

Mikhail จาก Perm กับเพื่อนของเขา Alexander พัฒนาผิดปกติ รูปแบบ ยานพาหนะทุกพื้นที่สามแกนที่มีชื่อว่า "CONTROL" โดยทั่วไปแล้วความคิดในการสร้างยานพาหนะแบบภูมิประเทศทั้งหมดถูกเสนอโดยอเล็กซานเดอร์เพื่อนของเขา แต่มิคาอิลมีส่วนร่วมในการเปลี่ยนแปลงขั้นพื้นฐานในการออกแบบการสร้างสรรค์สิ่งใหม่และยังใช้ความพยายามอย่างมากในรถคันนี้ แนวคิดของยานพาหนะทุกพื้นที่มีความสุขผิดปกติตามความคิดของผู้แต่ง ยานพาหนะภูมิประเทศทั้งหมด จะไม่เป็นบึงธรรมดา แต่จะมีตัวเลือกเค้าโครงและประเภทของไดรฟ์มากมายและทั้งหมดนี้ควรเกิดขึ้นกับการเปลี่ยนแปลงเล็กน้อยในการออกแบบ ในระหว่างการก่อสร้างได้รับการพิจารณาเป็นหลัก bortopovorotny ตัวเลือกหรือล้อหน้าจะถูกนำมาใช้และแทร็กจะถูกวางไว้บนเพลาหลัง ยานพาหนะทุกพื้นที่มีการวางเครื่องยนต์ด้านหลัง แกนนำสองแกน: อันที่หนึ่งและสาม
สิ่งที่ฉันต้องการบรรลุ:
1. ยานพาหนะทุกพื้นที่จะต้องสามารถว่ายน้ำและดังนั้นจึงมีเรือประเภท ยาว 3400-3600 มม. หน้ากว้าง 1600-1800 มม
2. ความสามารถในการรับน้ำหนักได้ 500-600 กิโลกรัม
3. คนไม่เกิน 6 คน
4. มีความเร็วในการเคลื่อนที่สูง (70 บนพื้นผิวที่ไม่ปูกระเบื้อง)
5. มีความสามารถในการผ่านที่ดีเยี่ยมเพื่อให้ง่ายต่อการล่าสัตว์ / ตกปลา
7. ใช้เฉพาะส่วนประกอบและชุดประกอบที่ทำจากโรงงานอย่างสมบูรณ์เท่านั้น (ไม่มีรอยต่อไดรฟ์แบบต้มสำหรับไดรฟ์และข้อต่ออเนกประสงค์แบบโฮมเมดส่วนเสียฉันซื้ออันใหม่แล้วนำกลับมาใหม่ในบรรทัด 4 ชั่วโมงต่อมา
9. ควรเบาไม่เกินหนึ่งตัน
10. เก็บไว้ในงบประมาณประมาณ 250 ตัน
วัสดุที่เกี่ยวข้องในการก่อสร้างยานพาหนะทุกพื้นที่:
1) ผ้าปูที่นอนจากฤดูใบไม้ผลิ UAZ
2) ยาง Trelleberg T411 29x12.5x15
3) เครื่องยนต์จาก frets Viburnum 1.4 (ระยะทางประมาณ 5,000 กิโลเมตร)
4) กระปุกเกียร์อัตโนมัติความเร็วสูง 3-Opel Record 1992
5) คอพวงมาลัย Niva 2121
6) สะพานทหารของ Uaz
7) ท่อ 20x40 จะใช้สำหรับเชื่อมเฟรมซึ่งจะถูกหุ้มด้วยแผ่นอลูมิเนียมเป็นผล รุ่นฐาน NIVA 2200 มม.
อ่านเพิ่มเติมเกี่ยวกับขั้นตอนการประกอบยานพาหนะภูมิประเทศด้วยภาพถ่ายและภาพประกอบ
เพื่อเริ่มต้นกับมันตัดสินใจที่จะใช้เฟรมของยานพาหนะทุกพื้นที่ในอนาคต อย่างที่คุณเห็นจากภาพมันทำอย่างอิสระ:



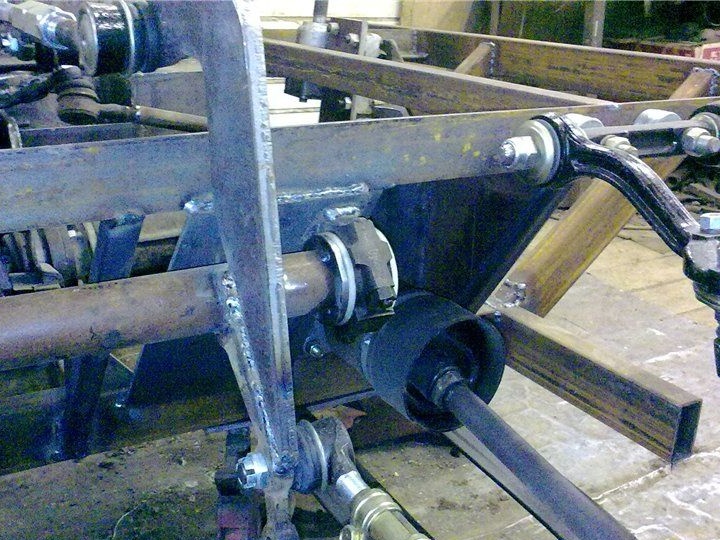
หลังจากติดตั้งสะพานเราเริ่มติดตั้งไดรฟ์:

และนี่คือสิ่งที่มาพร้อมกับล้อรถทุกพื้นที่:

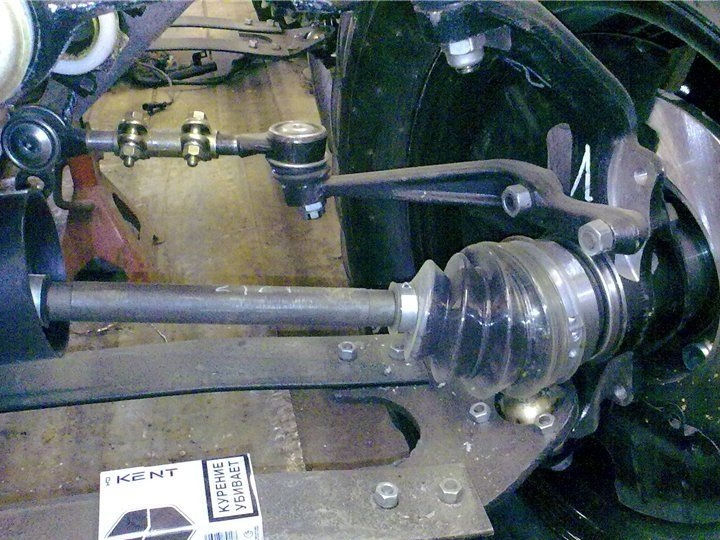
ในภาพด้านล่างคุณสามารถเห็นมุมการหมุนของล้อ:


จนถึงตอนนี้เราตัดสินใจหยุดที่เพลาหน้าและเพลาหลังที่หมุนได้
หนึ่งในข้อสังเกตของผู้เขียนคือเมื่อควบคุมเพลาหน้ามีความต้องการที่แตกต่างกันระหว่างแกน แต่ใช้รูปแบบที่คล้ายกันความแตกต่างในเส้นทางระหว่างเพลาระหว่างการหมุนจะน้อยที่สุดและเป็นไปได้ที่จะทำโดยไม่มีความแตกต่าง
นี่คือแผนภาพเส้นทางการเคลื่อนที่ของรัศมีวงเลี้ยวของทั้งหกล้อ:
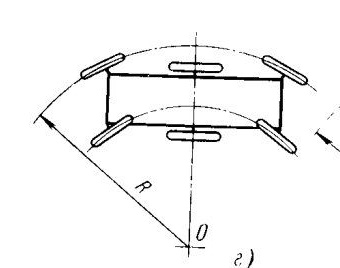
ความกว้างของยานพาหนะทุกพื้นที่บนล้ออยู่ที่ 2,200 มม. และล้อเองมีขนาดค่อนข้างเล็กมีความกว้างเพียง 317 มม.
นี่คือวิดีโอที่มีตัวอย่างที่ดีว่ากลไกการหมุนของแกนทำงานอย่างไร:
เมื่อติดตั้งเครื่องยนต์:

เพื่อที่จะเห็นความแตกต่างของการลื่นไถลของล้อโดยตรงจะมีการใส่เครื่องหมายก่อนจะกลิ้งออก จากผลการทดสอบพบว่าด้วยการผกผันอย่างสมบูรณ์ความแตกต่างระหว่างส่วนนอกและด้านหน้าด้านหลังของล้อเป็นการปฏิวัติครึ่งล้อ
หลังจากตรวจสอบความคล่องแคล่วผู้เขียนได้ดำเนินการติดตั้งพวงมาลัย ในภาพด้านล่างคุณสามารถเห็นการรองรับเพลาพวงมาลัยได้ใช้ก้านสูบจากคลาสสิก:
สปริงถูกตัดประมาณ 3-4 เซนติเมตร ที่ปลายแผ่นมีรูสำหรับติดแผ่นใต้บอลสปริงถูกเจาะโดยไม่มีปัญหา:
มีการรองรับซึ่งเสริมกำลังเพิ่มเติมทำให้งอที่อยู่ตรงกลางท่อไม่เกิน 1-2 มม. ในความเป็นจริงมันถูกเลือก backlash ในการสนับสนุน

เราติดตั้งคลัตช์ซึ่งเป็นหลังเวทีพร้อมอัลกอริธึมการรวมไว้ในคลาสสิก:

เกี่ยวกับสะพานในทางตรงกันข้ามกับทุ่งนามีการใช้ระเบิดมือขวา 2 ลูกตามลำดับระยะห่างระหว่างข้อต่อลูกยิ่งใหญ่กว่าเนื่องจากความแตกต่างของความยาวของลูกระเบิด เริ่มต้นด้วยการติดตั้งคันโยกส่วนบนและระยะห่างระหว่างพวกมันถูกวัดในสนามรวมถึงการปรับความยาวของลูกระเบิดมือ และหลังจากนั้นก็มีเพียงกำปั้นแขวนอยู่บนคันโยก มันถูกวางในแนวตั้งและใช้สปริงแต่ละอัน จากนั้นตรวจสอบการล่มสลายและชิ้นส่วนได้รับการปรับ
จากนั้นเหยียบคันเร่งและพวงมาลัย

หลังจากการติดตั้งและการปรับพวงมาลัยครั้งสุดท้ายพวกเขาดำเนินการตัดแต่งรถยนต์ทุกพื้นที่:


ด้านหลัง:

มุมมองด้านหน้า:

การทำงานกับอลูมิเนียมใกล้จะเสร็จสมบูรณ์:

แดชบอร์ดสุดยอด!

ใส่ที่นั่ง:


หนึ่งในการทัศนศึกษาครั้งแรกงานเกี่ยวกับตัวถังยังไม่เสร็จสมบูรณ์:
พวกเขาทำการฉีดให้ปีกกลับมาคลัตช์และเบรก:




จากนั้นผู้แต่งได้มีส่วนร่วมในการผลิตรางสำหรับยานพาหนะทุกพื้นที่บนเพลาหลังสองอัน:


ยานพาหนะทุกพื้นที่บนเส้นทาง:

ระยะใกล้:

ผู้แต่งรถยนต์คันนี้คือแอนดรูว์ที่มีชื่อเล่นว่าซานฮาและมิคาอิล "mishanya68"