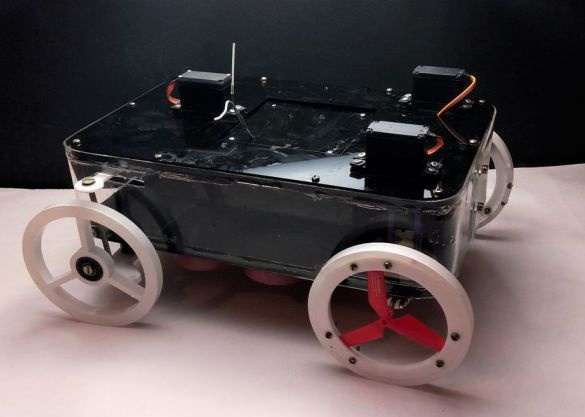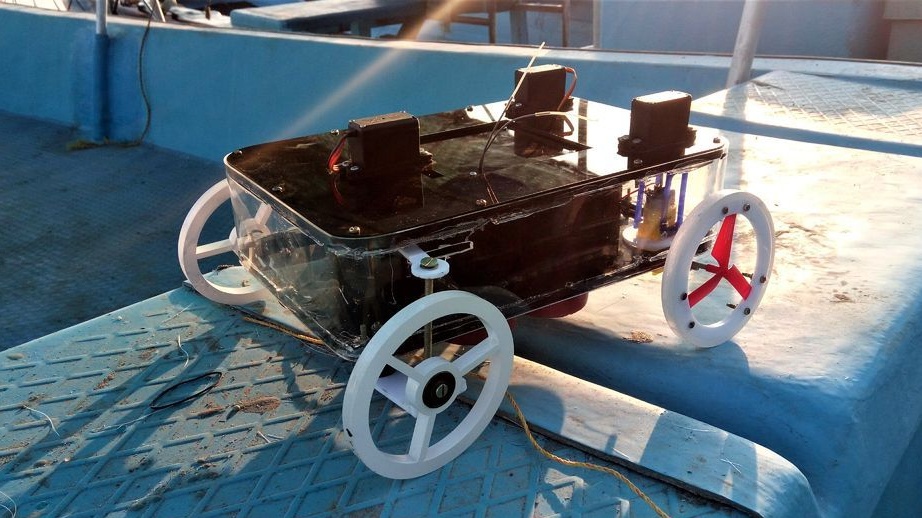



ในบทความนี้เราจะพิจารณาการผลิตโดยช่างฝีมือชาวอินเดียเกี่ยวกับยานพาหนะทุกพื้นที่ซึ่งเคลื่อนที่ทั้งทางบกและทางน้ำ ยานพาหนะภูมิประเทศทั้งหมด ประกอบด้วยแท่นลอยที่มีล้อและใบพัด กลไกถูกควบคุมโดยรีโมทคอนโทรลผ่าน Arduino UNO
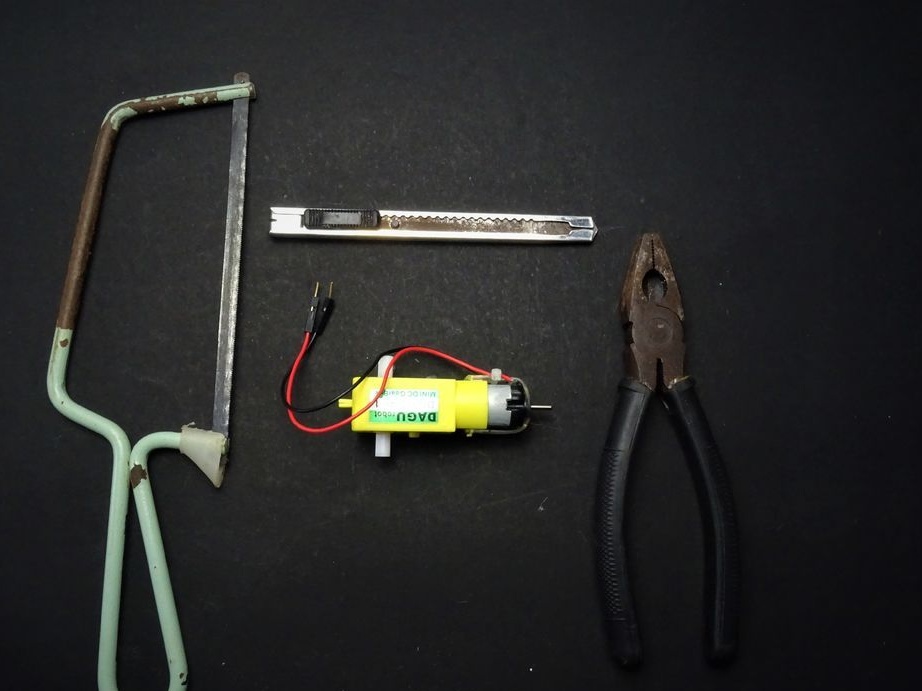
เครื่องมือและวัสดุ:
-
-AKB 9V;
-Vyklyuchatel;
-Akril;
-Fanera;
(โดยการอ้างอิงแบริ่งคือ 8 x 16 x 5 มม. ผู้เขียนระบุ 8 * 22 มม.)
- สองใบพัด
-Krepezh;
-Poplavki;
- ปืนสีฟ้า;
- กาวซุปเปอร์
อีพอกซีเรซิน
- เหล็กหล่อ
-Drel;
- เครื่องตัดเลเซอร์
-Pila;
- ไขควง
-Drel;
- เหล็กหล่อ
A-ผ้า
- คอมพิวเตอร์พร้อมซอฟต์แวร์


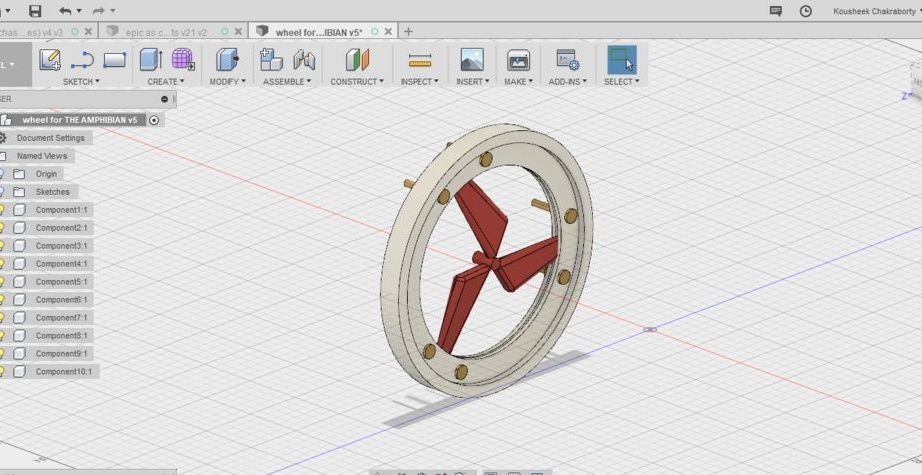
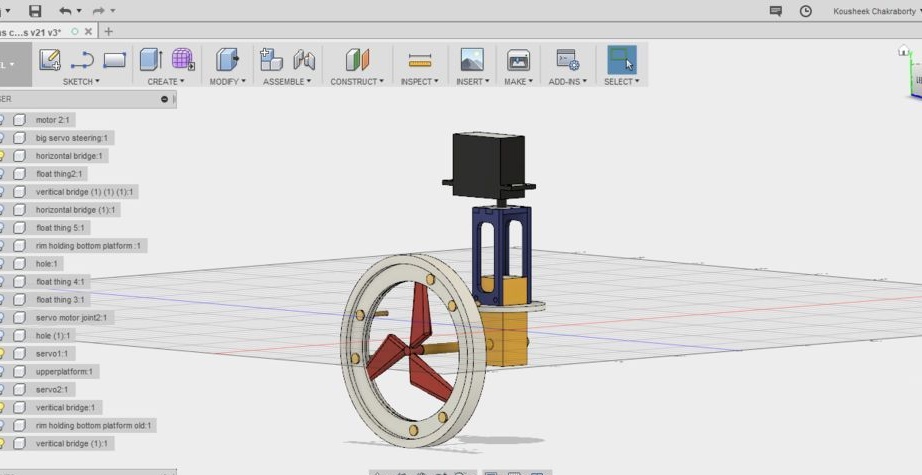
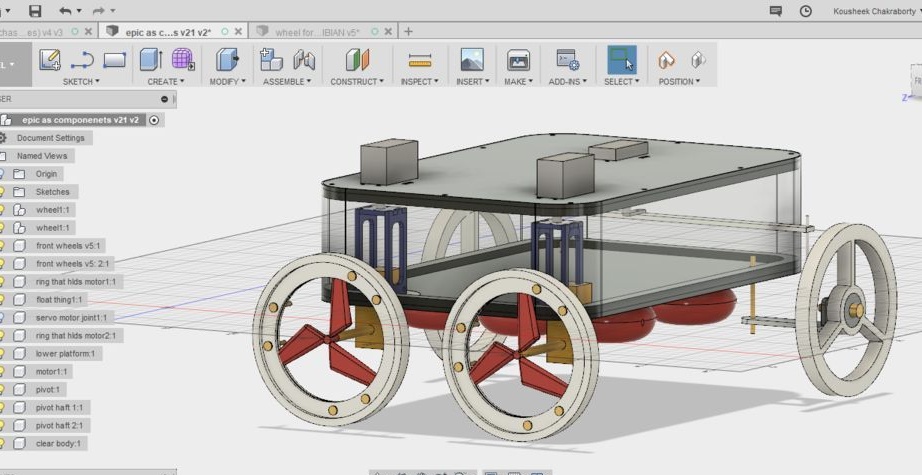
ขั้นตอนที่หนึ่ง: การออกแบบ
ในการสร้างโครงการเจ้านายใช้โปรแกรม Fusion 360 ปัญหาทั้งหมดคือการรวมการเคลื่อนไหวบนบกและในน้ำ เมื่อทำการออกแบบล้อผู้เชี่ยวชาญได้พัฒนาระบบที่สกรูจะเปิดในน้ำ แต่ด้วยความซับซ้อนของการออกแบบพวกเขาเพียงรวมใบพัดจากของเล่นเด็กเข้าไปในล้อ สิ่งนี้จะช่วยให้ล้อรถเคลื่อนที่ได้ทุกพื้นที่บนพื้นดินและเมื่อพวกเขาลงไปในน้ำสกรูจะเปิดขึ้น
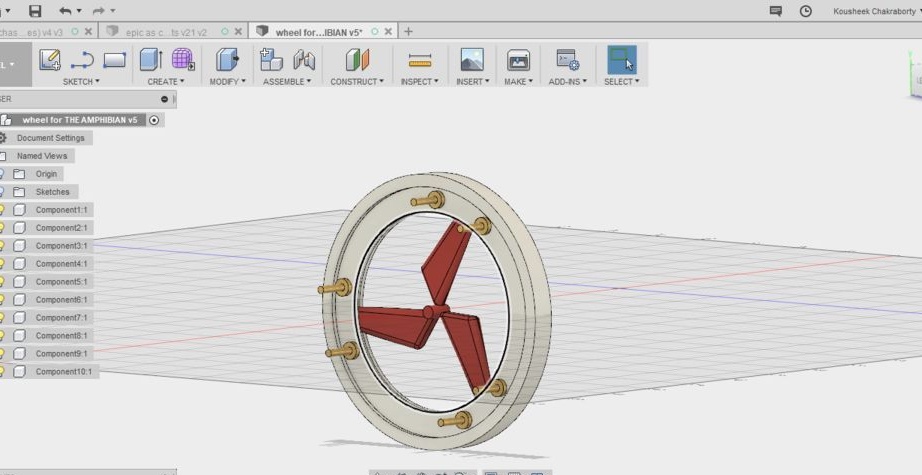
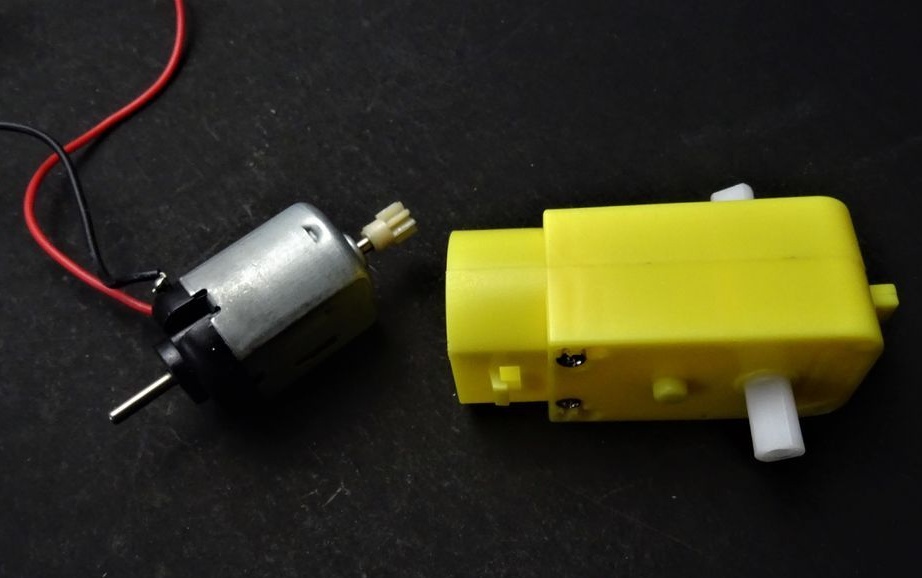
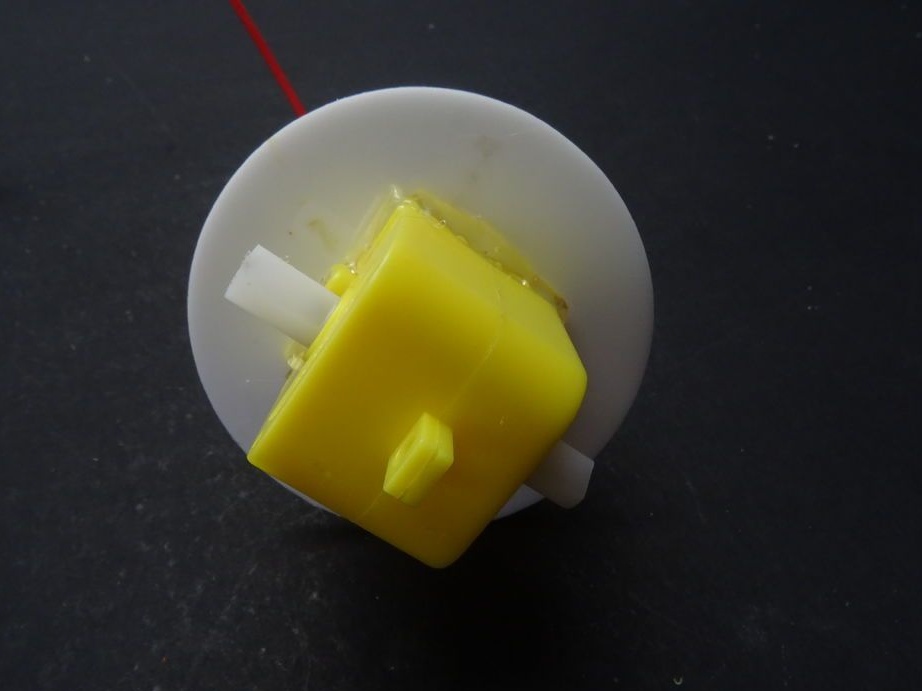
ในการใช้แนวคิดนี้คุณจะต้องสามารถหมุนล้อหลังในแนวตั้งฉากกับยานพาหนะทุกพื้นที่เมื่อขับรถบนน้ำ สิ่งนี้เป็นไปได้เมื่อมีการนำเครื่องยนต์ออกจากกรอบ กระปุกเกียร์พลาสติกและน้ำที่เข้ามาจะไม่เป็นอันตราย
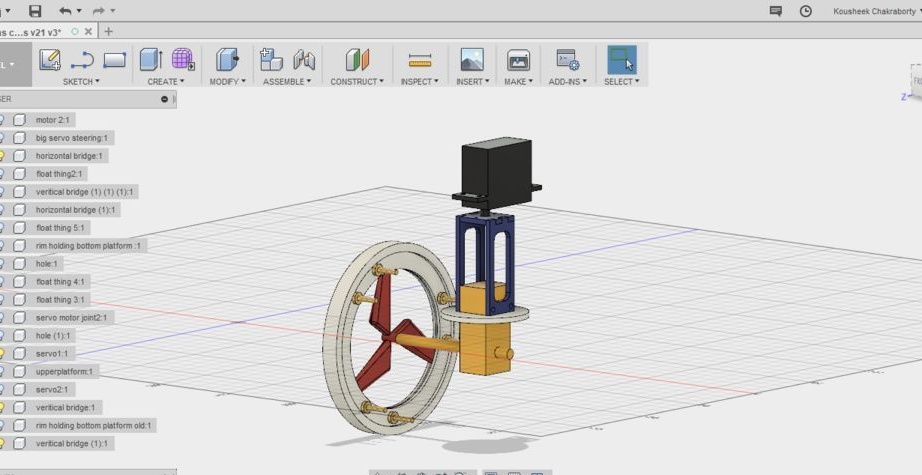
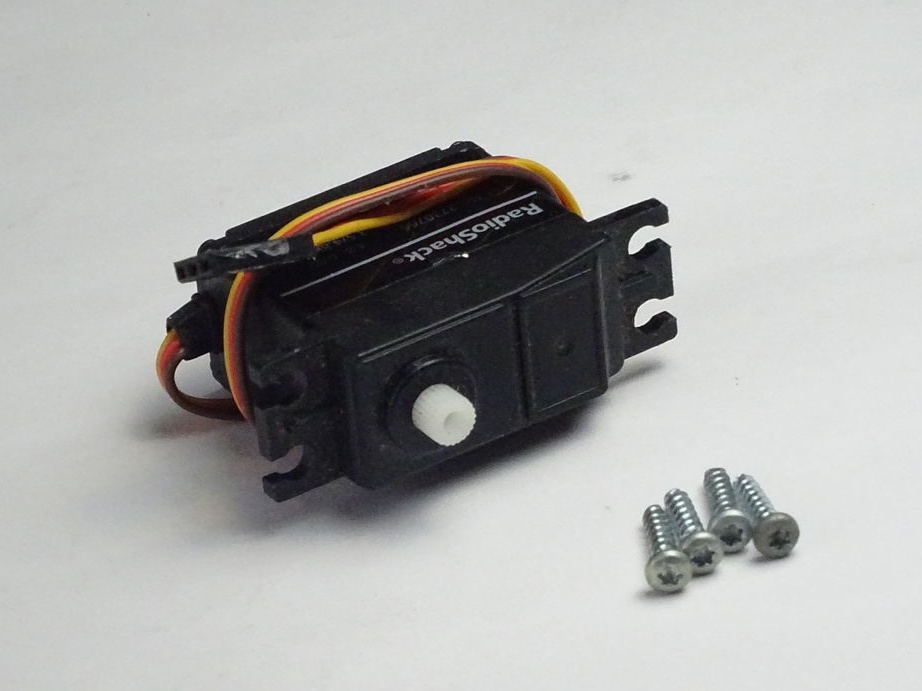
การหมุนของสกรูล้อจะดำเนินการโดยใช้ไดรฟ์เซอร์โว
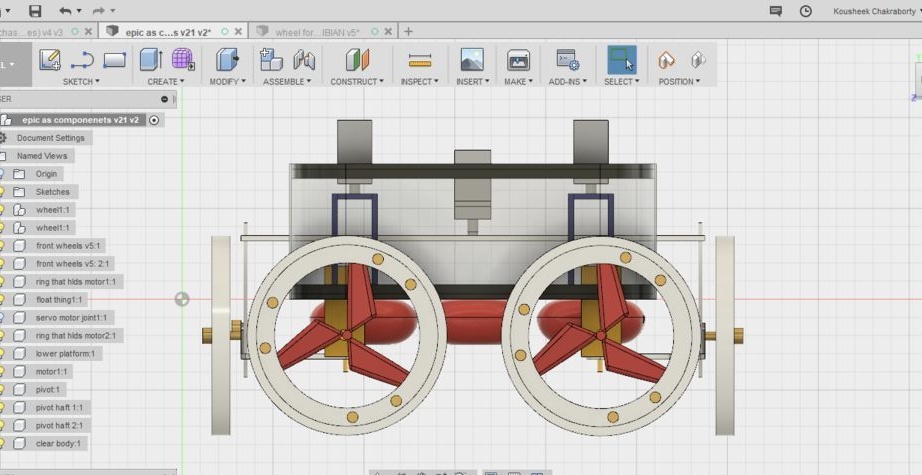
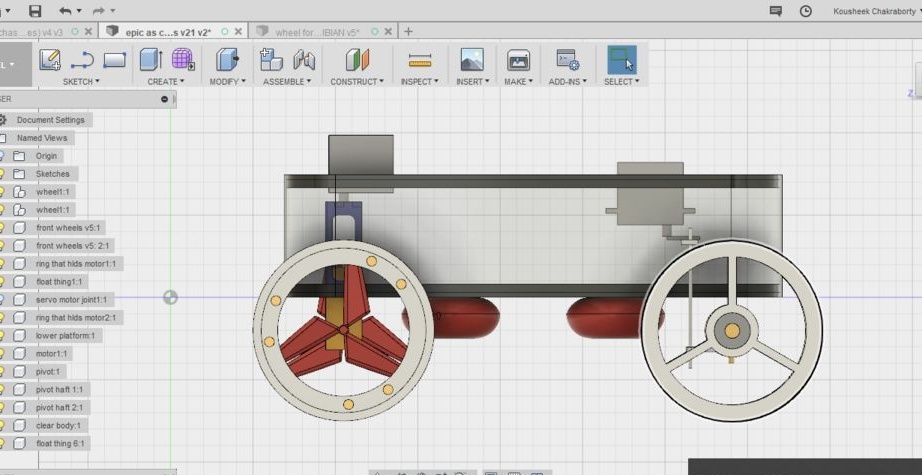
ยานพาหนะทุกพื้นที่มีสองกลไกการเปลี่ยน หนึ่งเพื่อควบคุมล้อหลังของใบพัดในน้ำและที่สองเพื่อขับบนบกควบคุมล้อหน้า มุมของการหมุนของล้อหน้าอยู่ที่ 35 องศาซึ่งทำให้คุณสามารถเลี้ยวได้อย่างเฉียบคม
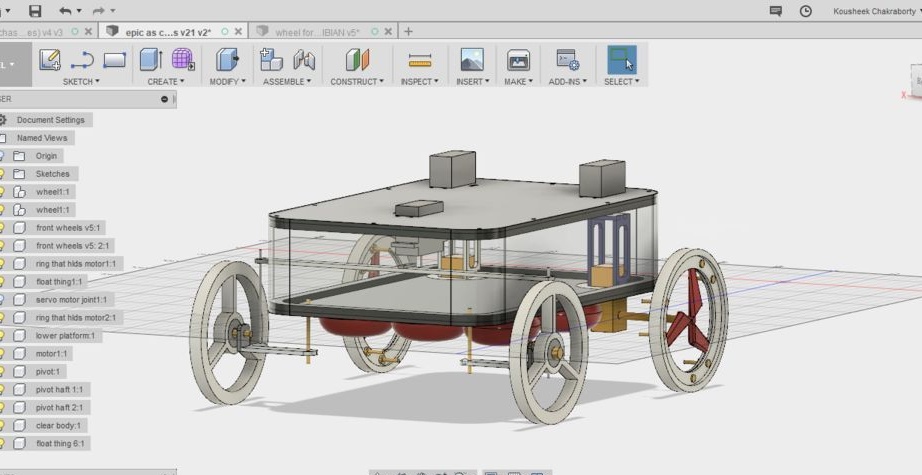
ในภาพด้านล่างคุณจะเห็นการเปลี่ยนแปลงของยานพาหนะทุกพื้นที่เมื่อเคลื่อนที่ผ่านดินและน้ำ
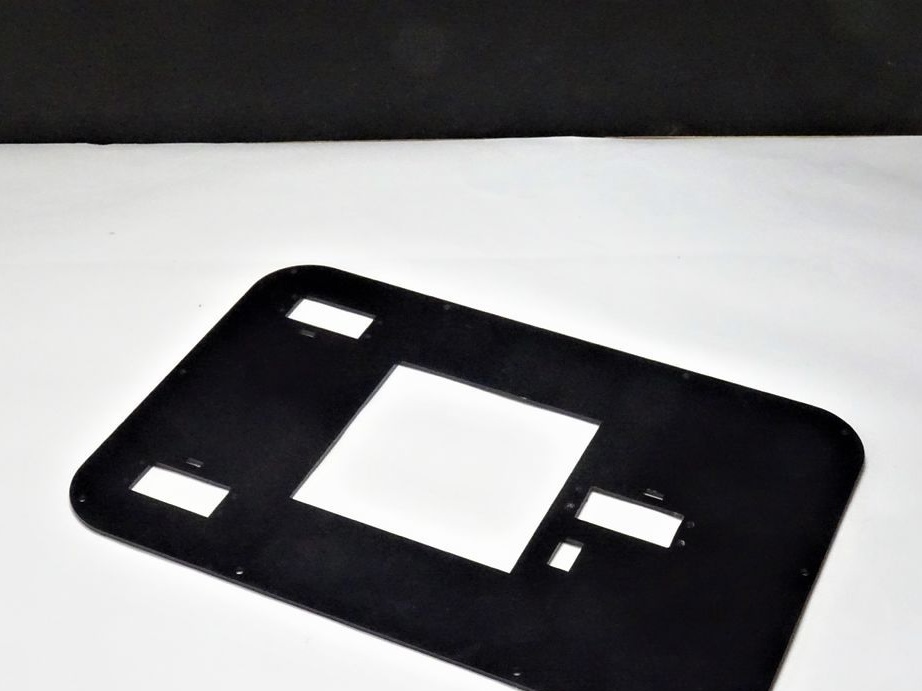
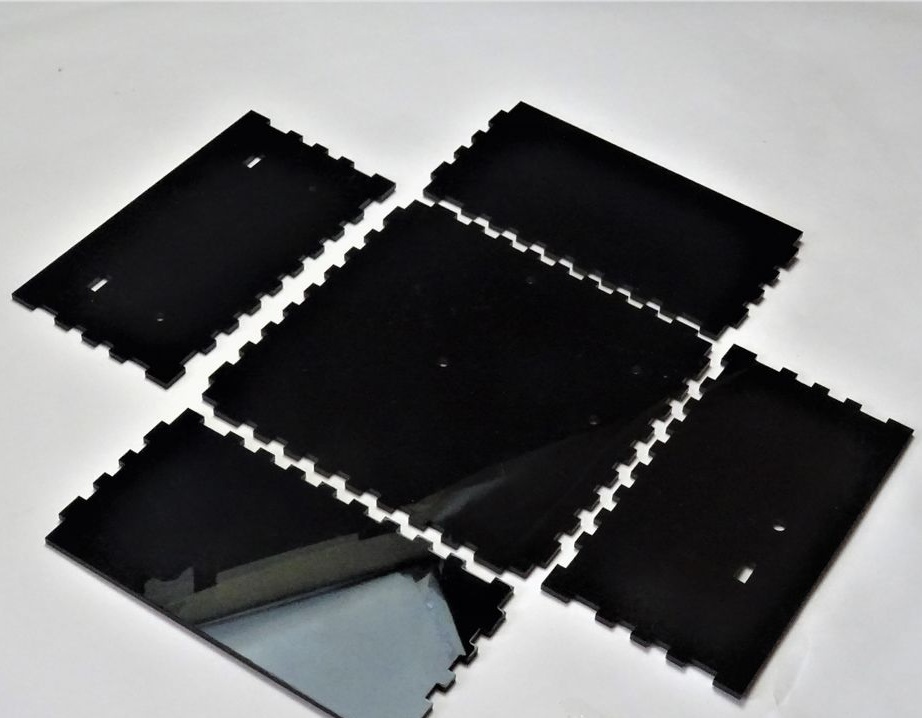
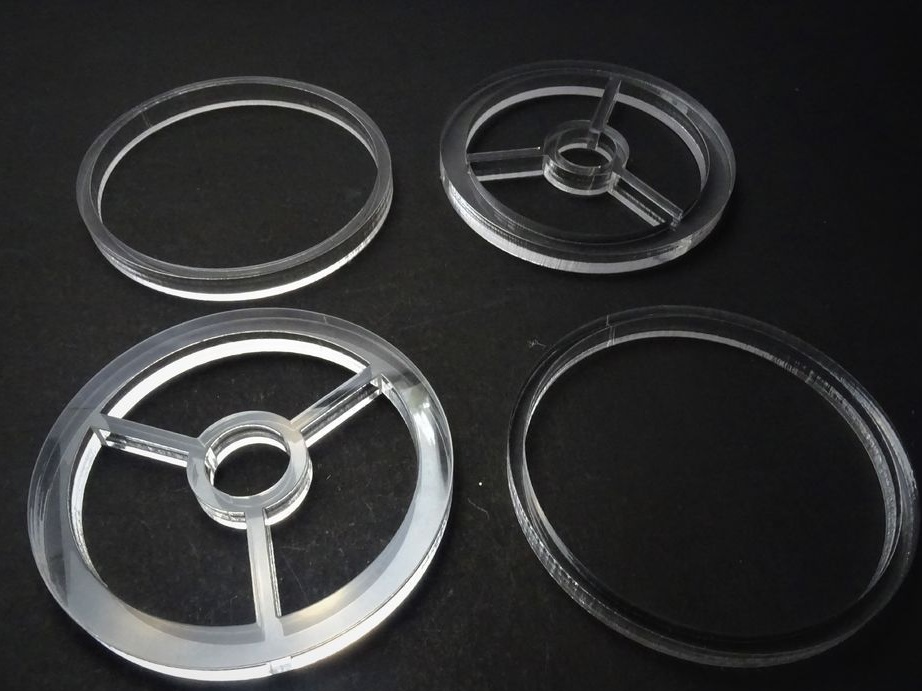
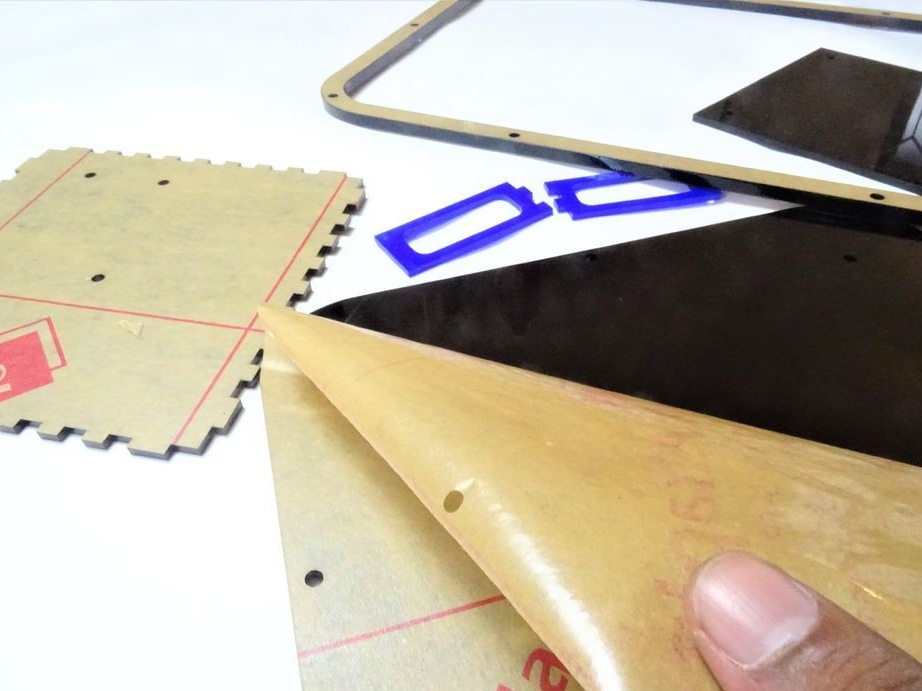
ขั้นตอนที่สอง: การตัดด้วยเลเซอร์
สำหรับยานพาหนะทุกพื้นที่ต้นแบบใช้อะคริลิคที่มีความหนาและสีต่างกัน
ชั้นเคลือบสีดำ 3 มม. x 1
ชั้นล่างสีดำ 3 มม. x 1
กรอบด้านข้างสีดำ 5 มม. x 2
ผนังด้านข้างโปร่งใส 2 มม. x 1
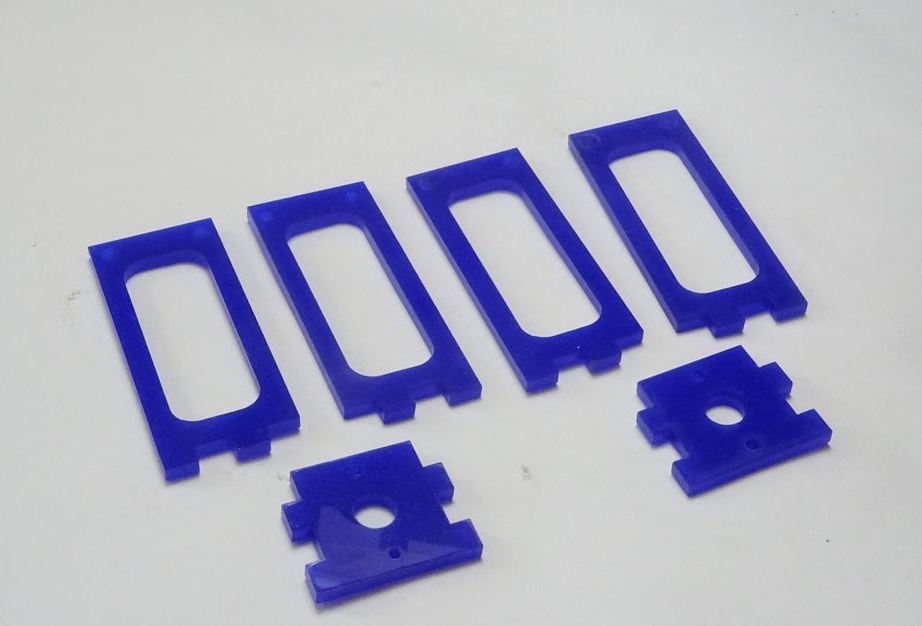
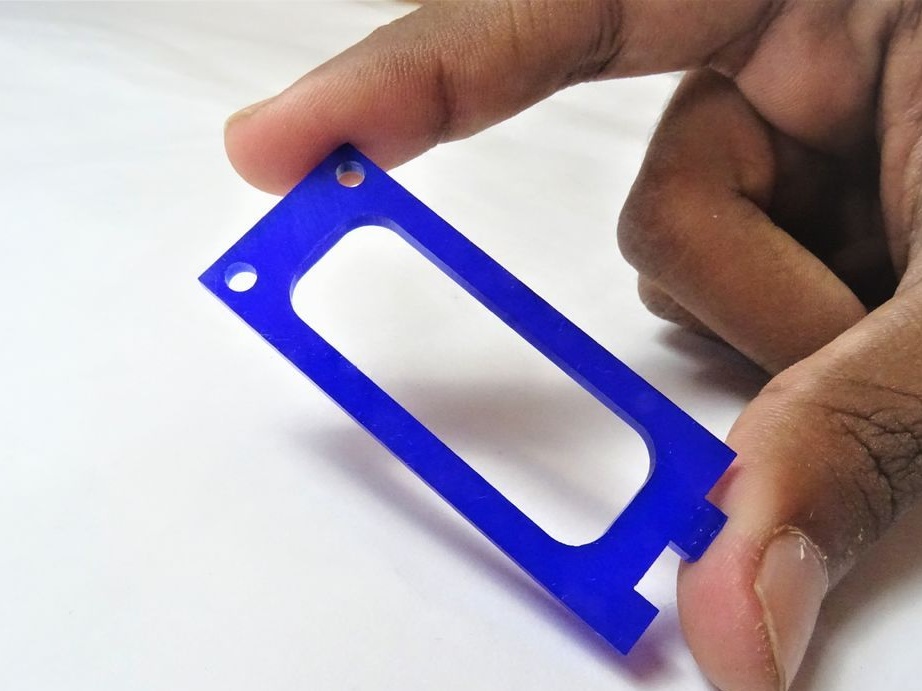
ด้านพลังงานสีน้ำเงิน 3 มม. x 4
ชิ้นส่วนสะพานสีฟ้า 3 มม. x 2
Engine DisK สีขาว 3 มม. x 2
ล้อหน้าสีขาว 10 มม. x 2
ขอบด้านใน (ล้อหลัง) สีขาว 3 มม. x 4
ขอบด้านนอก (ล้อหลัง) สีขาว 10 มม. x 2
พวงมาลัยสีขาว 3 มม. x 1
ตู้ลิ้นชักสีดำ 3 มม. x 1
ฝาปิดช่องสีดำ 3 มม. x 1
เพลามอเตอร์ด้านหลังสีขาว 3 มม. x 2
แผงด้านหน้าสีขาว 5 มม. x 2



