


ดังนั้นการใช้เลโก้เทคนิคจากลูกชายของฉันและที่บ้าน Arduino Nano เริ่มรวมนักออกแบบเหล่านี้เข้าด้วยกัน
เราจะต้อง:
- Lego Technic (ชุด 42029 และ 42033)
- Arduino Nano (ลิงก์ไปยังบอร์ด)
- DRV 8833
- ไดรฟ์เซอร์โว 2 ตัว SG-90
- ตัวรับสัญญาณ IR
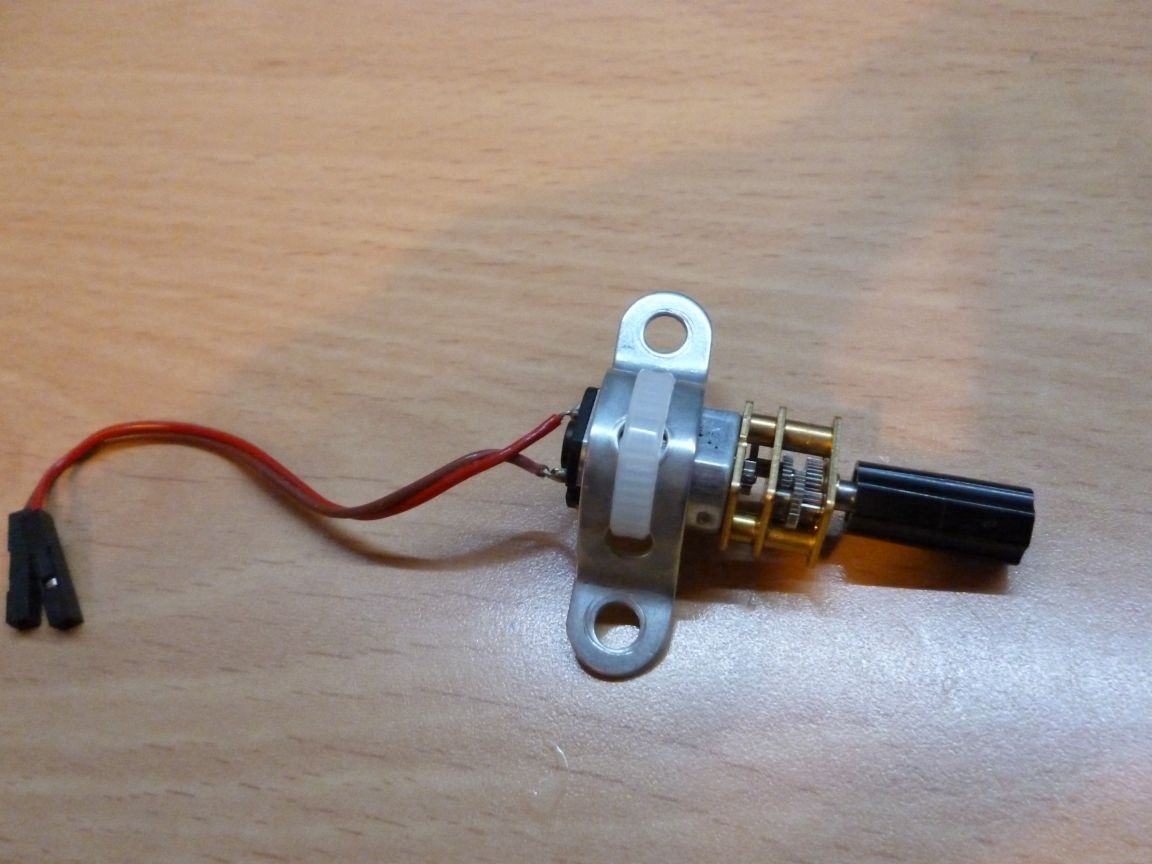
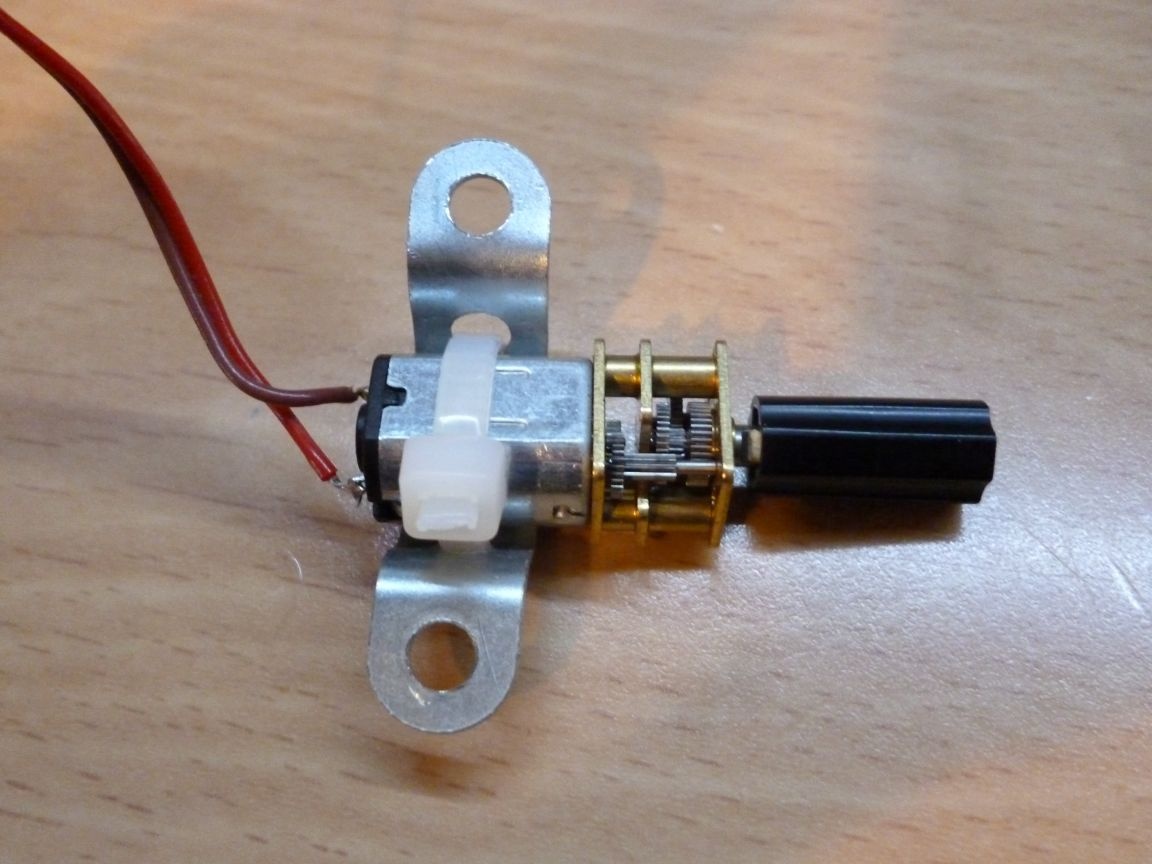
- มอเตอร์เกียร์
- LED 2 ดวง
- ตัวต้านทาน 2 ตัว 150 โอห์ม
- ตัวเก็บประจุ 10v 1000uF
- หวีเดี่ยว 2 แถว PLS-40
- 2 ขั้วต่อ PBS-20
- ตัวเหนี่ยวนำ 68mkGn
- แบตเตอรี่ NI-Mn 1.2v 1,000mA จำนวน 4 ก้อน
