

Vibrobots เป็นอย่างนั้น หุ่นยนต์การเคลื่อนไหวนั้นเกิดจากการสั่นสะเทือน แม้จะมีความจริงที่ว่าการออกแบบของพวกเขาค่อนข้างเรียบง่าย แต่พวกเขาก็ไม่ประทับใจในการทำงานมากกว่าพี่น้องที่ซับซ้อนทางเทคนิค หุ่นยนต์ดังกล่าวจะใช้ขนแปรงเป็นผู้เสนอญัตติซึ่งเป็นขาชนิดหนึ่ง
หุ่นยนต์ที่อธิบายไว้ในบทความสามารถเปลี่ยนวิถีการเคลื่อนที่ได้อย่างอิสระและหลีกเลี่ยงอุปสรรค ผู้เขียนได้สร้างหุ่นยนต์สองตัวซึ่งติดตั้งแหล่งพลังงานและเครื่องยนต์ต่างกัน โดยหลักการแล้วไม่มีมาตรฐานที่เข้มงวดเกี่ยวกับวัสดุที่ใช้สิ่งสำคัญคือการยึดตามรูปแบบที่กำหนดเมื่อประกอบหุ่นยนต์

วัสดุและเครื่องมือสำหรับการผลิต:
- เนคไทไนล่อนขนาด 3x150 มม.
- เทปฉนวนสีดำ
- แบตเตอรี่ 9 โวลต์ (6F22);
- ดิสก์เลเซอร์ (ซีดีหรือดีวีดีไม่ต่าง)
- ปลอกป้องกัน
- ขั้วต่อแบตเตอรี่ 9 โวลท์;
- ผิดปกติ (ลบ)

กระบวนการผลิตของหุ่นยนต์:
ขั้นตอนแรก สร้างพื้นฐานของหุ่นยนต์
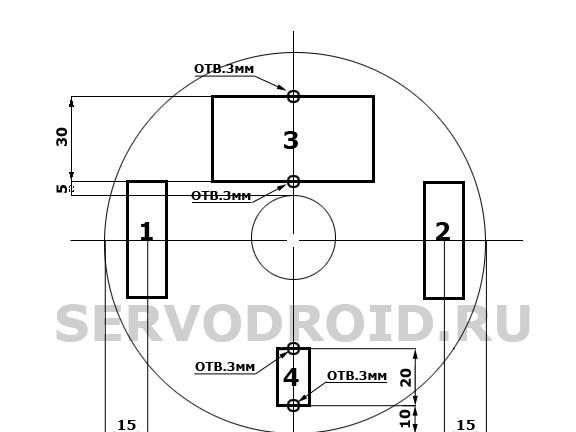
เป็นพื้นฐานสำหรับหุ่นยนต์จะใช้แผ่นซีดีหรือดีวีดีปกติ ทำให้รูในนั้นชัดเจนตามรูปแบบซึ่งแสดงไว้ในภาพถ่าย ไม่มีการยกเว้นหลุมทั้งหมดจะถูกเจาะด้วยสว่านขนาด 3 มม. เส้นผ่านศูนย์กลางนี้ค่อนข้างเพียงพอเมื่อใช้สำหรับผูกไนล่อน หากคุณตัดสินใจที่จะใช้วิธีการยึดที่แตกต่างออกไปคุณสามารถเจาะรูไปยังขนาดอื่นได้ ภาพวาดที่เสนอนั้นเหมาะสำหรับการประกอบหุ่นยนต์ใด ๆ
หมายเลข 1 และ 2 ระบุตำแหน่งการติดตั้งของแปรงติดตั้งแบตเตอรี่ในรูปสี่เหลี่ยมจัตุรัสที่มีหมายเลข 3 และติดตั้งมอเตอร์ไว้ในช่องสี่เหลี่ยม 4
ขั้นตอนที่สอง เราทำและติดตั้งตัวย้าย
ด้วยแรงขับทำให้หุ่นยนต์เคลื่อนที่ได้ ในการทำให้คุณต้องใช้แปรงสีฟันสองอัน ทางที่ดีที่สุดคือแปรงจะมีความสูงและรูปร่างเหมือนกัน หากรูปร่างแตกต่างกันก็สามารถแก้ไขได้ด้วยกรรไกร
ตอนนี้ขนแปรงจำเป็นต้องกำหนดทิศทาง สำหรับเรื่องนี้จะใช้เทปกาวและขนแปรงจะถูกห่อในลักษณะเดียวกับที่ระบุในภาพถ่าย ในตำแหน่งนี้แปรงควรจัดขึ้นประมาณหนึ่งชั่วโมงเพื่อให้ขนแปรงจำตำแหน่งนี้ได้ ในภาพถ่ายลูกศรสีเทาแสดงถึงทิศทางที่เอียงขนแปรง

หลังจากตั้งค่ารูปร่างที่ต้องการแล้วคุณจะต้องตัดส่วนที่มีขนแปรงออกจากแปรงสีฟัน จากนั้นคุณจะต้องใช้ปืนกาวและติดตั้งขนแปรงบนดิสก์ในสถานที่ที่ระบุ งานทั้งหมดจะต้องดำเนินการอย่างรวดเร็วและแม่นยำเนื่องจากกาวร้อนจะเย็นตัวลงอย่างรวดเร็วและแข็งตัวคุณต้องพยายามติดตั้งแปรงเพื่อให้มันยืนขนานกัน
แปรงขนแปรงควรชี้กลับไปที่แบตเตอรี่ที่ระดับ 9 โวลต์ ในระหว่างการใช้งานหุ่นยนต์จะเคลื่อนที่ไปตามทิศทางของขนแปรงนั่นคือตำแหน่งแบตเตอรี่จะอยู่ด้านหลังของหุ่นยนต์

1 - ดิสก์, 2 - กาวร้อนละลาย, 3 - รูสำหรับติดตั้งเครื่องยนต์, 4 - รูสำหรับติดตั้งแบตเตอรี่ ลูกศรสีขาวแสดงถึงทิศทางของขนแปรง
ขั้นตอนที่สาม ทำตัวประหลาด
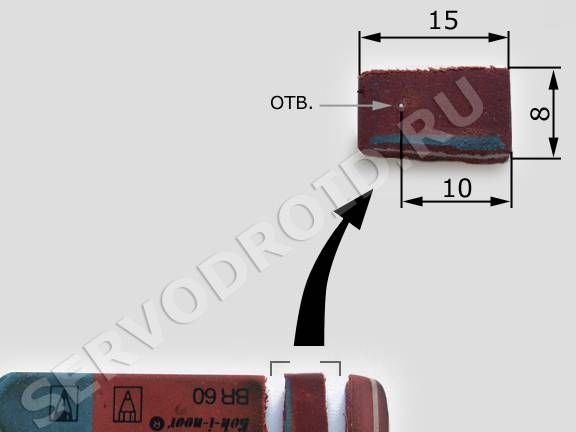
ในการรับการสั่นสะเทือนต้องวางวัตถุประหลาดที่ไม่สมดุลเช่นไว้บนเพลามอเตอร์ ผู้เขียนทำสิ่งแปลกประหลาดของยางลบโดยตัดชิ้นส่วนที่มีขนาดเหมาะสม ทำหลุมในสถานที่ที่ระบุโดยลูกศรสีขาว ไม่ควรมีขนาดใหญ่เนื่องจากความผิดปกติจะเลื่อนออกจากเพลามอเตอร์ มันสามารถทำด้วยเข็ม
ขั้นตอนที่สี่ ผลิตฝาครอบป้องกัน
เนื่องจากมีการสร้างการสั่นสะเทือนโดยยางลบหมุนเพื่อให้หุ่นยนต์ทำงานจึงแนะนำให้ปกป้องสถานที่นี้จากวัตถุต่าง ๆ นอกจากนี้การป้องกันเช่นนี้จะทำให้หุ่นยนต์ดูน่าสนใจยิ่งขึ้น ฝาครอบป้องกันทำจากกระดาษซึ่งประกอบด้วยหลายชั้น คุณต้องทำให้กระดาษเป็นทรงกระบอกขนาดมันขึ้นอยู่กับขนาดของเครื่องยนต์ เพื่อเพิ่มความแข็งแกร่งให้กับกระดาษมากขึ้นสามารถทาด้วยกาวได้ดังนั้นใช้สองสามชั้นเพิ่มเติม หรือคุณสามารถใช้กระดาษแข็งเพื่อวัตถุประสงค์เหล่านี้
เพื่อสร้างรูปทรงกระบอกมอเตอร์จะถูกห่อด้วยกระดาษที่ด้านบน




ขั้นตอนที่ห้า การประกอบขั้นสุดท้ายของหุ่นยนต์
เครื่องยนต์ได้รับการติดตั้งในสถานที่เฉพาะและติดตั้งด้วยการพูดนานน่าเบื่อไนลอน การเลือกรายละเอียดดังกล่าวสามารถหาซื้อได้ตามร้านค้าที่เชี่ยวชาญด้านการขายวัสดุก่อสร้าง
ใส่แบตเตอรี่อย่างแม่นยำด้วย เป็นเรื่องสำคัญที่จะต้องพิจารณาว่าแบตเตอรี่จะต้องอยู่กึ่งกลางอย่างชัดเจนไม่เช่นนั้นวิถีการเคลื่อนที่ของหุ่นยนต์อาจเปลี่ยนแปลงได้ โดยวิธีนี้ในอนาคตมันเป็นไปได้ที่จะตั้งวิถี ทำที่บ้าน.


ตอนนี้ระหว่างขั้วต่อคลิปและมอเตอร์ที่คุณต้องติดตั้งสวิตช์ขนาดเล็ก สรุปแล้วมันยังคงเชื่อมต่อตัวเชื่อมต่อคลิปเข้ากับแบตเตอรี่และคุณสามารถเริ่มทดสอบหุ่นยนต์ได้ สายไฟเชื่อมต่อกันด้วยสี
อย่างไรก็ตามเมื่อใช้แบตเตอรี่ Kron คุณไม่จำเป็นต้องติดตั้งสวิตช์คุณสามารถเปิดหุ่นยนต์โดยเชื่อมต่อตัวเชื่อมต่อ
สำหรับหุ่นยนต์รุ่นที่สองคุณสามารถถอดแบตเตอรี่ออกจากอุปกรณ์ได้ แต่แน่นอนว่าสวิตช์มีแนวโน้มมากขึ้น
นั่นคือทั้งหมดที่หุ่นยนต์พร้อมคุณสามารถเริ่มต้นการทดสอบ เพื่อให้ได้ผลลัพธ์ตามที่ต้องการคุณสามารถลองเปลี่ยนขั้วดังนั้นมอเตอร์จะหมุนไปในทิศทางตรงกันข้ามและหุ่นยนต์จะทำงานต่างกัน