คุณสามารถดาวน์โหลดไฟล์สำหรับ CNC ได้จากลิงค์
อะไหล่เลเซอร์ตัดโรเวอร์
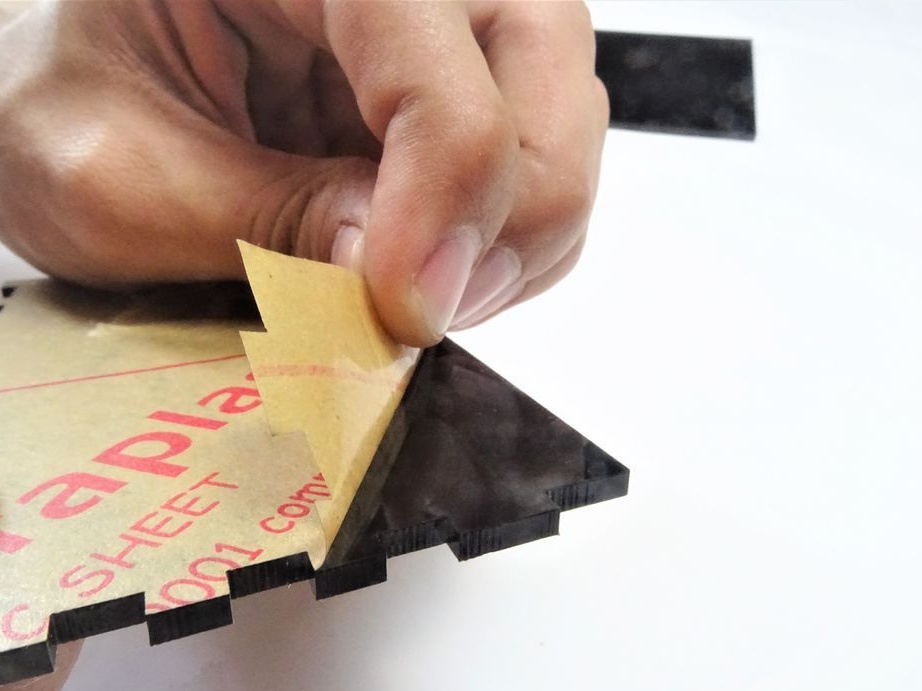
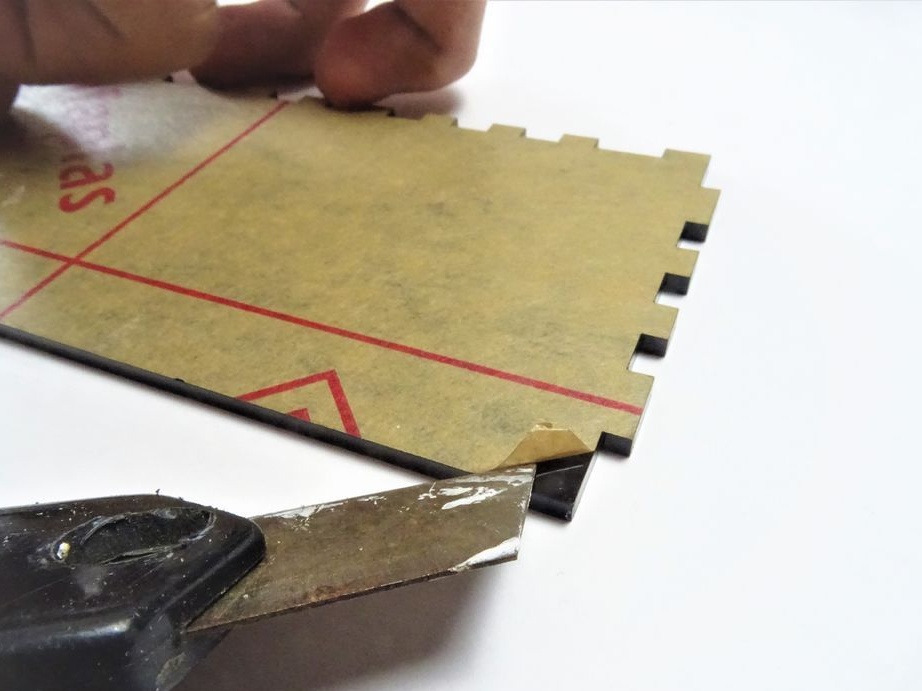
หลังจากผลิตชิ้นส่วนแล้วให้ถอดชั้นป้องกันออกจากชิ้นส่วนเหล่านั้น
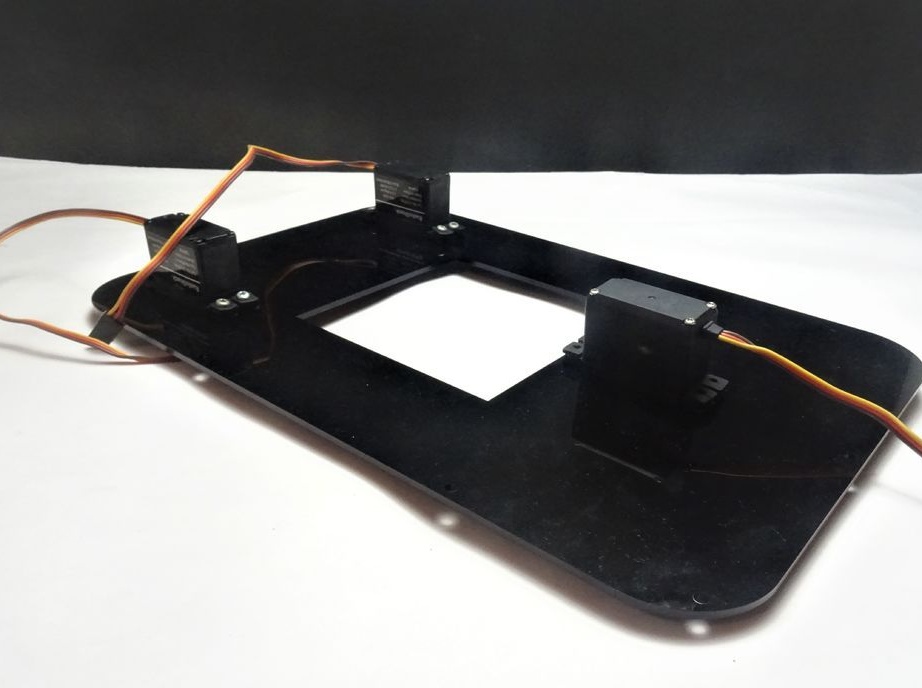
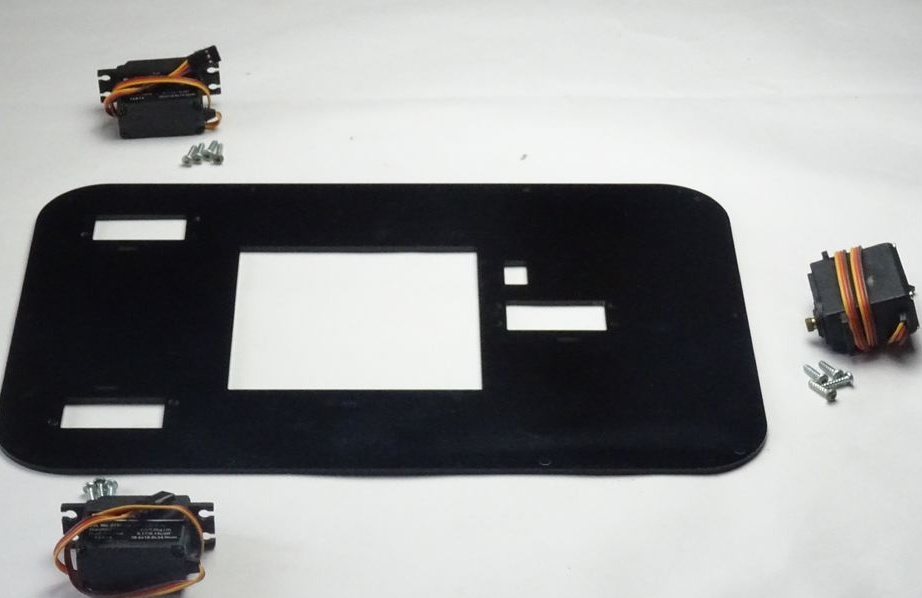
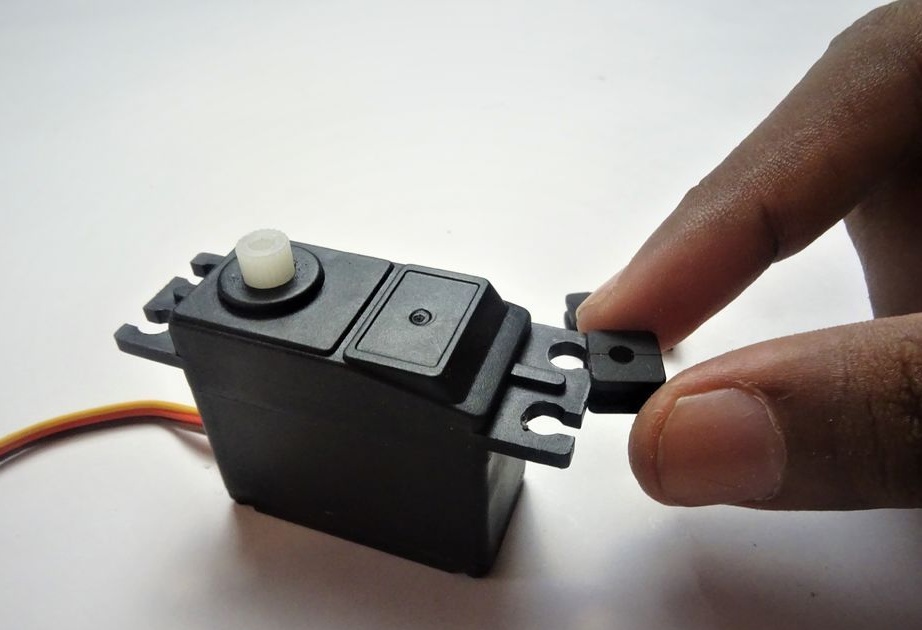
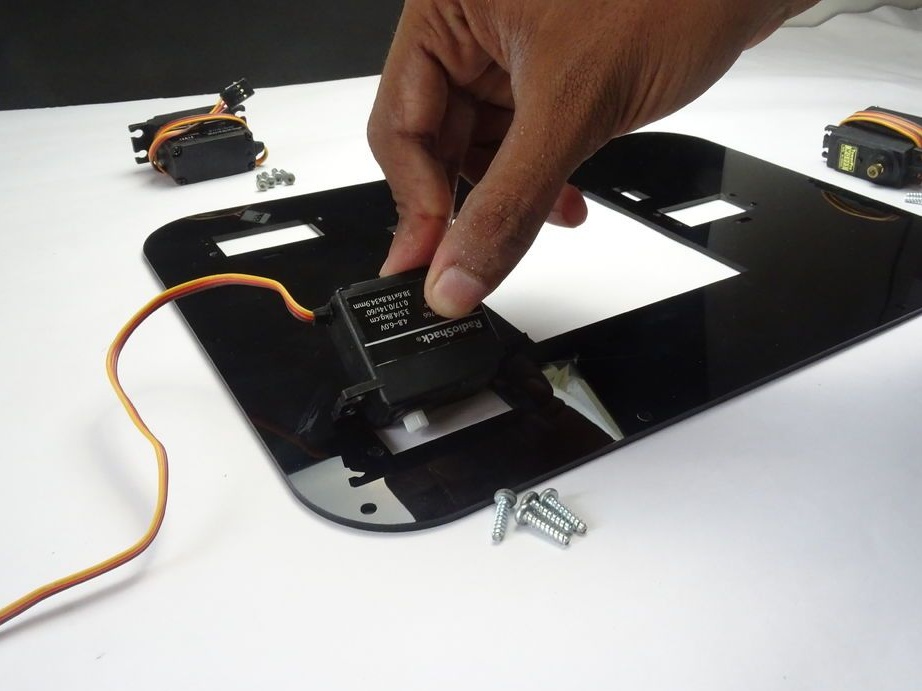
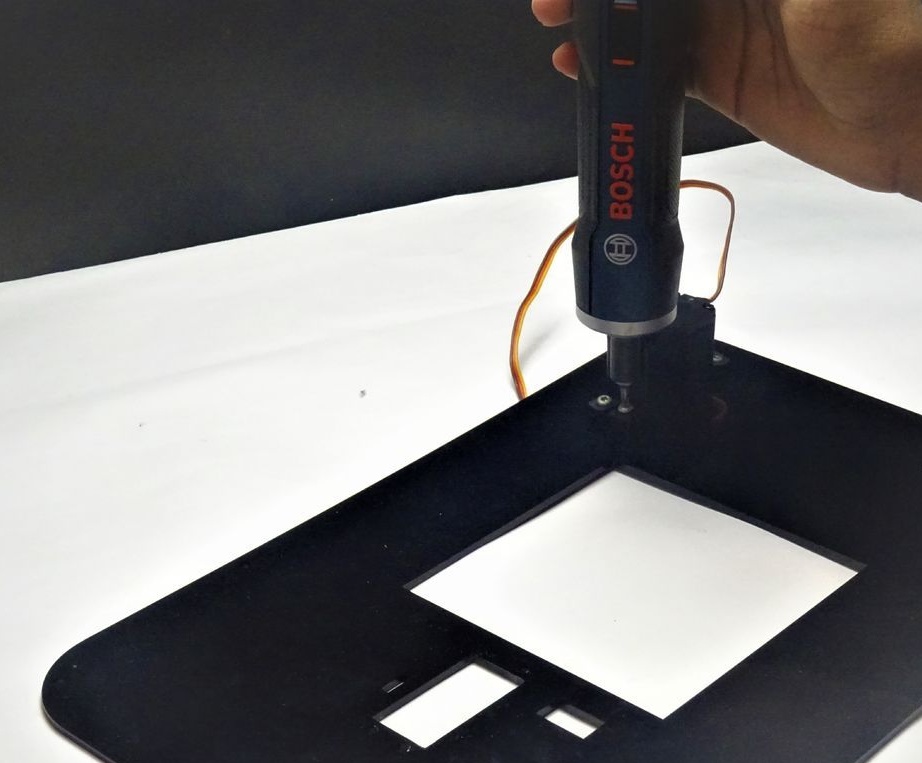
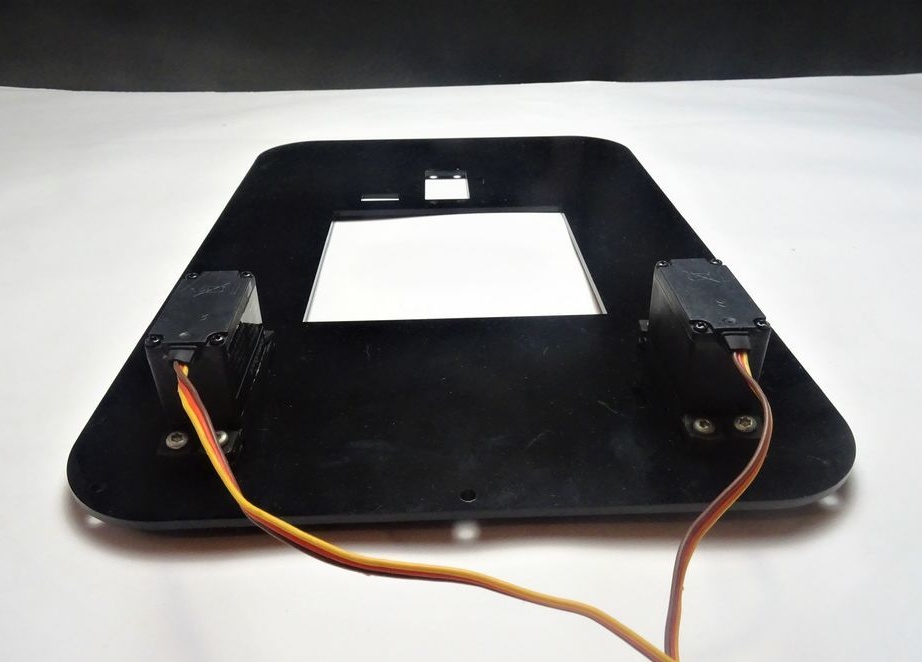
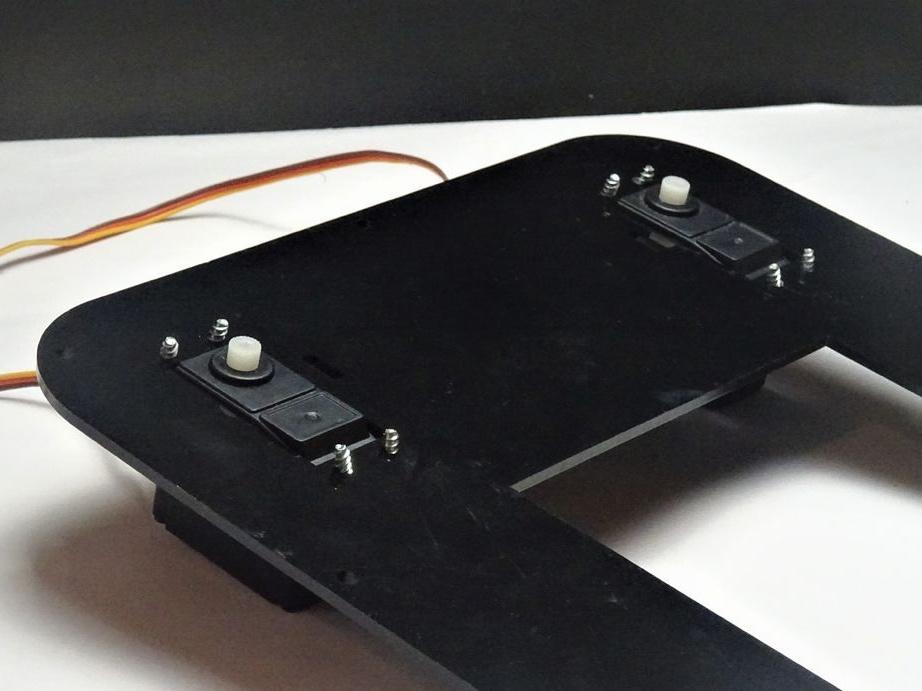
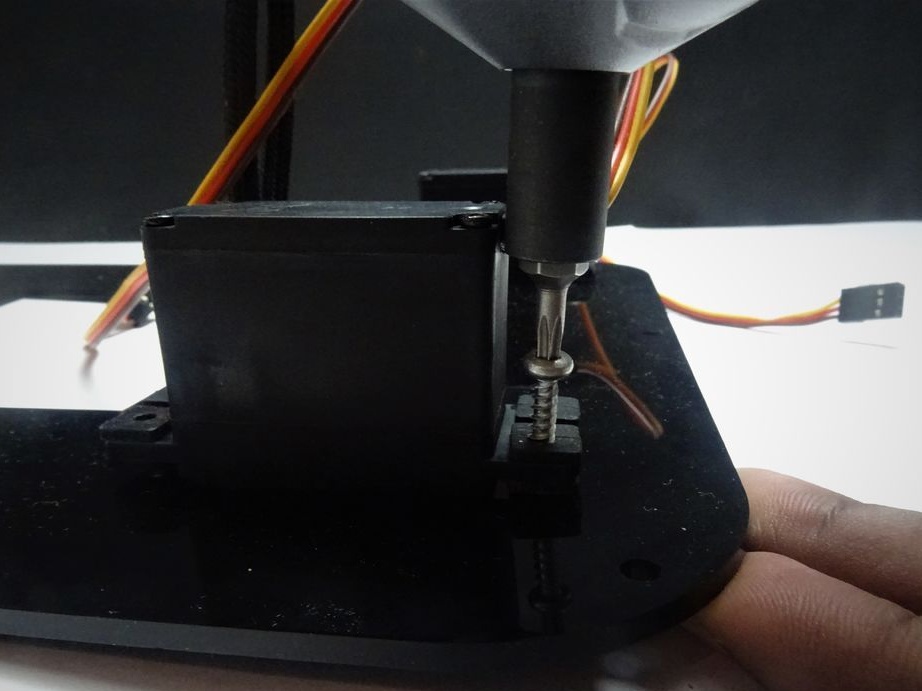
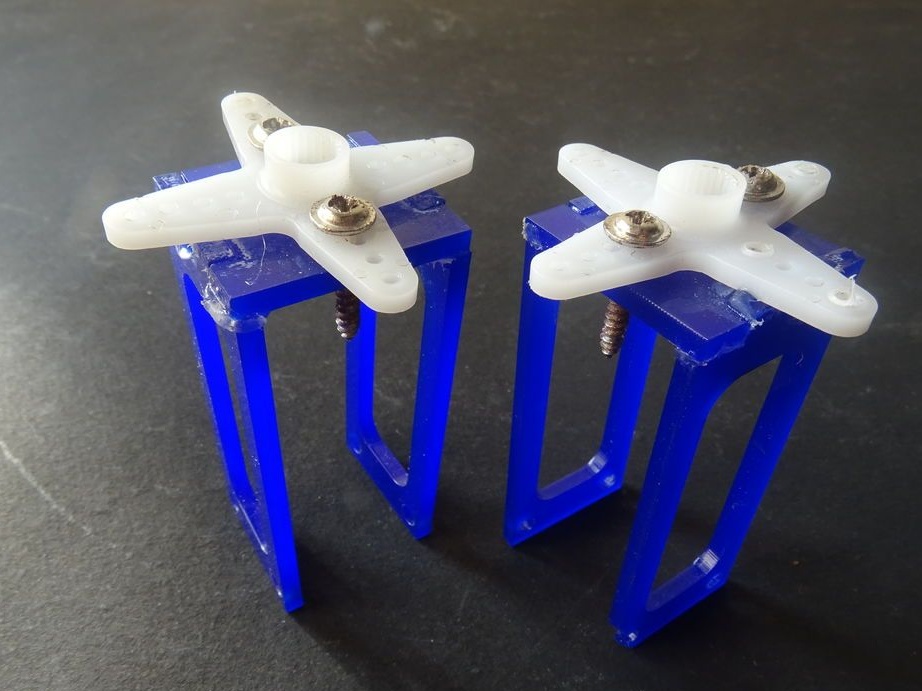
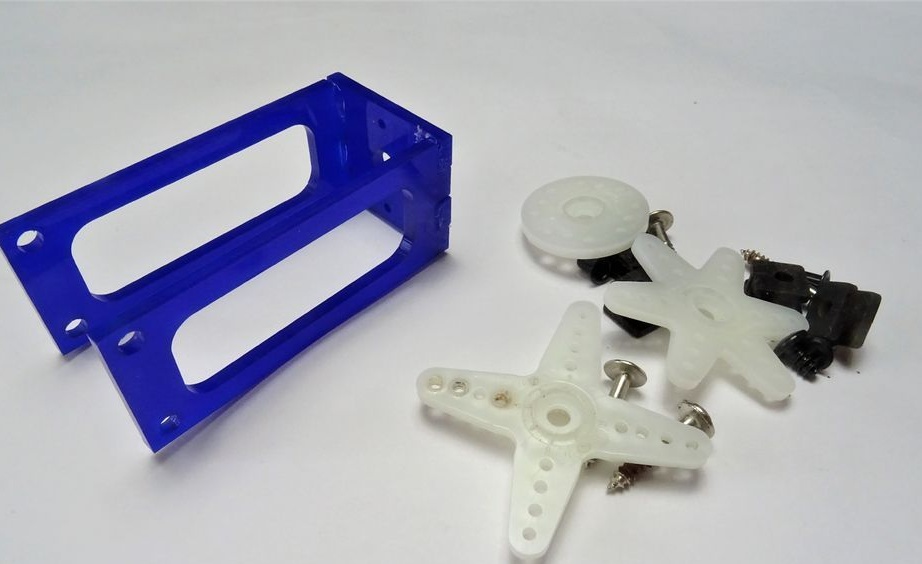
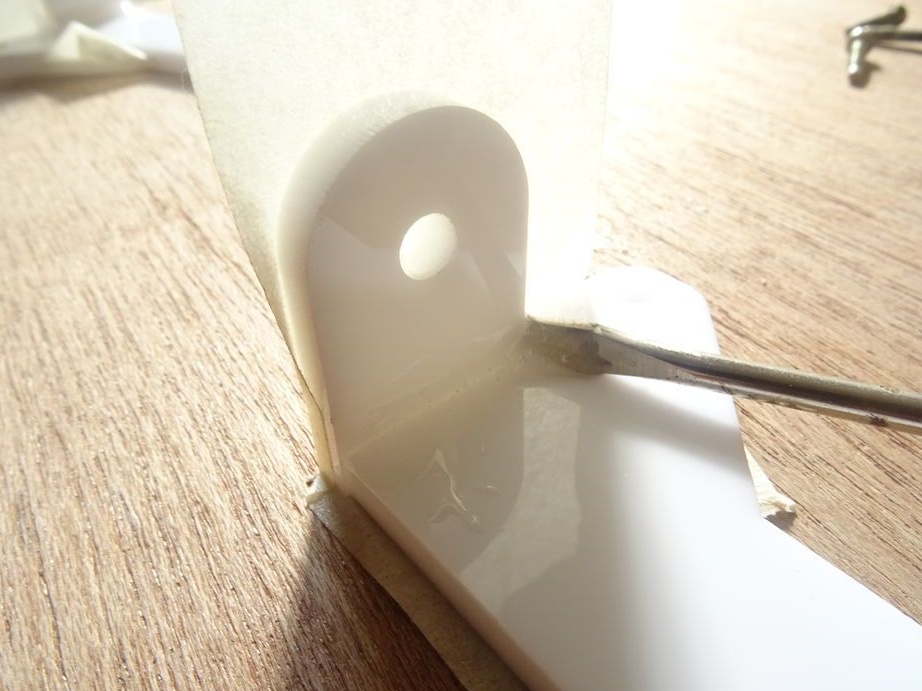
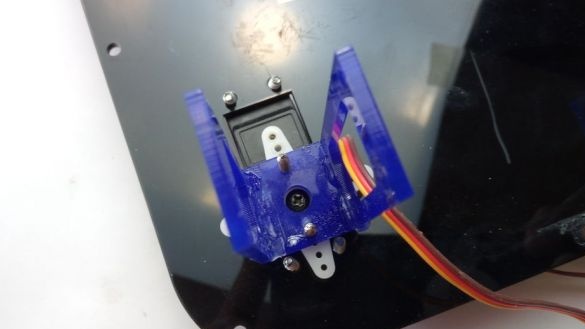
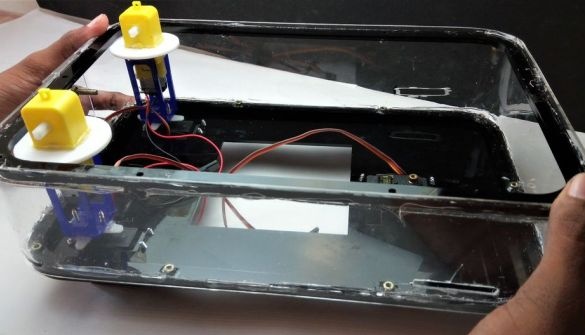
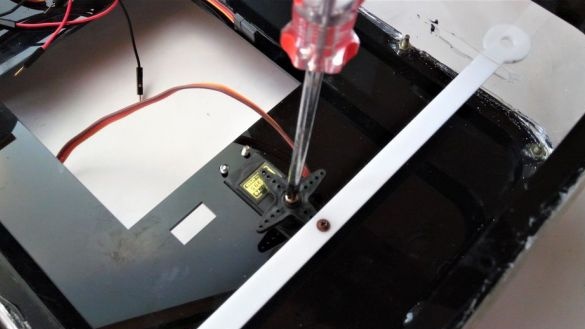
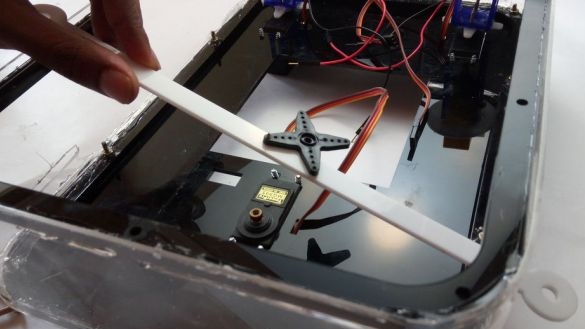
ขั้นตอนที่สาม: ติดตั้ง Servo Motors
เซอร์โวมอเตอร์ทั้งสามตัวถูกยึดเข้ากับแท่น สองถึงด้านหลังและอีกหนึ่งทางด้านหน้า

