




หลายคนเคยได้ยินหรือเห็นหูที่ฉลาดของ "เนโคมิมิ" หูดังกล่าวตอบสนองต่ออารมณ์ของเจ้าของและตอบสนองต่อมัน หลักการทำงานของอุปกรณ์นั้นขึ้นอยู่กับการถอดรหัสของกิจกรรมสมองมนุษย์ อุปกรณ์ดังกล่าวมีราคาประมาณ 6,000 tr
ตัวช่วยสร้างตัดสินใจทำอุปกรณ์ที่คล้ายกัน จริงแล้วหูแมวนั้นควบคุมโดยใช้ปุ่ม แต่ราคาของมันลดลงตามลำดับ โดยวิธีการที่หูสามารถไม่เพียง แต่แมว แต่มีเท่าไหร่จินตนาการของคุณก็เพียงพอ
ลองดูวิดีโอพร้อมตัวอย่างของการใช้งานอุปกรณ์ดังกล่าว
ในการสร้างหูเคลื่อนไหวนั้นอาจารย์จำเป็นต้องมีสิ่งต่อไปนี้
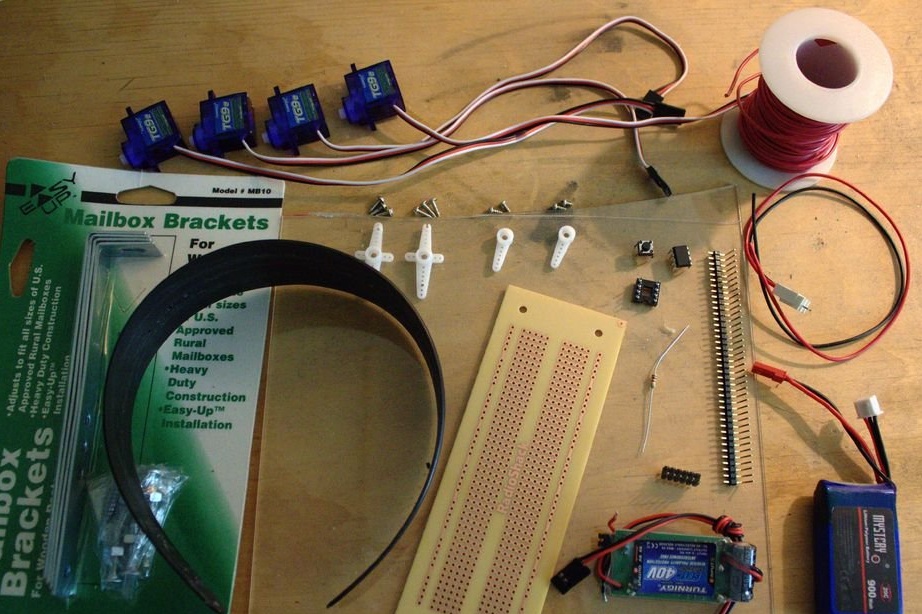
เครื่องมือและวัสดุ:
- ปืนสีฟ้า;
-Dremel;
- ไขควง
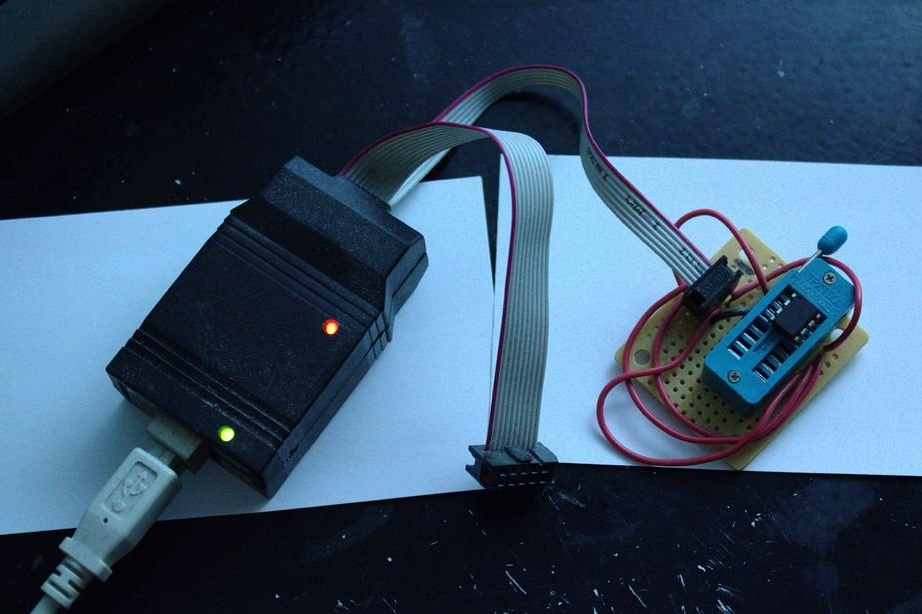
- USB โปรแกรมเมอร์สำหรับ AVR;
-Kusachki;
- อุปกรณ์เสริมสำหรับทิ้ง;
ไมโครคอนโทรลเลอร์ ATTiny13;
- Servo-4 ชิ้น
seeing-;
-Button;
- ตัวต้านทาน 1 kOhm;
- แบตเตอรี่ลิเธียมโพลิเมอร์ 800 mAh;
- แหล่งจ่ายไฟ;
- ฝาพลาสติก
- สี่มีสีดำสีขาว
-Akril;
-Kley;
- เครื่องปั่น
-Izolenta;
- ขยะกระดาษ
-Bumaga;
- กรรไกร
-Nitka;






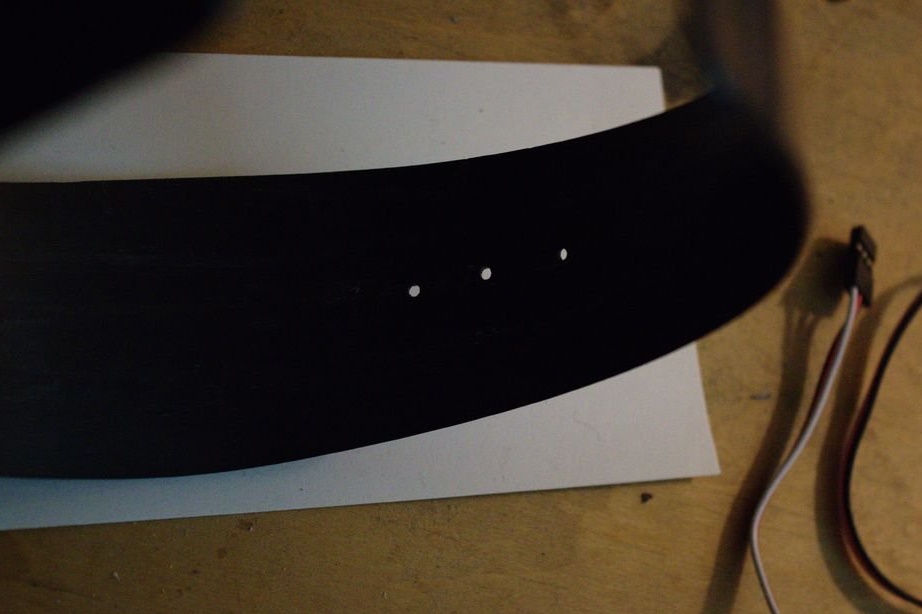
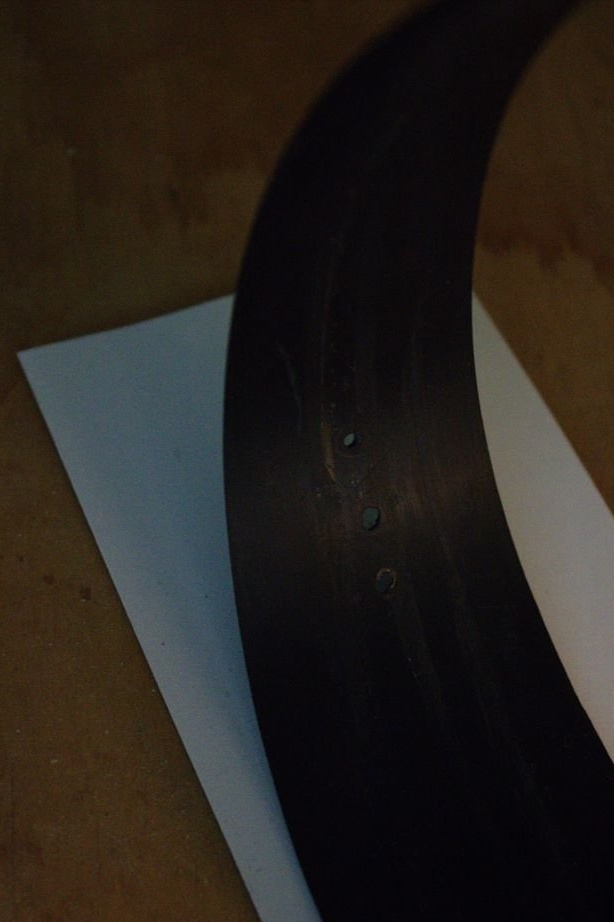
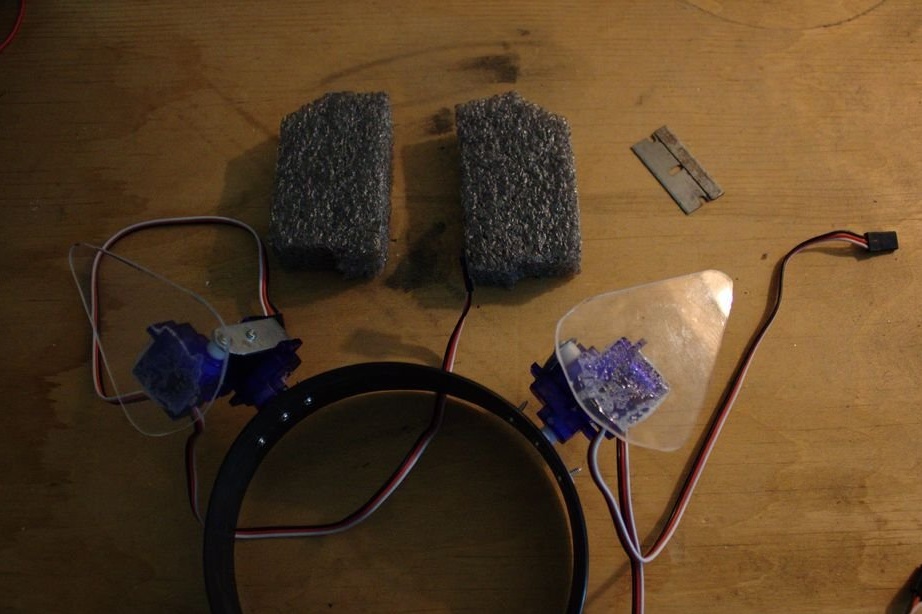
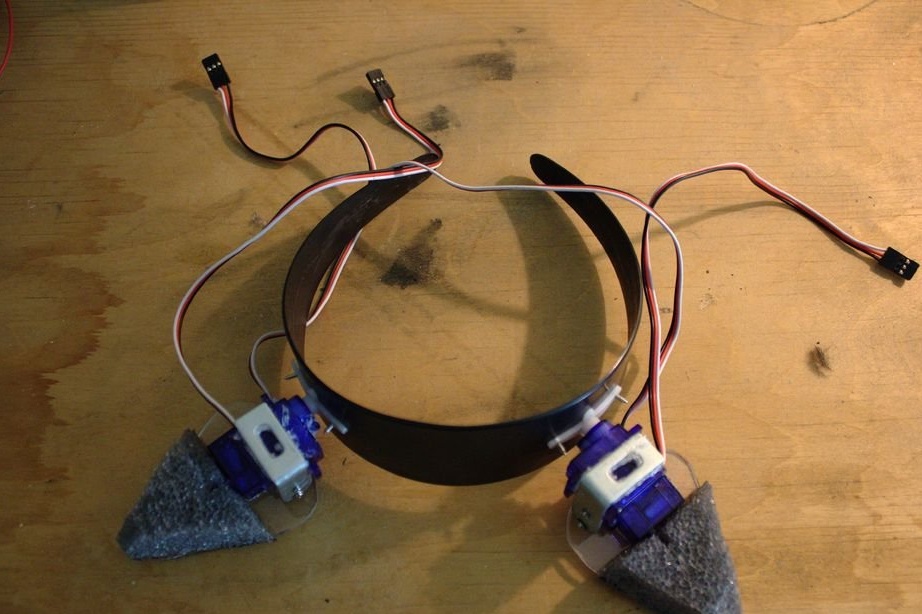
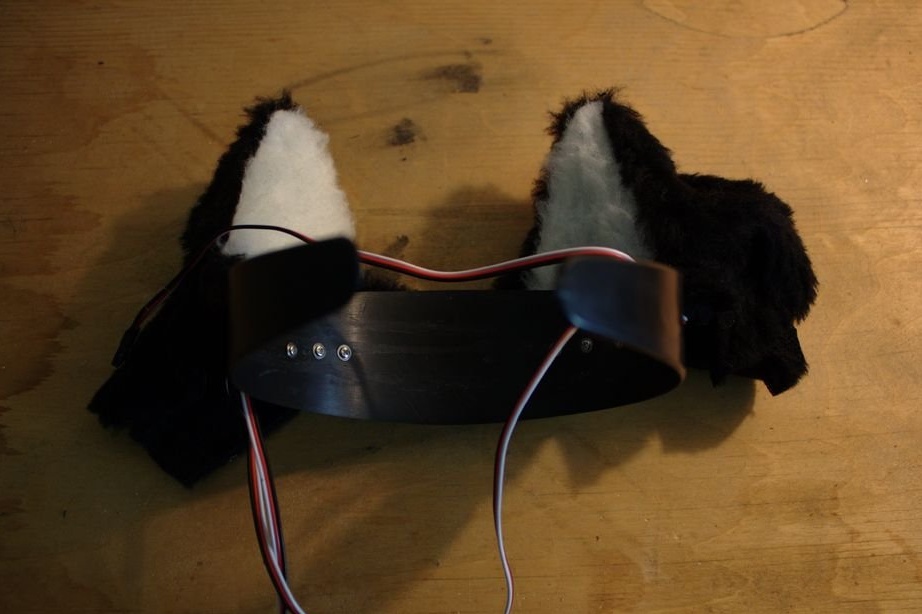
ขั้นตอนที่หนึ่ง: Bezel
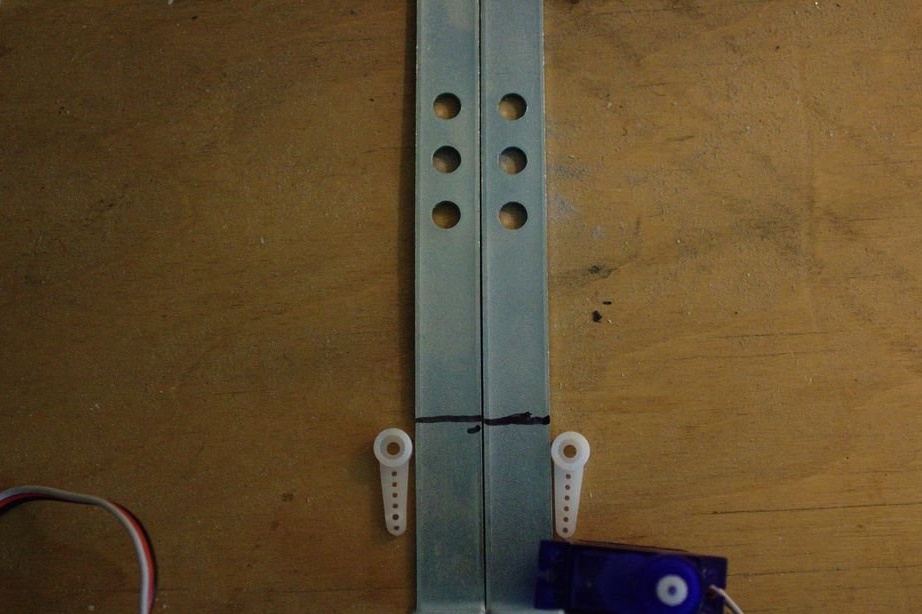
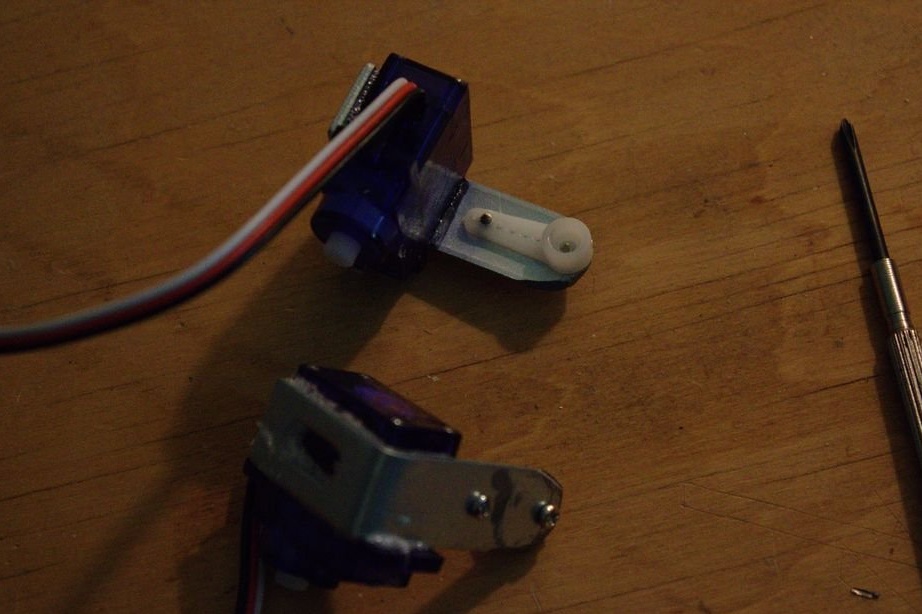
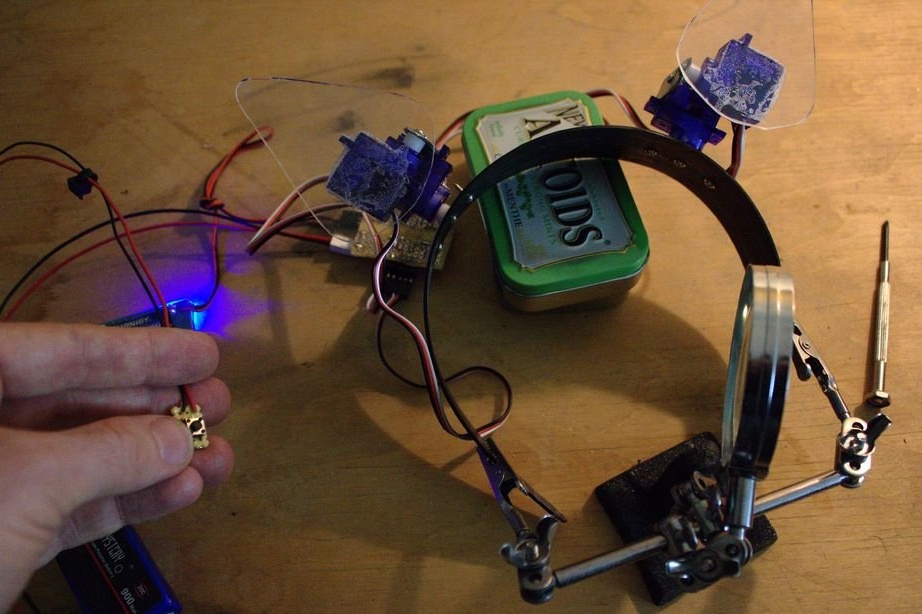
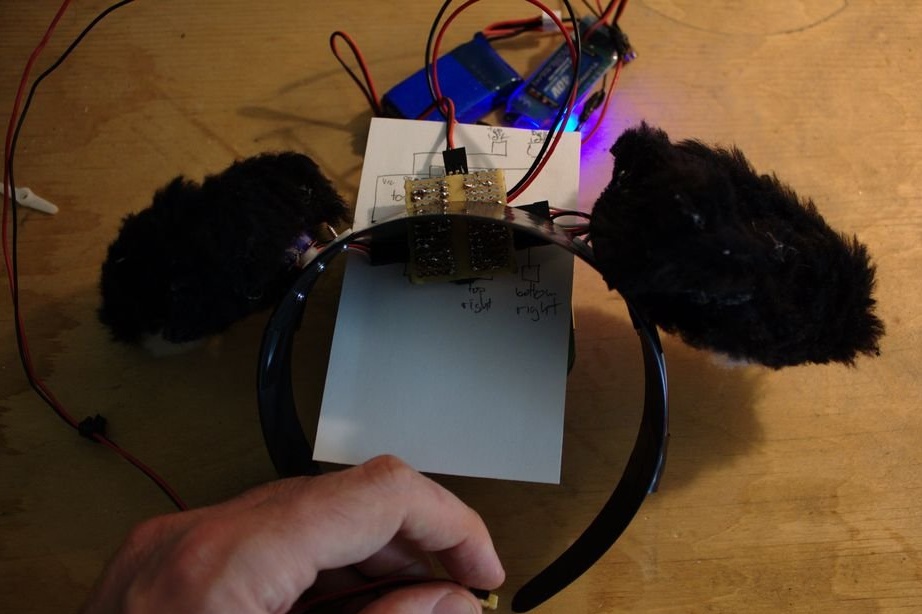
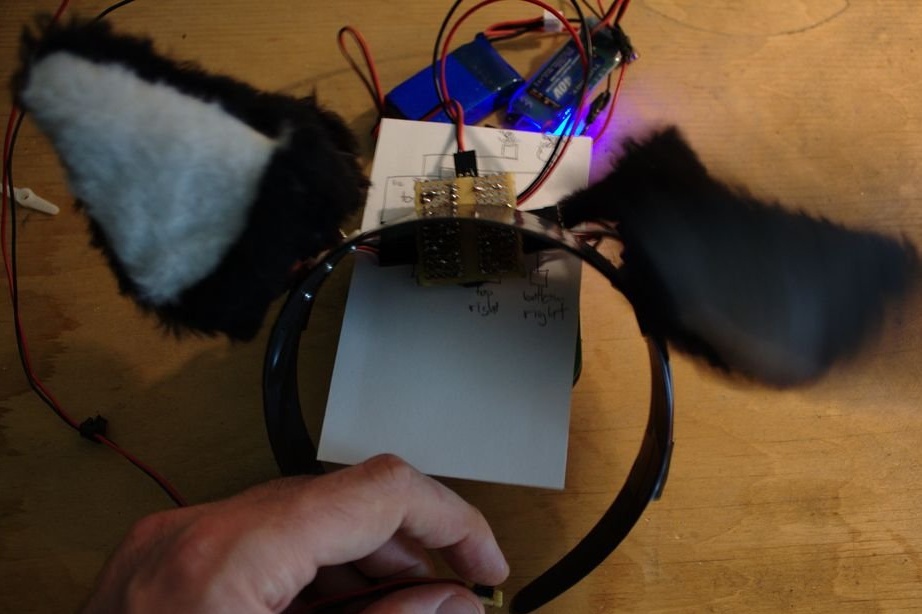
