

เช่น หุ่นยนต์ ถูกสร้างขึ้นแล้วและได้ชื่อว่า DIY: LightBot นอกจากนี้ทุกคนสามารถรวบรวมได้องค์ประกอบทั้งหมดสำหรับการสร้างสามารถพบได้ง่ายและหุ่นยนต์จะรวมตัวกันได้ค่อนข้างง่าย หุ่นยนต์ประเภทนี้จะติดตามเจ้าของในที่มืดตลอดเวลาและไฮไลต์อยู่ในตำแหน่งที่เหมาะสมซึ่งไม่จำเป็นต้องถือไฟฉายไว้ในมือ หุ่นยนต์จะถูกตรวจสอบโดยเจ้าของด้วยเซ็นเซอร์อินฟราเรดที่ติดกับเท้าของเจ้าของ
วัสดุและเครื่องมือสำหรับการสร้างหุ่นยนต์:
1. สัญญาณอินฟราเรด อุปกรณ์ดังกล่าวจะประกอบด้วยไฟ LED อินฟราเรดสี่ดวงซึ่งสามารถพบได้ในรีโมทคอนโทรลจากทีวี
2. สองล้อจากชุดของ K'nex หรือของเล่นเด็ก
3. มอเตอร์ขนาดเล็กสองตัว (สามารถพบได้ในของเล่นเด็ก)
4. ทรานซิสเตอร์อินฟราเรดสองตัวเช่น NPN หรือ photoresistor โฟโตอิเล็กทริกอินฟราเรดที่หาซื้อได้ยาก
5. แบตเตอรี่ขนาด AA สามก้อนและหนึ่งก้อนขนาด 9 โวลต์
6. ท่อพีวีซี
7. กาวร้อนละลาย
8. ส้อมพลาสติกทิ้ง
กระบวนการผลิตของหุ่นยนต์:
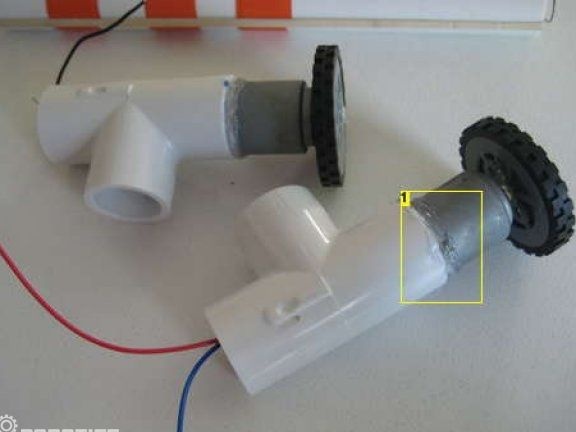
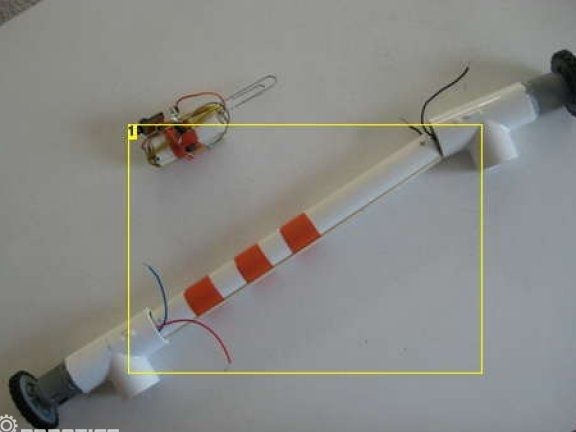
ขั้นตอนแรก การติดตั้งเครื่องยนต์
ก่อนอื่นคุณต้องติดตั้งเอนจิ้น สำหรับการติดตั้งของพวกเขาใช้ "tees" พลาสติกซึ่งจะถูกวางบนหลอดหลัก เครื่องยนต์ติดด้วยกาวร้อนละลาย ไม่จำเป็นต้องเสียใจกับกาว นอกจากนี้ในระยะนี้ล้อสามารถติดตั้งบนแกนของเครื่องยนต์ เพื่อให้พวกเขายึดมั่นพวกเขายังสามารถแก้ไขด้วยกาวร้อนละลาย
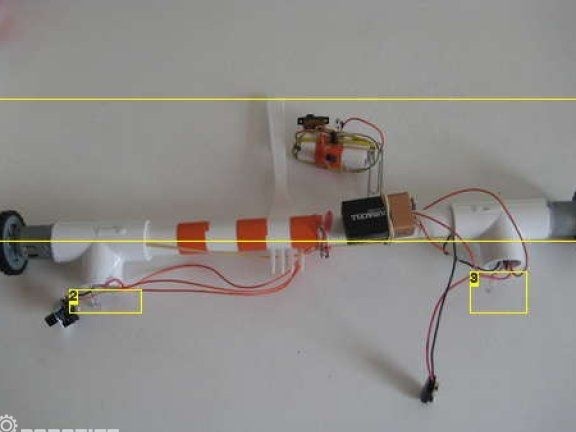
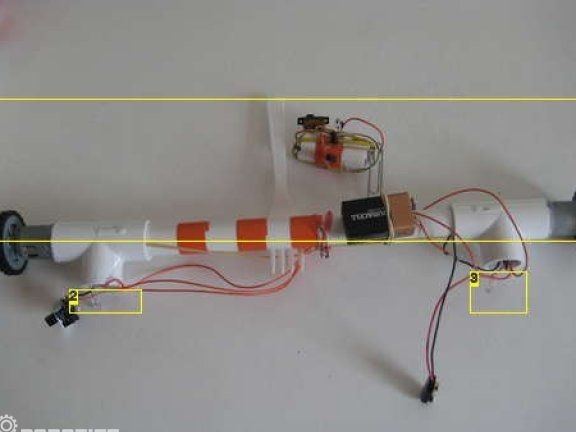
ขั้นตอนที่สอง การติดตั้ง Photoresistor
จำเป็นต้องมีตัวรับแสงเพื่อติดตามสัญญาณอินฟราเรด พวกเขาจะเป็นดวงตาหุ่นยนต์ หุ่นยนต์จะเร่งหนึ่งในเครื่องยนต์ให้หมุนไปในทิศทางที่ถูกต้องทั้งนี้ขึ้นอยู่กับทิศทางของแสงที่จะออกมา
ตัวต้านทานแสงจะติดอยู่กับ "tees" ในสถานที่ที่ระบุโดยหมายเลข 2 และ 3 ในตำแหน่งเหล่านี้พวกเขาสามารถแก้ไขด้วยกาวสามแท่ง
ขั้นตอนที่สาม การติดตั้งพาวเวอร์ซัพพลาย
โดยรวมแล้วหุ่นยนต์ทำงานบนแหล่งพลังงานสองแห่ง เป็นแบตเตอรี่ AA สามก้อนและแบตเตอรี่ขนาด 9 โวลต์ สำหรับแบตเตอรี่แบบนิ้วนั้นจะถูกติดตั้งไว้ภายในหลอดมีแบตเตอรี่ประเภท "Krona" ติดอยู่กับมือถือจากด้านนอก
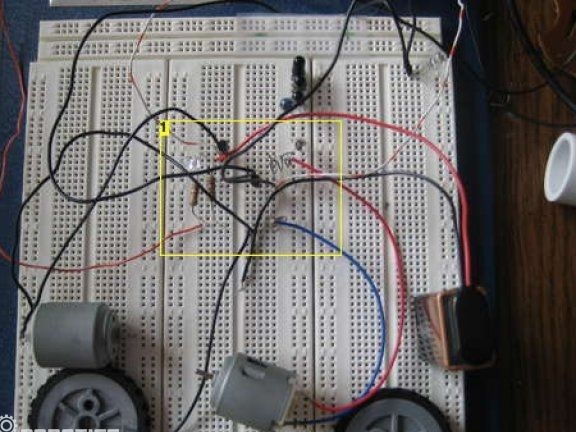
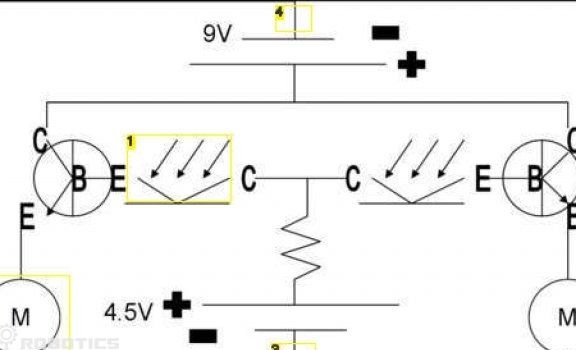
ขั้นตอนที่สี่ วงจรหุ่นยนต์
รูปแบบได้รับการออกแบบในลักษณะที่ว่าถ้าหุ่นยนต์เห็นรังสีในด้านหนึ่งมันจะเร่งเครื่องยนต์จากด้านตรงข้ามดังนั้นหุ่นยนต์จะหมุนไปรอบ ๆ ความเร็วของเครื่องยนต์ที่ต้องการทำได้โดยการเปลี่ยนตัวต้านทาน
วงจรอื่นสามารถเสริมด้วยสวิตช์ จะต้องติดตั้งในลักษณะที่ขัดจังหวะแหล่งจ่ายไฟไปยังหุ่นยนต์
ในแผนภาพหมายเลข 1 หมายถึง phototransistor, 2 - ตัวควบคุมมอเตอร์, 3 - สถานที่สำหรับติดตั้งสวิตช์, 4 - คุณยังสามารถใส่สวิตช์ได้ที่นี่
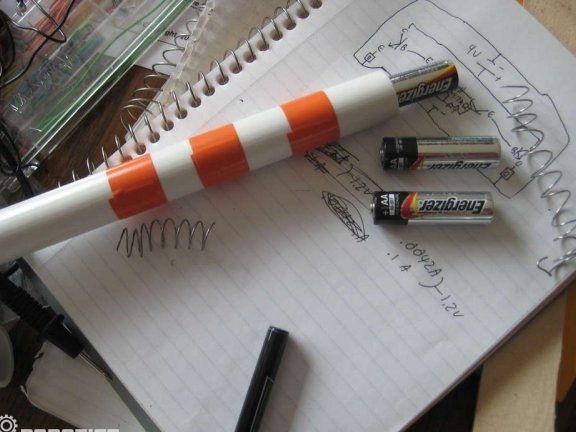
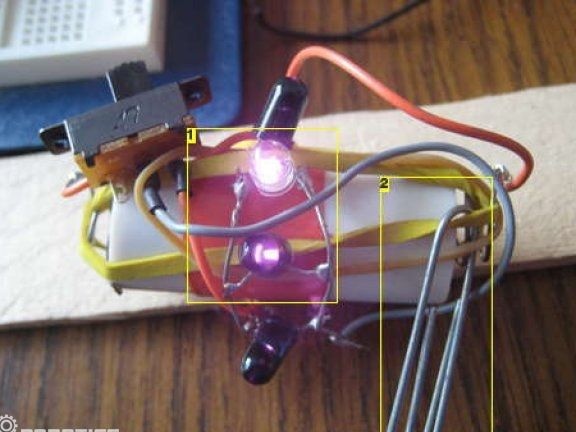
ขั้นตอนที่ห้า สร้าง IR Beacon
ในการสร้างสัญญาณแสงอินฟราเรดจะใช้หลอดโพลีไวนิลคลอไรด์สั้น ๆ ซึ่งติดตั้งแบตเตอรี่ AA หนึ่งก้อน ต้องมีการสัมผัสหน้าสัมผัสด้วยแถบยืดหยุ่นและแหล่งจ่ายไฟไปยังไดโอดอินฟราเรดทั้งสี่จะถูกควบคุมโดยสวิตช์ มันเป็นไปไม่ได้ที่จะเห็นแสงดังกล่าวด้วยตาเพื่อตรวจสอบความสามารถในการทำงานของไดโอดพวกเขาจำเป็นต้องมองผ่านกล้องดิจิตอล สัญญาณถูกผูกด้วยคลิปหนีบกระดาษธรรมดาที่ขา
ขั้นตอนที่หก ขั้นตอนสุดท้ายของการประกอบหุ่นยนต์
ตอนนี้ทุกอย่างจะต้องมีการเชื่อมต่อตามที่ระบุไว้ในแผนภาพ ชิ้นส่วนทางกลต้องประกอบกันด้วยความสนใจหลักควรจะจ่ายให้กับโฟโตอิเล็กทริกพวกเขาจะต้องยื่นออกมามิฉะนั้นพวกเขาจะไม่สามารถรับสัญญาณของสัญญาณได้ ตอนนี้เมื่อเปิดหุ่นยนต์คุณต้องเดินไปรอบ ๆ และดูว่ามันจะทำอะไร
แน่นอนว่าหุ่นยนต์อาจไม่ได้ไปหลังจากเจ้าของเป็นครั้งแรก แต่คุณไม่ควรสิ้นหวังเพราะวงจรสามารถแก้ไขได้และหุ่นยนต์จะถูกกำหนดค่าตามต้องการ ตามที่ผู้เขียนในซอฟต์แวร์ในอนาคตสามารถติดตั้งบนหุ่นยนต์ขอบคุณที่มันจะรับรู้วัตถุและผู้คน คุณสามารถติดตั้งเซ็นเซอร์ต่าง ๆ มากมายและทำให้หุ่นยนต์นี้เป็นอุปกรณ์ที่มีเทคโนโลยีสูง