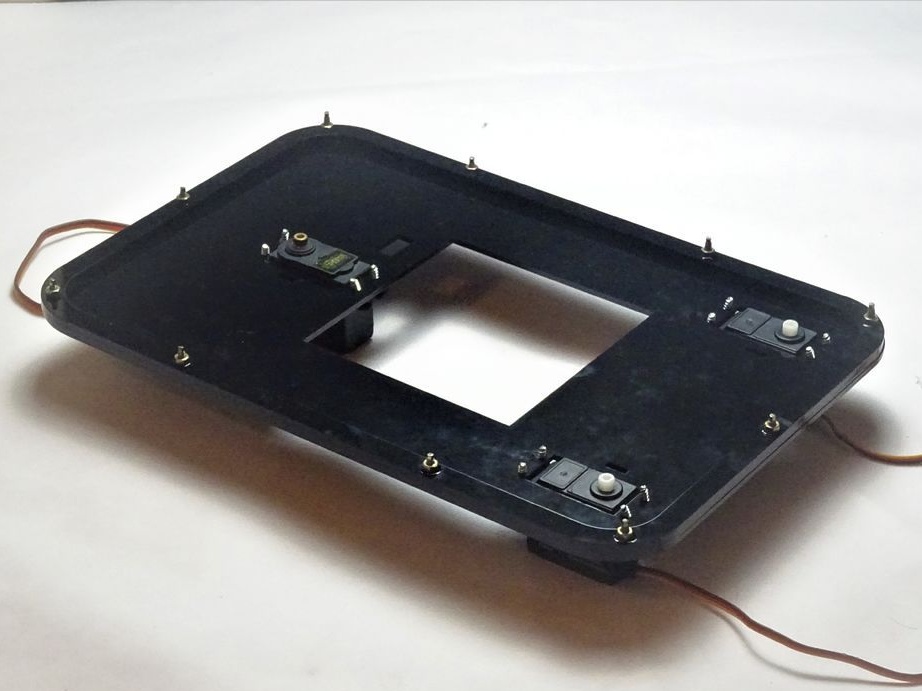
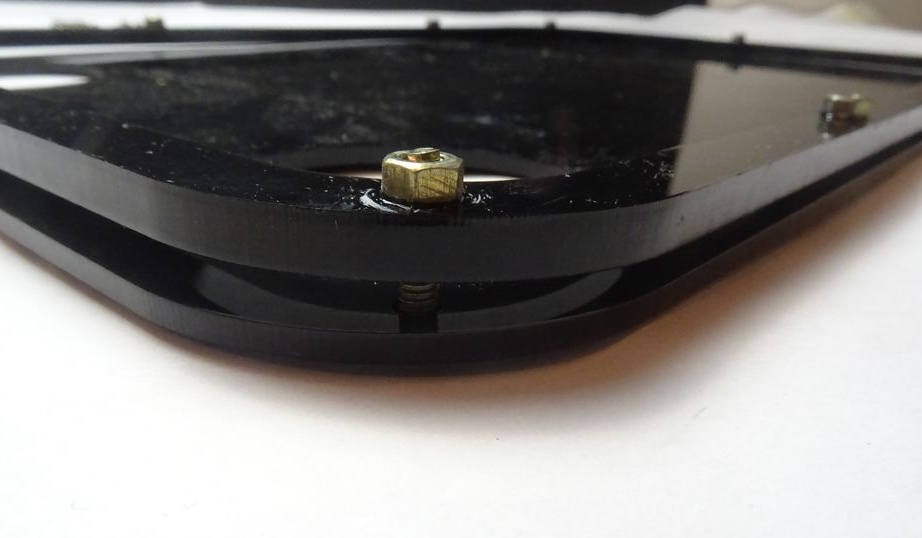
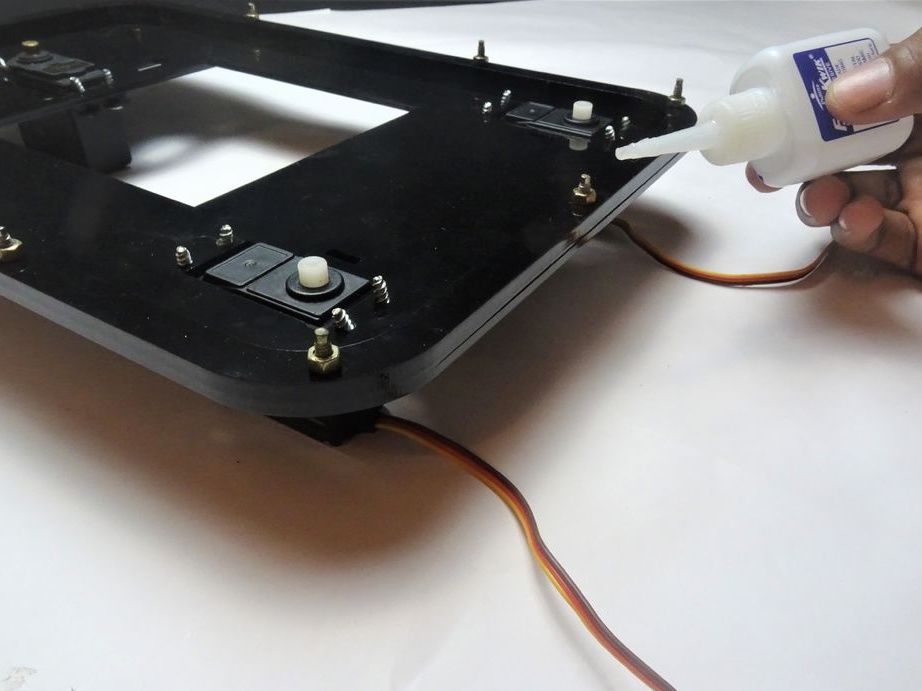
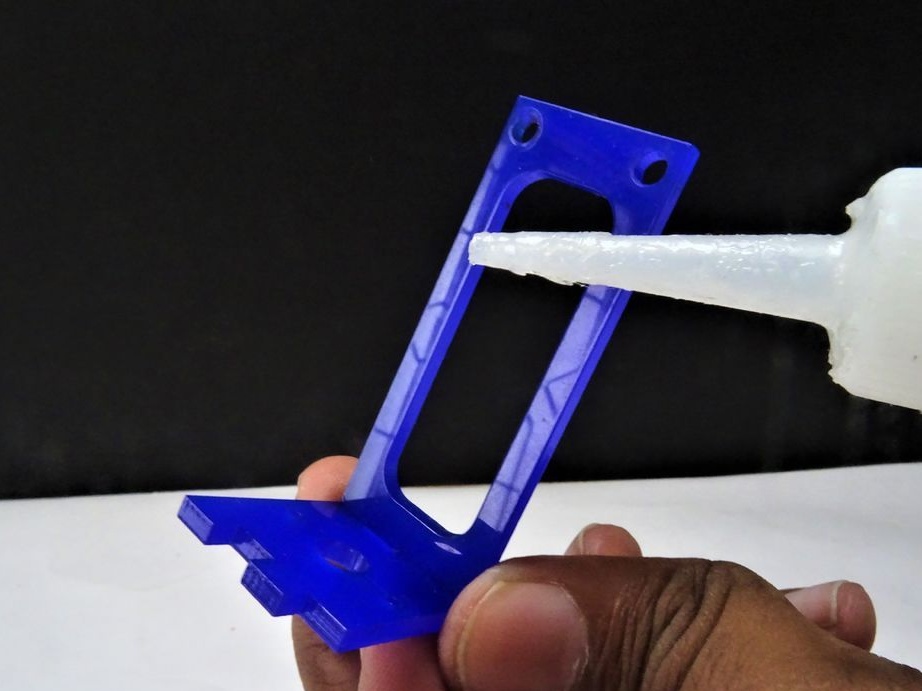
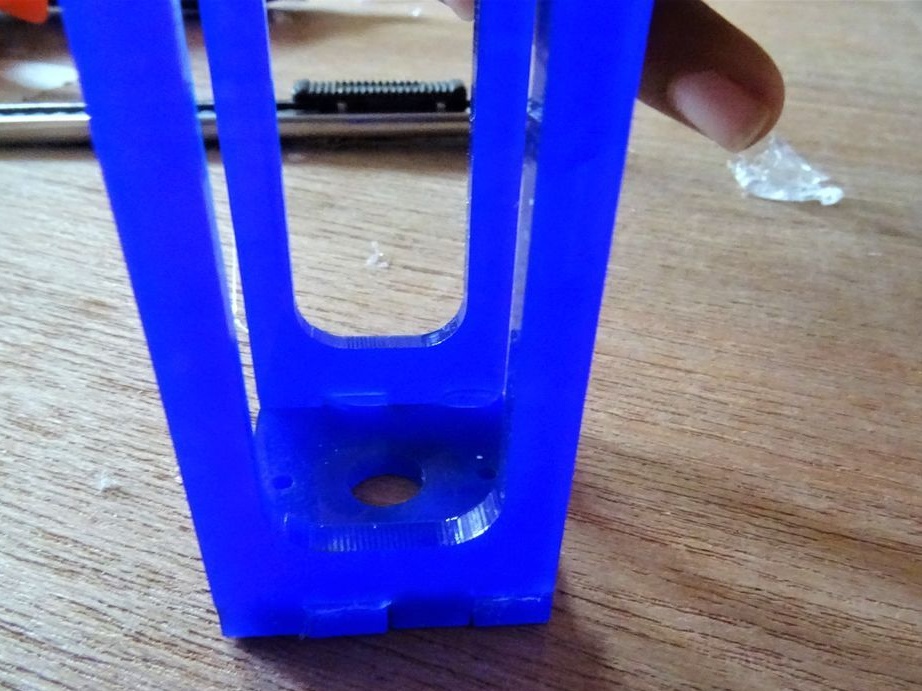
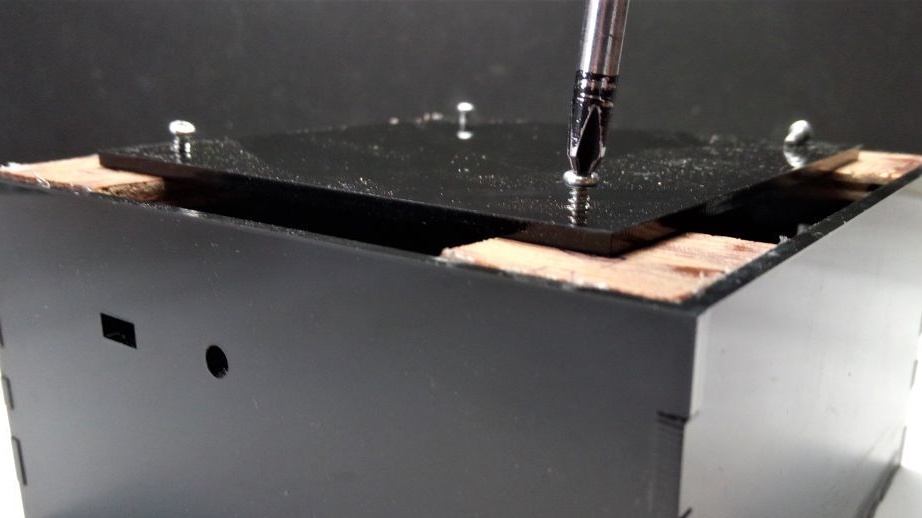
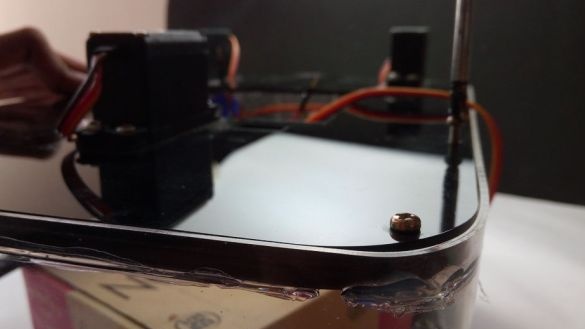
ขั้นตอนที่สี่: ถั่ว
สำหรับการเข้าถึงกลไกนั้นชิ้นส่วนด้านบนและด้านล่างจะถูกยึดเข้าด้วยกัน กาวถั่วบน superglue ไปที่เฟรมแล้วตอกย้ำมันด้วยอีพ๊อกซี่


