

Pultoids เรียกว่าโรบอตดังกล่าวที่สามารถควบคุมได้จากระยะไกลโดยใช้รีโมตคอนโทรล ตัวอย่างเช่นอาจใช้รีโมทคอนโทรลของทีวีเพื่อวัตถุประสงค์เหล่านี้ งานหลักที่ผู้แต่งตั้งไว้ในการผลิตหุ่นยนต์นั้นคือความเรียบง่ายของการประกอบ ภายใต้การทบทวน หุ่นยนต์ ไม่ต้องการการผลิตแผงวงจรพิมพ์การติดตั้งนั้นง่ายมากและเพิ่งเกิดขึ้นบนกระดาษแข็ง

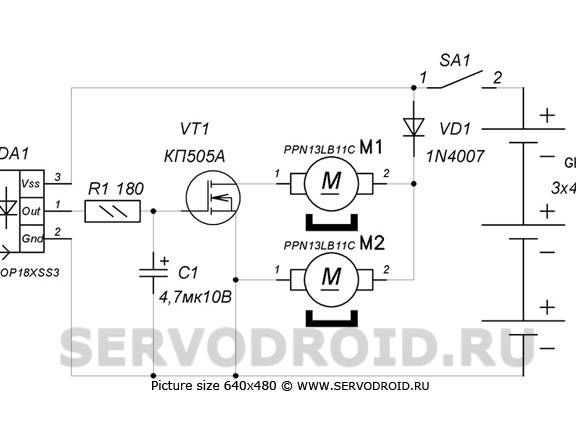
อิเล็กทรอนิกส์ วงจรหุ่นยนต์ประกอบด้วยเพียงสี่องค์ประกอบ: ไดโอดทรานซิสเตอร์เครื่องตรวจจับแสงและตัวเก็บประจุ สำหรับการผลิตชิ้นส่วนทางกลจำเป็นต้องใช้วัสดุขั้นต่ำเช่น CD-ROM เพื่อทำเคส
หุ่นยนต์ที่สร้างด้วยวิธีนี้จะเข้าใจเพียงหนึ่งทีมเท่านั้น มันมีค่ากดปุ่มใด ๆ บนแผงควบคุมและหุ่นยนต์จะเริ่มเปิด หากคุณกดปุ่มค้างไว้มุมการหมุนจะยิ่งใหญ่ขึ้นทำให้หุ่นยนต์สามารถหมุนได้ 360 องศา
อุปกรณ์หุ่นยนต์
คอมแพคดิสก์ถูกใช้เป็นพื้นฐานสำหรับการผลิตหุ่นยนต์ สำหรับองค์ประกอบพลังงานพวกเขาจะถูกเชื่อมต่อโดยใช้สลักเกลียว M2 บอร์ดอิเล็กทรอนิกส์รวมถึงช่องใส่แบตเตอรี่ติดอยู่ด้วยเทป
ตอนนี้เกี่ยวกับเครื่องยนต์พวกเขาอยู่ในมุมหนึ่งและเพลาของพวกเขาวางอยู่ตรงข้ามถนน ดังนั้นจึงไม่จำเป็นต้องแยกล้อผลิต สลักเกลียวยึดโดยใช้เฟรมที่ทำจากสายโรงเรียน
แบตเตอรี่“ นิ้วก้อย” สามตัวป้อนหุ่นยนต์พวกมันถูกติดตั้งในกรณีพิเศษ โดยรวมแหล่งจ่ายไฟจะผลิต 4.5 V
และในที่สุดเครื่องตรวจจับแสงก็มีเพียงอันเดียวที่นี่คือประเภท TSOP ได้รับสัญญาณมอดูเลตจากการควบคุมระยะไกลด้วยหุ่นยนต์ที่สามารถควบคุมได้
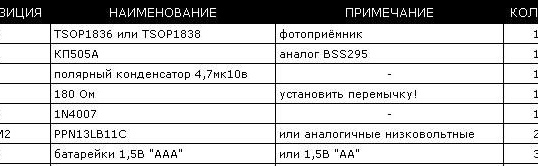
วัสดุและเครื่องมือสำหรับการผลิต:
- เนคไทไนล่อน
- ประเภทโฟโตตรวจจับ TSOP1836;
- ทรานซิสเตอร์ผลสนามเดียว (KP505A);
- คอมแพคดิสก์
- fular สำหรับแบตเตอรี่ในสามส่วน
- แบตเตอรี่ "เล็กน้อย" สามก้อน
- ไม้บรรทัดพลาสติก
- สกรูสำหรับยึดเฟรม
- สายไฟและสวิตช์ (ข้ามแบบ)
กระบวนการผลิต:
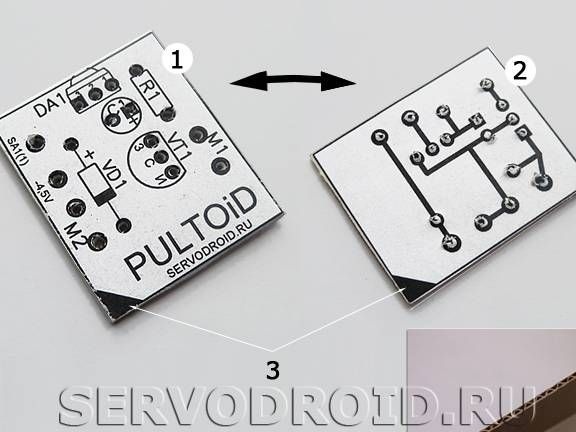
ขั้นตอนแรก ออกแบบ PCB
ในการสร้างแผงวงจรคุณต้องพิมพ์ภาพวาดบนกระดาษก่อน คุณควรได้ภาพสองภาพในหนึ่งภาพวาดการติดตั้งและอีกด้านหนึ่งของบอร์ด ทั้งหมดคณะกรรมการจะประกอบด้วยสามองค์ประกอบในศูนย์จะมีกระดาษแข็งลูกฟูกติดกาวด้วยกระดาษสำนักงานทั้งสองด้าน ในการติดกาวบอร์ดแนะนำให้ใช้แท่งกาวแห้ง
ขั้นตอนที่สอง การติดตั้งส่วนประกอบวิทยุ
เมื่อติดตั้งส่วนประกอบอิเล็กทรอนิกส์เป็นสิ่งสำคัญที่จะไม่ลืมหรือตัดขอบที่ยื่นออกมาของหน้าสัมผัส ต่อจากนั้นพวกมันจะงอและทำให้วงจรไฟฟ้าถูกสร้างขึ้น องค์ประกอบทั้งหมดเชื่อมต่อกันด้วยการบัดกรีตามรูปแบบที่กำหนด
ตัวต้านทาน R1 ในวงจรจะต้องถูกแทนที่ด้วยจัมเปอร์ใด ๆ ในส่วนของตัวตรวจจับแสงลำดับที่ถูกต้องของการเชื่อมต่อนั้นจะถูกแสดงในภาพถ่ายด้วย

