ในระหว่างการศึกษาของเขาผู้เขียนเล่นเกมด้วยการสนับสนุน accelerometer บนโทรศัพท์ของเขา เขาชอบขับรถทางโทรศัพท์เพียงแค่เอียงและจากนั้นเขาก็เริ่มฝันที่จะสร้างรถที่มีการควบคุมเหมือนกันในชีวิตจริง ตอนนี้มี Arduino และหลังจากได้รับทักษะการเขียนโปรแกรมก็ถึงเวลาสร้างเครื่องที่จัดการบน Android เขาเรียกมันว่า Hercules
เธอได้รับชื่อนี้เนื่องจากแรงบิดสูงและความเร็วสูง แบบ สามารถควบคุมได้โดยใช้โทรศัพท์ Android ผ่านบลูทู ธ โทรศัพท์ทุกเครื่องที่มีระบบปฏิบัติการนี้เหมาะสำหรับการควบคุมผู้เขียนไม่ได้ จำกัด การควบคุมระยะไกล อีกทั้งการใช้โทรศัพท์ช่วยประหยัดเงินเพราะฉันไม่ต้องใช้เงินในการสร้างรีโมตคอนโทรล
วัสดุและเครื่องมือ:
- Arduino Uno
- ตัวรับส่งสัญญาณบลูทู ธ
