
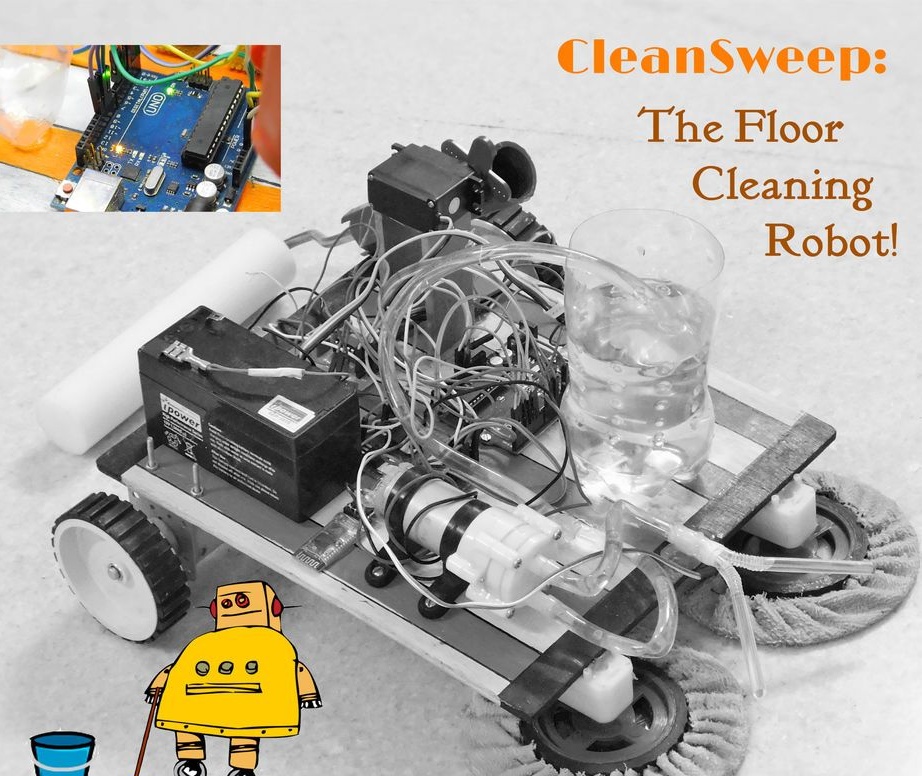


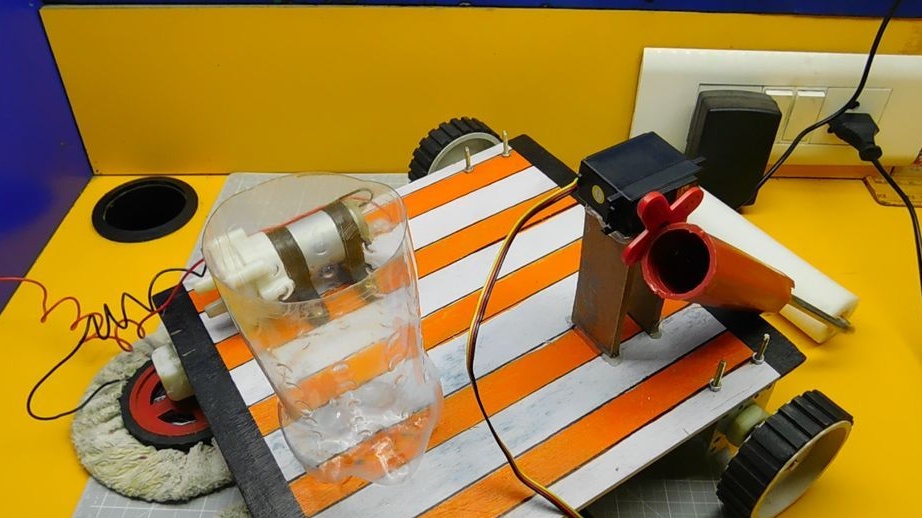
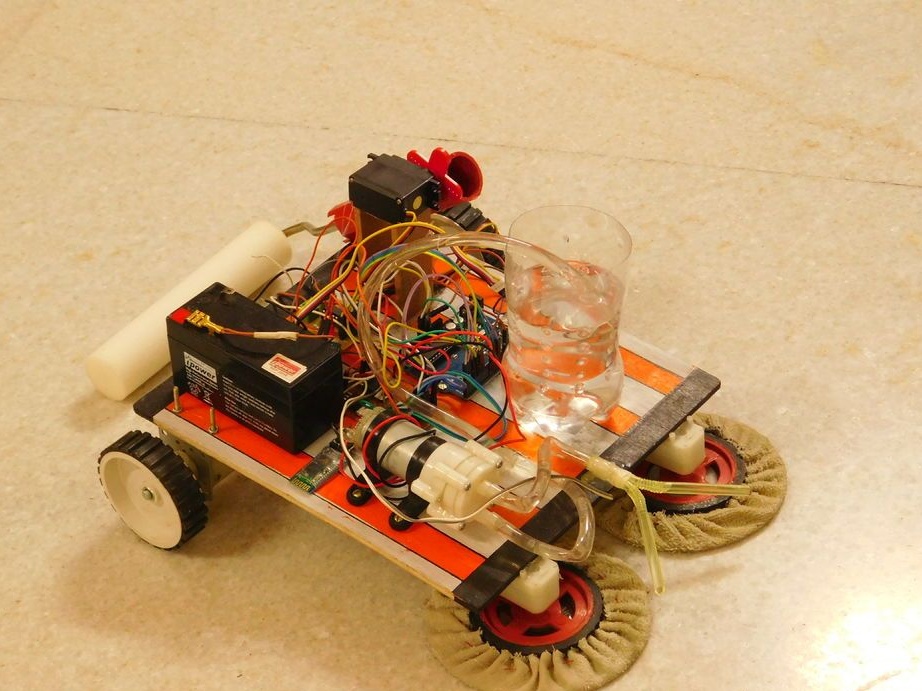
หุ่นยนต์ผู้เก็บเกี่ยวมีแปรงถ่านหมุนสองอันติดตั้งที่ด้านหน้าของเพลาเกียร์มอเตอร์ กระปุกเกียร์หมุนด้วยความเร็ว 75 รอบต่อนาที หุ่นยนต์มีถังเก็บน้ำบนเครื่อง ลูกกลิ้งได้รับการแก้ไขที่ด้านหลังของหุ่นยนต์ หุ่นยนต์ผสมกับความช่วยเหลือของล้อคงที่ในแกนของมอเตอร์เกียร์ ทำความสะอาดถูกควบคุมโดยสมาร์ทโฟนผ่านบลูทู ธ ในอนาคตอาจารย์วางแผนที่จะทำให้หุ่นยนต์เป็นอิสระอย่างเต็มที่ มาดูกันว่าอุปกรณ์นี้ทำงานอย่างไร
เครื่องมือและวัสดุ:
- มอเตอร์เกียร์ 100 รอบต่อนาที -2 ชิ้น;
- ล้อสำหรับเครื่องยนต์ -2 ชิ้น;
- มอเตอร์ลดความเร็วล้อ 75 รอบต่อนาที - 2 ชิ้น;
-Arduino อูโน่;
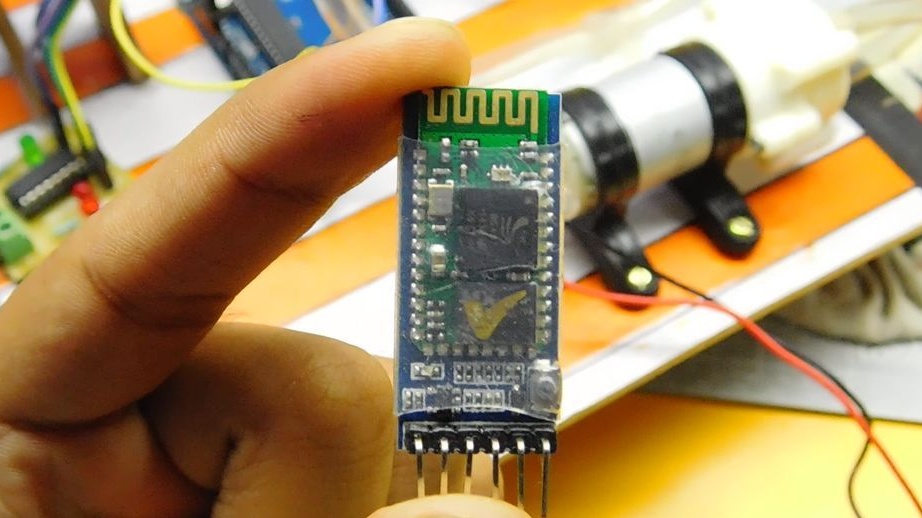
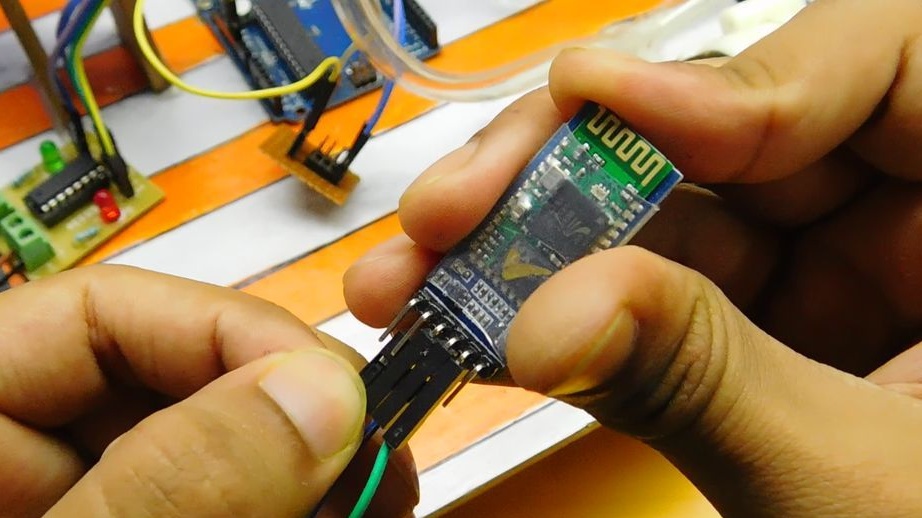
- โมดูลบลูทู ธ HC-05/06;
-Driver L293D;
- Servomotor (การหมุน 180 องศา);
แบตเตอรี่ -12V;
- ปั๊ม 12 V
ทรานซิสเตอร์ TIP31C;
ทรานซิสเตอร์ TIP122;
- ไดรฟ์ซีดี - 2 ชิ้น;