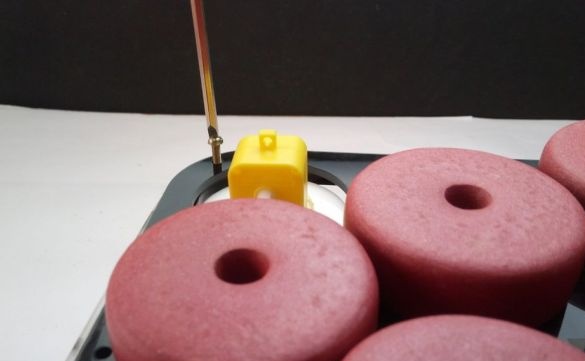
ขั้นตอนที่ห้า: ลอย
กาวลอย



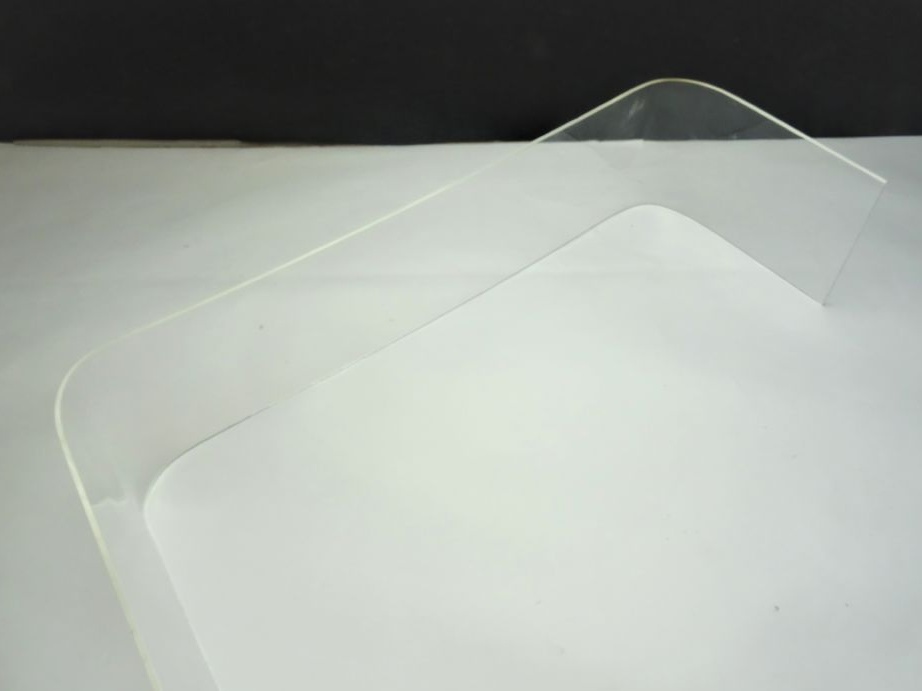
ขั้นตอนที่หก: การสร้างคริลิค
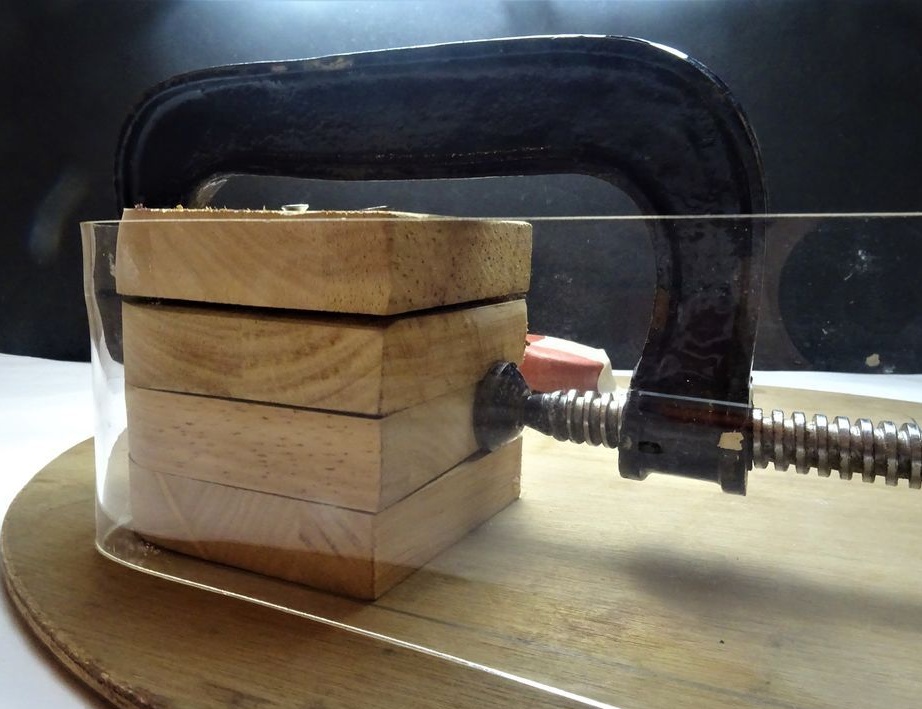
ในการดัดโค้งอะคริลิคช่างทำแม่แบบจากไม้



เขาหนีบชิ้นส่วนด้วยที่หนีบและให้ความร้อนด้วยเครื่องเป่าผมทำให้ชิ้นส่วนมีรูปร่างที่ต้องการ





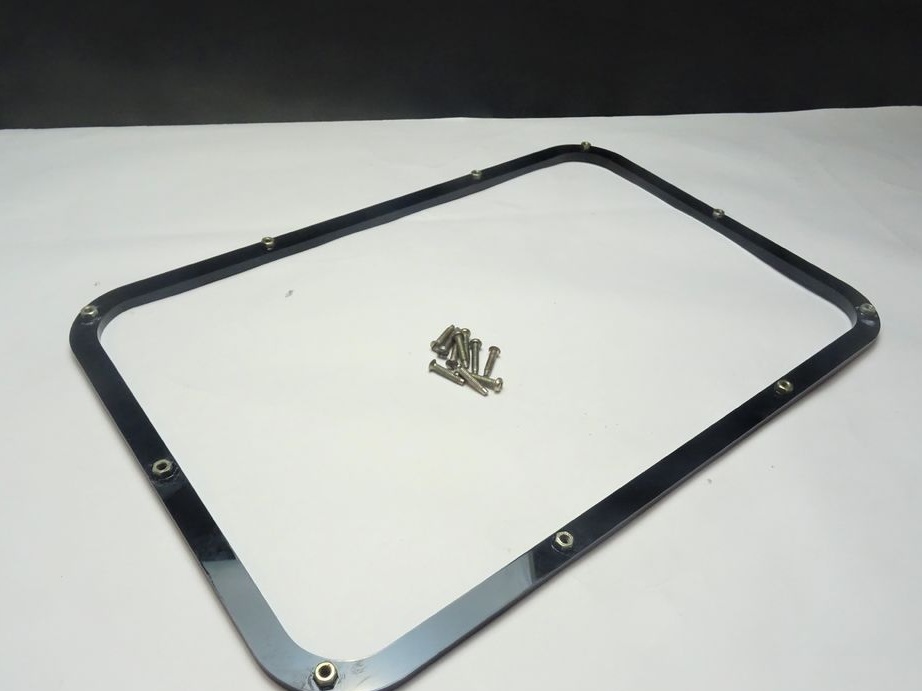
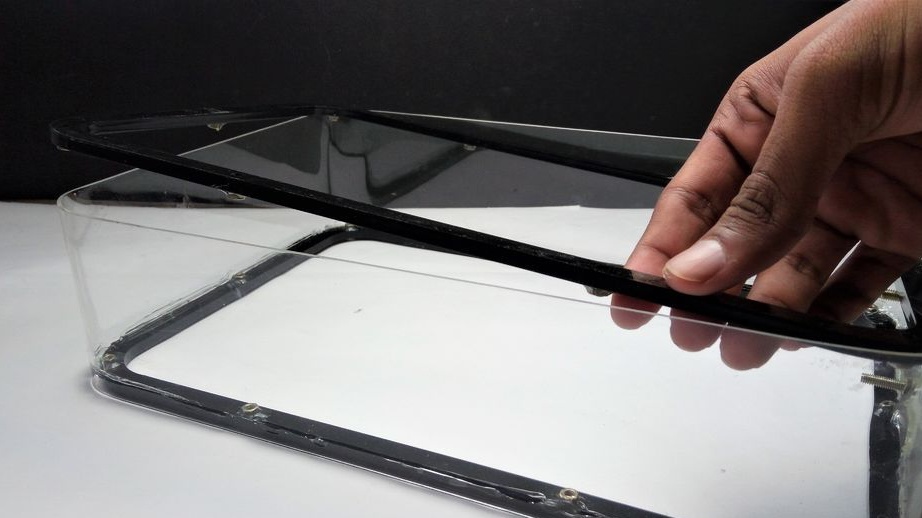
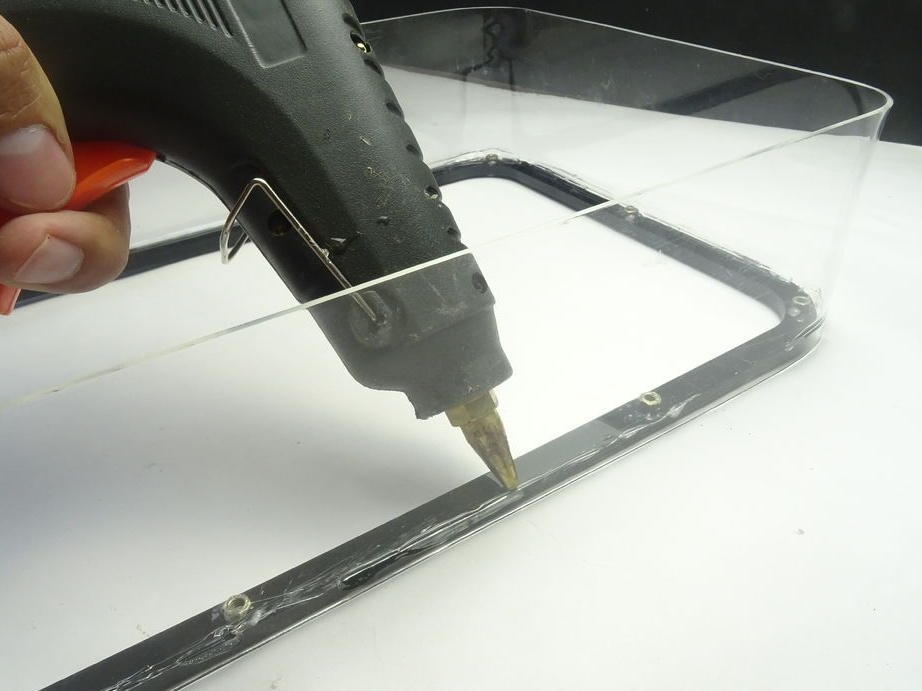
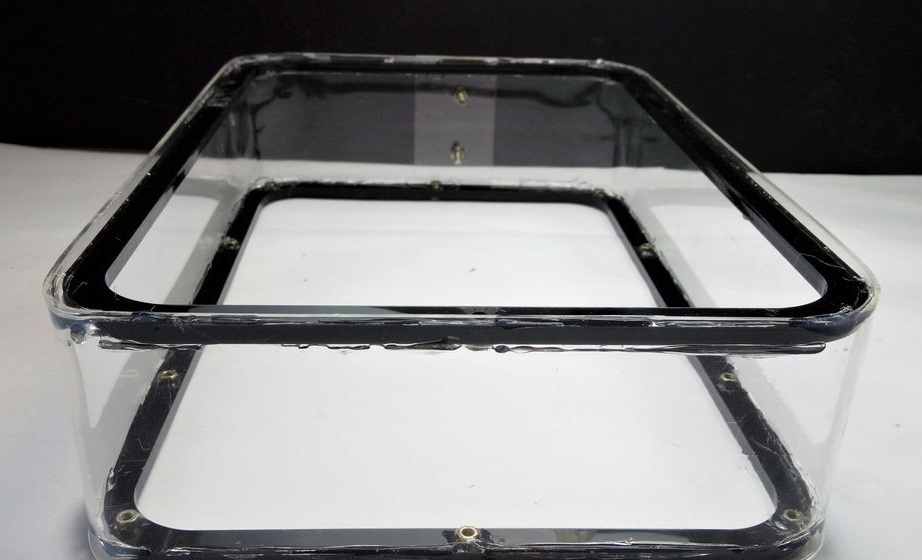
ขั้นตอนที่เจ็ด: กรอบ
กาวเฟรมด้านบนและล่างให้กับร่างกายโปร่งใส ตะเข็บจะถูกปิดผนึกอย่างระมัดระวังด้วยกาวร้อน