สำหรับฐานนั้นเจ้านายก็เอารัดผม ขอบควรแข็งพอ ก่อนอื่นตัวช่วยสร้างจะทำเครื่องหมายตำแหน่งการติดตั้งของเซอร์โว มีสี่เซอร์โวเท่านั้น สองมีหน้าที่ในการเคลื่อนย้ายซ้าย / ขวาและแนบโดยตรงกับขอบทั้งสองมีความรับผิดชอบในการเลื่อนขึ้น / ลงและถูกแนบไปกับเซอร์โวแรก เซอร์โวแรกติดตั้งเข้ากับขอบโดยใช้แผ่นยึดโดยที่แกนลงคือเช่น เซอร์โวจะขยับไม่ใช่แกน ต้นแบบติดตั้งแผ่นยึดบนไดรฟ์เซอร์โวและทำเครื่องหมายสามรูที่ด้านข้างของขอบ
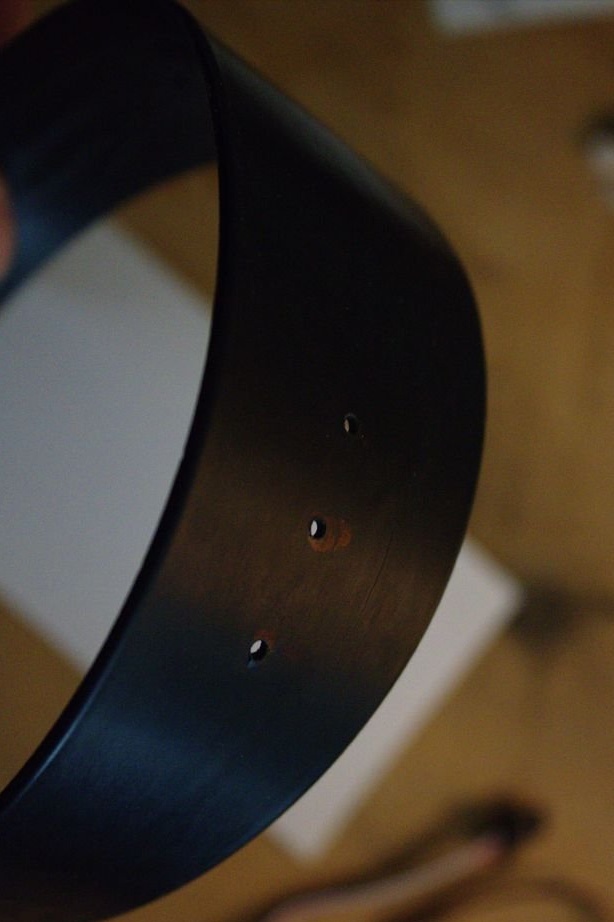
ถัดไปคุณต้องซ่อมเซอร์โวเพื่อให้แน่ใจว่าร่างกายไม่จับขอบขณะหมุน

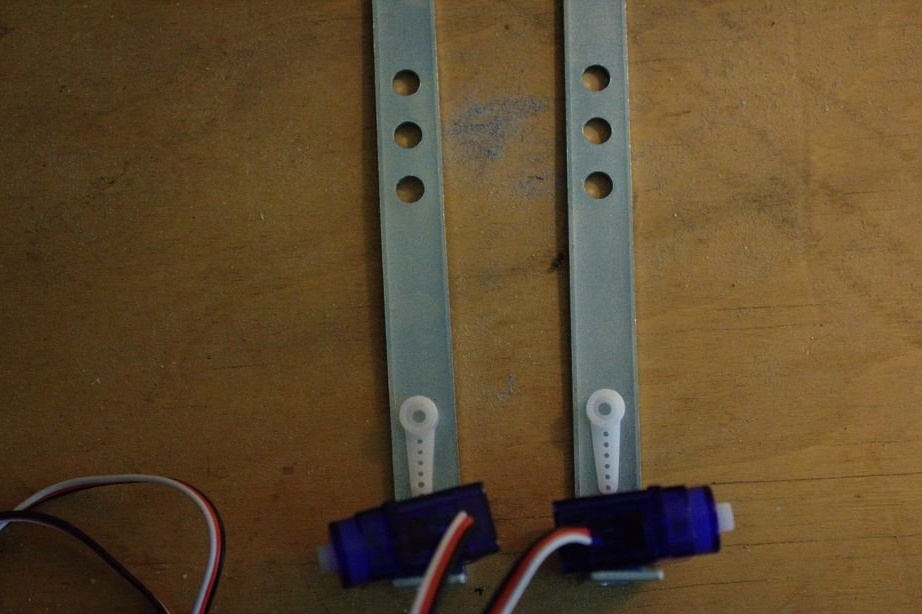
ขั้นตอนที่สอง: เมานต์
ตอนนี้คุณต้องติดตั้งสำหรับเซอร์โวที่สอง ต้นแบบของเขาทำมาจากตัวยึด ทำเครื่องหมายและตัดความยาวที่ต้องการ เจาะรู กาวมุมให้กับไดรฟ์






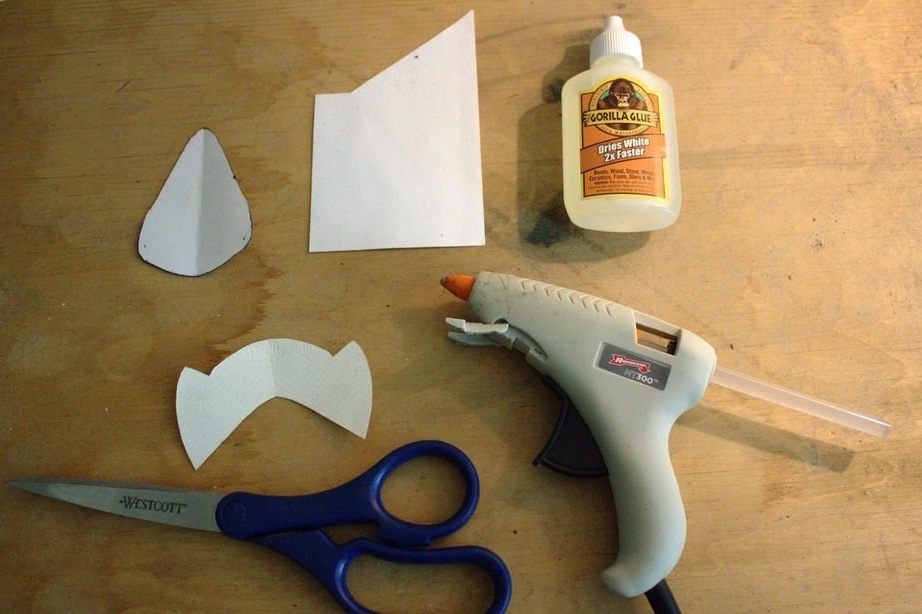
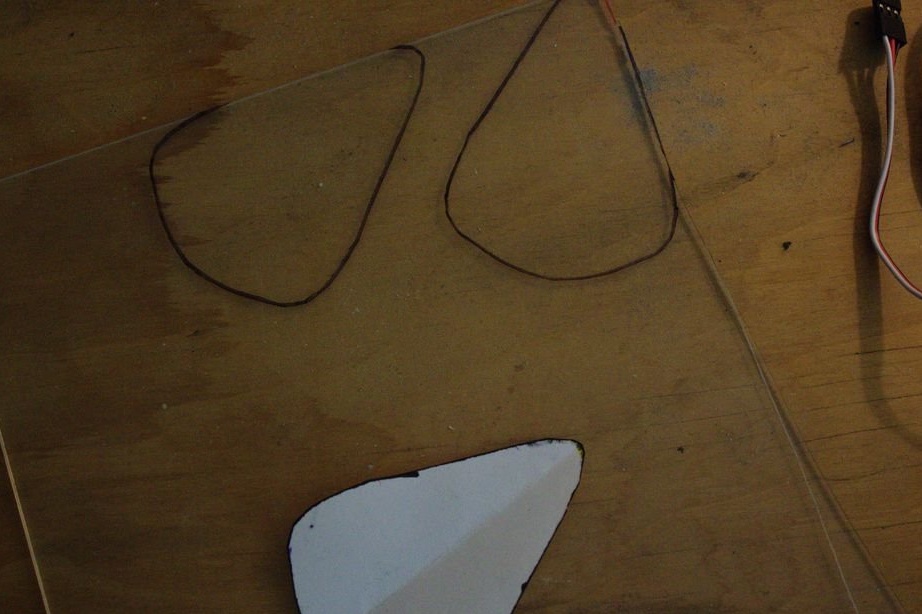
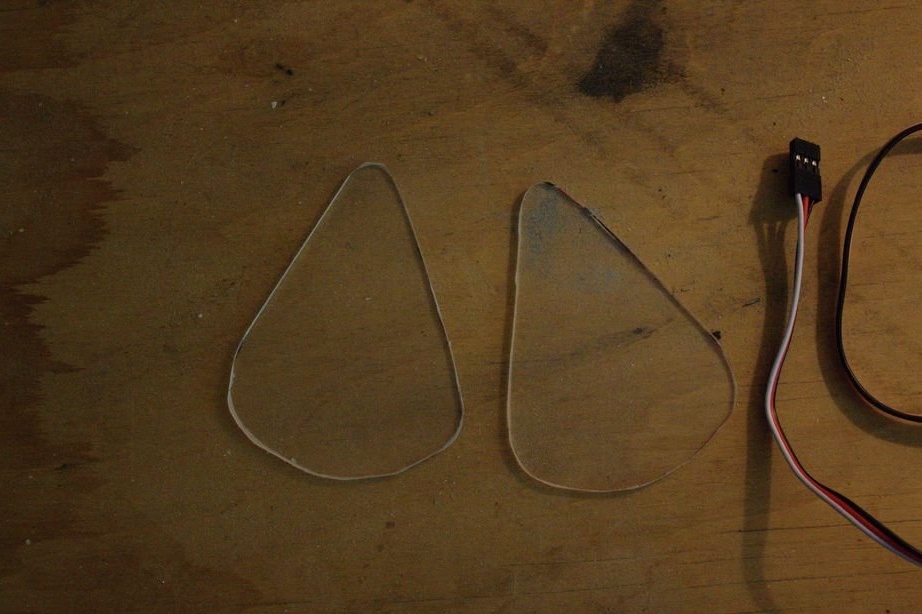
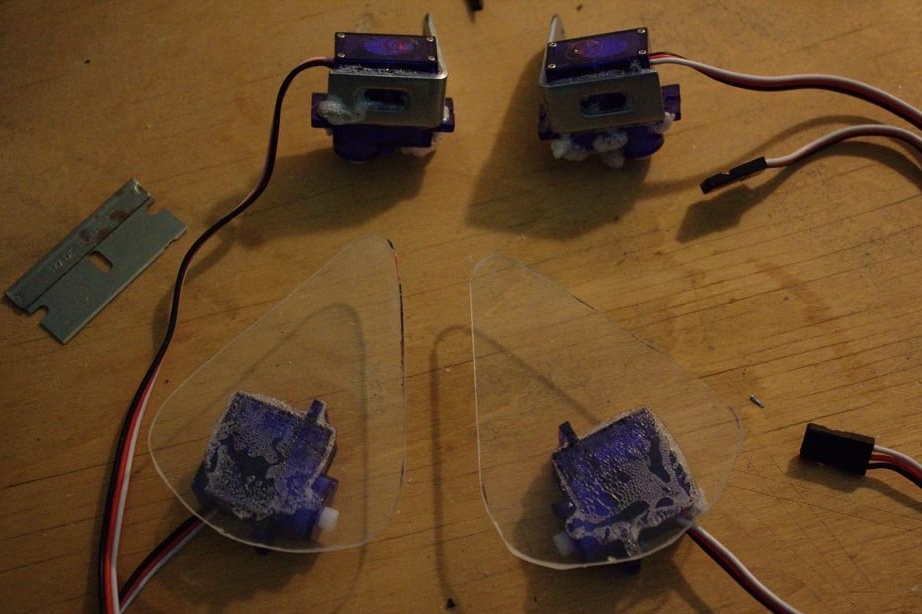
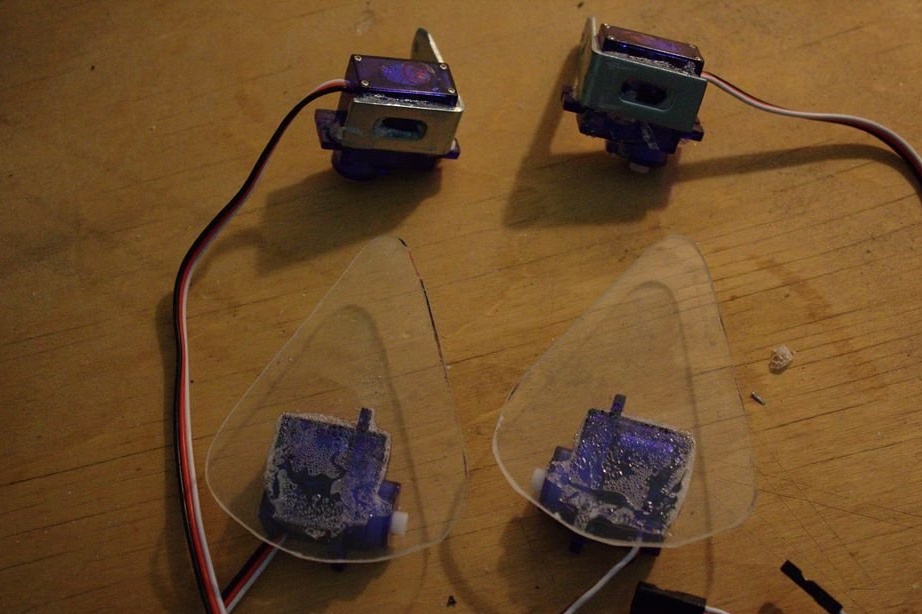
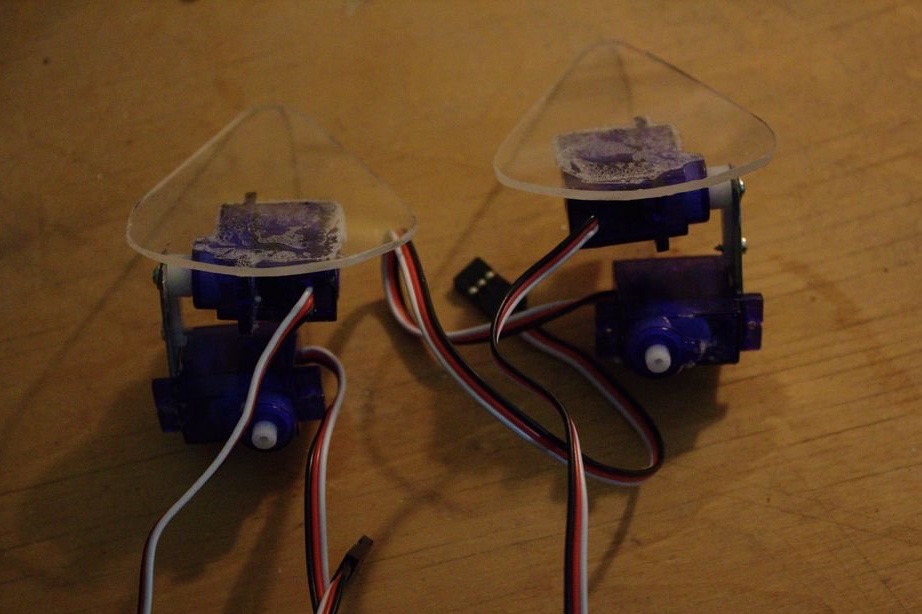
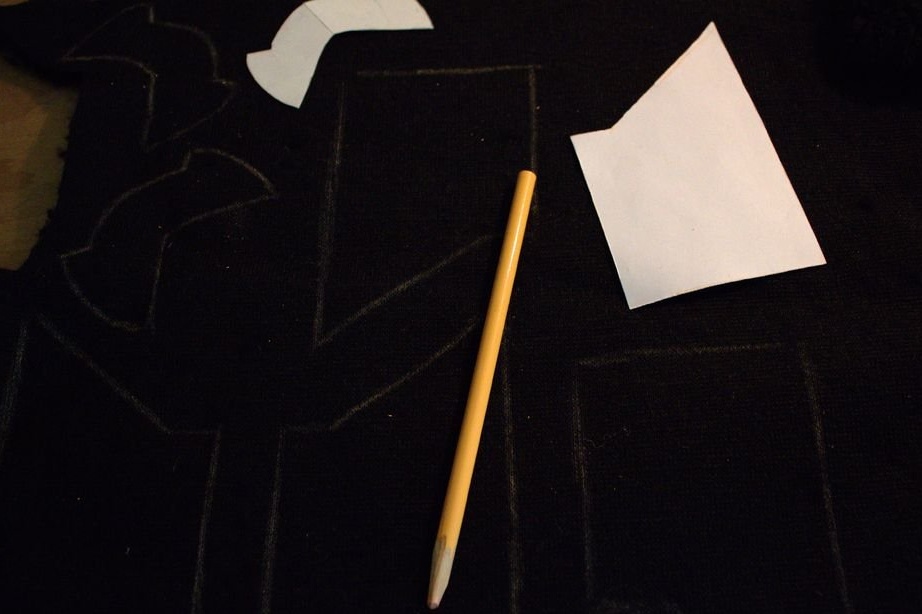
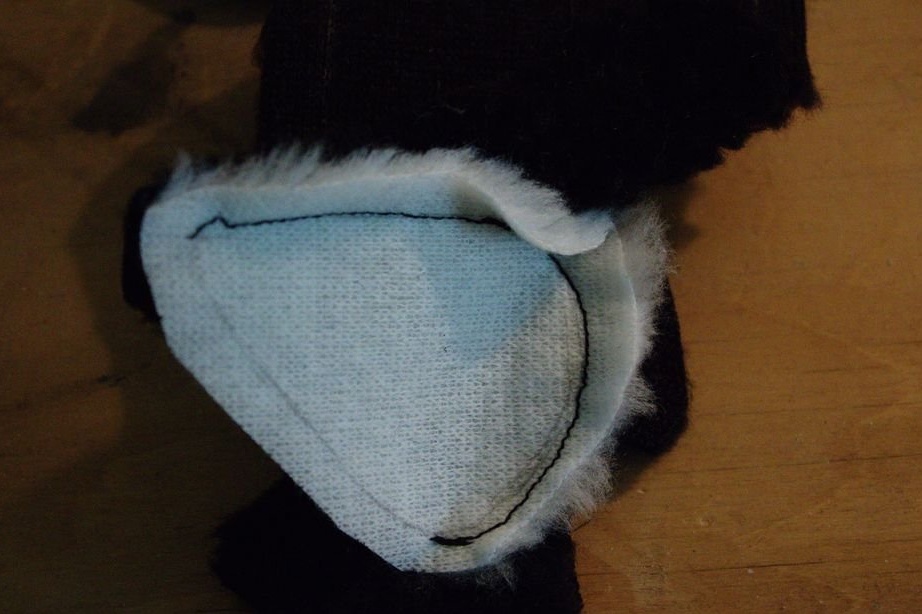
ขั้นตอนที่สาม: ฐานหู
ตัดแม่แบบกระดาษออกมา ตามรูปแบบมันตัดฐานหูจากอะคริลิคกาวฐานไปยังเซอร์โวที่สอง (ขึ้น / ลง) เมื่อทำการดำเนินการนี้คุณต้องตรวจสอบให้แน่ใจว่าฐานจะไม่แตะต้องส่วนอื่น ๆ ของอุปกรณ์จากนั้นจึงทำการยึดติดเท่านั้น


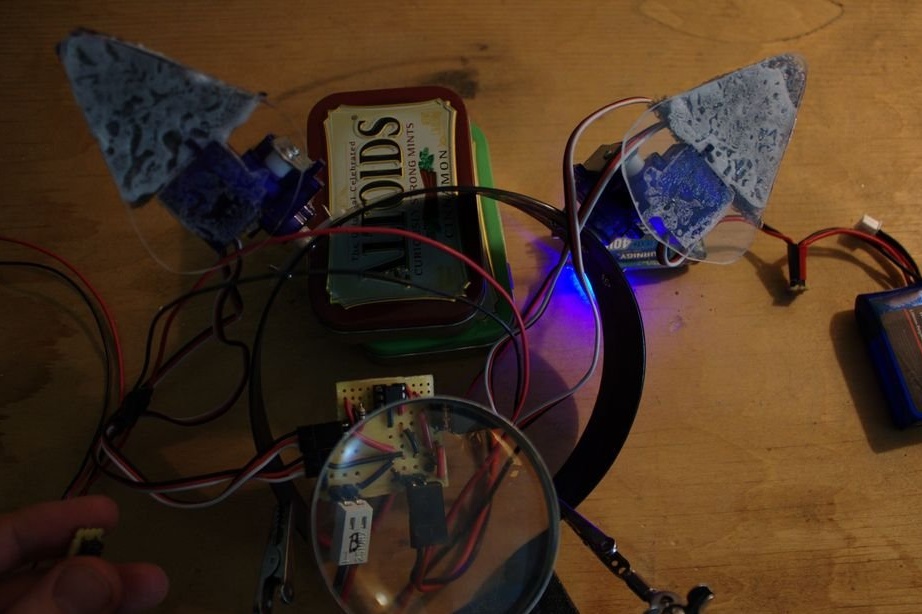
ขั้นตอนที่สี่: การติดตั้ง
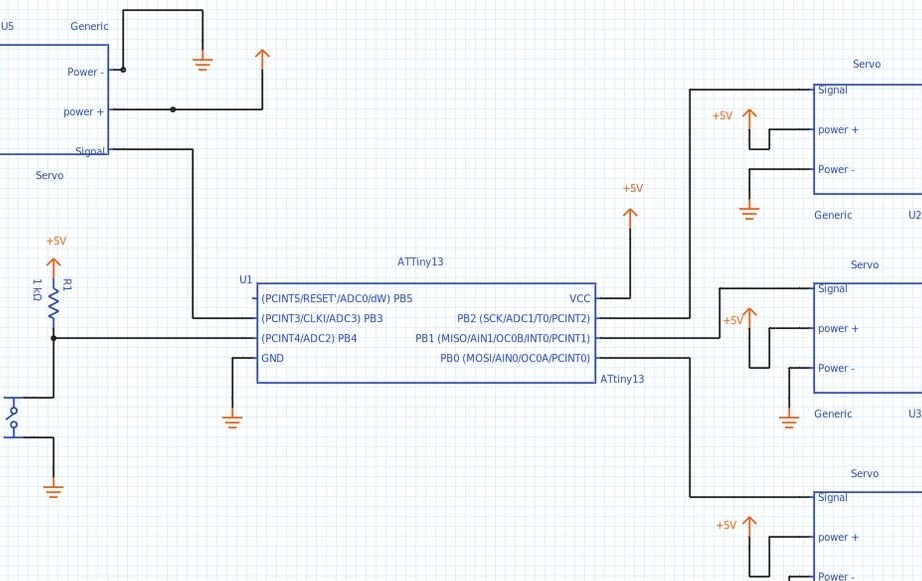
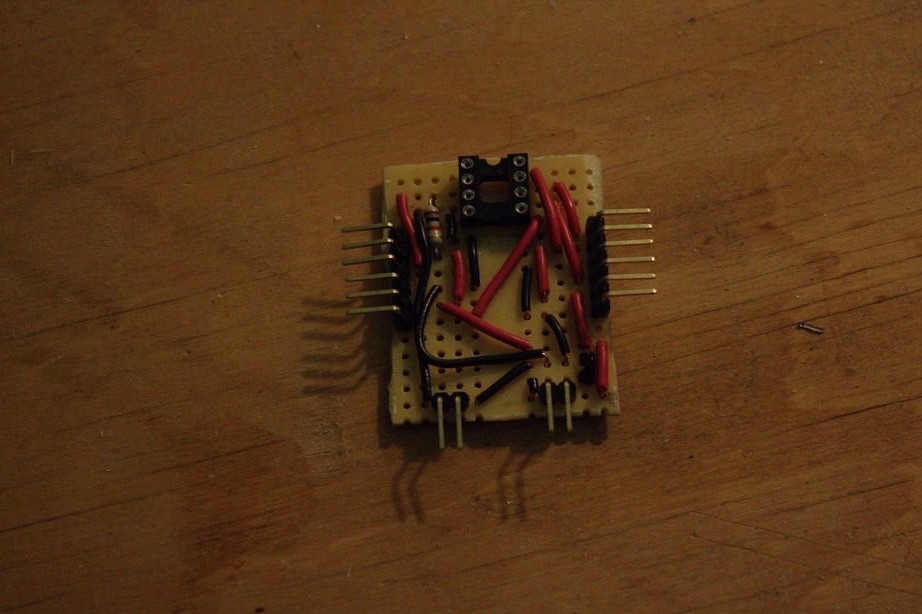
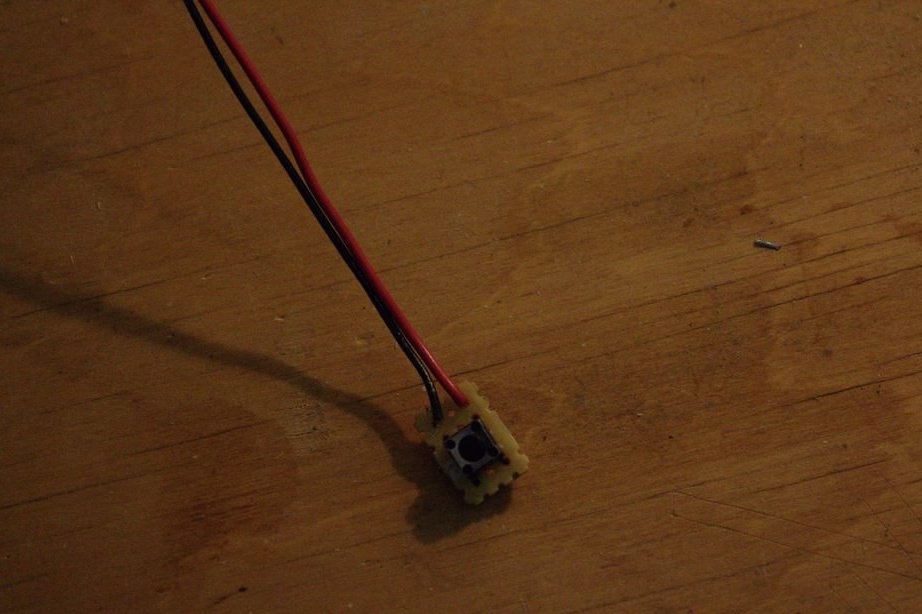
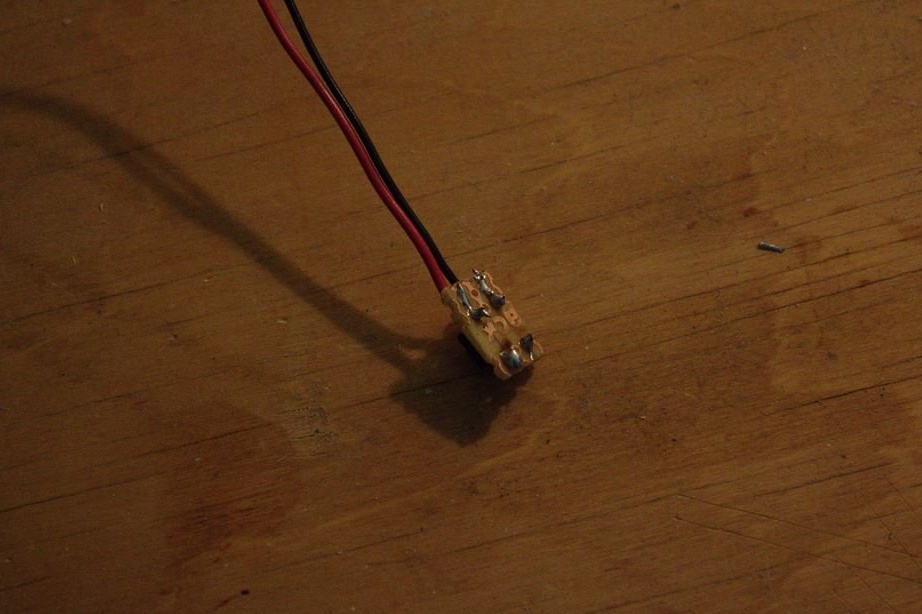
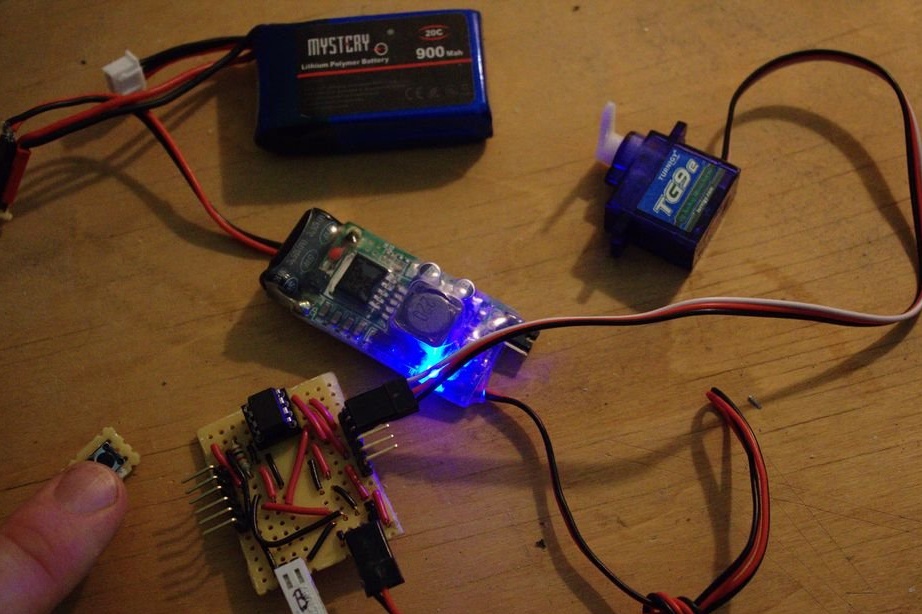
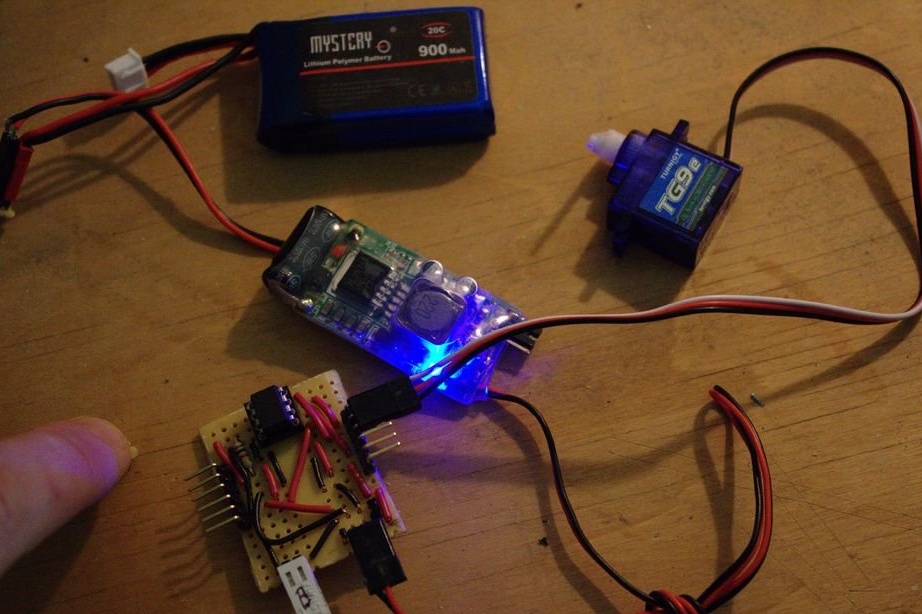
ทำการติดตั้งตามแบบแผน ไมโครคอนโทรลเลอร์ติดตั้งบนเขียงหั่นขนม นอกจากนี้ยังติดตั้งตัวเชื่อมต่อสำหรับอุปกรณ์ต่อพ่วงหกตัวในแต่ละด้านสำหรับไดรฟ์เซอร์โวสองตัวสำหรับปุ่มภายนอกและอีกสองตัวสำหรับจ่ายไฟ ไมโครสวิทซ์ติดตั้งบนเขียงหั่นขนมแยกต่างหาก ปุ่มจะอยู่ในระยะไกลและสายควรจะยาว
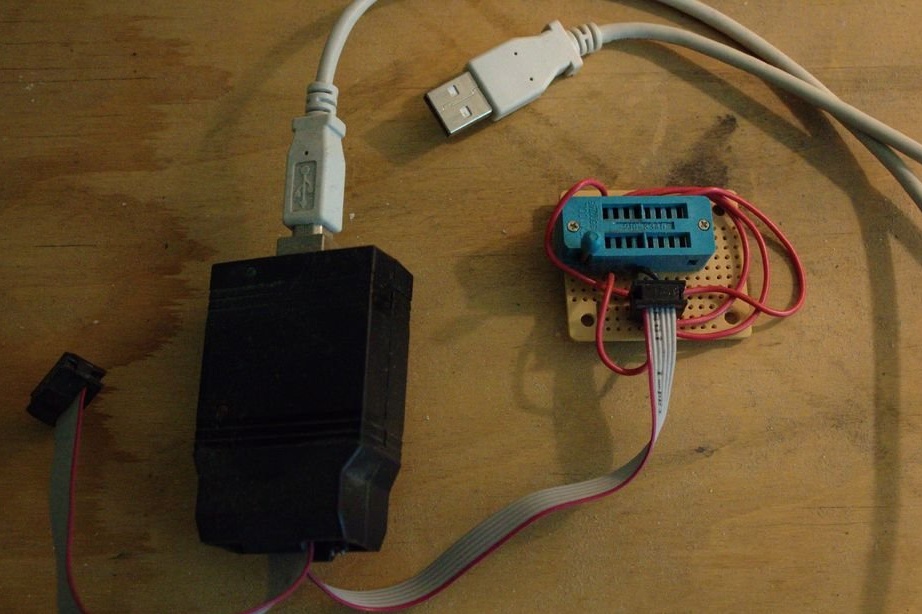
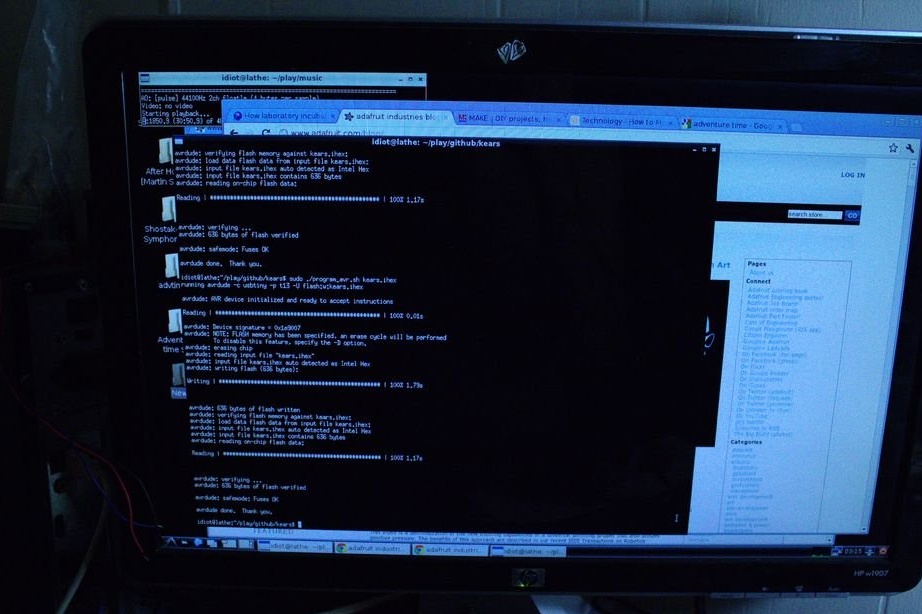
ขั้นตอนที่ห้า: การเขียนโปรแกรม
ตอนนี้คุณสามารถตั้งโปรแกรมไมโครคอนโทรลเลอร์ รหัสมีอยู่ที่ลิงค์นี้ https://github.com/abetusk/kears/blob/release/kears.ihex .
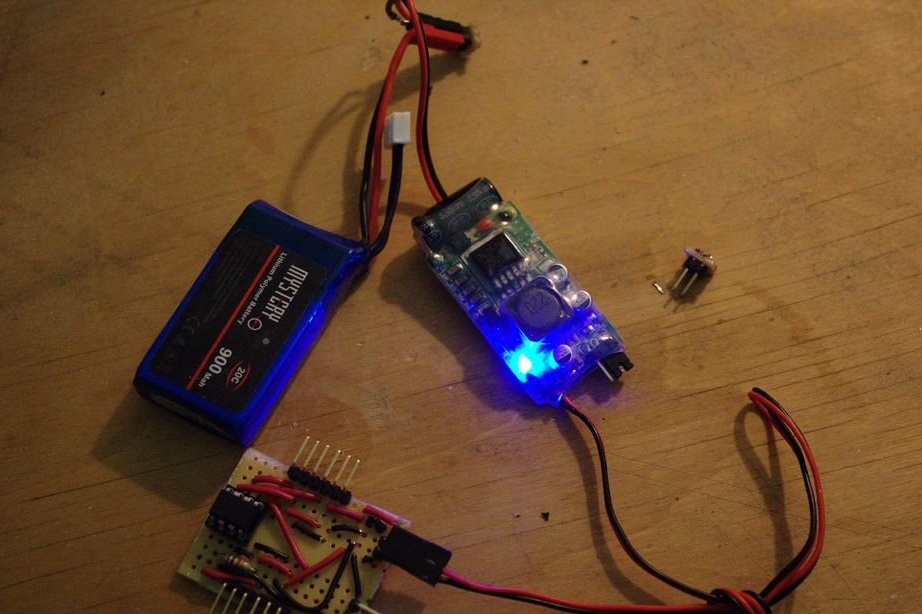
หลังจากดาวน์โหลดรหัสคุณจะต้องเชื่อมต่อไดรฟ์เซอร์โวแบตเตอรี่และตรวจสอบการทำงานของอุปกรณ์ ด้วยเซอร์โวคุณจะต้องตรวจสอบคำสั่งทั้งหมดด้วยการเชื่อมต่อสลับกับตัวเชื่อมต่อ การกดปุ่มแต่ละครั้งควรเปิดไฟเซอร์โว
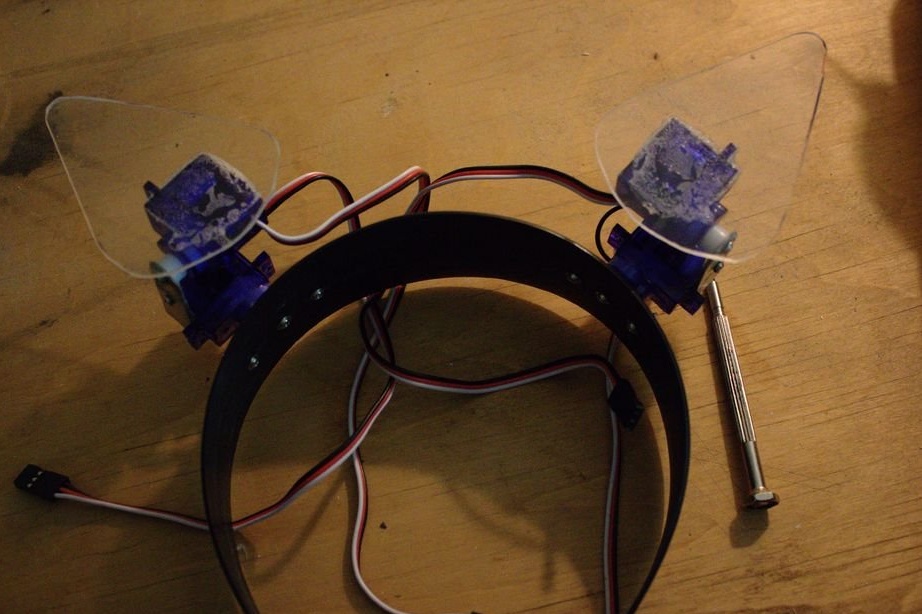
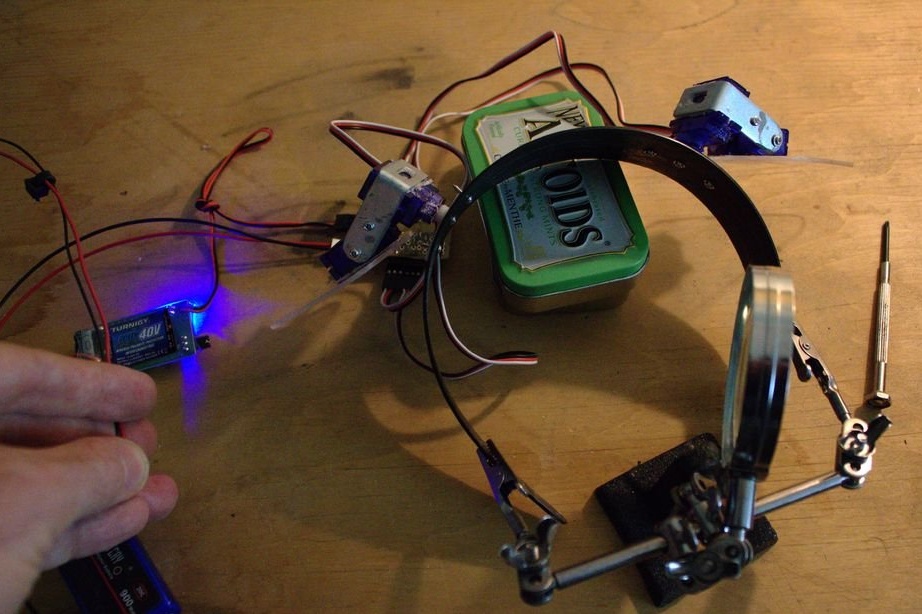
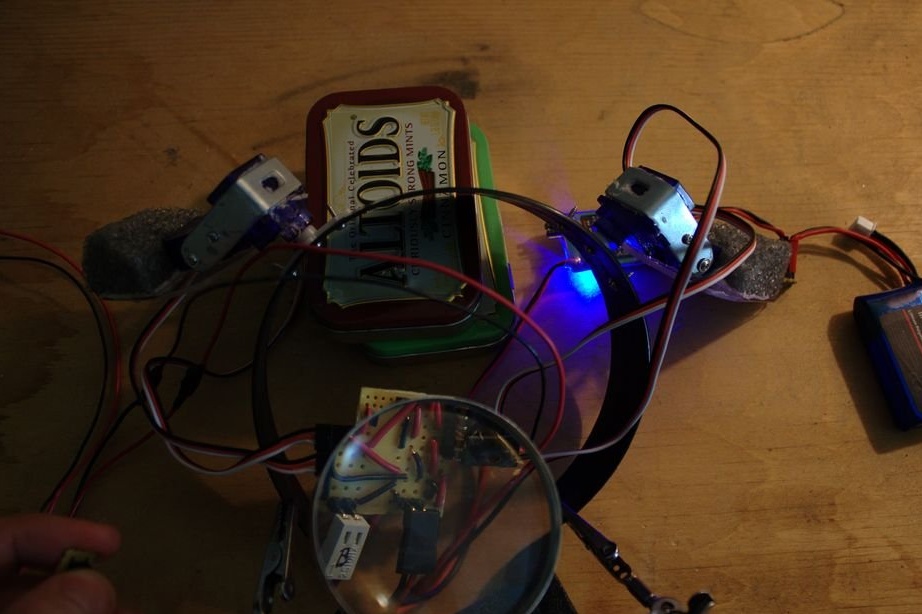
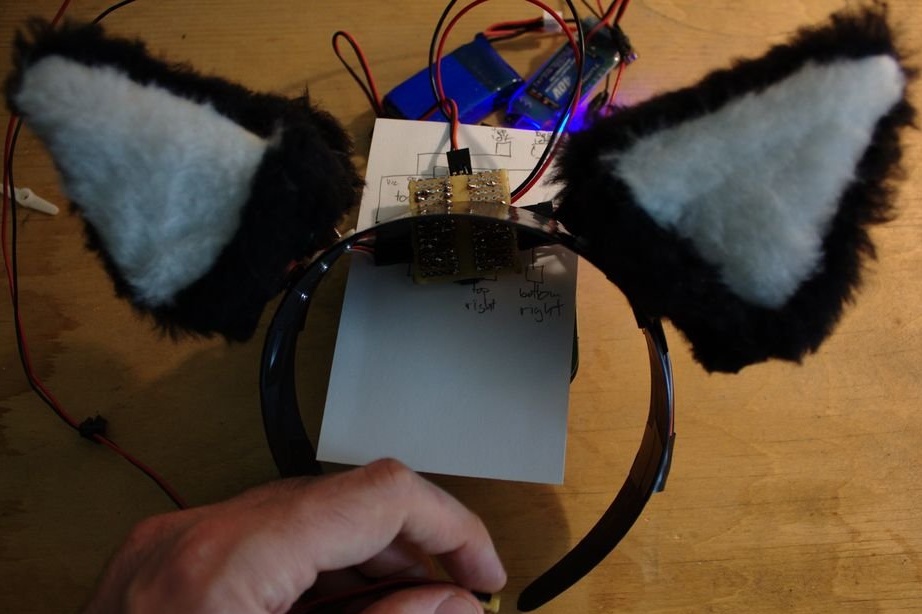
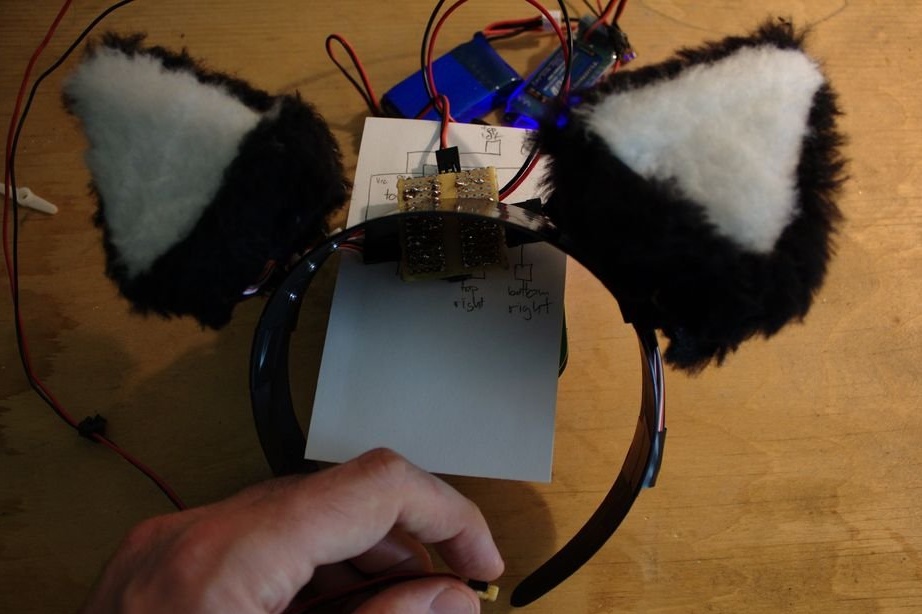
ขั้นตอนที่หก: ติดตั้งไดรฟ์เซอร์โว
ตอนนี้คุณต้องติดตั้งเซอร์โวบนขอบ ยึดเซอร์โวที่สอง มันเป็นสิ่งสำคัญที่จะต้องตั้งเซอร์โวให้อยู่ในตำแหน่งเริ่มต้น จากนั้นคุณต้องเชื่อมต่อเซอร์โวกับบอร์ด เซอร์โวทั้งหมดมีสามสาย: สีดำหรือสีน้ำตาลสำหรับกราวด์, สีแดงสำหรับพลังงาน (~ 4.8-6 V), สีเหลือง, สีส้มหรือสีขาวสายสัญญาณ (3-5 V) การเชื่อมต่อเซอร์โวกับไมโครคอนโทรลเลอร์เกี่ยวข้องกับโครงร่างต่อไปนี้:
Pin 5 (PB0) - เซอร์โวขวาล่าง
พิน 2 (PB3) - ขวาบน
ขา 6 (PB1) - ซ้ายล่าง
พิน 7 (PB2) - ซ้ายบน
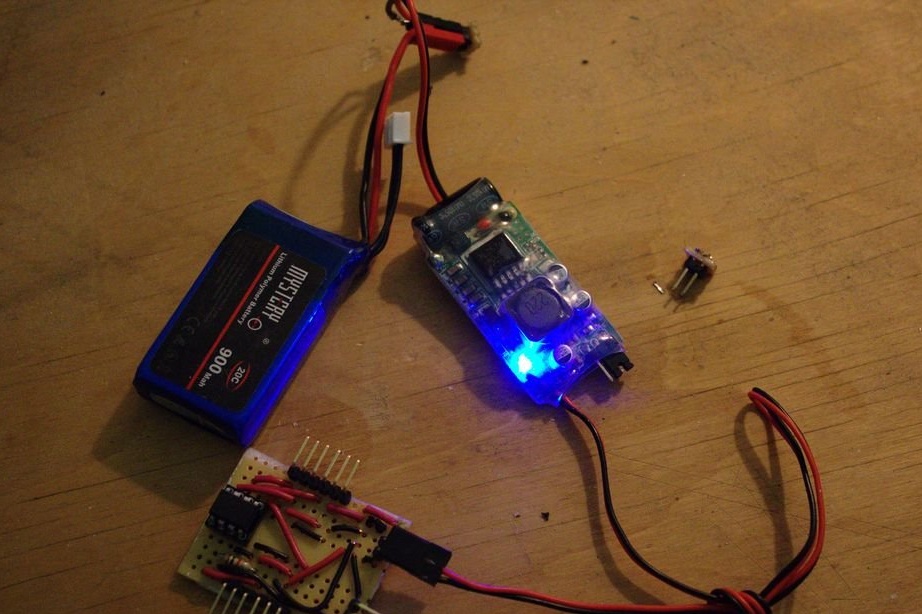
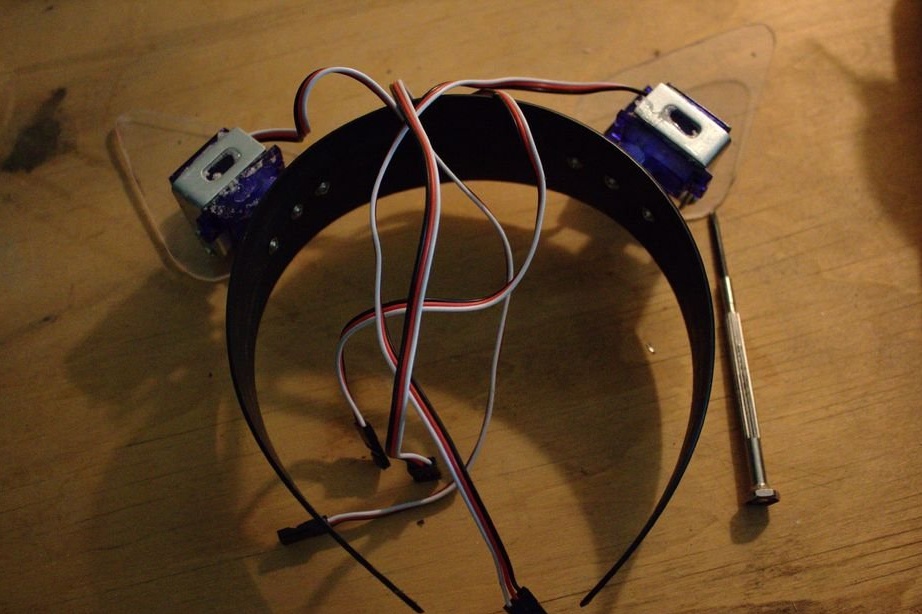
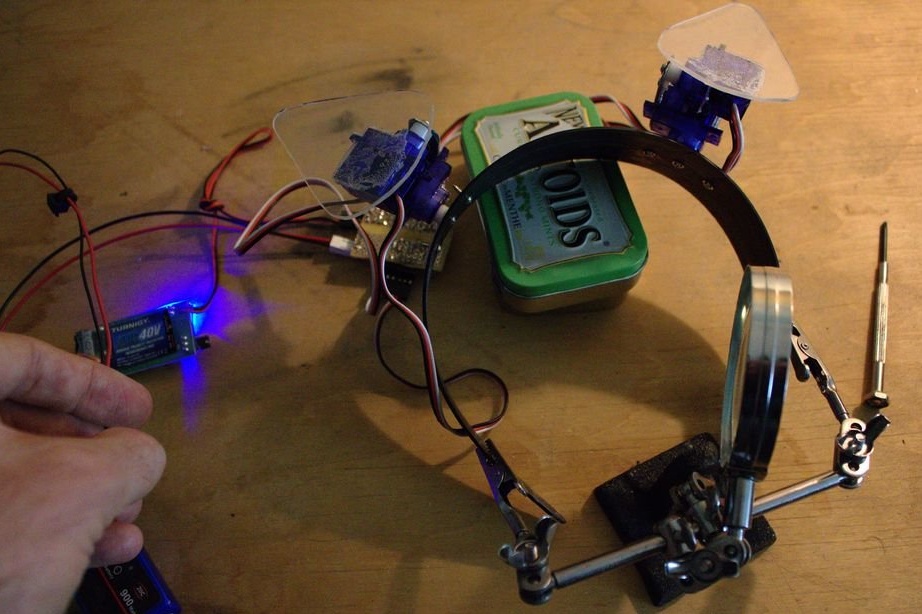
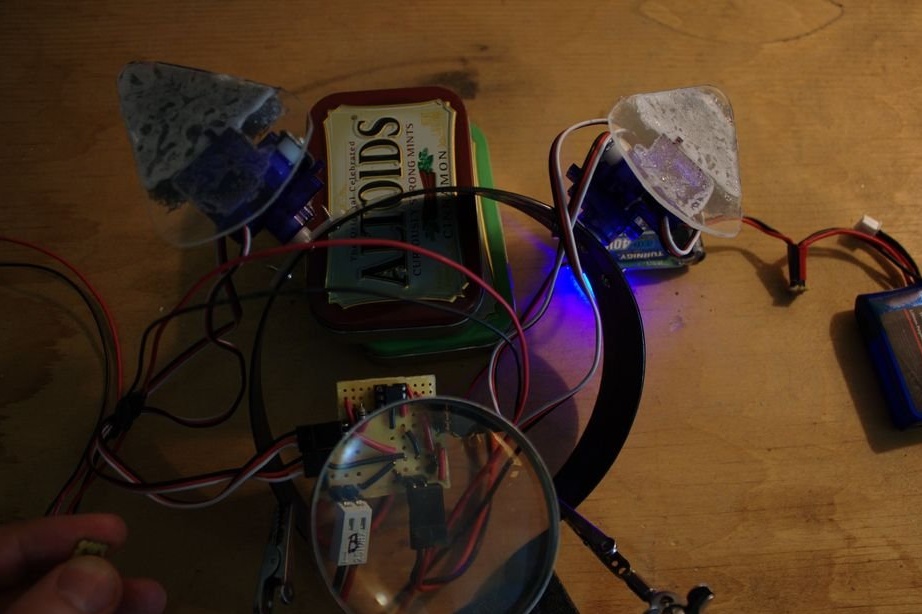
หลังจากเชื่อมต่อทุกอย่างแล้วคุณต้องเปิดพลังของวงจรโดยเชื่อมต่อแบตเตอรี่เข้ากับตัวควบคุมและตัวควบคุมกับวงจร ในขณะที่วงจรเปิดอยู่เซอร์โวแต่ละตัวจะถูกจัดวางเพื่อให้อยู่ในตำแหน่งเริ่มต้นที่ต้องการ เซอร์โวฐานควรหันไปข้างหน้าและเซอร์โวด้านบนควรมีอะคริลิค (ฐาน) ในระนาบเดียวกับใบหน้า
หลังจากทุกอย่างได้รับการตั้งค่าและเชื่อมต่อแล้วมันจะทำการเคลื่อนไหวตามที่ระบุไว้เพื่อให้แน่ใจว่าพวกเขาสามารถเคลื่อนไหวได้อย่างเต็มรูปแบบโดยไม่ต้องกดปุ่มใด ๆ
การกดปุ่มมีดังต่อไปนี้: กดค้างไว้, กดสองครั้งที่ปุ่มค้างไว้, กดสามครั้ง แต่ละการกระทำเหล่านี้ให้คำสั่งสำหรับการเคลื่อนไหวที่เฉพาะเจาะจง
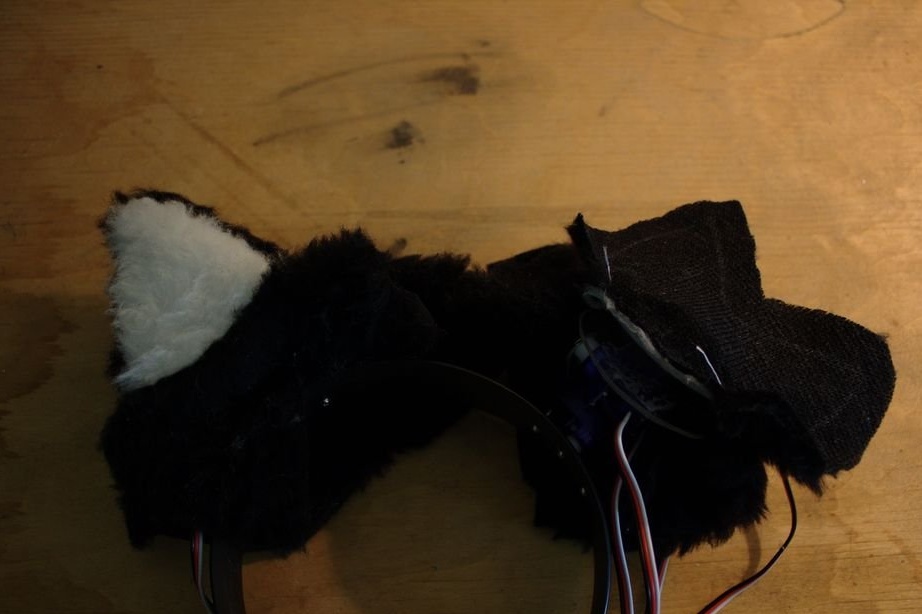
ขั้นตอนที่เจ็ด: กรณี
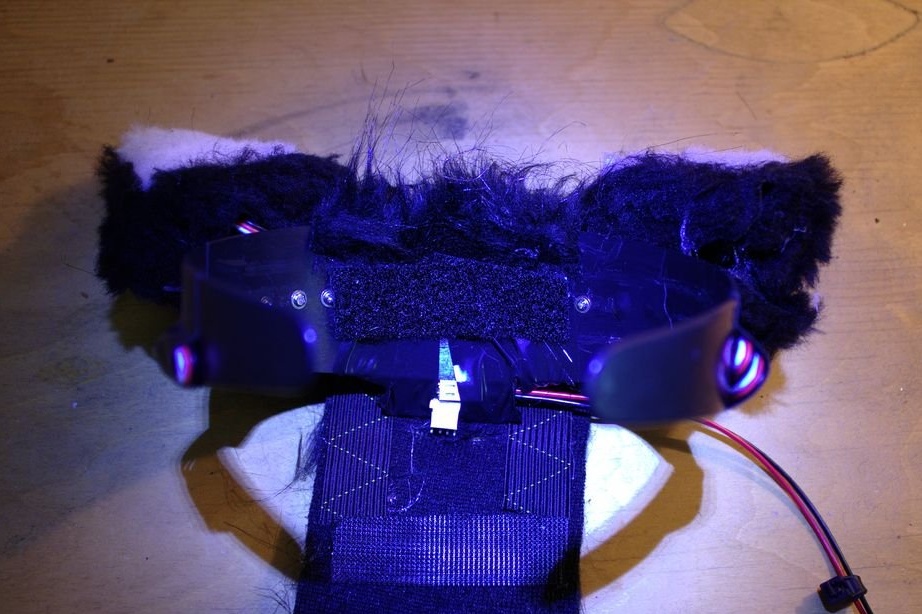
ตอนนี้คุณสามารถหุ้มหูด้วยขนสัตว์ให้แมวของพวกเขา









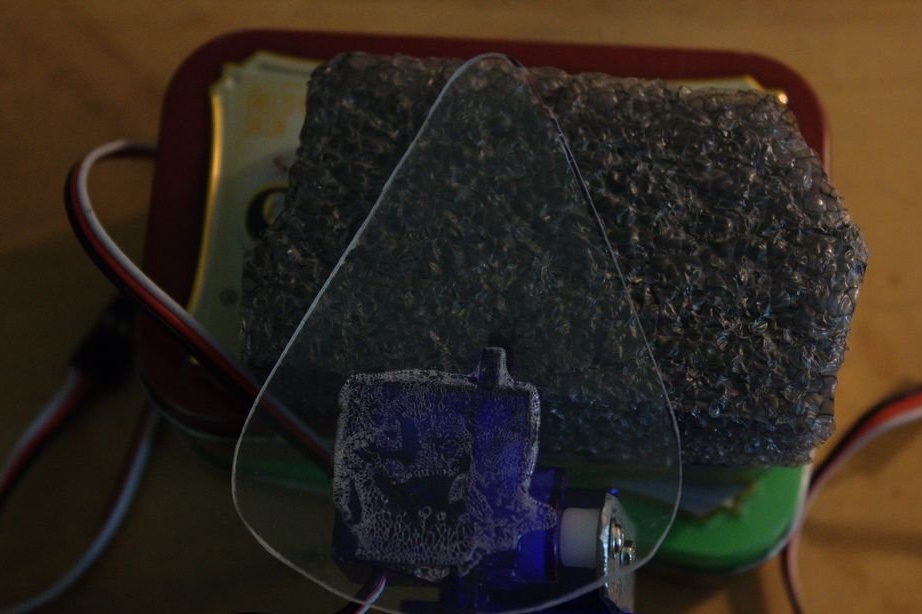
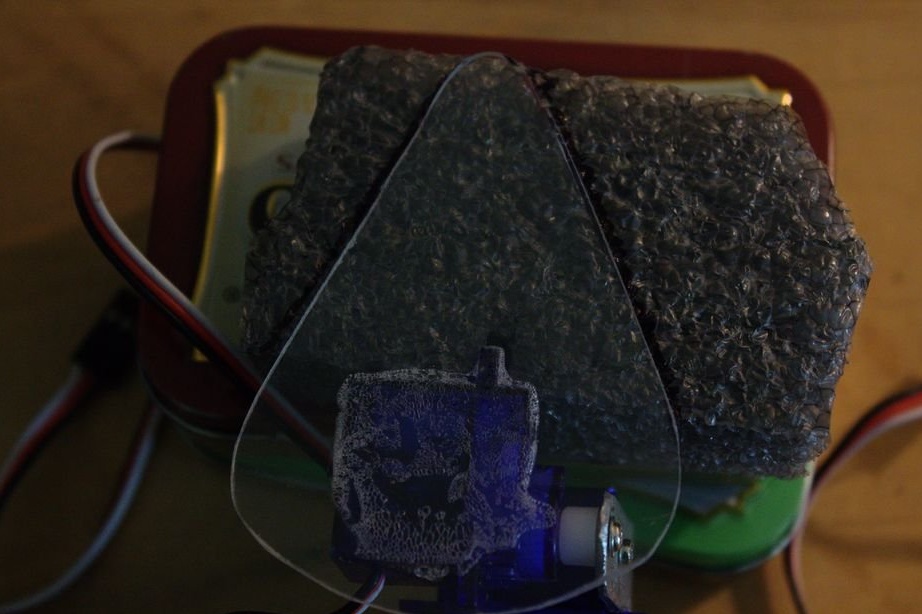
สำหรับปริมาตรผู้ควบคุมจะติดโฟมที่ฐานไว้ ขั้นตอนนี้อาจไม่ถูกนำมาใช้ แต่วิธีนี้ทำให้หูดูสวยขึ้น







ตอนนี้คุณต้องแน่ใจอีกครั้งว่าเซอร์โวในทุกระนาบเคลื่อนที่โดยไม่ต้องสัมผัสและคุณสามารถซ่อมฝาครอบได้ อาจารย์ติดกาวขนสัตว์โดยใช้กาวร้อนละลาย เมื่อติดกาวคุณต้องคำนวณจุดติดกาวให้ถูกต้อง ผ้าไม่ควรหย่อน แต่ก็ไม่ควรป้องกันเซอร์โวไม่ให้ขยับ ต้องตัดแต่งเนื้อเยื่อส่วนเกิน



ขั้นตอนที่แปด: การประกอบขั้นสุดท้าย
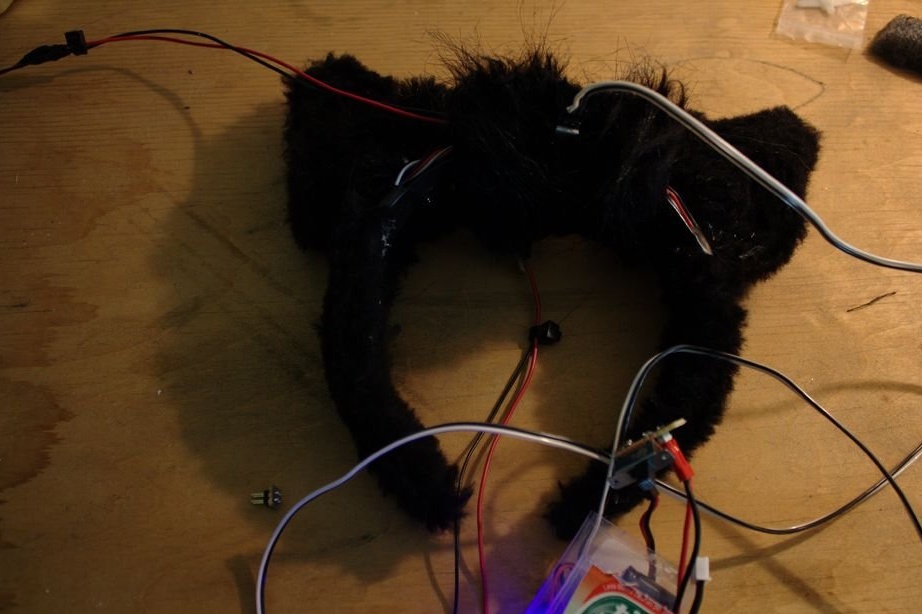
ตอนนี้ถึงเวลาที่จะทำให้ผลิตภัณฑ์เสร็จสมบูรณ์ เจ้านายสั่นขอบด้วยขนสัตว์ แบตเตอรี่และตัวควบคุมได้รับการบรรจุในภาชนะพลาสติกจากนั้นในกระเป๋าด้านหลังขอบ

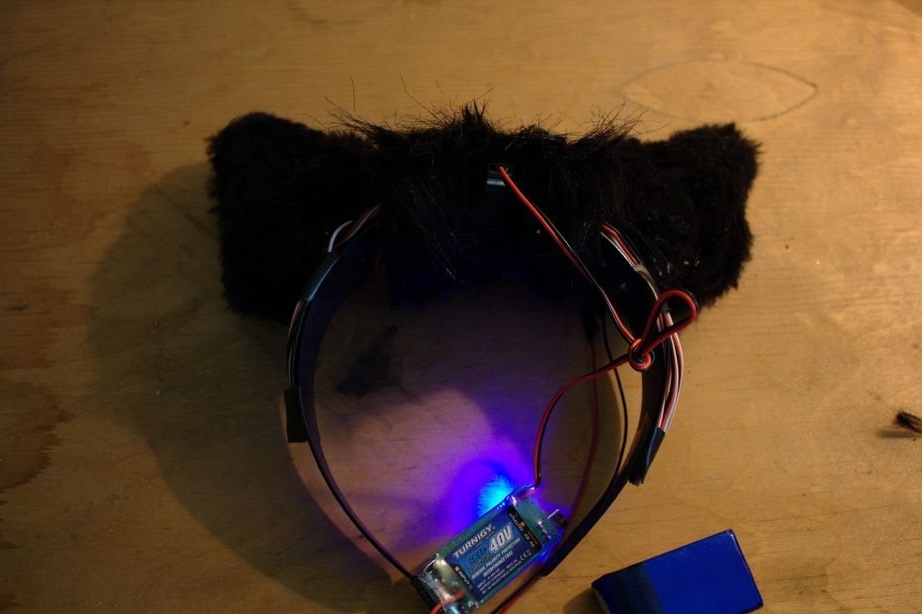




ทุกอย่างพร้อมแล้ว ด้านล่างคุณสามารถดูตัวอย่างเพิ่มเติมของอุปกรณ์ได้