
ความผิดปกติของหุ่นยนต์ BIBOT-1 คือมันสามารถทำงานสองอย่างได้ สามารถเคลื่อนที่ไปด้านหลังแหล่งกำเนิดแสงหรือตามแนวเส้นสีดำที่สามารถวาดลงบนกระดาษ หุ่นยนต์ มีความยืดหยุ่นสูงในการตั้งค่านั่นคือหลังจากนั้นมันสามารถปรับแต่งตามเงื่อนไขที่ต้องการนั่นคือเพื่อให้ไวต่อแสงมากขึ้นหรือน้อยลง นอกจากนี้ยังเป็นไปได้ที่จะปรับความเร็วของการหมุนของเครื่องยนต์ซึ่งจะช่วยให้หุ่นยนต์ทำงานได้ดีขึ้นโดยเฉพาะอย่างยิ่งเมื่อเคลื่อนที่ไปตามเส้น

อุปกรณ์และหลักการของหุ่นยนต์:
ฐานของหุ่นยนต์ทำจากกระดาษแข็งเทมเพลตจะถูกพิมพ์บนเครื่องพิมพ์แล้วจึงล้มเหลว ในส่วนของส่วนประกอบวิทยุนั้นมีการใช้ textolite เป็นพื้นฐานโมดูลนั้นจะติดกับฐานของหุ่นยนต์ เพื่อให้ร่างกายแข็งตัวจึงใช้ซี่โครงพิเศษในการออกแบบ
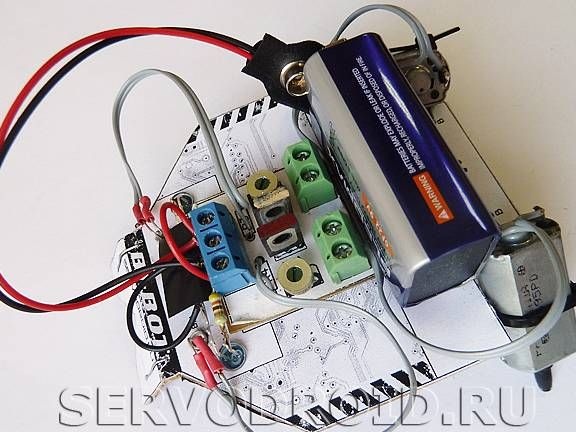
มีการติดตั้งเครื่องยนต์เป็นส่วนใหญ่เหล่านี้ DIYนั่นคือที่มุมหนึ่ง ด้วยเหตุนี้จึงไม่จำเป็นต้องใส่ล้อและกระปุกเกียร์ เพื่อป้องกันไม่ให้เพลาเลื่อนบนพื้นผิว
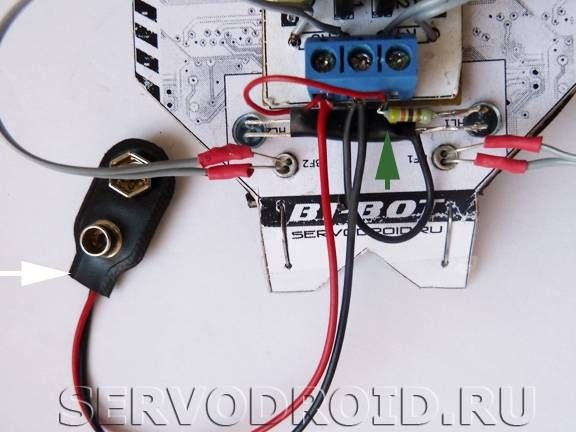
ใช้แบตเตอรี่ขนาด 9V ชนิด 6F22 เป็นแหล่งพลังงาน แบตเตอรี่ติดอยู่กับเทปและสามารถเปลี่ยนได้ง่ายเสมอ
ส่วนเรื่องของสวิตช์นั้น รถยนต์ ตัดสินใจหลีกเลี่ยงการติดตั้ง หุ่นยนต์เปิดและปิดโดยใช้คลิปที่ยึดกับแบตเตอรี่
และในที่สุดการปรับตัวของหุ่นยนต์ ในการปรับความไวของหุ่นยนต์ระบบจะมีตัวต้านทานปรับค่าสองค่า เมื่อพวกเขาหมุนคุณสามารถปรับความไวของหุ่นยนต์เป็นแสงและคุณยังสามารถปรับความเร็วของการหมุนของเครื่องยนต์ ยิ่งหุ่นยนต์ไวต่อแสงมากเท่าไหร่ก็ยิ่งเคลื่อนไหวได้เร็วขึ้นเท่านั้น
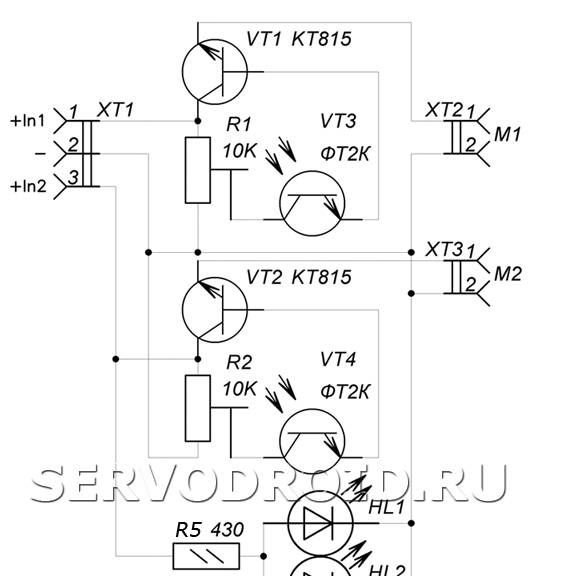
สำหรับหลักการของการทำงานทุกอย่างถูกกำหนดไว้ในแผนภาพ
วัสดุและเครื่องมือ:
- แบตเตอรี่ 9V และคลิปสำหรับการเชื่อมต่อ;
- คอนเน็กเตอร์สองตัวสำหรับเชื่อมต่อมอเตอร์ (เทอร์มินัลบล็อกสองส่วน)
- มอเตอร์
- พูดนานน่าเบื่อไนลอน
- ป้องกัน (ลูกกลิ้งยาง);
- โฟโต้ทรานซิสเตอร์สองตัว
- ไฟ LED อินฟราเรดสองดวง
- วงเล็บจากที่เย็บกระดาษ
- บล็อก terminal สามส่วนสำหรับการเชื่อมต่อแหล่งจ่ายไฟ;
- ตัวต้านทานปรับ

กระบวนการผลิต:
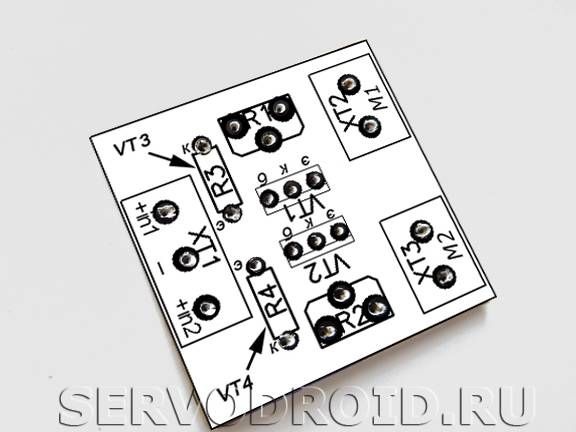
ขั้นตอนแรก ออกแบบ PCB
ค่าธรรมเนียมถูกสร้างขึ้นโดยวิธี LUT ก่อนที่จะทำงานพื้นผิวของไฟเบอร์กลาสจะต้องทำความสะอาดอย่างละเอียดแล้วล้างและแห้งให้สะอาด หลังจากการผลิตแทร็คนำไฟฟ้าต้องถูกตรวจสอบด้วยมัลติมิเตอร์สำหรับไฟฟ้าลัดวงจร
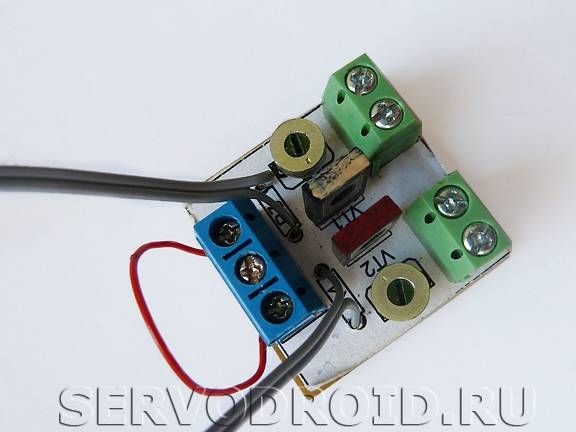
ขั้นตอนที่สอง การติดตั้ง อิเล็กทรอนิกส์ ธาตุ
ถัดไปคุณต้องนำภาพวาดที่พิมพ์บนกระดาษแล้วนำไปติดกับบอร์ดที่สร้างขึ้น ในกรณีนี้รูบนกระดาษและใน PCB จะต้องตรงกันทั้งหมด ถัดไปส่วนประกอบวิทยุได้รับการติดตั้งตามที่ระบุในแผนภาพ ในกระบวนการทำงานการติดตั้งตัวต้านทาน R3, R4 จำเป็นต้องติดตั้ง phototransistor VT3, VT4