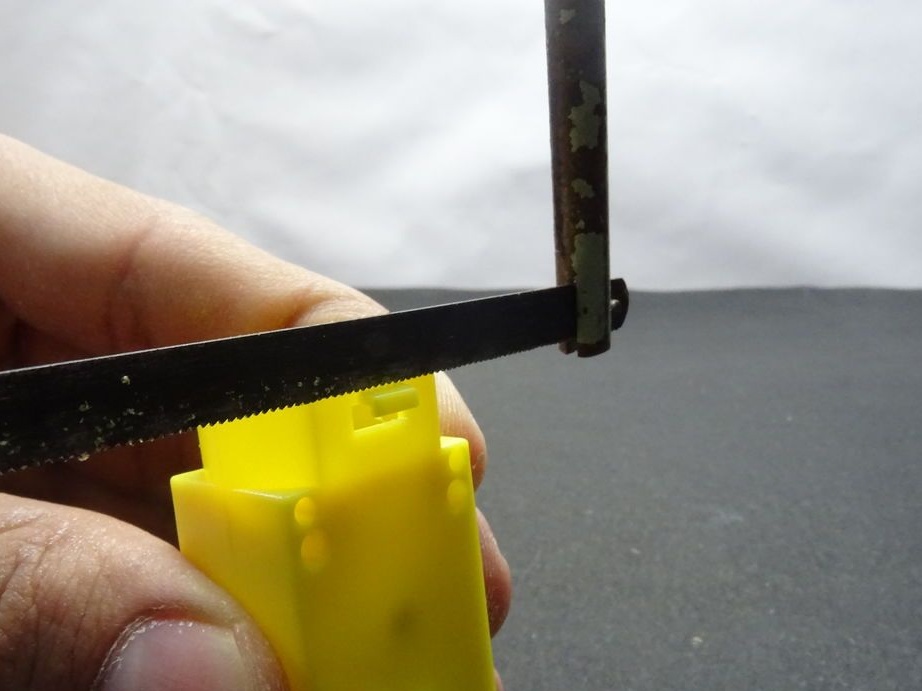
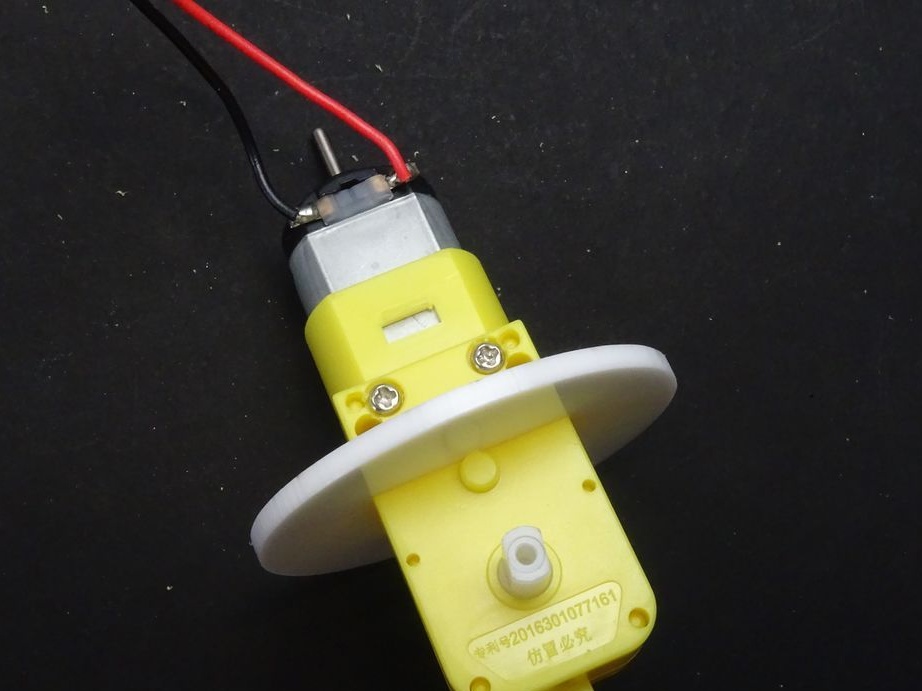
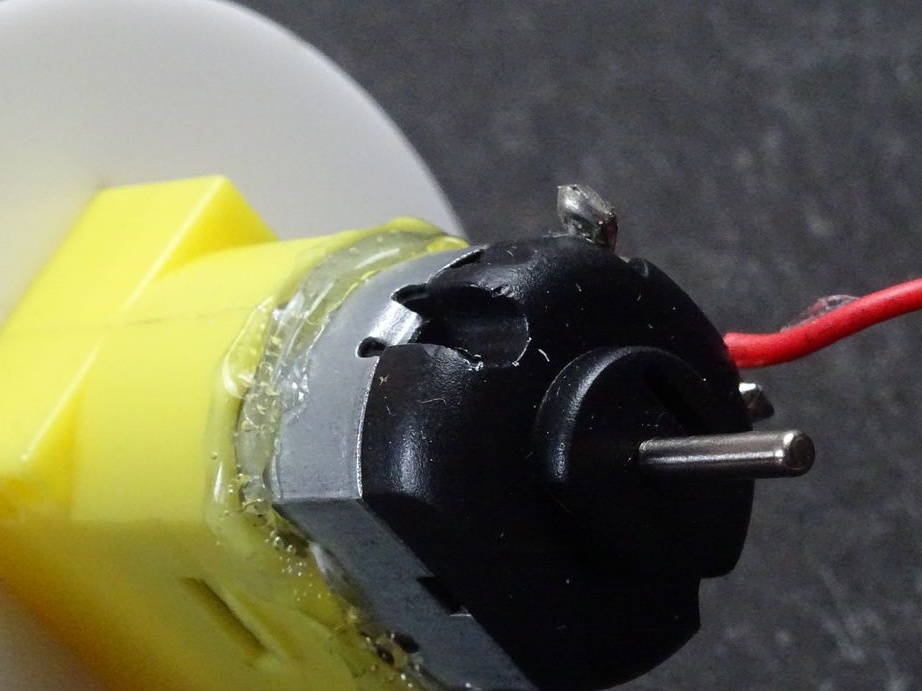
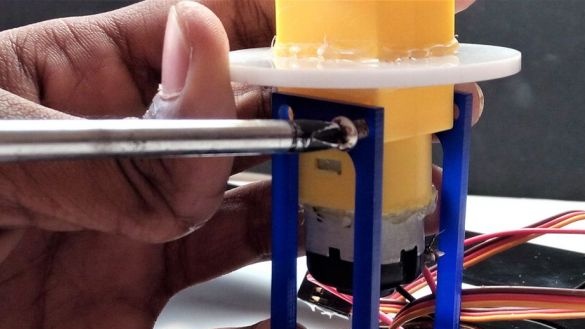
ขั้นตอนที่แปด: ปรับแต่งเครื่องยนต์
ตอนนี้คุณต้องประมวลผลปลอกเครื่องยนต์เพื่อติดตั้งชิ้นส่วนบน
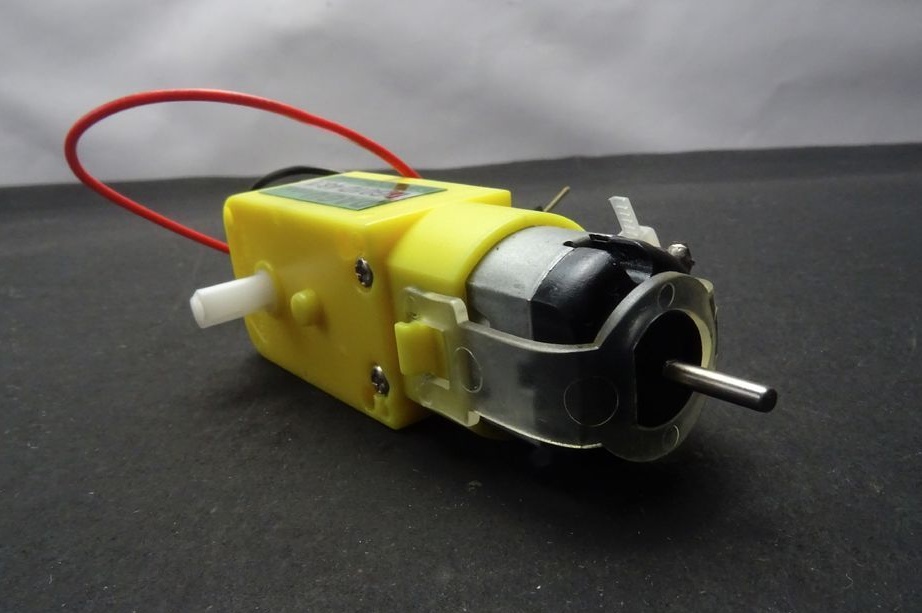

ตัดส่วนที่ยื่นออกมาทั้งหมดออกจากร่างกายจนถึงสติกเกอร์
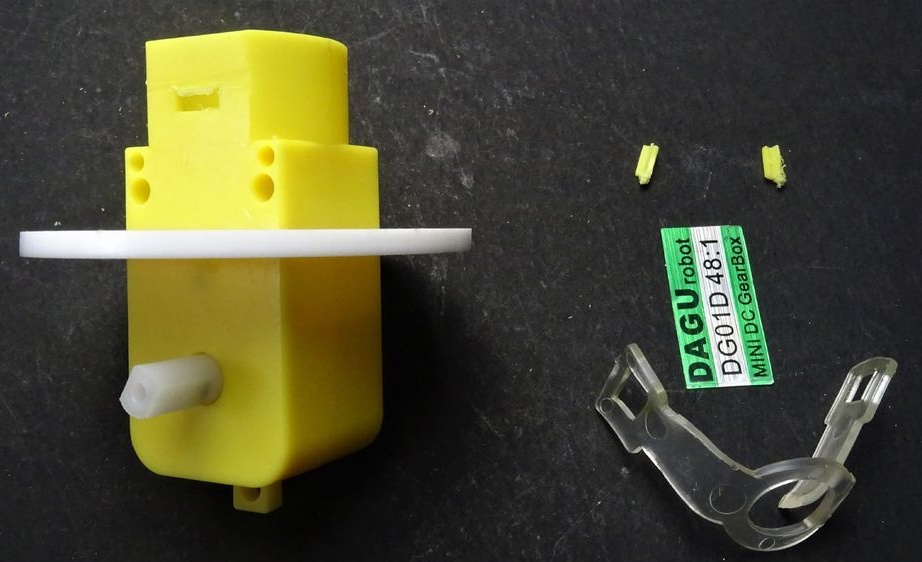

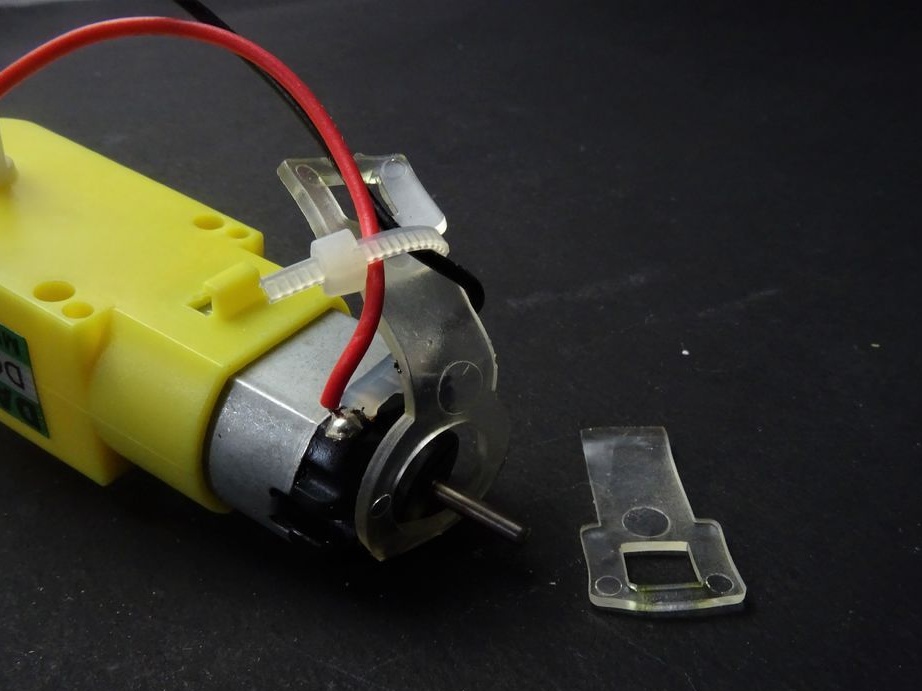


ติดตั้งชิ้นส่วนในร่างกายและติดกาว เนื่องจากจำเป็นต้องตัดการยึดเครื่องยนต์ (แลตช์) เครื่องยนต์จึงแก้ไขด้วยกาว

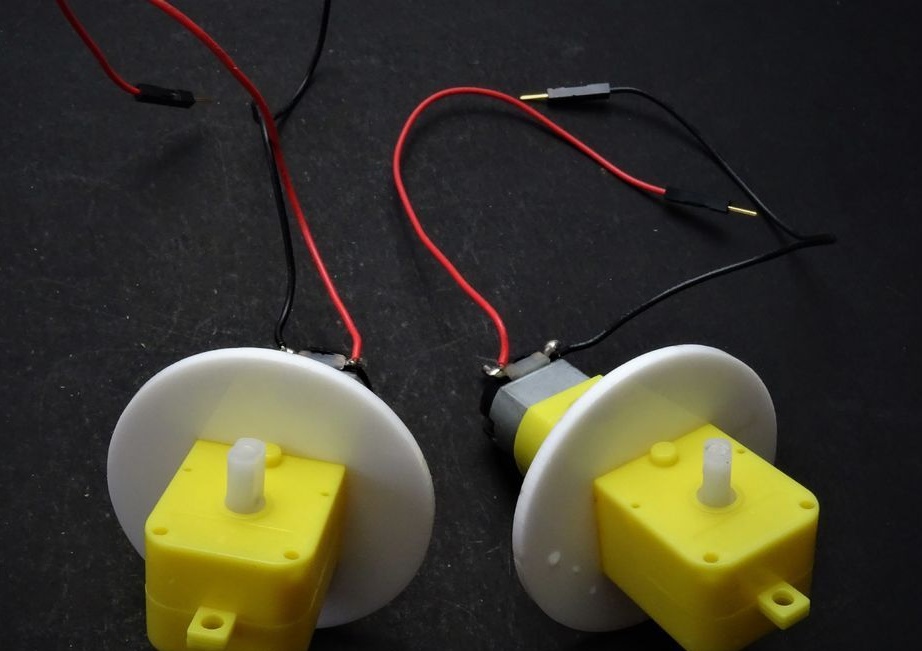

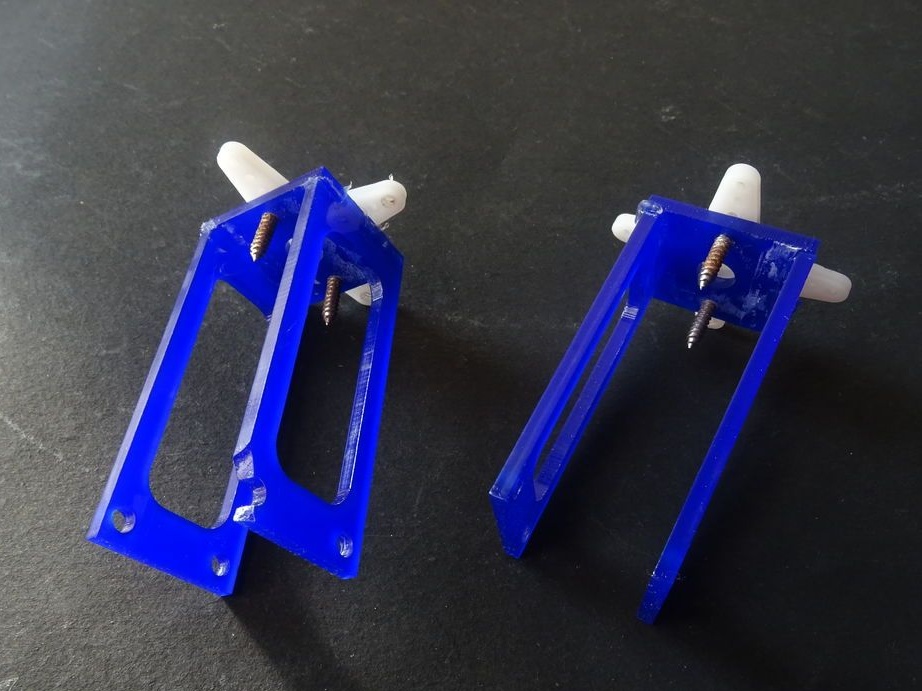
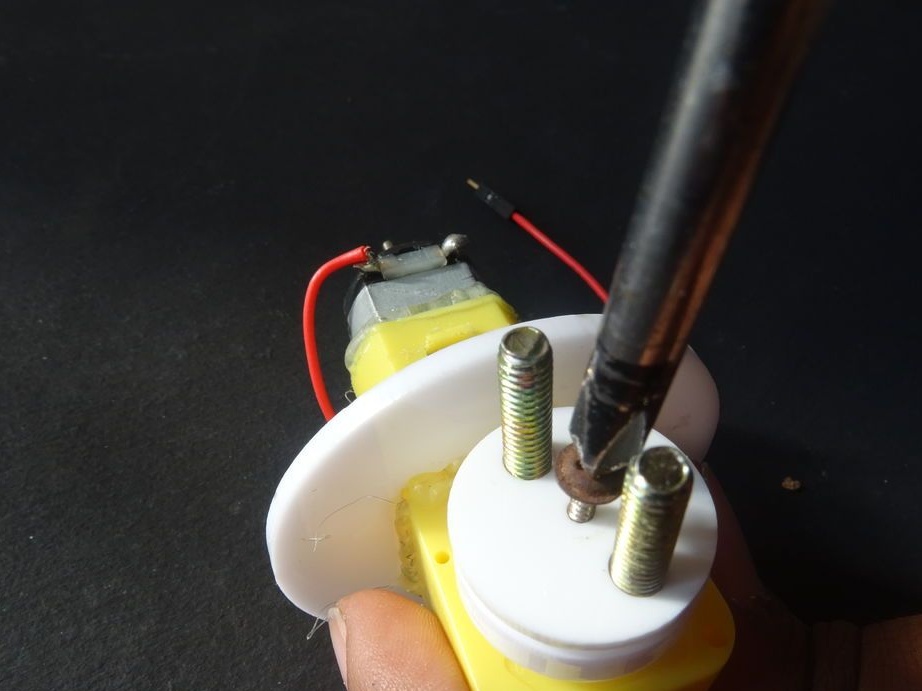
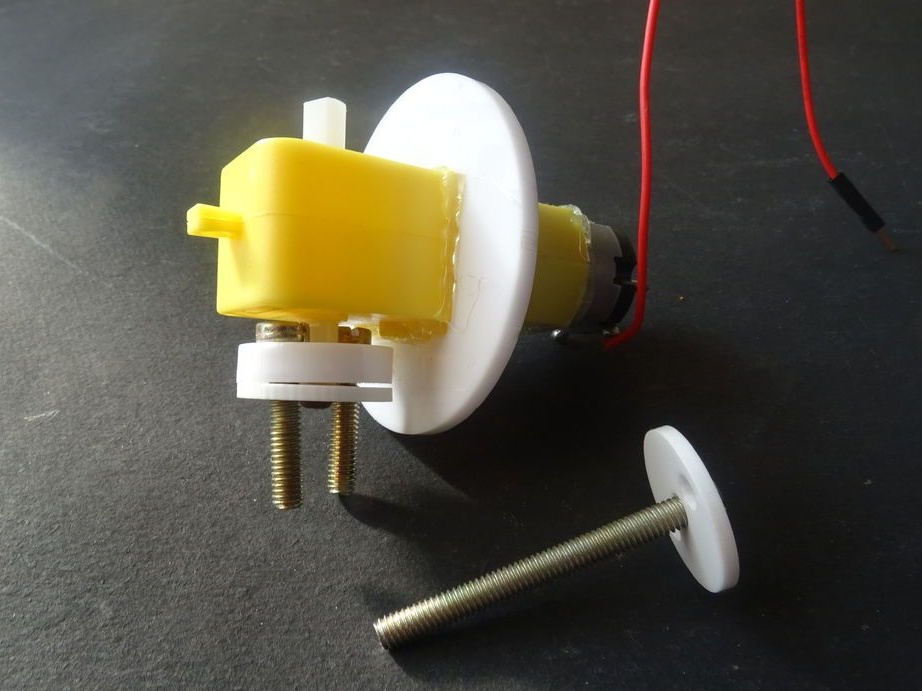
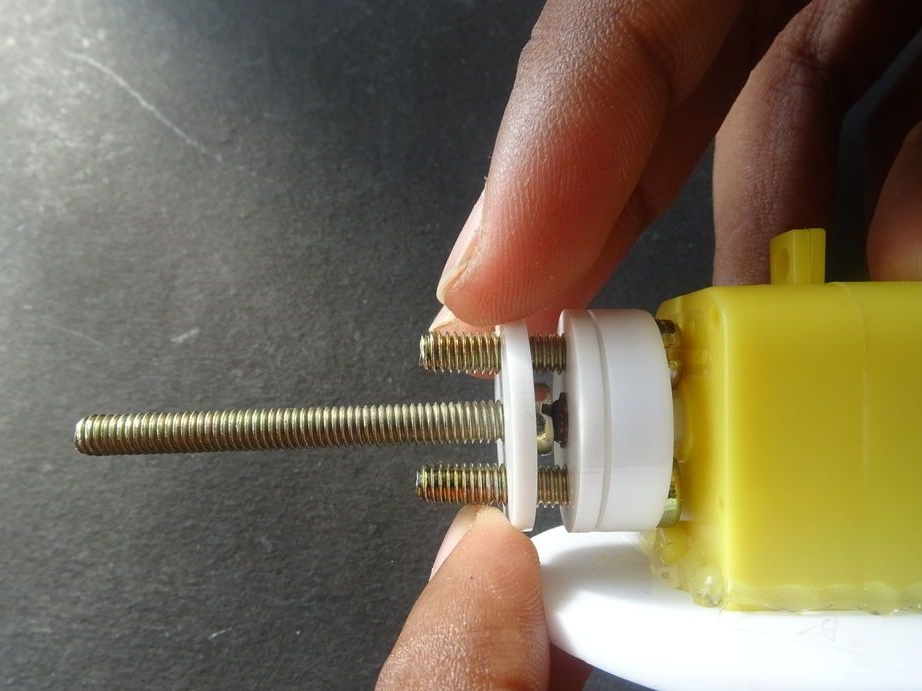
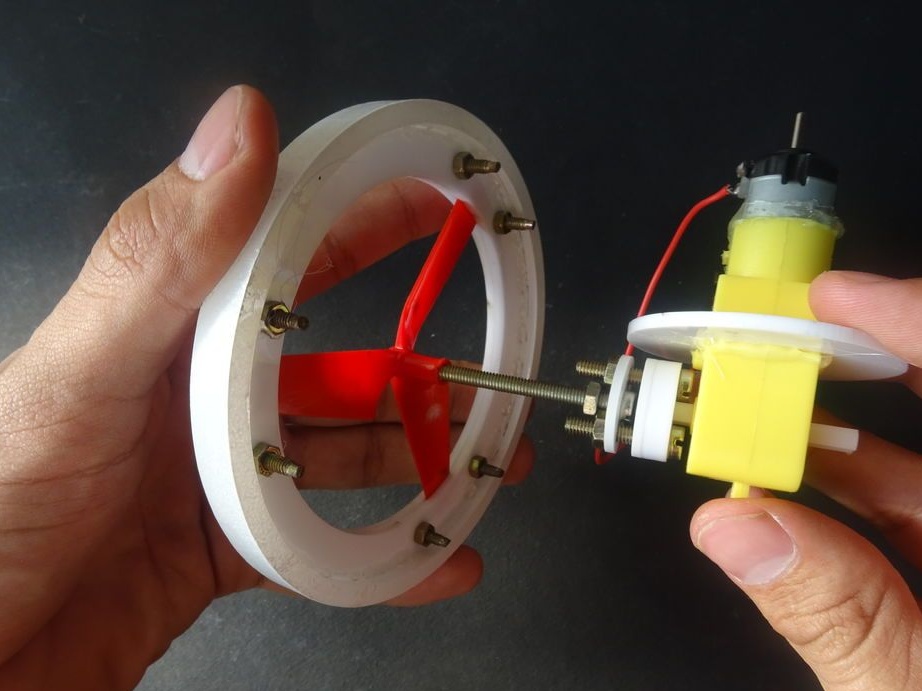
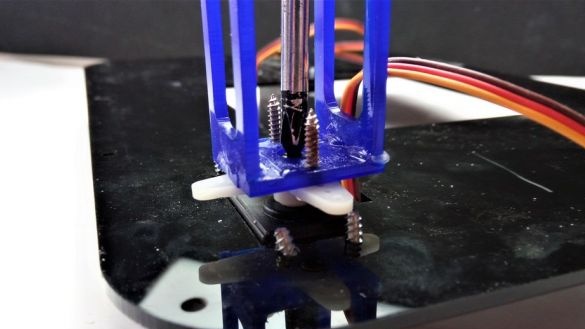
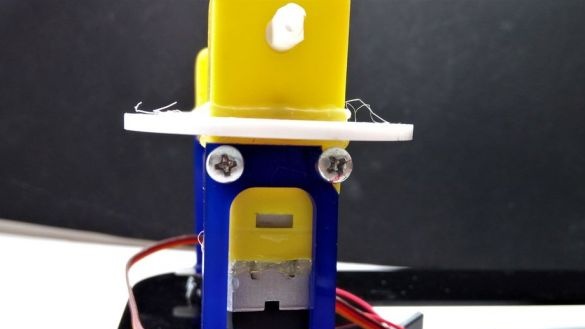
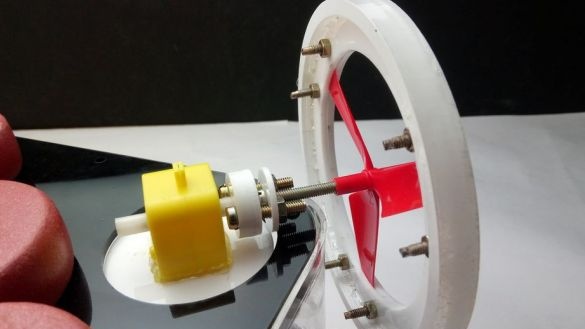
ขั้นตอนที่เก้า: กลไกการหมุน
ประกอบตัวเรือนแบบหมุน เครื่องยนต์จะถูกติดตั้งภายในและจะเชื่อมต่อกับไดรฟ์เซอร์โว
กรณีที่ติดกาว

