


สวัสดีตอนนี้ฉันต้องการแบ่งปันคำแนะนำในการสร้างรถถัง จะมีสองตัวเลือกสำหรับตัวควบคุมภายใน: ESP -8266 และ Arduino Pro Mini ในเวอร์ชั่นแรกการควบคุมจะดำเนินการผ่านการสื่อสาร Wi-Fi ในวินาที - IR ระยะไกล มันทำบนพื้นฐานของ TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35) มันขับเคลื่อนด้วยชุดเกียร์มอเตอร์ Twin Tamiya 70097 และมอเตอร์ที่มาพร้อมกับกระปุกเกียร์
เราจะต้อง:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- กาวรูปแบบ (ตัวอย่างเช่น TAMIYA Cement)
- ชุดเกียร์มอเตอร์ Twin Tamiya 70097
- ESP 8266 -12E หรือ Arduino Pro Mini 8MHz 3.3V
- ระบบควบคุมแรงดันไฟฟ้า AMS 1117 3.3v 8000mA (หากตัวเลือกด้วย ESP 8266-12E)
- ไดรเวอร์เครื่องยนต์ Qifei L9110
- ตัวเก็บประจุ 10v 1000uF
- LED สองสี (แดง, เขียว)
- ไฟ LED สีน้ำเงิน
- LED สีแดง 2 ดวง
- ตัวรับสัญญาณ IR
- photoresistor
- 2 ช่องสำหรับแบตเตอรี่ AAA 2 ก้อนหรือแบตเตอรี่ AAA 1.2V 1000mA NI-MN 4 ก้อน
- ตัวต้านทาน 2 ตัว 2 โอห์ม
- ตัวต้านทาน 4 ตัว 75 โอห์ม
- ตัวต้านทาน 6 ตัว 10 kOhm (ถ้าเลือกได้กับ ESP 8266-12E)
- ปุ่ม
- photoresistor
- USB - TTL
- หัวแร้ง
- สายไฟหลายสี
ขั้นตอนที่ 1 ที่อยู่อาศัยและกลไก
ก่อนอื่นคุณต้องรวบรวม รูปแบบ TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35) เราติดส่วนล่างตามคำแนะนำยกเว้นชิ้นส่วนที่ปิดช่องเปิดสำหรับเพลาเกียร์ ดาวนำยังไม่ติด กาวส่วนบนตามคำแนะนำโดยไม่มีการเปลี่ยนแปลง หลังจากติดกาวทั้งหมดนี้แล้วปล่อยให้แห้งและไปที่ชุดเกียร์ ดังที่เห็นได้จากคำแนะนำ Tamiya 70097 สามารถประกอบในสองรุ่นที่แตกต่างกัน
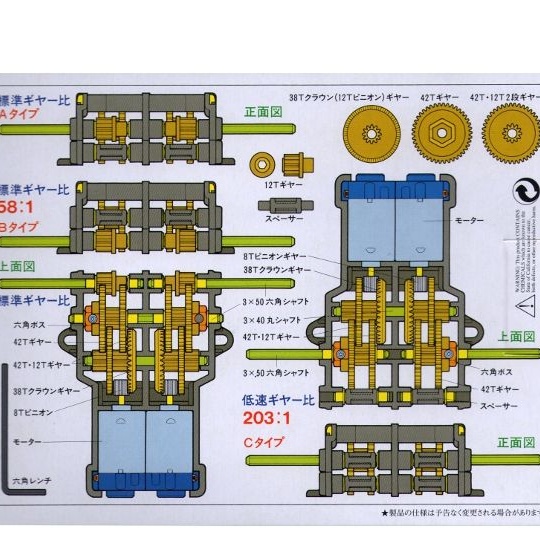
ตัวเลือกแรกที่มีอัตราทดเกียร์ 58: 1, ครั้งที่สอง - 203: 1 เราต้องการตัวเลือกแรก และที่นี่ก็ไม่ง่ายเหมือนกัน ในกรณีนี้เอาต์พุตของแกนอาจอยู่ใกล้กับด้านล่างของกระปุกเกียร์หรือที่อยู่ตรงกลาง การหายใจออกของแกนจะต้องทำในรูตรงกลาง! หลังจากประกอบกระปุกเกียร์แล้วเราจะทำการติดตั้งลงบนโมเดล ในทางทฤษฎีทุกอย่างควรจะง่ายเพราะทั้งโมเดลและกระปุกเกียร์ของ บริษัท หนึ่ง ๆ ในทางปฏิบัติ - กล่องเกียร์ต้องถูกผลักไปที่นั่น ในตำแหน่งแนวนอนของกระปุกเพลาของไดรฟ์ล้อโป่งขึ้นด้านบนดังนั้นฉันจึงต้องตัดแผ่นโลหะซึ่งทำให้มันเป็นไปได้ที่จะแก้ไขกระปุกเกียร์ในตำแหน่งที่ต้องการ

