วันนี้ฉันต้องการแบ่งปันสิ่งต่อไปของฉัน homebrew กิ่ง. มันขึ้นอยู่กับเลโก้และ Arduino. สำหรับการควบคุมเราจะใช้การควบคุมระยะไกลด้วยเครื่องส่งสัญญาณ 433 MHz ครั้งนี้ฉันต้องการแข่ง รถ. ขอเริ่มต้น:
- เลโก้เทคนิค 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- โมดูลการสื่อสารวิทยุ 433 MHz
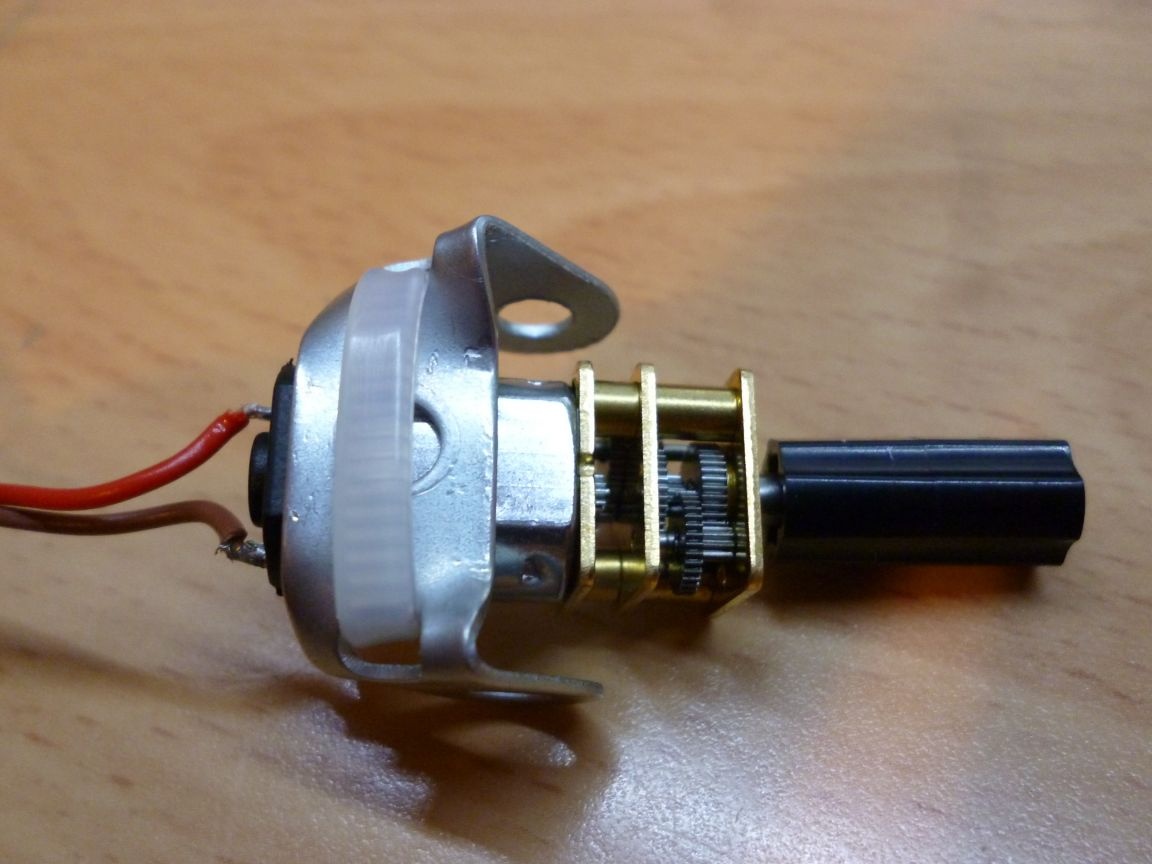
- มอเตอร์ลดความเร็ว 200 รอบต่อนาทีเส้นผ่านศูนย์กลางเพลา 3 มม
- LED 2 ดวง
- ตัวต้านทาน 2 ตัว 150 โอห์ม
- ตัวเก็บประจุ 10v 1000uF
- หวีเดี่ยว 2 แถว PLS-40
- 2 ขั้วต่อ PBS-20
- ตัวเหนี่ยวนำ 68mkGn
- แบตเตอรี่ NI-Mn 1.2v 1,000mA จำนวน 6 ก้อน
- เชื่อมต่อพ่อแม่สองขากับสาย