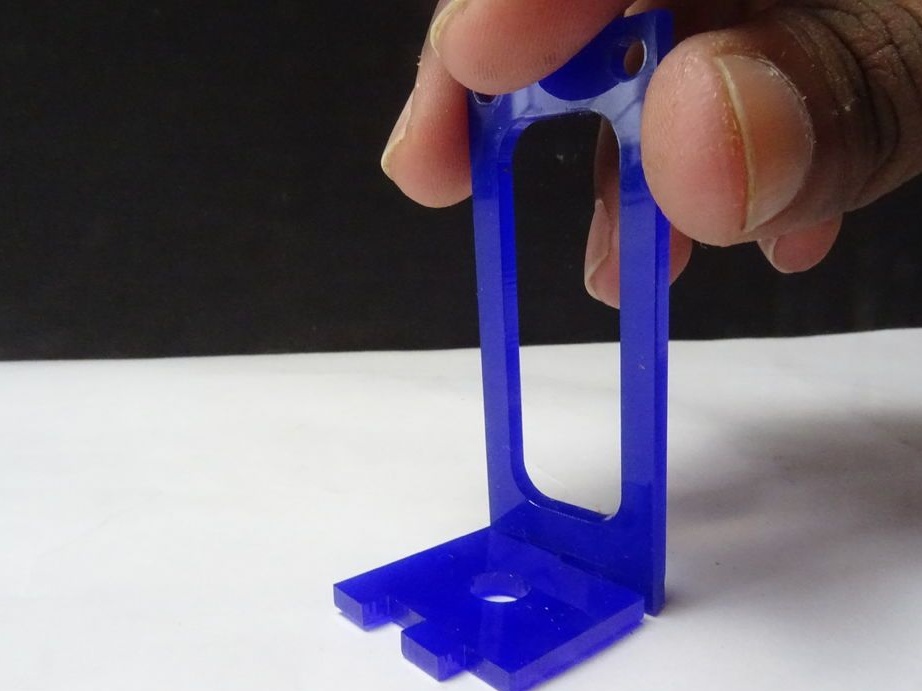

สกรูบนตัวต่อ


ขั้นตอนที่สิบ: จิตรกรรม
เนื่องจากอาจารย์ไม่มีอะครีลิคสีขาวตามความหนาที่ต้องการล้อและขอบจึงถูกตัดออกจากอะคริลิกใสแล้วทาสีขาว




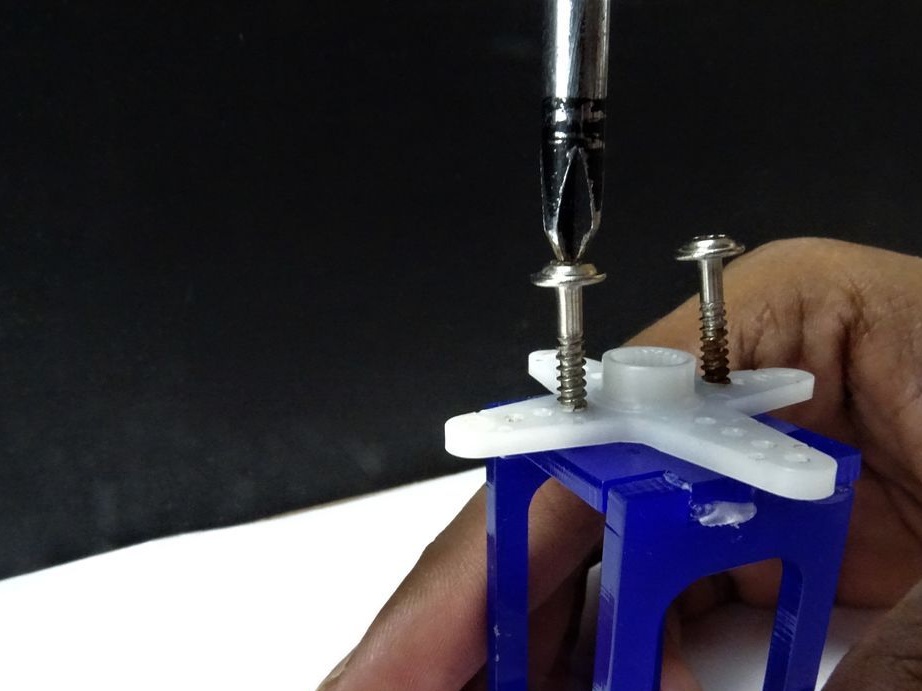
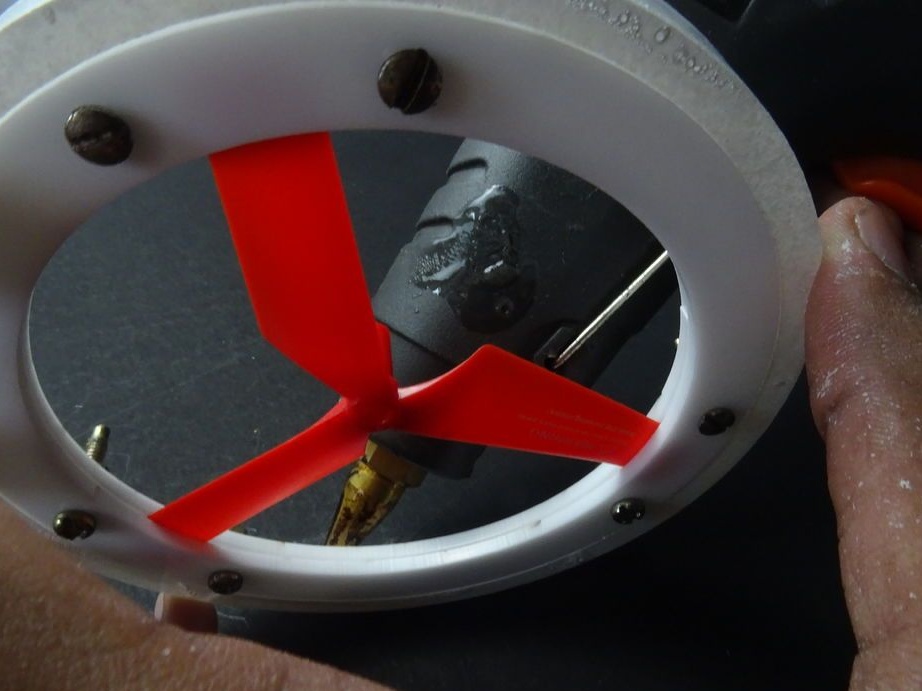
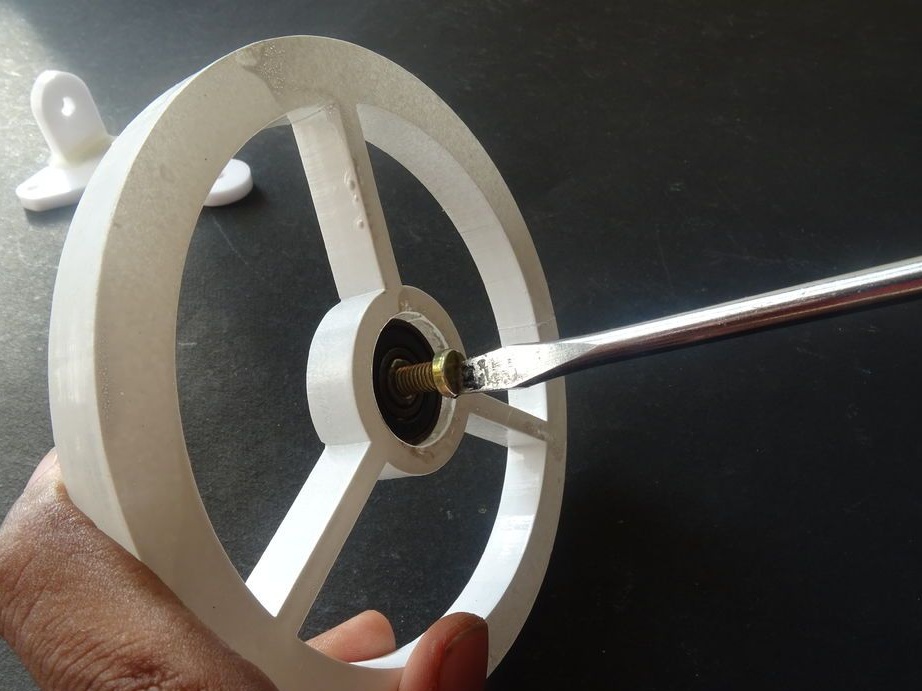
ขั้นตอนที่สิบเอ็ด: ประกอบล้อ
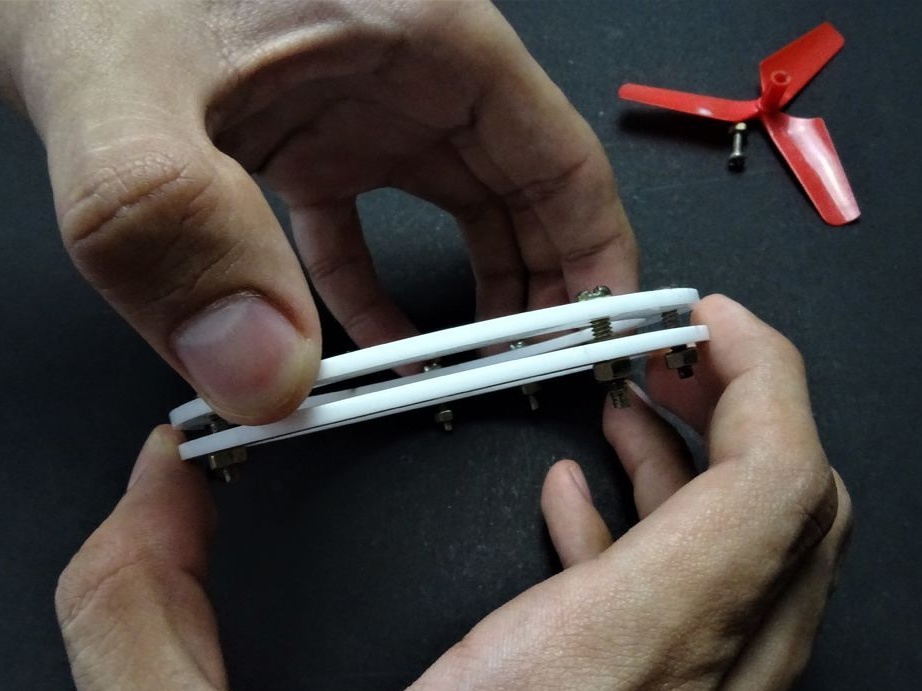
บนสลักเกลียวเก็บล้อสองล้อ สกรูไม่แน่นจนเกินไป




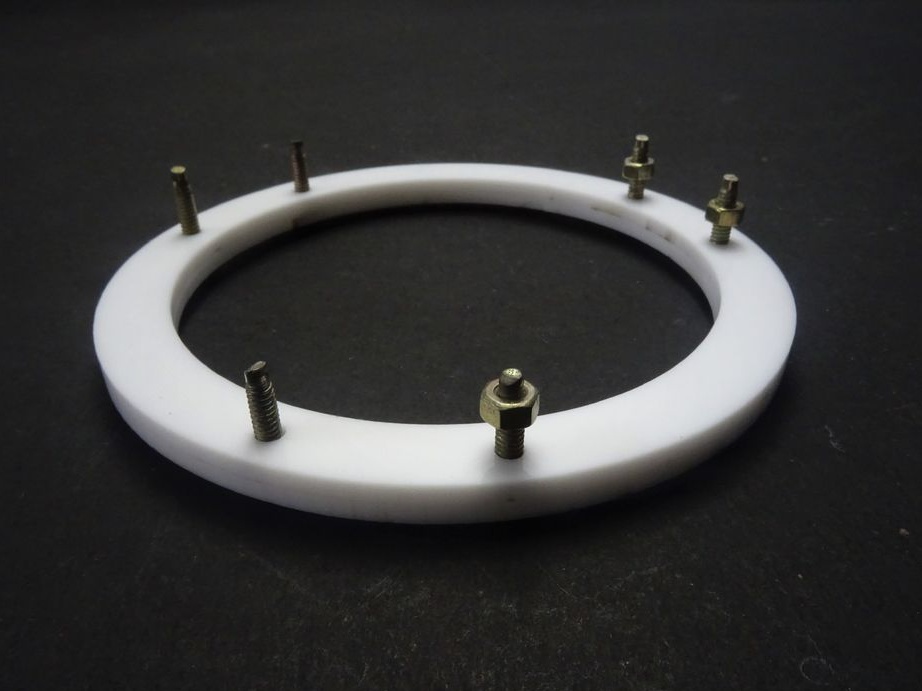
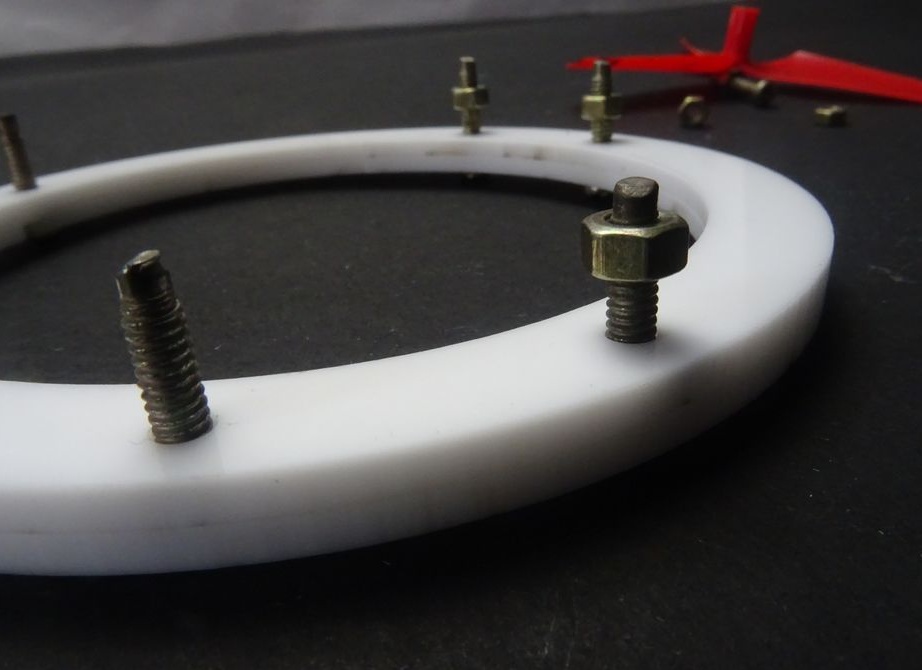
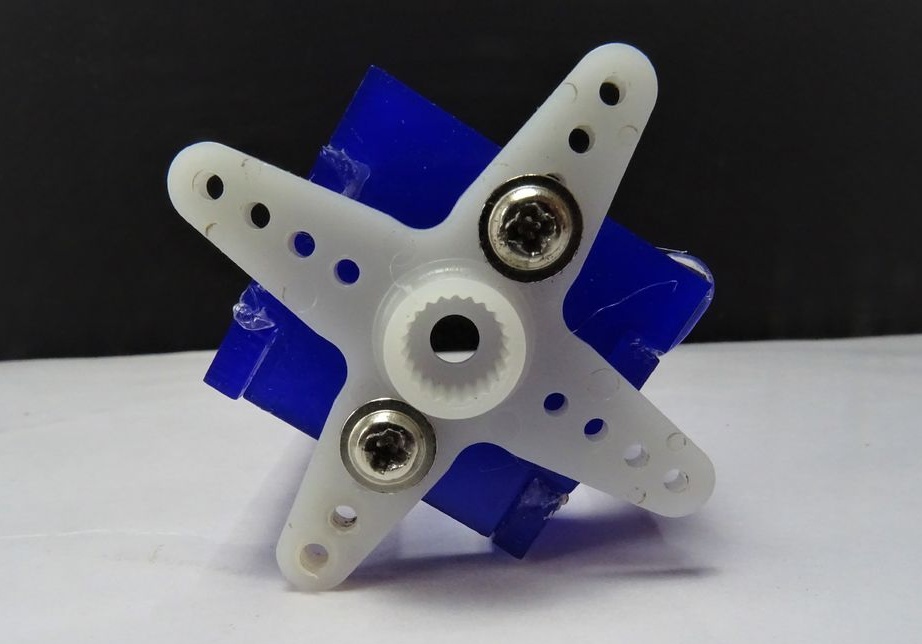
ระหว่างแผ่นดิสก์จะติดตั้งสกรูและขันสกรูให้แน่น เมื่อติดตั้งสกรูคุณต้องใช้เทมเพลตเพื่อจัดให้อยู่กึ่งกลาง
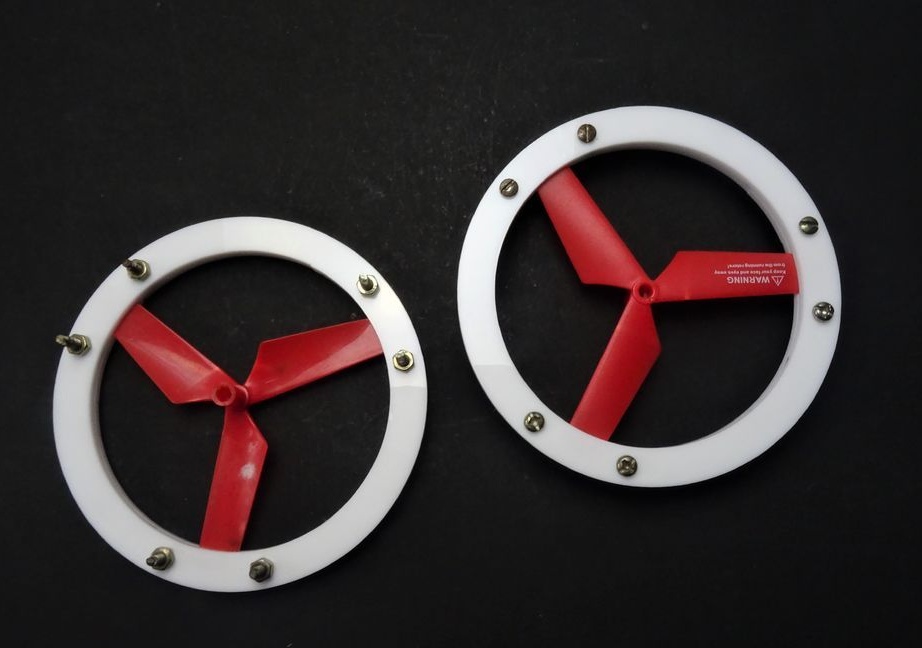
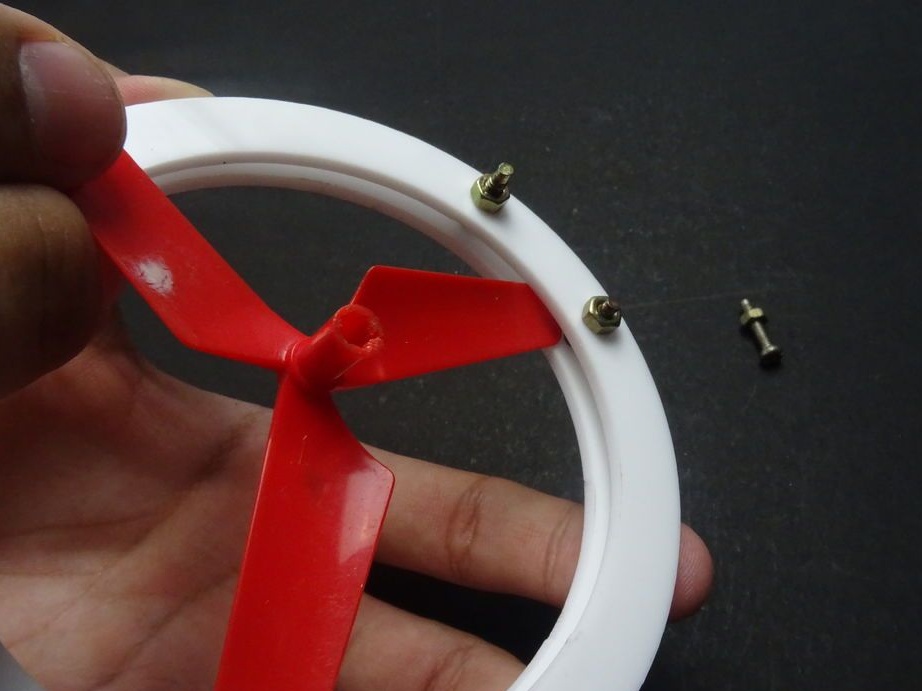
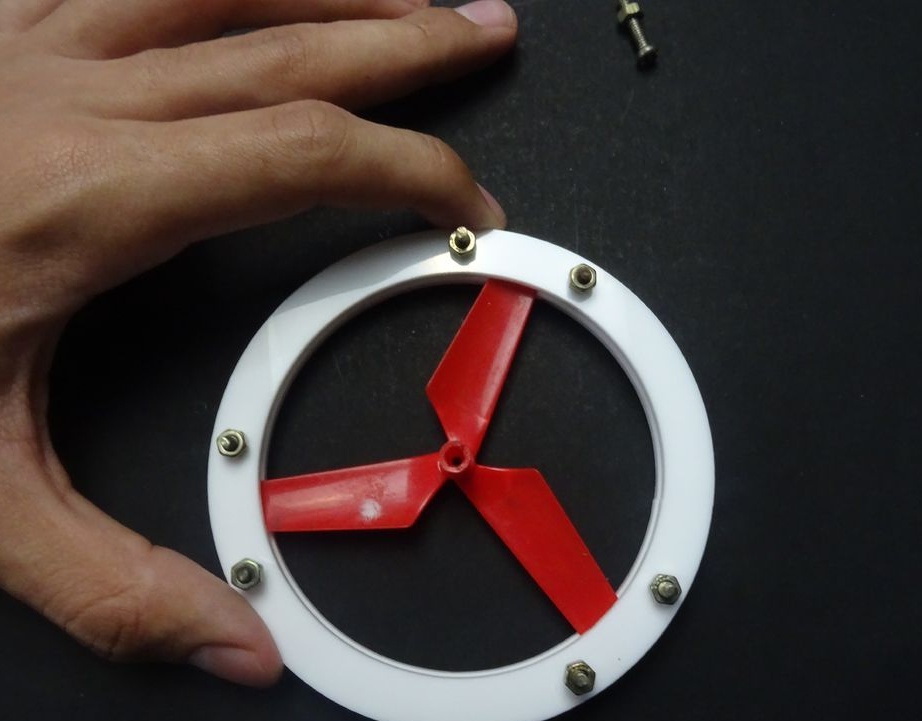
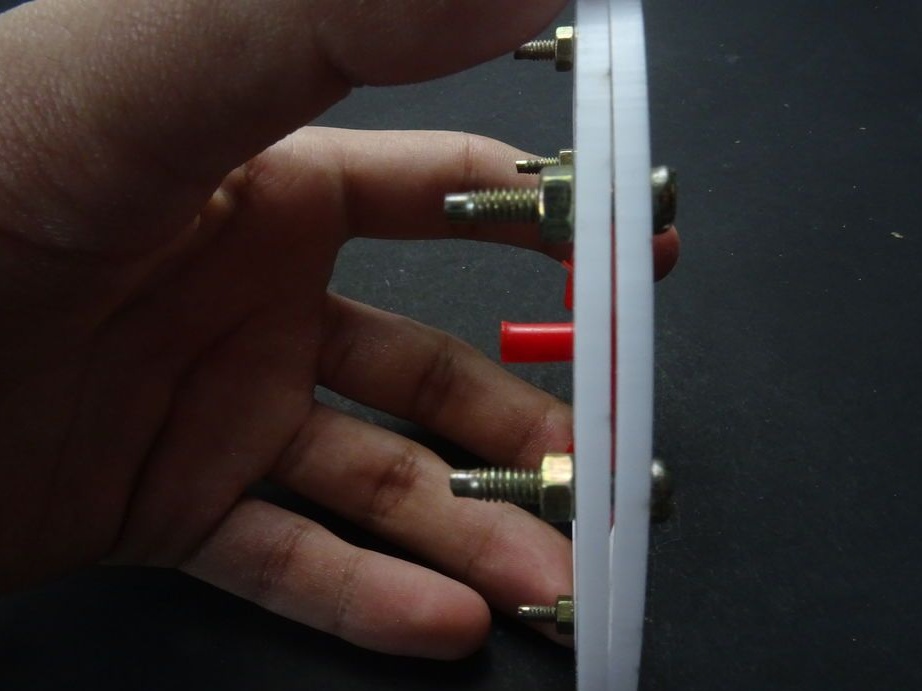