- เชื่อมต่อพ่อแม่สองขากับสาย
- Homutik
- สายไฟที่มีสีต่างกัน
- ประสาน
- ขัดสน
- หัวแร้ง
- สลักเกลียว 3x40 และถั่วและแหวนสำหรับพวกเขา
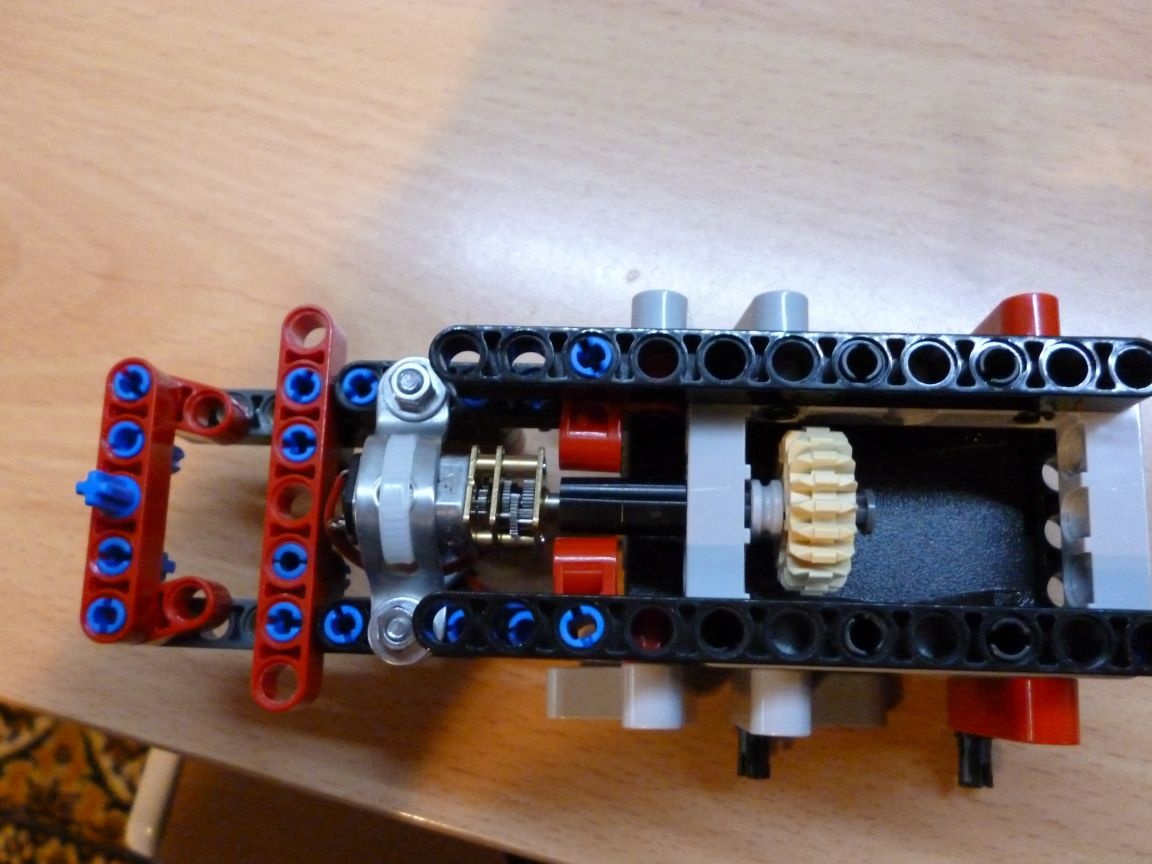
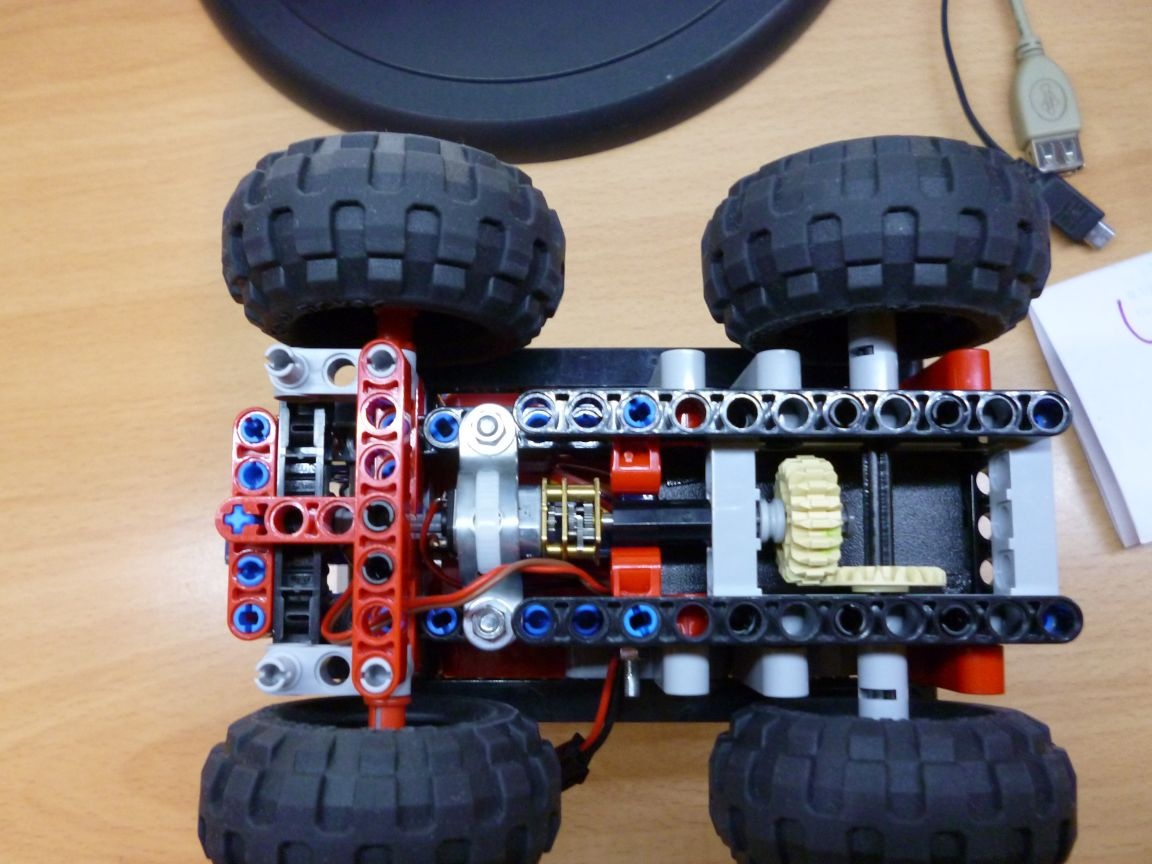
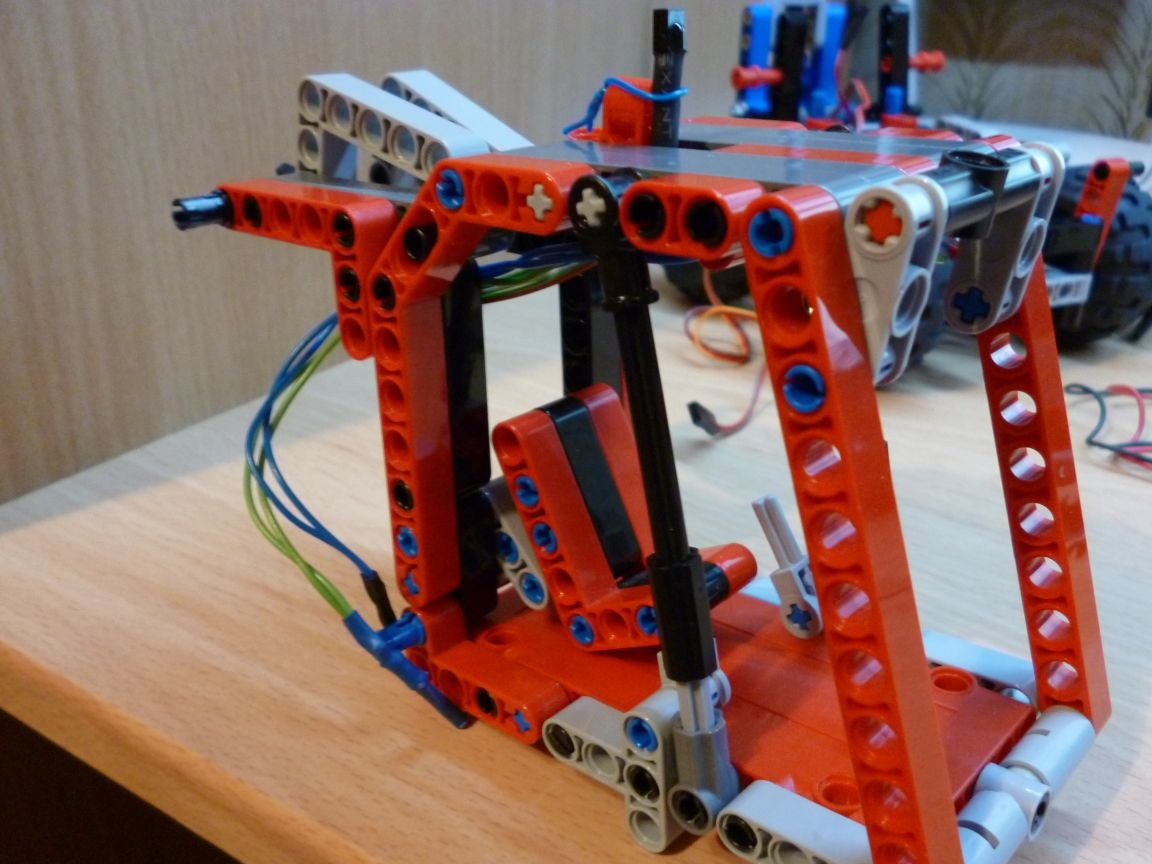
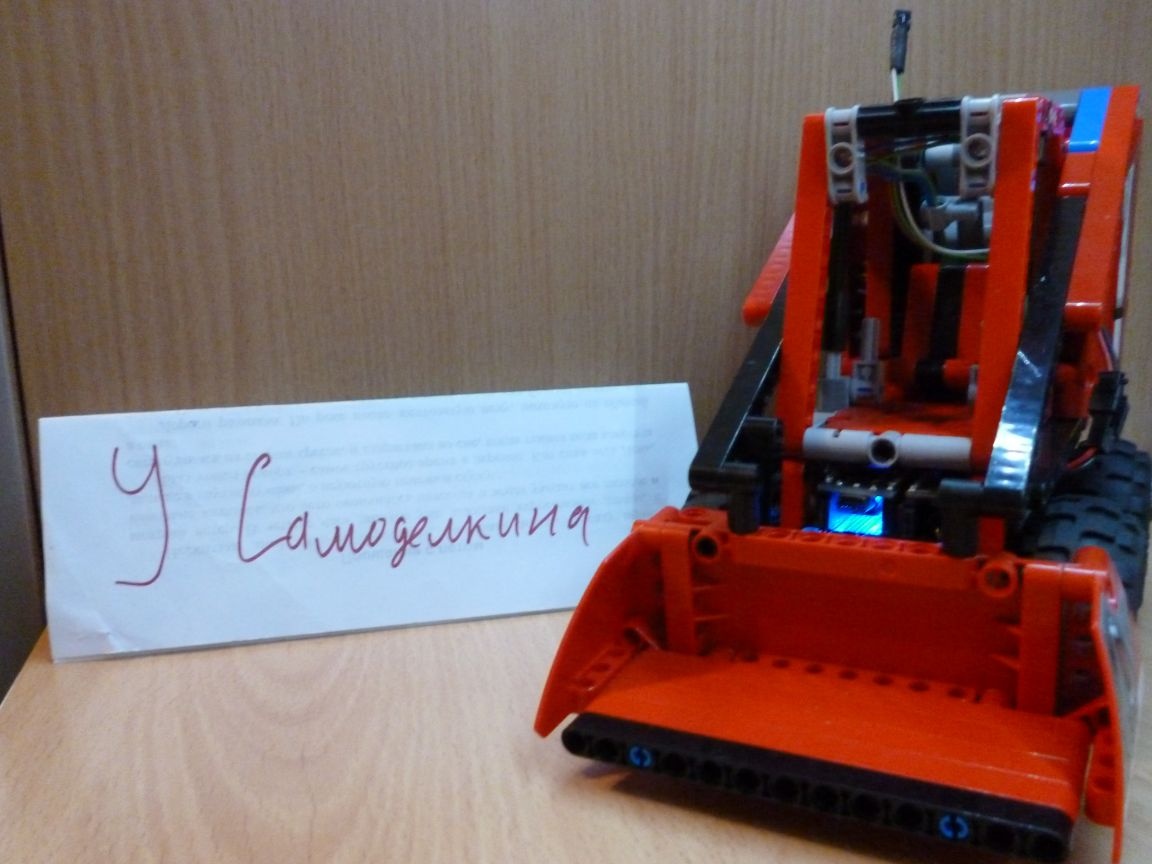
ขั้นตอนที่ 1 ประกอบแชสซีและเพลาขับ
คุณสามารถประกอบแชสซีใด ๆ จาก Technic ได้แล้วมันกลับกลายเป็นเช่นนี้
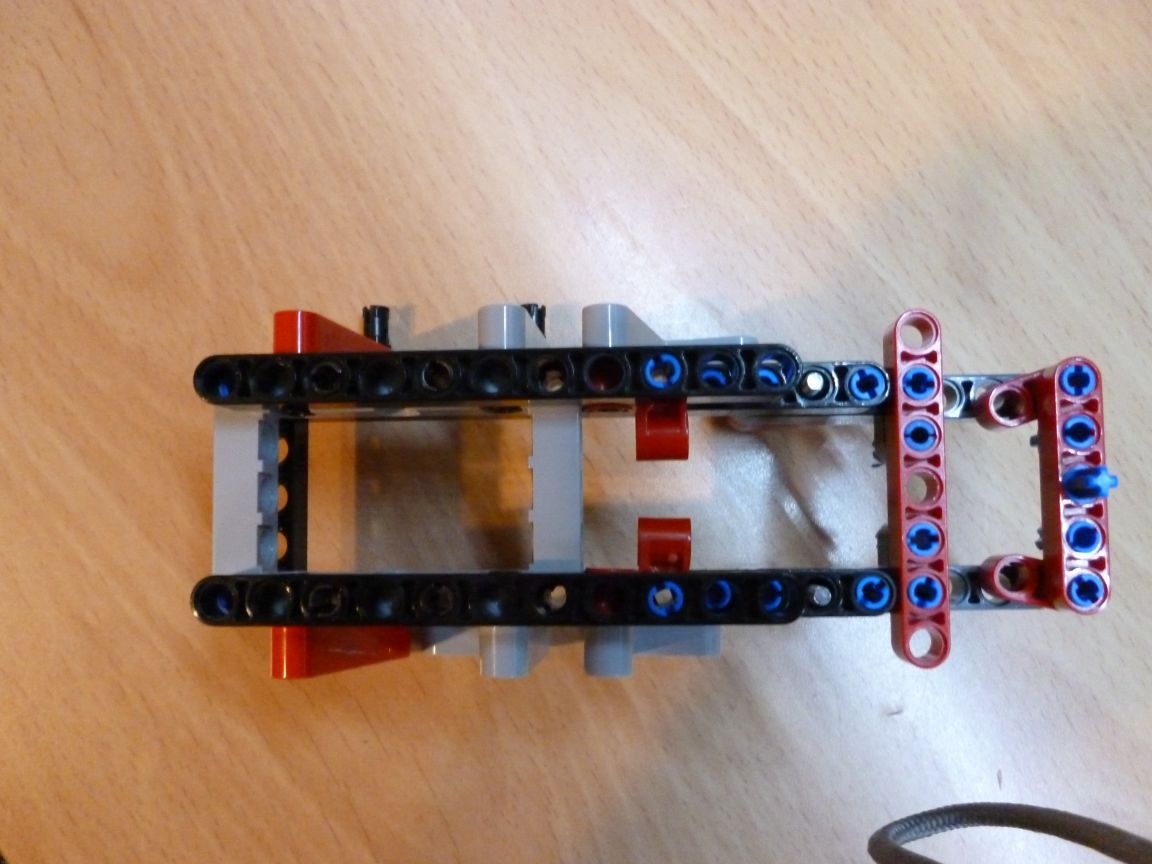
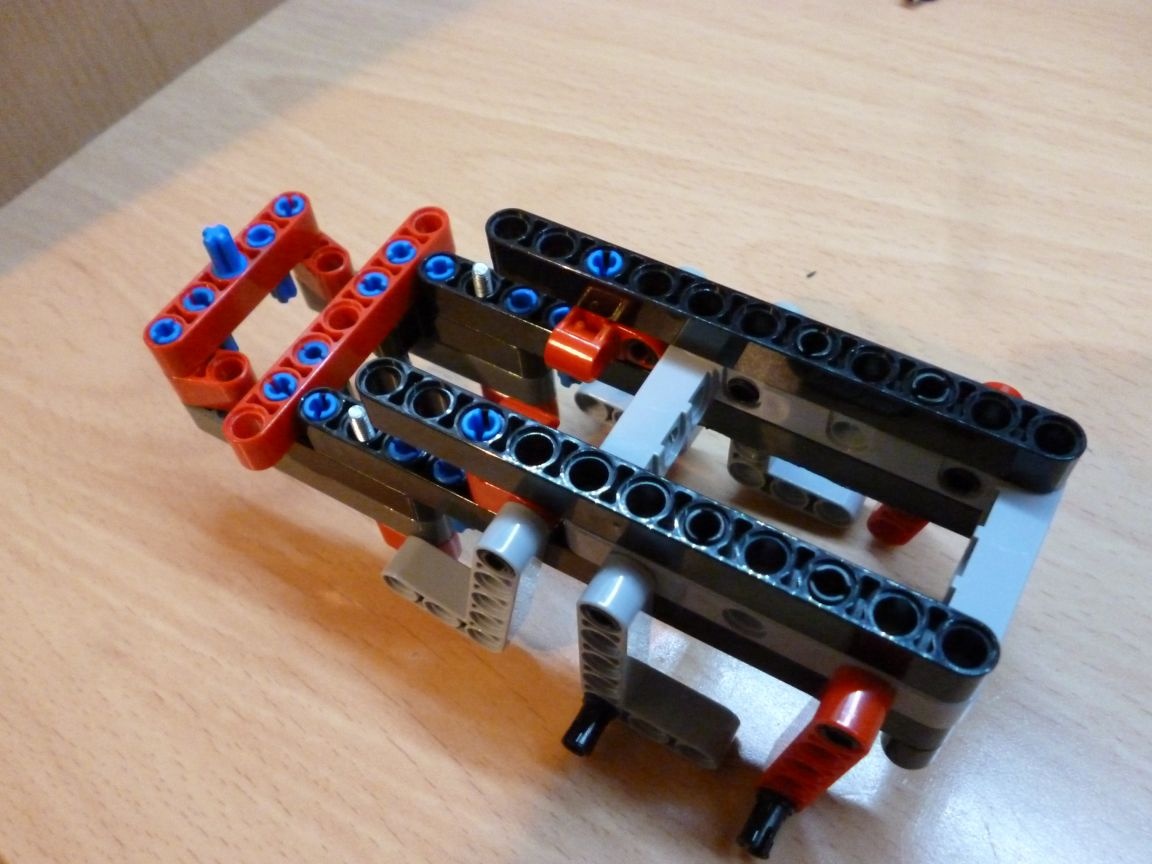
มีปัญหาในการเชื่อมต่อมอเตอร์เกียร์กับชิ้นส่วนของผู้ออกแบบเท่านั้น ฉันตัดสินใจดังนี้ดังนี้: วางแกนของชุดมอเตอร์เกียร์ที่เชื่อมต่อและใส่เศษของการแข่งขันสำหรับการตรึง สำหรับการติดตั้งมอเตอร์เกียร์ใช้พลาสติกโลหะจากนักออกแบบเหล็กและที่หนีบ มันเปิดออกดังต่อไปนี้:
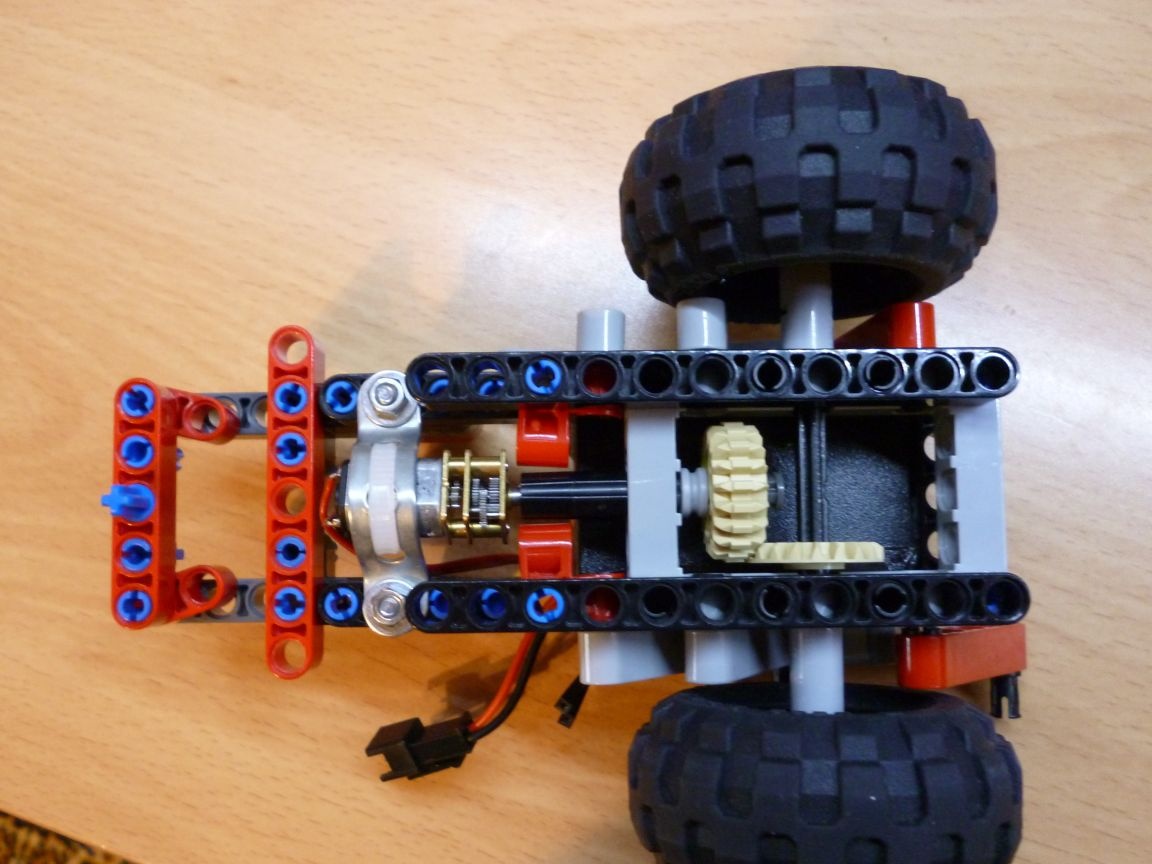
ต่อไปเราจะติดตั้งการออกแบบที่เกิดขึ้นบนตัวถังโดยใช้สลักเกลียว 3x40:
และใส่ล้อ:
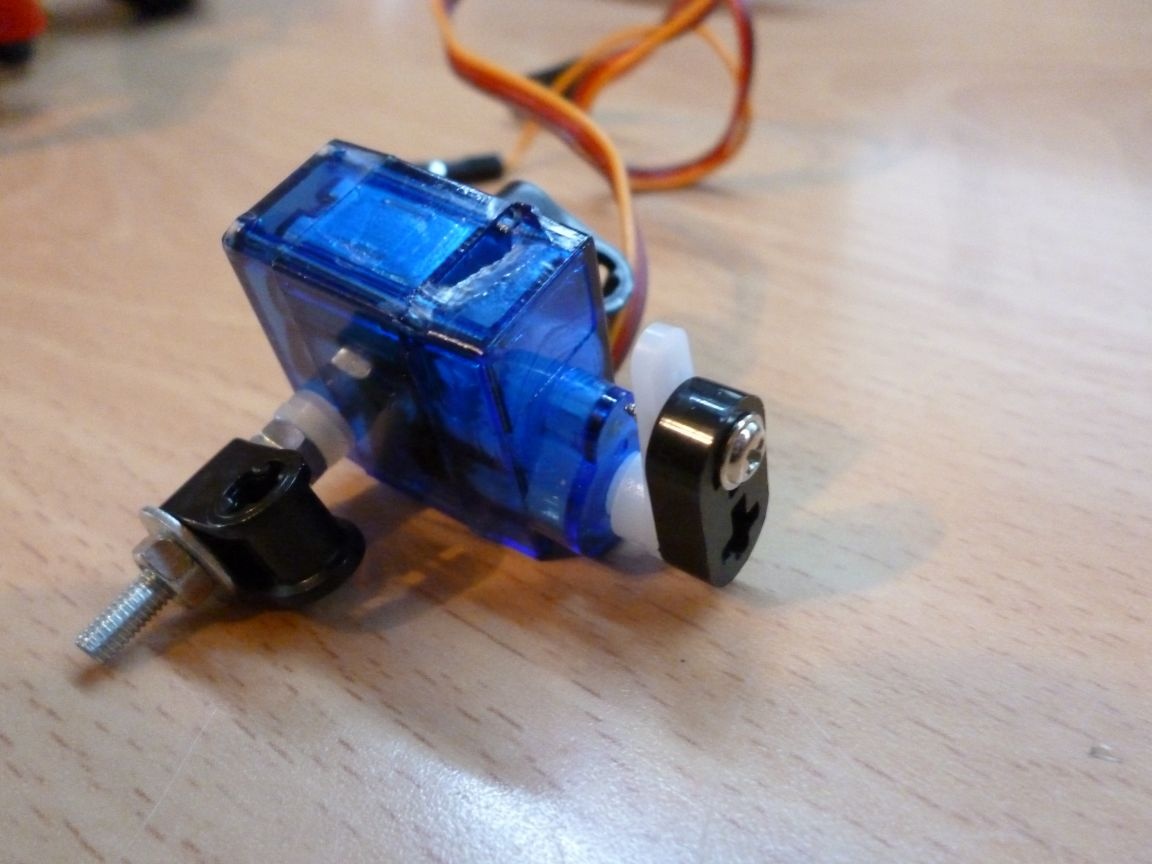
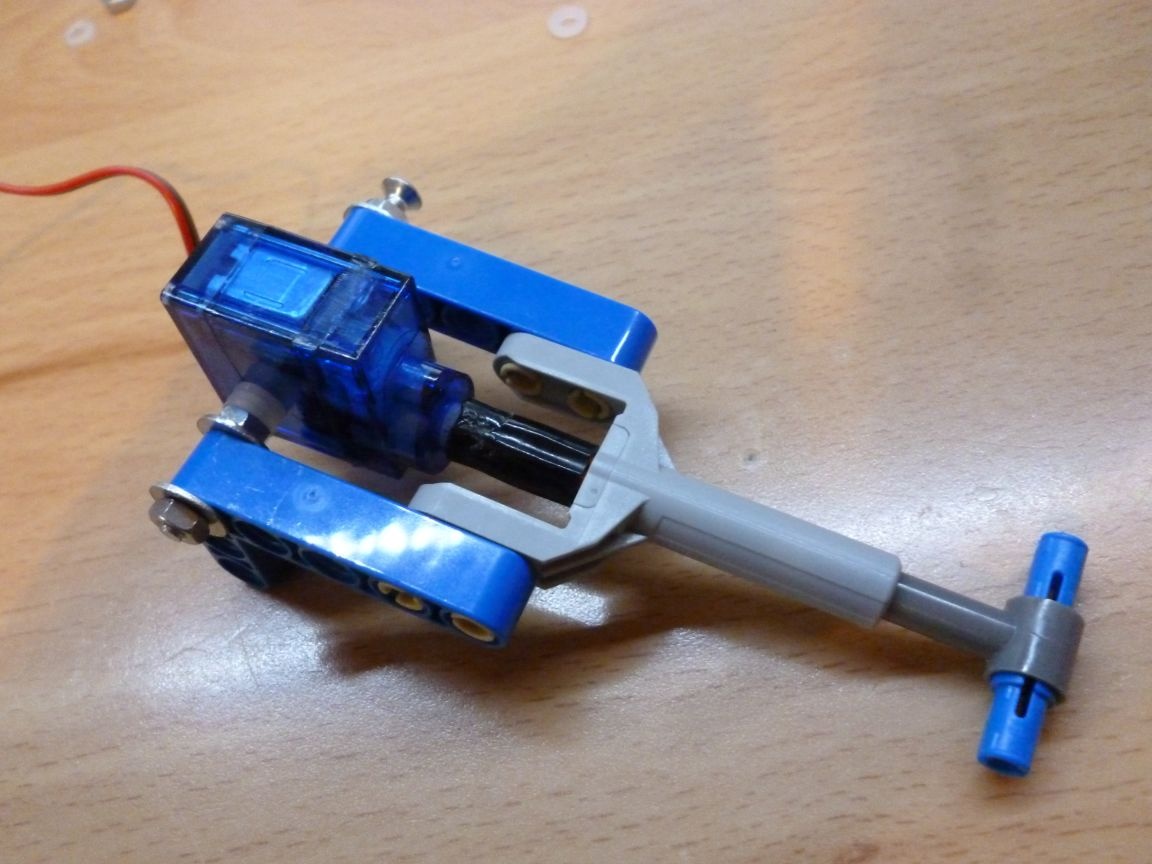
ขั้นตอนที่ 2 ล้อหมุน