- Homutik
- สายไฟที่มีสีต่างกัน
- ประสาน
- ขัดสน
- หัวแร้ง
- สลักเกลียว 3x40 และถั่วและแหวนสำหรับพวกเขา
- สลักเกลียว 3x20
ขั้นตอนที่ 1 รวบรวมกรณี
จำเป็นต้องประกอบเครื่องของเราตามคำแนะนำเลโก้ 42022 ตัวเลือกที่สองพร้อมการปรับแต่งบางอย่าง เราดำเนินการทั้งหมดจากหน้า 3 ถึง 6 เราไม่ต้องการกลไกเกียร์ เครื่องยนต์เลโก้ไม่จำเป็นต้องประกอบ อย่างไรก็ตามคุณจะต้องติดตั้งเครื่องยนต์ในหน้า 14-19 ยกเว้นเกียร์และเพลา ต่อไปเรารวบรวมทุกอย่างจากหน้า 20 ถึง 74 ยกเว้นคันโยกหน้า 25
ขั้นตอนที่ 2 จัดกลไกร่างกาย
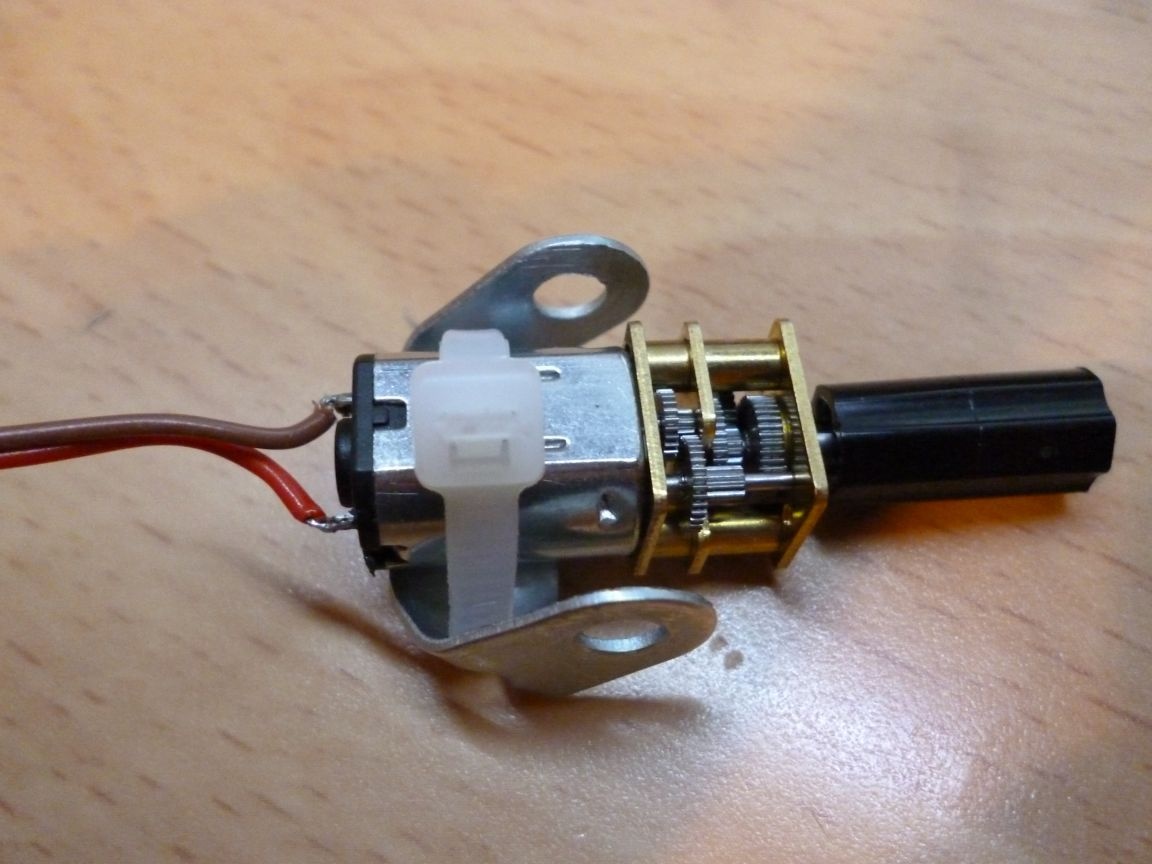
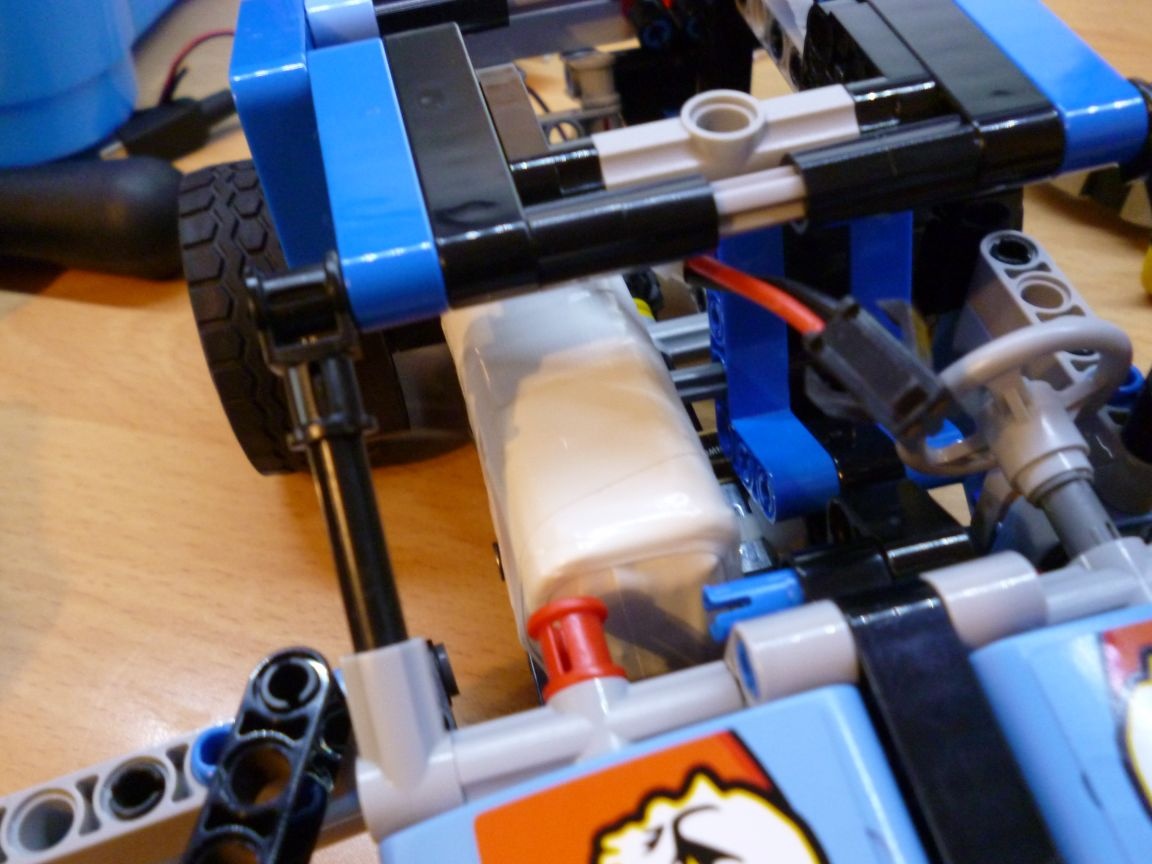
ในการเคลื่อนไหวของเรา รูปแบบ จะมีมอเตอร์เกียร์ด้วยความเร็ว 200 รอบต่อนาที สามารถใช้กับอัตราทดเกียร์ที่แตกต่างกัน แต่ในความคิดของฉันนี้เป็นตัวเลือกที่ดีที่สุด ที่ 100 รอบต่อนาที - ช้าเกินไป 300 รอบต่อนาที - มีพลังงานไม่เพียงพอและเครื่องยนต์ร้อนมาก ที่เพลาของมอเตอร์เกียร์ให้สวมปลอก“ Legovskaya” ที่เชื่อมต่อและป้องกันไม่ให้บิดกับไม้ขีดไฟ ในการซ่อมมอเตอร์ของเรากับแบบจำลองนั้นจำเป็นต้องโค้งงอชิ้นส่วนจากตัวสร้างโลหะด้วยตัวอักษร“ P” และติดมอเตอร์เกียร์เข้ากับแผ่นด้วยแคลมป์ ผลลัพธ์ควรเป็นดังนี้:
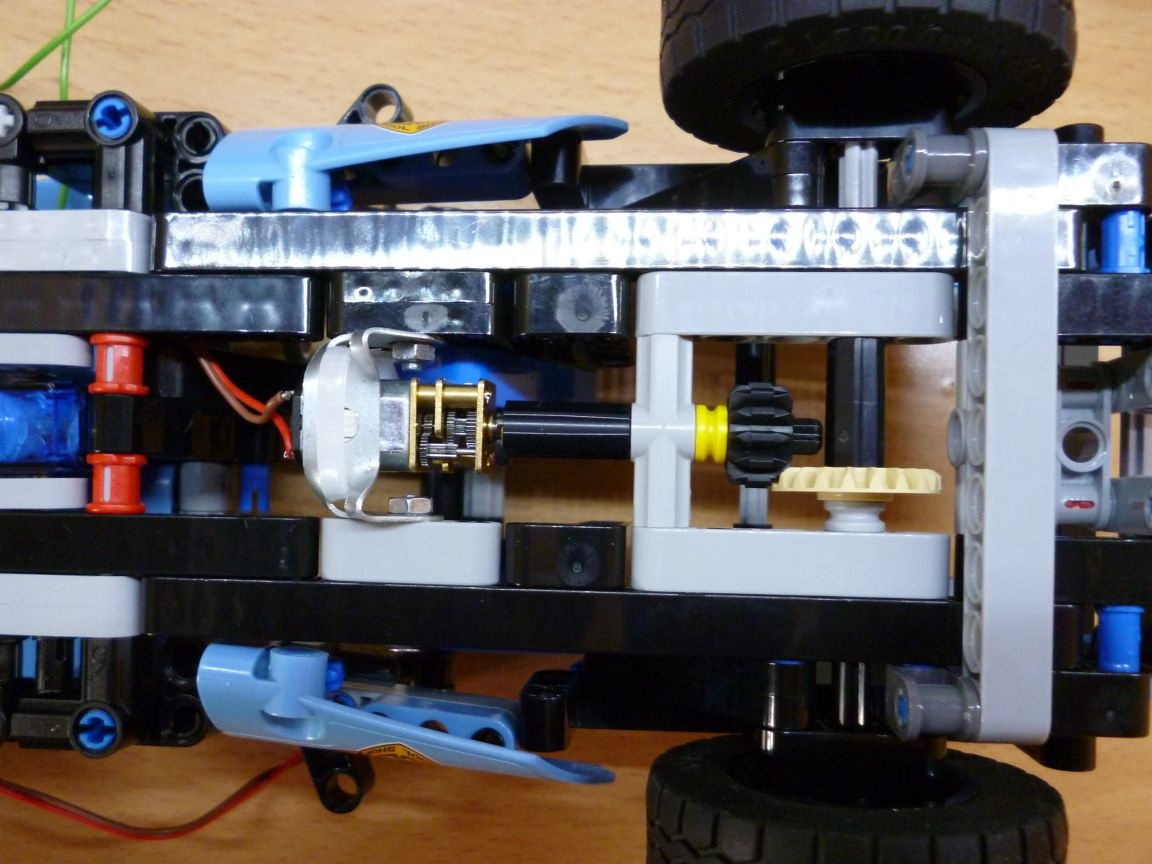
ด้วยความช่วยเหลือของสลักเกลียวขนาด 3x20 ทำให้เรายึดมอเตอร์เข้ากับรุ่น อย่ากระชับมากเกินไป! มิฉะนั้นคุณอาจสร้างความเสียหายให้กับตัวสร้างเลโก้ได้ ในโมเดลดูเหมือนว่า:
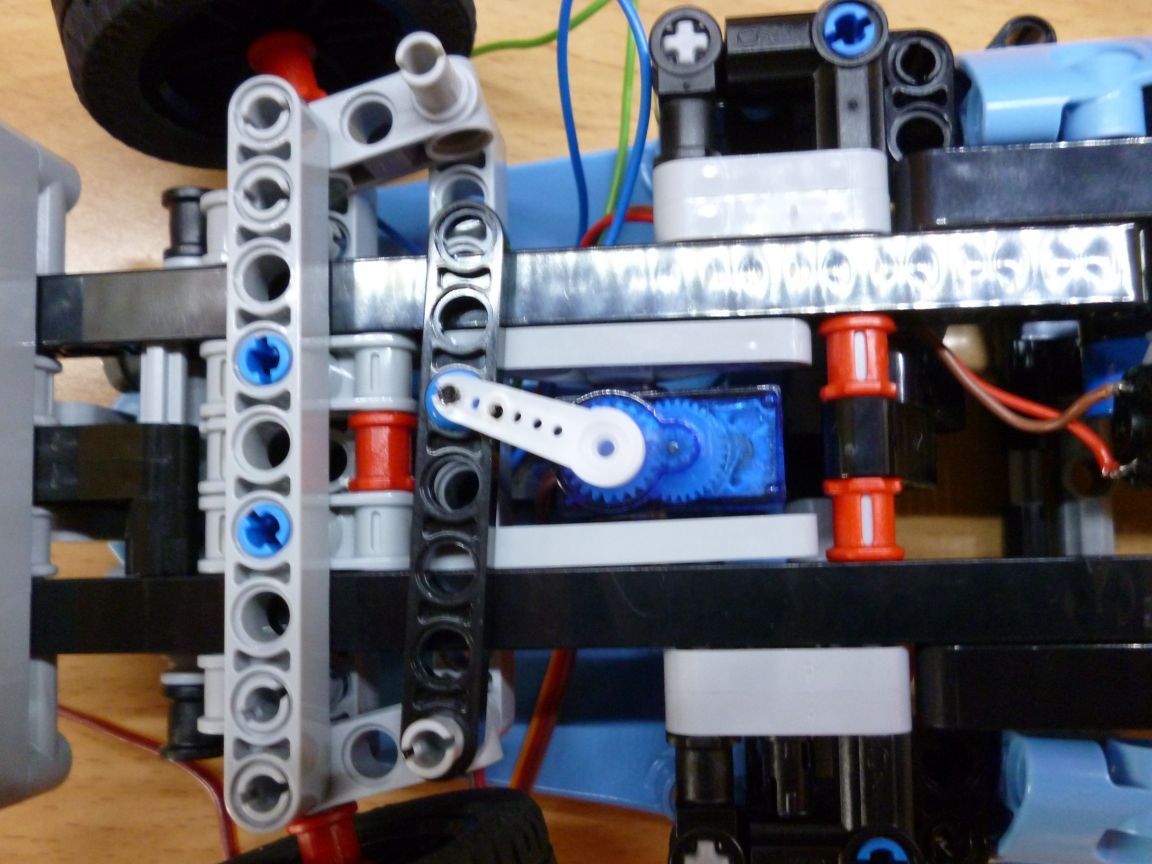
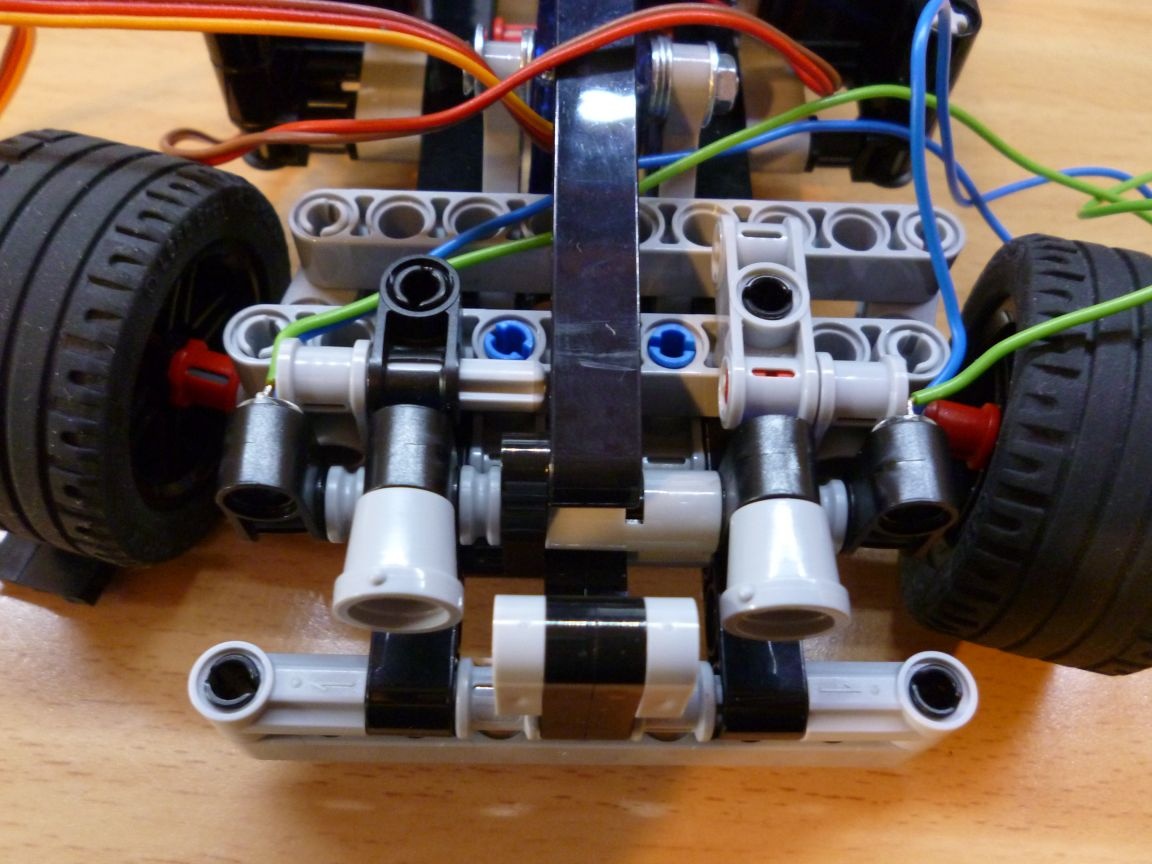
หากต้องการเลี้ยวให้ใช้เซอร์โว SG-90 ที่ปรับเปลี่ยนเล็กน้อย ต้องเจาะกล่องอย่างระมัดระวังเพื่อไม่ให้สัมผัสชิ้นส่วนภายในรูทะลุที่มีเส้นผ่านศูนย์กลาง 3.2 มม. หรือตัดด้วยมีดสเตชันเนอรี

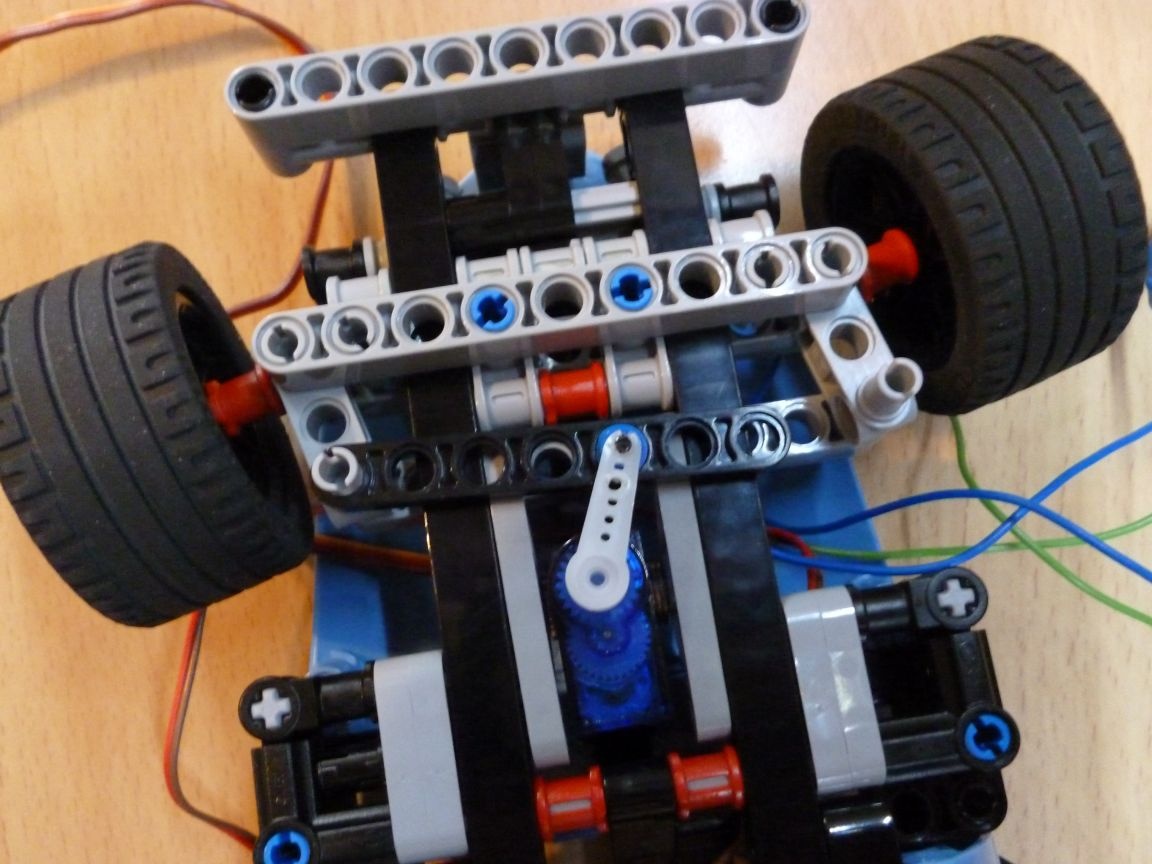
เราใส่สลักเกลียวลงในหลุมที่ทำและบนขอบที่เราใส่แผ่นสามเหลี่ยมและแก้ไขด้วยถั่ว เราใส่คันโยกบนเพลา servo และยึดชิ้นส่วนกับคันโยกเลโก้ บนเครื่องพิมพ์ดีดดูเหมือนว่า:
ขั้นตอนที่ 3 คือช่างไฟฟ้า
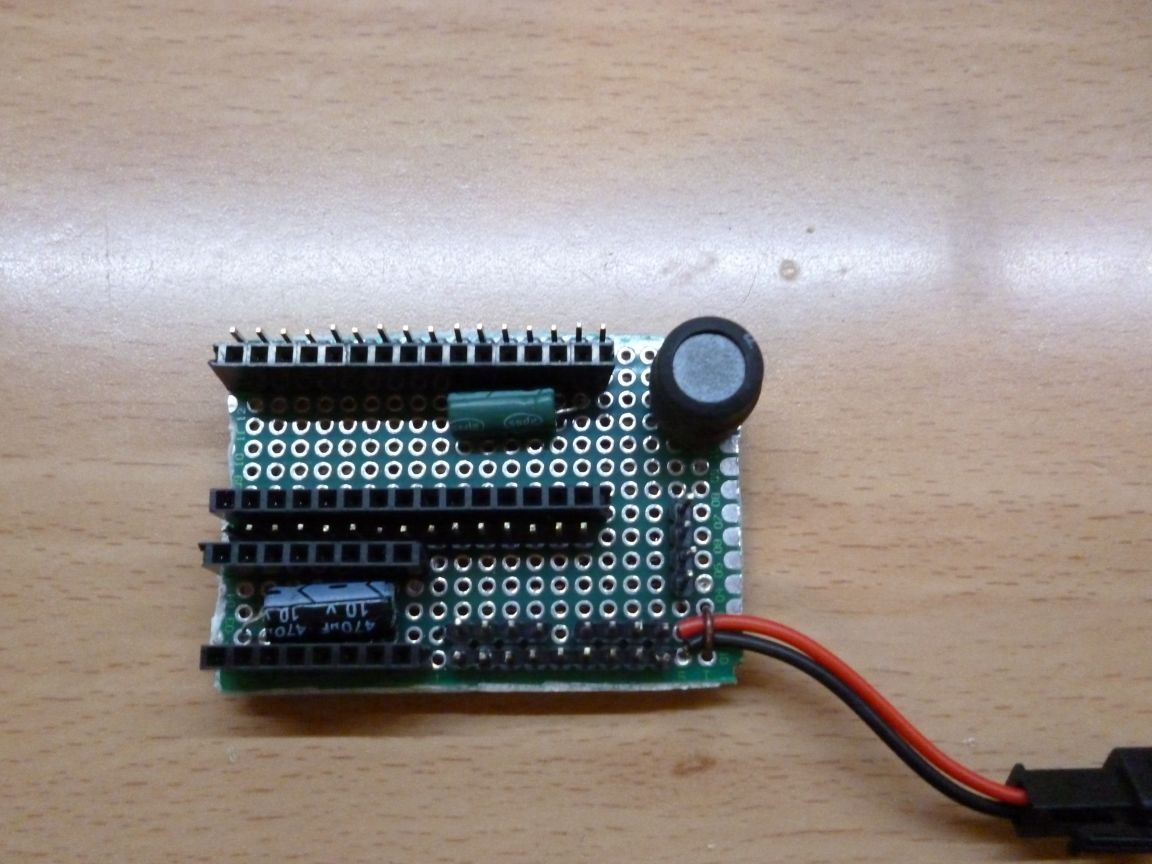
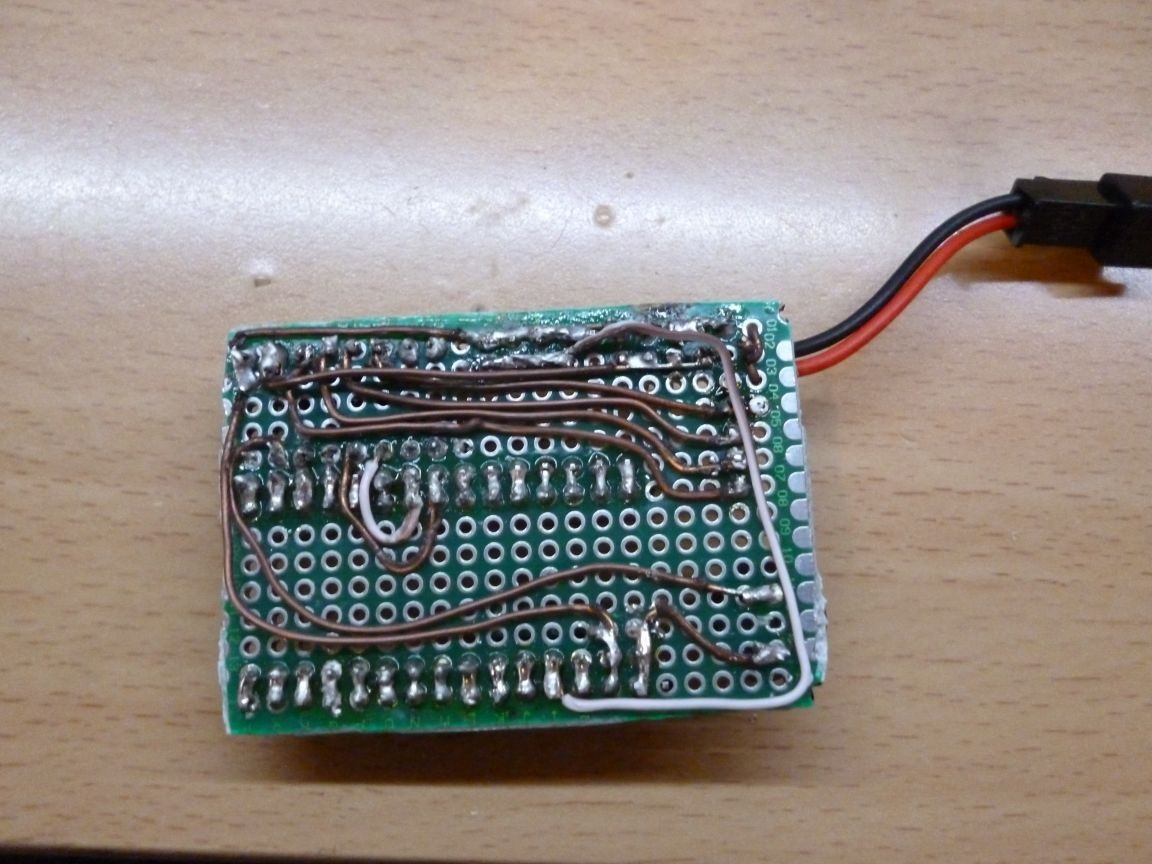
หัวแร้งในมือและไป ไฟฟ้าทั้งหมดสามารถประกอบได้ง่าย ๆ เพียงแค่เชื่อมต่อสายไฟยึด แต่สิ่งนี้ไม่สะดวกเนื่องจากต้องใช้พื้นที่มาก นอกจากนี้มีความน่าจะเป็นสูงในการติดต่อที่มีคุณภาพต่ำ ดังนั้นจึงเป็นการดีกว่าที่จะประสานทุกอย่างบนแผงวงจรตามรูปแบบต่อไปนี้:
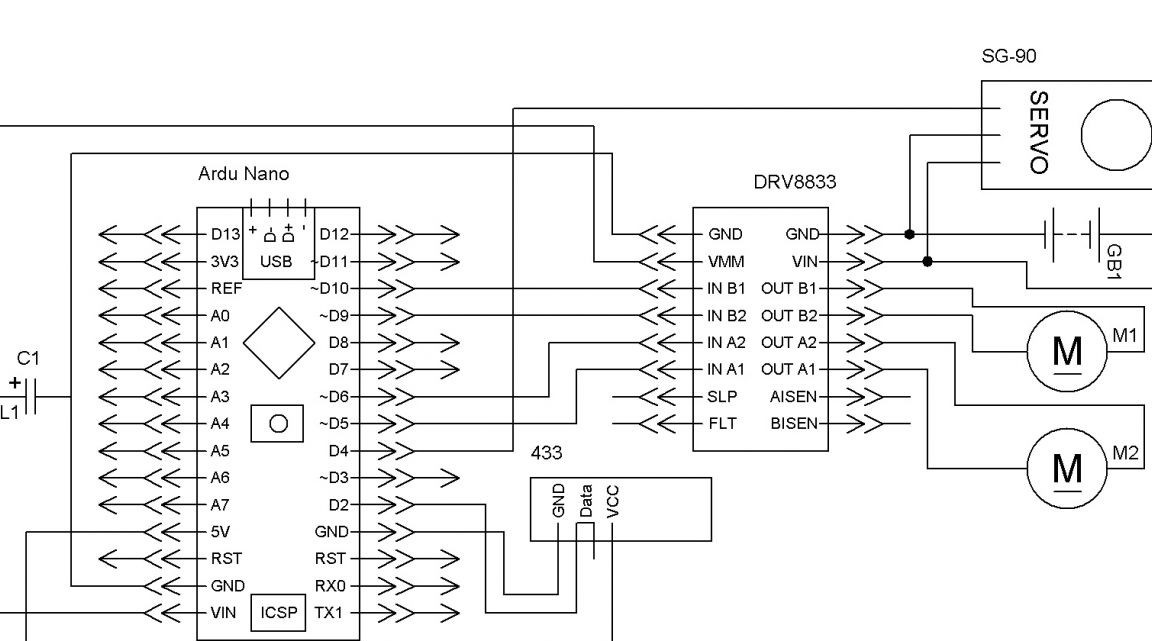
ฉันจะนำมาซึ่งความชัดเจนเล็กน้อย: คุณสามารถใช้ตัวเก็บประจุพลังงานต่ำใดก็ได้คุณยังสามารถหาตัวเหนี่ยวนำได้ทุกชนิดนี่เป็นสิ่งจำเป็นเพื่อทำให้แรงดันไฟฟ้าของไมโครคอนโทรลเลอร์มีเสถียรภาพ เสาอากาศจะต้องบัดกรีให้ผู้รับ ฉันได้รับต่อไปนี้:
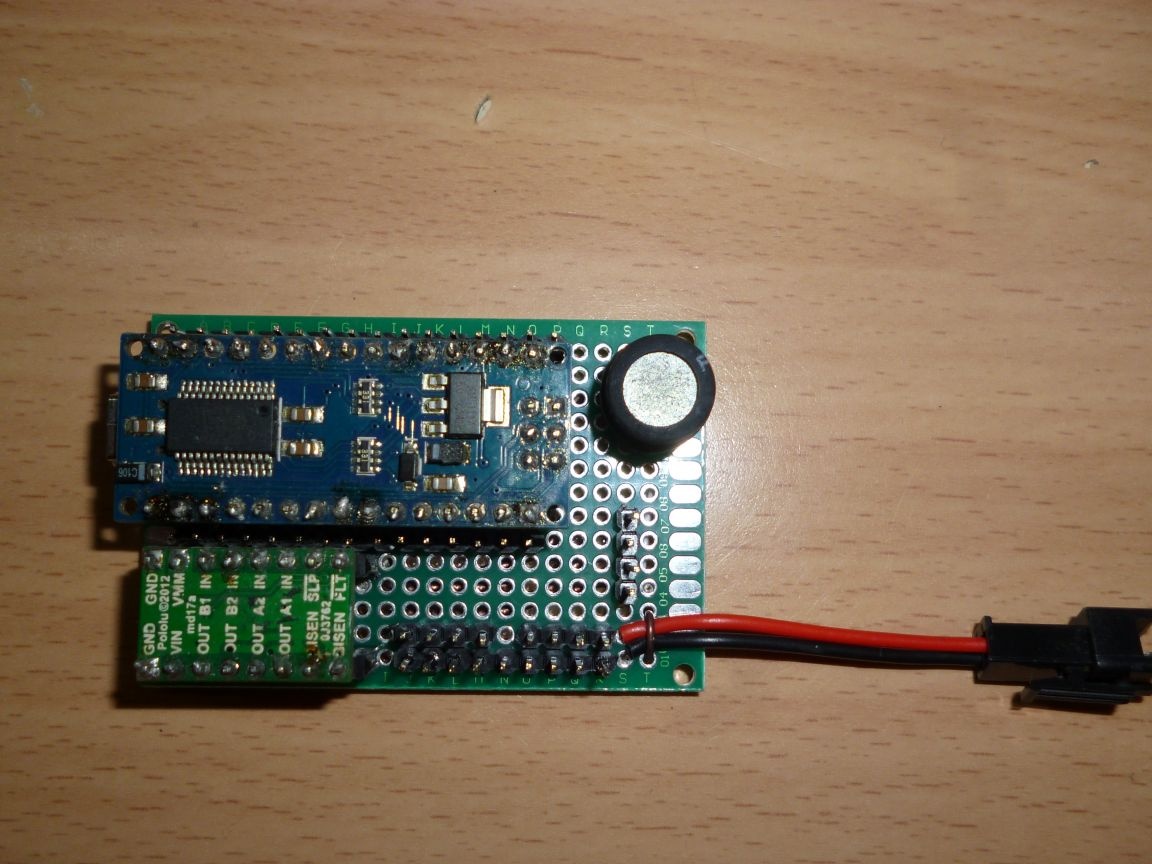
เราวาง Arduino Nano และ DRV 8833 ไว้ในที่ของมัน:
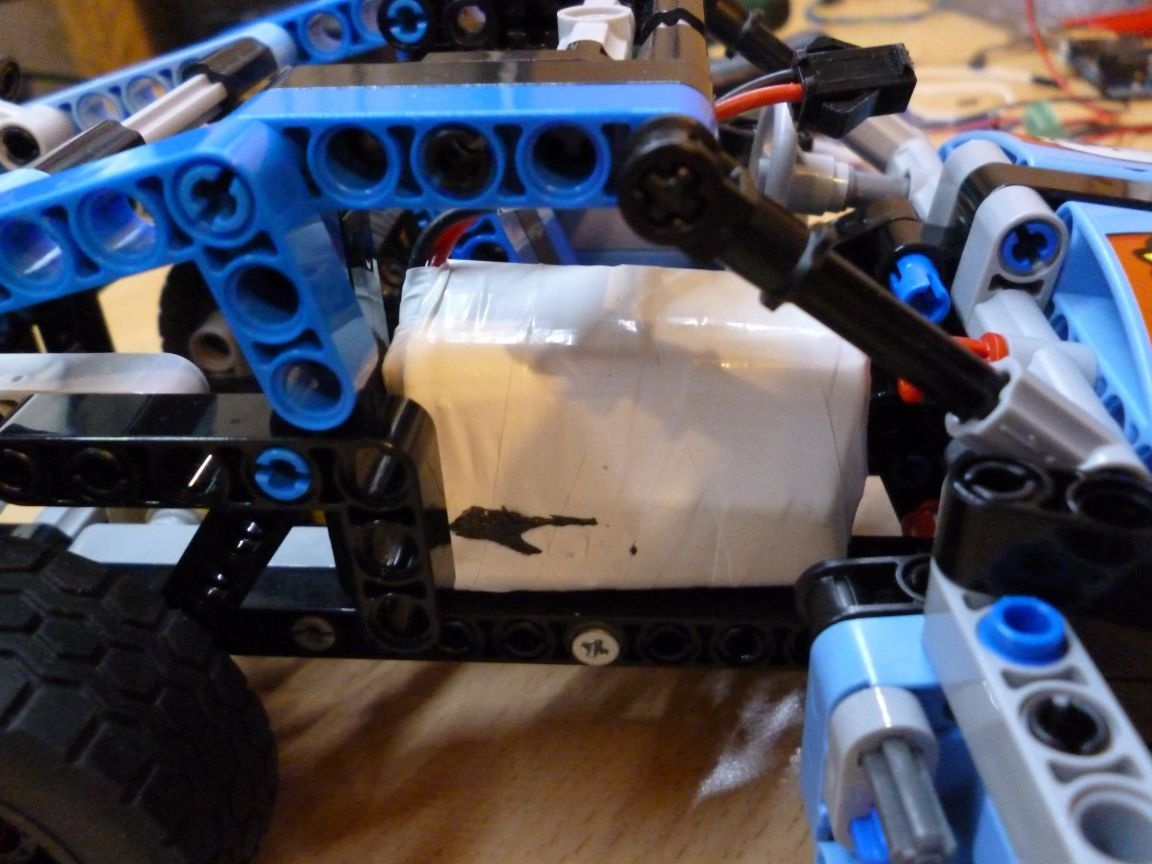
เพื่อพลังงานเราจะใช้แบตเตอรี่ Ni-Mn 1.2v 1000mA จำนวน 6 ก้อนบัดกรีเป็นชุดและพันด้วยเทปพันสายไฟ ทากาวไว้ที่เบาะผู้โดยสารด้านเทปกาวสองด้าน

เราเชื่อมต่อทุกอย่างตามแบบแผนและติดตั้งที่ด้านหลังของเครื่อง คุณยังสามารถเพิ่มไฟ LED สองสามดวง วางไว้ในไฟหน้าและเชื่อมต่อกับขา 14 (A2)
ขั้นตอนที่ 4 เฟิร์มแวร์
ในการเขียนเฟิร์มแวร์ฉันใช้ Arduino IDE เวอร์ชันปัจจุบัน ณ เวลาที่เขียนคือ 1.8.1 สะดวกในการใช้โปรโตคอลการสื่อสารโดยใช้โมดูล 433 MHz โดยใช้ไลบรารี rc-switch-2.52 คุณต้องดาวน์โหลดและเพิ่มไปยังโฟลเดอร์ "libraries" ของ Arduino IDE
เราเชื่อมต่อ Arduino และแฟลชด้วยเฟิร์มแวร์ต่อไปนี้:
เพื่อทดสอบประสิทธิภาพของรุ่นของเราเราจำเป็นต้องมีบอร์ด Arduino ตัวที่สอง มีความจำเป็นต้องเชื่อมต่อเครื่องส่งสัญญาณวิทยุ 433 MHz เข้ากับบอร์ดที่สอง เครื่องส่งสัญญาณเชื่อมต่อดังนี้:
VCC (ตัวส่งสัญญาณ) ถึง 5+ (Arduino)
GND ถึง GND,
DATA ถึง D10
เขียนแบบร่าง SendDemo ที่แก้ไขที่นั่น มันอยู่ในตัวอย่างในไลบรารีที่เราติดตั้งและทำหน้าที่ส่งคำสั่ง ก่อนที่จะกระพริบร่างคุณต้องเปลี่ยนเล็กน้อยนั่นคือเปลี่ยนคำสั่งที่ส่ง ขึ้นอยู่กับสิ่งที่คุณต้องตรวจสอบเขียนคำสั่งต่อไปนี้เพื่อส่งบรรทัด:
“ 1” - การเคลื่อนที่ไปข้างหน้า (เขียนคำสั่งโดยไม่มีเครื่องหมายอัญประกาศ!)
"2" - การเคลื่อนไหวย้อนหลัง
“ 15” - หยุดเต็ม
"3" - หมุนพวงมาลัยไปทางซ้าย
"4" - หมุนพวงมาลัยไปทางขวา
"5" - ตั้งพวงมาลัยตรงกลาง
"10" - เปิดไฟหน้า
"11" - ปิดไฟหน้า
การสร้างรีโมตคอนโทรลด้วยเครื่องส่งสัญญาณวิทยุ 433 MHz เป็นหัวข้อสำหรับบทความแยกต่างหาก ฉันจะเขียนคำแนะนำสำหรับการผลิตรีโมตคอนโทรลอย่างแน่นอน
ฉันอยากจะบอกว่าตัวเลือกนี้เหมาะสำหรับรถ Lego ทุกรุ่น มันก็เพียงพอที่จะเชื่อมต่อกลไกทั้งหมดและหาสถานที่สำหรับคณะกรรมการ และถ้าคุณใส่แฟนตาซีคุณก็สามารถสร้างโมเดลได้ทุกแบบ