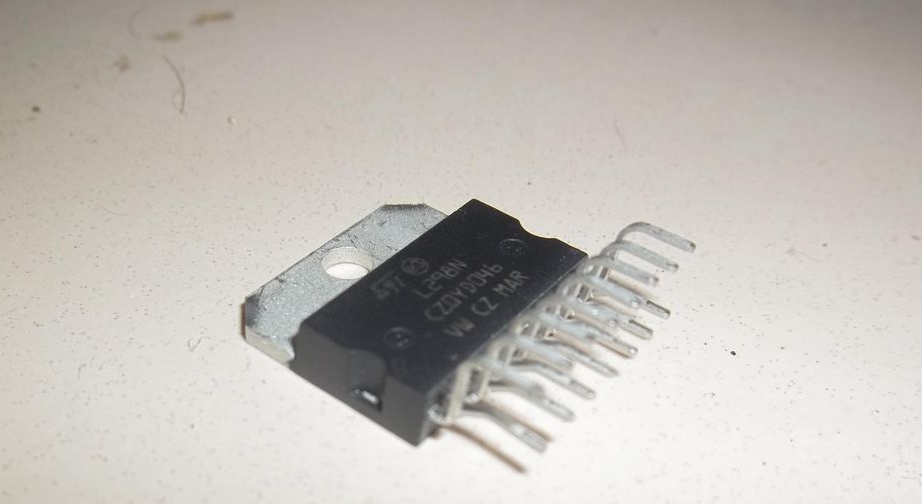
- ตัวขับเครื่องยนต์คู่ (พร้อม L298 H-bridge)
- มอเตอร์พร้อมเกียร์ 4 ชิ้น (เลือกกำลังไฟได้ตามการใช้งานของเครื่อง)
- ล้อรถ 4 ชิ้น
- แบตเตอรี่ 1Ah SLA 12V
- ฐานสำหรับส่วนประกอบ (แชสซี)
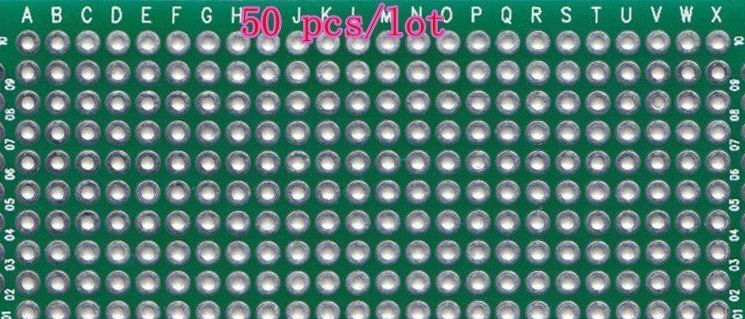
- เขียงหั่นขนม
- กล่องสำหรับที่อยู่อาศัย 4 ชิ้น
- สวิตช์ SPST
- สายเชื่อมต่อสำหรับ Arduino
- ลวดบัดกรี
- ถั่วและสกรูที่มีขนาดเล็ก
- ตัวต้านทาน 10 kOhm 1 ชิ้น
- ตัวต้านทาน 20 kOhm 1 ชิ้น
- โทรศัพท์ Android
- หัวแร้ง
- ประสาน
- วางประสาน
- สว่าน





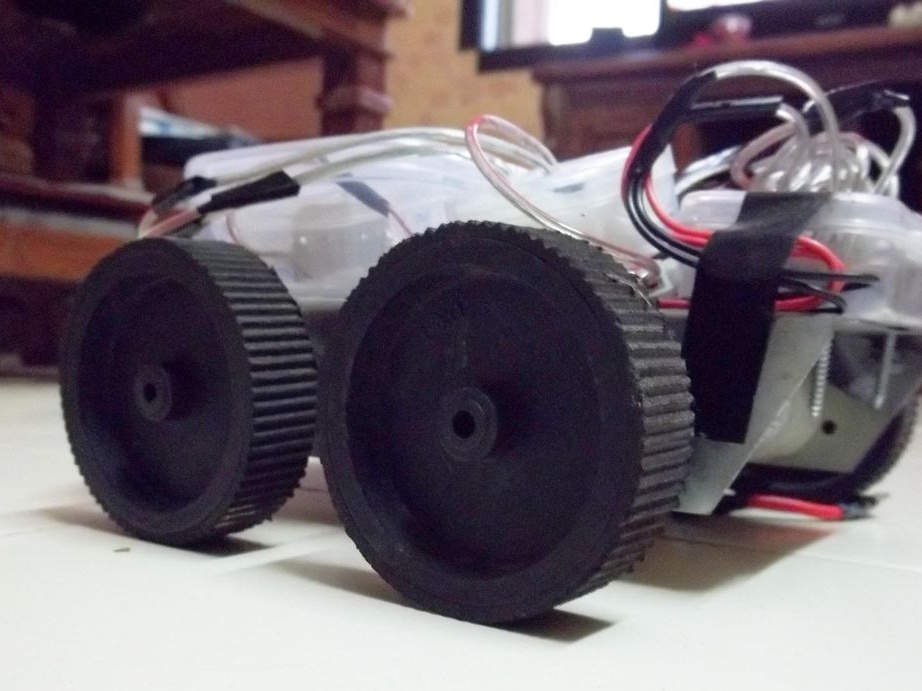
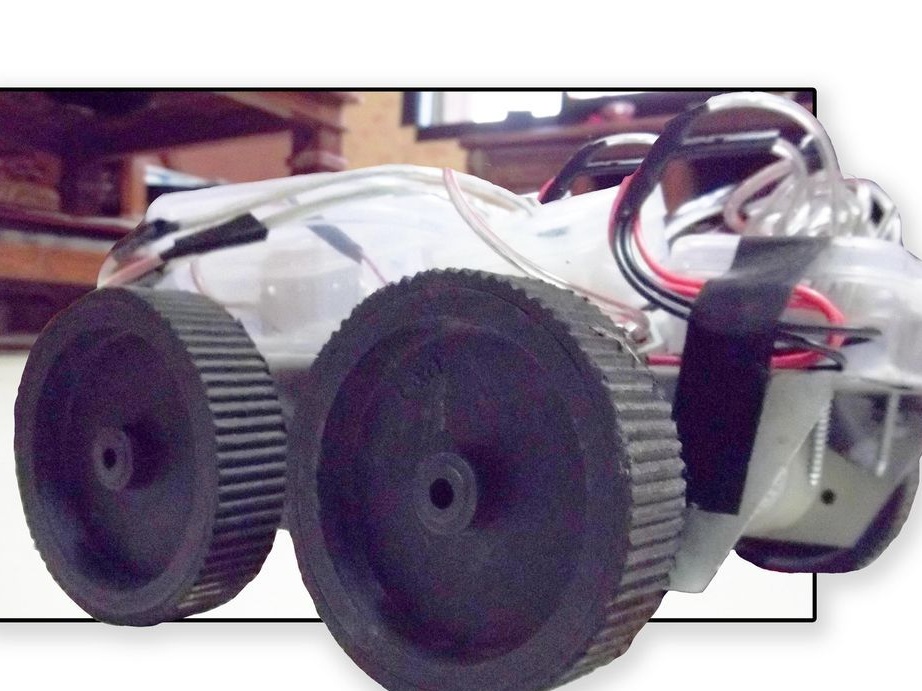
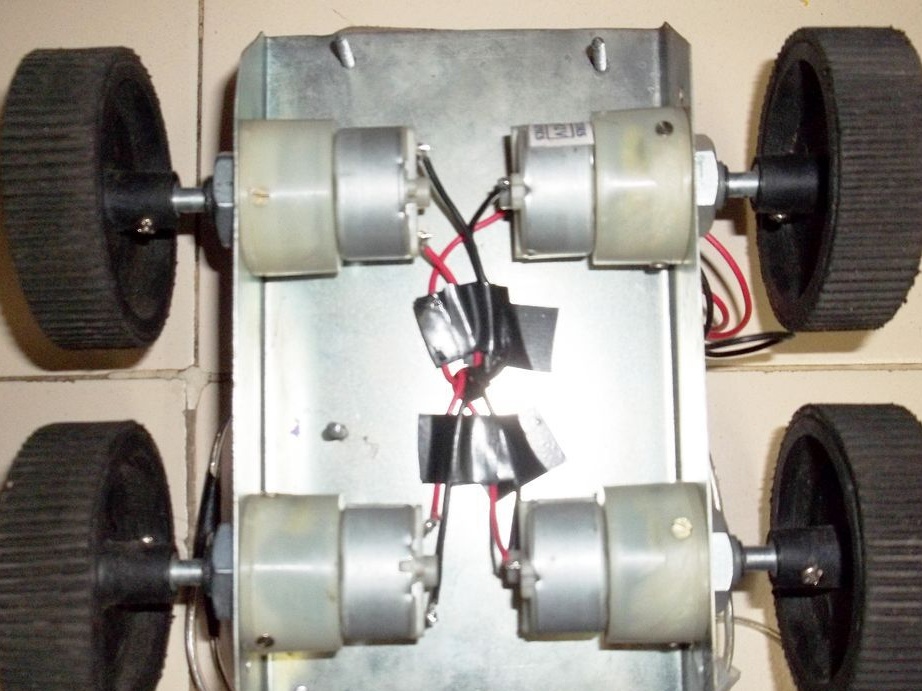
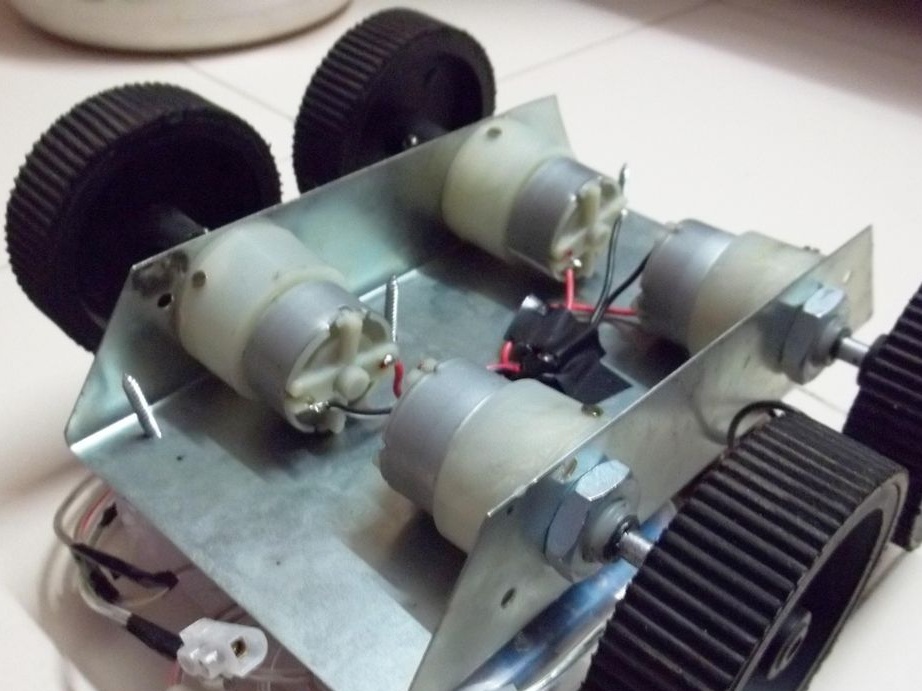
