


ก่อนอื่นเรามาทำความเข้าใจความแตกต่างระหว่าง octocopter กับ quadcopter ก่อน นอกจากชื่อแล้วนี่ยังเป็นจำนวนเครื่องยนต์บนราง กล่าวคือ quadrocopter - สี่เครื่องยนต์, octocopter - แปด นี่ก็เป็นจริงสำหรับ hexacopter - หก, tricopter - สาม, ฯลฯ ตัวอย่างเช่นหากมีไกด์เป็นสี่ (X) และเครื่องยนต์แปดตัวนี่ก็ยังเป็นอ็อคโทคอปเตอร์ แต่ถูกกำหนดให้เป็น X8 กล่าวคือ บนรางสี่แปดเครื่องยนต์
โดยพื้นฐานแล้วตัวเลขที่มีคำนำหน้าสำหรับ copters คือเครื่องบินที่ควบคุมโดยสัญญาณวิทยุของผู้ให้บริการจากภาคพื้นดิน นักเรียนจากอินเดียตัดสินใจที่จะก้าวต่อไปและทำให้ octocopter สามารถเลี้ยงคนขึ้นไปในอากาศได้ นี่ไม่ใช่โครงการราคาถูก การจัดหาเงินทุนถูกยึดครองโดยสถาบันการศึกษา
เครื่องมือและวัสดุ:
- เครื่องยนต์ Turnigy CA170 Motors - 8 ชิ้น;
- คอนโทรลเลอร์ Turnigy Fatboy 300A - 4 ชิ้น;
- ตัวควบคุม HV Turnigy 200A - 4 ชิ้น;
- เครื่องส่งสัญญาณไฮเทค XG11 Tx / Rx;
- คอนโทรลเลอร์ DJI A3 Pro บนเครื่องบิน;
- ตัวควบคุมเที่ยวบิน DJI Naza M V2;
- แบตเตอรี่ Zippy 22.2V 5Ah 40C LiPo - 16 ชิ้น;
- ที่ชาร์จ 6s LiPo Charger;
-XT150 คอนเนคเตอร์ - 50 ชิ้น;
- สายซิลิโคน 8AWG ลวด - 10 เมตร
-Servoprivody;
- ลูกบอลสำหรับเล่นสควอช (Squash Balls) - 4 ชิ้น;
- แผ่น MDF 25 ซม. x 50 ซม. x 2 มม.
-Drel;
- เครื่องบดมุม
- ไขควง
- ประแจ
- คีม
- เครื่องตัดเลเซอร์หรือเลื่อยสายพาน;
- ชุดของถั่ว 4mm, 6mm และ 8mm, bolts และแหวน;
-Gorelka;
- LED LED;
- อุปกรณ์เสริมสำหรับทิ้ง;
- ลวดเหล็กขนาด 2 และ 3 มม.
-Telrep สกรู 100 มม. - 200 มม. - 40 ชิ้น;
- 40 ตะขอและสลักเกลียวตา;
- เครื่องวัดความเร็วรอบ Turnigy;
- วิเคราะห์พลังงาน (Turnigy Wattmeter / แอมป์มิเตอร์);
- ควบคุมแบตเตอรี่;
- ท่ออลูมิเนียม
- แผ่นอลูมิเนียม
- เทปสองด้าน
- เครื่องเชื่อม
-Ruletka;
- คอมพิวเตอร์ที่มี Fusion 360
- แบตเตอรี่ 11.1 V 2200 mAh LiPo 30C
- ผ้าหนา 1.2 ม. x 1.2 ม.
- ด้ายและเข็มแข็งแรง
- เข็มขัดนิรภัย
ขั้นตอนที่หนึ่ง: การออกแบบ
เมื่อพัฒนา octocopter ที่มีการบรรจุต้นแบบพิจารณาตัวเลือกการกำหนดค่าที่หลากหลายและ X8 และ H และ T แต่มาถึงข้อสรุปที่ดีที่สุดด้วยเหตุผลต่าง ๆ จะเป็นการออกแบบของ octocopter ตามแบบแผนดั้งเดิม
จากนั้นจึงจำเป็นต้องค้นหาขนาดของ octocopter ที่ควรมี การคำนวณทำโดยใช้แบบจำลอง CAD บน Fusion 360 เป็นตัวอย่างสกรูที่มีอยู่ถูกนำมาพิจารณาในการคำนวณ เส้นผ่านศูนย์กลางที่เหมาะสมคือสามเมตรความสูงหนึ่งเมตร ตะกร้าด้านในสำหรับคน 55x55 ซม.

