
อันนี้ หุ่นยนต์ ควบคุมโดยบลูทู ธ มาร์ทโฟน มาตรวัดความเร็วของสมาร์ทโฟนวัดมุมของโทรศัพท์ไปทางซ้าย / ขวาขึ้น / ลงใช้ข้อมูลนี้เพื่อคำนวณความเร็วของเครื่องยนต์บอกทิศทางข้อมูลจะถูกส่งผ่านบลูทู ธ ไปยัง Arduino
สิ่งที่คุณต้องสร้างหุ่นยนต์
Arduino uno, HC-06 โมดูลบลูทู ธ , สอง 300 รอบต่อนาที 12 โวลต์มอเตอร์เกียร์, H-bridge L298N Dual H สะพานควบคุมมอเตอร์
12 ถึง 1.3 A แบตเตอรี่กรดตะกั่ว แต่ละเครื่องยนต์ใช้ 0.4A รวมถึงการใช้ลอจิกไดรเวอร์ สาย Arduino, แบตเตอรี่ 9v ธรรมดาและตัวเชื่อมต่อสำหรับเชื่อมต่อแบตเตอรี่กับ Arduino สายไฟฟ้าสำหรับเชื่อมต่อไดรเวอร์มอเตอร์ไฟฟ้า สายเคเบิล USB โทรศัพท์ที่ใช้ Android เวอร์ชัน 4 ขึ้นไป 4 ล้อ 50 มม. ล้อยางหมุนจาก Screwfix หรือ Toolstation สองฮับ Lynxmotion HUB-02 สากล










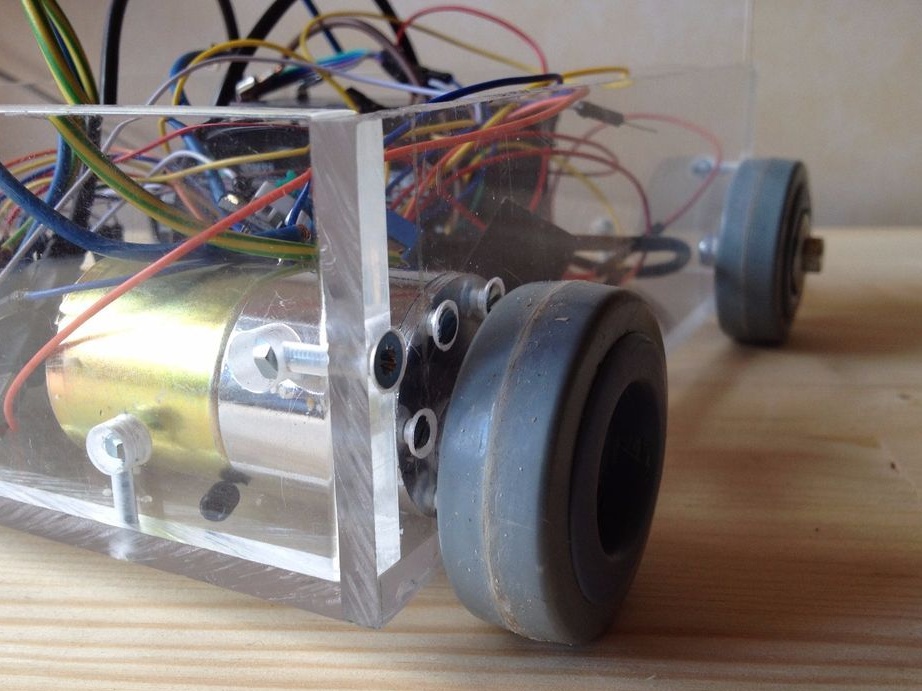
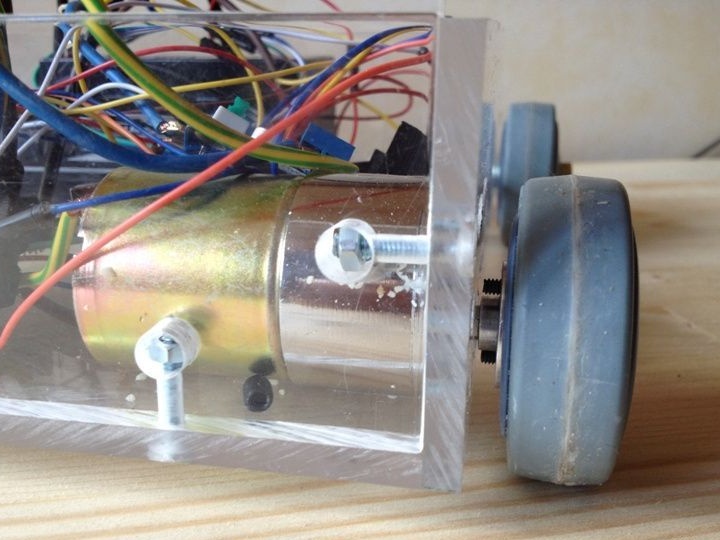
ตัวเรือนประกอบจากพลาสติกยาว 22 ซม. และกว้าง 17 ซม. มอเตอร์สองตัวจะต้องเชื่อมต่อกับเพลาและยึดด้วยหมุดเกลียว
ล้อหน้า
