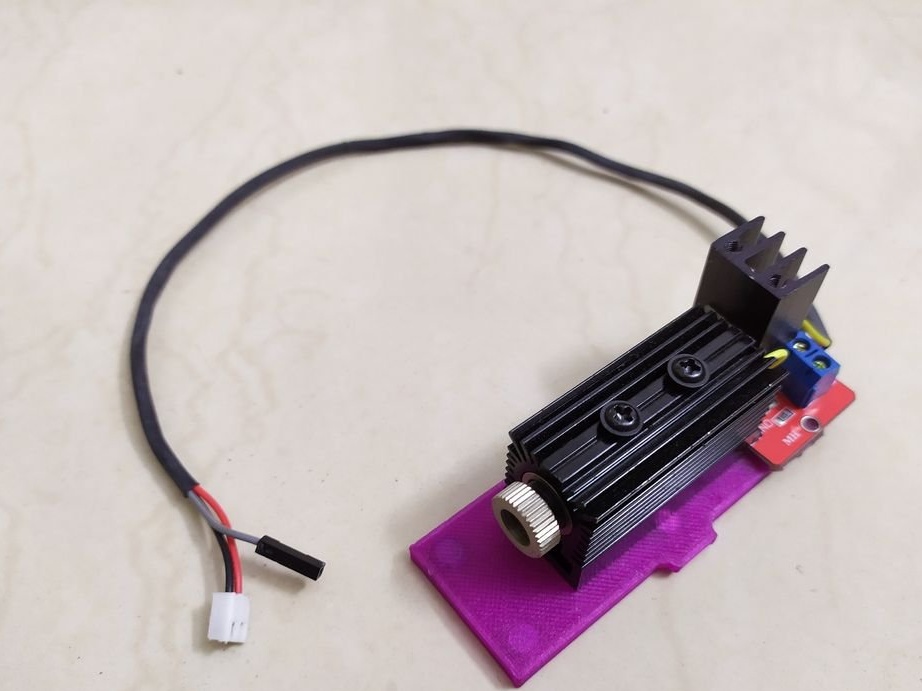
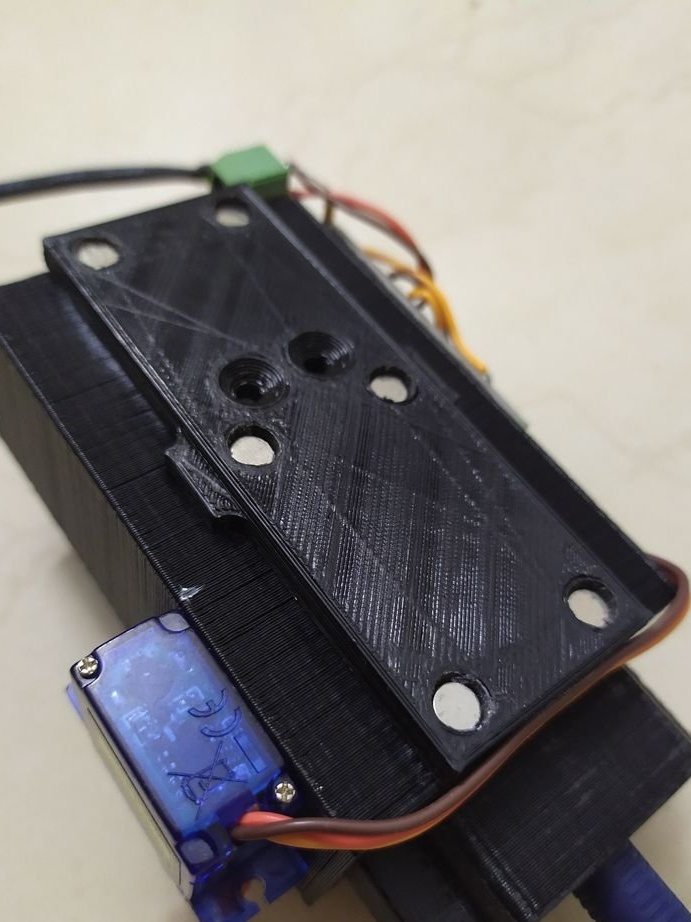
ขั้นตอนที่สิบ: โมดูลเลเซอร์
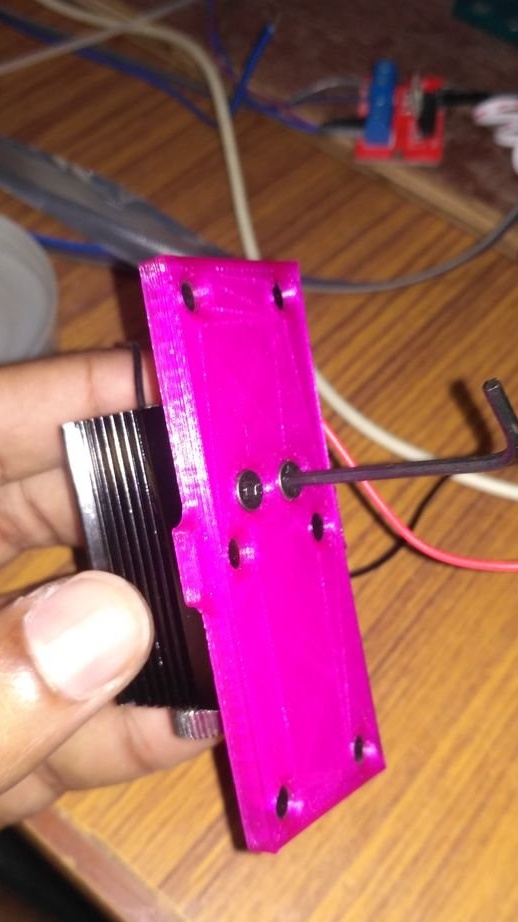
ตามที่ระบุไว้ในข้อกำหนดเครื่องใช้การเปลี่ยนโมดูลเลเซอร์อย่างรวดเร็วด้วยโมดูลผู้บริหารอื่น สำหรับเรื่องนี้อาจารย์ทำชิ้นส่วนสี่เหลี่ยมสองรูปแบบ (ฝาปิด) ติดตั้งแม่เหล็กนีโอดิเมียมหกตัวในแต่ละอัน ฝาครอบด้านหนึ่งติดอยู่กับแกน X โมดูลเลเซอร์จะติดกับส่วนอื่น
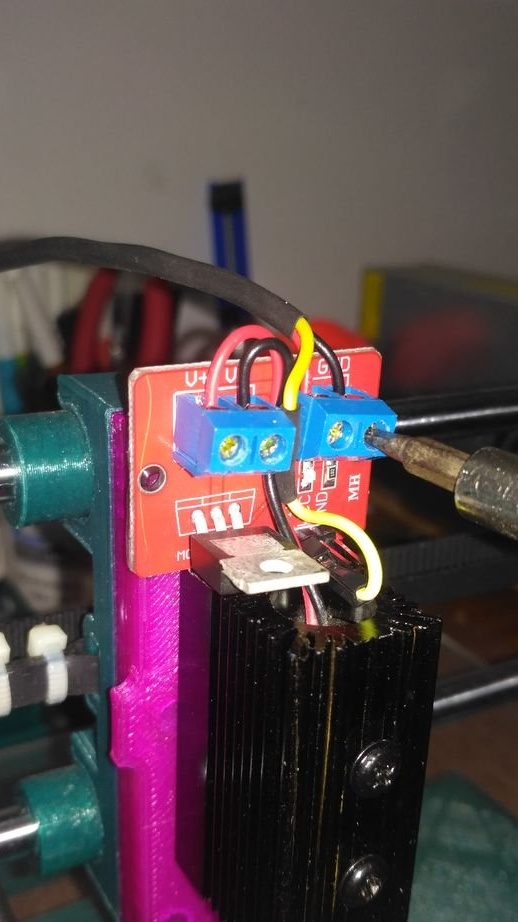
สายไฟมีการติดตั้งดังนี้
+ และ - เลเซอร์เชื่อมต่อกับ V + และ V- ตามลำดับของโมดูล MOSFET กำลังเชื่อมต่อกับ VCC และ GND ตามลำดับ สายสัญญาณเชื่อมต่อกับขาสัญญาณของโมดูล MOSFET




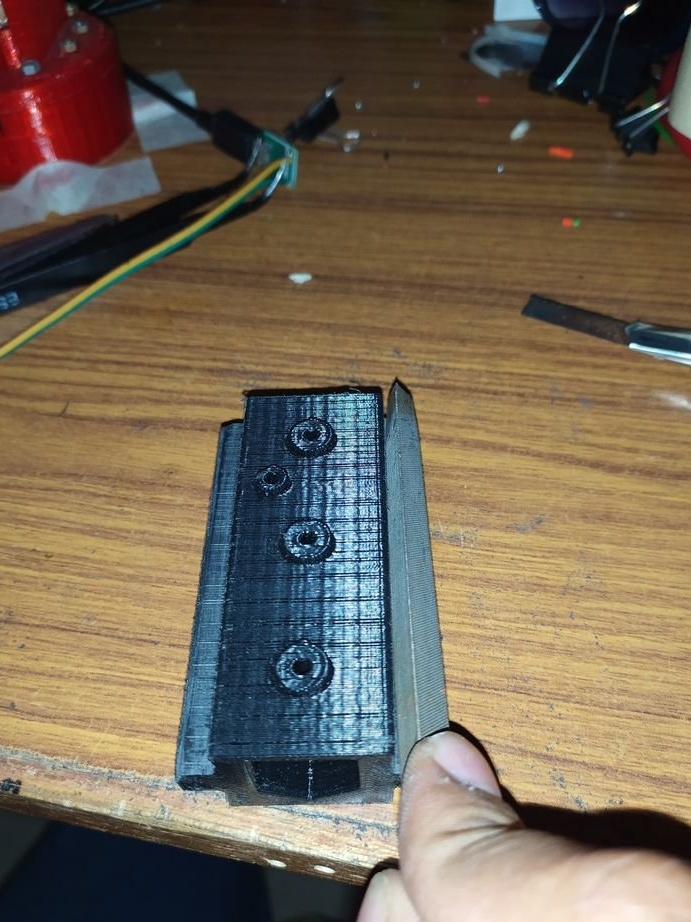
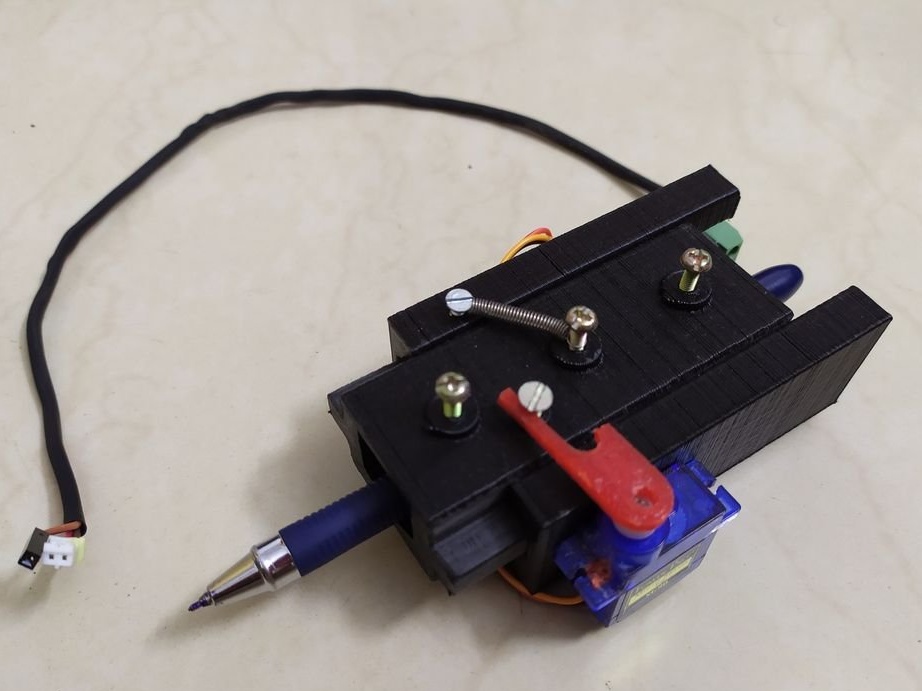
ขั้นตอนที่สิบเอ็ด: พล็อตเตอร์
รวบรวมพล็อตเตอร์ ทันทีที่ทั้งสองส่วนถูกพิมพ์ออกมาเจ้านายก็จะทำการขัดเงาเครื่องบินที่สัมผัสกันทำให้มันเรียบด้วยไฟล์และกระดาษทรายจนกว่าชิ้นส่วนทั้งสองจะลื่นพร้อมกันด้วยแรงเสียดทานน้อยมาก



ตอนนี้ขันสกรูขนาด 40 มม. M3 และตั้งสปริง
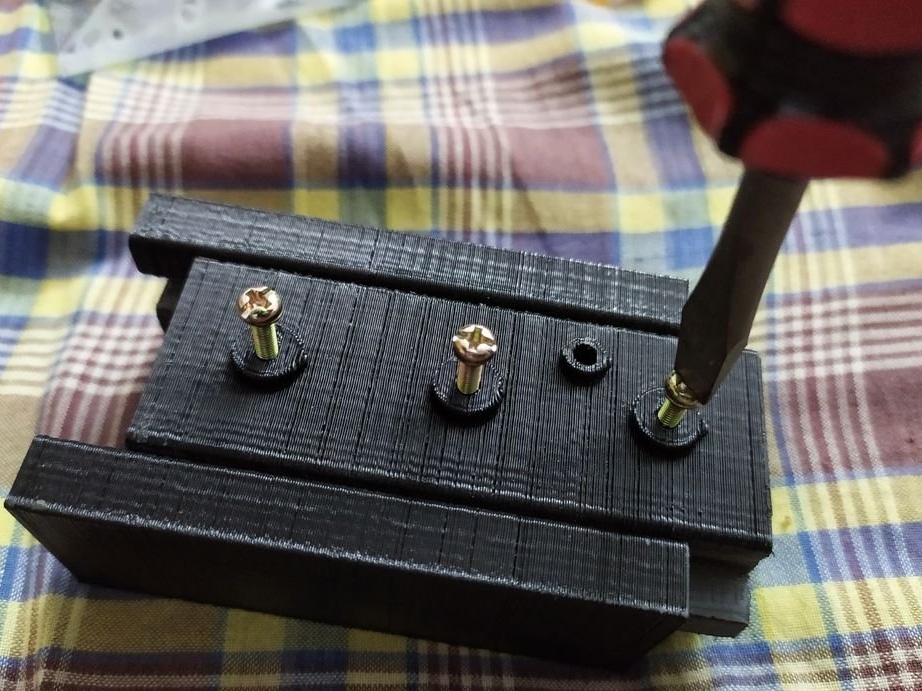
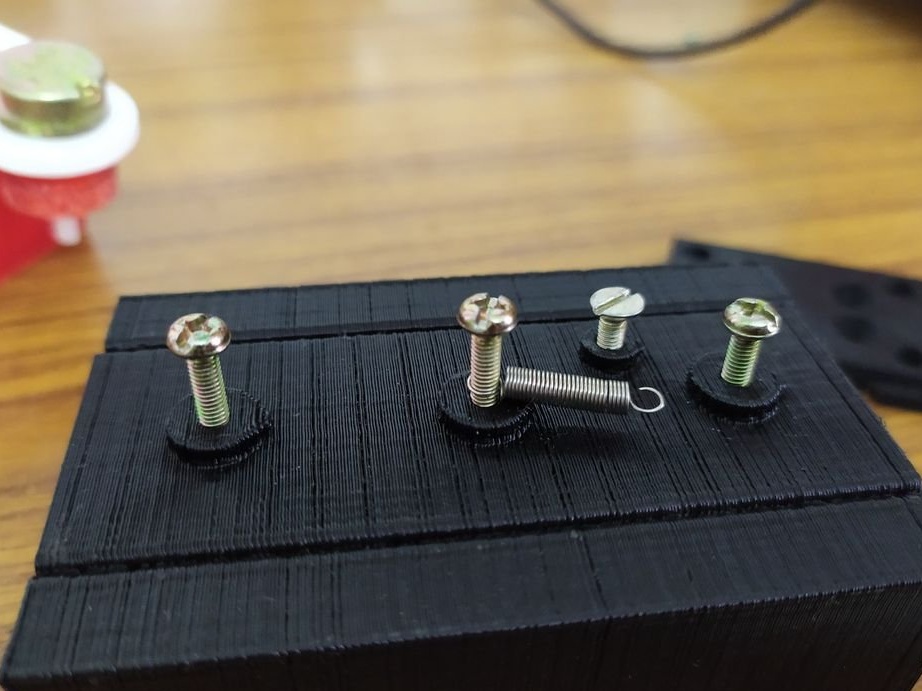
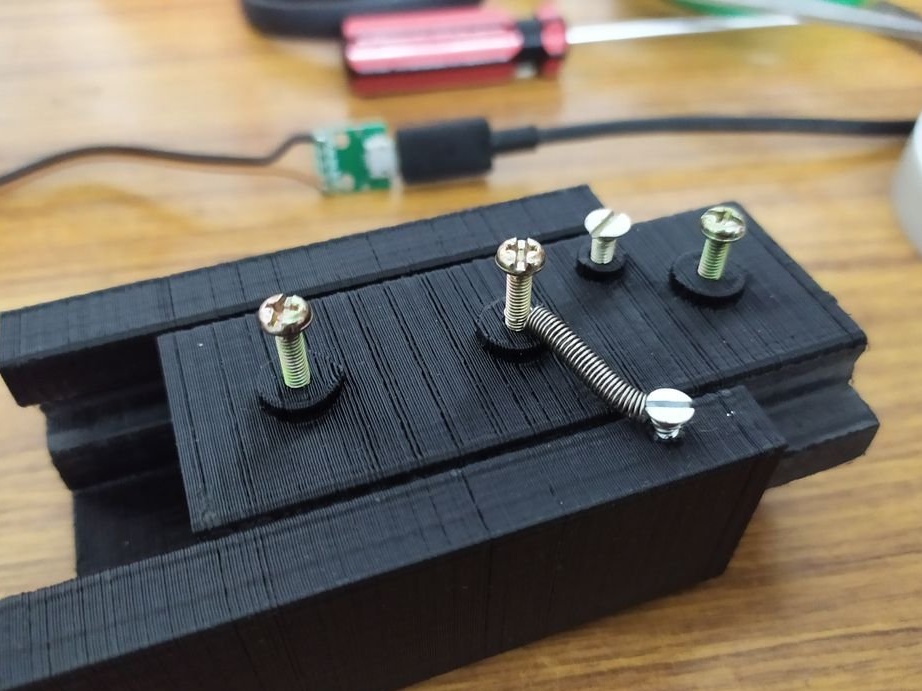
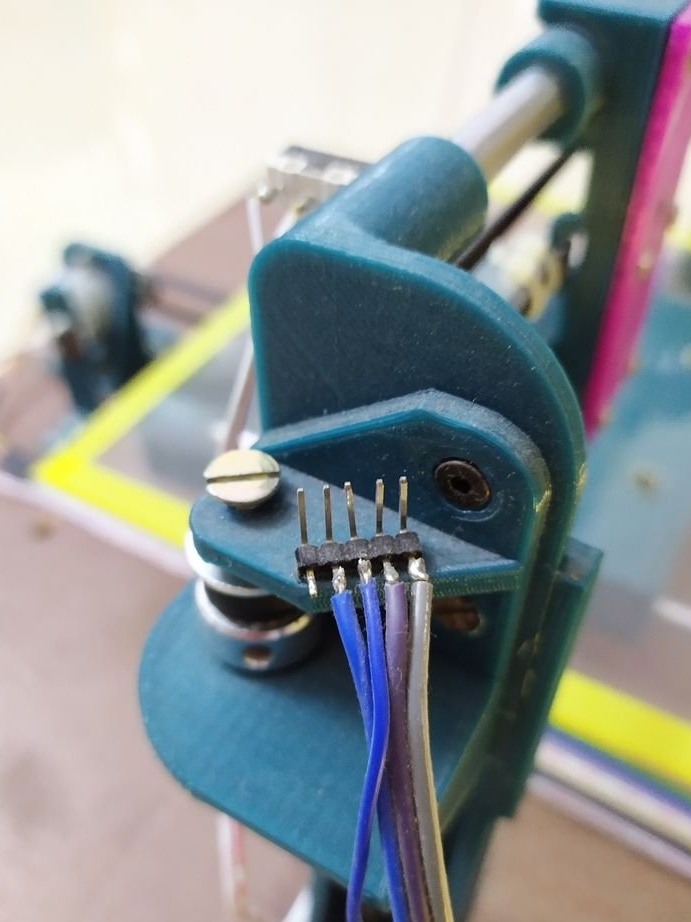
เซอร์โวมอเตอร์ขั้วและ Arduino sticks ดังแสดงในภาพ
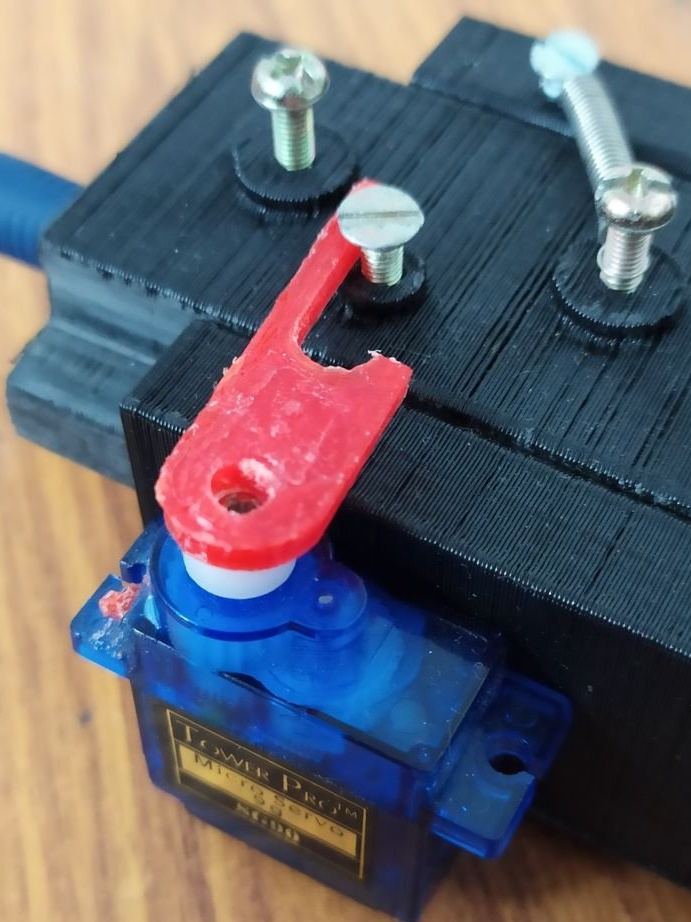
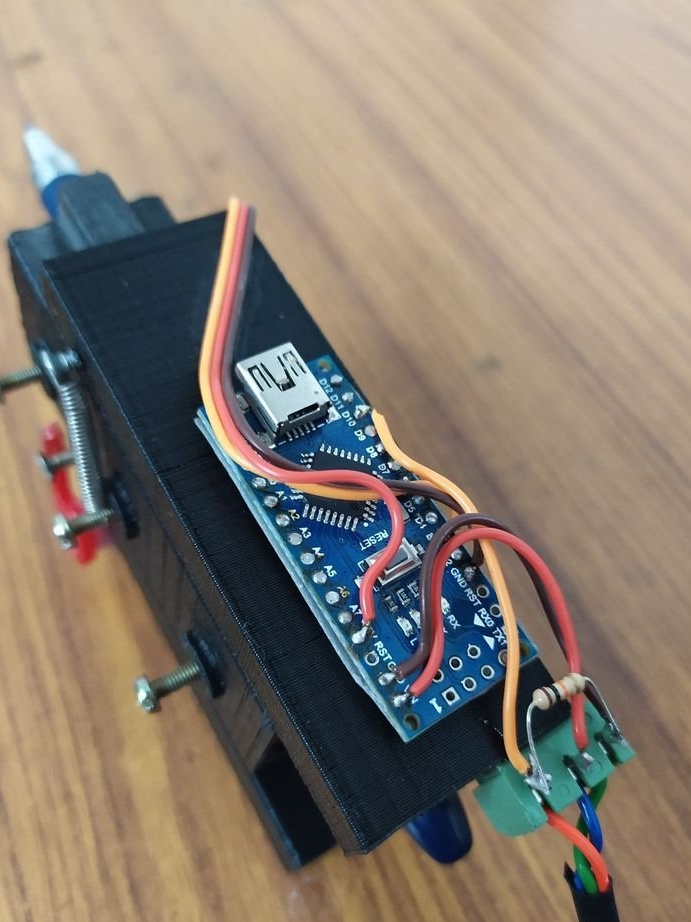
ที่นี่ Arduino นาโนจะใช้ในการแปลงสัญญาณควบคุมเลเซอร์เป็นสัญญาณ PWM ที่สามารถขับ micromotor
มีการเชื่อมต่อดังนี้:
+5 โวลต์ - Vin
-5 โวลต์ - GND
สัญญาณ - D10
Servo power + ve - 5V
Servo power -ve - GND
สัญญาณเซอร์โว - D3
จากนั้นโหลดรหัส
#include Servo myservo;
การตั้งค่าเป็นโมฆะ ()
{
myservo.attach (3);
pinMode [10, INPUT];
}
เป็นโมฆะห่วง ()
{
ถ้า (digitalRead (10) == สูง)
{
myservo.write (20);
}
อื่น
{
myservo.write (60);
}
}
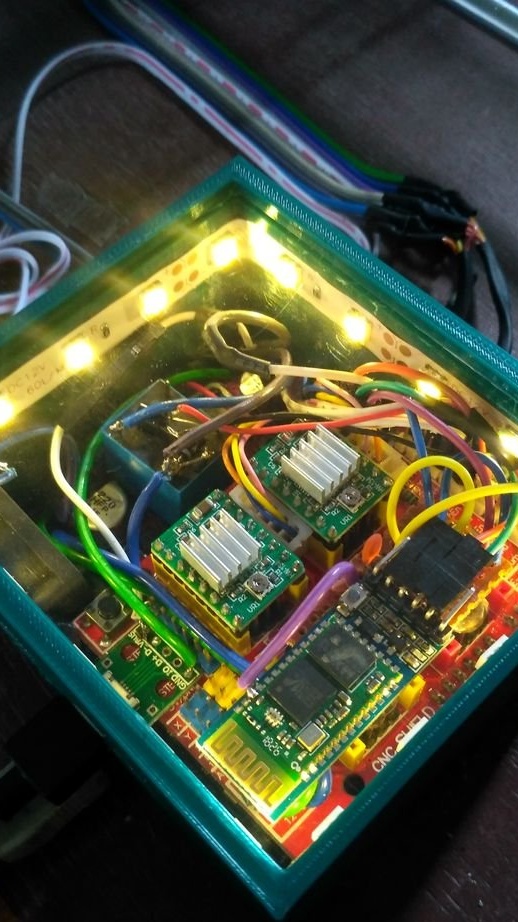
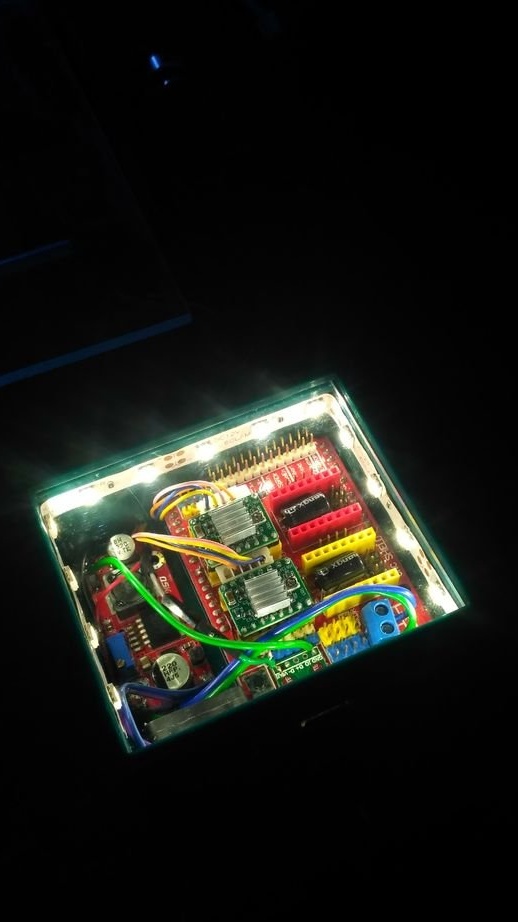
ขั้นตอนที่สิบสอง: การติดตั้ง
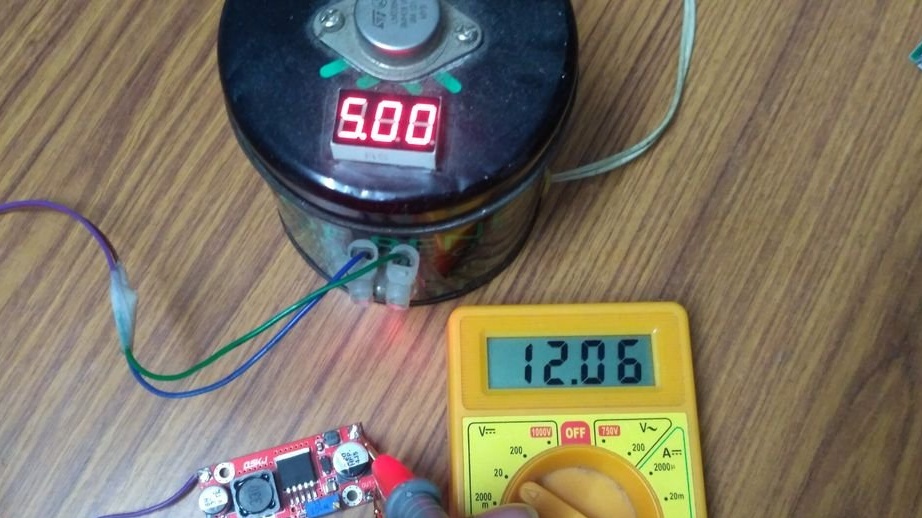
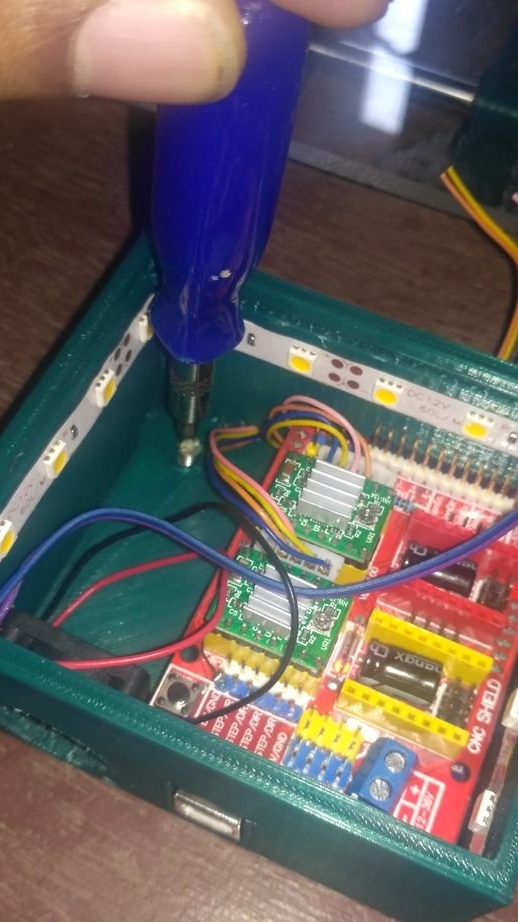
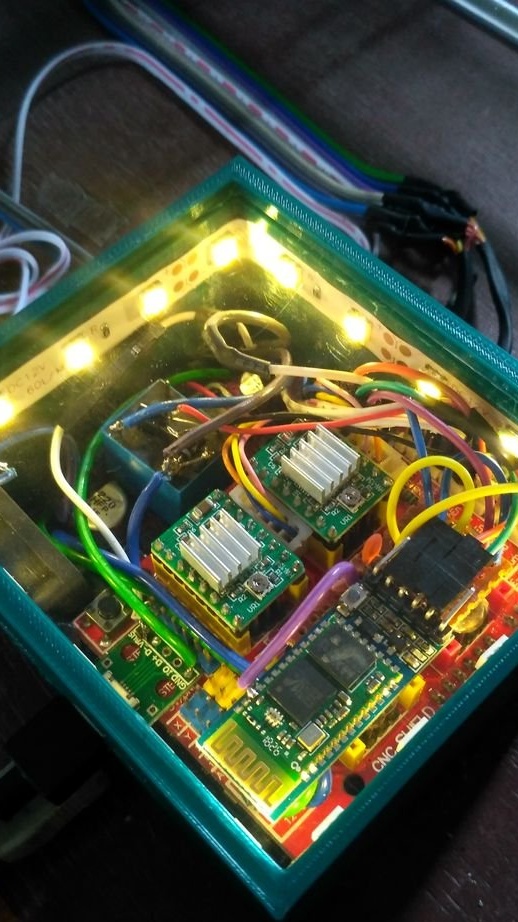
ติดตั้งตามแบบแผน
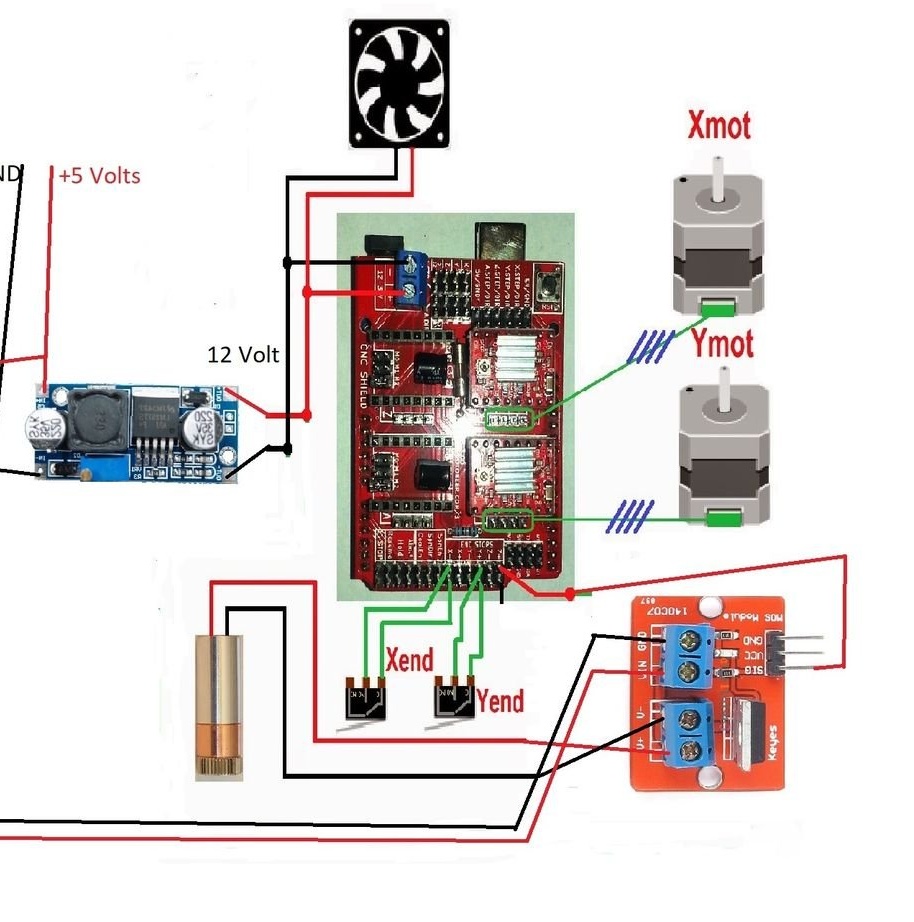
บูสเตอร์แปลงถูกตั้งค่าเป็น 12V
ติดตั้ง Arduino ในโมดูลส่วนขยาย CNC
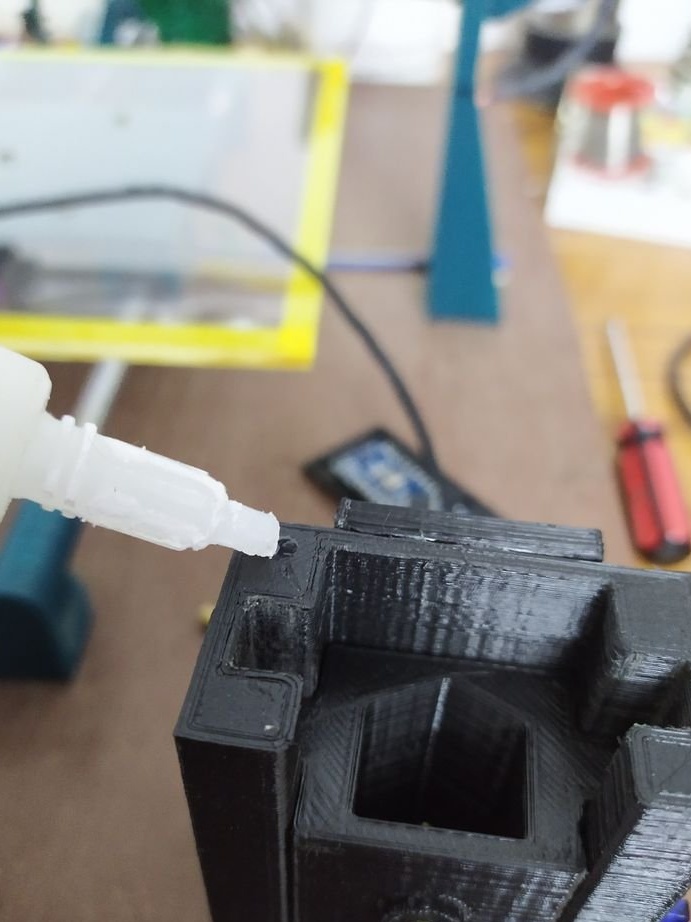
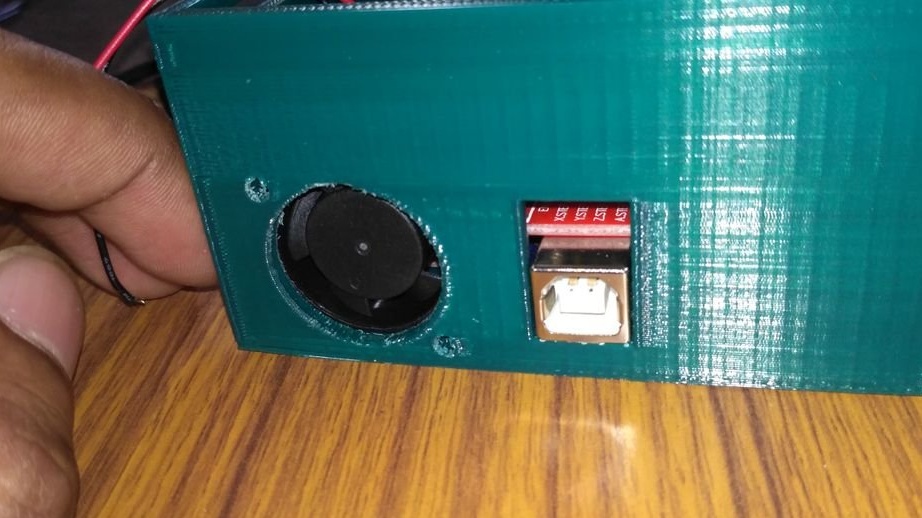
พัดลมติดกาวที่รูที่เตรียมไว้ด้วยกาวร้อนละลาย
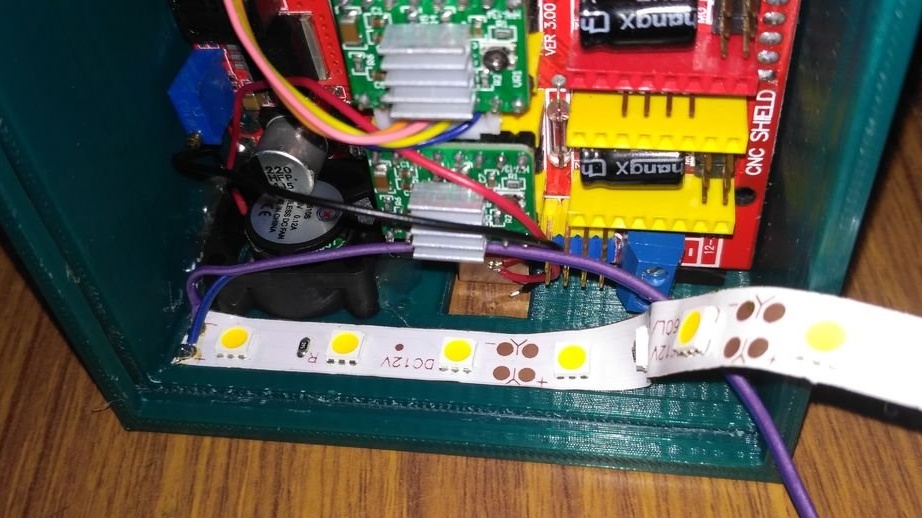
แถบไฟ LED ได้รับการเพิ่มทั้งลักษณะที่ปรากฏและตัวบ่งชี้พลังงาน
กรณีที่พิมพ์ถูกเมากับไม้อัด
แผ่นอะคริลิคใสแผ่นหนา 87 x 75 มม. 2 มม. ใช้เป็นฝาครอบตัวกล้อง สามารถแทรกผ่านร่องที่มีให้ที่ด้านหนึ่งของตัวเรือน
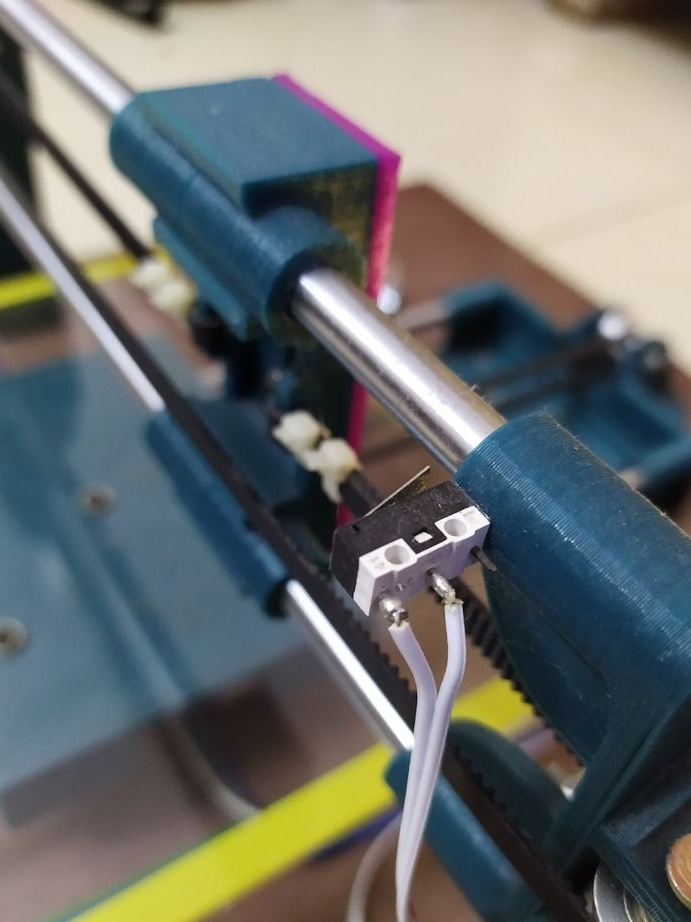
สวิทช์ จำกัด จะถูกติดตั้งเพื่อให้ปุ่มถูกกด 3 มม. ก่อนที่ตลับลูกปืนของแคร่ตลับหมึกแต่ละอันจะชนกับตัวยึดเกาะยึด
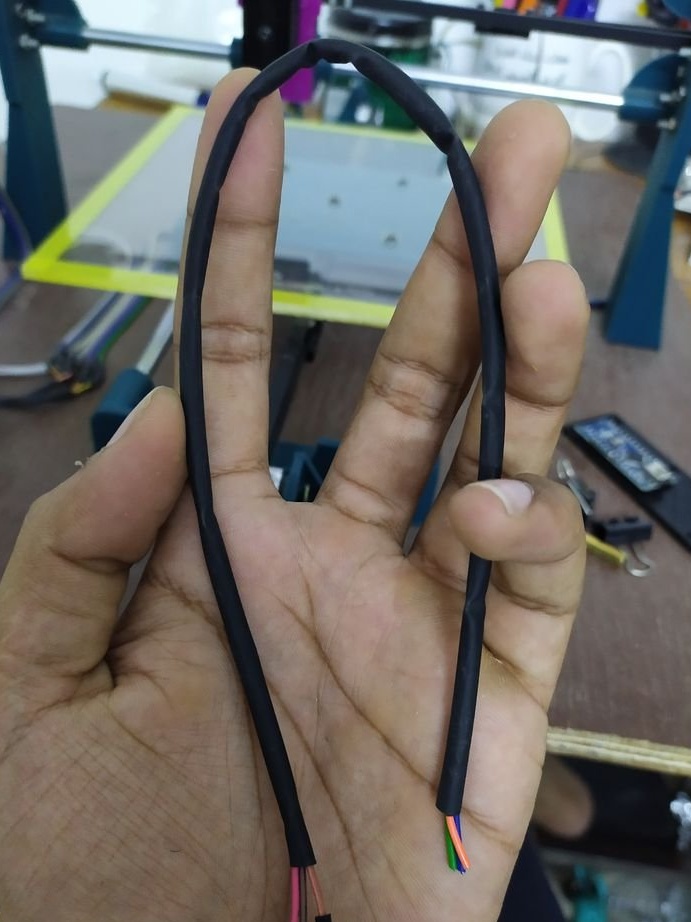
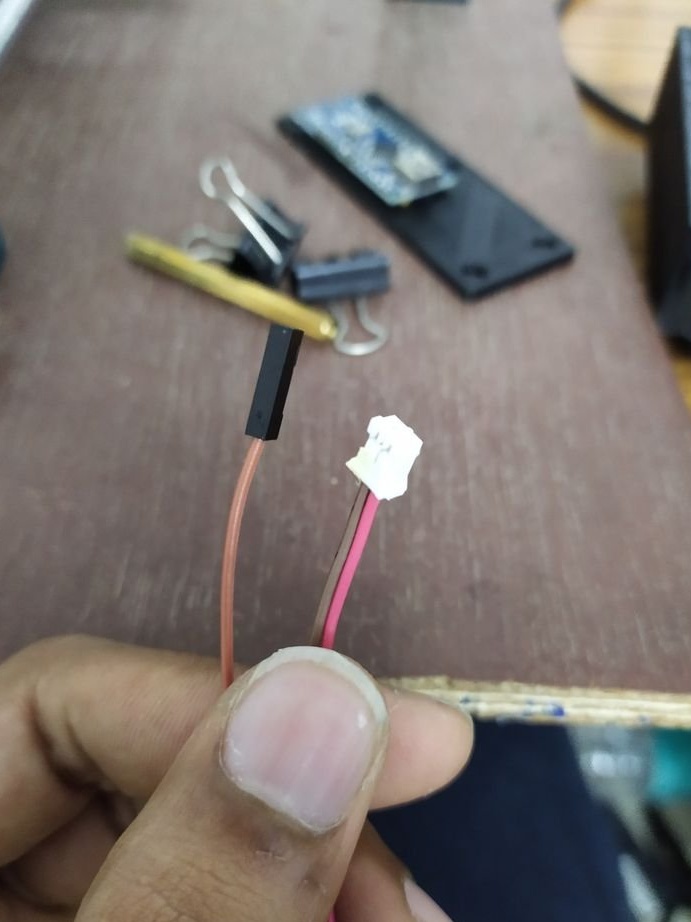
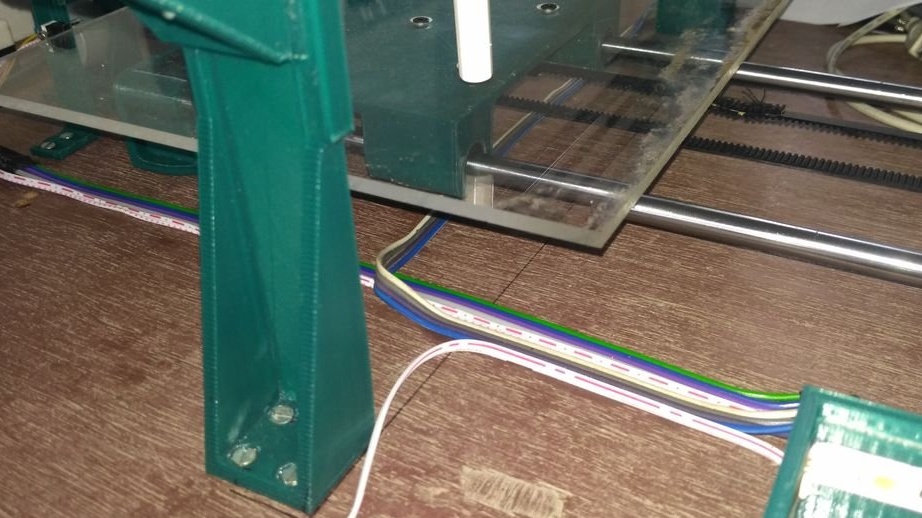
สายไฟสำหรับมอเตอร์และสวิตช์ จำกัด มีความยาวและการเชื่อมต่อมีฉนวน

สายไฟถูกยึดติดกับฐานไม้อัดด้วย superglue
ที่นี่ตัวเพิ่มบูสเตอร์จะใช้เพื่อขับเคลื่อนชิปขับมอเตอร์ A4988 เท่านั้น มอเตอร์แต่ละตัวใช้กระแสไฟเพียง 150 mA
ขั้นตอนที่สิบสาม: โมดูลบลูทู ธ
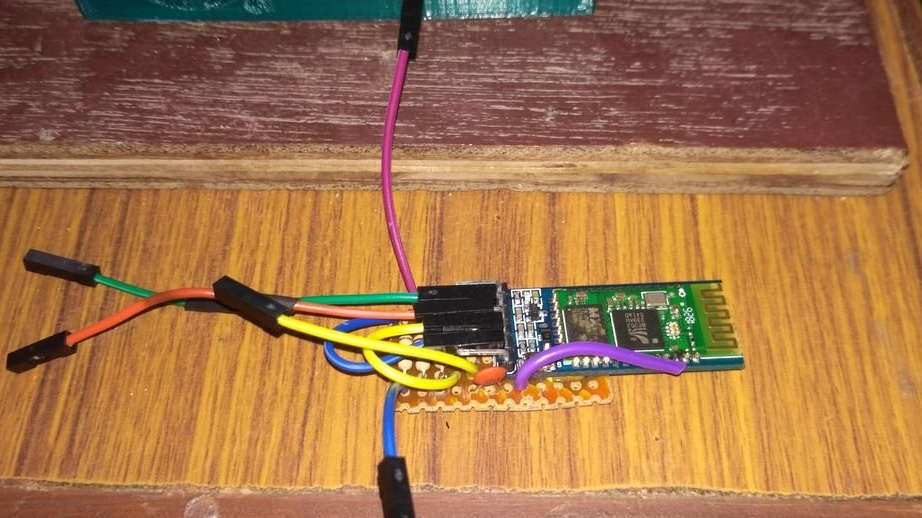
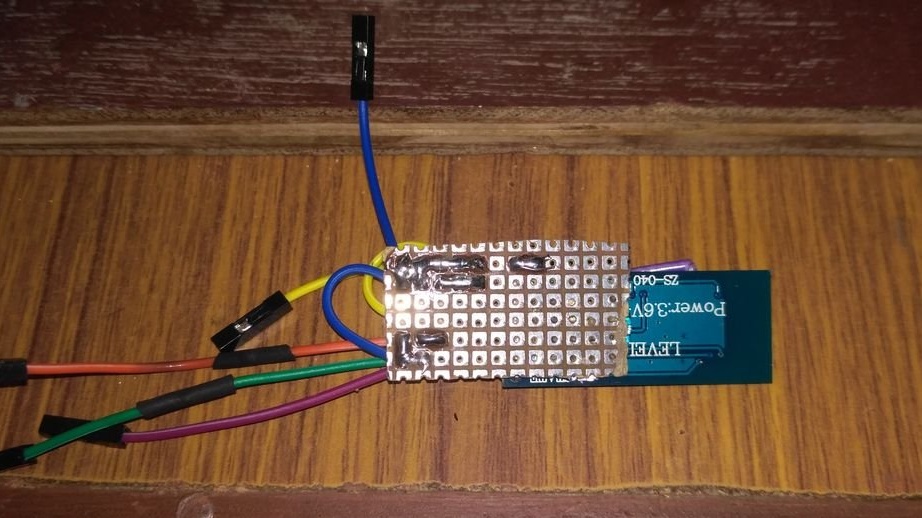
เมาท์โมดูลบลูทู ธ
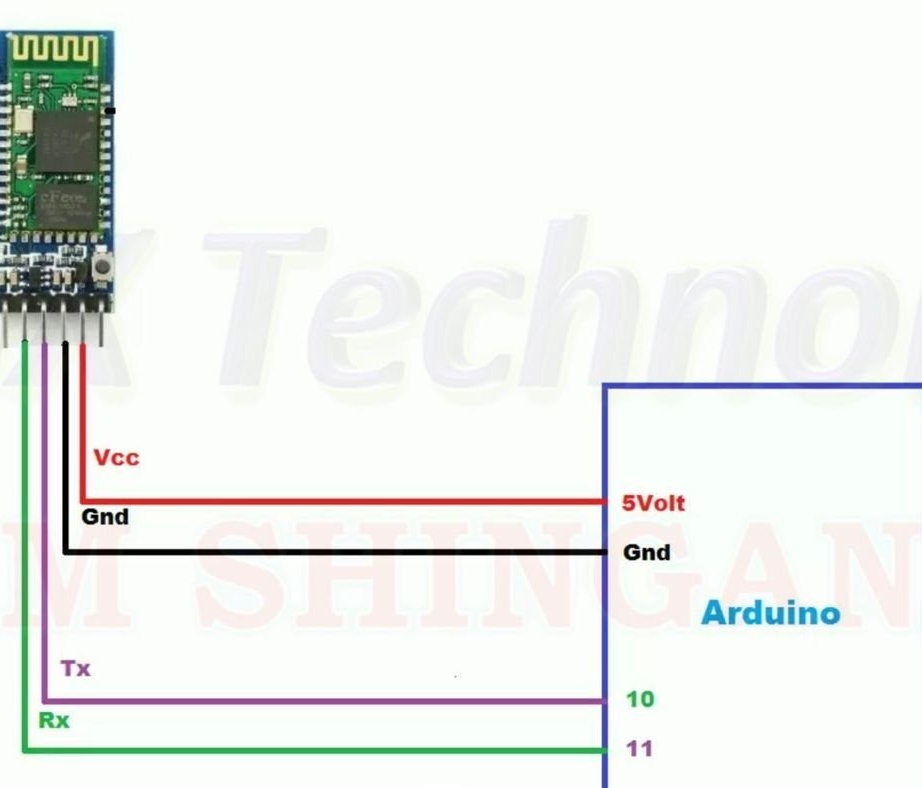
ในการส่งและรับข้อมูลหรือในกรณีนี้ G-codes ผ่านโมดูล HC05 Bluetooth คุณต้องกำหนดค่าโมดูลก่อน
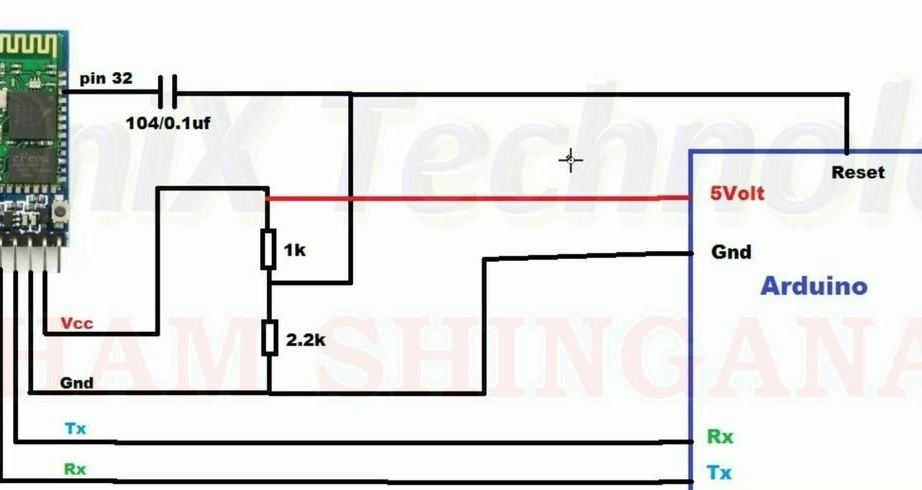
เชื่อมต่อโมดูล HC05 เข้ากับ Arduino Uno ดังแสดงในรูปแรก
ดาวน์โหลดรหัสที่แนบมากับขั้นตอนนี้เพื่อ Arduino
BLUE_P.ino
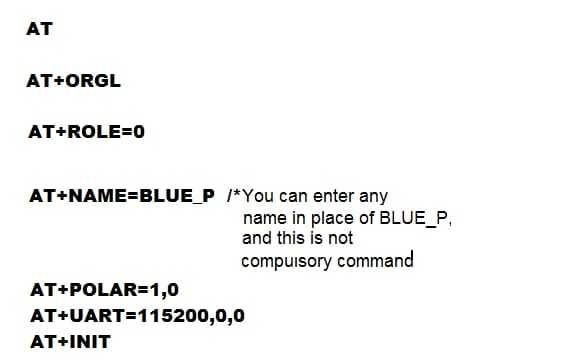
ตอนนี้ป้อนรหัสที่แสดงในภาพที่สอง
หลังจากเสร็จสิ้นการตั้งค่าให้ยกเลิกการเชื่อมต่อโมดูล HC05 จาก Arduino ที่คุณใช้สำหรับการเขียนโปรแกรมและเชื่อมต่อกับ Arduino CNC Shield ตามแผนภาพวงจรในรูปภาพที่ 3


ขั้นตอนที่สิบสี่: รหัสและการตั้งค่า
สำหรับช่างแกะสลักเลเซอร์ต้นแบบจะดาวน์โหลดรหัส
GRBL.zip
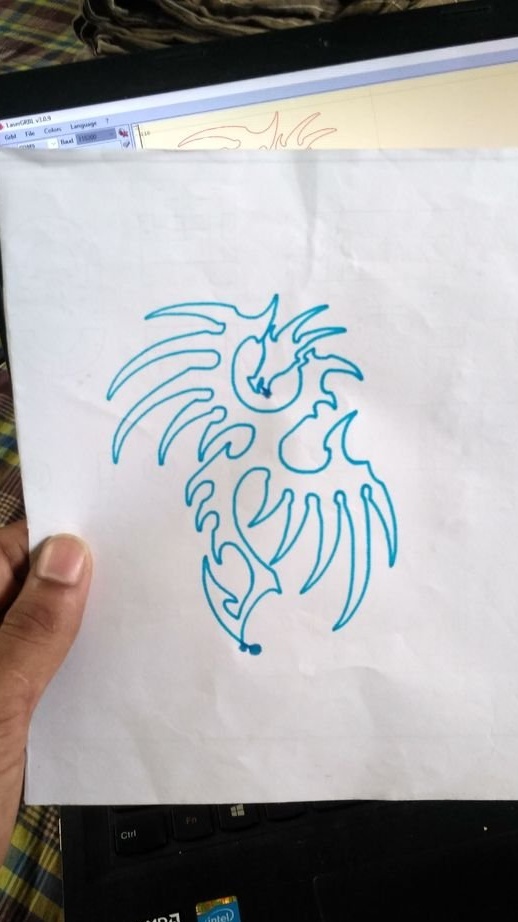
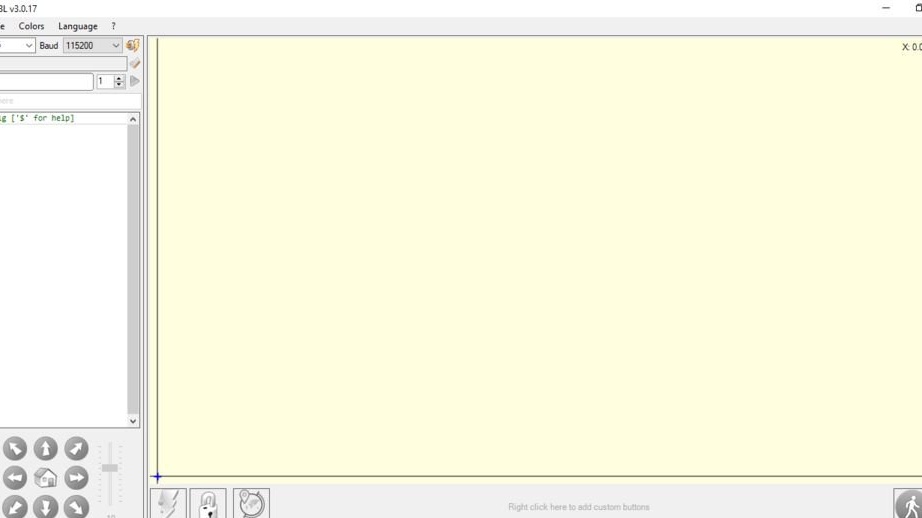
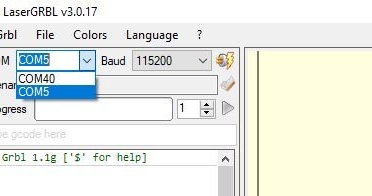
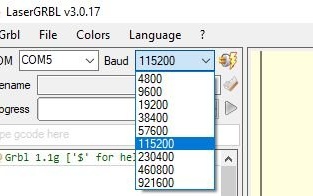
Laser GRBL เป็นหนึ่งในสตรีม G-code ฟรีที่ดีที่สุดสำหรับช่างแกะสลักเลเซอร์ มันสามารถถ่ายโอนรหัส G ไปยัง Arduino ผ่านพอร์ตส้มได้โดยตรง มันมีเครื่องมือในตัวในการแปลงภาพเป็นรหัส G
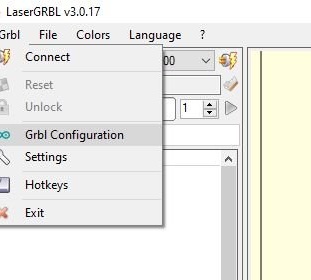
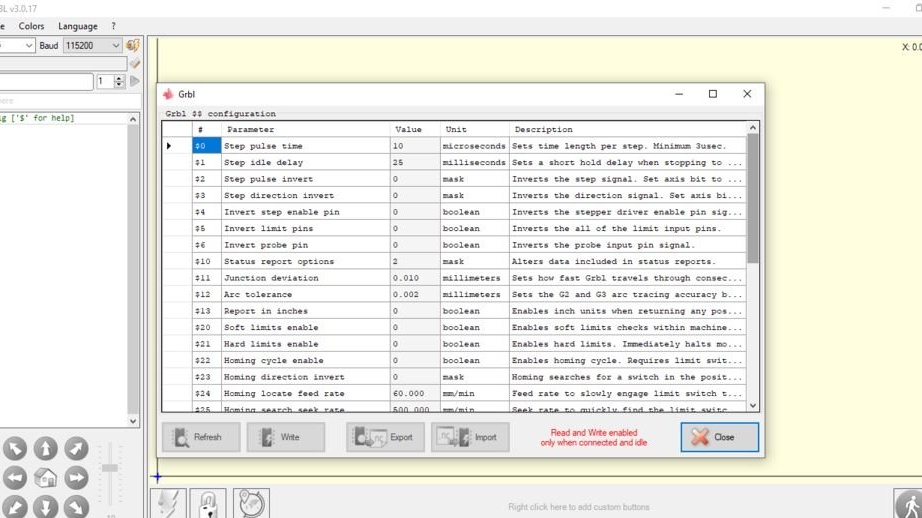
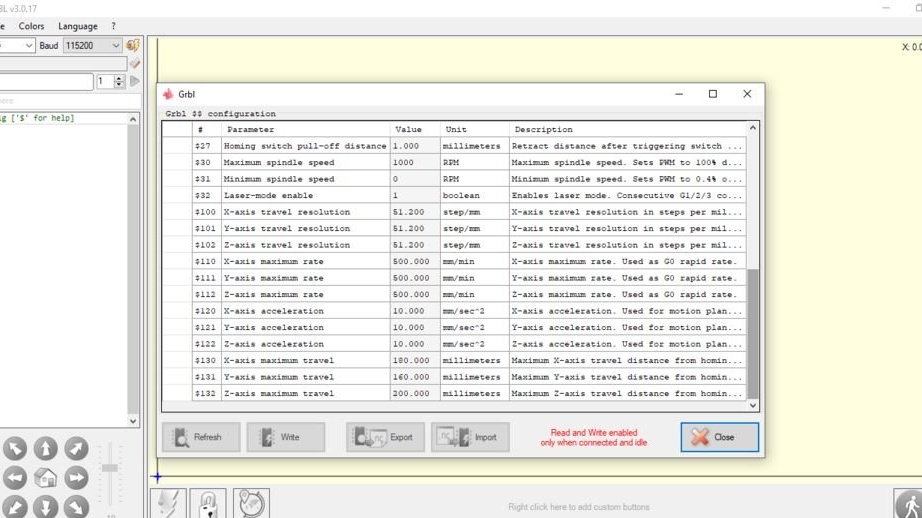
การตั้งค่าทั้งหมดจะต้องทำในรูปถ่ายโดยคำนึงถึงสิ่งต่อไปนี้:
ติดตั้งพอร์ตปลาดุกที่ช่างแกะสลักเลเซอร์ของคุณเชื่อมต่ออยู่
ค่าการกำหนดค่าสามารถเปลี่ยนแปลงได้เพื่อให้เหมาะกับช่างแกะสลักของคุณมากที่สุด
ขั้นตอนที่สิบห้า: การทดสอบ
หลังจากเชื่อมต่อเลเซอร์แล้วก็ถึงเวลาที่ต้องตรวจสอบความแม่นยำ
มีบางสิ่งที่ต้องตรวจสอบ:
แกน X และ Y เคลื่อนที่ไปในทิศทางที่ถูกต้องหรือไม่?
การกลับบ้านทำงานอย่างถูกต้องหรือไม่?
เครื่องยนต์ข้ามขั้นตอนเนื่องจากแรงเสียดทานสูงหรือสายพานแน่นเกินไปหรือไม่
ขนาดของภาพที่พิมพ์ออกมานั้นสอดคล้องกับขนาดที่ระบุในซอฟต์แวร์หรือไม่ จำนวนขั้นตอนต่อมม. สอดคล้องกับสเต็ปเปอร์มอเตอร์ที่ใช้หรือไม่
สามารถปรับความตึงของสายพานได้โดยใช้ตัวปรับแรงตึง หมุนสลักเกลียวจนได้ความตึงที่ถูกต้อง
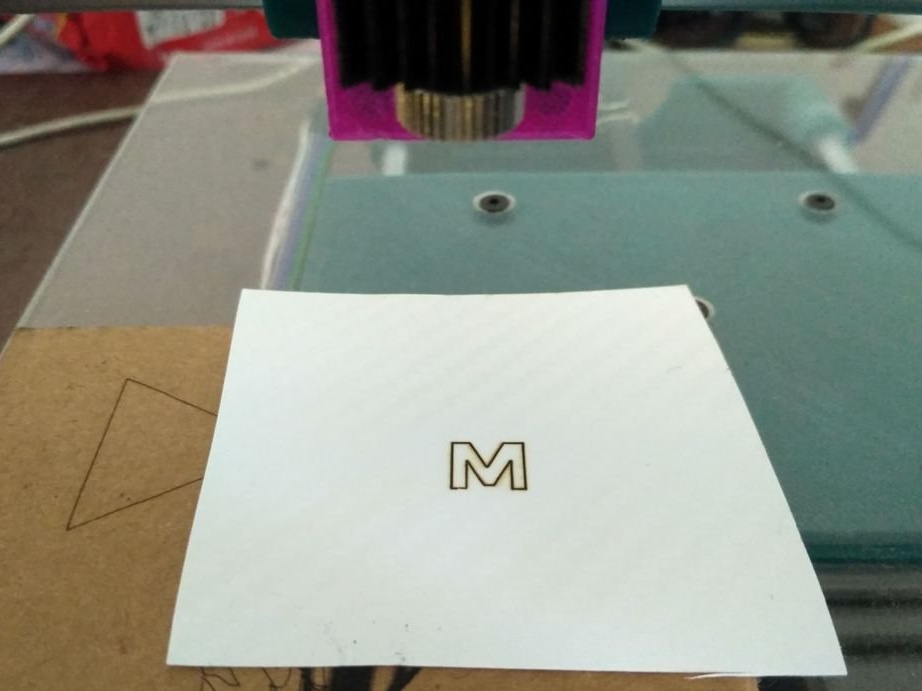
ในการตรวจสอบว่าเครื่องยนต์มีขั้นตอนและขนาดที่ถูกต้องหรือไม่ให้แสดงรูปทรงเรขาคณิตแบบต่อเนื่องอย่างง่ายเช่นสี่เหลี่ยมจตุรัสหรือวงกลม หากเลเซอร์เริ่มจากจุดหนึ่งและหยุดนิ่งที่จุดเดียวกันนั่นหมายความว่าเลเซอร์ของคุณไม่พลาดขั้นตอนเดียวและทำงานได้อย่างสมบูรณ์แบบ หลังจากพิมพ์รูปสามเหลี่ยมหรือสี่เหลี่ยมให้วัดขนาดด้วยตนเองด้วยไม้บรรทัดแล้วดูว่าตรงกับขนาดที่คุณระบุหรือไม่

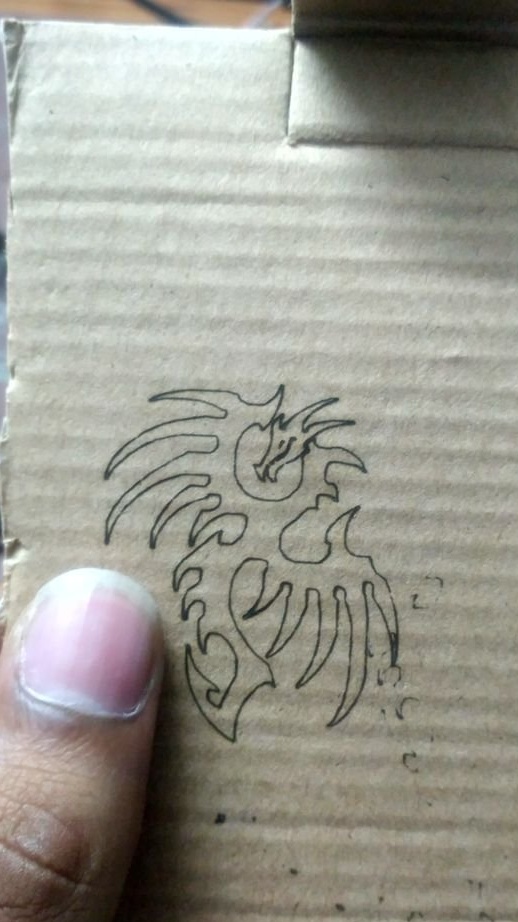
ตามหลักเขาพอใจอย่างสมบูรณ์กับเครื่อง
สามารถแกะสลักบนวัสดุต่าง ๆ เช่นไม้กระดาษแข็งหนังพลาสติก ฯลฯ
เนื่องจากเครื่องยนต์มีขั้นตอนประมาณ 102 ขั้นต่อมม. จึงสามารถทำการแกะสลักขนาดเล็กที่มีรายละเอียดละเอียดได้
ช่างแกะสลักทำงานได้โดยไม่มีปัญหากับแหล่งจ่ายไฟ USB