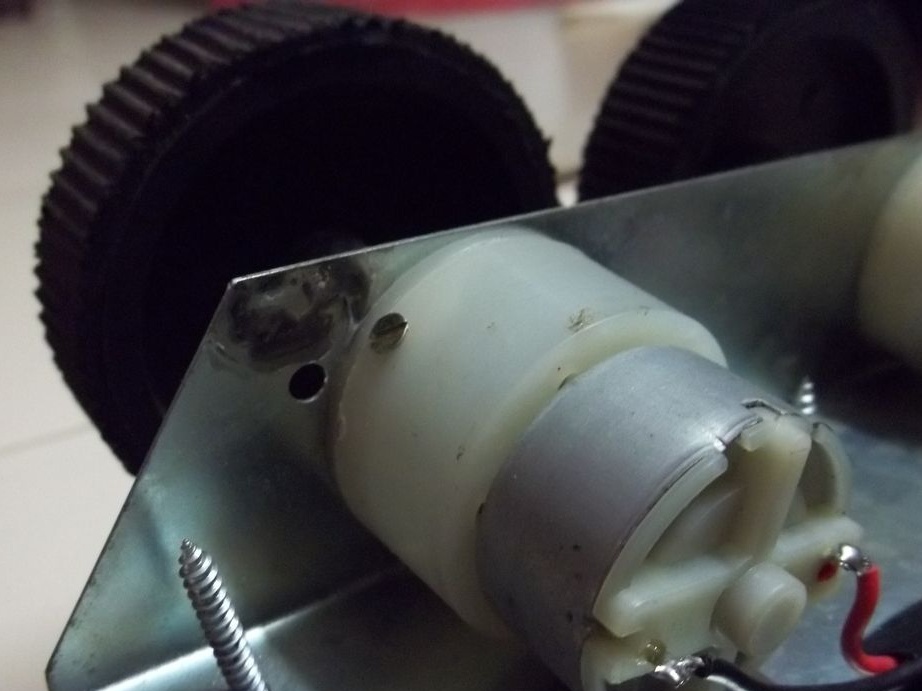
ขั้นตอนแรก ล้อและตัวถัง
สกรูของเครื่องยนต์ทำให้ง่ายต่อการติดตั้งลงบนตัวเครื่องโดยใช้น็อต ล้อถูกติดตั้งไปจนถึงเพลาเครื่องยนต์ มอเตอร์ด้านขวาสองตัวจะเปิดพร้อมกันพร้อมกับมอเตอร์สองตัวที่เหลือ ลักษณะตัวถังหลังจากติดตั้งสี่ล้อและเครื่องยนต์สามารถดูได้ในภาพด้านล่าง
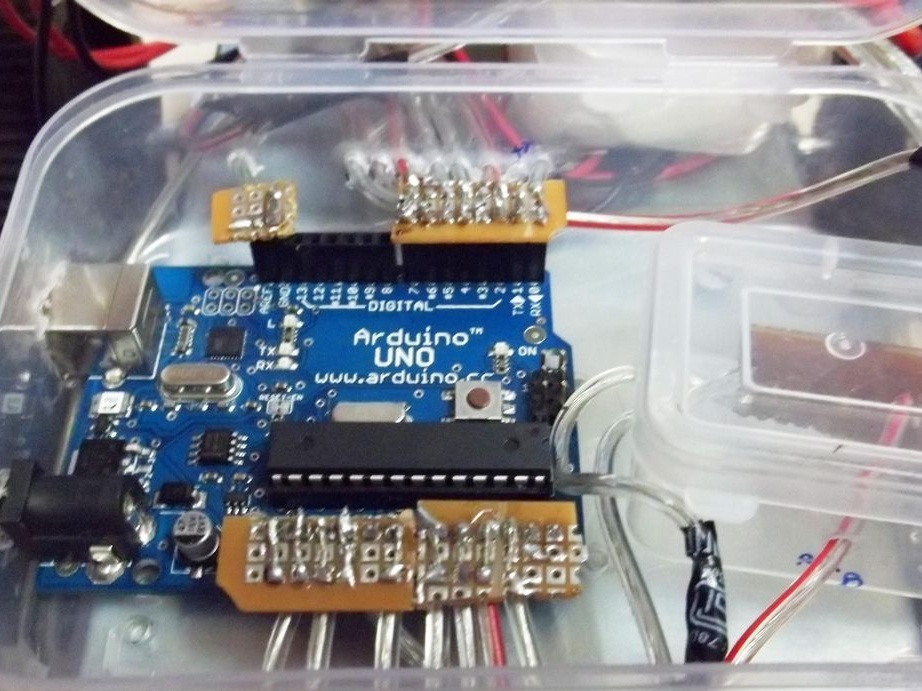
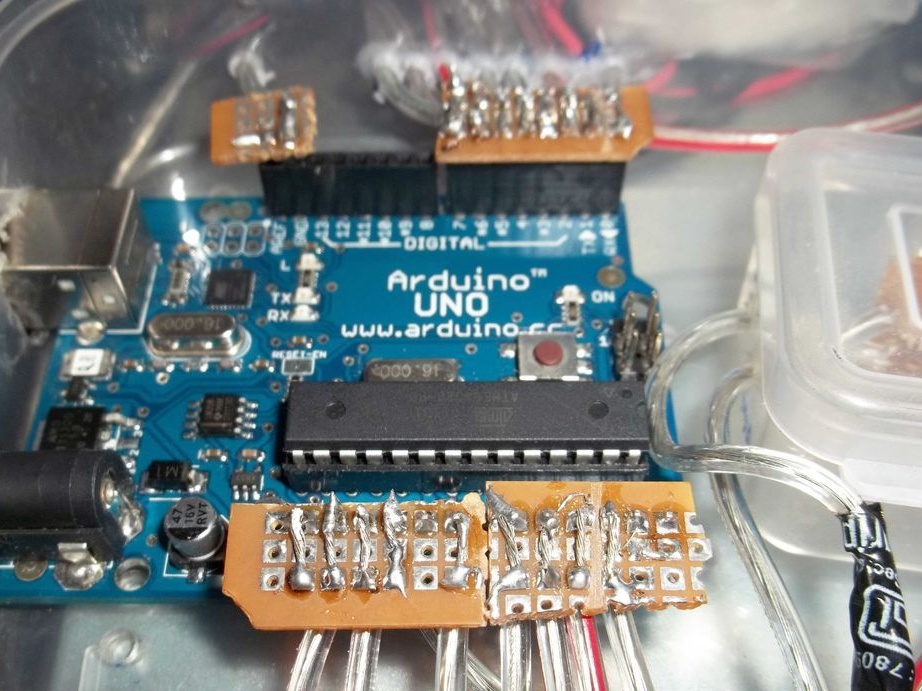
ขั้นตอนที่สอง ที่อยู่อาศัยสำหรับ Arduino
แผนภาพกรณีสำหรับ Arduino แบ่งออกเป็นหลายส่วน โซลูชันการออกแบบแบบแยกส่วนดังกล่าวจะช่วยในอนาคตเพื่อรองรับวงจรหรือกำจัดความผิดปกติที่อาจเกิดขึ้นได้ หากมีส่วนประกอบใดชิ้นหนึ่งแตกหรือไหม้มันก็สามารถเปลี่ยนได้อย่างรวดเร็วและไม่ทำลายการออกแบบ กล่องสำหรับ Arduino ถูกสร้างขึ้นดังนี้:
