

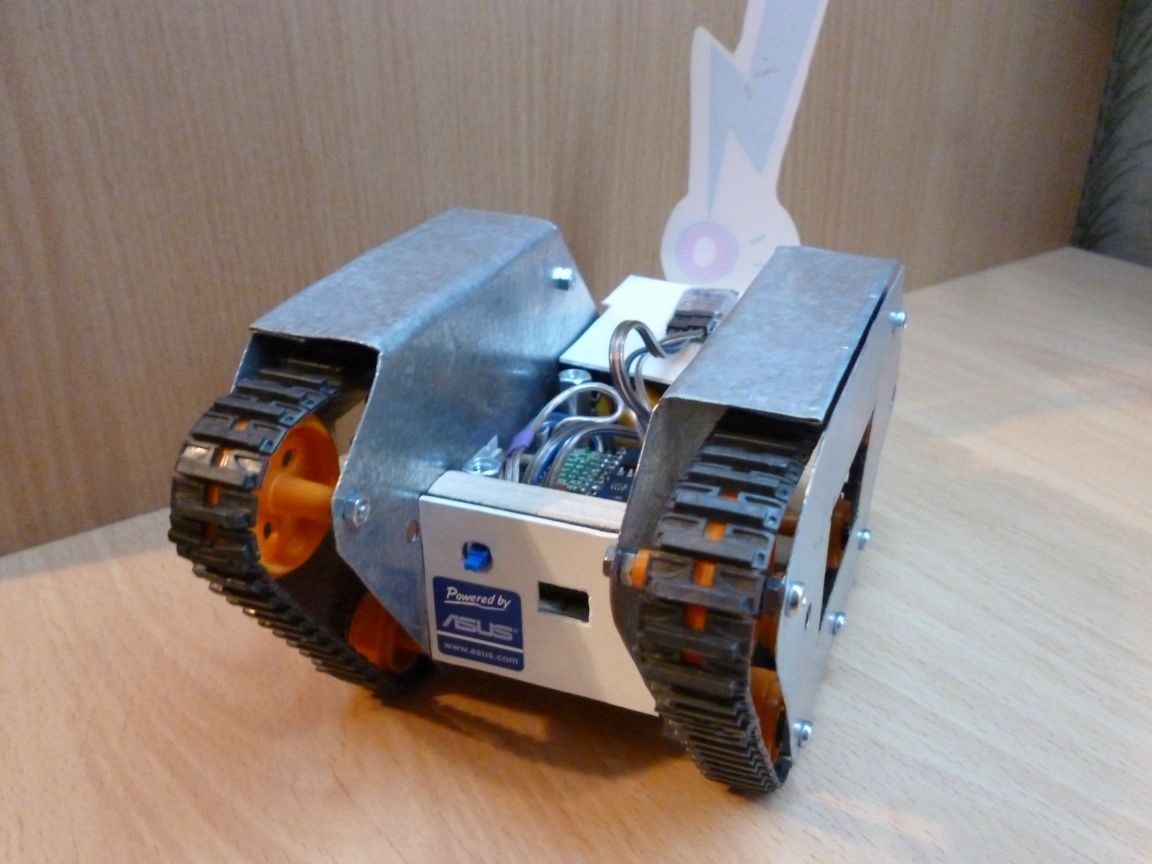
เมื่อเร็ว ๆ นี้ฉันอธิบายการผลิตแชสซีที่ติดตามสากล วันนี้ฉันต้องการพูดคุยเพิ่มเติมเกี่ยวกับการเชื่อมต่อโมดูลบลูทู ธ กับแชสซีของเรา และที่นี่เขาเอง:

ในการดำเนินการนี้ ทำที่บ้าน จำเป็นต้องทำแชสซี รายละเอียดการผลิตซึ่งมีคำอธิบาย ที่นี่
นอกจากนี้คุณต้องมีสิ่งต่อไปนี้:
- โมดูลบลูทู ธ HC-XX (หรือโคลน)
- โทรศัพท์ Android
- สายเชื่อมต่อ "แม่ - แม่"
ขั้นตอนที่ 1 การเลือกโมดูล
มีโมดูลบลูทู ธ จำนวนมาก และทุกคนมีลักษณะแตกต่างกัน กล่าวโดยสรุปรายการจะเป็นดังนี้:
- HC-03, HC-04 (HC-04-M, HC-04-S) บนชิป BC417143 - สำหรับงานอุตสาหกรรม
- HC-05, HC-06 (HC-06-M, HC-06-S) บนชิป BC417143 - สำหรับใช้ในเชิงพาณิชย์;
- HC-05-D, HC-06-D (พร้อม debug board สำหรับการประเมินผลและการทดสอบ);
- HC-07 - โมดูลที่มีชิป CSR 41C6 ออกแบบมาเพื่อแทนที่ HC-06 (เข้ากันได้กับมัน)
- HC-08 - โมดูลที่ใช้พลังงานต่ำมากและโปรโตคอลบลูทู ธ 4.0
- HC-09 เป็นโมดูลใหม่ล่าสุดที่ออกแบบมาเพื่อแทนที่ HC-06 และ HC-07
ลักษณะโดยย่อของโมดูล:
- ชิปบลูทู ธ - BC417143 ผลิตโดย
- โปรโตคอลการสื่อสาร - ข้อมูลจำเพาะบลูทู ธ v2.0 + EDR;
- รัศมีของการกระทำ - สูงสุด 10 เมตร (ระดับพลังงาน 2)
- เข้ากันได้กับอะแดปเตอร์บลูทู ธ ทั้งหมดที่รองรับ SPP;
- จำนวนหน่วยความจำแฟลช (สำหรับจัดเก็บเฟิร์มแวร์และการตั้งค่า) - 8 Mbit;
- ความถี่ของสัญญาณวิทยุ - 2.40 .. 2.48 GHz;
- ส่วนต่อประสานโฮสต์ - USB 1.1 / 2.0 หรือ UART;
- การใช้พลังงาน - กระแสระหว่างการสื่อสารคือ 30-40 mA ค่าเฉลี่ยปัจจุบันประมาณ 25 mA หลังจากสร้างการสื่อสารแล้วปริมาณการใช้ปัจจุบันคือ 8 mA ไม่มีโหมดสลีป
โมดูลบลูทู ธ ราคาไม่แพงที่สุดในวันนี้คือ HC-05 และ HC-06 พวกเขามีมากมายในร้านค้าออนไลน์ของจีน ความแตกต่างระหว่างพวกเขาคือครั้งแรกที่สามารถทำงานได้ทั้งในโหมดต้นแบบ (ทาส) และในโหมดทาส (หลัก) ประการที่สองเป็นอุปกรณ์ทาสอย่างหมดจด กล่าวอีกนัยหนึ่ง HC-06 ไม่สามารถตรวจจับอุปกรณ์ที่จับคู่และสร้างการเชื่อมต่อกับมันมันสามารถเชื่อฟังหลัก
โดยปกติโมดูลจะขายเป็นสองบอร์ดบัดกรีด้วยกัน อันที่เล็กกว่านั้นเป็นโมดูลของโรงงาน อิเล็กทรอนิกส์ อุปกรณ์ ใหญ่ - เขียงหั่นขนมพิเศษสำหรับ DIY ดูเหมือนบอร์ดเล็ก ๆ ที่มีชิป BC417:

ดังนั้นโมดูล DIY HC-05 และ HC-06 เอง:

โดยหลักการแล้วคุณสามารถใช้โมดูลใดก็ได้ที่คุณต้องการ โมดูลที่ไม่มีเขียงหั่นขนมมีค่าใช้จ่ายน้อยกว่า แต่คุณจะต้องดูแลแหล่งจ่ายไฟ 3.3 V สำหรับโมดูลและทำการทรมานตัวเองด้วยการบัดกรีสายไฟเข้ากับโมดูลเนื่องจากเทอร์มินัลนั้นอยู่ใกล้มาก ฉันเลือกที่ดีที่สุดในความคิดของฉันในราคา / อัตราส่วนการทำงาน HC-06

การเชื่อมต่อขั้นตอนที่ 2
เราเชื่อมต่อดังนี้:
Arduino บลูทู ธ นาโน
D7 - RX
D8 - TX
5V - VCC
GND - GND
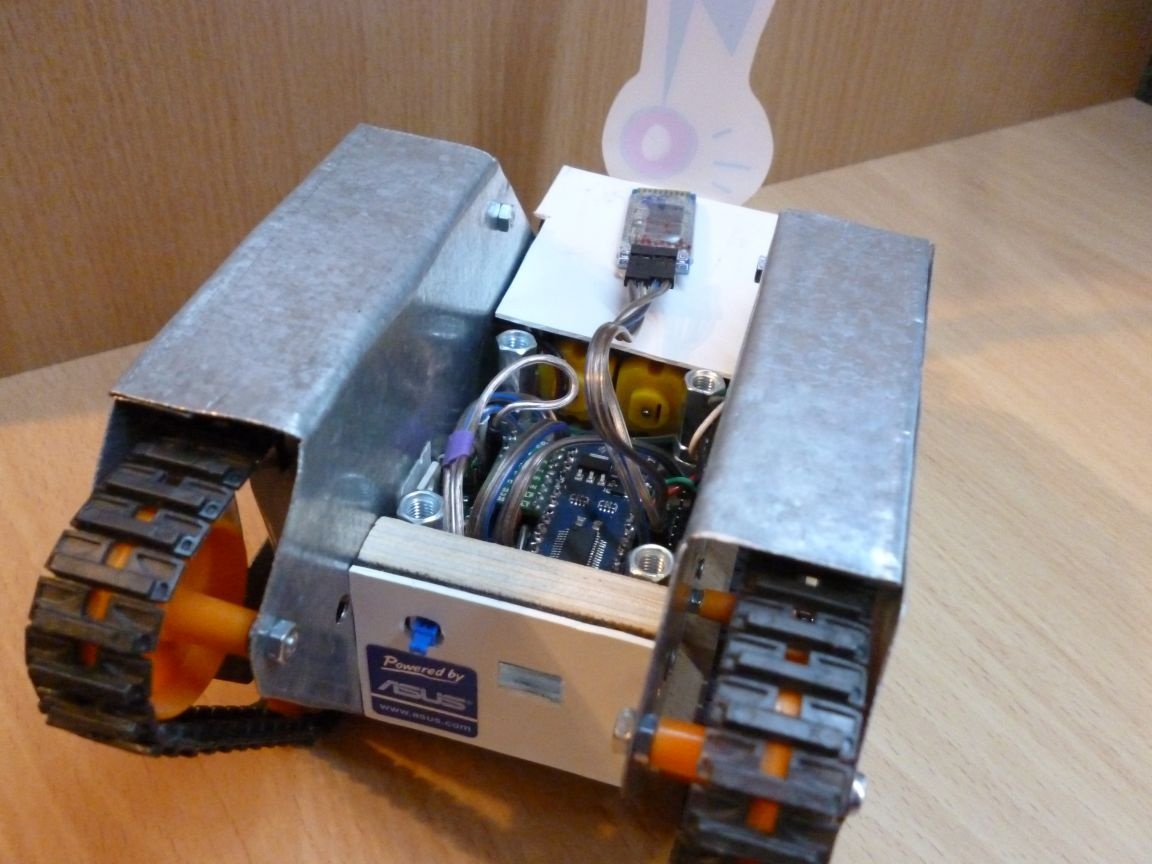
เพื่อความสะดวกให้ติดกาวโมดูลบนเทปสองหน้าในแชสซี:
การตั้งค่าโมดูลขั้นตอนที่ 3
เพื่อการทำงานที่เหมาะสมจะต้องกำหนดค่าโมดูล เราจะกำหนดค่าคำสั่ง AT ที่ป้อนลงในหน้าต่างเทอร์มินัล ฉันยกตัวอย่างการตั้งค่าโมดูล HC-06 หากคุณมีคนอื่นการตั้งค่าอาจแตกต่างกัน เพื่อให้โมดูลของเราได้รับคำสั่งก่อนอื่นเราแฟลช Arduino ด้วยเฟิร์มแวร์ต่อไปนี้:
ในกรณีนี้ Arduino ทำหน้าที่เป็นสะพานเชื่อมระหว่างคอมพิวเตอร์และโมดูล ในเฟิร์มแวร์ฉันใช้ห้องสมุด SoftwareSerial ที่ความเร็วสูงมันทำงานได้ไม่เสถียร หากคุณต้องการความเร็วสูงคุณสามารถเชื่อมต่อโมดูลโดยตรงกับรายชื่อ Arduino RX และ TX และเขียนเฟิร์มแวร์ใหม่ แต่ในกรณีของฉันเราจะทำงานกับโมดูลที่ความเร็ว 9600 ในความคิดของฉันก็เพียงพอแล้ว ดังนั้นหลังจากเฟิร์มแวร์เปิดเทอร์มินัลแล้วป้อน:
“ AT” (โดยไม่ใส่เครื่องหมายอัญประกาศ) คำตอบ“ OK” ควรมา (หมายความว่าทุกอย่างเชื่อมต่ออย่างถูกต้องและโมดูลทำงานอยู่)
“ AT + BAUD96000” (ไม่มีเครื่องหมายคำพูด) คำตอบ“ OK9600” ควรมา
หากคุณมีคำตอบที่ถูกต้องไปที่ขั้นตอนต่อไป
ขั้นตอนที่ 4 เฟิร์มแวร์
ในการเขียนเฟิร์มแวร์และเฟิร์มแวร์นั้นฉันใช้ Arduino IDE รุ่นปัจจุบันของวันนี้คือ 1.8 ฉันโพสต์ตัวเลือกเฟิร์มแวร์หลายตัว:
BT_RobotControl - สำหรับการควบคุมหุ่นยนต์บน Android
BT_WASD - สำหรับควบคุมจากคอมพิวเตอร์ส่งคำสั่งผ่านเทอร์มินัล
ขั้นตอนที่ 5 ตั้งค่าโทรศัพท์ของคุณ
บนโทรศัพท์ Android คุณต้องติดตั้งโปรแกรมเพื่อควบคุมหุ่นยนต์ผ่านบลูทู ธ มีจำนวนมาก คุณสามารถป้อน“ Bluetooth Arduino” ใน Google play และเลือกตามใจชอบ ฉันชอบ BT Controller ดาวน์โหลดและติดตั้งบนโทรศัพท์หรือแท็บเล็ต Android ถัดไปผ่านการตั้งค่า Android คุณจะต้องสร้างการเชื่อมต่อกับโมดูลของเรา รหัสผ่านสำหรับการเชื่อมต่อคือ "1234" หรือ "0000"
ขั้นตอนที่ 6 การตั้งค่าคอมพิวเตอร์ (ถ้าจำเป็น)
หากจำเป็นหรือสะดวกในการควบคุมคุณสามารถใช้คอมพิวเตอร์หรือแล็ปท็อป ในการทำเช่นนี้คอมพิวเตอร์ต้องมีบลูทู ธ เราสร้างการสื่อสารกับโมดูลของเราผ่านการควบคุมบนคอมพิวเตอร์ ต่อไปเราต้องการเทอร์มินัลเพื่อส่งคำสั่ง สะดวกสำหรับคุณ หลังจากเขียนเฟิร์มแวร์ BT_WASD แล้วการควบคุมจะดำเนินการโดยปุ่ม (คำสั่ง) ต่อไปนี้:
ไปข้างหน้า
e - ไปทางซ้ายและไปข้างหน้า
q - ขวาและไปข้างหน้า
กลับ -
z - ด้านหลังและซ้าย
x - ด้านหลังและขวา
a - เหลือไว้
d - ถูกต้อง
f - หยุด
การป้อนคำสั่งอย่างต่อเนื่องไม่สะดวกดังนั้นฉันแนะนำให้ใช้โปรแกรมเพื่อส่งคำสั่ง ฉันใช้ Z-Controller ในโปรแกรมให้เลือกพอร์ต (พอร์ต com ผ่านการเชื่อมต่อ) และกำหนดค่าปุ่มสำหรับคำสั่ง ตั้งค่าว่างและใช้งานง่าย
ฉันหวังว่ามันน่าสนใจและมีประโยชน์
