

บทความนำเสนอวิธีการสร้างหุ่นยนต์เช่น photokinetics โดยไม่ต้องใช้การบัดกรี Svetokinetics ถูกเรียกว่าโรบอตดังกล่าวที่ติดตั้งไฟ LED หนึ่งดวงขึ้นไปที่ทำงานตามอัลกอริธึมบางอย่าง เมื่อทำงานแล้ว หุ่นยนต์ สร้างเอฟเฟกต์แสงต่างๆ
ในการประกอบโฟโตคิเนติกส์คุณจะต้องใช้วัสดุและเครื่องมือขั้นต่ำ หากมีหุ่นยนต์หลายตัวในท้ายที่สุดมันจะเป็นไปได้ที่จะสร้างการแสดงแสงทั้งหมด หากคุณเปิดใช้งานหุ่นยนต์มันจะเริ่มหมุนส่งลำแสงไปในทิศทางที่แตกต่างกัน เป็นการดีที่สุดที่จะตรวจสอบการทำงานของหุ่นยนต์ในห้องมืดหรือตอนค่ำ นอกจากนี้เพื่อให้หุ่นยนต์ทำงานได้อย่างมีประสิทธิภาพคุณจะต้องซื้อแบตเตอรี่ที่มีพลังงานเพียงพอ
คุณสามารถดูวิธีการทำงานของหุ่นยนต์ในวิดีโอ:
วัสดุและเครื่องมือสำหรับการผลิตหุ่นยนต์:
- กล่องพลาสติก (จากที่หุ้มรองเท้า);
- ไฟ LED ใด ๆ
- ต้องใช้แบตเตอรี่ CR2032 ที่มีกระแส 3V เป็นแหล่งพลังงาน
- เทปฉนวนสีดำ
- มอเตอร์ขนาดเล็กทำงานที่แรงดันไฟฟ้า 3-5 โวลต์
- รอกพลาสติกสำหรับมอเตอร์

ส่วนประกอบทั้งหมดจะอยู่ภายในเคส ในฐานะที่เป็นไฟ LED คุณสามารถเลือกใด ๆ โดยเฉพาะอย่างยิ่งสว่างที่สุด สีของเทปไฟฟ้าก็ไม่เหมือนกัน
กระบวนการผลิตของหุ่นยนต์:
ขั้นตอนแรก การสร้างรายชื่อไดโอด
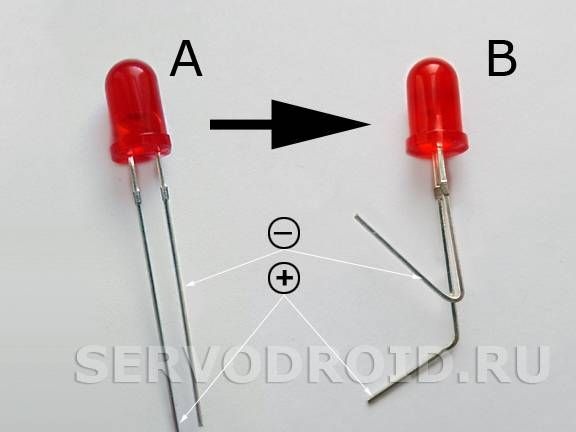
ก่อนที่จะติดตั้ง LED จำเป็นต้องสร้างหน้าสัมผัส สำหรับจุดประสงค์เหล่านี้คุณต้องใช้คีม หากเรากำลังพูดถึง LED ที่นำเข้าการติดต่อที่ยาวนานของพวกเขาหมายถึงขั้วบวกนั่นคือบวก การติดต่อสั้น ๆ คือแคโทดมีการเชื่อมต่อลบที่นี่ หากขั้วกลับด้านไดโอดจะไม่เรืองแสง หน้าสัมผัส LED จะต้องงอตามที่ระบุในภาพ
ผู้เขียนไม่แนะนำให้ใช้ไฟ LED ลดแสงเพื่อวัตถุประสงค์เหล่านี้
ขั้นตอนที่สอง การติดตั้ง LED
ในการติดตั้ง LED คุณต้องใช้เทปพันสายไฟคุณภาพสูง สิ่งที่สำคัญที่สุดคือเทปมีความหนืดที่ดีมิฉะนั้นโครงสร้างทั้งหมดจะพังทลายระหว่างการทำงานของหุ่นยนต์

ตอนนี้คุณต้องนำมอเตอร์พร้อมรอกไปติดตั้งที่เพลาต้องต่อไดโอดเข้ากับมอเตอร์เพื่อให้ขั้วบวกอยู่ในตัวเรือนและหน้าสัมผัส ถัดไปผู้ติดต่อจะต้องติดกาวกับมอเตอร์ด้วยเทปไฟฟ้าขนาด 2 ซม. ในที่เดียวกันคุณจะต้องใช้สายสีแดงจากมอเตอร์ ดังนั้นไดโอดจะเชื่อมต่อกับหน้าสัมผัสบวกของมอเตอร์ผ่านตัวเรือนมอเตอร์ ในขั้นตอนสุดท้ายคุณจะต้องกดเทปไฟฟ้าอย่างระมัดระวังเพื่อแก้ไขการสัมผัส
ขั้นตอนที่สาม ติดตั้งแหล่งพลังงาน
เพื่อให้หุ่นยนต์ทำงานได้อย่างถูกต้องแบตเตอรี่ที่ติดตั้งต้องใหม่ ขั้วบวกของแบตเตอรี่ถูกระบุด้วยเครื่องหมายบวกนี่คือหน้าสัมผัสแบตเตอรี่ที่ใหญ่ที่สุดในแง่ของพื้นที่ คุณต้องนำลวดสีดำออกจากมอเตอร์และใช้เทปไฟฟ้าเพื่อต่อเข้ากับขั้วลบของแบตเตอรี่ จากนั้นจะต้องติดตั้งแบตเตอรี่ในลักษณะที่เหมาะสมกับตัวเรือนโลหะของมอเตอร์ และแคโทดของ LED สามารถทำงานภายใต้เทปไฟฟ้าโดยเชื่อมต่อกับขั้วลบของแบตเตอรี่ เมื่อปิดวงจรมอเตอร์ควรเริ่มหมุนและไดโอดจะสว่างขึ้น ตอนนี้ต้องเปิดวงจรด้วยการเบี่ยงเบนแบตเตอรี่จากมอเตอร์เล็กน้อย



ตอนนี้มันยังคงติดตั้ง อี มีส่วนร่วมในที่อยู่อาศัย ในกรณีนี้จะมีการใช้เคสจากรองเท้าหุ้มหรือเป็นส่วนบน หลังจากการออกแบบวางไว้ในที่อยู่อาศัยเนื่องจากผลการหนีบของมอเตอร์ก็จะยึดมั่น
สามารถปรับความเร็วการหมุนของหุ่นยนต์ได้ เครื่องยนต์ยิ่งลึกเข้าไปในตัวเรือนยิ่งหมุนได้เร็วเท่าไร
นั่นคือทั้งหมดที่หุ่นยนต์พร้อมสำหรับการทดสอบ ตอนนี้คุณต้องปิดวงจรอีกครั้งปิดไฟและเพลิดเพลินไปกับเอฟเฟกต์แสงที่เป็นเอกลักษณ์