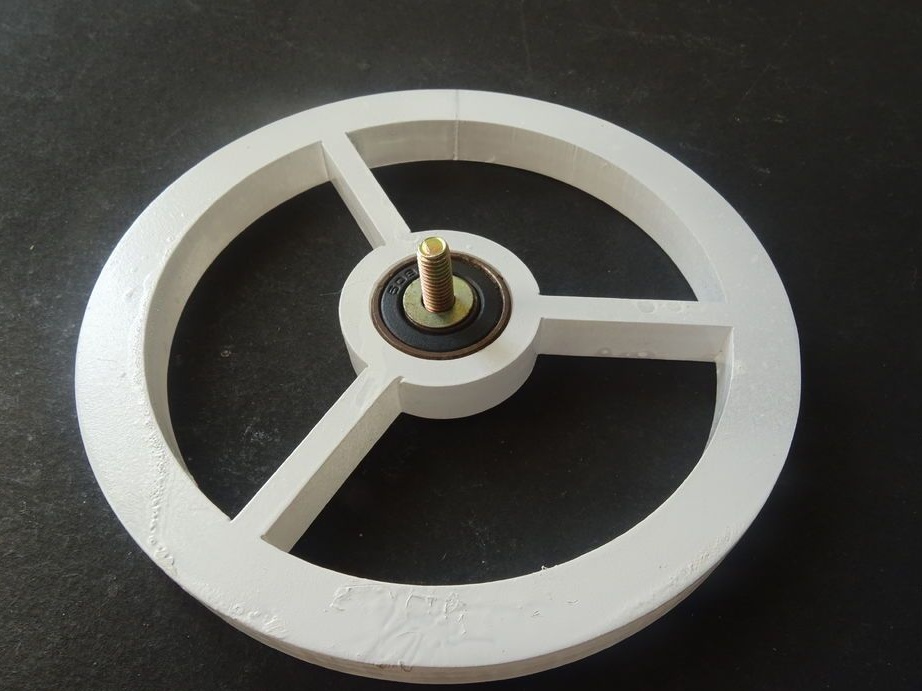
ตั้งขอบล้อด้านนอกของล้อ ขอบจะต้องล้างออกด้วยดิสก์ภายใน
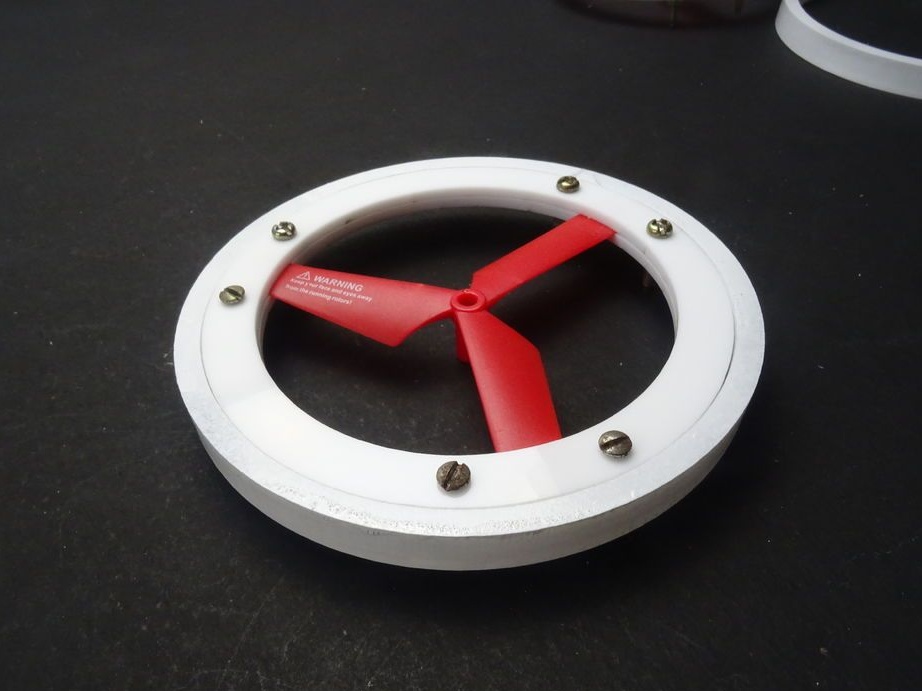

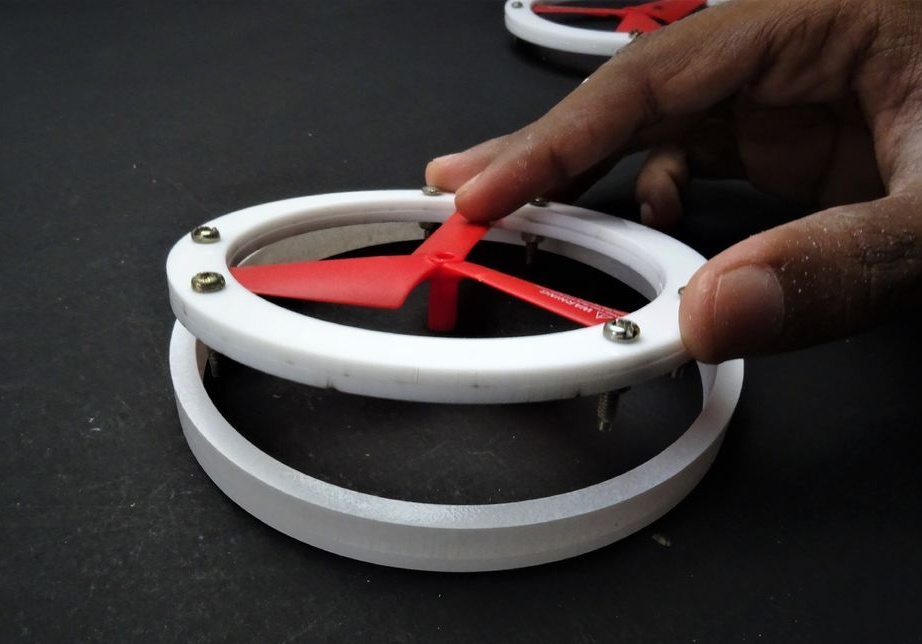
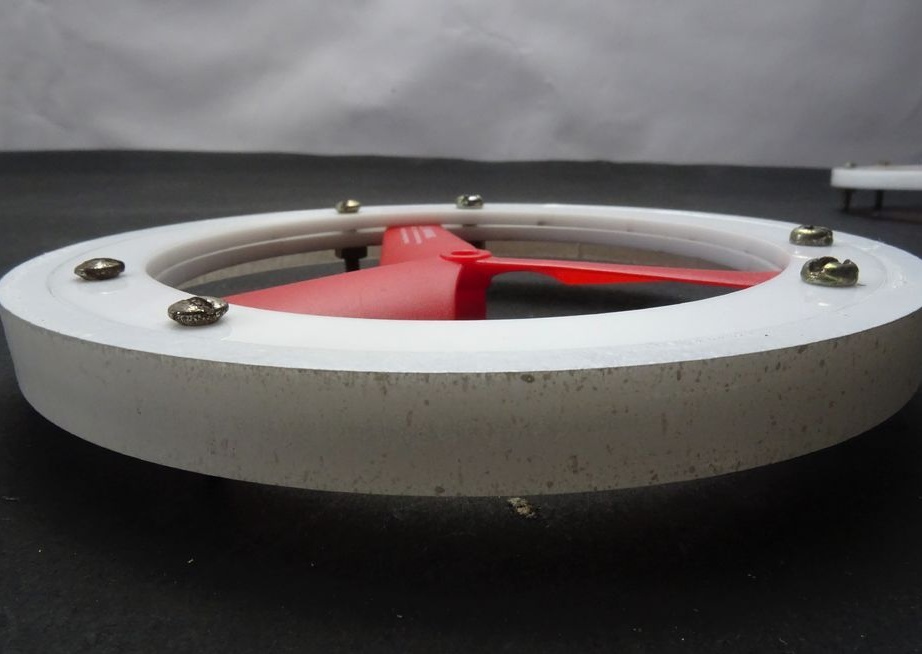

ทากาวร้อนที่ข้อต่อ


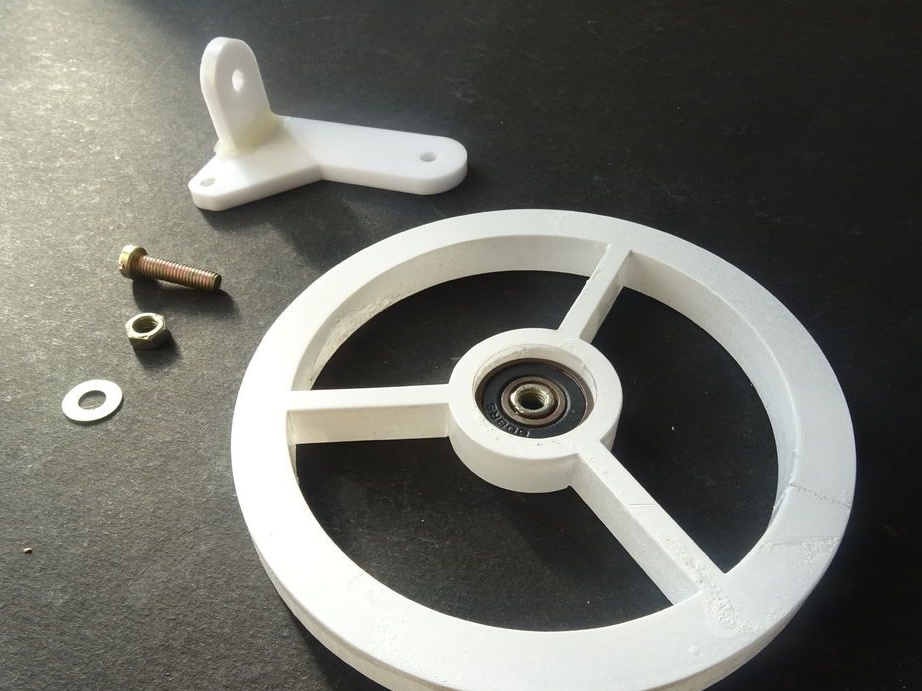
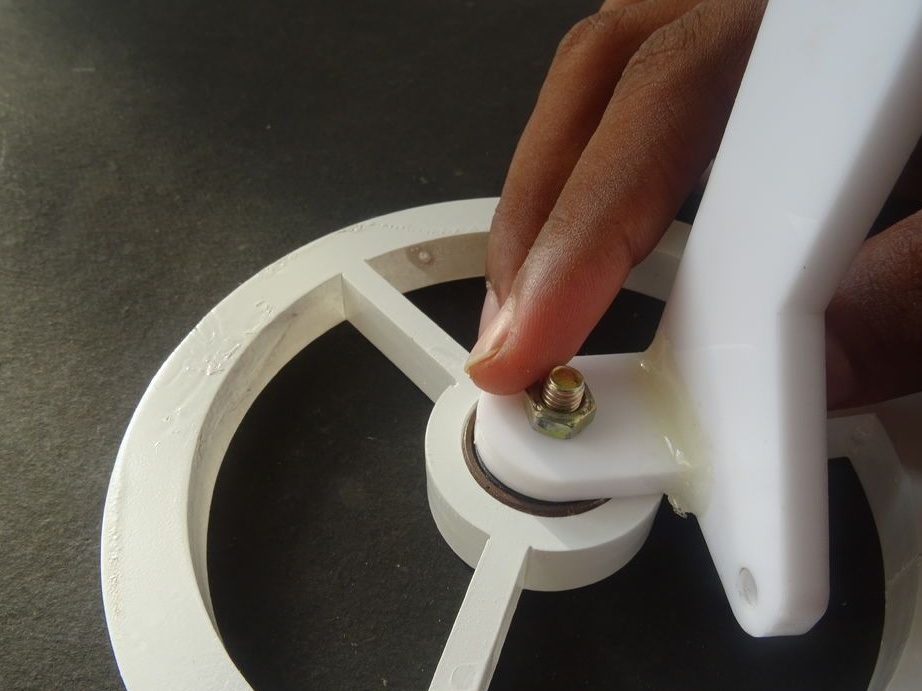
ตอนนี้รวบรวมล้อหน้า
น็อตที่มีขนาดที่เหมาะสมอุดตันในการแข่งขันด้านในของแบริ่ง กดแบริ่งลงในล้อหน้า
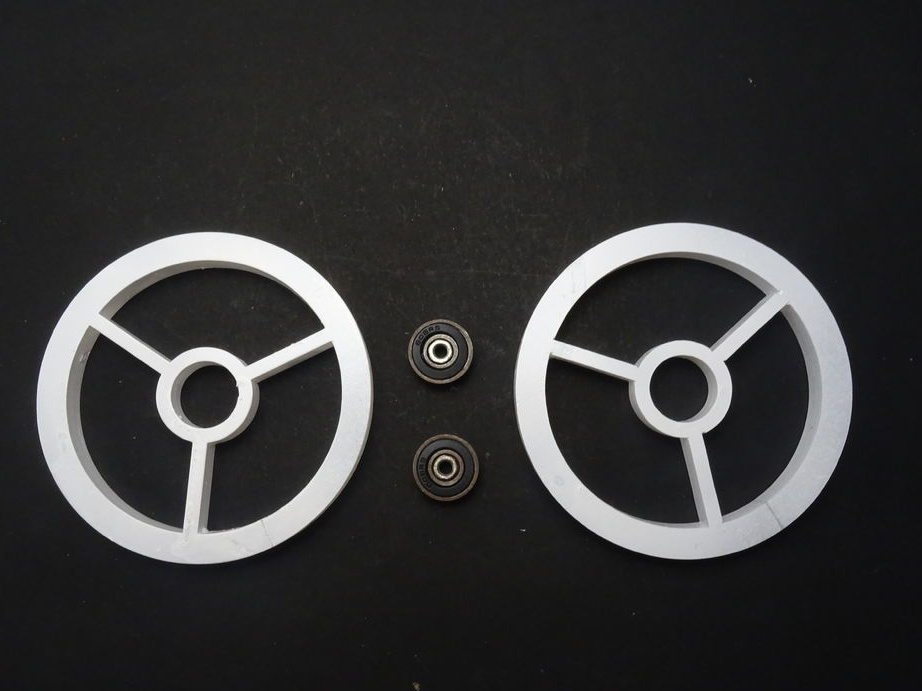



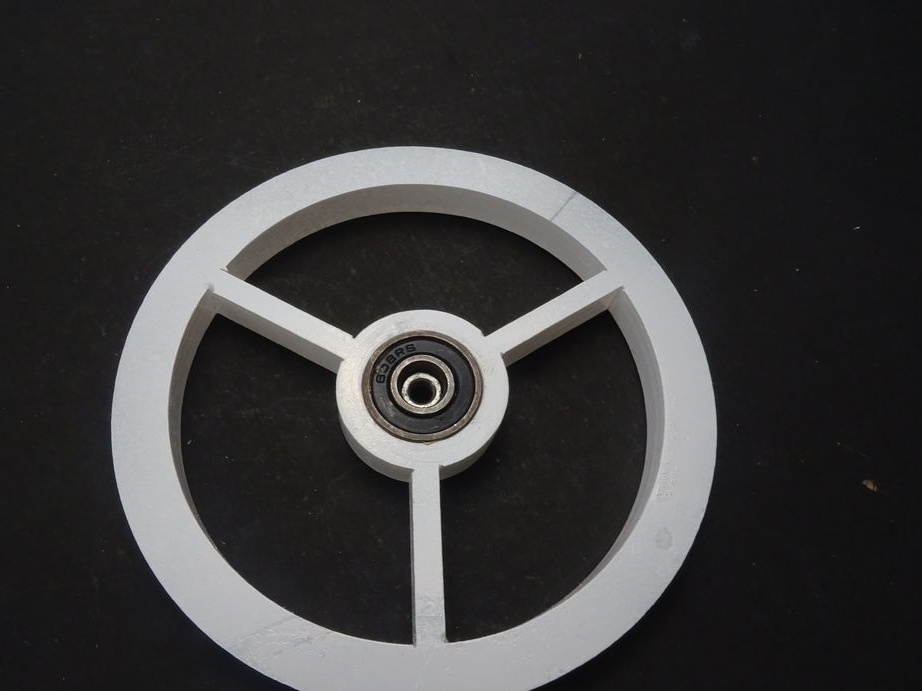
ล้อพร้อมแล้ว

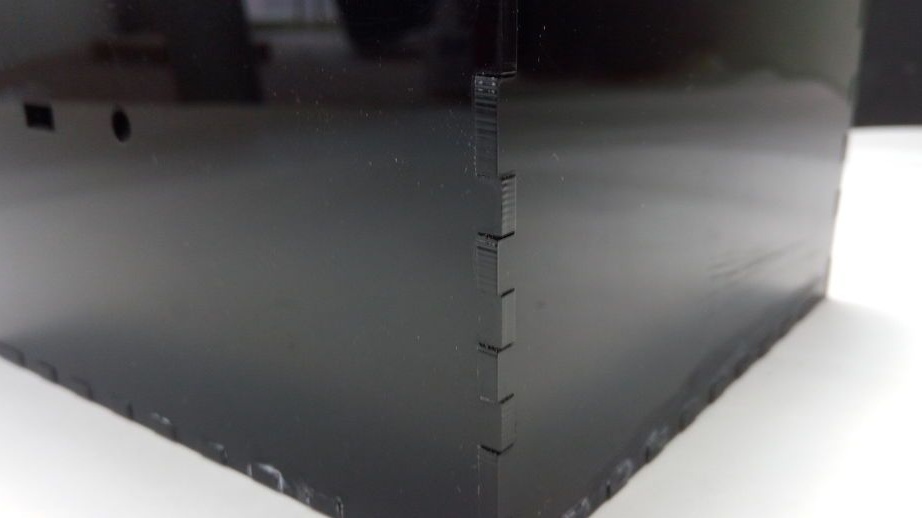
ขั้นตอนที่สิบสอง: ตู้อิเล็กทรอนิกส์
กาวที่อยู่อาศัยสำหรับอุปกรณ์อิเล็กทรอนิกส์
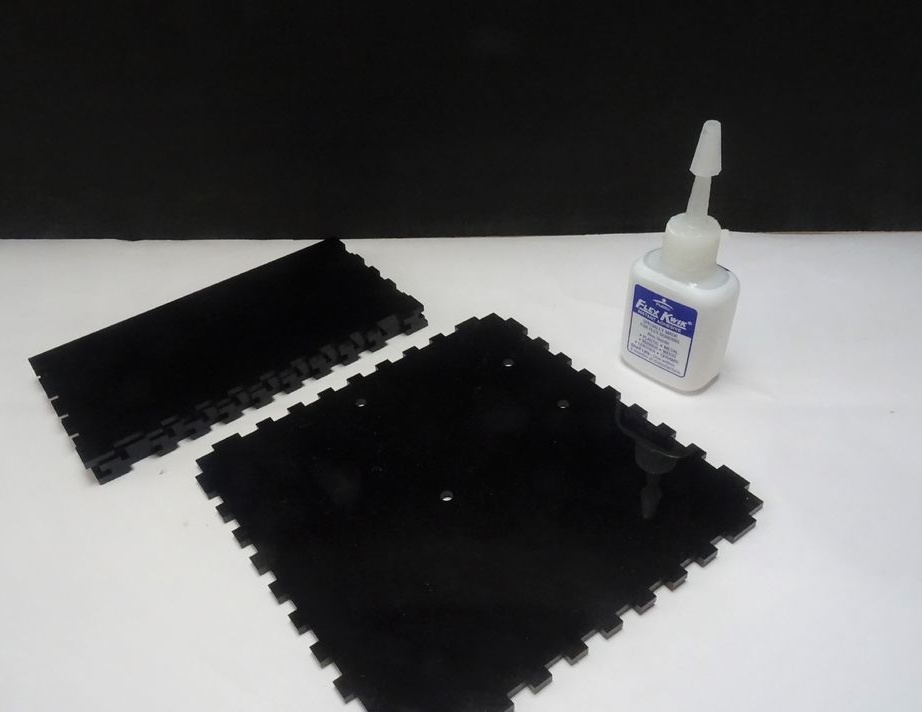
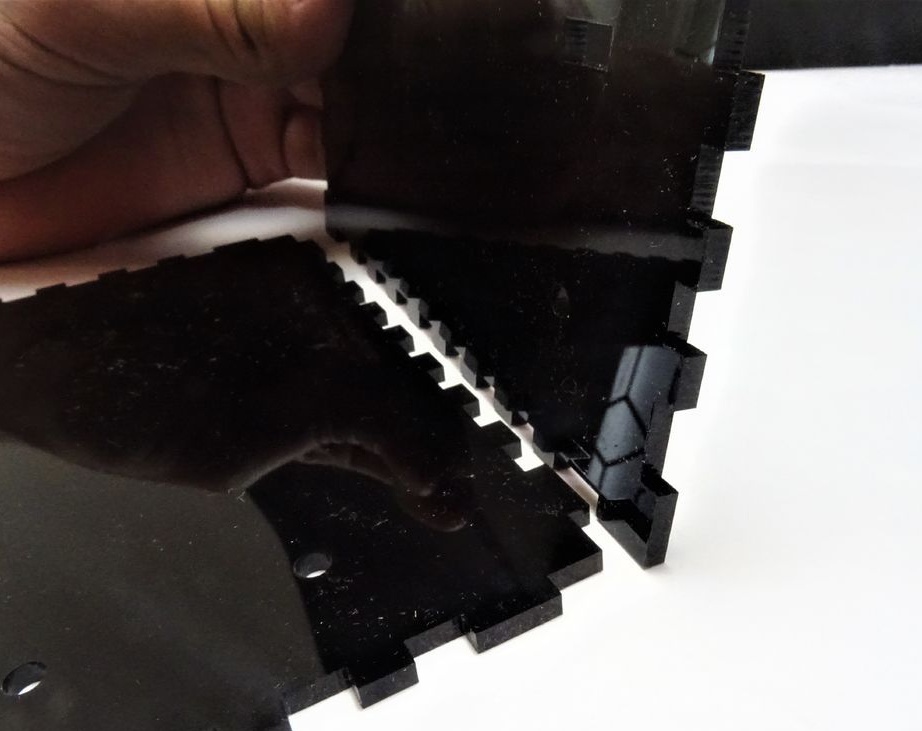

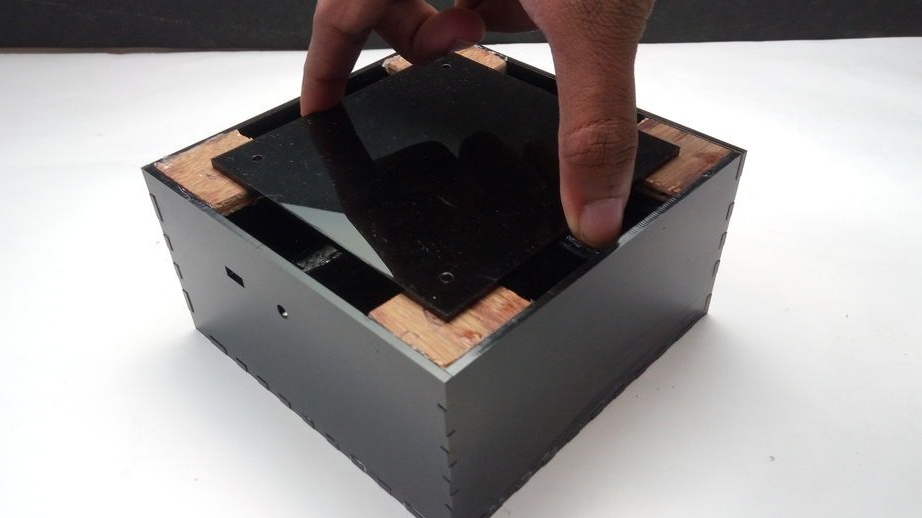
กล่องนี้จะมีทุกอย่าง อิเล็กทรอนิกส์ ส่วนประกอบซึ่งหมายความว่าจะต้องมีการป้องกันน้ำอย่างทั่วถึงที่สุด


สี่เหลี่ยมสี่อันถูกตัดและติดกาวจากกระดานตรงมุมกล่อง ฝากล่องจะถูกแนบมากับพวกเขา



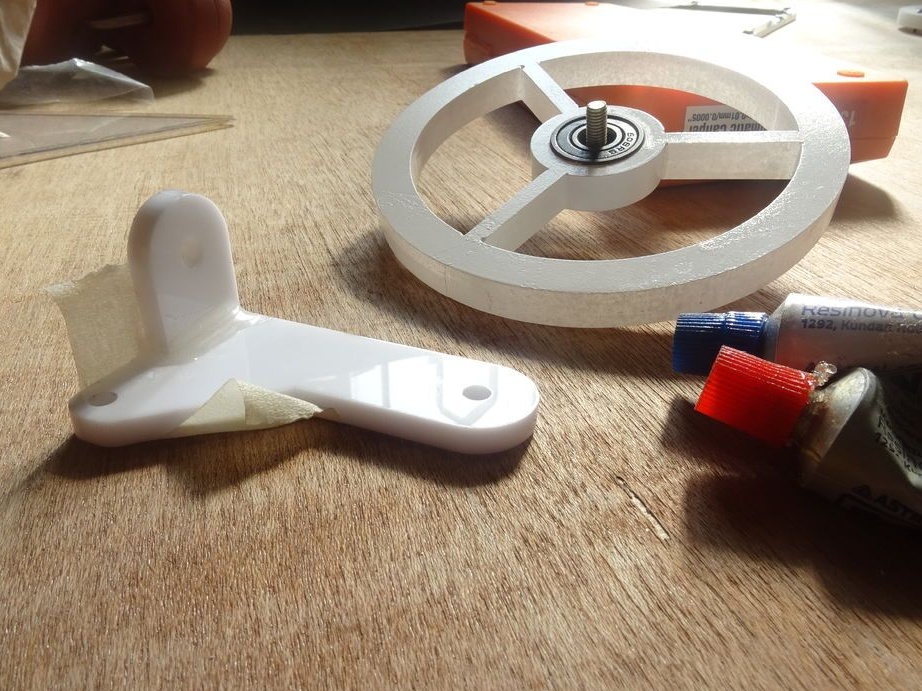
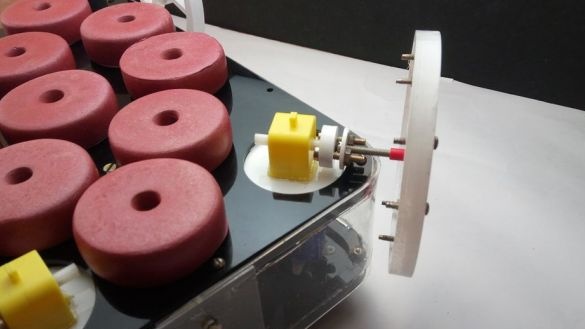
ขั้นตอนที่สิบสาม: Wheel Mount
ตอนนี้คุณต้องเชื่อมต่อล้อและเกียร์ด้วยคลัตช์





สกรูล้อหน้ากับแรงฉุด


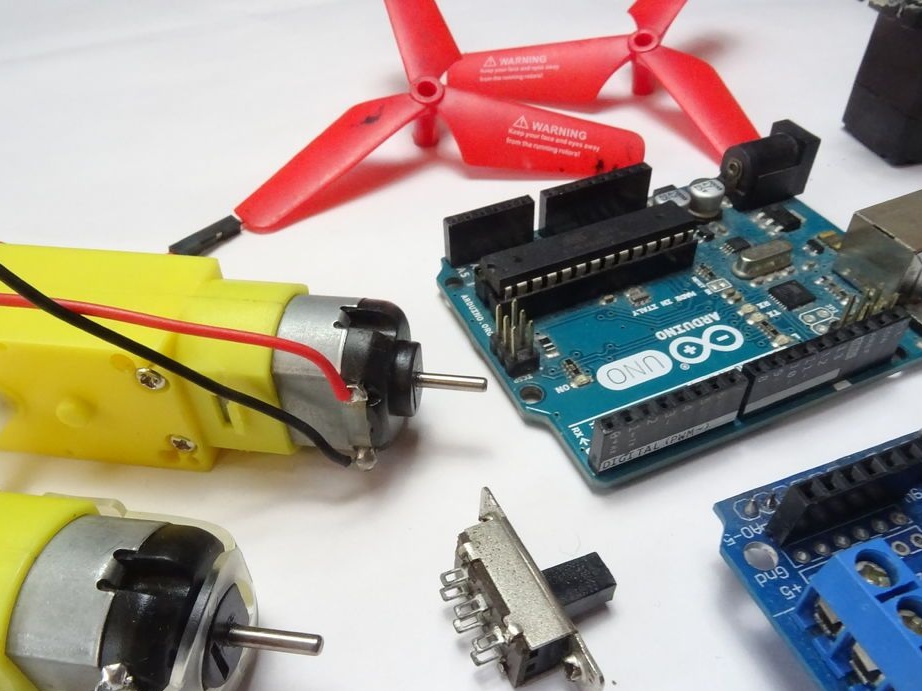
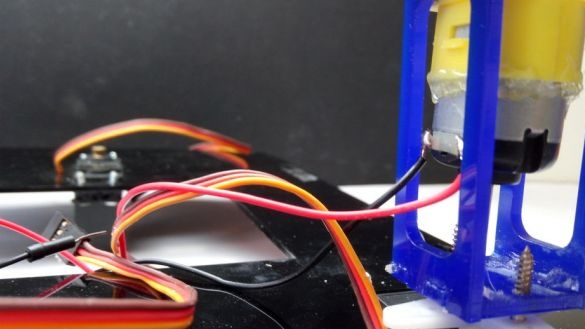
ขั้นตอนที่สิบสี่: เชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์
ตามรูปแบบจะติดตั้งชิ้นส่วนไฟฟ้า
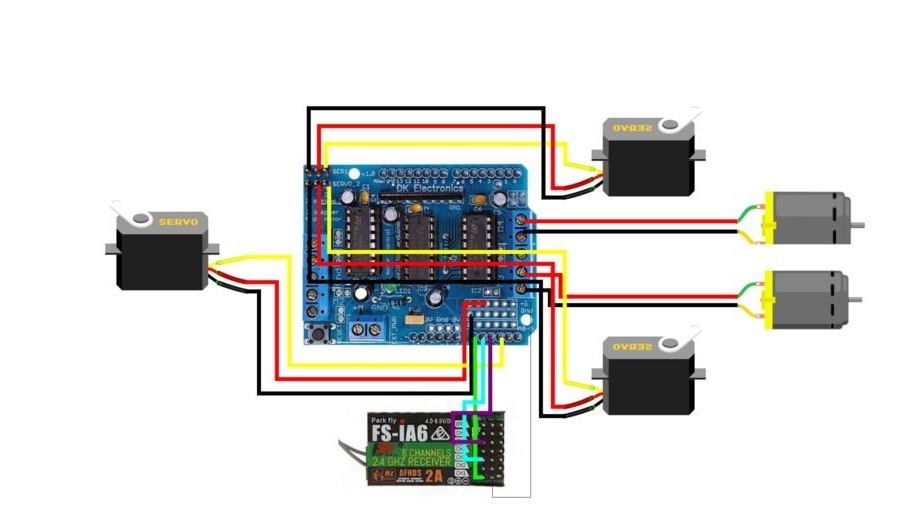

สายไฟของเครื่องยนต์ด้านซ้ายไปยัง M1, ด้านขวาของ M2 เชื่อมต่อไดรเวอร์เครื่องยนต์ เชื่อมต่อเซอร์โว ติดตั้งตัวรับ: gnd ของตัวรับสัญญาณเพื่อ gnd Arduino; รับสัญญาณ +5 V ถึง +5 V Arduino; ขา 3 ถึง A0; ขา 1 ถึง A1; ขา 5 ถึง A2 เชื่อมต่อแบตเตอรี่
ขั้นตอนที่สิบห้า: รหัสดาวน์โหลด
ก่อนอื่นคุณต้องดาวน์โหลด ห้องสมุด.
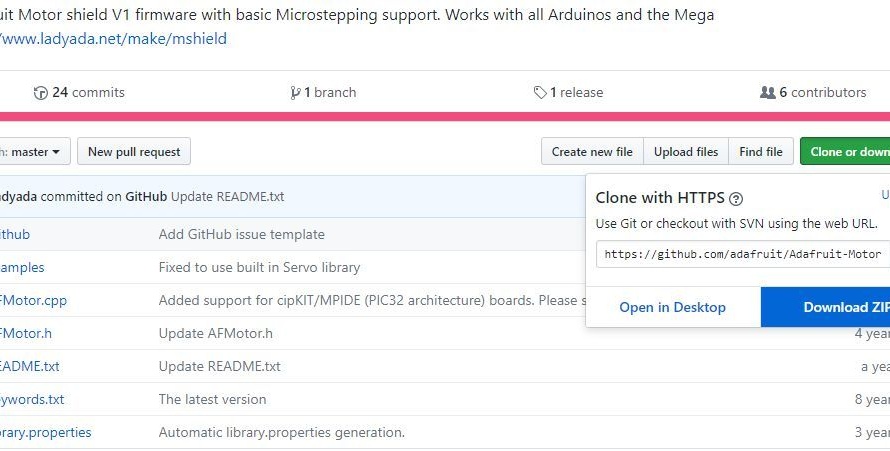
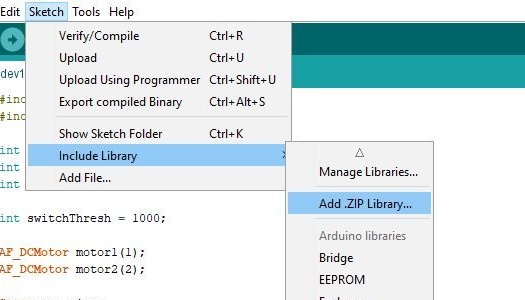
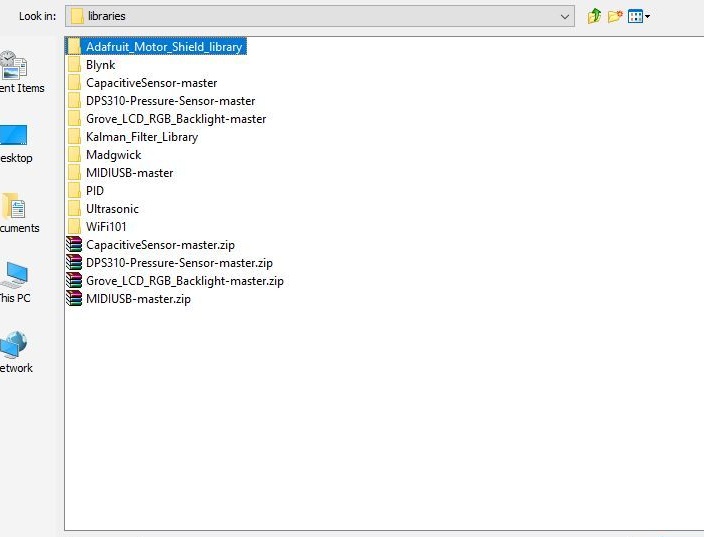
จากนั้นดาวน์โหลดรหัส เมื่อทำการโหลดควรถอดแบตเตอรี่ออก
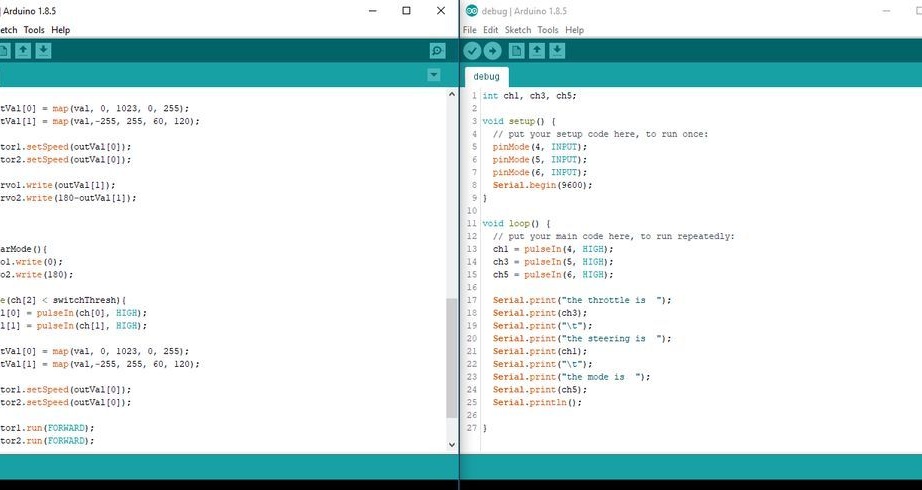
ดาวน์โหลดรหัสด้านล่าง
amphibious_rover_code.ino
หลังจากดาวน์โหลดรหัสแล้วจะตรวจสอบการทำงานของมอเตอร์และไดรฟ์
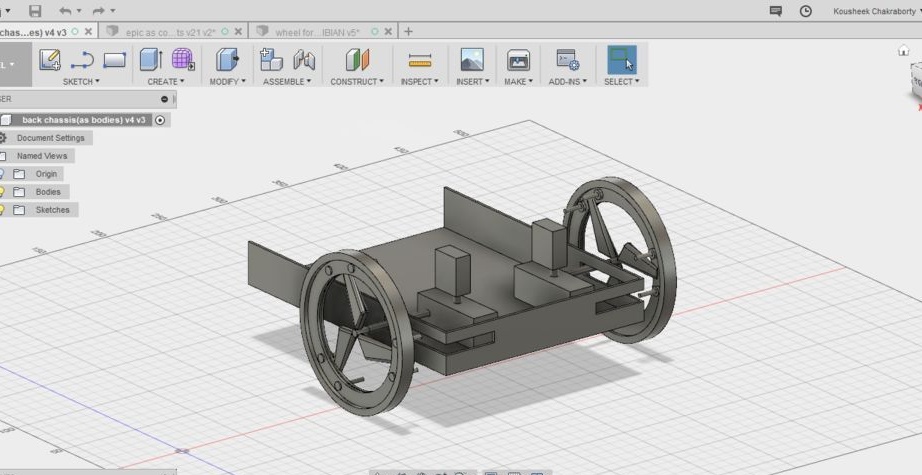
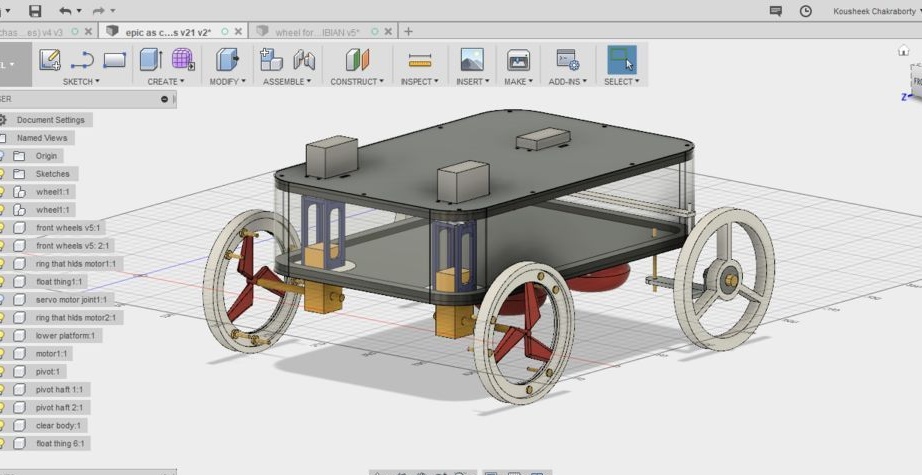
ขั้นตอนที่สิบหก: การชุมนุม
ตอนนี้ได้เวลารวบรวมยานพาหนะทุกพื้นที่แล้ว
[ศูนย์[/ center]
ติดตั้งเซอร์โว ติดตั้งมอเตอร์เกียร์

ยึดล้อ บิดทั้งสองส่วนของร่างกาย






ทุกอย่างพร้อมและตอนนี้คุณสามารถทดสอบ