- ลูกกลิ้งทาสี
- ผ้าเช็ดปาก
- เข็มด้วยด้าย
-Trubka;
seeing-;
- จัมเปอร์;
- ติดตั้งบอร์ด;
-Krepezh;
-Fanera;
- ขวดพลาสติก
- เหล็กหล่อ
- ปืนสีฟ้า;
-Drel;
- คีม
-Dremel;
- แปรง
-Colors;
-Marker;
- กรรไกร











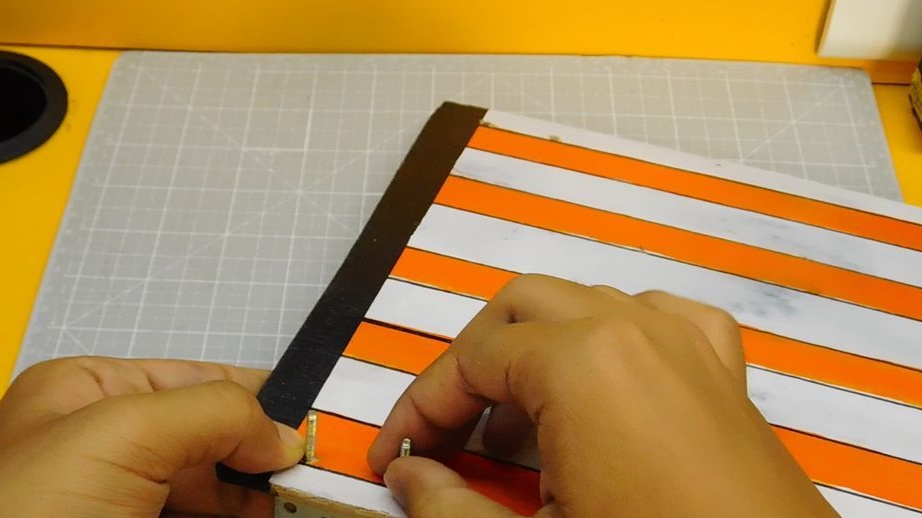
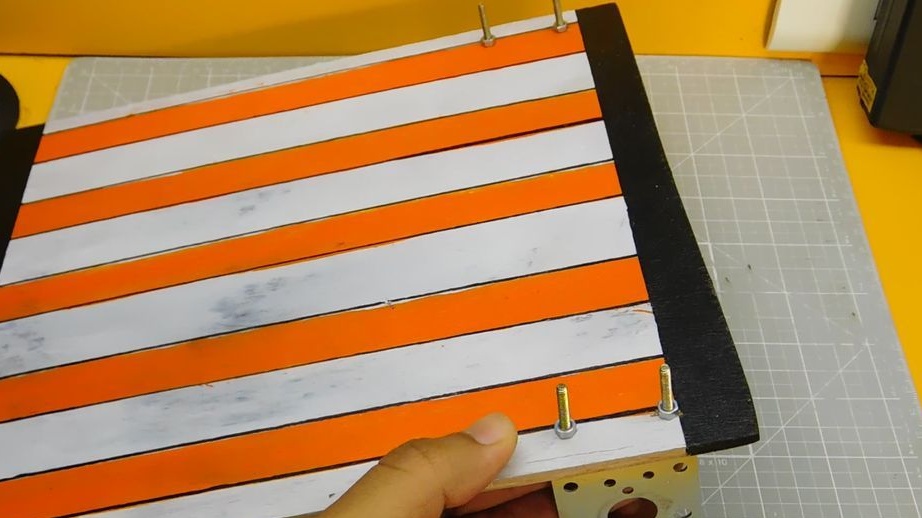
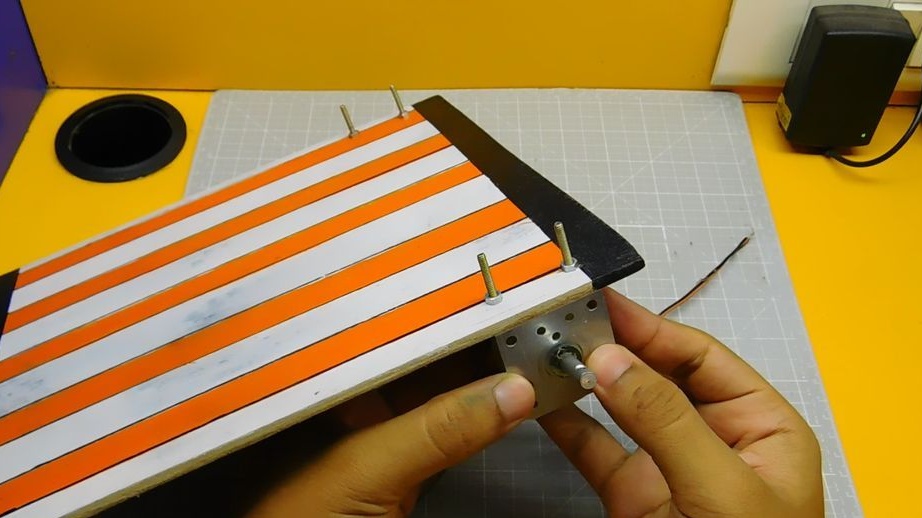
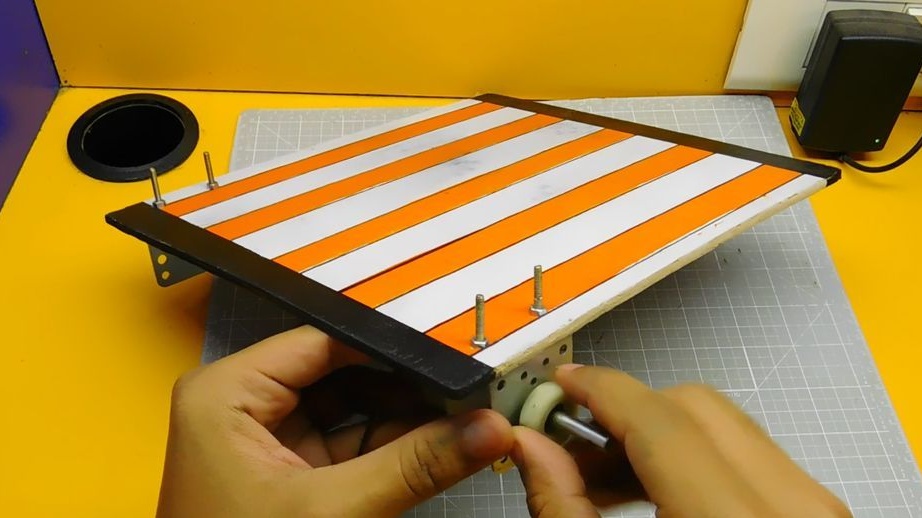
ขั้นตอนที่หนึ่ง: รากฐาน
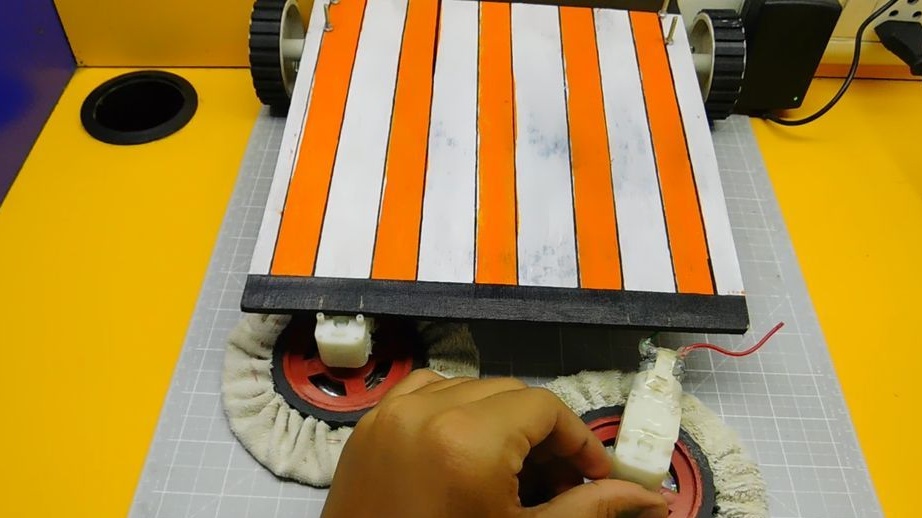
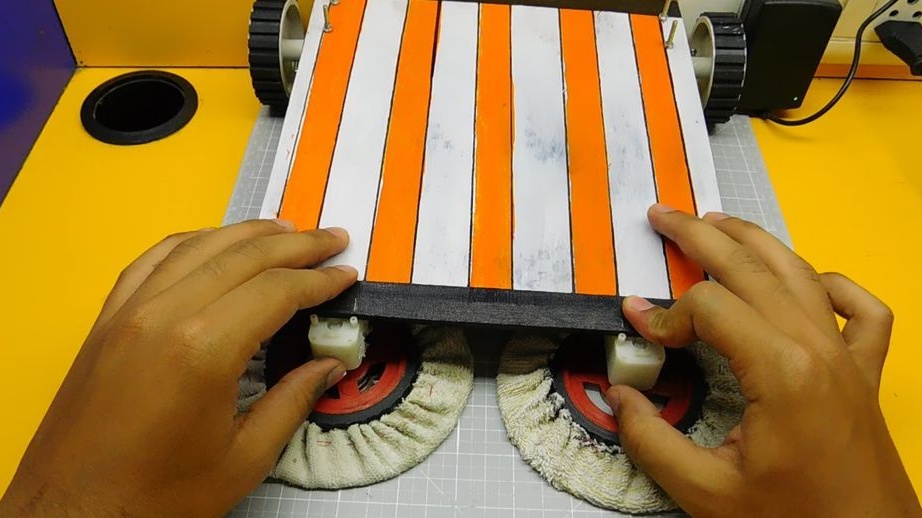
จากไม้อัดตัดฐาน ขนาดของฐานคือ 30 * 22 ซม. ทาสีพื้นฐาน ในอีกด้านหนึ่งจะแก้ไขมอเตอร์เกียร์ แก้ไขมอเตอร์เกียร์ในอีกด้านหนึ่งของฐาน



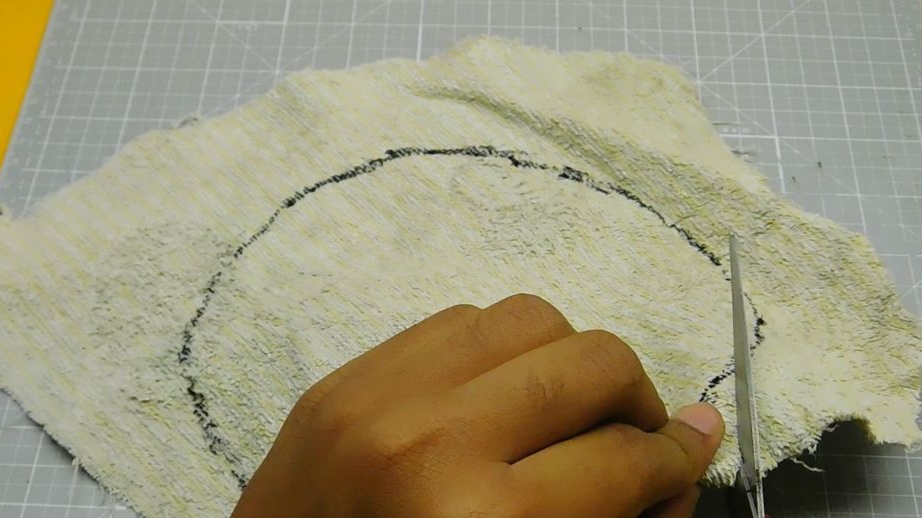
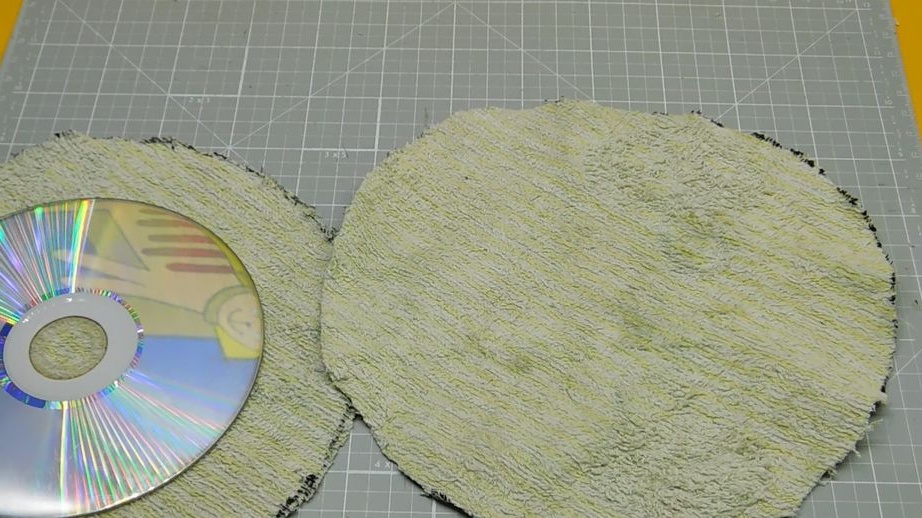
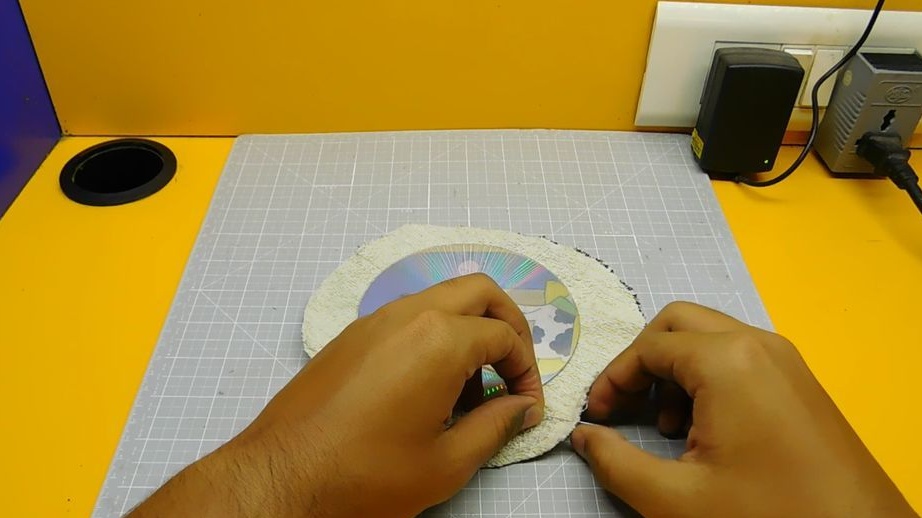
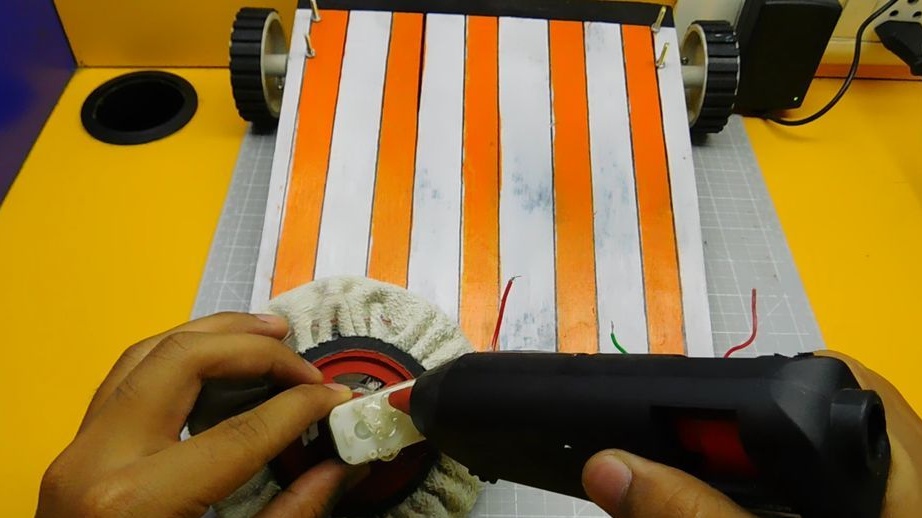
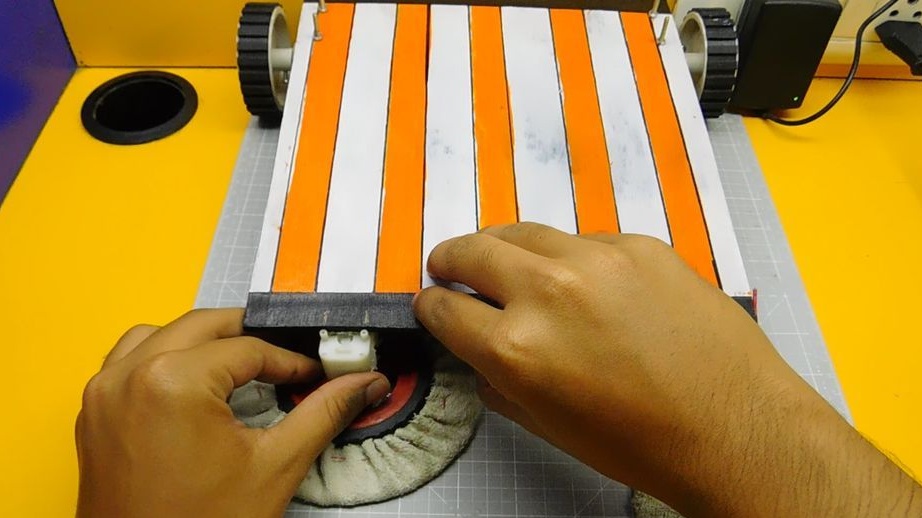
ขั้นตอนที่สอง: แปรง
อาจารย์ทำพู่กันจากซีดีเก่า ตัดผ้าขี้ริ้ว ฝักถั่วเธอ การดำเนินการซ้ำกับดิสก์อื่น ยึดแผ่นดิสก์ด้วยกาวร้อนละลายบนล้อเฟือง รักษาความปลอดภัยทั้งมอเตอร์เกียร์หน้าแพลตฟอร์ม








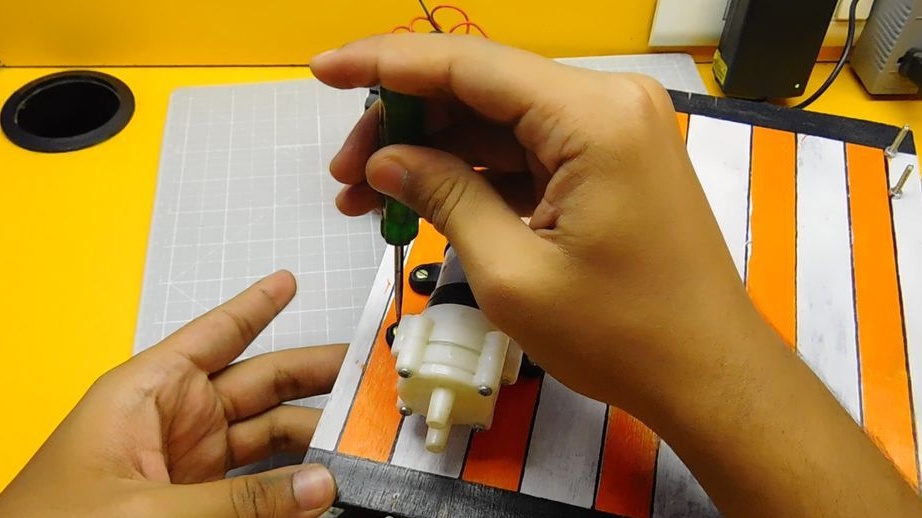
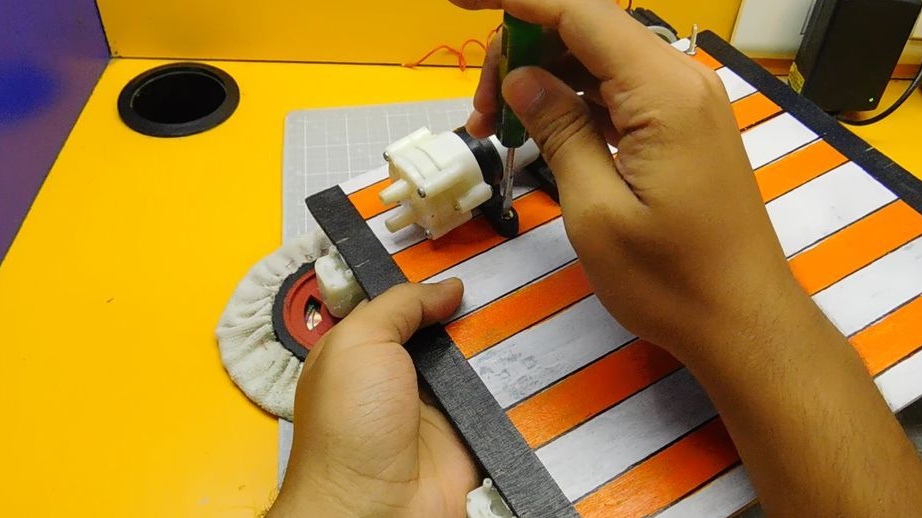
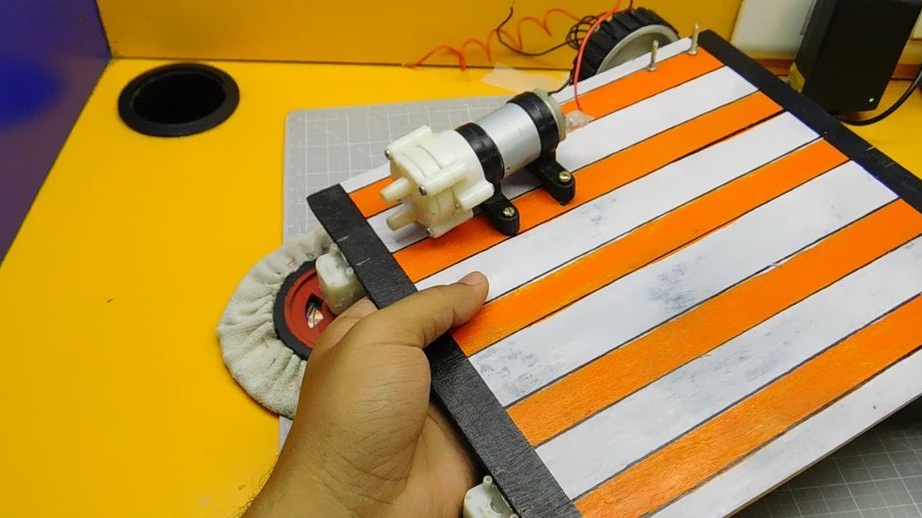
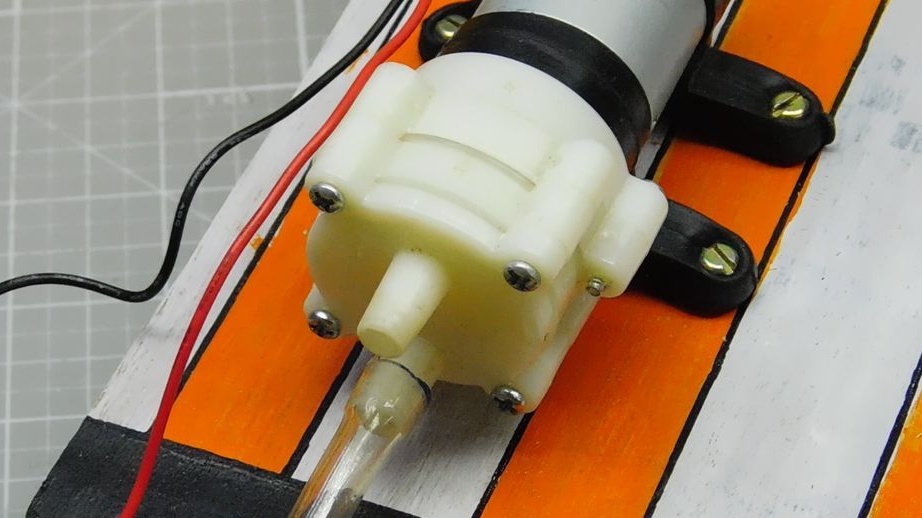
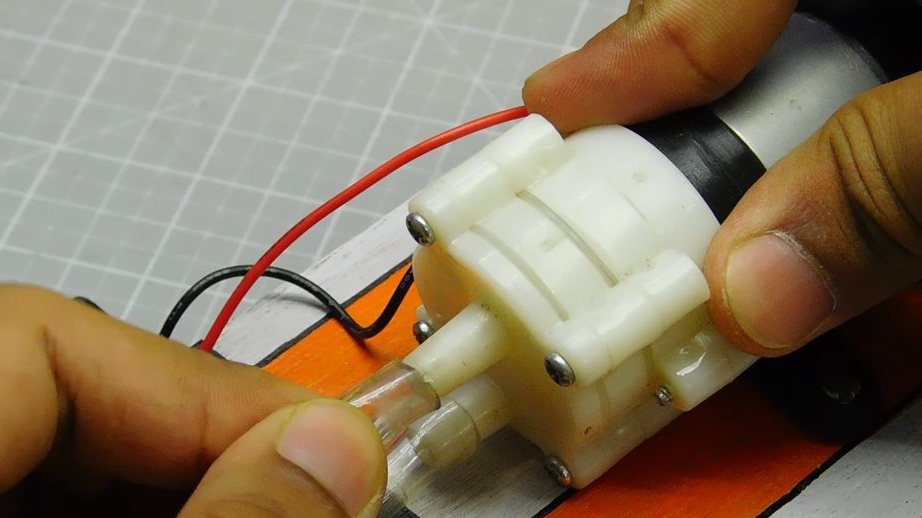
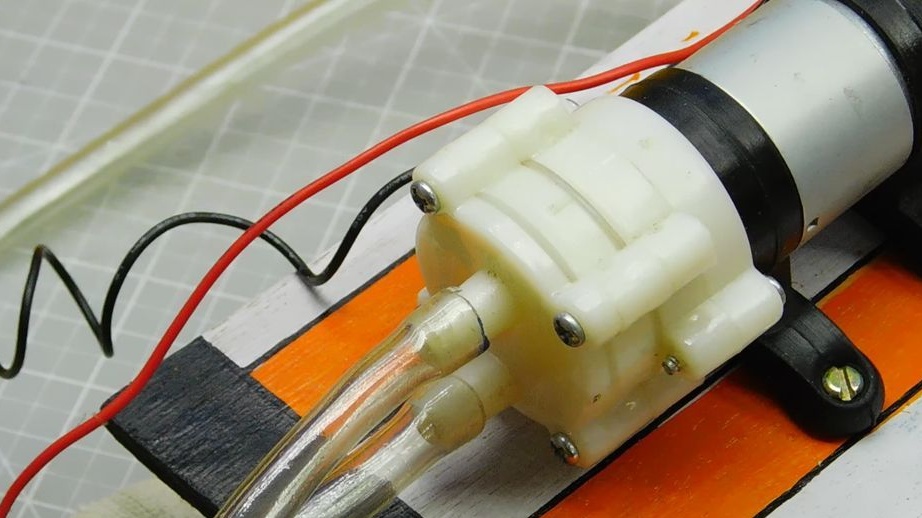
ขั้นตอนที่สอง: การประปา
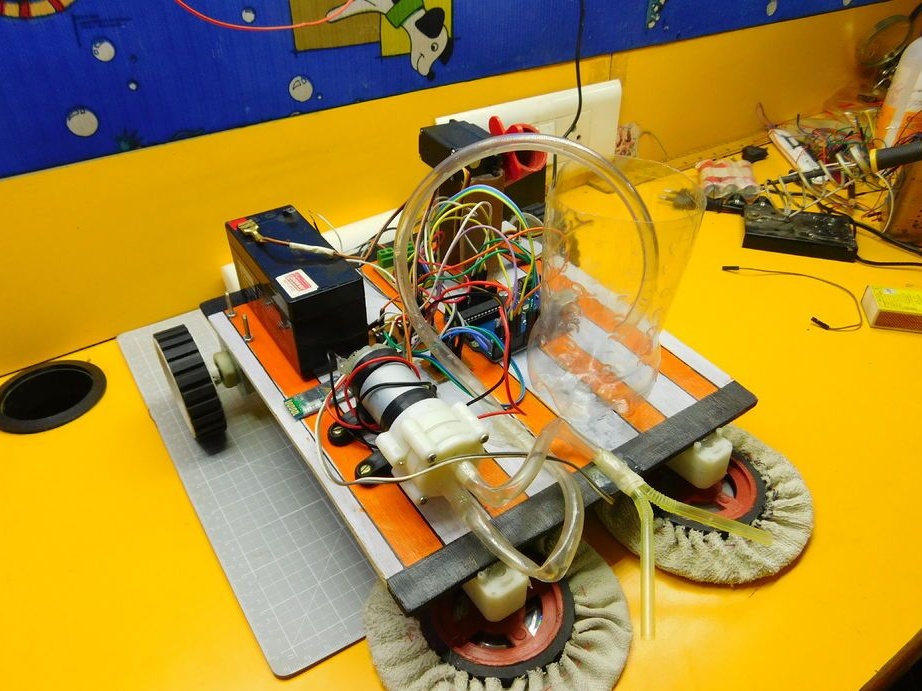
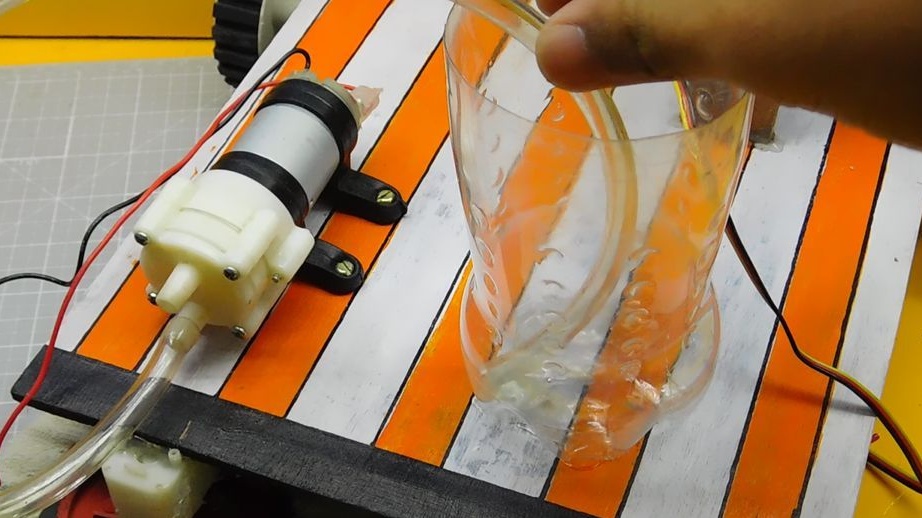
ยึดปั๊มกับแพลตฟอร์ม ตัดส่วนบนของขวดพลาสติกออก ยึดขวดกับแพลตฟอร์ม ติดตั้งท่อน้ำเข้า หลังจากนั้นท่อน้ำประปาไปยังแปรงจะได้รับการแก้ไข








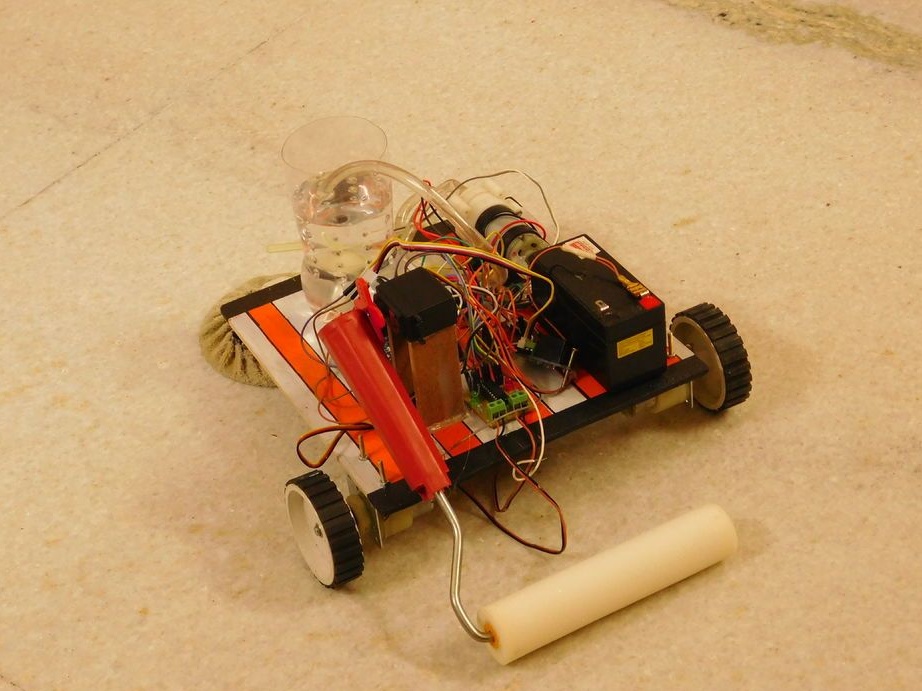
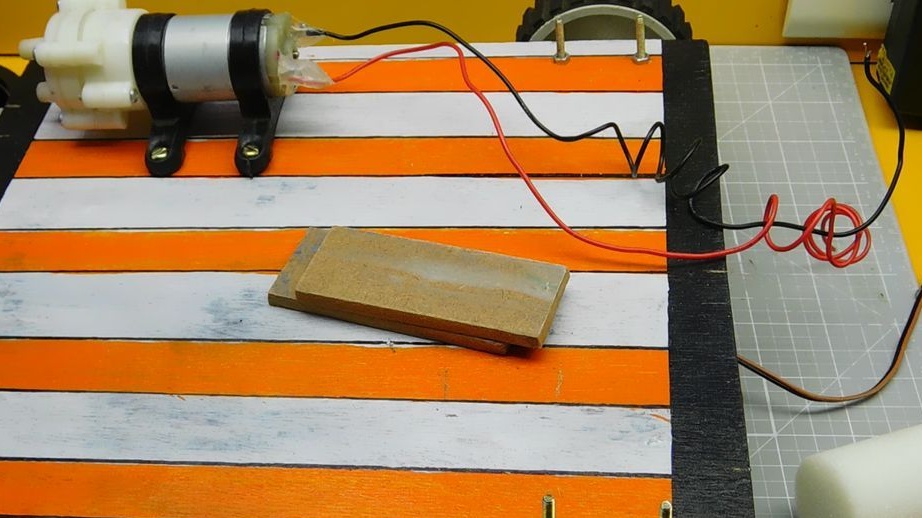
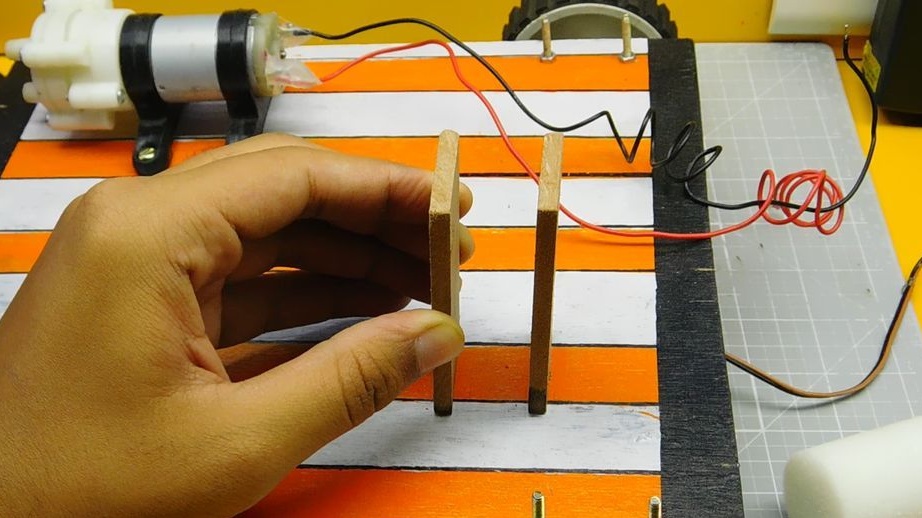
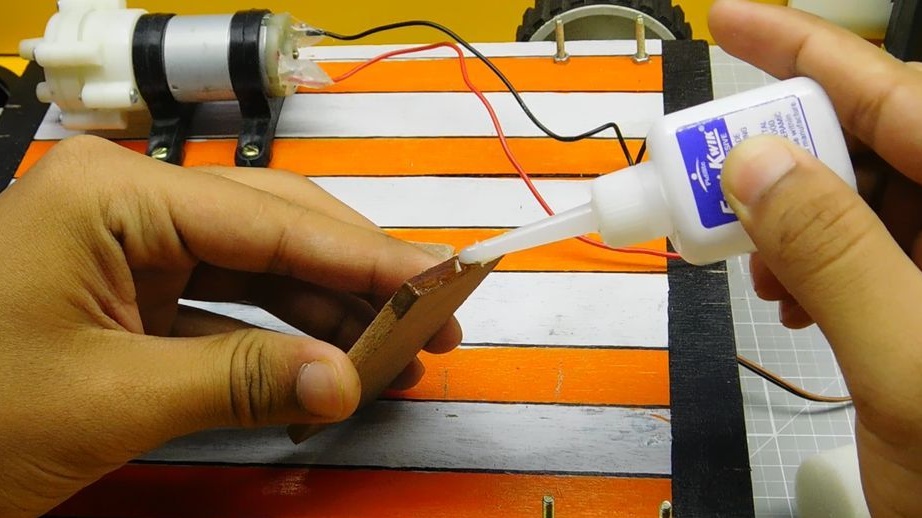
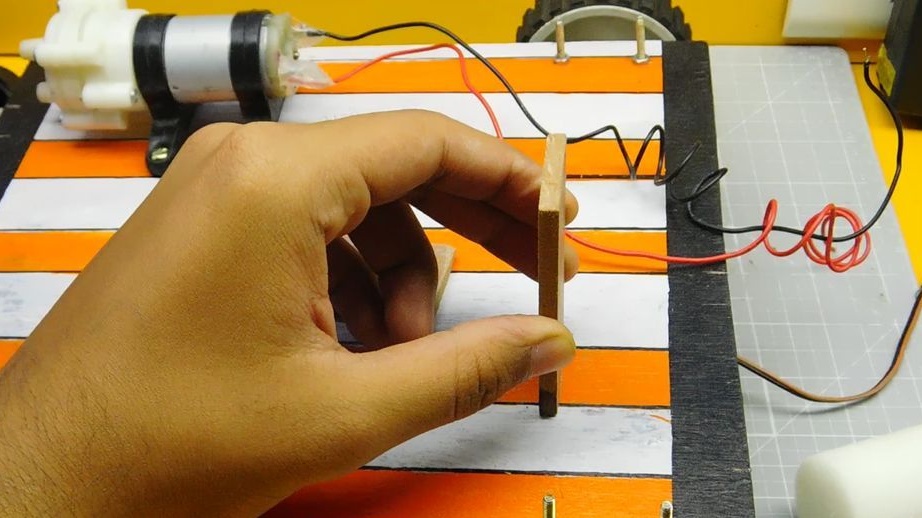
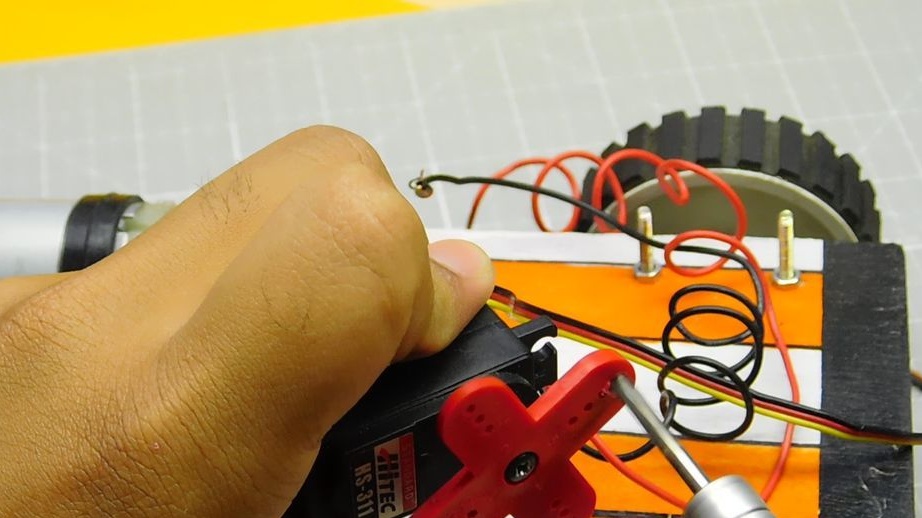
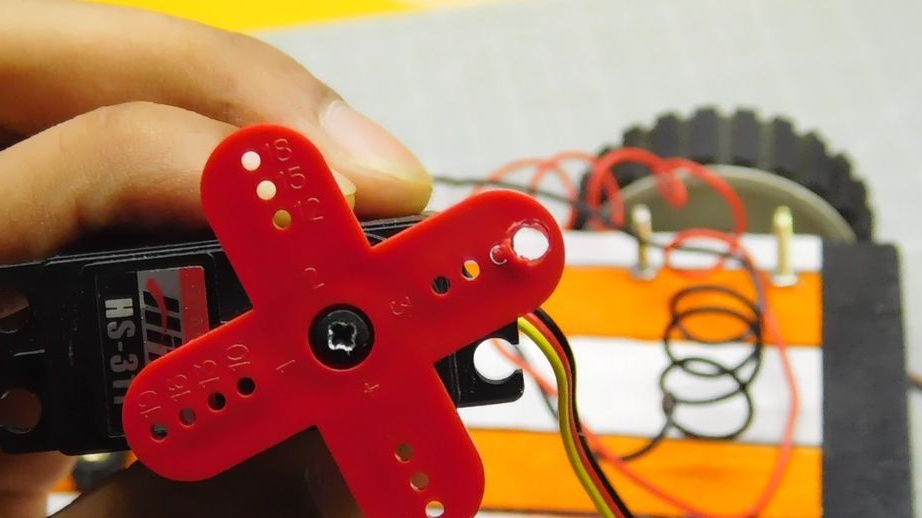
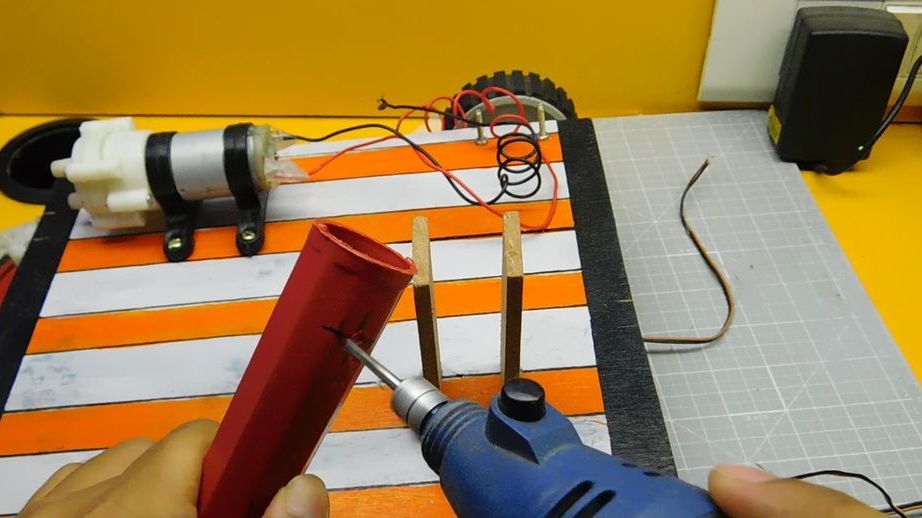