ขั้นตอนที่สอง: ตะกร้าสินค้า
กรอบถูกเชื่อมจากโปรไฟล์สี่เหลี่ยมอลูมิเนียมที่มีชั้นวางของ 50 มม. และความหนาของผนัง 2 มม.
โปรไฟล์ถูกตัดและเชื่อม ตะเข็บทำความสะอาด



ขั้นตอนที่สาม: แผ่นยึด
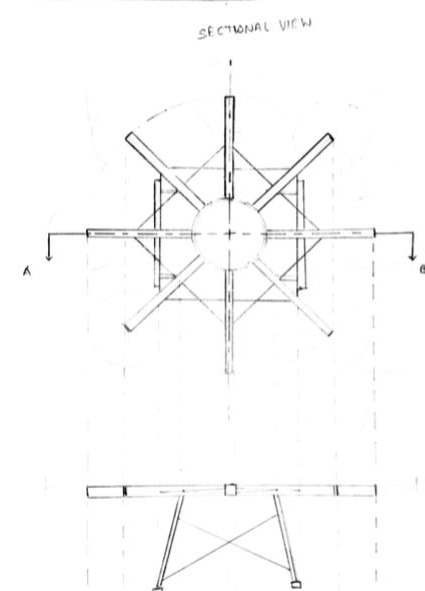
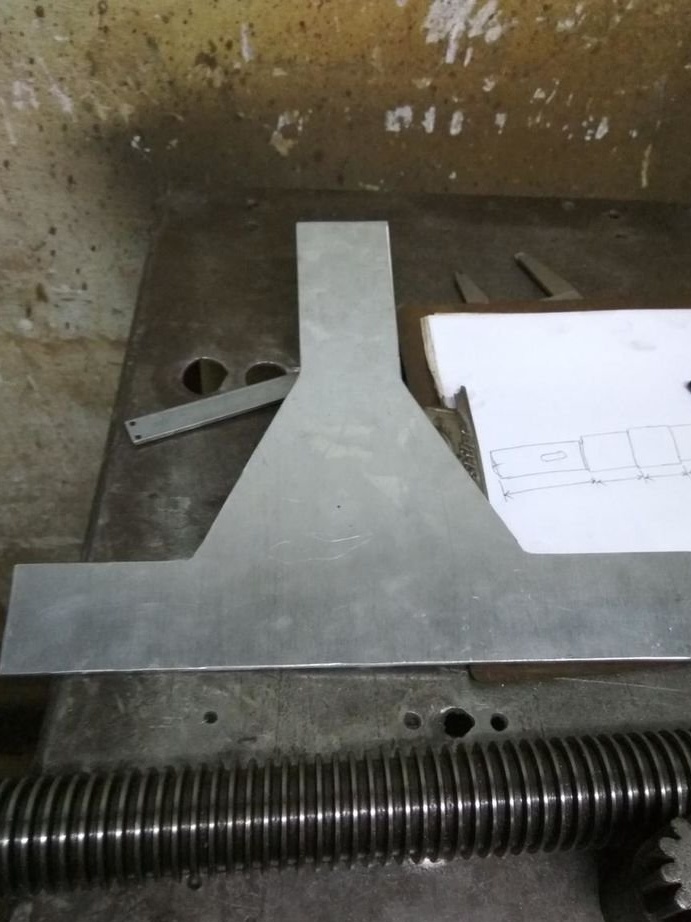
สำหรับตัวยึดหลักใช้แผ่นอลูมิเนียมขนาด 1.5 มม. มีตัวยึดแปดตัวรวมสี่ตัวที่มุมและอีกสี่ตัวที่อยู่ตรงกลางเฟรม ความยาวของไหล่แขนและชิ้นส่วนรองรับคือ 15 ซม. แต่ละตัวได้รับการออกแบบใน Fusion 360 แผ่นถูกตัดด้วยเครื่องตัดกัด เจาะรูติดตั้งอยู่ในพวกเขา จากนั้นวงเล็บถูกเชื่อมเข้ากับเฟรม






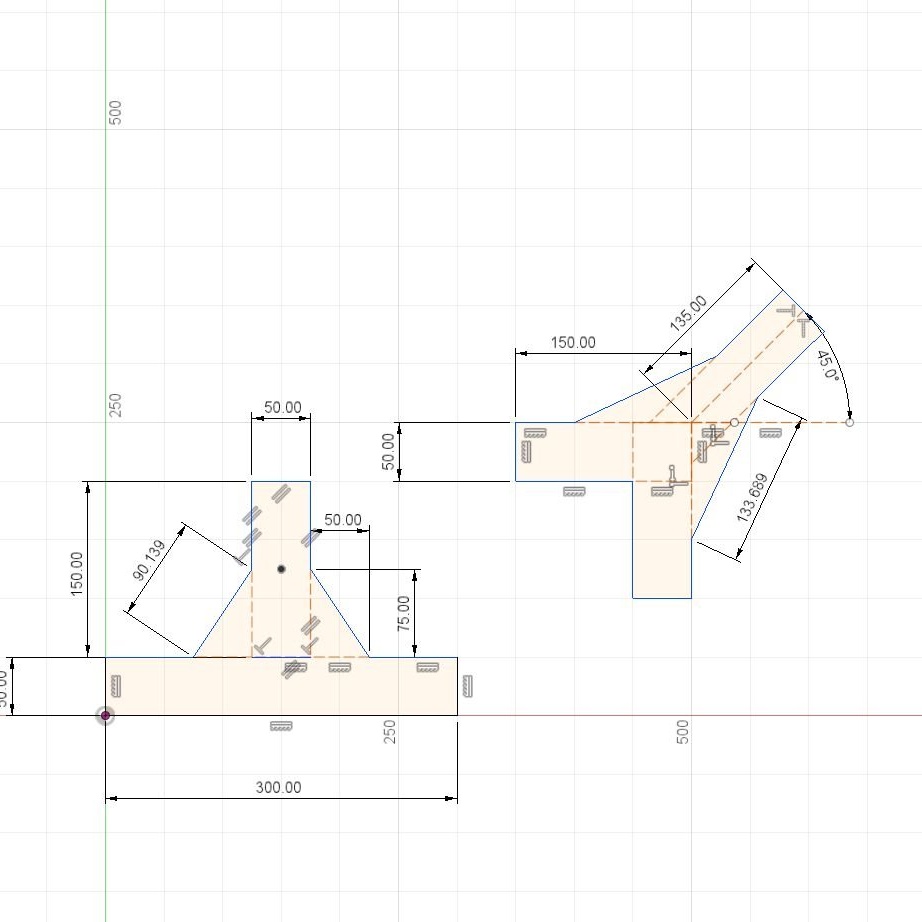
ขั้นตอนที่สี่: โปรไฟล์ผู้ให้บริการ
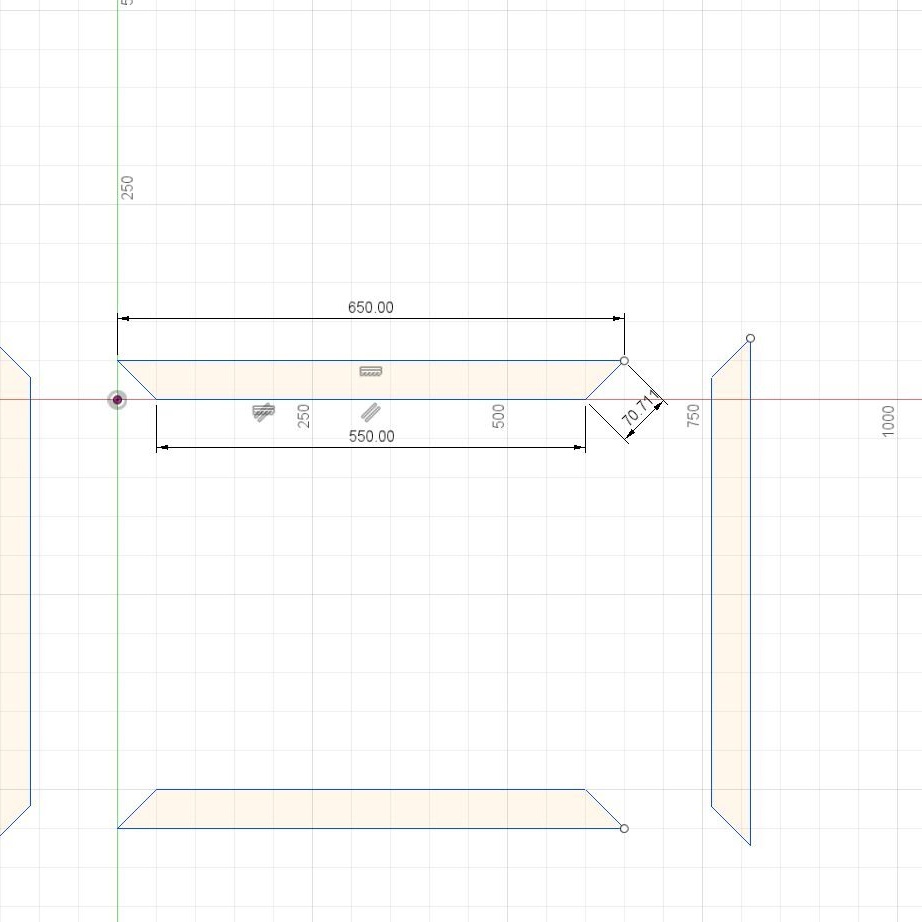
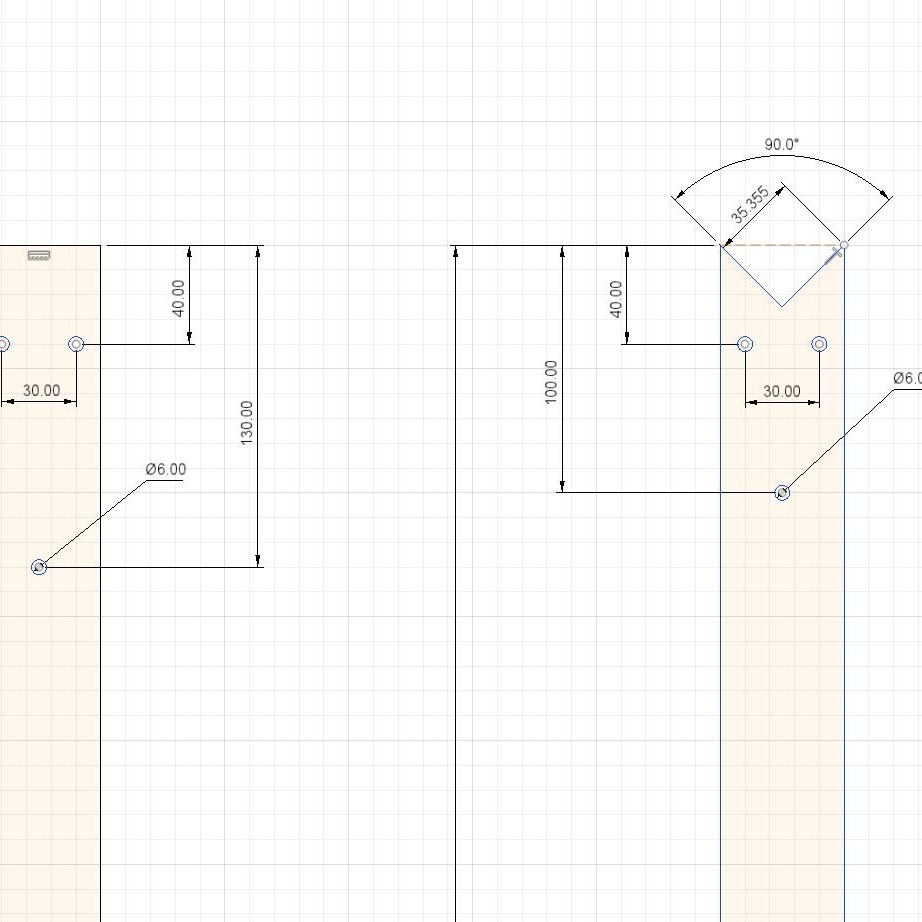
โพรไฟล์เหล่านี้ติดอยู่กับขายึดและมอเตอร์จะถูกติดตั้งที่ปลาย โปรไฟล์เป็นสี่เหลี่ยมจัตุรัสขนาด 50 X 50 ซม. และมีความยาวต่างกัน โปรไฟล์มีความยาว 112.5 ซม. ติดตั้งที่มุมด้านข้างของโปรไฟล์ 125 ซม. มีดคัตเอาท์ทำที่โพรไฟล์เชิงมุมที่มุม 45 องศา มันเป็นสิ่งจำเป็นที่ใบหน้าของมันอยู่ติดกับระนาบของมุม
ในการแก้ไขโปรไฟล์ไปที่วงเล็บหลักจะทำการเจาะรูสำหรับสลักเกลียว




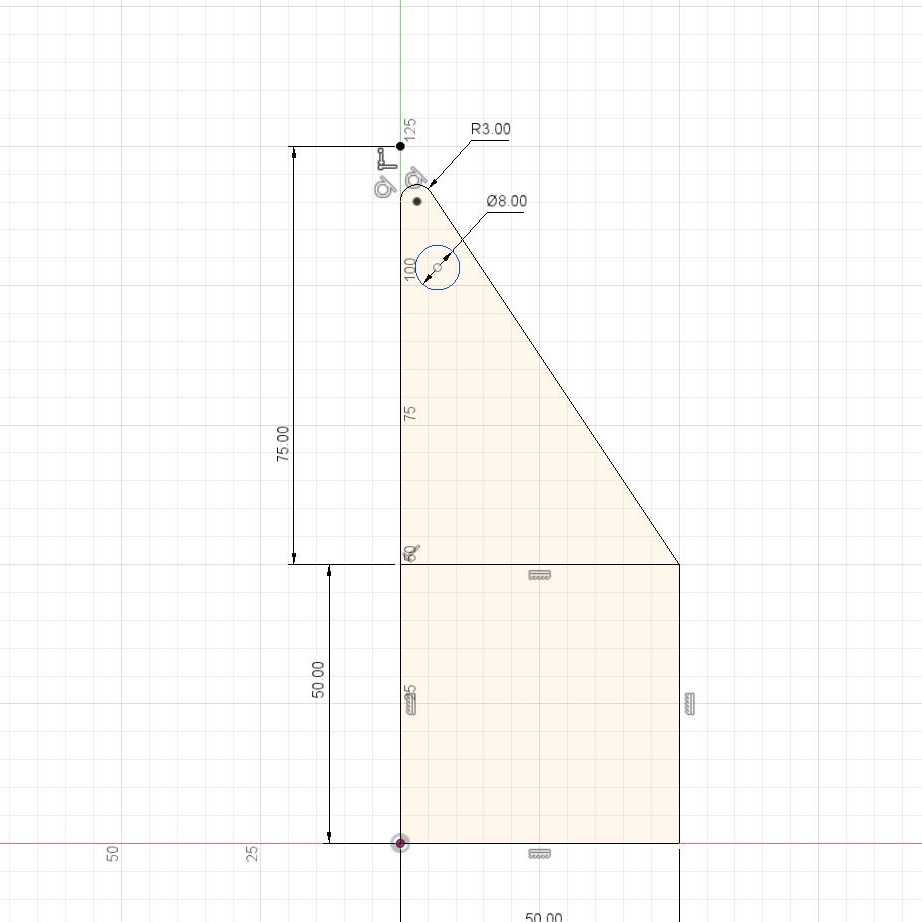
ขั้นตอนที่ห้า: เมานต์เครื่องยนต์
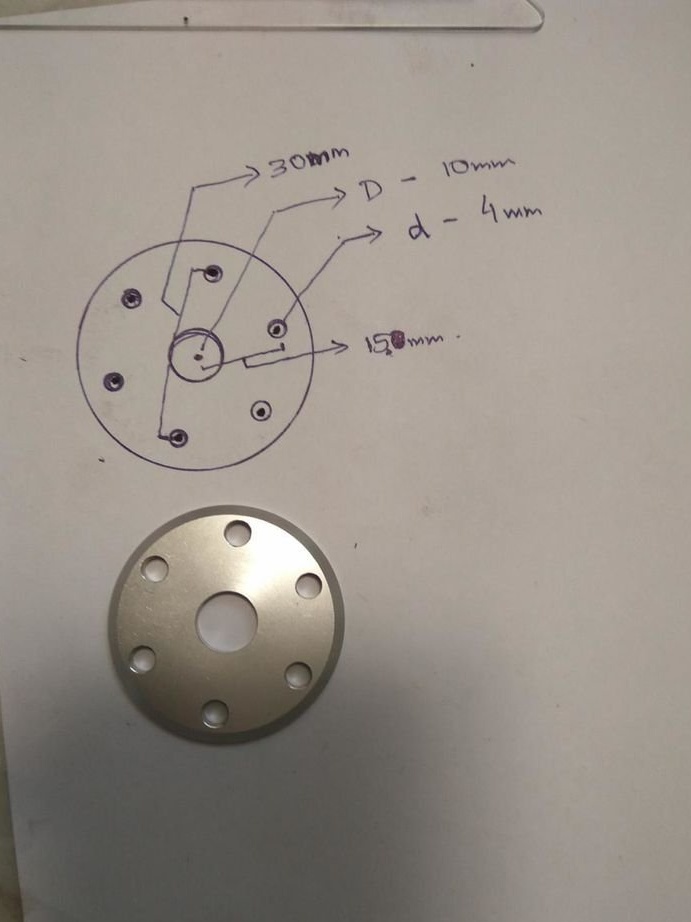
เครื่องยนต์ถูกขันเข้ากับแผ่นสี่เหลี่ยมอลูมิเนียม จากด้านล่างของแผ่นขนานกันมุมทั้งสองจะเมา ระยะห่างระหว่างพวกเขาเท่ากับความกว้างของโปรไฟล์ นอกจากนี้ยังมีแผ่นติดตั้งเครื่องยนต์ติดตั้งอยู่บนโปรไฟล์รูเจาะติดตั้งและทุกอย่างบิดเบี้ยวด้วยสลักเกลียว





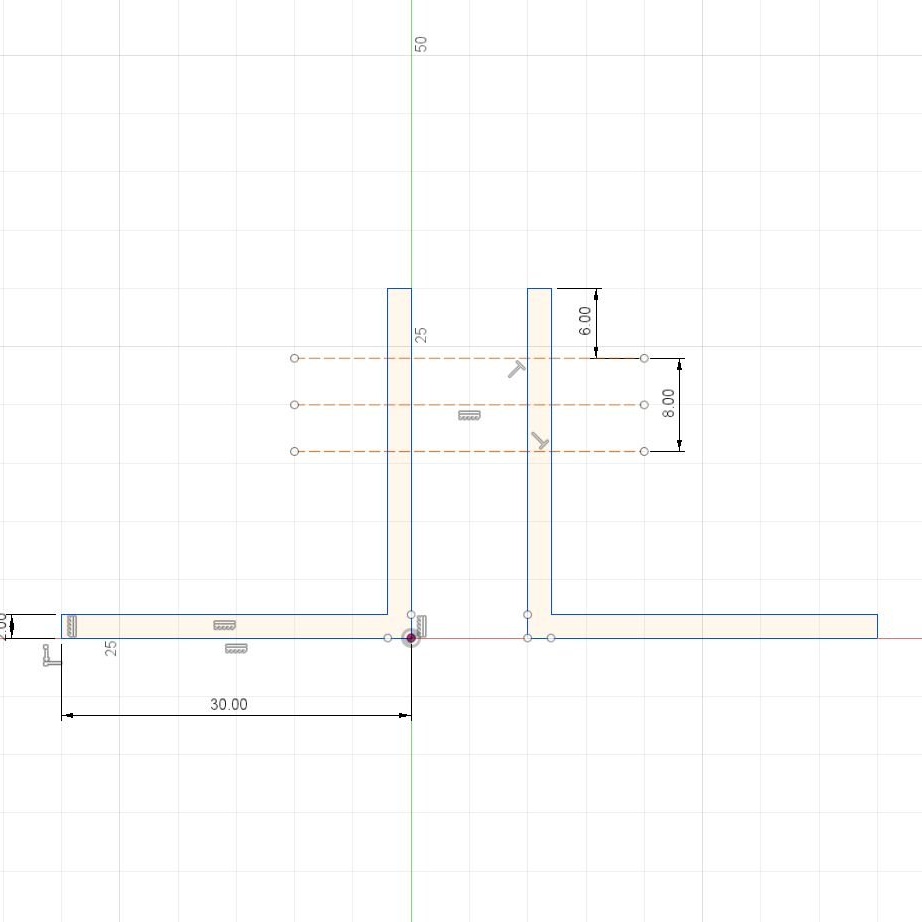
ขั้นตอนที่หก: แชสซี
ตัวถังทำจากอลูมิเนียมโปรไฟล์ 25 x 25 มม. และความหนา 3 มม. ทุกส่วนเชื่อมและขนาดของพวกเขาสามารถมองเห็นได้ในภาพ ความคิดคือการติดตั้งตัวถังออกจากตะกร้าที่มุม 30 องศา เพื่อป้องกันความเสียหายที่เกิดกับตัวเครื่องสายเคเบิลรองรับจะถูกดึงเข้ามาระหว่างกัน


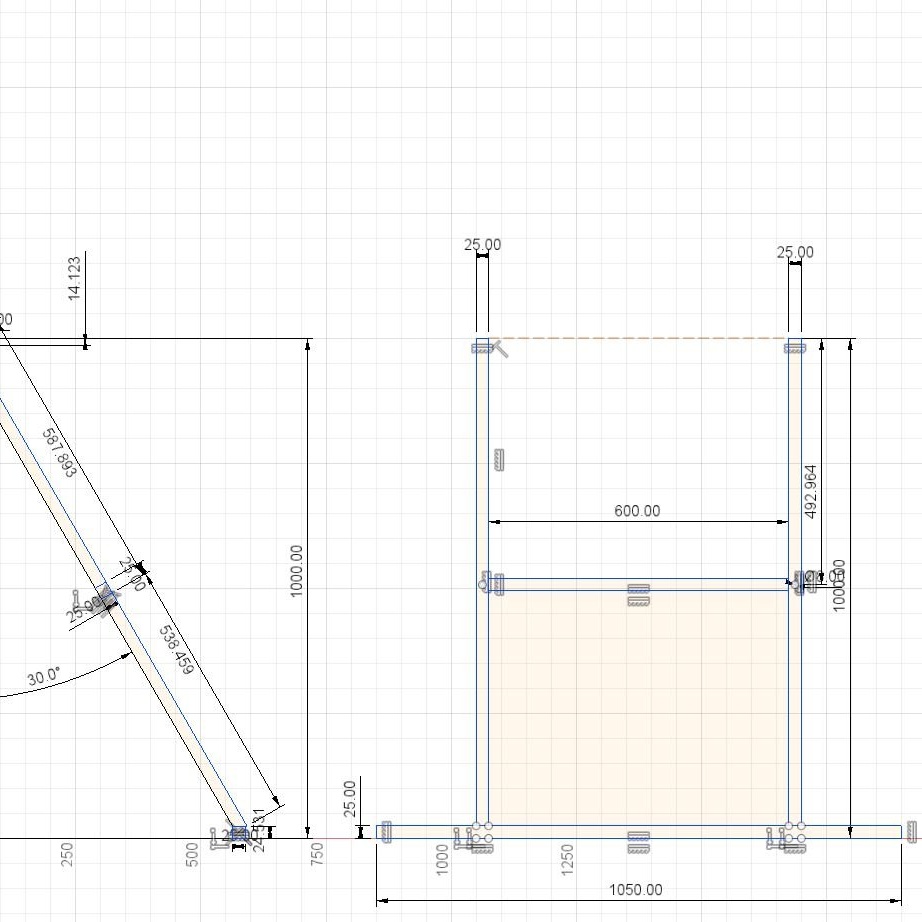
ขั้นตอนที่เจ็ด: สนับสนุนโปรไฟล์การสนับสนุน
หลังจากติดตั้งเครื่องยนต์โปรไฟล์สนับสนุนเริ่มโค้งงอ จากนั้นอาจารย์ก็พยายามสตาร์ทเครื่องยนต์และพบว่าโปรไฟล์นั้น "เดิน" มันเป็นสิ่งจำเป็นเพื่อเสริมสร้างการออกแบบ
การเพิ่มเพลทจะเพิ่มน้ำหนักให้กับโครงสร้างมากเกินไป จากนั้นอาจารย์ตัดสินใจออกแบบรูปตัววีจากตะกร้าลง เชือกจะแนบกับส่วนล่าง ปลายอีกด้านของสายเคเบิลจะถูกติดตั้งเข้ากับเครื่องหมายวงเล็บตรงกลางโปรไฟล์ที่รองรับ ดึงสายเคเบิลด้วยรอก ดังนั้นโครงสร้างจะแข็ง















ขั้นตอนที่แปด: เชื่อมต่อ
ก่อนอื่นนายบัดกรีเชื่อมต่อกับปลายสาย


จากนั้นเริ่มการติดตั้ง แต่ละเครื่องยนต์จะต้องตรวจสอบทิศทางการหมุน หากจำเป็นมันเป็นเรื่องง่ายที่จะเปลี่ยนทิศทางการหมุนของเครื่องยนต์และตามด้วยสกรูสลับสองสายสามสายที่มาจาก ESC ไปยังเครื่องยนต์ หลังจากมอเตอร์ทั้งหมดเชื่อมต่ออย่างถูกต้องตัวช่วยสร้างทำการติดตั้งตามแผนภาพการเชื่อมต่อจากผู้ผลิต
ตัวควบคุมการบิน IMU DJI A3 นั้นไวต่อการรบกวนจากโลหะมากและอาจารย์ไม่สามารถกำหนดค่าระบบได้เนื่องจากการรบกวน ดังนั้นต้นแบบแทนที่ A3 ด้วย Naza M V2 ซึ่งมีรูปแบบการเชื่อมต่อที่คล้ายกัน Naza M V2 ทำงานได้อย่างน่าเชื่อถือมาก
จากนั้นตัวช่วยสร้างจะเชื่อมต่อแบตเตอรี่ ในโปรไฟล์ผู้ให้บริการแต่ละรายจะมีการเชื่อมต่อแบตเตอรี่ 22.2 V สองก้อนในซีรีย์



ขั้นตอนที่เก้า: ที่นั่งนักบิน
ที่นั่งถูกเย็บจากผ้าที่ทนทาน นอกจากนี้เข็มขัดนิรภัยจะติดอยู่กับนักบินซึ่งติดอยู่กับกรอบและหมวกนิรภัย






ขั้นตอนที่สิบ: เที่ยวบินแรก
ก่อนการบินของนักบินบน octocopter มีการทดสอบหลายครั้งด้วยกระสอบทรายและแบบจำลองของบุคคล ในระหว่างการบินสถานการณ์ต่าง ๆ ถูกจำลองจากการสูญเสียการควบคุมไปจนถึงลมกระโชก
หลังจากการทดสอบทั้งหมดนักบินก็บินขึ้นไปในอากาศ






ก่อนบินคุณต้องดำเนินการต่อไปนี้
ตรวจสอบความแน่นของสลักเกลียวสายเคเบิลการติดตั้งเครื่องยนต์
ตรวจสอบสายไฟ
ตรวจสอบว่าสกรูหมุนได้ง่าย
ตรวจสอบให้แน่ใจว่าได้ตั้งค่า ESC ทั้งหมดเป็นปิดแล้ว
ตรวจสอบให้แน่ใจว่ามีการต่อและชาร์จแบตเตอรี่อย่างปลอดภัย
เชื่อมต่อกำลังไฟเข้ากับชุดควบคุมการบินเพื่อเริ่มต้นและปรับเทียบ
หลังจากเชื่อมต่อกับ GPS แล้วมันจะเปลี่ยนเป็นโหมดอัตโนมัติเต็มรูปแบบ (Alt. + Att. Hold)
นั่งในที่นั่งนักบินและหัวเข็มขัดขึ้น
เชื่อมต่อแบตเตอรี่ทั้งหมดเข้ากับ ESC
เชื่อมต่อแบตเตอรี่สองก้อนเป็นอนุกรม (ESC-RB-RB-ESC) โดยใช้ตัวต้านทานเพื่อกำจัดประกายไฟ
เปิดมอเตอร์โดยหมุนสวิตช์ไปที่ตำแหน่งเปิด
ใช้ตัวควบคุมเพื่อควบคุม octocopter