ขั้นตอนที่สาม การติดตั้ง Power Frame
ในการติดตั้งเครื่องยนต์คุณจะต้องสร้างเฟรมพลังงาน เป็นวัสดุผู้ปกครองโรงเรียนพลาสติกจะใช้ที่นี่ มันจะต้องถูกตัดออกเป็นสองส่วนและงอตามที่ระบุไว้ในภาพ ในการทำให้ผู้ปกครองเริ่มงอคุณต้องนำปลายหัวแร้งร้อนไปยังที่ที่มีการโก่งตัวที่ระยะประมาณ 2 มม. นอกจากนี้สำหรับวัตถุประสงค์เหล่านี้คุณสามารถใช้ไดร์เป่าผมก่อสร้าง ไม้บรรทัดจะต้องโค้งงออย่างราบรื่นกับมุมประมาณ 30 องศา
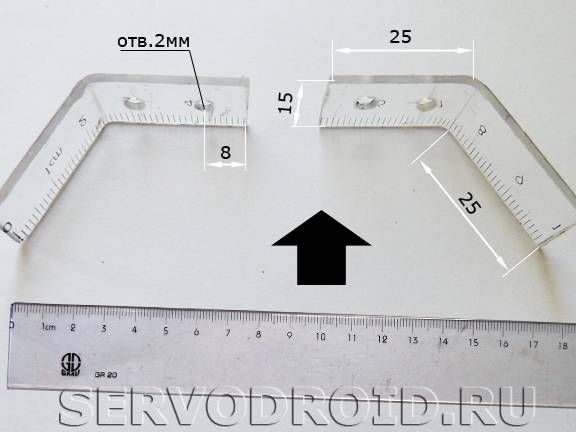

หลังจากสร้างเฟรมแล้วคุณสามารถดำเนินการติดตั้งต่อได้ ในการดำเนินการนี้ให้ใช้น็อต CD และ 2 มม. พร้อมน็อต นอกจากนี้รูที่มีเส้นผ่านศูนย์กลางอย่างน้อยสองมิลลิเมตรจะถูกเจาะในตำแหน่งที่ถูกต้องและเฟรมจะยึดด้วยสกรู เพื่อให้เฟรมไม่ลื่นหลุดก่อนที่จะทำการติดตั้งคุณจำเป็นต้องติดเทปสองด้านบนแผ่นดิสก์
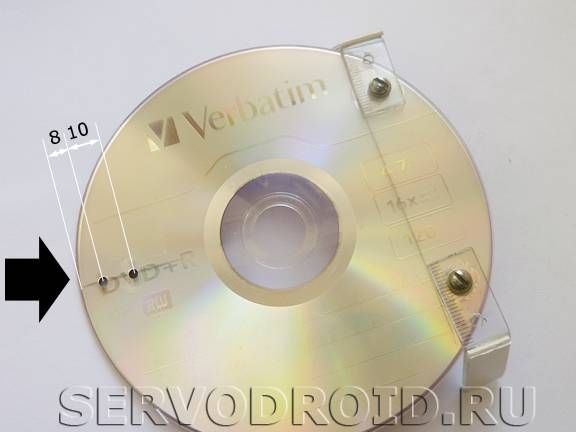
ขั้นตอนที่สี่ การติดตั้งส่วนรองรับด้านหน้า
ที่ด้านหน้าของแผ่นดิสก์คุณจะต้องเจาะสองรูและเตรียมไนลอนปาด ขนาดน่าเบื่อควรเป็น 3x150mm มันจะต้องแทรกตามที่ระบุไว้ในภาพ เป็นผลให้การสนับสนุนที่เกิดขึ้นจะลดลงอย่างสมบูรณ์แบบเมื่อหุ่นยนต์ทำงานและเหินไปตามถนน


ขั้นตอนที่ห้า การติดตั้งเครื่องยนต์
เพื่อป้องกันไม่ให้เพลาของมอเตอร์เลื่อนไปตามถนนต้องใส่อุปกรณ์ป้องกัน พวกเขาทำจากเหงือกซึ่งสามารถพบได้ในวางของปากกาฮีเลียม ในการติดตั้งเครื่องยนต์ก่อนอื่นคุณต้องติดเทปกาวสองหน้าไว้ที่ส่วนรองรับเพื่อป้องกันการลื่นไถล ในที่สุดเครื่องยนต์ก็จะถูกยึดด้วยไนล่อน

ขั้นตอนที่หก สวิตช์และการเชื่อมต่อแหล่งจ่ายไฟ
ในฐานะที่เป็นแหล่งพลังงานคุณสามารถใช้แบตเตอรี่ใด ๆ ที่มีกระแสไม่เกิน 5 โวลต์ ในกรณีนี้จะใช้เคสสำหรับแบตเตอรี่สามนิ้วซึ่งรวม 4.5 V
สำหรับสวิทช์มันถูกติดตั้งบนช่องว่างของการสัมผัสในเชิงบวกที่มาจากแหล่งพลังงาน สายสีแดงติดอยู่กับบอร์ดเพื่อยึด SA1 (1) และลวดสีดำไปยังขา -4.5V


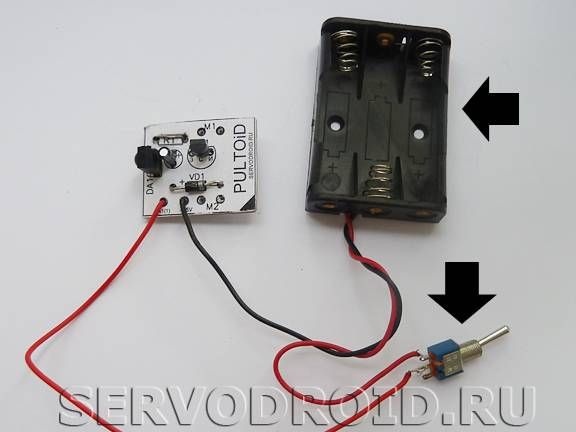
นอกจากนี้ในขั้นตอนนี้คุณสามารถเชื่อมต่อมอเตอร์สายไฟของพวกเขาเชื่อมต่อกับหน้าสัมผัส M1 และ M2
ขั้นตอนที่เจ็ด ขั้นตอนสุดท้าย
ในขั้นตอนสุดท้ายองค์ประกอบอิเล็กทรอนิกส์ทั้งหมดจะต้องได้รับการแก้ไข พวกเขาจะแนบไปกับดิสก์โดยใช้เทปสองด้าน ในส่วนของสวิทช์นั้นจะต้องได้รับการแก้ไขด้วยคุณสามารถใช้กาวร้อนได้

ตอนนี้หุ่นยนต์ก็พร้อม คุณสามารถลองเปิดใช้งานและให้คำสั่งเพื่อเปิดใช้งานโดยใช้รีโมทควบคุม