เพลาเกียร์จะต้องถูกตัด 3 มม. จากนั้นให้กาวล้อขับเคลื่อนบนพวกเขา

ในส่วนบนใกล้กับด้านหลังเราสร้างรูสำหรับ LED สองสีและตัวรับสัญญาณ IR

ด้านหน้ามีรูสำหรับ LED สีน้ำเงินซึ่งจะทำหน้าที่เป็นไฟฉาย

และด้านในฟักไข่ - สำหรับเป็นตัวรับแสง

ที่ด้านหลังให้ติดกาวไฟ LED สีแดงเพื่อส่องสว่าง

คุณต้องบัดกรีสายไฟทั้งหมด จะสะดวกกว่าก่อนการติดตั้ง
ขั้นตอนที่ 2 ช่างไฟฟ้า
ที่นี่ฉันจะให้ตัวเลือกสำหรับการประกอบเพิ่มเติม
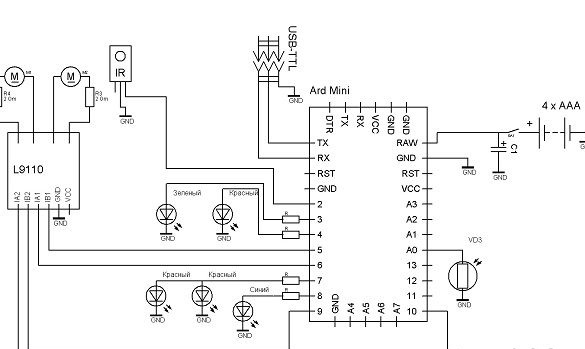
หากคุณเลือก ESP 8266 โมดูล Wi-Fi ในตัวช่วยอำนวยความสะดวกในกระบวนการควบคุมและการเชื่อมต่ออย่างมากสามารถตั้งโปรแกรมได้อย่างง่ายดายใน Arduino IDE เป็นการดีที่สุดที่จะเลือกโมดูลที่มีหน่วยความจำ 4 Mb ในกรณีนี้จำเป็นต้องรวบรวมบังเหียนขั้นต่ำสำหรับการเริ่มและการกระพริบ ESP-8266 เฉพาะขา VCC เท่านั้นที่เชื่อมต่อโดยตรงกับแหล่งจ่ายไฟหมุดที่เหลืออยู่: CH_PD, RESET, GPIO0, GPIO2 จะต้องถูกดึงไปยังแหล่งจ่ายไฟ (VCC) ผ่านตัวต้านทาน ตัวต้านทาน 10kOm สามารถแทนที่ได้ด้วยตัวอื่น ๆ จาก 4.7kOm ถึง 50kOm ยกเว้น GPIO15 - ค่าของมันต้องสูงถึง 10k โดยตรงไปยังลบ (GND) ของแหล่งจ่ายไฟเราเชื่อมต่อ GND เท่านั้นและเรายังดึง GPIOO ผ่านตัวต้านทานไปที่ 10kOm เพื่อนำโมดูลเข้าสู่โหมดดาวน์โหลดเฟิร์มแวร์ไปยัง GND ปุ่มจำเป็นสำหรับการรีบู๊ตและกระพริบโมดูล ขั้วต่อ USB-TTL - สำหรับเฟิร์มแวร์
นี่คือแผนภาพ
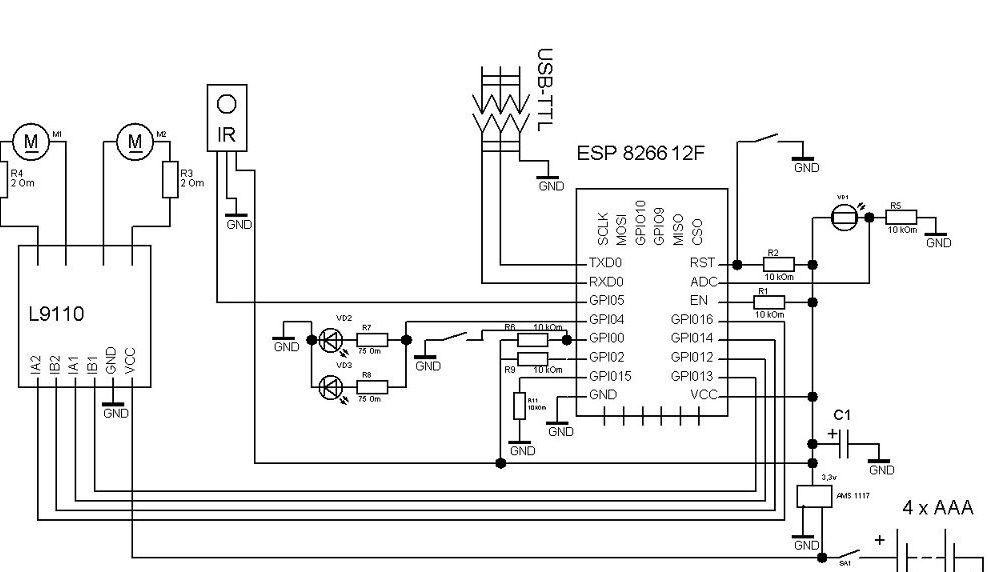
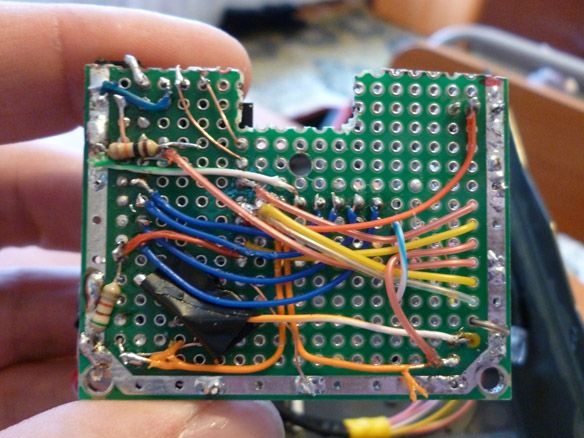
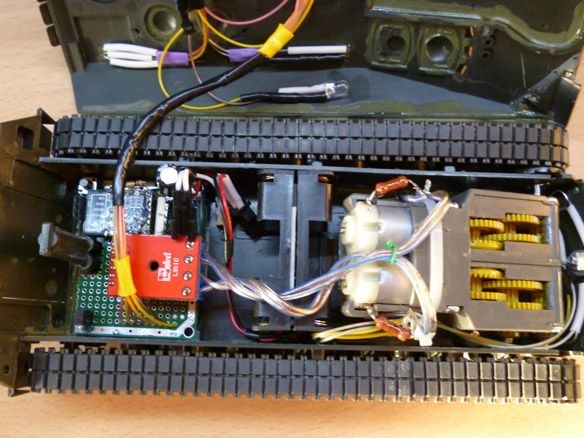
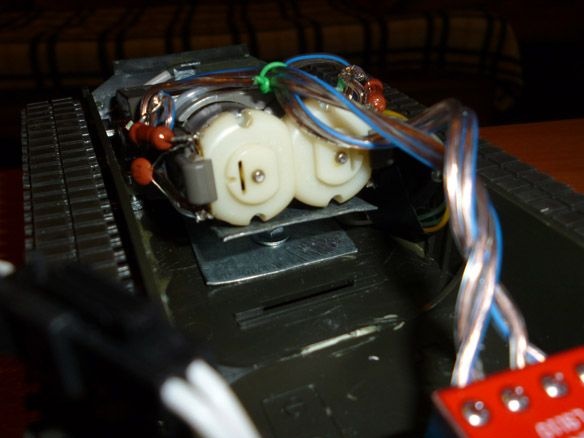
ฉันจะอธิบายเล็กน้อยไฟ LED สีน้ำเงินและสีแดงสองดวงเป็นสิ่งจำเป็นสำหรับการแบ็คไลท์ (มันสามารถมองเห็นได้และสวยงามในที่มืด), photoresistor เชื่อมต่อกับ ADC ของคอนโทรลเลอร์และจำเป็นต้องกำหนดแสง (เมื่อแสงไฟมืด) ตัวต้านทานแบบดึงขึ้น 10 kOhm, 75 Ohm สำหรับ LED, จำกัด กระแส 2 Ohm สำหรับมอเตอร์ (ไม่มีพวกเขาเมื่อพยายามเคลื่อนย้ายตัวควบคุมโอเวอร์โหลด) เราประสานทุกอย่างตามวงจรบนแผงวงจร สำหรับแหล่งจ่ายไฟคุณสามารถใช้แบตเตอรี่ขนาด "น้อย" 4 ก้อนหรือแบตเตอรี่ขนาด AAA สี่ก้อนซึ่งบัดกรีเป็นชุด เราติดสองช่องของแบตเตอรี่สองก้อนด้วยเทปสองด้านและเชื่อมต่อเป็นชุด ช่องใส่แบตเตอรี่และตัวสะสมจะอยู่ระหว่างกล่องเกียร์และแผงวงจร

หากทางเลือกของคุณตกลงบน Arduino มีเพียง Arduino Pro MINI เท่านั้นที่เหมาะกับข้างใน มันคุ้มค่าที่จะเลือกบอร์ด 3.3 โวลต์เนื่องจากมอเตอร์ถูกออกแบบมาสำหรับ 3 โวลต์และคุณไม่ต้องการแยกมอเตอร์และ Arduino ออก Arduino ง่ายกว่า ชุดควบคุมคอนโทรลเลอร์และตัวควบคุมแรงดันไฟฟ้าทั้งหมดมีอยู่ในบอร์ดแล้ว มันยังคงที่จะปลดล็อคซ็อกเก็ต Arduino และไดรเวอร์มอเตอร์บนแผงวงจร

ขั้นตอนที่ 3 การเตรียมสภาพแวดล้อมการเขียนโปรแกรม
ในการแก้ไขเฟิร์มแวร์และเติมร่างใน ESP คุณจะต้องติดตั้ง Arduino IDE จากเว็บไซต์อย่างเป็นทางการของ Arduino.cc รวมถึงติดตั้ง Add-on สำหรับ ESP ผ่านทาง Manager Manager ในการดำเนินการนี้ให้เริ่มต้น Arduino IDE จากนั้นคลิกที่ไฟล์ - การตั้งค่า - ในฟิลด์เพิ่มเติมบอร์ดผู้จัดการ URL แทรกลิงค์
http://arduino.esp8266.com/package_esp8266com_index.jsonคลิกตกลง (คุณสามารถป้อนลิงค์ต่าง ๆ โดยคั่นด้วยเครื่องหมายจุลภาคในฟิลด์นี้) เครื่องมือถัดไป - บอร์ด - บอร์ดผู้จัดการป้อน esp8266 ในฟิลด์ตัวกรองและคลิกที่ ESP8266 โดยฟอรัมชุมชน ESP8266 คลิกติดตั้งและรอให้การดาวน์โหลดเสร็จสิ้น ตอนนี้ก็ยังคงเลือกบอร์ด - ทั่วไป ESP8266 ในเมนูเครื่องมือและตั้งความถี่ของโมดูลของคุณเป็น 80 หรือ 160Mhz, ขนาดของหน่วยความจำแฟลชและเลือกพอร์ตอนุกรมที่เชื่อมต่ออะแดปเตอร์ USB-TTL
สำหรับ Arduino เพียงติดตั้ง Arduino IDE จากเว็บไซต์ Arduino.cc อย่างเป็นทางการ
ขั้นตอนที่ 4 เฟิร์มแวร์
มันยังคงอยู่ในการแก้ไขภาพร่างและเติมด้วย ESP
ในฟิลด์ "String _ssid =" ";" ระหว่างเครื่องหมายคำพูดระบุจุดเชื่อมต่อที่คุณต้องการเชื่อมต่อ
"String _password =" ";" เป็นรหัสผ่านสำหรับเครือข่ายนี้
"String _ssidAP =" Mardella ";" ชื่อของเครือข่ายที่ ESP จะเพิ่มหากไม่เชื่อมต่อกับเครือข่ายที่มีอยู่
"String _passwordAP =" 12345678 ";" - รหัสผ่านของเครือข่ายที่ ESP จะเพิ่มหากไม่ได้เชื่อมต่อกับที่มีอยู่
"String SSDP_Name =" Mardella ";" ชื่อ SSDP
หลังจากเริ่มต้นแล้ว ESP จะพยายามเชื่อมต่อกับจุดเชื่อมต่อที่ระบุไว้ในร่างภาพหากประสบความสำเร็จคุณต้องกำหนดที่อยู่ IP ของหุ่นยนต์ของเราและเชื่อมต่อกับที่อยู่นี้ผ่านเบราว์เซอร์ คุณยังสามารถผ่านคอมพิวเตอร์ไปยังโครงสร้างพื้นฐานเครือข่ายค้นหารถถังของเราที่นั่นและดับเบิลคลิกเพื่อเชื่อมต่อกับมัน หากการเชื่อมต่อล้มเหลว ESP จะกลายเป็นจุดเชื่อมต่อ จากนั้นสามารถเข้าถึงได้โดยเชื่อมต่อกับจุดเชื่อมต่อใหม่และป้อน 192.168.1.1 ในเบราว์เซอร์
เว็บอินเตอร์เฟสประกอบด้วยสองหน้า คนแรกที่จะควบคุม ประการที่สองคือการปรับแต่ง ในหน้าสองคุณสามารถระบุจุดเชื่อมต่อที่คุณต้องการเชื่อมต่อรวมถึงชื่อรถถังและชื่อและรหัสผ่านของจุดเชื่อมต่อที่ ESP ยกขึ้น การเปลี่ยนแปลงทั้งหมดจะมีผลหลังจากรีบูต คุณยังสามารถรีสตาร์ทโมดูลผ่านทางเว็บอินเตอร์เฟส
สำหรับ Arduino คุณต้องแก้ไขฟิลด์“ results.value” ทั้งหมด ต้องจดบันทึกรหัส IR ของรีโมทควบคุมที่คุณจะใช้ที่นั่น

วิดีโอ tanchika: