

คนรักวันที่ดีของ Arduino! บนอินเทอร์เน็ตฉันเห็นหุ่นยนต์ที่ค่อนข้างน่าสนใจและน่าตื่นเต้น (หรืออุปกรณ์เรียกว่าสิ่งที่คุณต้องการ) ที่ "เล่น" เกม Stak โดยใช้หลักการปฏิบัติการเดียวกับที่คุณสามารถสร้างหุ่นยนต์ที่สามารถเล่นเกมได้เช่นรูปทรงเรขาคณิตเปียโนและอื่น ๆ โผล่หน้าจอด้วยลำดับที่แน่นอน สิ่งที่ฉันทำโปรดประเมินในแบบสำรวจด้านล่าง
หากใครสนใจนี่คือวิดีโอผลงานของหุ่นยนต์ตัวนี้:
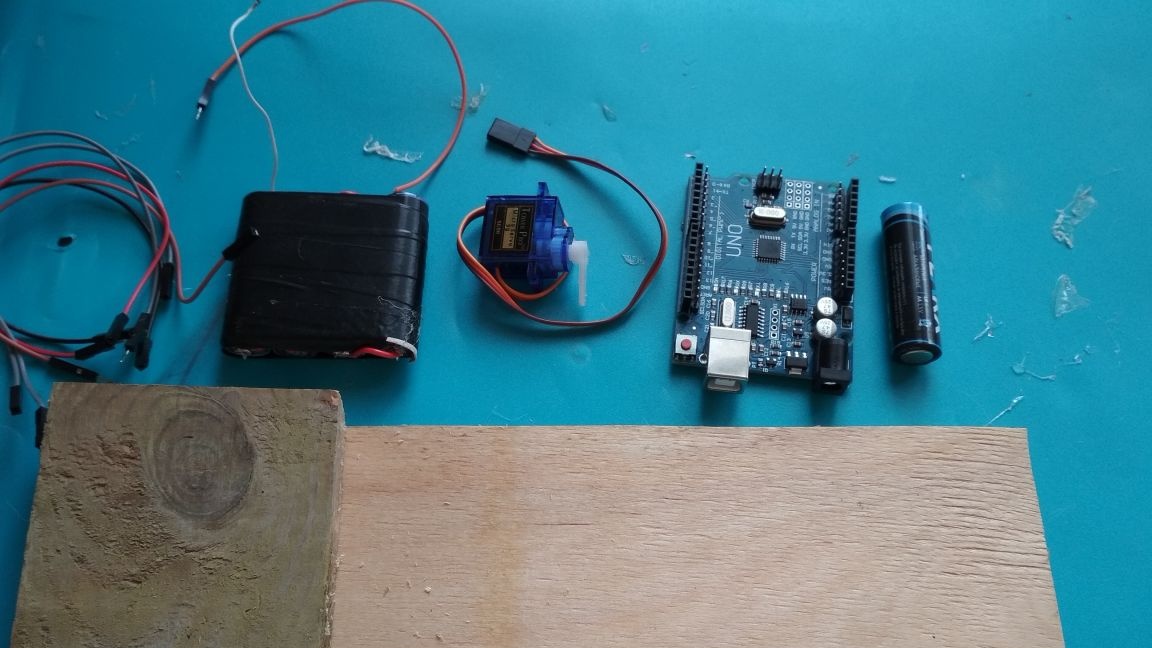
ดังนั้นสำหรับ "หุ่นยนต์" นี้เราต้องการ:
แต่งตัว Arduino Uno
- การเชื่อมต่อสายไฟเช่น "พ่อแม่" หรือ "พ่อพ่อ"
-servoprivod
- ชิ้นส่วนของไม้อัด
- แผ่นกระดานหนาประมาณ 1 ซม. สิ่งที่สำคัญคือหนากว่าไม้อัดสองเท่า
ไอศครีมแท่ง
-stilus
ฟอยด์ (หากไม่มีสไตลัส)
- แบตเตอรี่ (หากไม่มีสไตลัส)
- แหล่งจ่ายไฟสำหรับ 6-12 โวลต์ (ฉันใช้แบตเตอรี่ 4 นิ้วเชื่อมต่อเป็นอนุกรม)
จากเครื่องมือที่เราต้องการ:
-Scissors
กาวความร้อน
สิ่งแรกที่ต้องทำคือการตัดชิ้นใหญ่เป็นสองเท่าของโทรศัพท์ของคุณจากไม้อัดคุณสามารถใหญ่ขึ้นและคุณต้องตัดชิ้นส่วนขนาดของโทรศัพท์ของคุณจากกระดาน (ฉันทำขนาดแตกต่างกันเล็กน้อย แต่นี่ไม่สำคัญเลย) จากนั้นเราจะทำการกาวช่องว่างดังที่แสดงในรูปภาพ:

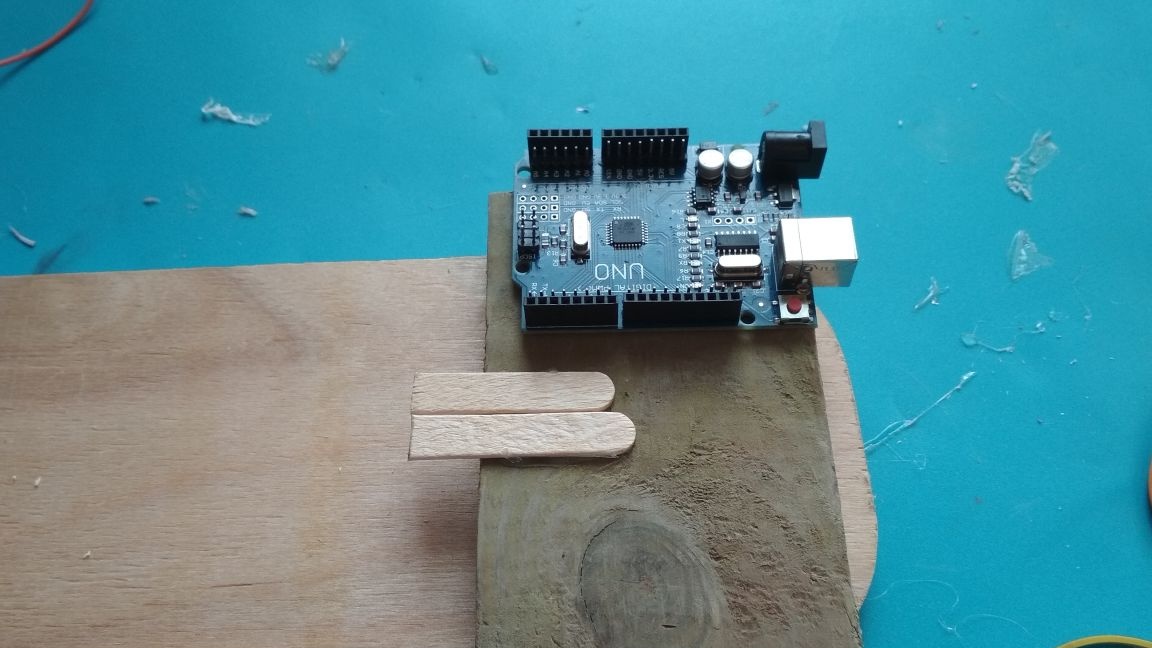
เอาแท่งไอศครีมแล้วผ่าครึ่ง:

ทากาวไว้ที่กึ่งกลางของบอร์ดจากด้านไม้อัดตามที่แสดงในรูปภาพ:

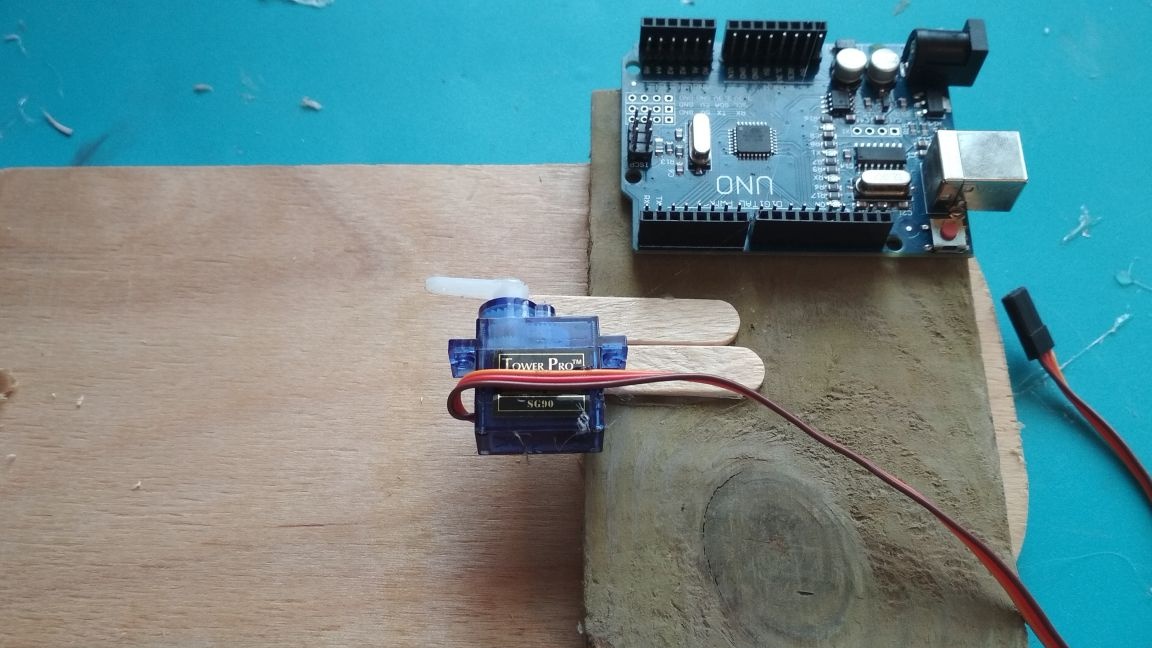
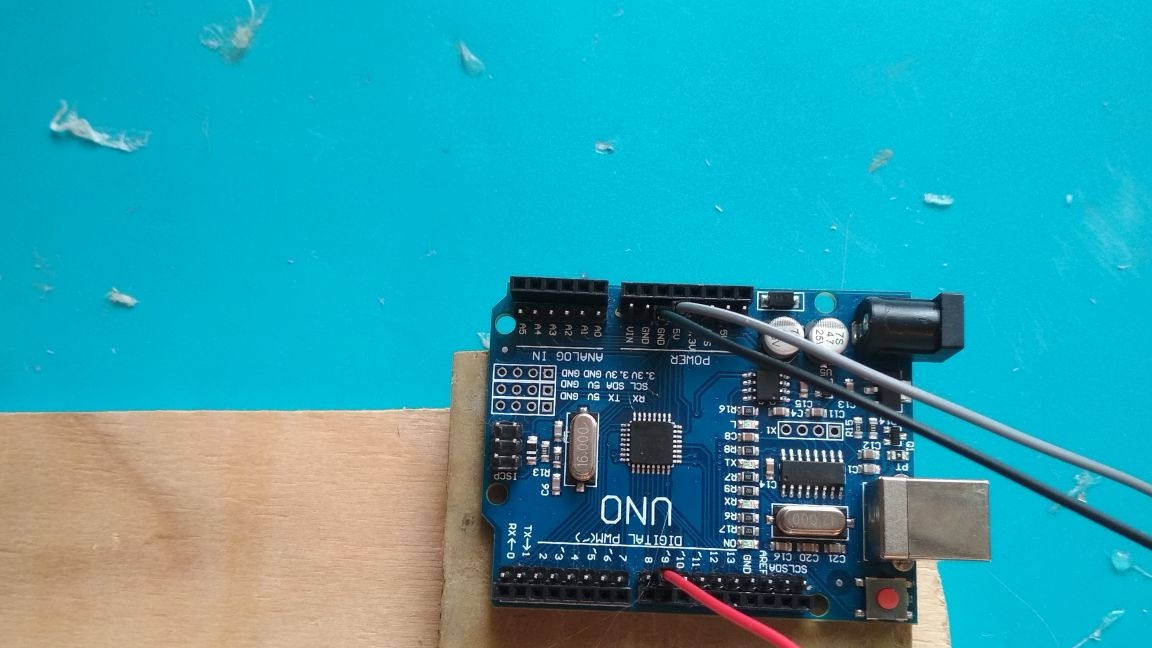
เราติดบอร์ด Ardino Uno จากขอบกระดาน:
เราใช้เซอร์โวมอเตอร์และติดตั้งสายไฟเพื่อไม่ให้สิ่งรบกวน:
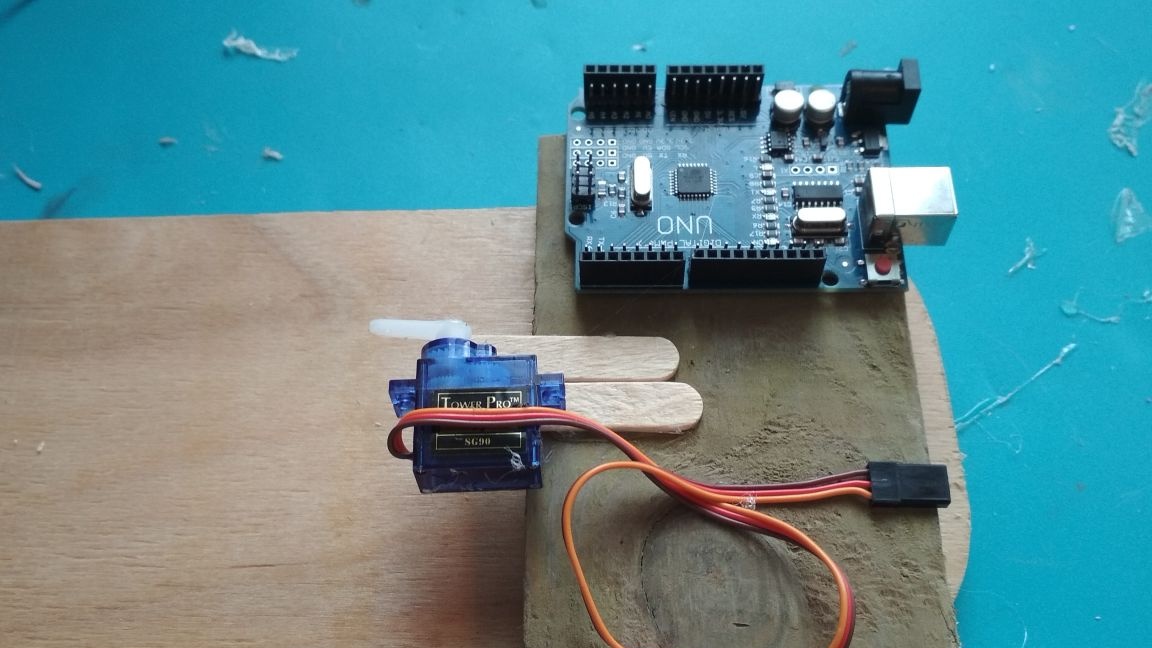
กาว servomotor ที่ส่วนท้ายของครึ่งหนึ่งของแท่งไอศครีม:
เราวางสายไฟและกาวเซอร์โวมอเตอร์เอาท์พุทไปที่ขอบของบอร์ด:
เพิ่มสาย 3 พ่อ - แม่โดยเฉพาะอย่างยิ่งในสีที่แตกต่างกันเพื่อไม่ให้สับสน
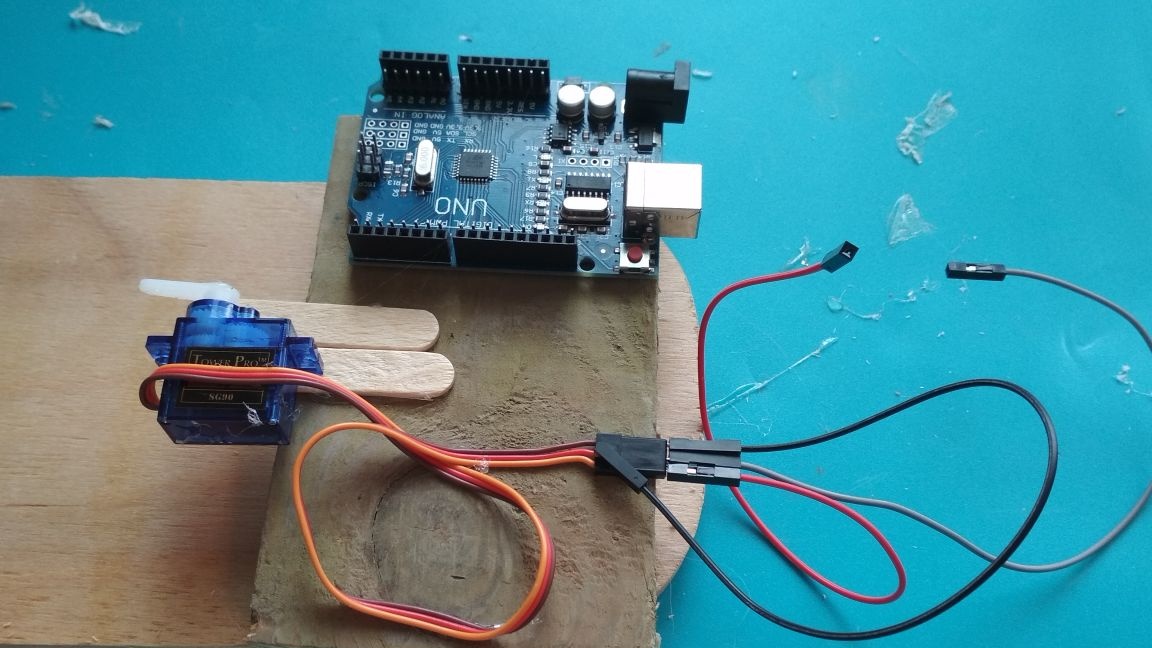
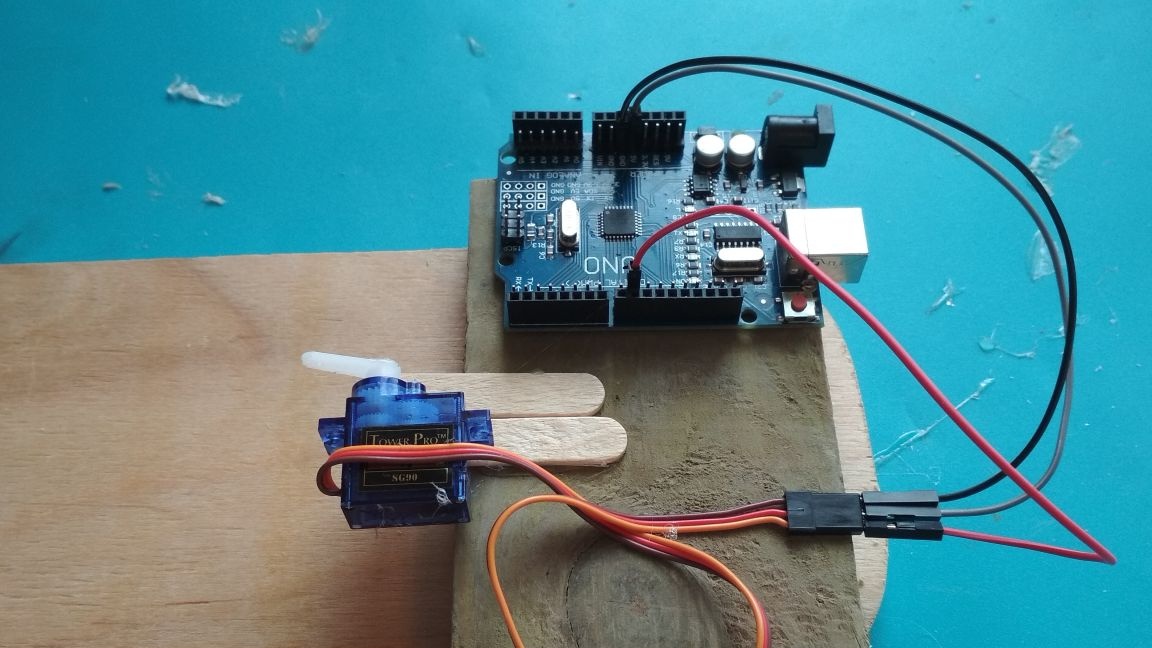
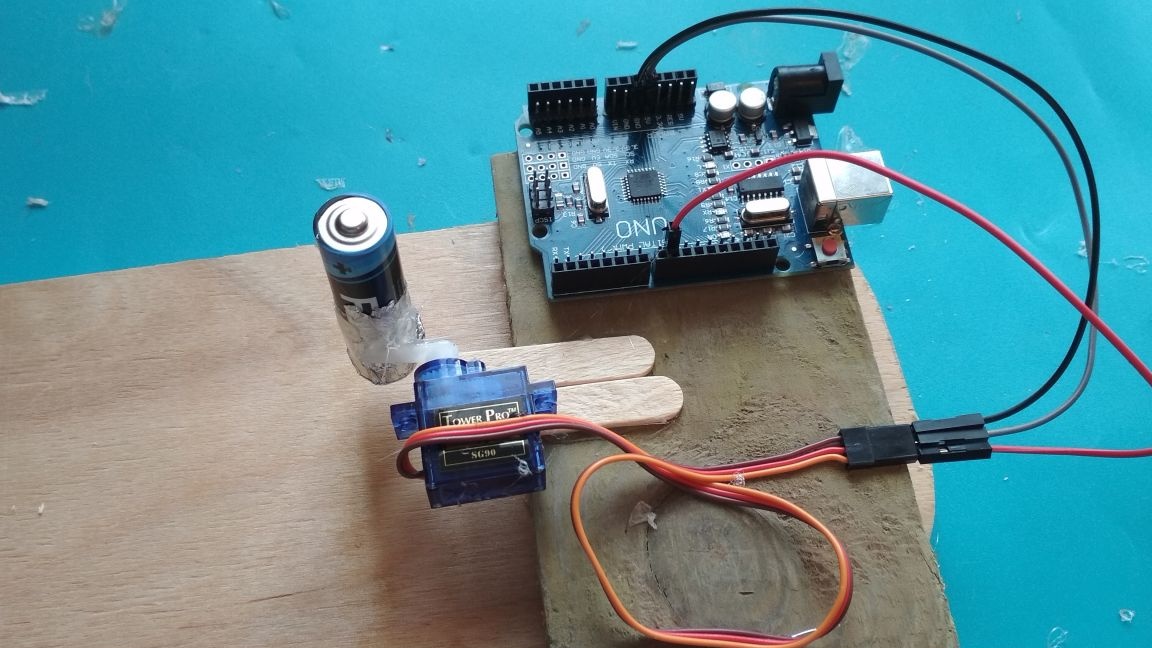
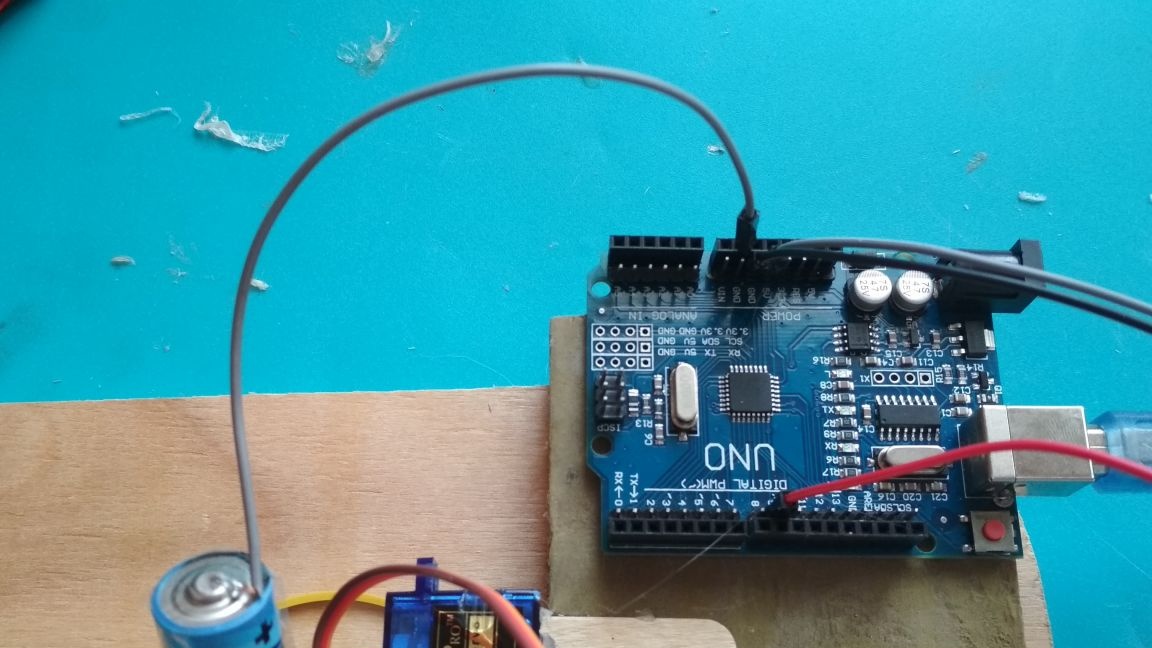
เราเชื่อมต่อไดรฟ์เซอร์โวเข้ากับบอร์ด Arduino ดังนี้:
ลวดสีน้ำตาลเพื่อ gnd
- ลวดสีแดงถึง 5v
- สายสีส้มถึง 9 "พินดิจิตอล"
หากคุณไม่มีสไตลัสเหมือนของฉันแล้วอย่าสิ้นหวังมันง่ายมากที่จะทำ
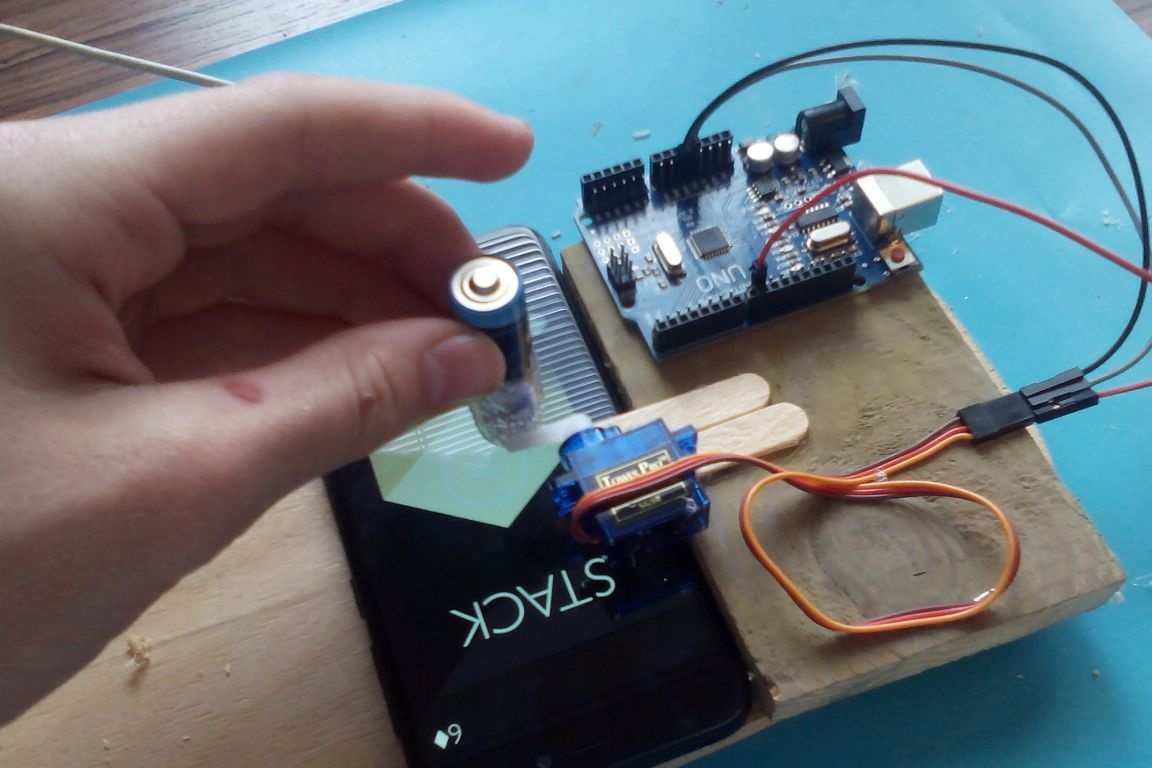
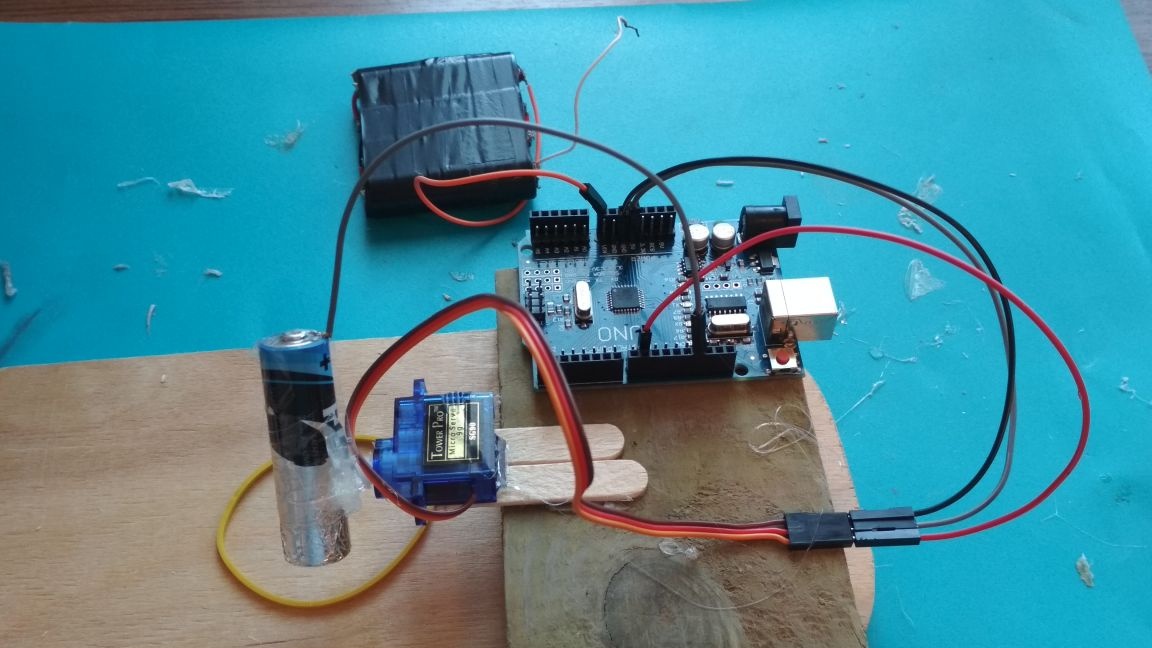
เราใช้แบตเตอรี่นิ้วปกติและด้านลบให้แน่นที่สุดห่อด้วยกระดาษฟอยล์แล้วอัดเทปไว้แน่นมาก:

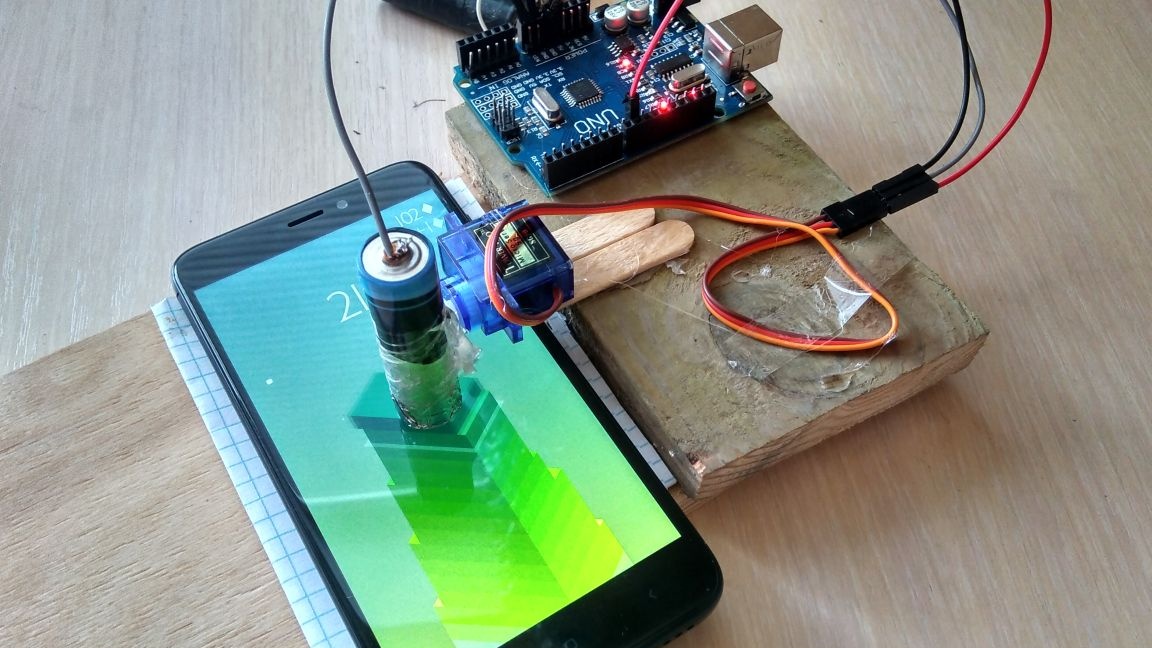
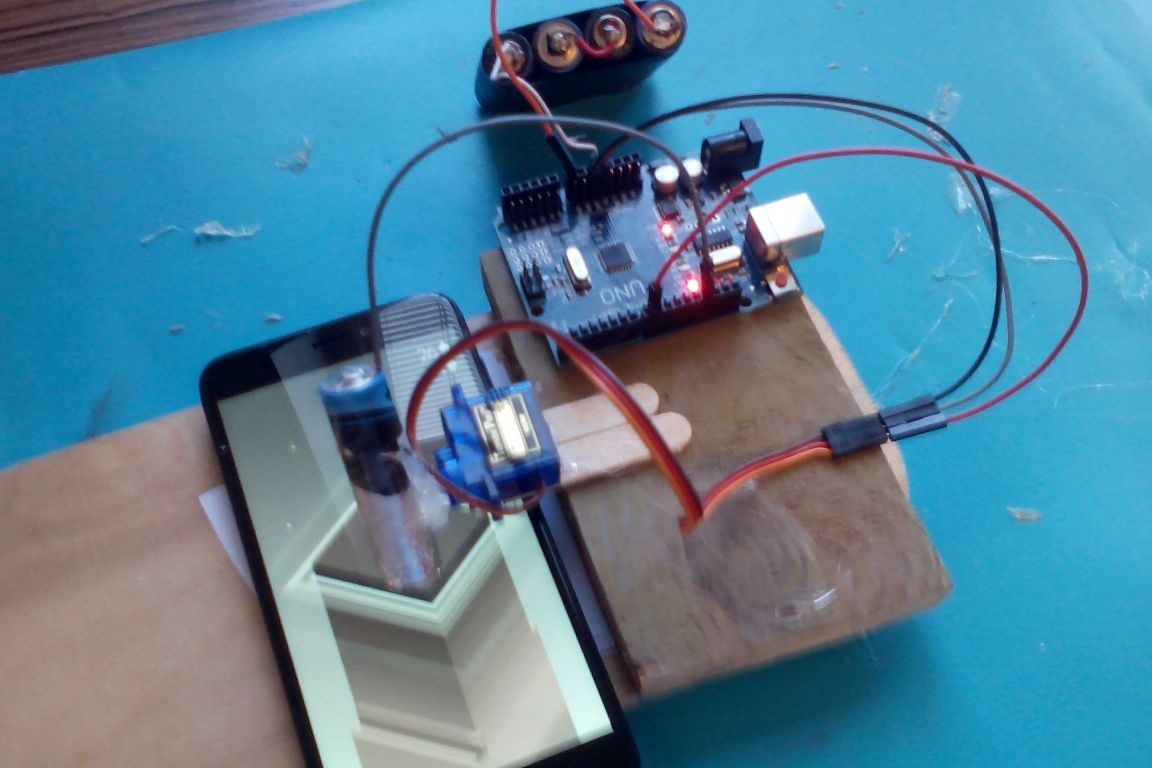
ตอนนี้คุณต้องวางโทรศัพท์ไว้บนไม้อัดใต้เซอร์โวมอเตอร์ใส่แบตเตอรี่ไว้ด้านบนและจดบันทึกไว้ที่ระดับใดเราจะติด "สไตลัส" ของเรา หลังจากที่เราสังเกตทุกอย่างแล้วให้ติดกาว“ สไตลัส” กับคันโยกของเซอร์โวมอเตอร์อย่างแน่นหนาที่มุม 90 องศา (มุมเดียวกันควรเป็นเมื่อใช้“ สไตลัส” กับโทรศัพท์เมื่อทำการวัด) ทุกอย่างควรทำงานตามที่แสดงในภาพ:

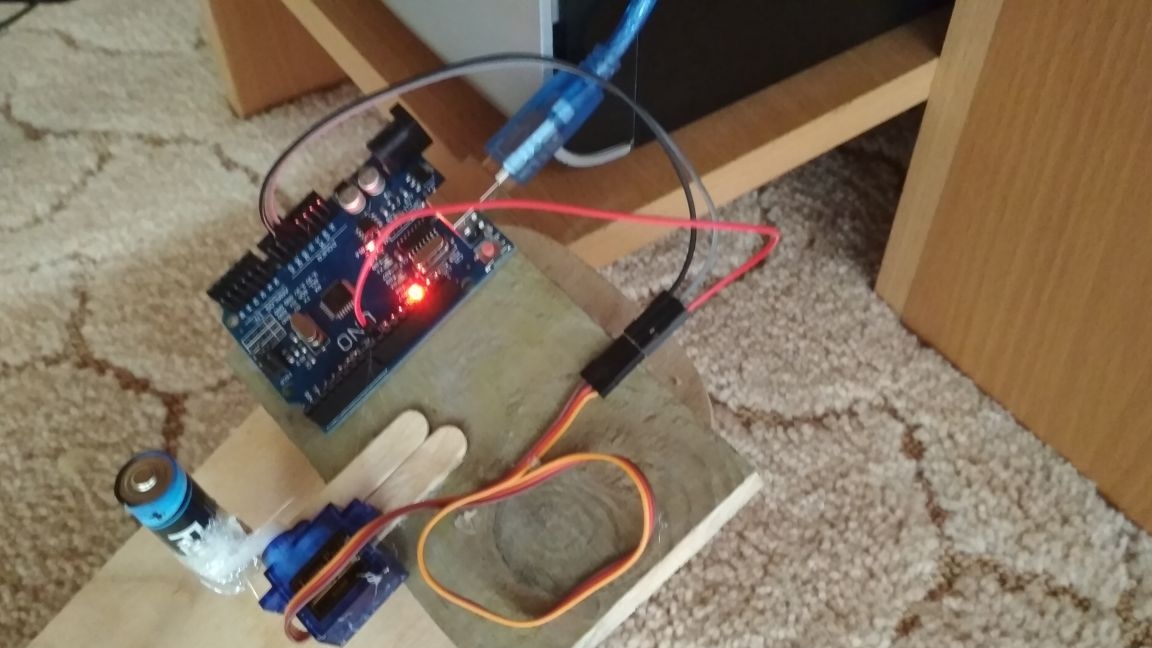
ตอนนี้เราเชื่อมต่อ "หุ่นยนต์" ของเราเข้ากับคอมพิวเตอร์ผ่านพอร์ตที่กำหนดค่าไว้ใน Arduino IDE เรียกใช้ Arduino IDE ที่มีชื่อก่อนหน้านี้แล้วคัดลอกร่างด้านล่างจากนั้นคลิกปุ่ม "ดาวน์โหลด" หากทุกอย่างทำอย่างถูกต้องร่างจะโหลดโดยไม่มีข้อผิดพลาดและหลังจากนั้นสองสามวินาทีเซอร์โวมอเตอร์จะเริ่มทำงาน หากคุณมีความแตกต่างอย่างมีนัยสำคัญในขนาดของสไตลัสและเซอร์โวมอเตอร์ทำให้ภาพร่างนี้เป็นของคุณเองมันค่อนข้างง่าย
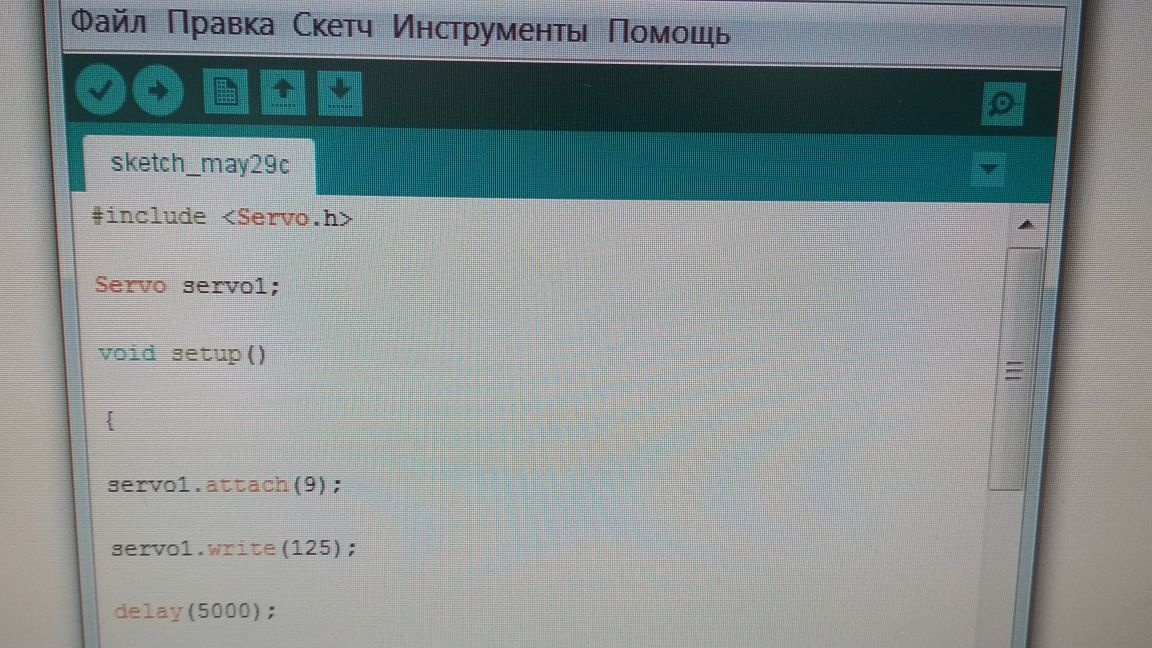
นี่คือภาพร่าง:
#include
เซอร์โว servo1;
การตั้งค่าเป็นโมฆะ ()
{
servo1.attach (9);
servo1.write (125);
ล่าช้า (5,000);
servo1.write (90);
ล่าช้า (200);
servo1.write (125);
ล่าช้า (750);
}
เป็นโมฆะห่วง ()
{
servo1.write (90); // 1
ล่าช้า (200);
servo1.write (125);
ล่าช้า (600);
}ด้วยการใช้เทปกาวหรือเทปไฟฟ้าเราจะม้วนด้านที่ดึงออกของสายชนิด“ แม่สู่แม่” ด้วยเอาต์พุต“ แม่” ที่ตัดออกไปยังด้านบวกของ“ สไตลัส” ของเราและส่งสายนี้ไปยัง Gnd บน Arduino:
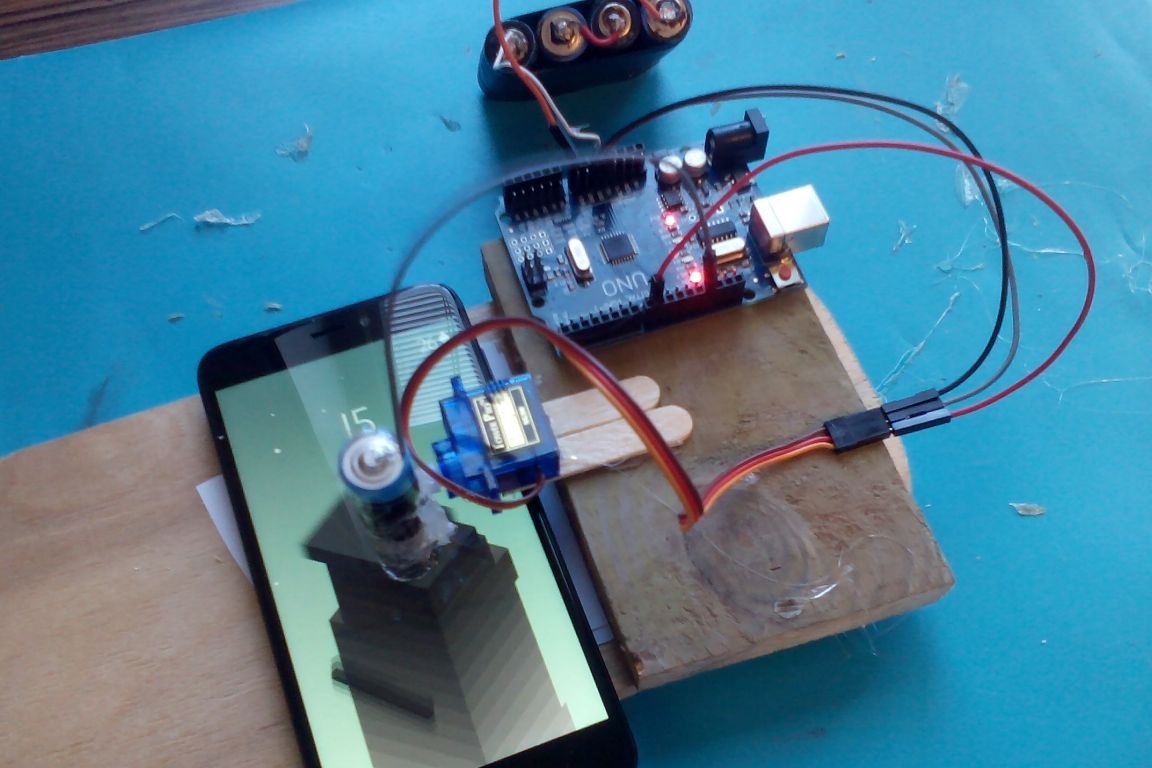
นั่นมัน! ง่าย ๆ ของเรา หุ่นยนต์ พร้อมและยังคงเป็นเพียงการทดสอบเท่านั้น! ในการทำเช่นนี้ให้วางโทรศัพท์ไว้ใต้สไตลัสเปิดแอปพลิเคชั่น Stak และวางโทรศัพท์เพื่อให้อยู่เหนือปุ่ม "เล่น" ซึ่งระบุด้วยลูกศรเราเชื่อมต่อพลังงานกับอาร์ดิโนโดยใช้อะแดปเตอร์พิเศษ ถึง gnd หลังจากเชื่อมต่อพลังงานแล้วหุ่นยนต์ของเราจะเริ่ม "เล่น" ทันที และถึงแม้จะเป็นเพราะความจริงที่ว่าฉันไม่ได้ใช้สไตลัสธรรมดา แต่เป็นแบตเตอรีหุ่นยนต์ของเรามักจะไม่ก้าวเข้ามาและพลาดมัน "เล่นมาเป็นเวลานานถ้าทุกอย่างทำได้อย่างถูกต้อง

ขอบคุณสำหรับความสนใจของคุณ!