ยางจะถูกลบออกจากลูกกลิ้งและมีรูสองรูที่เจาะตามรูที่ฮับ ฮับได้รับการแก้ไขบนแกนที่ผ่านตัวเรือนด้วยหมุดเกลียว หลังจากนั้นลูกกลิ้งจะถูกจับยึดที่ฮับและใส่ยางเข้าไป
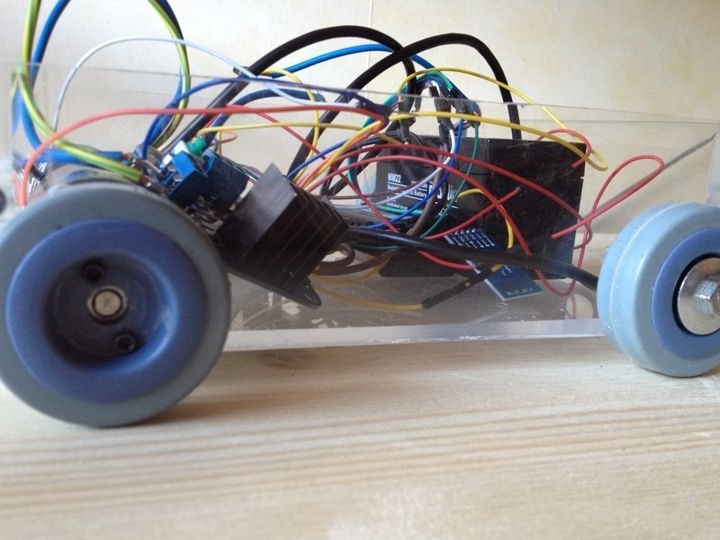
ล้อหลัง
ล้อหลังถูกคลายออกจากบานพับและยึดผ่านรูที่เจาะในตัวเรือน
การเชื่อมต่อไฟฟ้า
จะมีปัญหาในการโหลดรหัสโปรแกรมใน Arduino นี่เป็นเพราะความจริงที่ว่าโมดูลบลูทู ธ ซึ่งเป็นรายชื่อ RX \ TX เชื่อมต่อกับ Arduino หมุด 1 และ 2 ซึ่งใช้ในการถ่ายโอนข้อมูลผ่านทาง USB จำเป็นต้องเปลี่ยนผู้ติดต่อ 1 และ 2 เป็น 11 และ 12 ในไลบรารีที่เชื่อมต่อซึ่งจะใช้สำหรับการถ่ายโอนข้อมูล
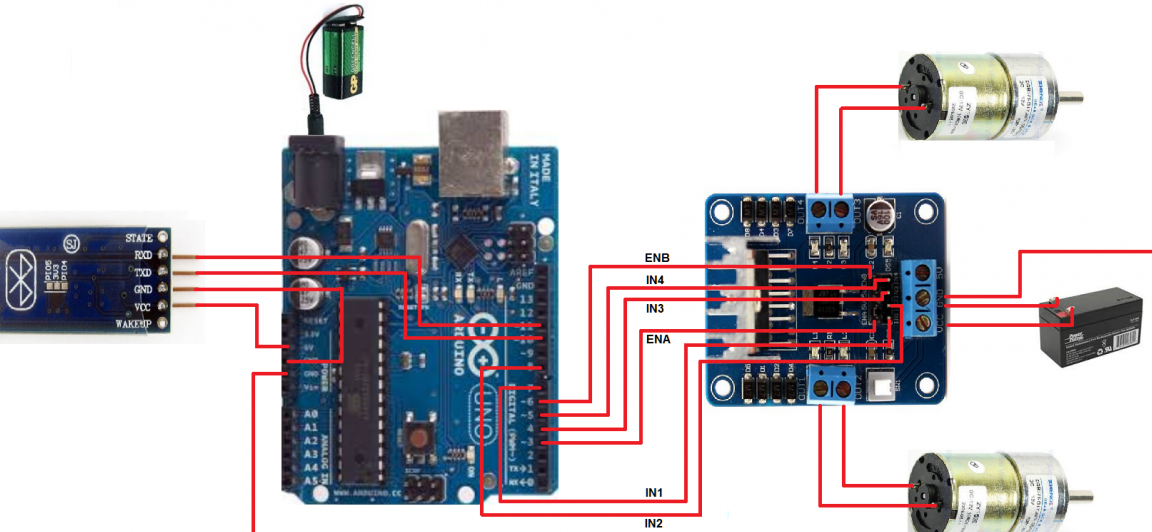
ไดรเวอร์มอเตอร์ไม่จำเป็นต้องใช้แหล่งจ่ายไฟแยกต่างหากสำหรับตรรกะ 12V เพียงพอสำหรับการขับเคลื่อนตรรกะของไดรเวอร์และมอเตอร์ ลบของแบตเตอรี่ควรเชื่อมต่อกับทั้ง Arduino และไดรเวอร์มอเตอร์ สามารถจัมเปอร์ไดรเวอร์ ECA / 5V และ ENB / 5V ได้ มันจะต้องถูกลบออกก่อนเชื่อมต่อกับ Arduino ไม่ควรเชื่อมต่ออะไรกับหมุด 5V สองตัว
รหัส Android
ไฟล์ที่แนบจะต้องถูกคลายไฟล์และนำเข้าสู่ Android Studio บรรจุใน apk และติดตั้งบนโทรศัพท์
ไฟล์คีย์:
กิจกรรมอุปกรณ์ที่จับคู่:
deviceList.java
activity_device_list.xml
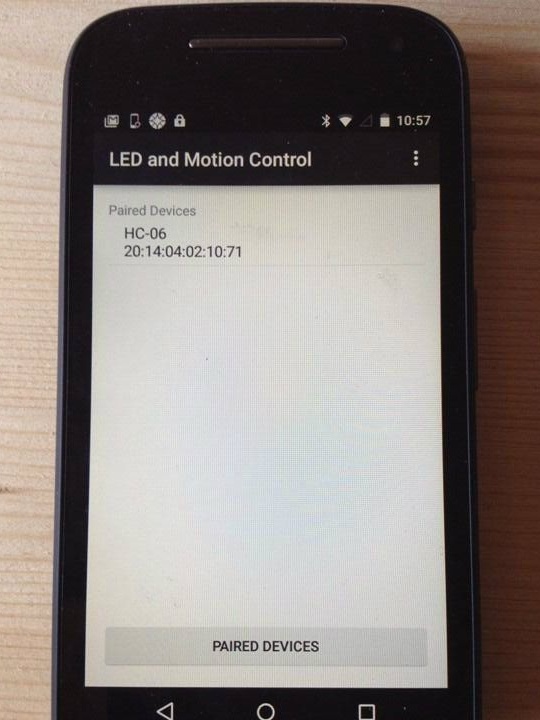
กิจกรรม LED และการควบคุมการเคลื่อนไหว:
ledControl.java
activity_led_control.xml
Manifest:
AndroidManifest.xml
กิจกรรมที่จับคู่อุปกรณ์แสดงอุปกรณ์บลูทู ธ ที่มีอยู่ ทันทีที่เชื่อมต่ออุปกรณ์การควบคุมจะถูกโอนไปยัง LED และการควบคุมการเคลื่อนไหว
ปุ่มเปิด / ปิดจะส่งข้อความ“ เปิด” หรือ“ ปิด” ไปยัง Arduino เพื่อเปิดหรือปิดไฟ LED ในตัว accelerometer ของโทรศัพท์ซึ่งส่งค่า x / y จากเซ็นเซอร์ในแต่ละครั้งที่ค่าเหล่านี้เปลี่ยนแปลงควบคุมการเคลื่อนไหว ตามนี้ Arduino คำนวณความเร็วและทิศทางของการหมุนของมอเตอร์ในช่วงตั้งแต่ 0 ถึง 255 มันส่งค่า Arduino เหล่านี้ในรูปแบบของ 'L-255:' หรือ 'R100' ฯลฯ จากนี้ Arduino ส่งคำสั่งความเร็วในการหมุนของเอ็นจิ้นซ้ายไปยัง ENA, อันที่ถูกต้องสำหรับ ENB และเปลี่ยนทิศทางการหมุนโดยการเปลี่ยนขั้วเป็น IN1, IN2 สำหรับซ้าย, N3 และ N4 สำหรับเครื่องยนต์ที่เหมาะสม