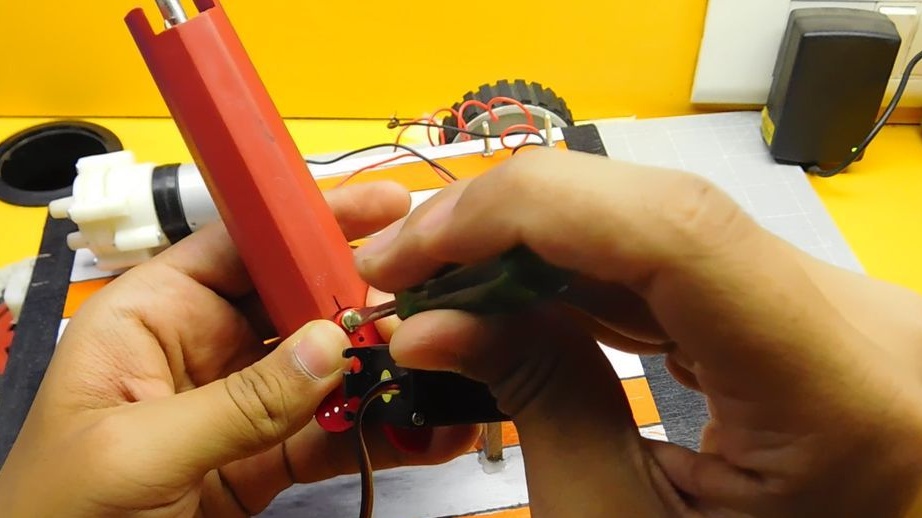
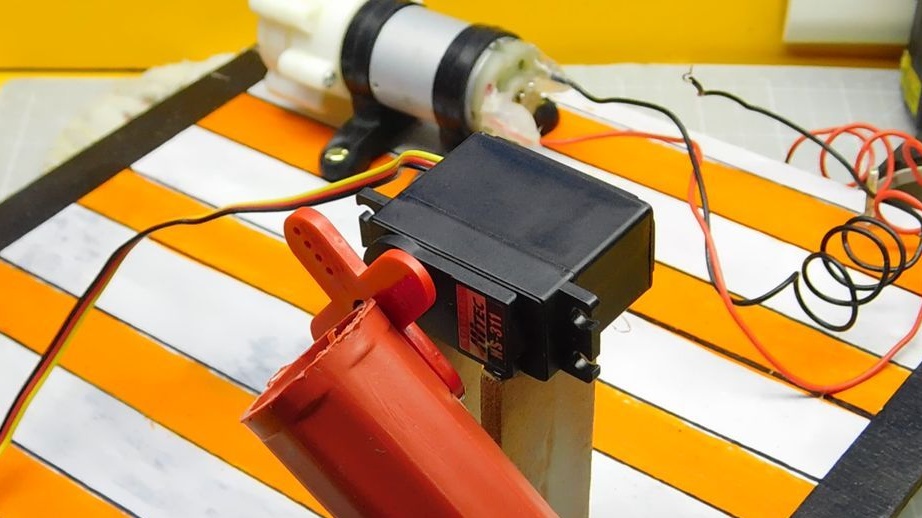
ขั้นตอนที่สาม: กลไกการยกลูกกลิ้ง
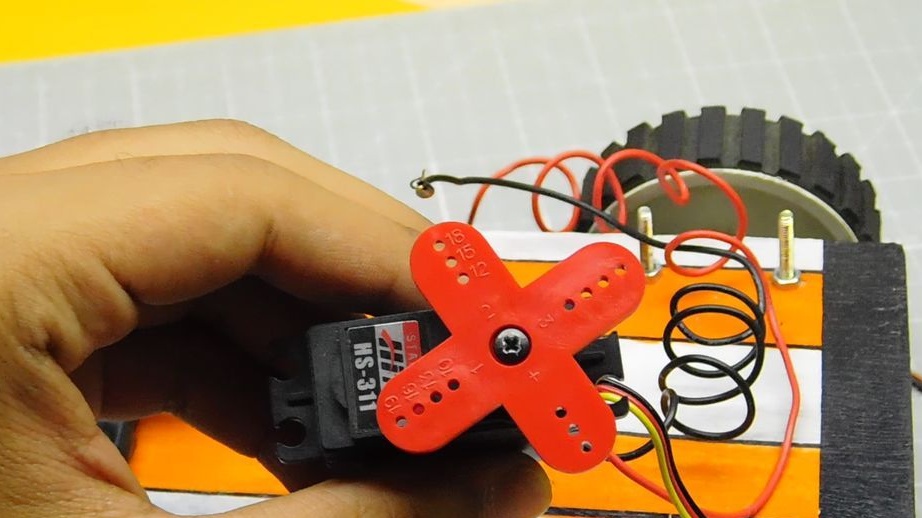
หน้าที่ของลูกกลิ้งคือการรวบรวมฝุ่นละเอียด เนื่องจากลูกกลิ้งเป็นสิ่งจำเป็นในบางครั้งเจ้านายจึงตัดสินใจที่จะสร้างกลไกในการยกและลดลูกกลิ้ง แก้ไขสองแผ่นบนแพลตฟอร์มขนานกัน ทำให้สองรูหนึ่งรูอยู่ในก้านเซอร์โวส่วนที่สองในที่จับลูกกลิ้ง ขันด้ามลูกกลิ้งไปที่คันโยก ยึดเซอร์โวเข้ากับแผ่นไม้


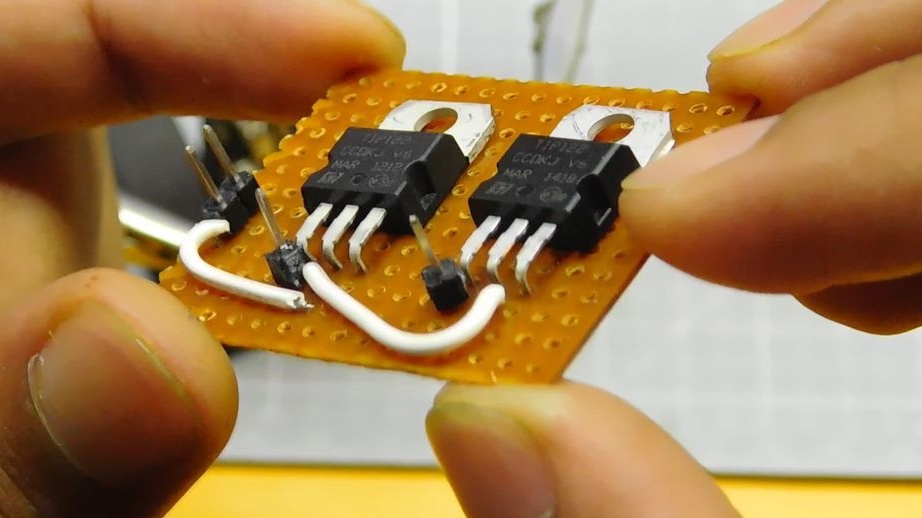
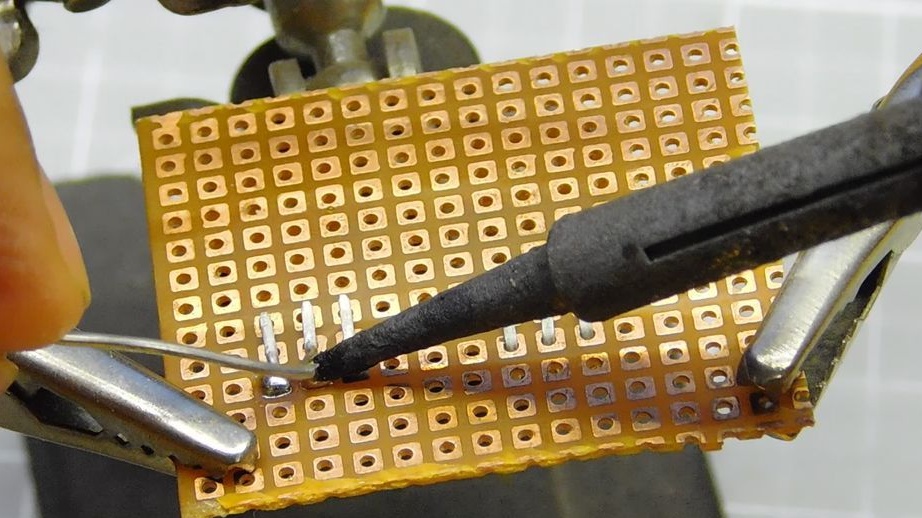
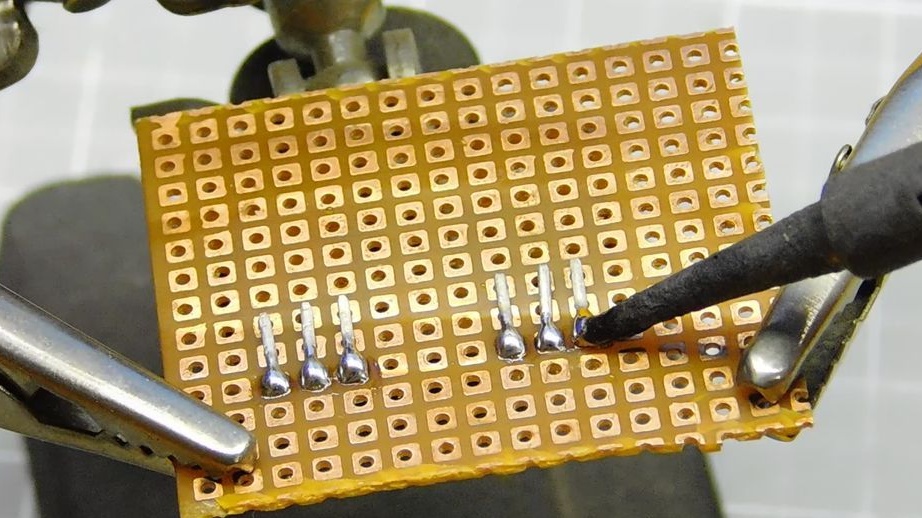
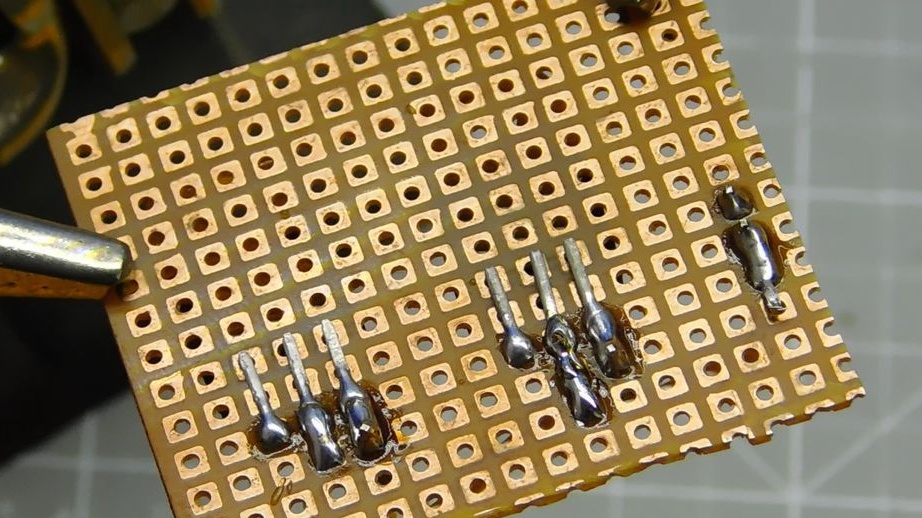
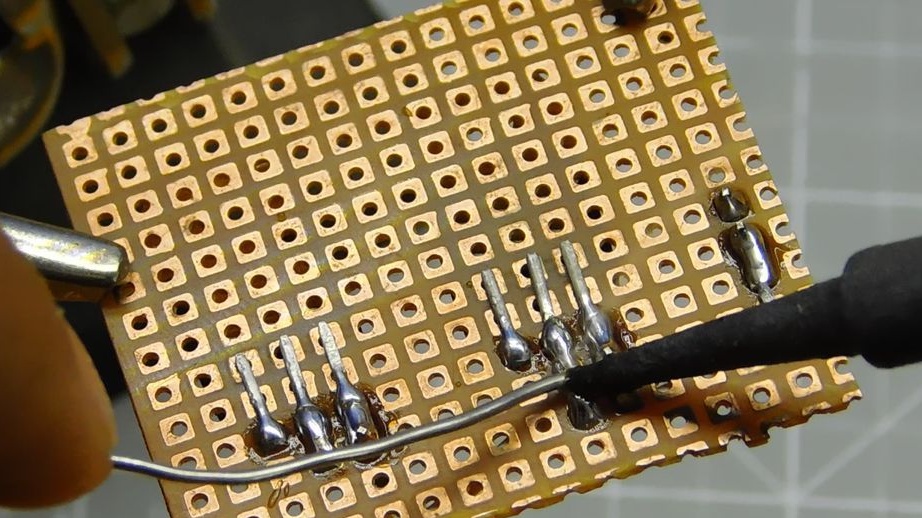
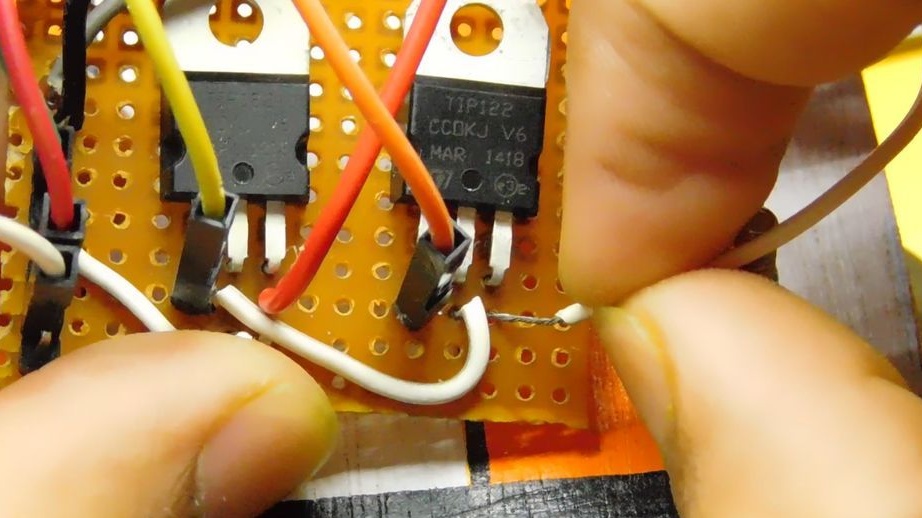
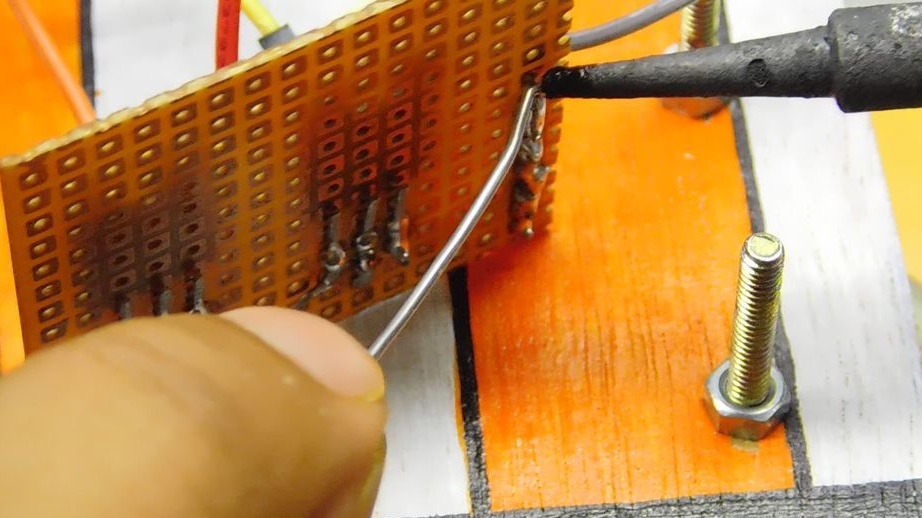
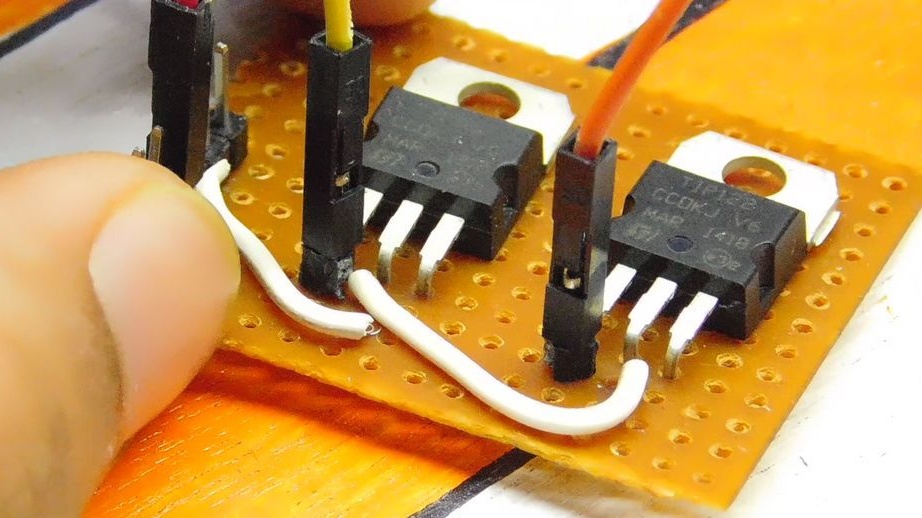
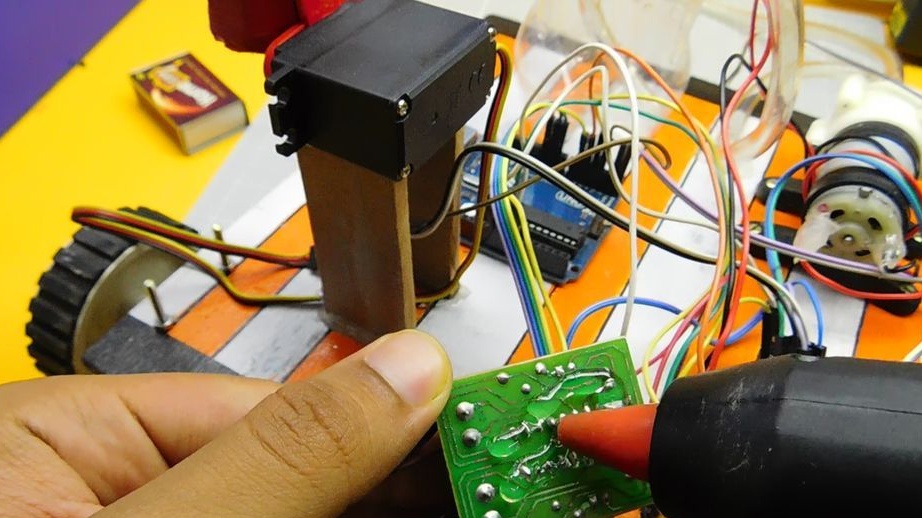
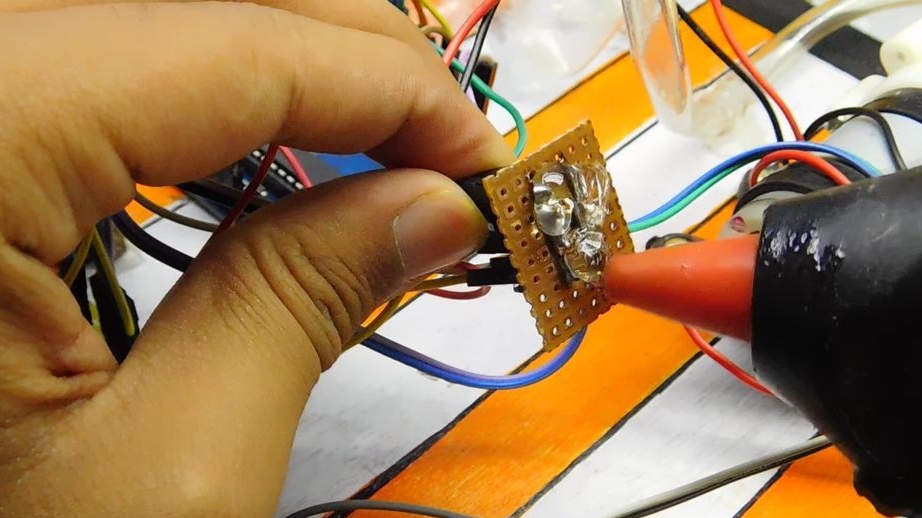
ขั้นตอนที่สี่: ทรานซิสเตอร์
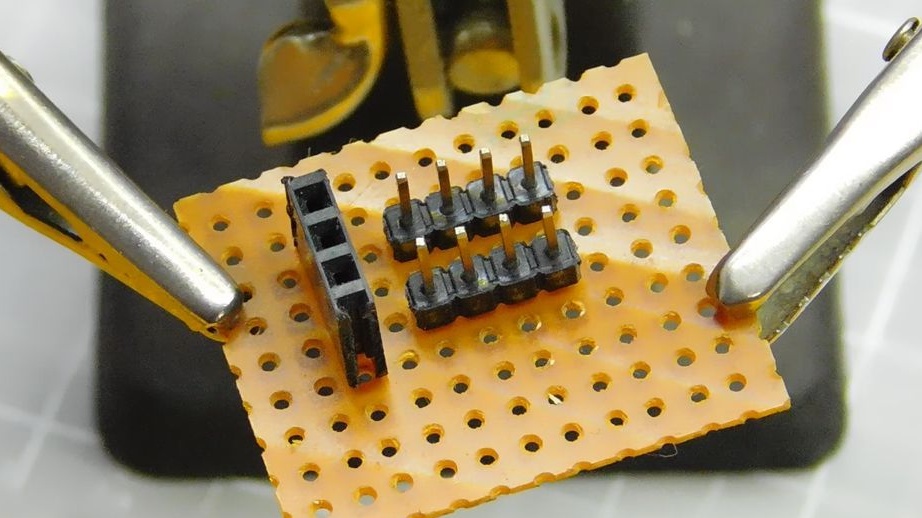
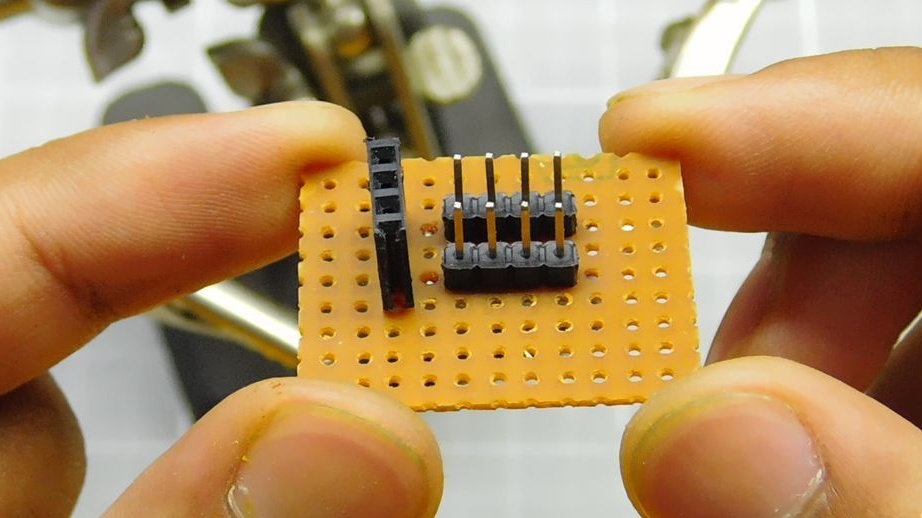
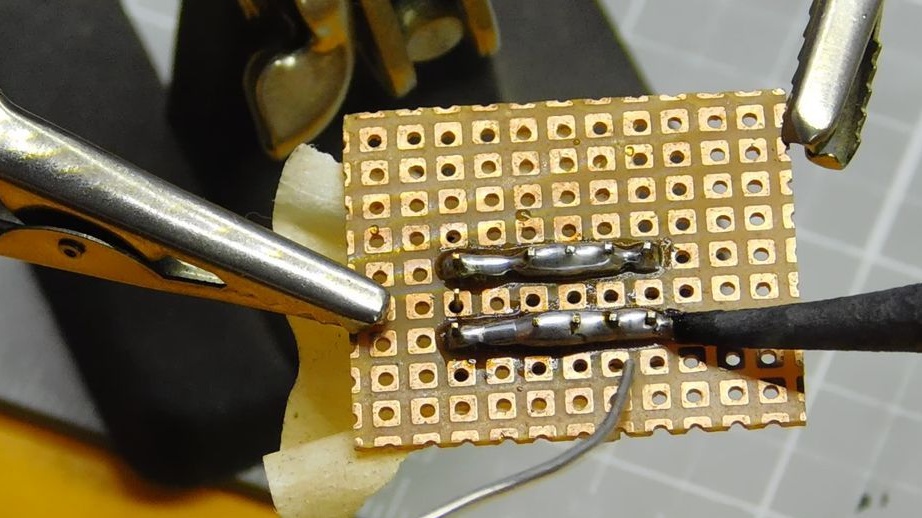
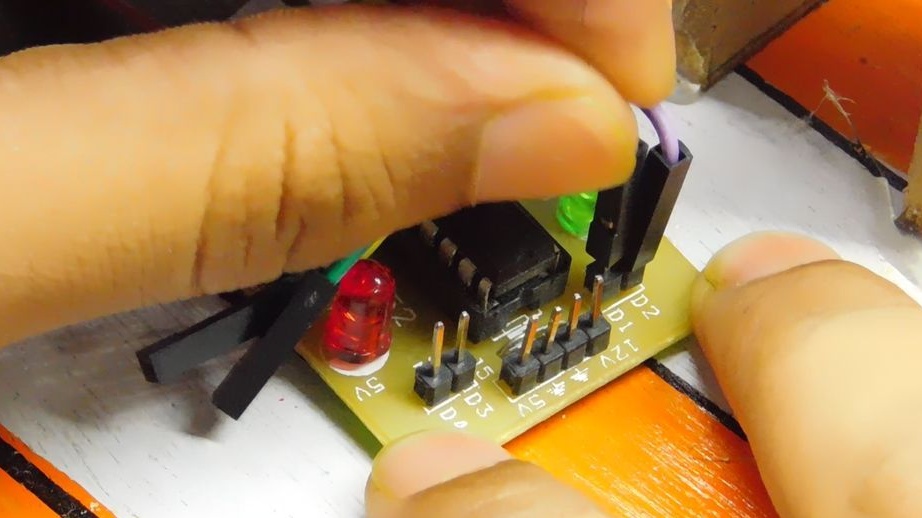
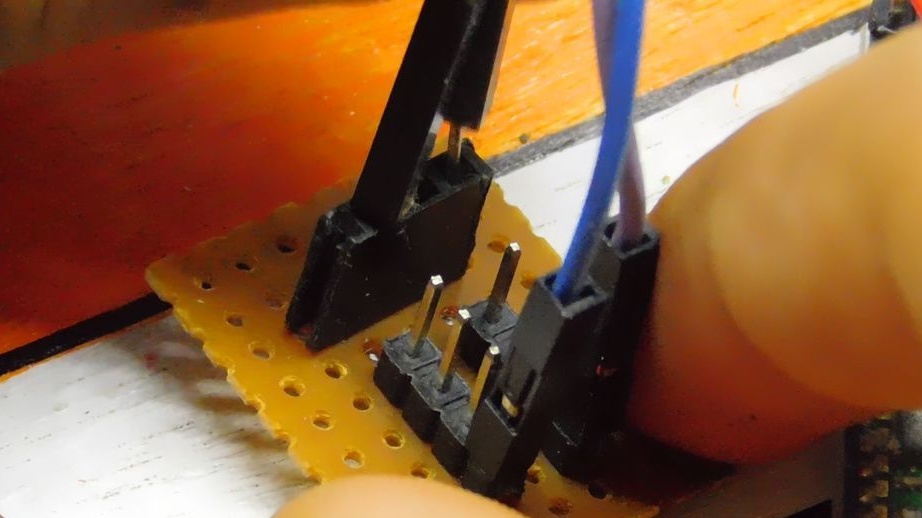
สำหรับปั๊มน้ำและมอเตอร์นั้นจำเป็นต้องใช้กำลังไฟ 12 V แต่เนื่องจาก Arduino ให้พลังงานเพียง 5 โวลต์ดังนั้นเจ้าต้นแบบจึงรวบรวมวงจรบนทรานซิสเตอร์ TIP122นอกจากนี้ตัวช่วยสร้างเพิ่มหมุด + 5V และ Gnd หลายตัวในแผงวงจร
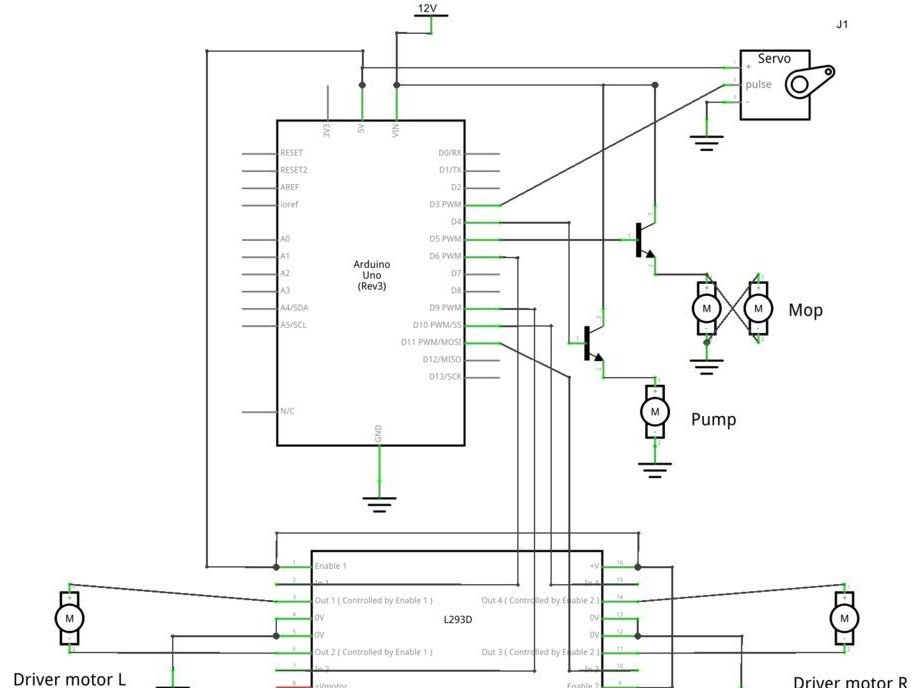
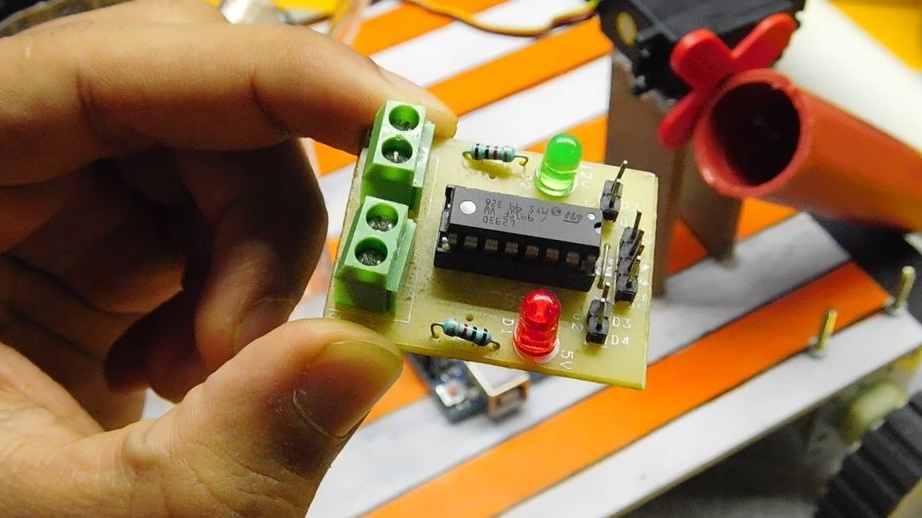
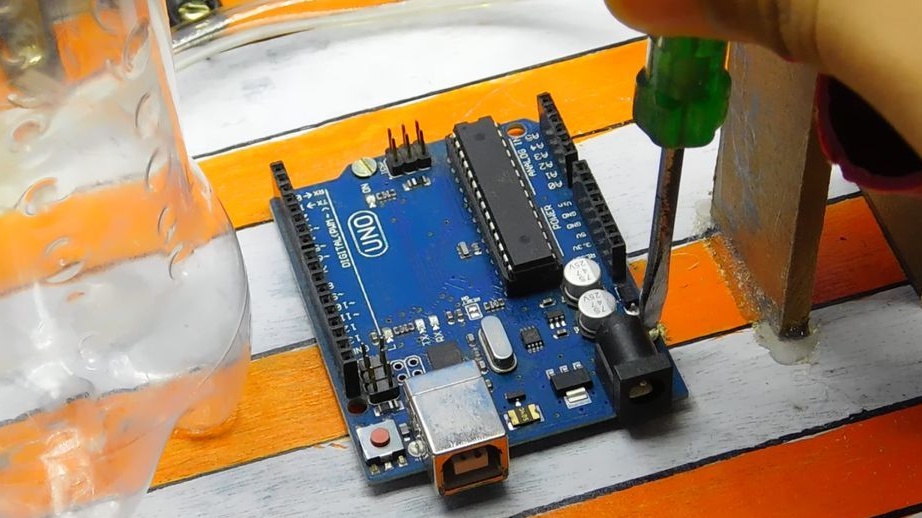
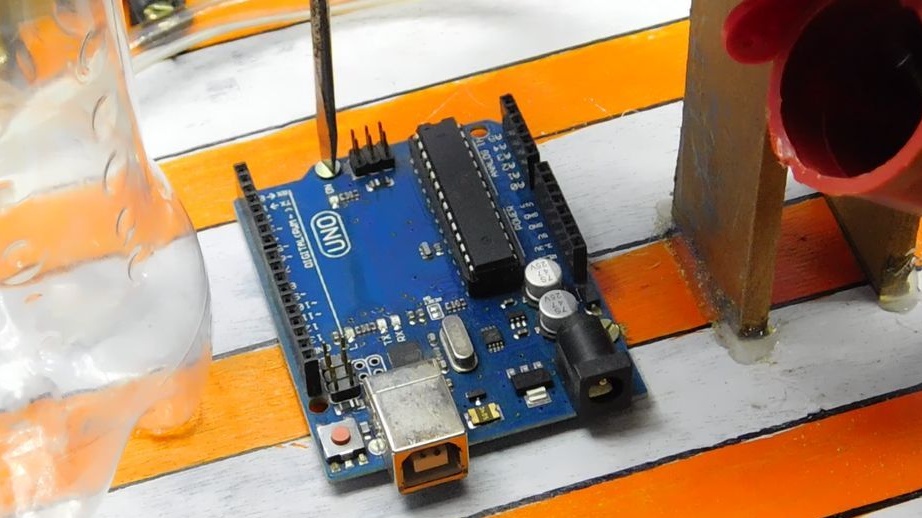
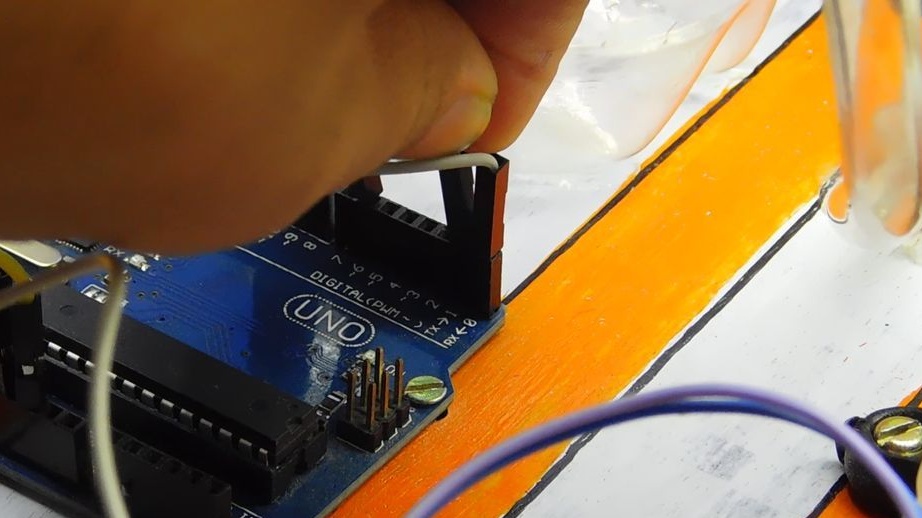
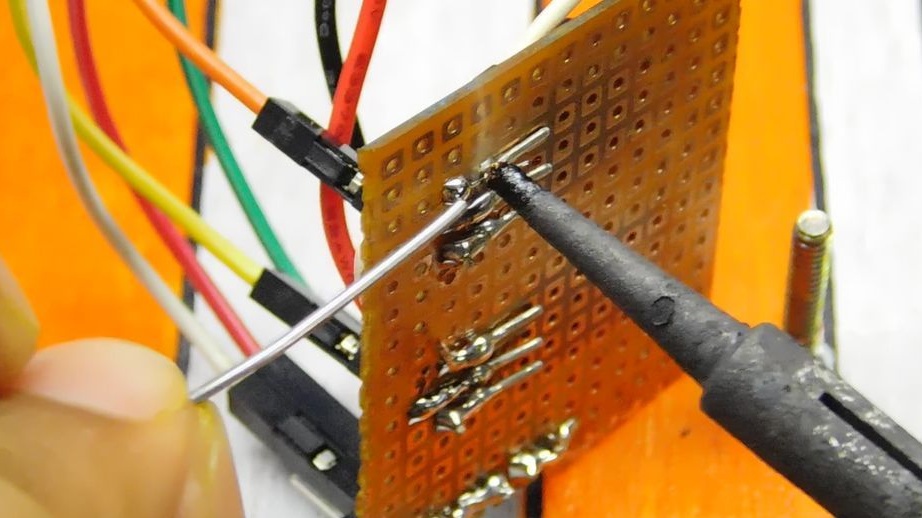
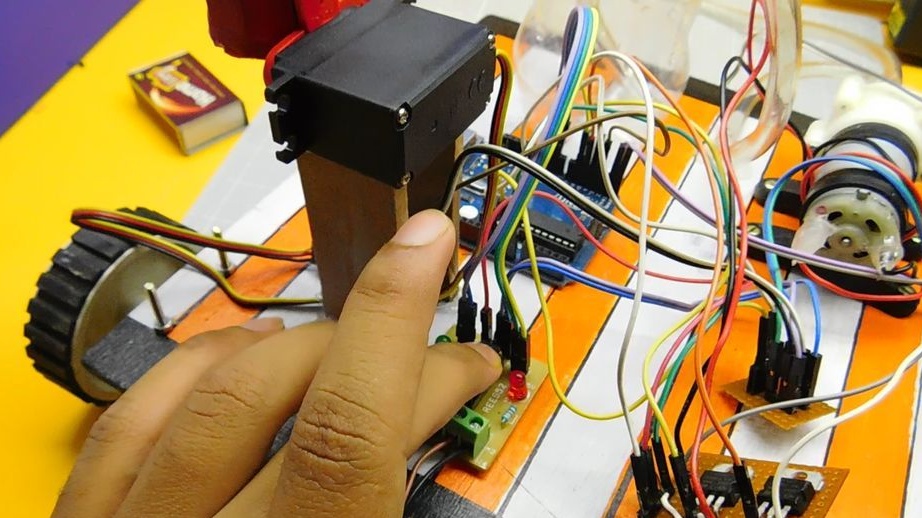
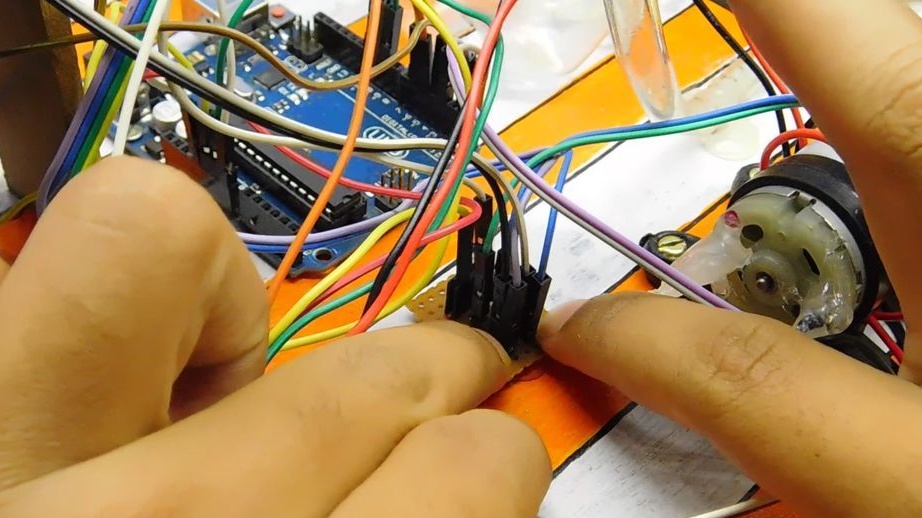
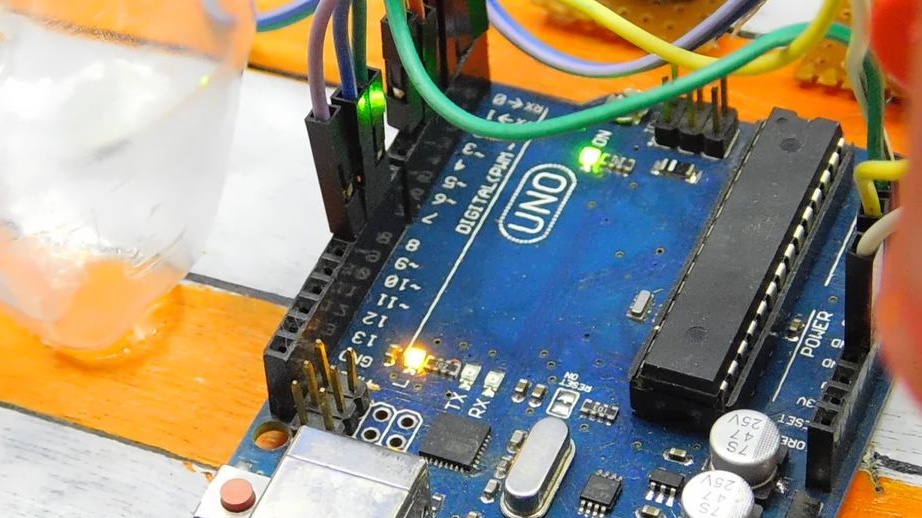
ขั้นตอนที่ห้า: การติดตั้งวงจร Arduino
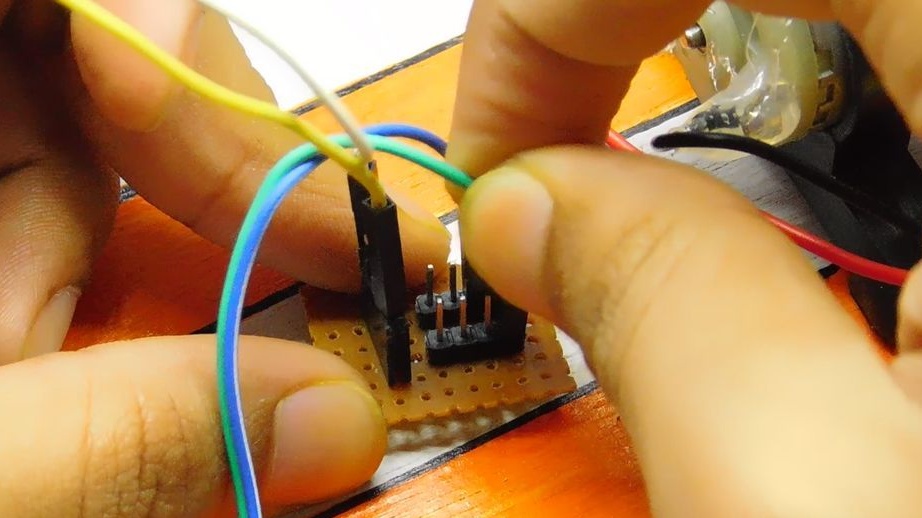
ยึด Arduino กับแพลตฟอร์มและเชื่อมต่ออุปกรณ์ไฟฟ้าเข้ากับบอร์ด
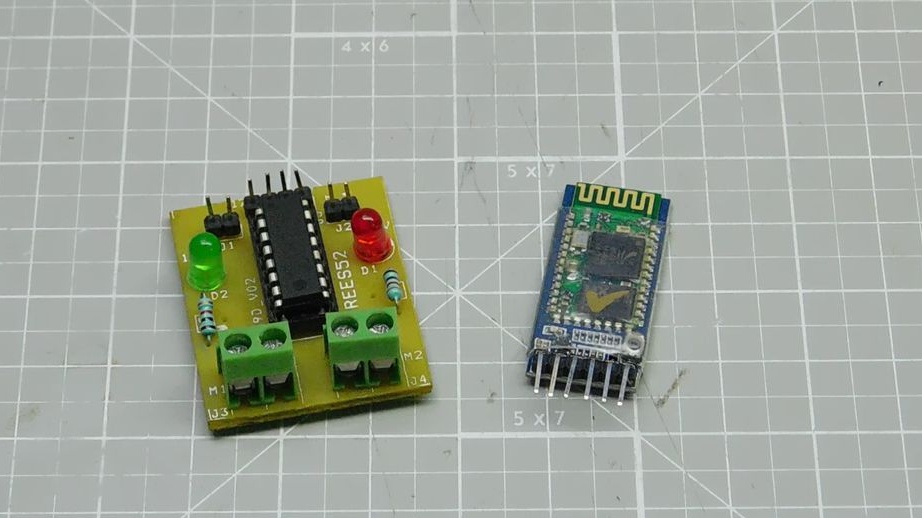
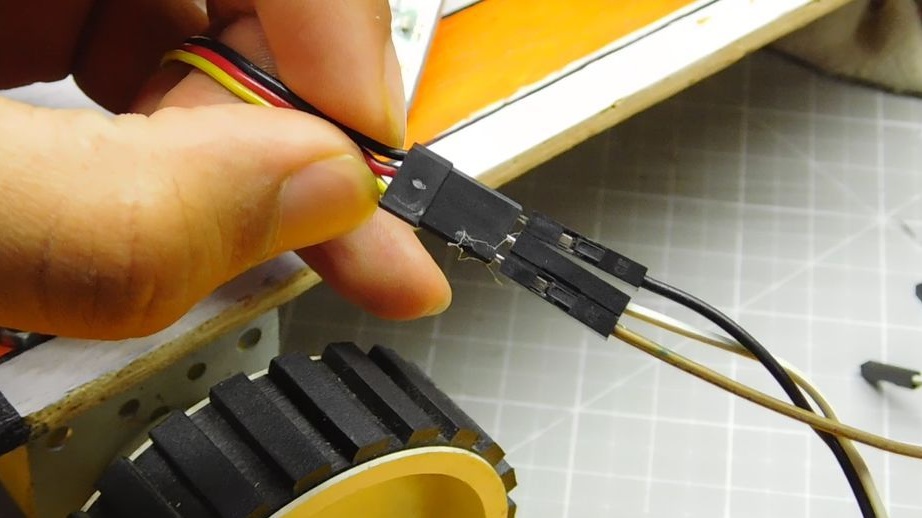
โมดูลควบคุมเครื่องยนต์
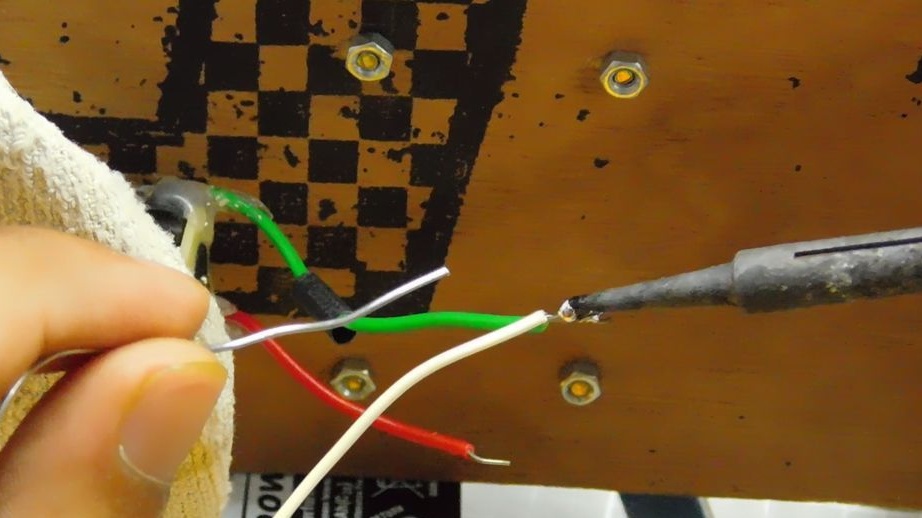
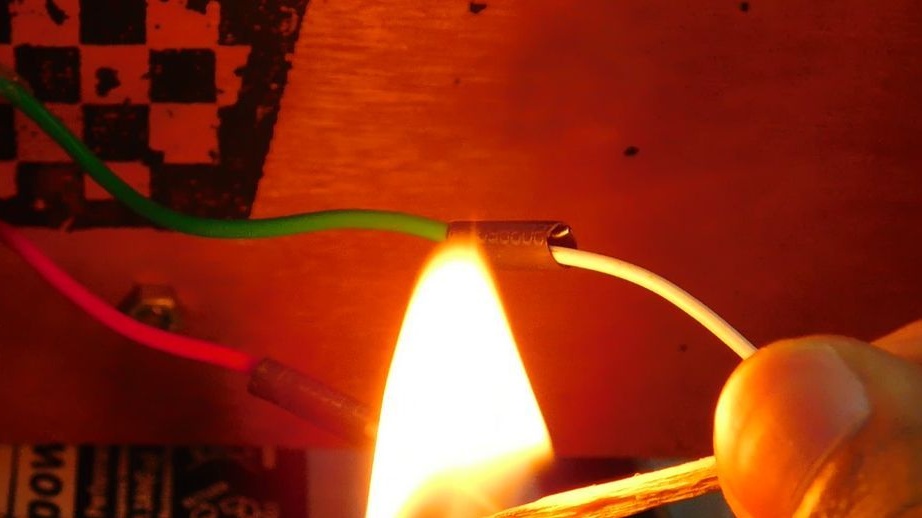
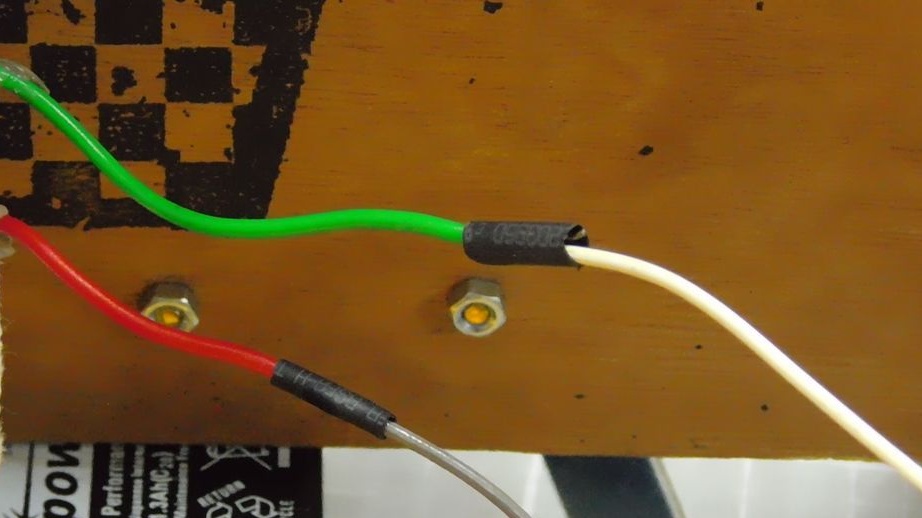
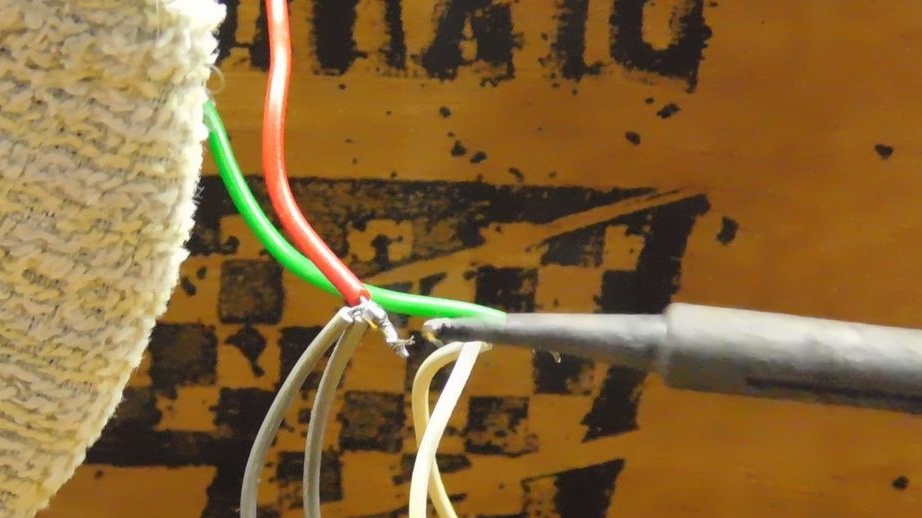
สายต่อของทหาร (ซึ่งล้อถูกกำหนดไว้สำหรับการเคลื่อนไหวไม่ใช่แปรง) สาย ยึดสายไฟในซ็อกเก็ตการติดตั้งโมดูล จากนั้นเชื่อมต่อโมดูลเข้ากับ Arduino ดังนี้
โมดูล ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
GND -Gnd
+ โมดูล 12V จะเชื่อมต่อกับแบตเตอรี่
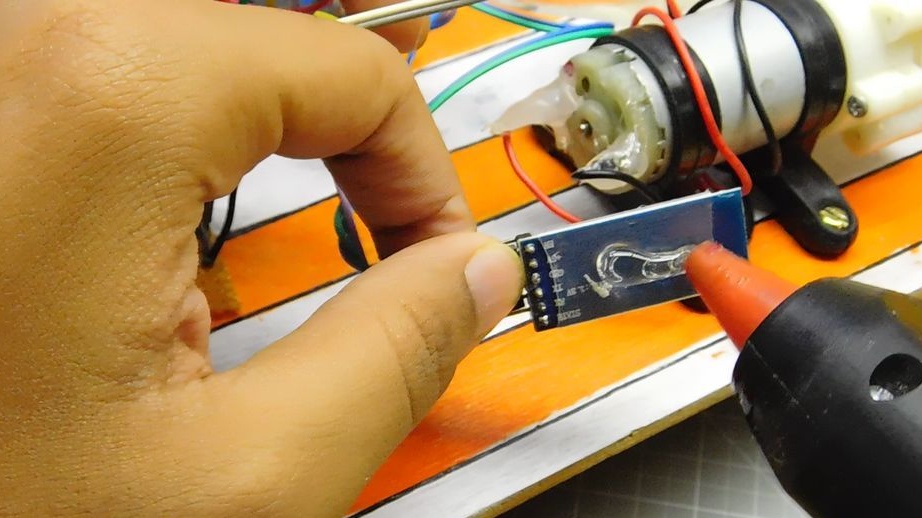
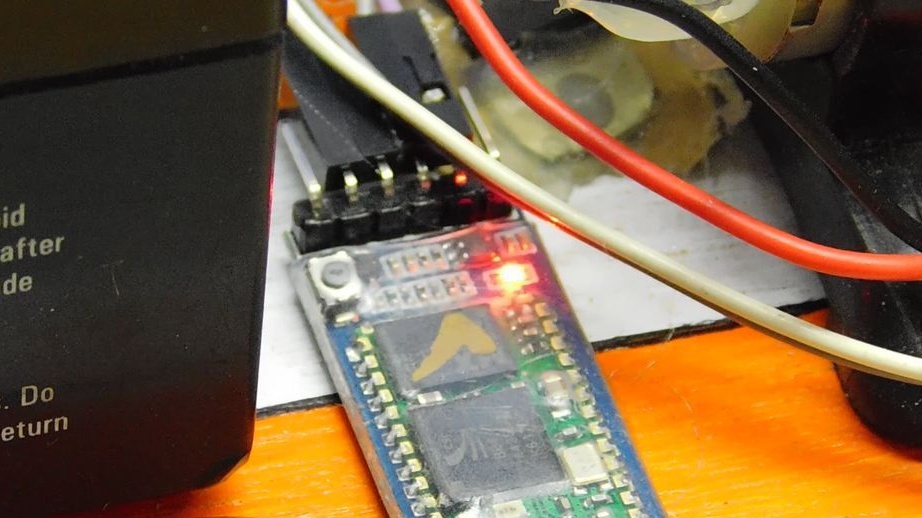
การเชื่อมต่อบลูทู ธ
บลูทู ธ ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
เซอร์โวมอเตอร์ ::: Arduino
Vcc - + 5V
Gnd - gnd
สัญญาณ - D3
จากนั้นจะเชื่อมต่อปั๊มและมอเตอร์แปรงตามรูปแบบ มอเตอร์แปรงมีการเชื่อมต่อแบบขนานและหมุนในทิศทางต่าง ๆ ตามเข็มนาฬิกาขวาและซ้ายทวนเข็มนาฬิกา

ขั้นตอนที่หก: รัดชิ้นส่วนหุ่นยนต์
ค็อกเทลสองหลอดแต่ละหลอดยาวประมาณ 7 ซม. ใส่หลอดลงในท่อจ่ายน้ำ ยึดหลอดหน้าแปรง

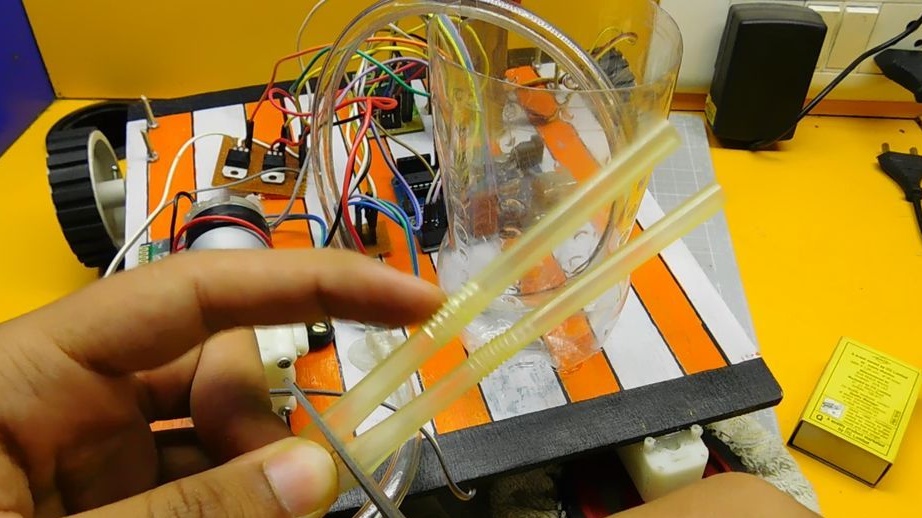
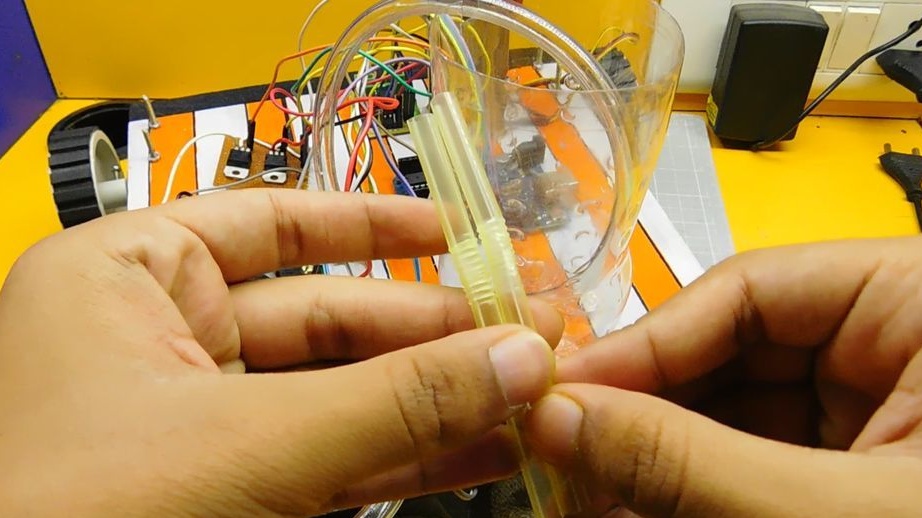
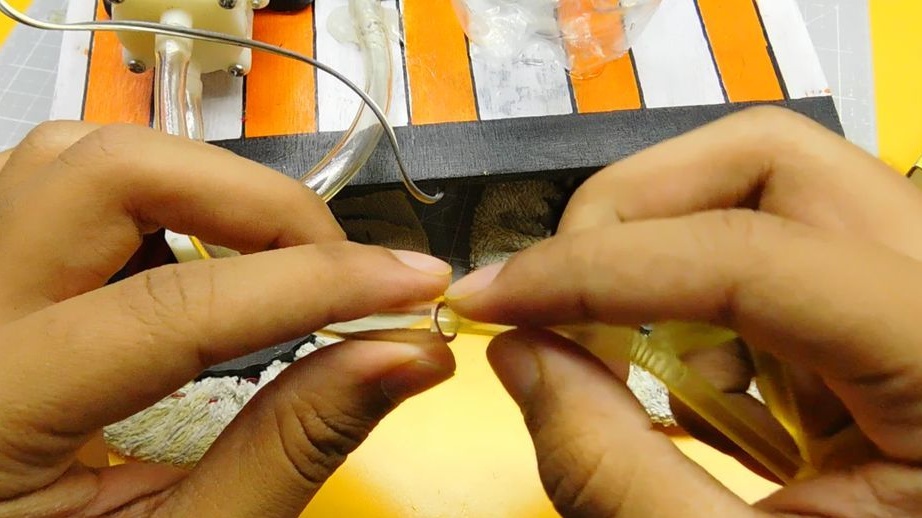

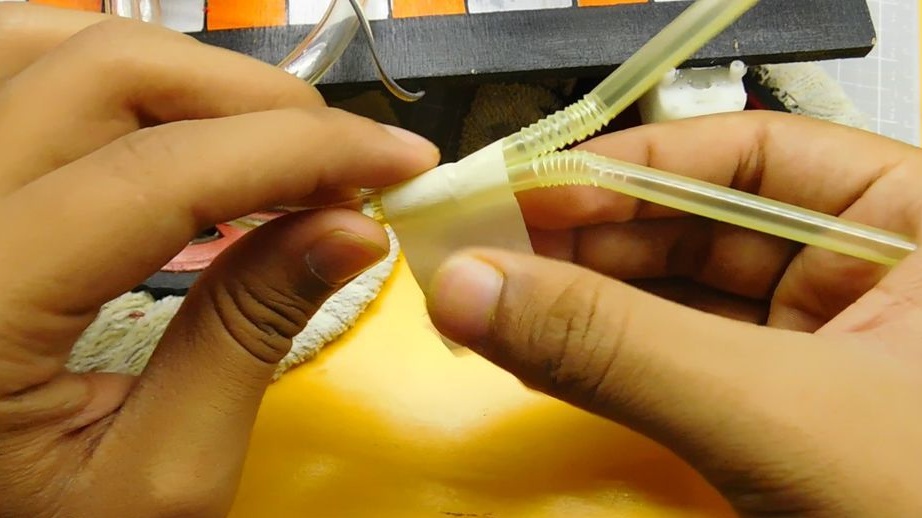


ล็อคบนแพลตฟอร์ม อิเล็กทรอนิกส์ ส่วนประกอบ

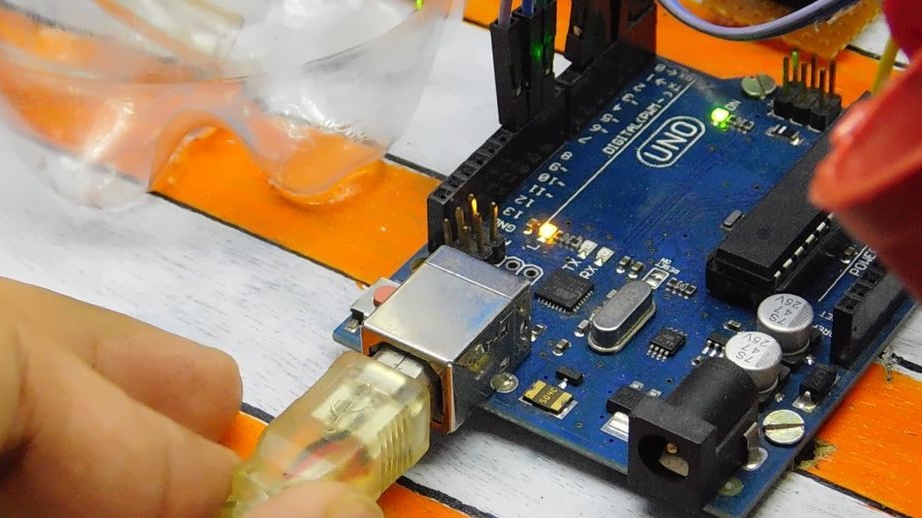
ขั้นตอนที่เจ็ด: ดาวน์โหลดรหัส
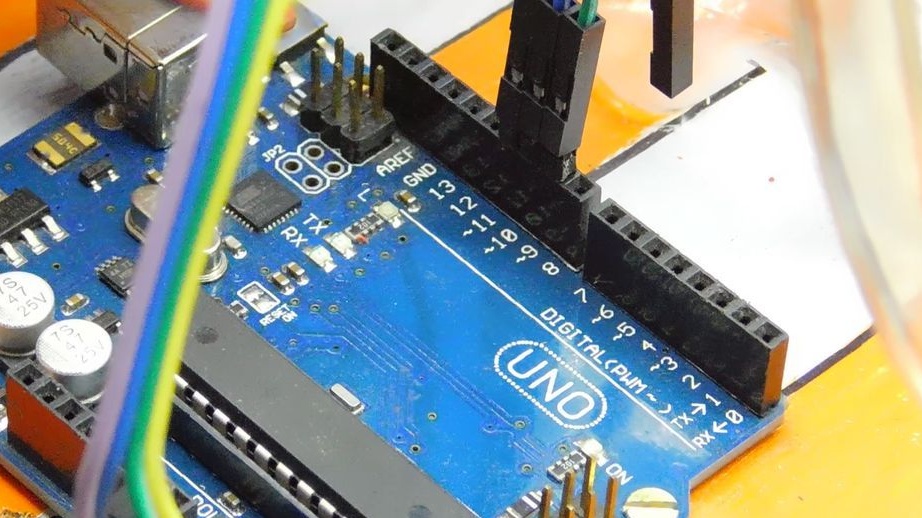
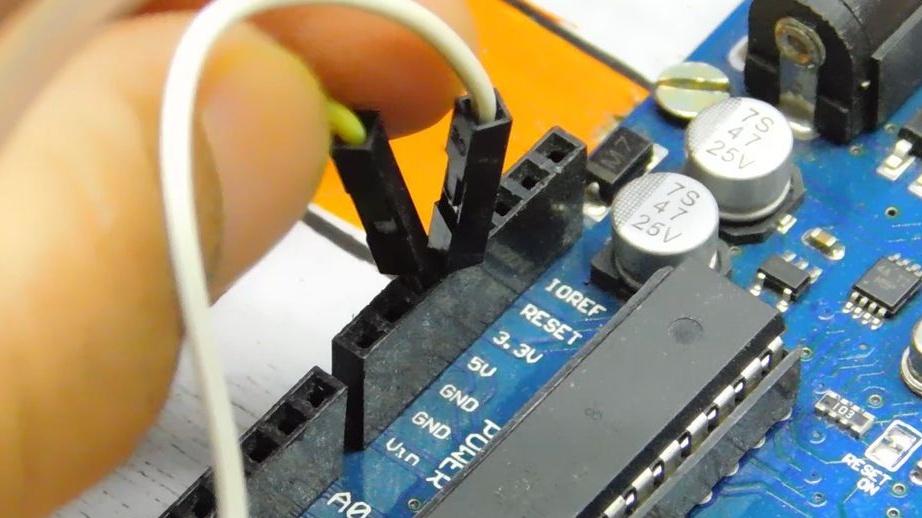
ลบจัมเปอร์ Rx และ Tx ออกจากบอร์ด Arduino เชื่อมต่อบอร์ดกับคอมพิวเตอร์ โหลดรหัส ชุดจัมเปอร์ในสถานที่ .
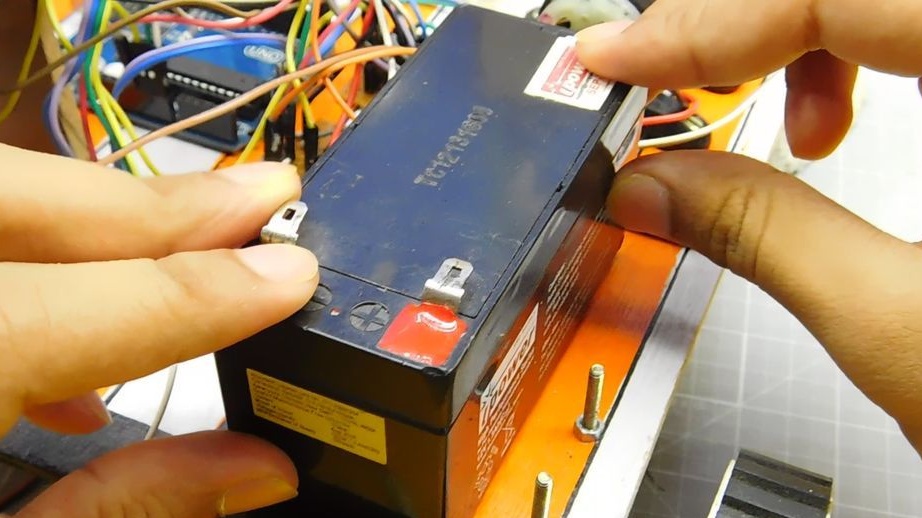
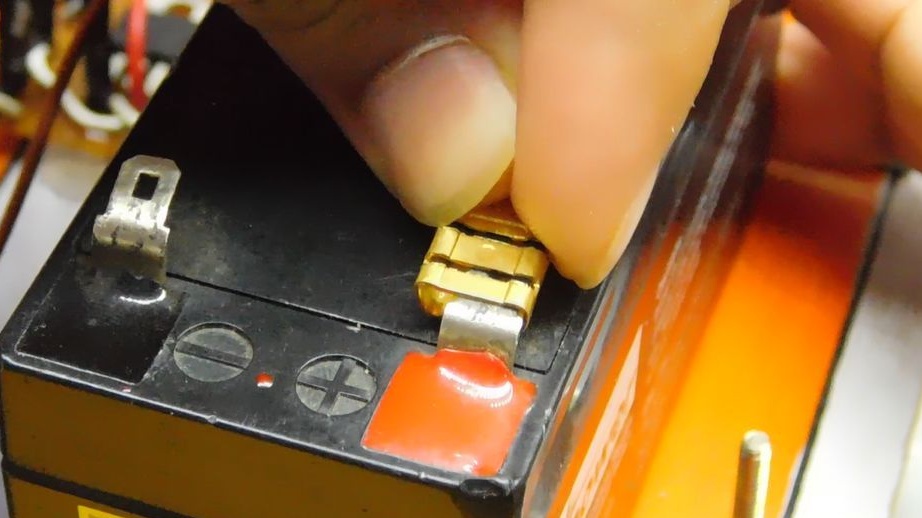
ขั้นตอนที่แปด: แบตเตอรี่
ยึดแบตเตอรี่โดยใช้เทปกาวสองหน้าบนแพลตฟอร์ม เชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์เข้ากับแบตเตอรี่ Arduino master แนะนำให้เชื่อมต่อผ่านตัวแบ่งแรงดัน คุณยังสามารถเพิ่มสวิตช์ไปยังวงจร

ขั้นตอนที่เก้า: ควบคุมหุ่นยนต์
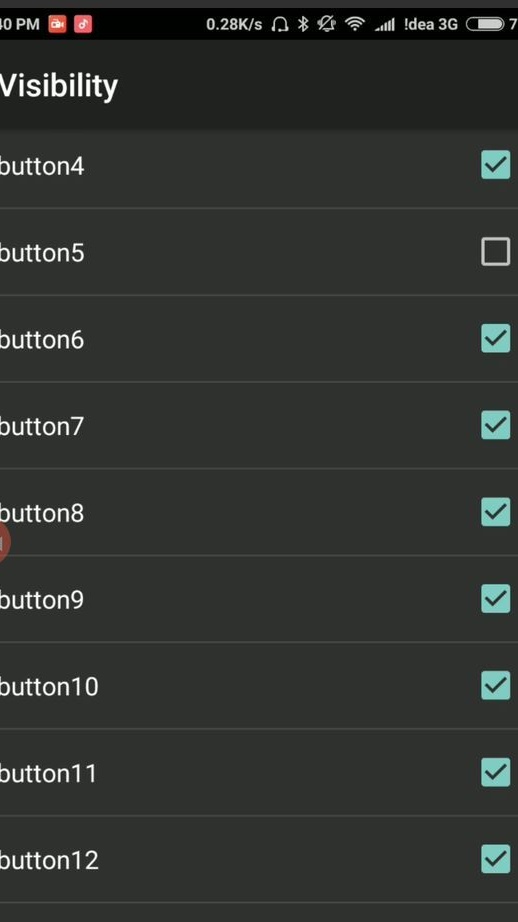
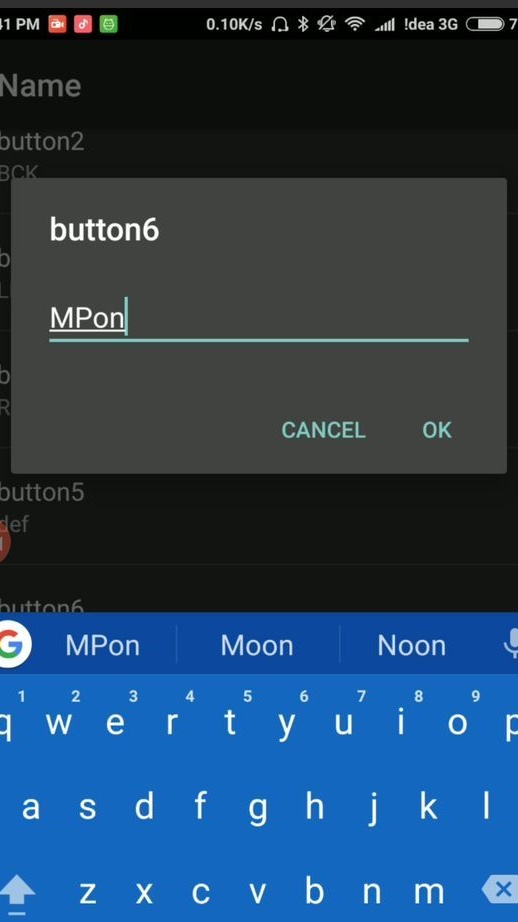
จาก Google Play ตัวช่วยสร้างจะดาวน์โหลดแอปพลิเคชัน 'Bluetooth Serial Controller' เปิดแอปพลิเคชัน ไปที่การตั้งค่า> การมองเห็น ปิดใช้งานปุ่ม 5, 9, 12 ไปที่ชื่อ กำหนดปุ่ม 2-3 ตัวอักษรให้กับแต่ละปุ่ม ดูภาพด้านล่าง
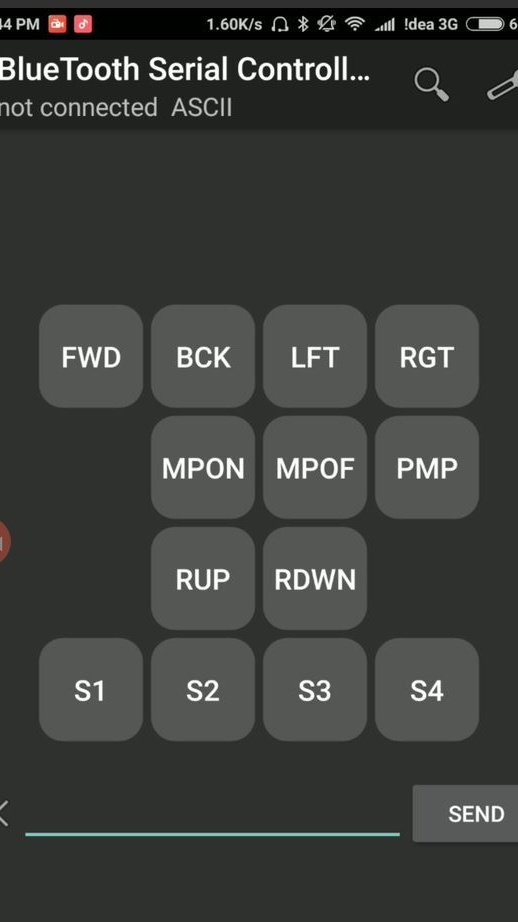
จากนั้นแต่ละปุ่มจะติดตั้งคำสั่ง (ต้องลบเครื่องหมายคำพูดอย่าเปลี่ยนตัวพิมพ์):
ปุ่ม 1 (FWD): 'F'
ปุ่ม 2 (BCK): 'B'
ปุ่ม 3 (LFT): 'L'
ปุ่ม 4 (RGT): 'R'
ปุ่ม 6 (MPON): 'M'
ปุ่ม 7 (MPOF): 'm'
ปุ่ม 8 (PMP): 'P'
ปุ่ม 10 (RUP): 'U'
ปุ่ม 11 (RDWN): 'u'
ปุ่ม 13 (S1): '1'
ปุ่ม 14 (S2): '2'
ปุ่ม 15 (S3): '3'
ปุ่ม 16 (S4): '4'
ในคำสั่งหยุด> คำสั่งกำหนดคำสั่งให้กับปุ่มเหล่านี้เท่านั้น:
ปุ่ม 1: 'S'
ปุ่ม 2: 'S'
ปุ่ม 3: 'S'
ปุ่ม 4: 'S'
ปุ่ม 8: 'p'

ตอนนี้มันยังคงเชื่อมต่อกับโมดูลบลูทู ธ ("HC-05") ใส่รหัสผ่าน (1234 หรือ 0000) และคุณสามารถลองทำความสะอาดห้อง -)))
ขอบคุณอาจารย์ใหญ่และเราต้องการให้เขาปรับปรุงหุ่นยนต์และทำงานอย่างอิสระจากมัน
กระบวนการประกอบทั้งหมดของหุ่นยนต์ล้างสามารถดูได้ในวิดีโอ