

บทความจะพิจารณาตัวอย่างของการสร้างหุ่นยนต์ในตำนานที่ชื่อว่า "Canbot" รายละเอียดจำนวนมากสำหรับหุ่นยนต์นั้นจะถูกพิมพ์ลงบนเครื่องพิมพ์ 3D หุ่นยนต์ถูกควบคุมจากระยะไกล
วัสดุและเครื่องมือสำหรับ ทำที่บ้าน:
- ไมโครคอนโทรลเลอร์ Atmel Attiny85 หนึ่งตัว
- ไมโครไซต์สองตัว HXT900 หรืออะนาล็อก
- แบตเตอรี่ LiPo 3.7V หนึ่งก้อน
- ตัวรับสัญญาณอินฟราเรดหนึ่งตัวที่ 38kHz;
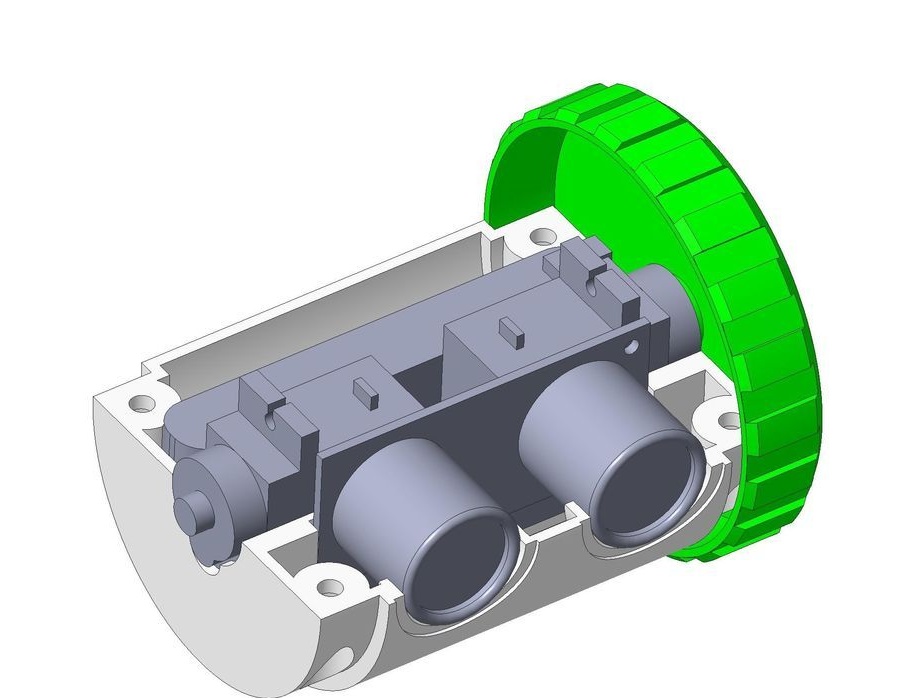
- ประเภท transducer ล้ำเสียง HC-SR04;
- สวิตช์หรือจัมเปอร์ขนาด 9x4 มม. แทน
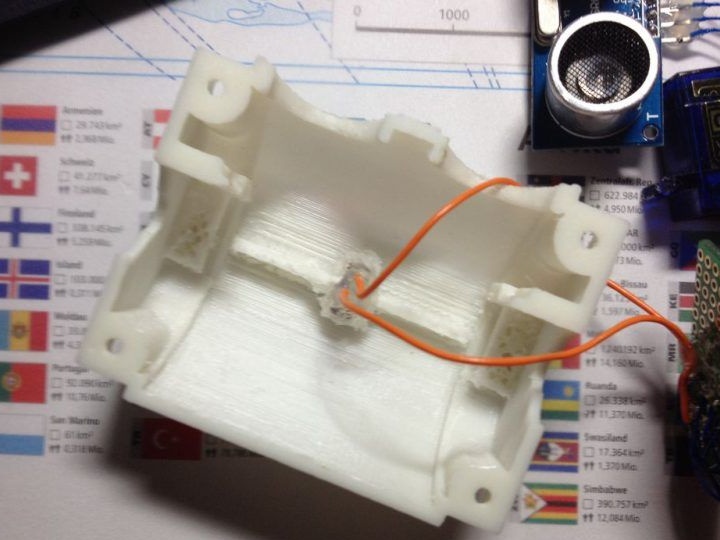
- ส่วน 3D (เป็นไปได้) มันจะใช้เวลาหนึ่งด้านบน (top.stl), ด้านล่างหนึ่ง (bottom.stl) และสองล้อ (wheel.stl)
แน่นอนว่าต้องใช้เครื่องมือบัดกรีกาวร้อนไขควงสกรูสายไฟและสิ่งเล็กน้อยอื่น ๆ

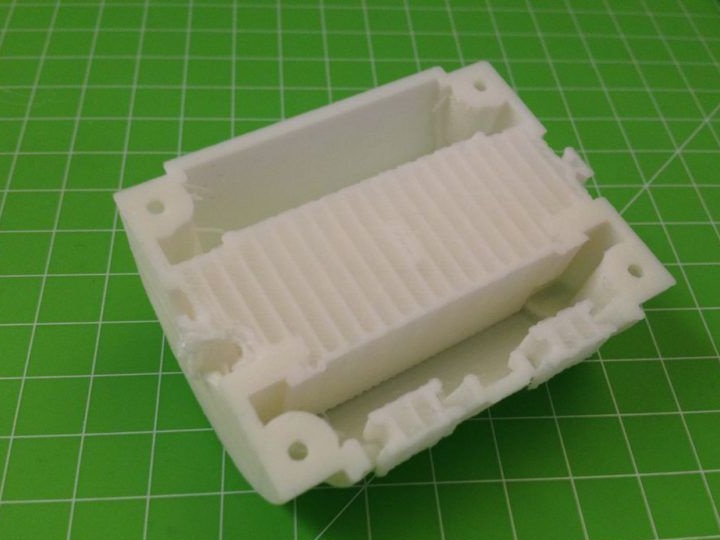
ชิ้นส่วนด้านบนและด้านล่างจะต้องพิมพ์ลงโดยใช้ตัวเลือก“ โครงสร้างรองรับ” ขึ้นอยู่กับชนิดของเครื่องพิมพ์ที่ใช้ชิ้นส่วนที่เสร็จแล้วอาจต้องมีการทำความสะอาดในตอนท้าย
กระบวนการผลิตของหุ่นยนต์:
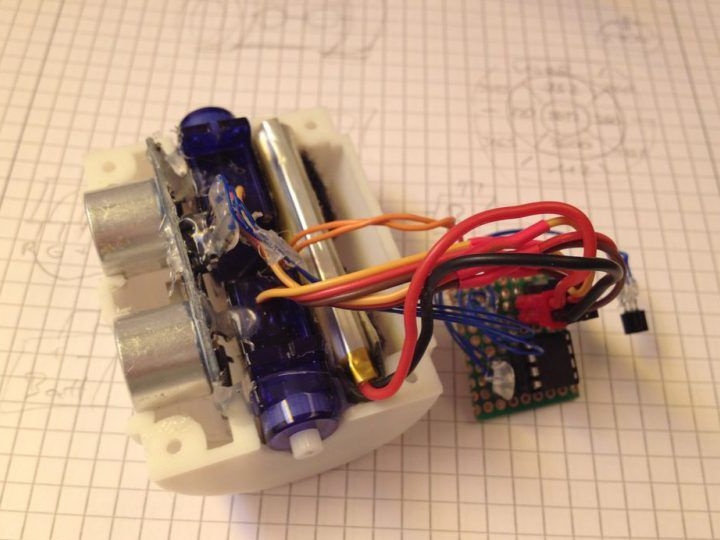
ขั้นตอนแรก อิเล็กทรอนิกส์ ส่วนหนึ่งของหุ่นยนต์
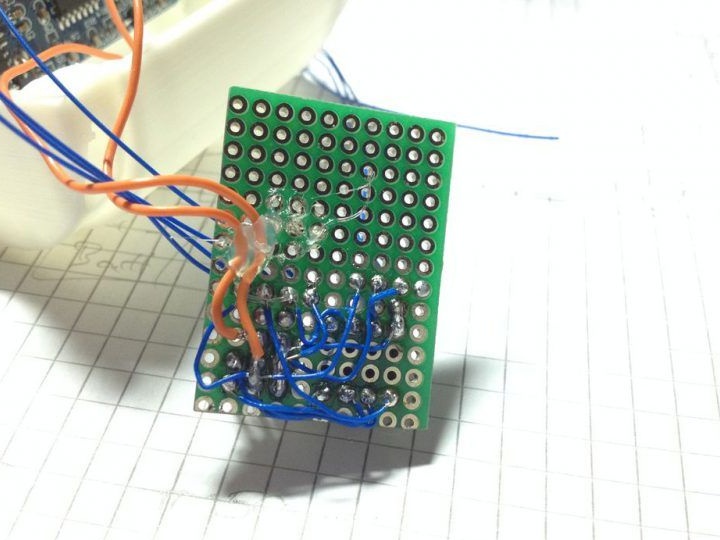
ก่อนอื่นคุณต้องกำหนดค่าเซอร์โวพวกเขาจะต้องแปลงเป็นการหมุนอย่างต่อเนื่อง วิธีการทำเช่นนี้มีคำแนะนำมากมายบนอินเทอร์เน็ต ถ้าอย่างนั้นองค์ประกอบอิเล็กทรอนิกส์ทั้งหมดจะต้องมีการประกอบตามที่ระบุไว้ในแผนภาพ ในการประกอบชิ้นส่วนอิเล็คทรอนิกส์นั้นสะดวกคุณสามารถนำชิ้นส่วนเล็ก ๆ ของเขียงหั่นขนมและสายไฟบาง ๆ


ขั้นตอนที่สอง ส่วนซอฟต์แวร์ของหุ่นยนต์
หากคุณเข้าใกล้กระบวนการสร้างหุ่นยนต์ที่มีความเป็นมืออาชีพมากที่สุดคุณสามารถเขียนส่วนของซอฟต์แวร์ได้อย่างอิสระ แต่สำหรับสิ่งนี้คุณจะต้องเรียนรู้ภาษาการเขียนโปรแกรม ในเวอร์ชันที่ง่ายกว่านี้คุณสามารถดาวน์โหลดโค้ดสำเร็จรูปและเพียงอัปโหลดไปยังไมโครคอนโทรลเลอร์
ตามที่ผู้เขียนที่ดีที่สุด หุ่นยนต์ รับสัญญาณอินฟราเรดจากรีโมทควบคุมยี่ห้อ Sony ในอนาคตมันจะจำเป็นต้อง "reflash" ส่วนรหัส Arduino และส่งออกข้อมูลผ่านฟังก์ชั่น Serial.print () ดังนั้นจึงเป็นไปได้ที่จะทราบว่าการเข้ารหัสคืออะไรในแต่ละปุ่ม
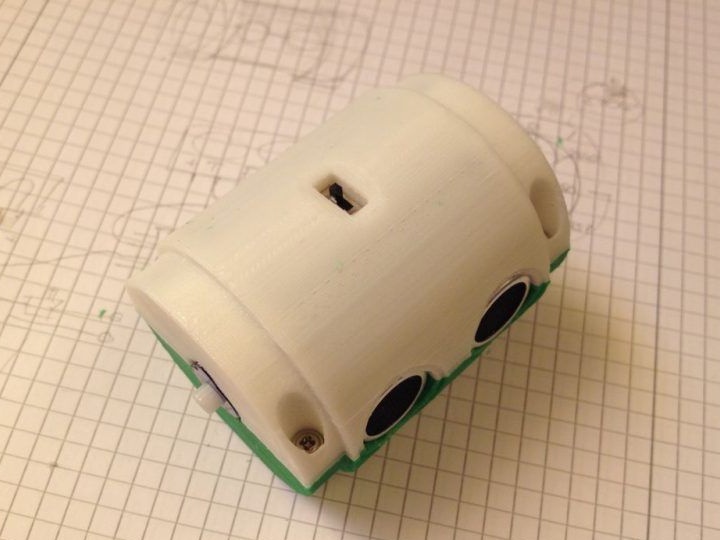
ขั้นตอนที่สาม ขั้นตอนสุดท้าย ประกอบหุ่นยนต์
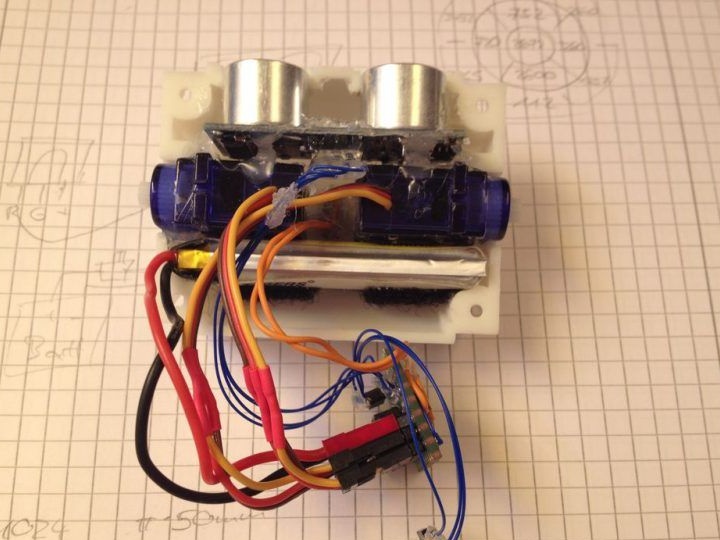
สรุปแล้วหุ่นยนต์กำลังจะไป สำหรับวัตถุประสงค์เหล่านี้คุณจะต้องใช้กาวร้อน ด้วยคุณจะต้องแก้ไขสายไฟเพื่อไม่ให้สายหลุดเมื่อหุ่นยนต์เคลื่อนที่นอกจากนี้ยังจำเป็นต้องแก้ไขสวิตช์และแก้ไขเซ็นเซอร์อัลตราโซนิคด้วย โดยสรุปฝาครอบของหุ่นยนต์จะเชื่อมต่อโดยใช้สกรูสี่ตัวหากจำเป็นก็สามารถถอดประกอบได้อย่างง่ายดาย โดยวิธีการสกรูสำหรับเซอร์โวที่สมบูรณ์แบบสำหรับการติดตั้ง

นั่นคือทั้งหมดตอนนี้หุ่นยนต์เกือบจะพร้อมแล้ว มันยังคงติดตั้งล้ออยู่บนเพลาของเซอร์โวมอเตอร์และคุณสามารถเริ่มทดสอบหุ่นยนต์ได้ คุณสามารถดูรายละเอียดเพิ่มเติมว่าโฮมเมดทำงานอย่างไรกับวิดีโอ