เพื่อดำเนินการหมุนเอาเซอร์โว SG-90 มันเป็นสิ่งจำเป็นที่จะต้องเจาะอย่างระมัดระวังเพื่อที่จะไม่สัมผัสชิ้นส่วนภายในผ่านรูที่มีขนาดเส้นผ่าศูนย์กลาง 3.2 มม. หรือเพียงแค่ตัดด้วยมีดเครื่องเขียน

เราใส่สลักเกลียวเข้าไปในรูที่ทำและทำมุมตามขอบและแก้ไขด้วยน็อต:

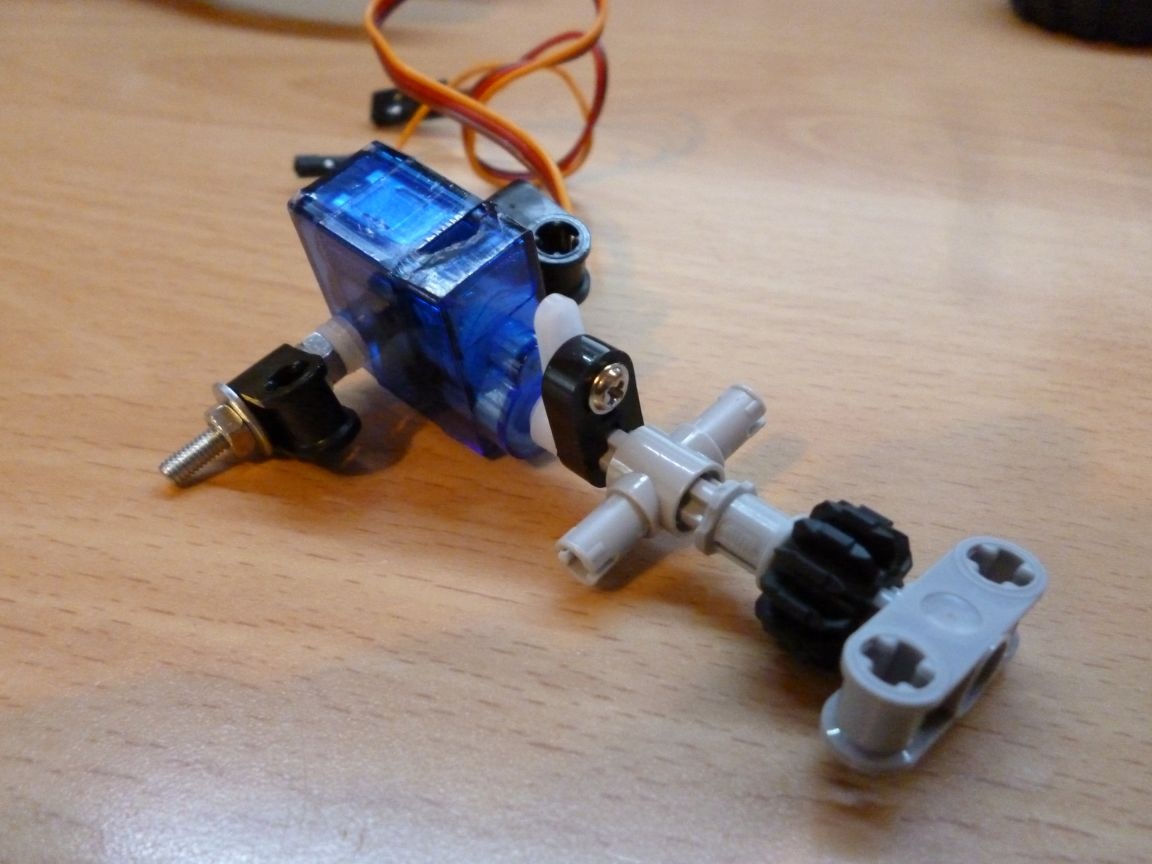
บนเพลาของเซอร์โวเราวางคันโยกที่มีชิ้นส่วนที่เมาจากเลโก้:
และในที่สุดก็หมุนประกอบ:
เราใส่ตัวถัง:

ใส่ล้อ:
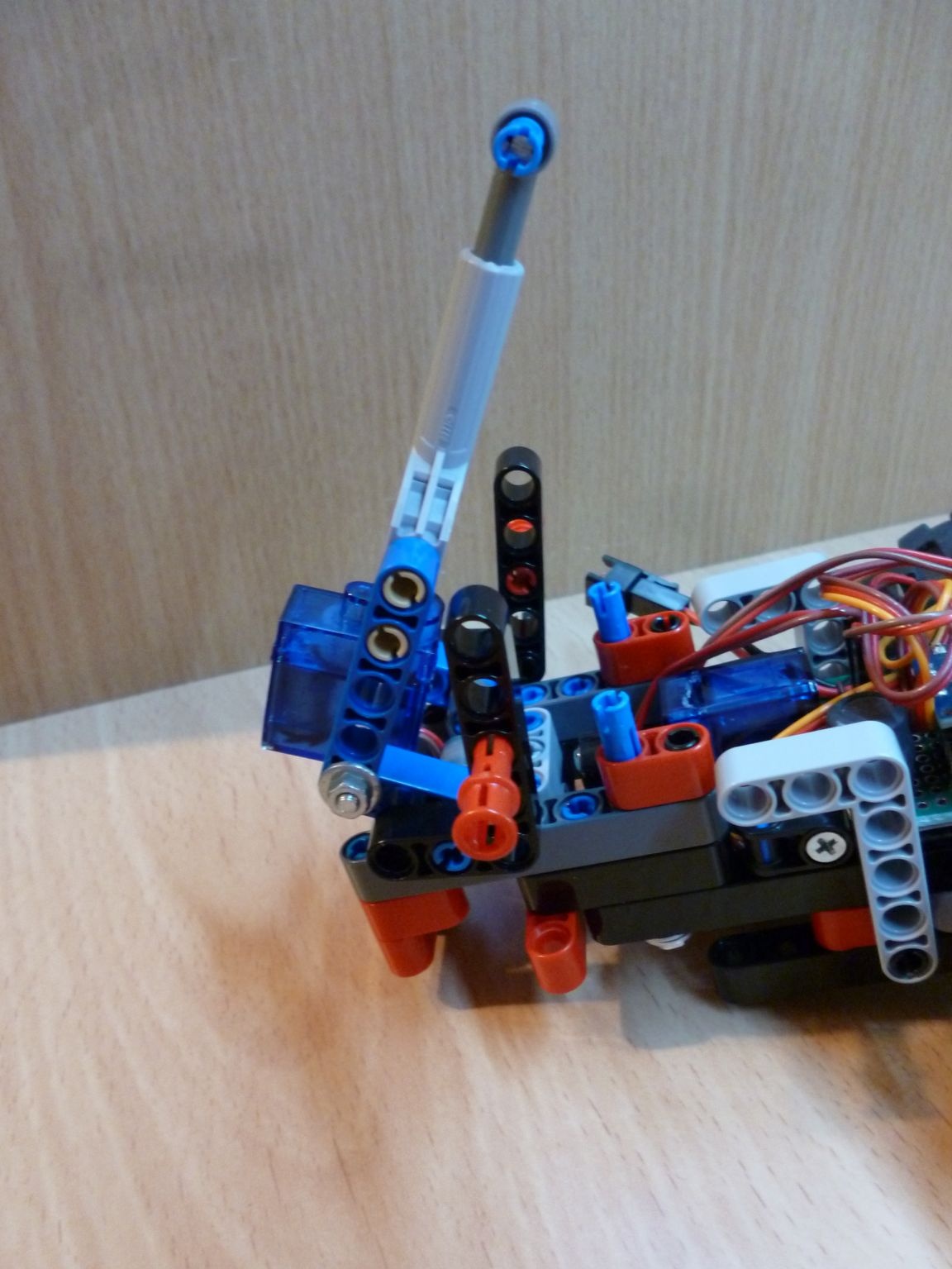
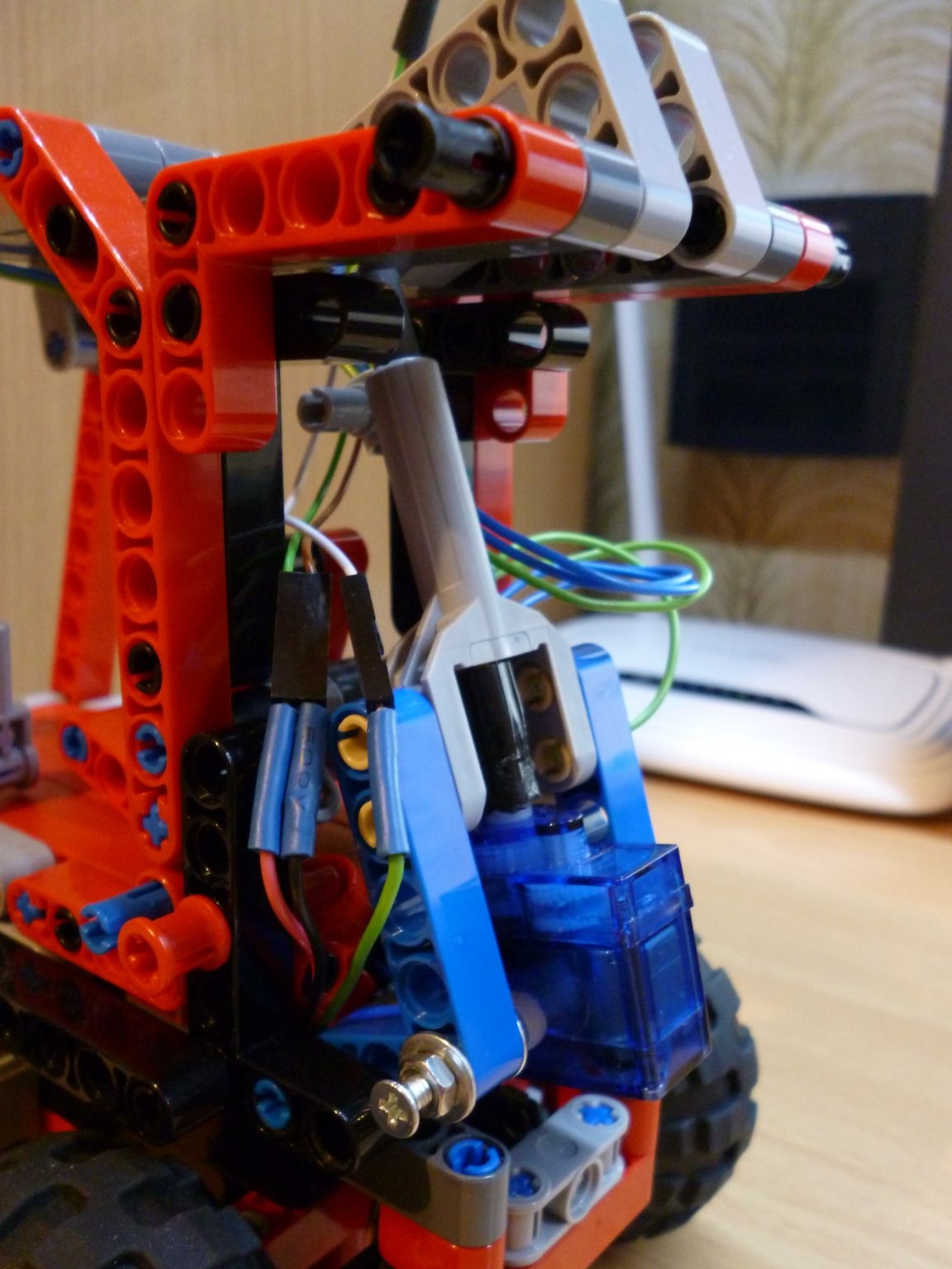
ขั้นตอนที่ 3 ยกเกียร์