ส่วนสุดโต่งของเทอร์มินัลบล็อกสามส่วน XT1 จะต้องเชื่อมต่อกับสายยึด จุดเชื่อมต่อของหน้าสัมผัสต้องมีการหุ้มฉนวนอย่างดีควรใช้ท่อหดความร้อนสำหรับจุดประสงค์เหล่านี้
ขั้นตอนที่สาม วิธีสร้างเคส
ภาพร่างของร่างกายจะต้องพิมพ์ลงบนกระดาษ A4 ธรรมดา ถัดไปคุณจะต้องเอากระดาษแข็งลูกฟูกและวาดภาพลงบนกระดาษแล้วจึงต้องตัดรอบ ๆ ซอง
ในกรณีที่รูปสัญลักษณ์ "กรรไกร" ตั้งอยู่ตามแนวเส้นหนาควรทำการตัด ต่อจากนั้นตามเส้นประสีดำคุณจะต้องงอกระดาษแข็งดังเช่นในภาพแล้ววางลูกศรสีดำ



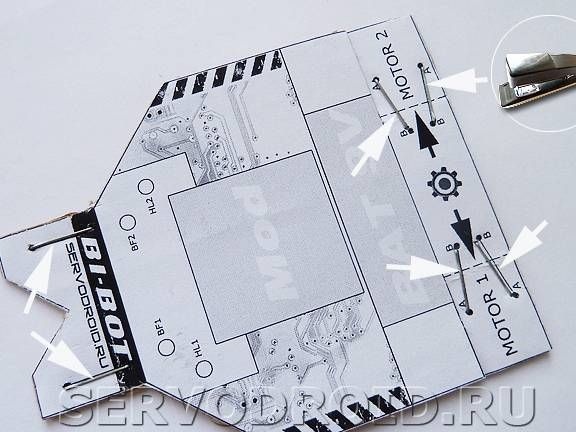


ด้านหน้าและด้านหลังของตัวเรือนไปยังตำแหน่งที่ระบุโดยใช้ที่เย็บกระดาษคุณต้องติดตั้งตัวยึด สถานที่ติดตั้งถูกทำเครื่องหมายด้วยเส้นสีดำพร้อมวงกลม ลวดเย็บกระดาษจำเป็นต้องทำให้เฟรมแข็ง หลังจากติดตั้งวงเล็บพวกเขาน่าเบื่อที่จะโค้งงอตามเส้นพับ
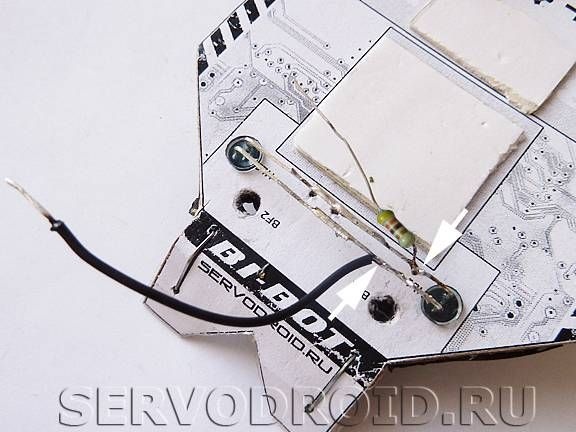
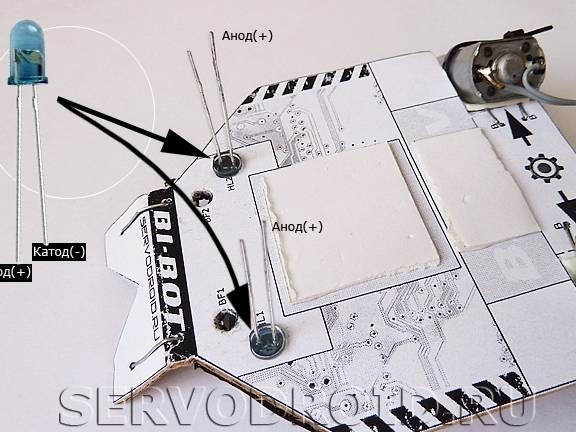
ในสถานที่ที่มีเครื่องหมาย BF1, BF2 คุณจะต้องเจาะรูเพื่อติดตั้งโฟโตทรานซิสเตอร์ ในสถานที่ HL1, HL2 คุณจะต้องสร้างรูขนาดที่พอดีกับเส้นผ่านศูนย์กลางของปลอกของ LED อินฟราเรด
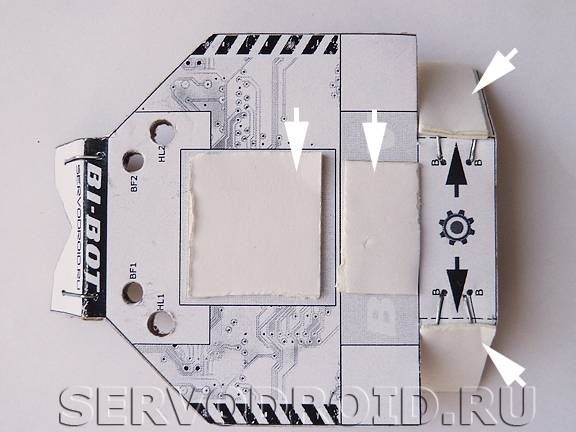
ในสถานที่ที่ได้รับการกำหนดให้เป็น Mod "," BAT 9V "และ" MOTOR 1 "," MOTOR 2 ", ติดแถบของเทปสองด้าน
ขั้นตอนที่สี่ การติดตั้งมอเตอร์
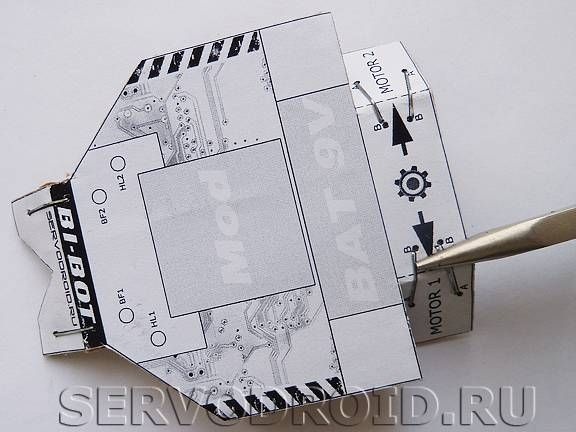
มอเตอร์ติดตั้งในตำแหน่งที่มีความสัมพันธ์กับไนล่อน เพื่อป้องกันการลื่นไถลเพลาจะต้องสวมด้วยอุปกรณ์ป้องกัน พวกเขาทำจากแถบยางซึ่งอยู่ในแท่งปากกาของฮีเลียม ในขั้นตอนเดียวกันประสานสายไฟเข้ากับมอเตอร์


ขั้นตอนที่ห้า การติดตั้งไฟ LED อินฟราเรด
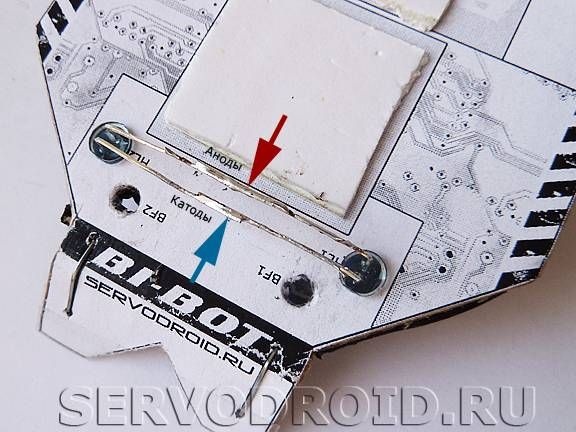
เมื่อติดตั้งไฟ LED อินฟราเรดเป็นสิ่งสำคัญที่จะไม่สับสนข้อสรุปของพวกเขาสำหรับองค์ประกอบที่นำเข้าติดต่อยาวเป็นขั้วบวกนั่นคือบวก ติดตั้ง LED ที่ตำแหน่ง HL1, HL2 ดังที่แสดงในภาพ ผลการวิจัยจะโค้งงอเพื่อให้ไดโอดสามารถเชื่อมต่อในแบบคู่ขนาน
ตัวต้านทาน 430 โอห์มจะต้องทำการบัดกรีให้กับหน้าสัมผัสที่เป็นบวกของ LED และสายสีดำไปยังหน้าสัมผัสเชิงลบ
ปลายอีกด้านของสายสีดำจะต้องเชื่อมต่อกับขากลางของชุดขั้วต่อสามส่วน สำหรับเอาต์พุตของตัวต้านทานจะเชื่อมต่อกับขั้วของเทอร์มินัลบล็อก
ขั้นตอนที่หก ขั้นตอนการสร้างขั้นสุดท้าย
เพื่อให้หุ่นยนต์เคลื่อนที่ตามเส้นโฟโตคอนดักเตอร์จะถูกติดตั้งไว้ที่ BF1, BF2 ดังรูป
ทรานซิสเตอร์สำหรับการเคลื่อนไหวด้านหลังแหล่งกำเนิดแสงจะถูกวางไว้ที่ด้านหลัง
โดยสรุปแล้วมอเตอร์เชื่อมต่ออยู่และใส่แบตเตอรี่


นั่นคือทั้งหมดที่หุ่นยนต์พร้อม ตอนนี้คุณสามารถลองเปิดใช้งานและกำหนดค่าตามเงื่อนไขที่ต้องการ