- สี่ส่วนถูกตัดจากเขียงหั่นขนมสองชิ้นมีรูขนาด 8x3 ส่วนสองส่วน 6x3
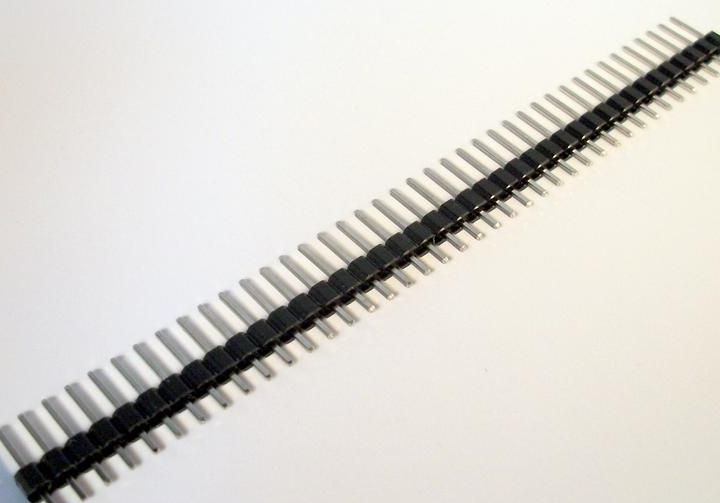
- หมุด BLS ถูกบัดกรีให้แต่ละบอร์ดที่ด้านยาว
- แต่ละขาบนเขียงหั่นขนมถูกบัดกรีด้วยสายไฟอีกประมาณ 10 ซม. ซึ่งทำเพื่อไม่ให้สายไฟหลุดออกจาก Arduino เพราะตอนนี้โหลดเริ่มกระจายอย่างเท่าเทียมกัน
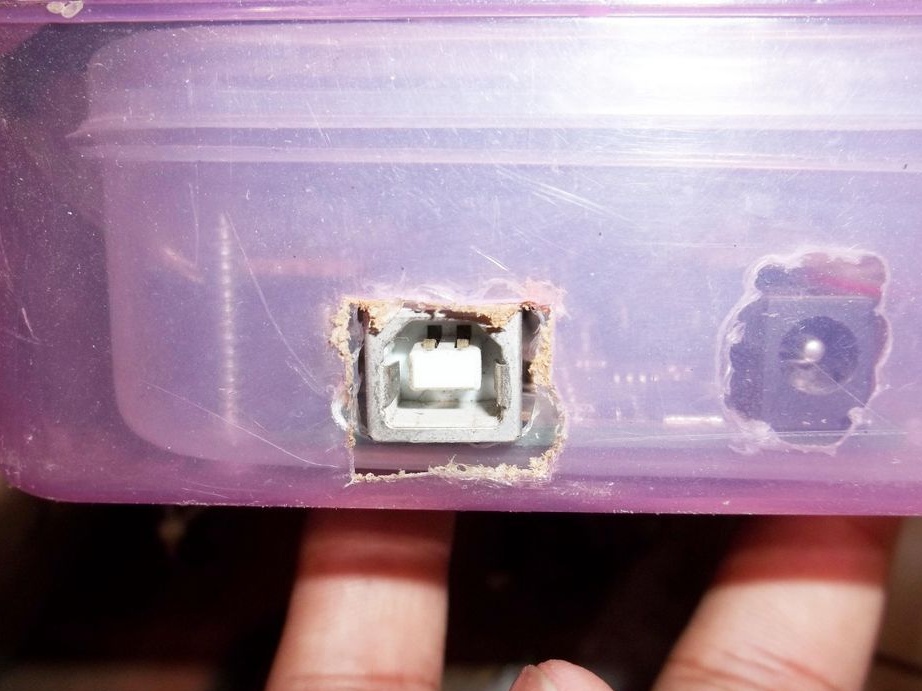
- ถัดไปบอร์ด Arduino ถูกวางไว้ในเคสเพื่อให้เอาท์พุท USB สัมผัสกับกำแพง รูถูกตัดออกสำหรับผลลัพธ์นี้สิ่งนี้จะช่วยในการโหลดโปรแกรมเพิ่มเติมลงในเครื่องหรือทำการแก้ไขโปรแกรมที่มีอยู่ ที่ด้านข้างของกล่องมีการตัดรูสำหรับสายที่จะไปจากบอร์ด มีการตัดรูเพิ่มเติมที่ด้านล่างของกล่องภายใต้ตัวเชื่อมต่อ Arduino


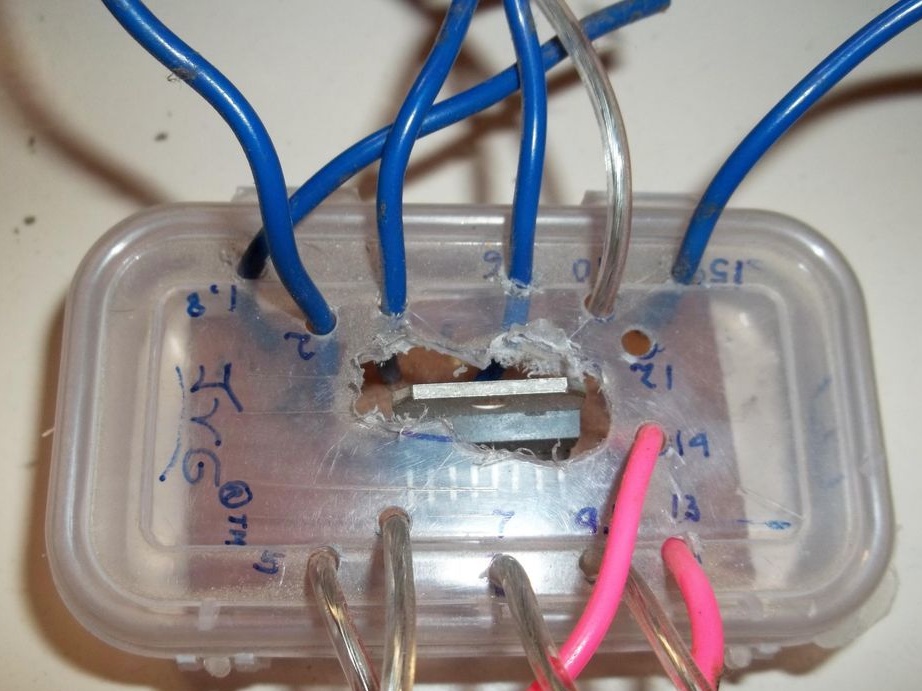
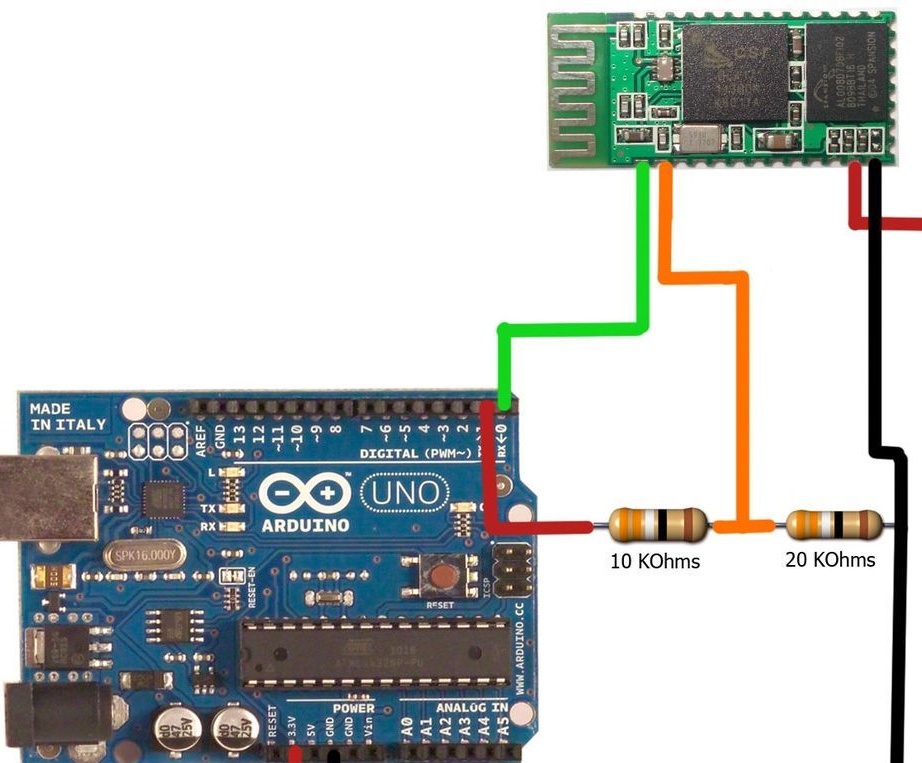
ขั้นตอนที่สาม ตัวรับส่งสัญญาณ Bluetooth
การบัดกรีสายไฟเข้ากับตัวรับส่งสัญญาณบลูทู ธ เป็นงานที่ยากที่สุดในการประกอบโครงการนี้ผู้เขียนขาดมือที่สามเมื่อบัดกรี ใช้ตัวนำความยาว 10 ซม. สี่ตัวพวกเขาถูกบัดกรีเพื่อพิน 1 (Tx), 2 (Rx), 12 (+ 3.3B) และ 13 (GND) ตอนนี้ตัวรับส่งสัญญาณสามารถวางไว้ในที่อยู่อาศัยที่มีรูเตรียมสายไฟไว้ล่วงหน้า ผู้เขียนติดกาวสายไฟลงในกล่องเพื่อป้องกันไม่ให้สายไฟหลุดออกจากหน้าสัมผัส



ขั้นตอนที่สี่ ที่อยู่อาศัยสำหรับตัวต้านทาน
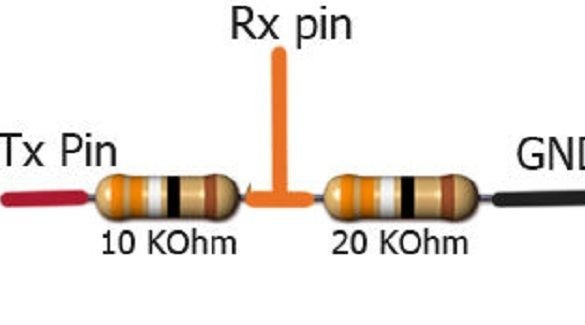
เนื่องจากเอาท์พุท Arduino Tx ส่งสัญญาณที่มีแรงดัน 5V และโมดูลบลูทู ธ ทำงานด้วยแรงดันไฟฟ้า 3.3V จึงจำเป็นต้องแปลง 5V เป็น 3.3V สำหรับงานนี้ผู้เขียนใช้ตัวแบ่งแรงดัน ตามวงจรที่ให้ไว้ด้านล่างเขาบัดกรีตัวต้านทานไปยังชิ้นส่วนที่เหลือของเขียงหั่นขนม แน่นอนว่ามันเป็นไปได้ที่จะวางวงจรนี้ในเคส Arduino แต่มีพื้นที่ไม่เพียงพอดังนั้นผู้เขียนได้สร้างตัวแยกสำหรับตัวต้านทาน


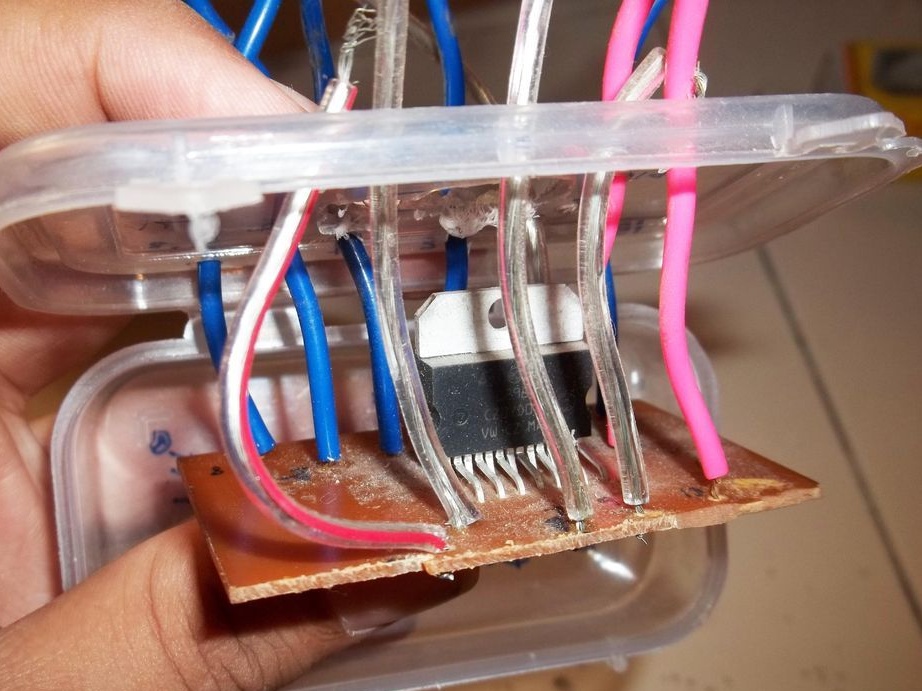
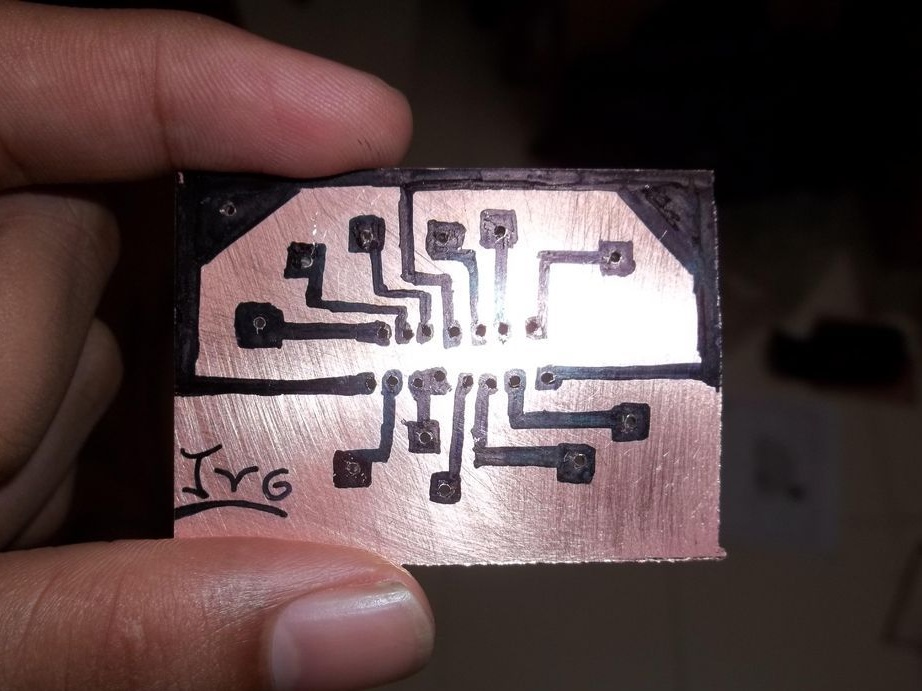
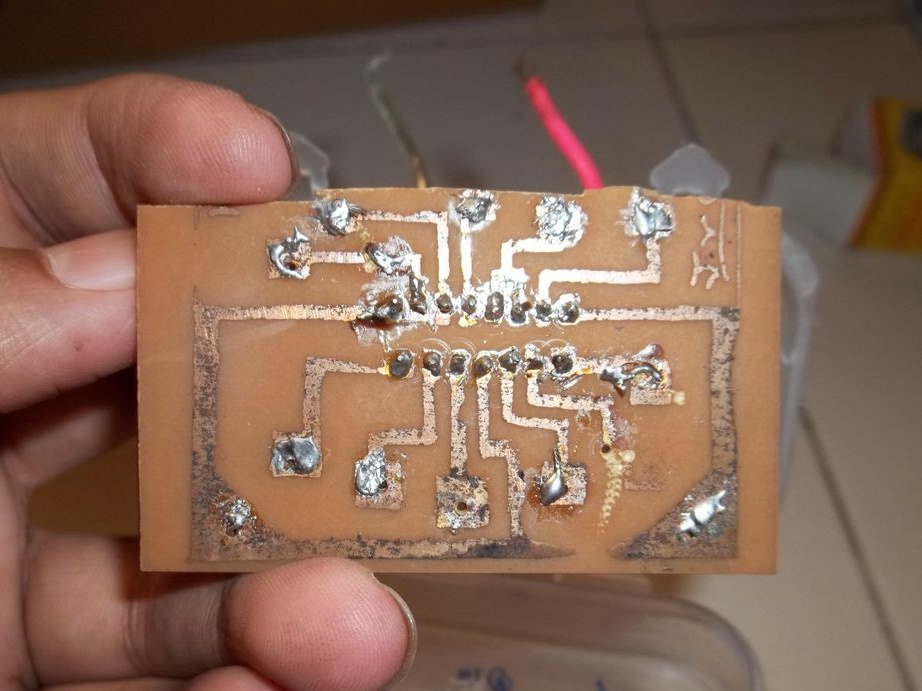
ขั้นตอนที่ห้า ไดรเวอร์เครื่องยนต์
ผู้เขียนใช้ไดร์เวอร์คู่กับ H-bridge L298 IC เขาควบคุมเครื่องยนต์สี่ตัว สำหรับเขาผู้เขียนได้สร้างบอร์ดขึ้นเพื่ออำนวยความสะดวกในการบัดกรีสายไฟให้กับเขาบอร์ดในรูปด้านล่าง หลังจากการบัดกรีไดร์เวอร์ก็ถูกวางไว้ในกล่องแยกพร้อมรูสำหรับสายไฟ
ขั้นตอนที่หก การประกอบขั้นสุดท้าย
แต่ละองค์ประกอบเชื่อมต่อกับ Arduino ตามแบบแผน
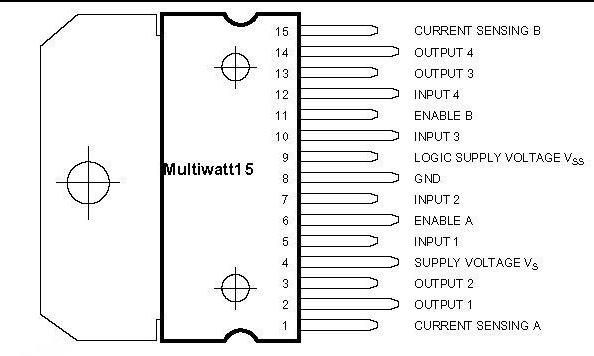
การเชื่อมต่อไดรเวอร์เครื่องยนต์กับ Arduino เกิดขึ้นตามข้อผิดพลาดนี้:
1 ถึง GND
2 ถึงการสัมผัสแรกของมอเตอร์ด้านซ้าย
3 ถึงหน้าสัมผัสที่สองของมอเตอร์ด้านซ้าย
4 ถึงแบตเตอรี่ 12V
5 เพื่อ pin Arduino 2
6 ไปยังขา Arduino 3
7 เพื่อ pin Arduino 4
8 ถึง GND
9 ถึง 5V กับ Arduino
10 เพื่อ pin Arduino 5
11 เพื่อ pin Arduino 6
12 ไปยังขา Arduino 7
13 ถึงการสัมผัสแรกของมอเตอร์ที่เหมาะสม
14 ถึงการสัมผัสครั้งที่สองของมอเตอร์ที่เหมาะสม
15 ถึง GND
พลังงาน 12V เชื่อมต่อกับหมุด Vin Arduino และพิน 4 ของ L298 GND Arduino ตามลำดับกับแหล่งจ่ายไฟ GND
ขั้นตอนที่เจ็ด โปรแกรมสำหรับ Arduino
เพื่อให้โปรแกรมทำงานอย่างถูกต้องจำเป็นต้องติดตั้งไลบรารี Amarino ซึ่งสามารถดาวน์โหลดได้ คุณสามารถดาวน์โหลดซอร์สโค้ดสำหรับ Arduino ภายใต้บทความ
ขั้นตอนที่แปด ซอฟต์แวร์สำหรับ Android
Amarino Library เป็นชุดเครื่องมือสำหรับทำงานกับสมาร์ทโฟน Android โดยการติดตั้งแอปพลิเคชันเพิ่มเติมในโทรศัพท์ของคุณคุณสามารถเริ่มเขียนโปรแกรมได้
สามารถดาวน์โหลดแอปและปลั๊กอินของ Amarino ได้ หลังจากติดตั้งลงในโทรศัพท์แล้วจะยังคงเปิดเครื่องและเชื่อมต่อกับมันเท่านั้นและเลือกส่วนเพิ่มเหตุการณ์ -> เซ็นเซอร์ความเร่ง
วิดีโอพร้อมการติดตั้ง Amarino และปลั๊กอิน:
ความเร็วของเครื่องเท่ากับความเอียงของโทรศัพท์ หากเครื่องเคลื่อนที่ไปในทิศทางที่ผิดคุณจะต้องสลับสายไฟจากเครื่องยนต์