เพื่อยกถังเอา servo ดัดแปลง SG-90 จุดรวมของการดัดแปลงคือการถอดตัวควบคุมภายในและบัดกรีสายไฟโดยตรงไปยังมอเตอร์เพื่อที่จะทำให้มอเตอร์เกียร์ออกจากเซอร์โวไดรฟ์นั่นคือเพื่อที่จะสามารถหมุนได้อย่างสมบูรณ์ เช่นเดียวกับในเซอร์โวแรกคุณจะต้องเจาะรูเพื่อติดตั้ง:
ติดตั้งบนโครงเครื่อง:
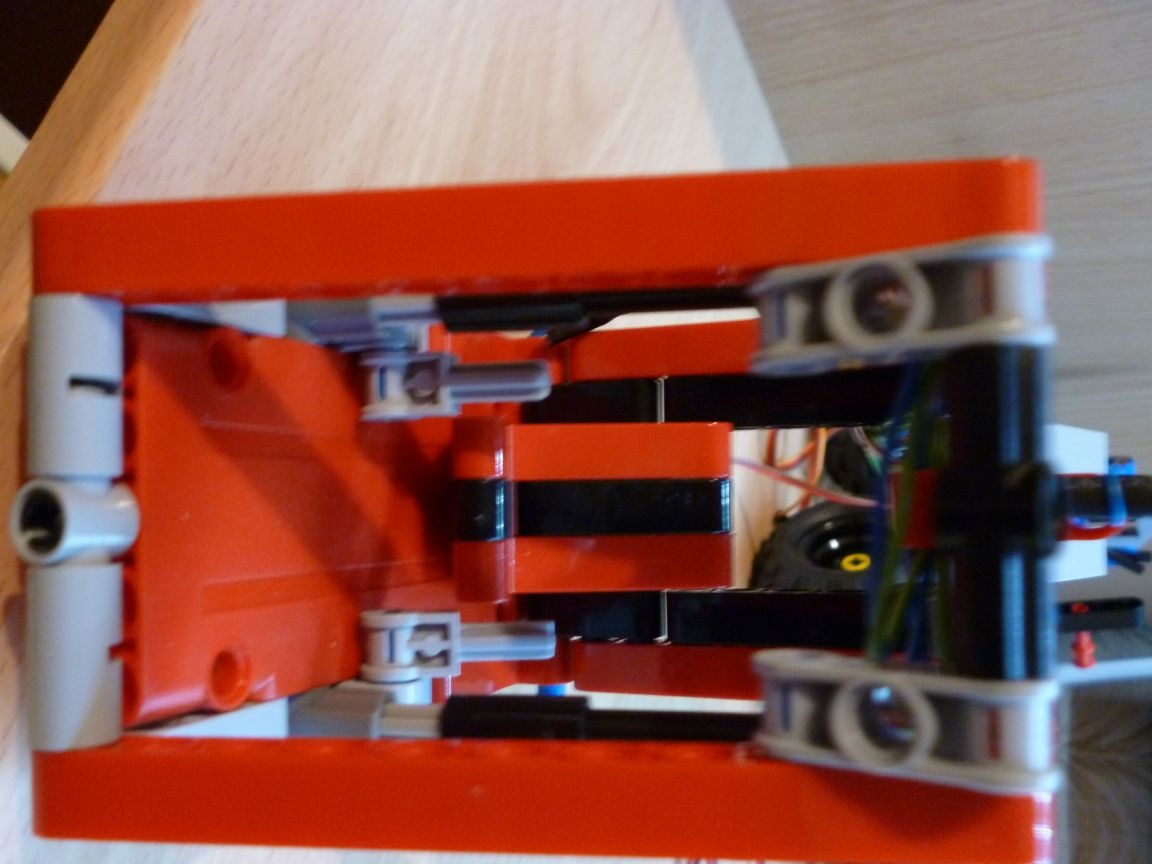
ขั้นตอนที่ 4 รถแท็กซี่
จำเป็นต้องประกอบรถแท็กซี่จากเลโก้เทคนิคจากภาพถ่าย:

ขั้นตอนที่ 5 เป็นช่างไฟฟ้า
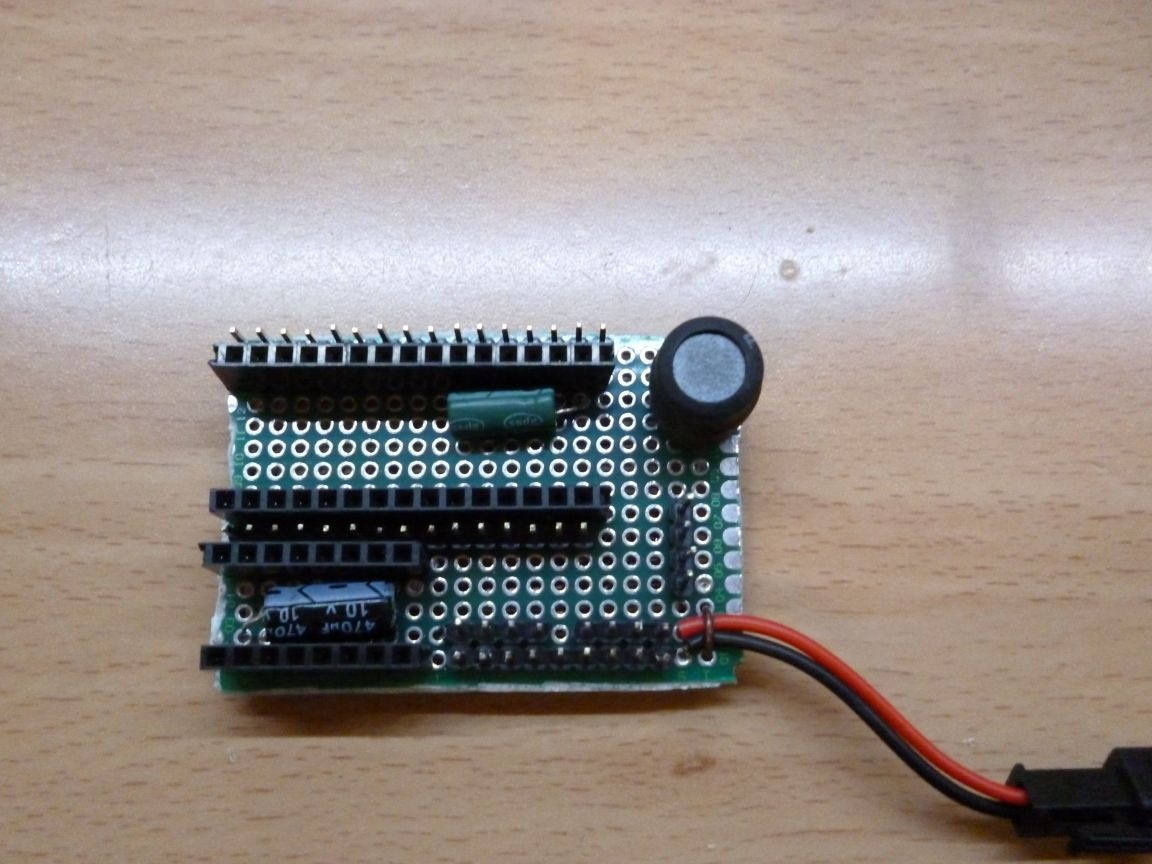
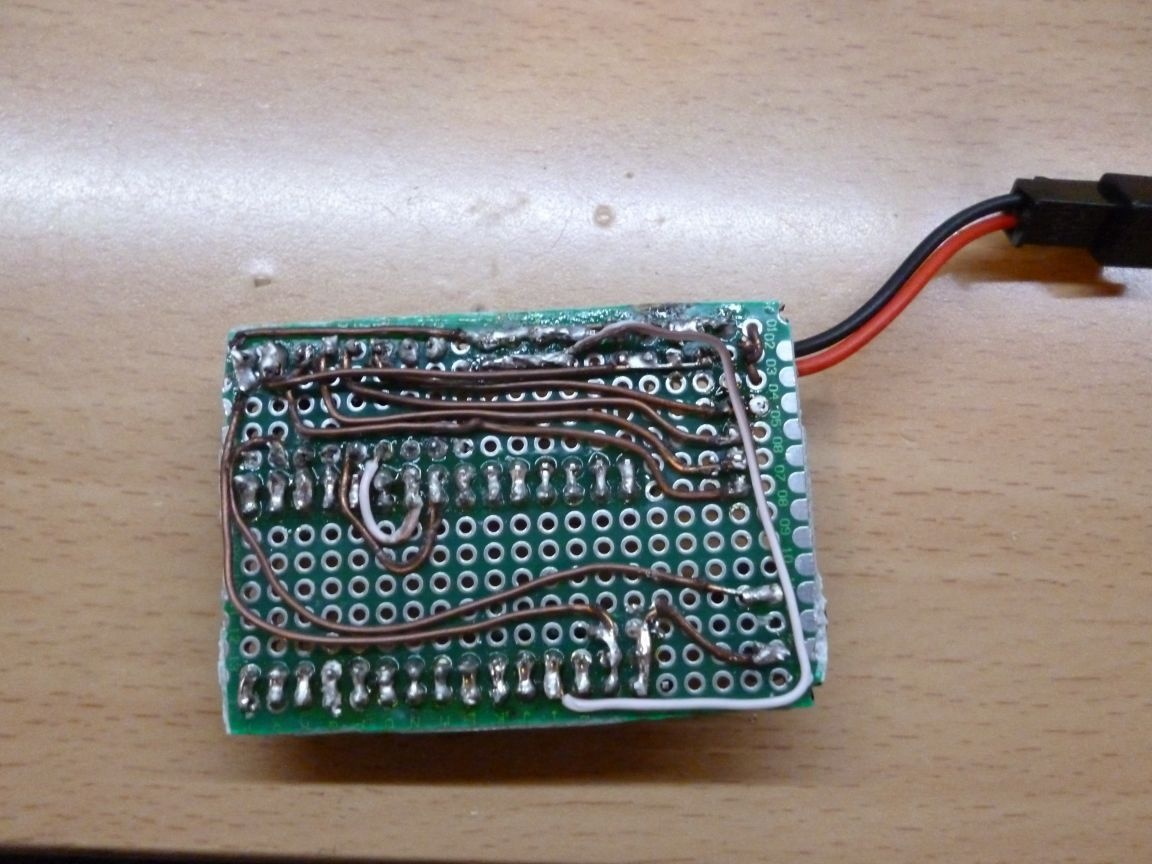
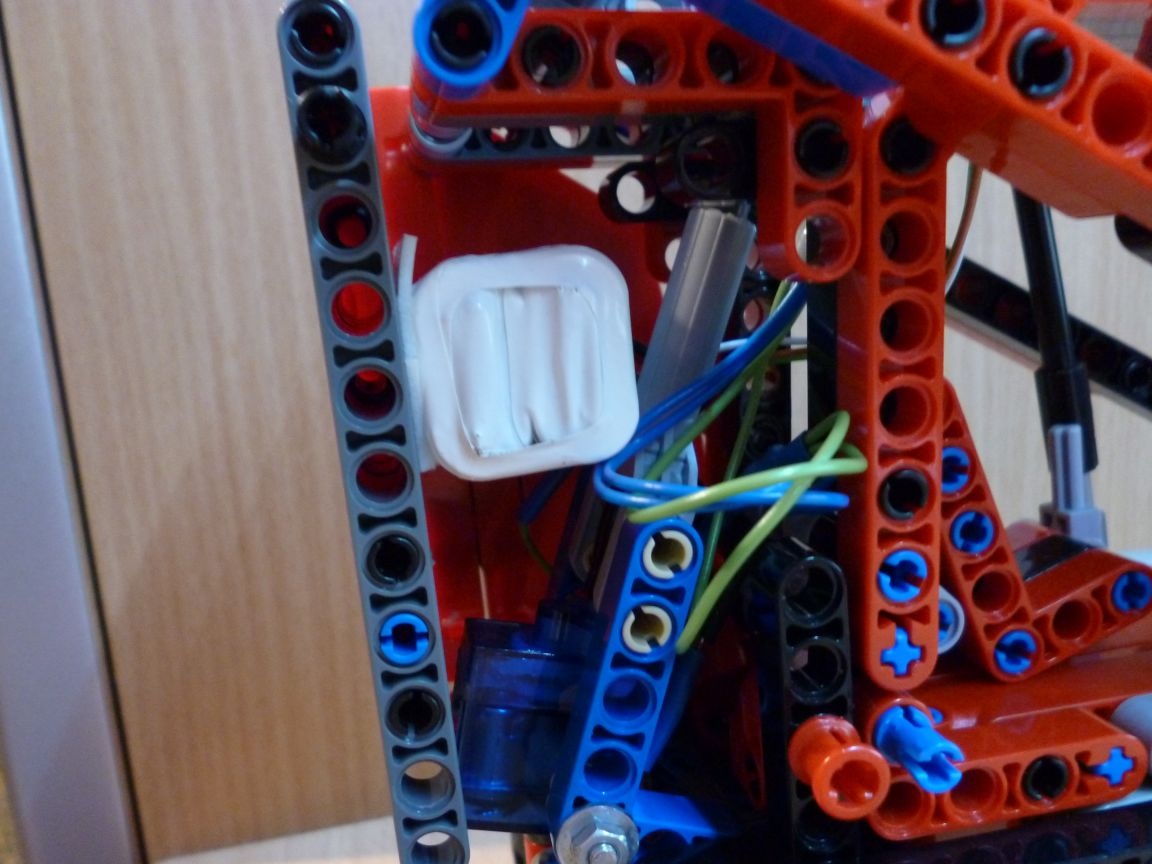
ที่นี่คุณจะต้องใช้หัวแร้ง เพื่อความสะดวกคุณต้องประสานทุกอย่างบนแผงวงจรตามแผนภาพต่อไปนี้:
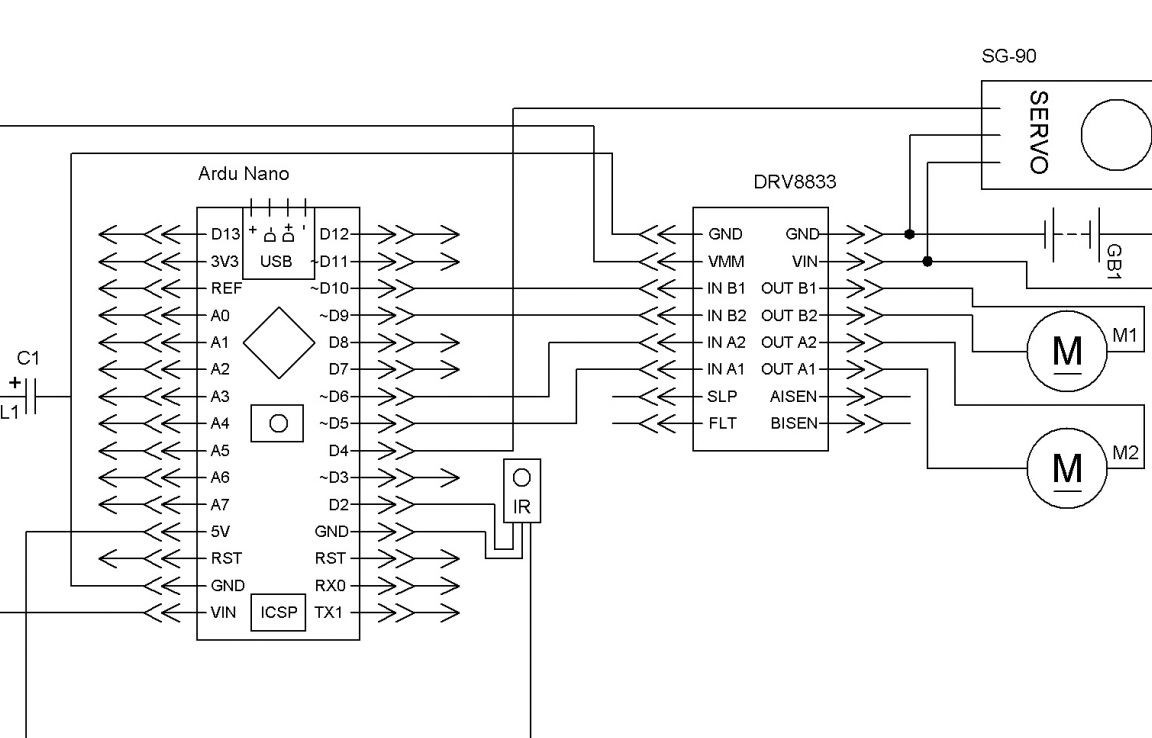
ฉันคิดว่ามันคุ้มค่าที่จะอธิบายเพียงเล็กน้อย: คุณสามารถใช้ตัวเก็บประจุพลังงานต่ำก็ได้คุณยังสามารถหาตัวเหนี่ยวนำได้ทุกชนิดนี่เป็นสิ่งจำเป็นที่จะทำให้แรงดันไฟฟ้าของไมโครคอนโทรลเลอร์คงที่ จำเป็นต้องเลือกตัวต้านทานสำหรับไฟ LED ที่ใช้ ฉันรับตัวรับสัญญาณ IR จากของเล่นเก่า แต่คุณสามารถหาซื้อได้ที่ร้านขายวิทยุ หากมีสัญญาณรบกวนที่แข็งแกร่งเพิ่มตัวเก็บประจุไปยังวงจรพลังงานตัวรับสัญญาณ IR
ฉันได้รับสิ่งนี้:
เราติดตั้ง Arduino Nano และ DRV 8833 ในสถานที่:
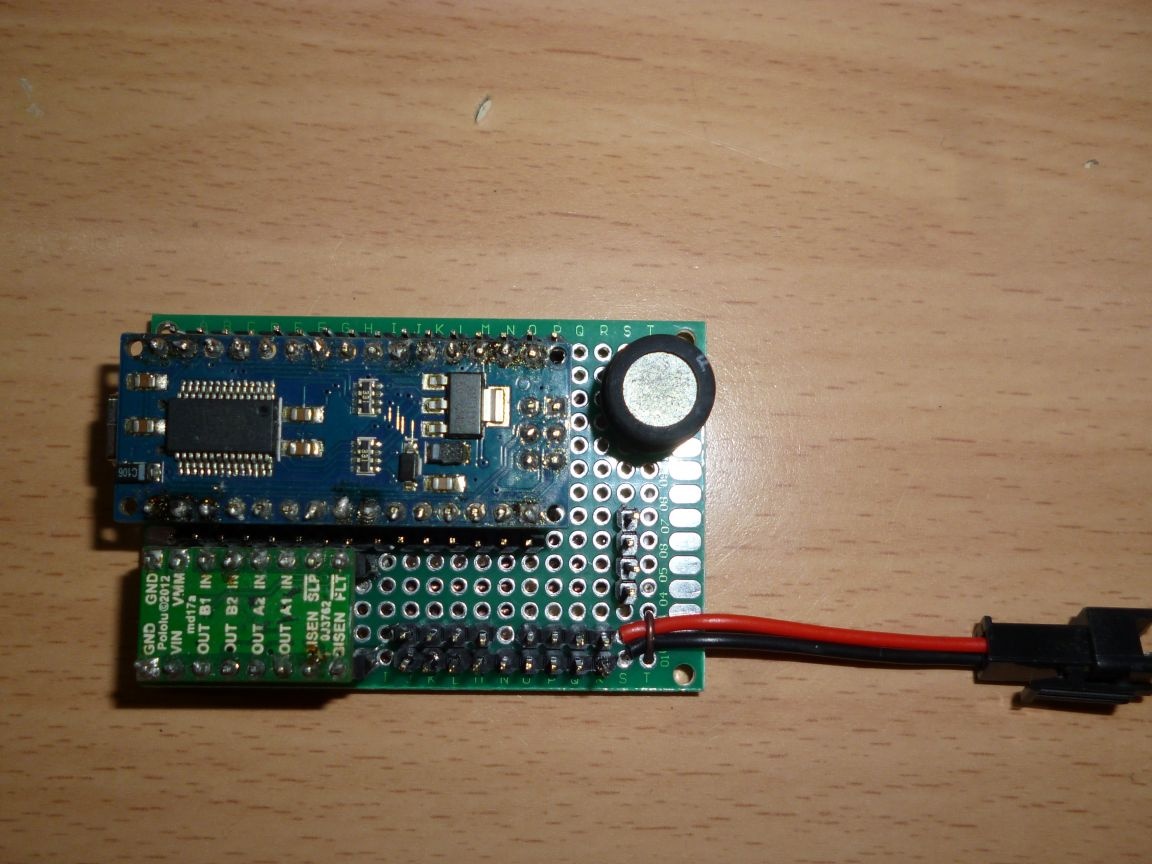
และตอนนี้เราวางบอร์ดบนแชสซี (ถอดล้อเพื่อความสะดวก):
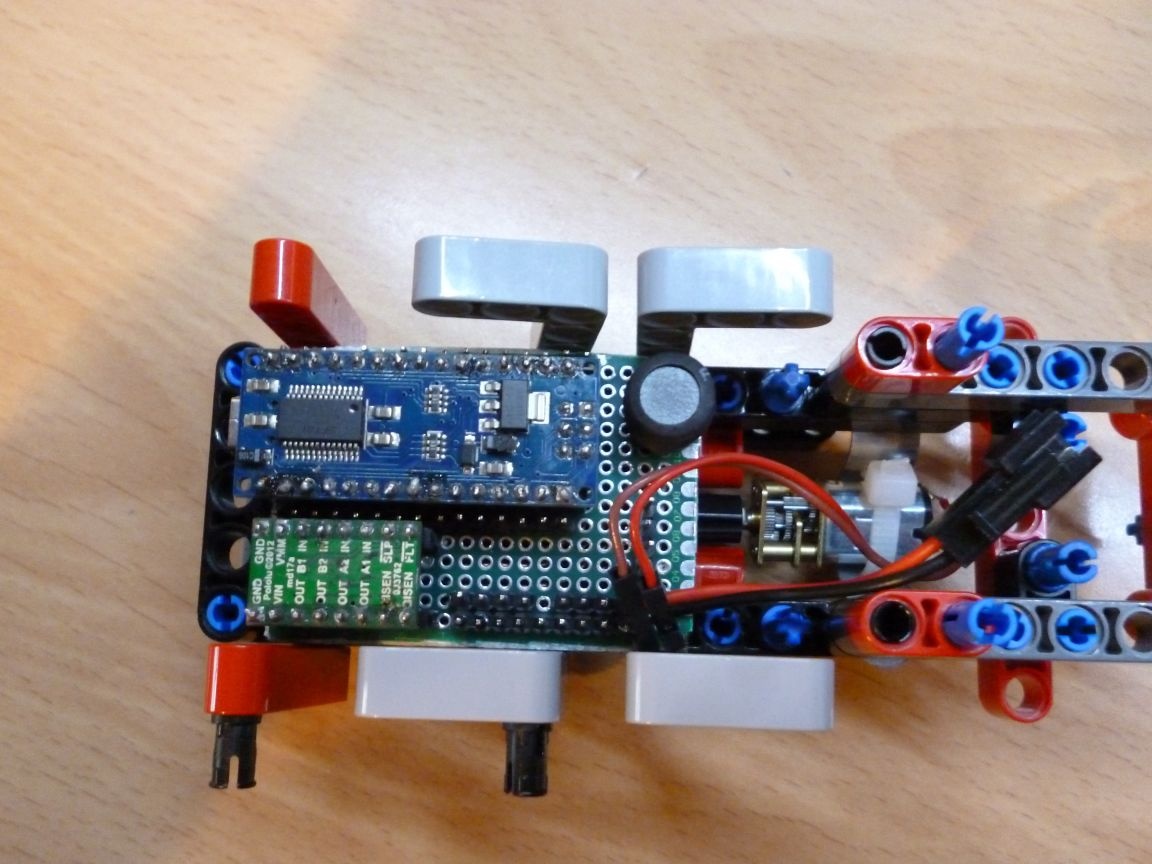
เพื่อการใช้พลังงานฉันใช้แบตเตอรี Ni-Mn 1.2v 1000mA จำนวน 4 ก้อนเชื่อมต่อกันเป็นชุดและพันด้วยเทปพันสายไฟ ฉันจับพวกเขาไปยังเทปสองด้านใต้ฝาปิดห้องโดยสารด้านหลัง
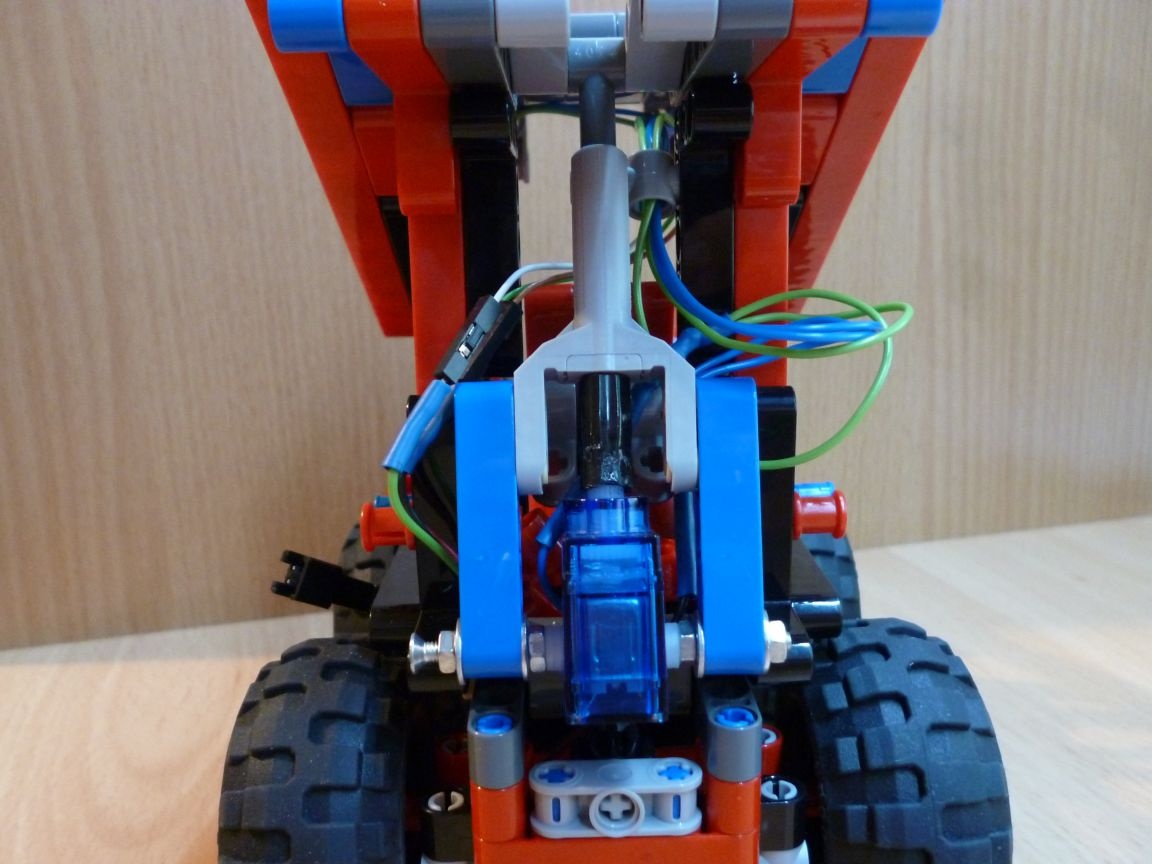
ขั้นตอนการติดตั้ง 6 cab
เราเชื่อมต่อตัวรับสัญญาณ IR, มอเตอร์และไดโอดตามแผนภาพใส่ cab ไว้ด้านบนของแชสซี, แก้ไขที่ฝากข้อมูล (ที่ฝากข้อมูลใด ๆ สามารถทำได้):

ขั้นตอนที่ 7 เฟิร์มแวร์
ฉันกำลังเขียนโปรแกรมใน Arduino IDE ก่อนอื่นคุณต้องกรอกเฟิร์มแวร์ของฉันและผ่านเทอร์มินัลดูรหัสการควบคุมระยะไกลที่คุณกำลังจะใช้ คุณสามารถใช้รีโมทควบคุม IR ได้ตัวอย่างเช่นจากทีวีหรือเครื่องเล่นดีวีดี เมื่อคลิกปุ่มในเทอร์มินัลเราจะเห็นรหัสของปุ่มกดเขียนลงบนแผ่นกระดาษ เราทำสิ่งนี้กับปุ่มทั้งหมดที่เราต้องการตั้งโปรแกรมการทำงานของโหลดเดอร์ ถัดไปแก้ไขภาพร่าง เราจดบันทึกรหัสที่เราบันทึกไว้สำหรับการกระทำที่จำเป็นลงไปและแฟลชอีกครั้ง
การแทรก
วิดีโอตัวโหลด: