


แต่ก่อนอื่นมาคิดกันว่ามันคืออะไรและทำไมมันถึงต้องการ ในความเป็นจริงชื่อของมันบอกเราถึงวัตถุประสงค์ มันถูกสร้างขึ้นจาก curvus คำภาษาละตินซึ่งหมายถึงโค้งหรือหยัก นั่นคือ curvimeter คือเครื่องวัดระยะล้อหรือลูกกลิ้ง มีสองประเภทของ curvimeter ที่โดดเด่น: ขนาดเล็ก (cartographic) ซึ่งมักใช้สำหรับการวัดบนแผนที่และใหญ่ (ถนน) ซึ่งมักจะใช้ในการวัดความยาวของส่วนโค้งของทางหลวงแล้ว พวกเขาสามารถใช้ทุกที่ไม่สะดวกหรือเป็นไปไม่ได้ที่จะวัดด้วยรูเล็ตมาตรฐานดังนั้นโครงการสัญญาว่าจะน่าสนใจ
สิ่งแรกที่ต้องดูแลเมื่อสร้าง curvimeter คือล้อหรือลูกกลิ้ง มันต้องมีขนาดเล็กพอที่ความแม่นยำของเครื่องมือจะสูงในขณะเดียวกันก็ต้องมีขนาดใหญ่พอที่ค่าของการอ่านจะไม่ได้รับผลกระทบอย่างมากจากความไม่สม่ำเสมอของพื้นผิวที่วัด ในกรณีของฉันล้อมีเส้นผ่านศูนย์กลาง 14 เซนติเมตร

ตอนนี้คุณต้องกำหนดวัสดุและขนาดของโครงสร้าง ฉันใช้ต้นไม้

บนแถบฉันทำเครื่องหมายและทำการตัดและรูที่จำเป็น

จากนั้นฉันก็ประกอบชิ้นส่วนกลึงด้วยสกรูตัวเองเล็ก ๆ
ทีนี้ลองแยกตัวออกมาจาก curvimeter สักหน่อยแล้วลองคิดดูว่าสิ่งนี้สามารถกำหนดระยะทางได้อย่างไร ทุกอย่างเรียบง่าย เราแค่ต้องคำนวณจำนวนรอบการหมุนของล้อและคูณด้วยความยาวของเส้นรอบวงด้านนอกและมันก็ยิ่งง่ายขึ้นในการเพิ่มค่าความยาวในแต่ละครั้งที่วงล้อหมุนรอบอีกครั้ง
หากต้องการนับการปฏิวัติแต่ละครั้งในกรณีที่ง่ายที่สุดคุณสามารถใช้ "ผู้ติดต่อแบบเลื่อน" อย่างไรก็ตามฉันไม่แนะนำให้ใช้กลไกอ้างอิงดังกล่าว มันจะดีกว่ามากเมื่อใช้สวิตช์กกหรือเซ็นเซอร์ฮอลล์
ได้เวลาลองล้อแล้ว ฉันจะยึดด้วยกลอนยาว เราพบสถานที่บนเฟรมที่ขอบล้อใกล้เคียงที่สุดเท่าที่จะทำได้และทำเครื่องหมายด้วยสโตรก รอบบริเวณนี้เราจะต้องติดตั้งสวิตช์กก

บนพวงมาลัยคุณต้องติดตั้งแม่เหล็กขนาดเล็กตรวจสอบให้แน่ใจว่ากำลังของเขาเพียงพอที่จะปิดหน้าสัมผัสของสวิตช์กก
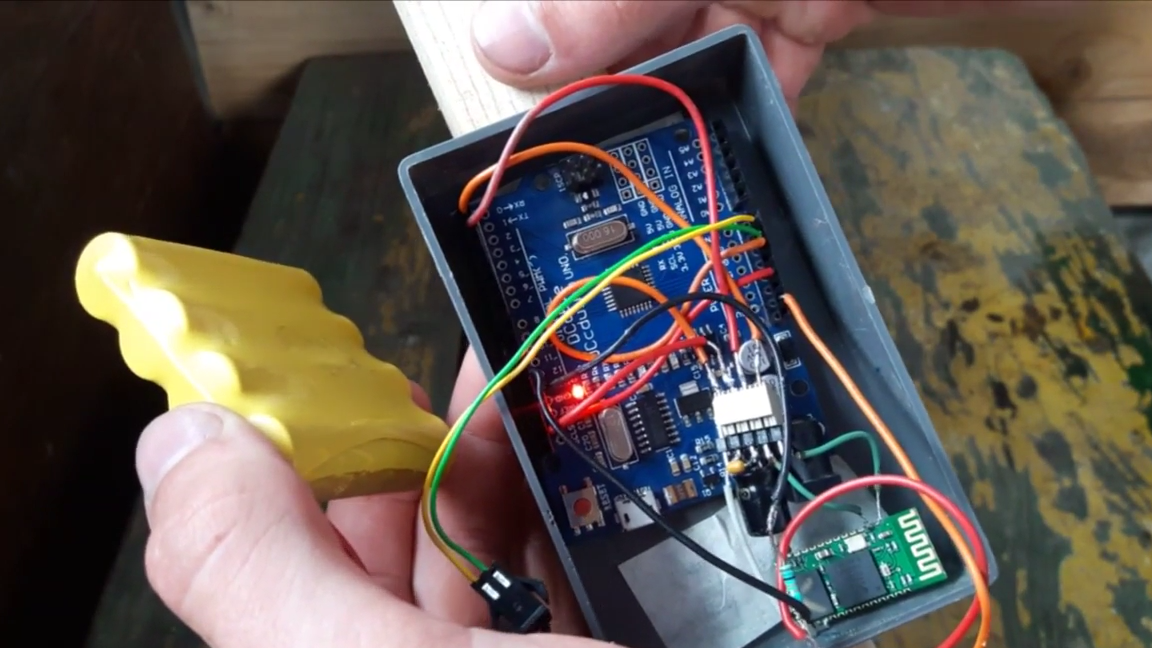
ตอนนี้เราจะมีส่วนร่วมใน "สมอง" ของระบบ ในกรณีของฉันนี่เป็นค่าธรรมเนียม Arduino UNO มันจะอ่านสถานะของสวิตช์กกและส่งข้อมูลผ่านการเชื่อมต่อบลูทู ธ โดยใช้โมดูล HC-05 ไปยังโทรศัพท์ โดยวิธีการสวิทช์กกเชื่อมต่อกับบอร์ดเหมือนปุ่มปกติ ฉันคิดว่าไม่ควรมีปัญหาใด ๆ กับการเชื่อมต่อโมดูลบลูทู ธ
สำหรับโค้ดนั้นมันง่ายมาก และฉันพยายามที่จะแสดงความคิดเห็นเพื่อให้ทุกอย่างชัดเจนที่สุด
int gercon = 12; // เชื่อมต่อสวิตช์ลิ้นเป็น 12 พิน
ระยะทางคู่ = 0; // สร้างตัวแปรคู่เพื่อเก็บระยะทาง
การตั้งค่าเป็นโมฆะ () {
Serial.begin (9600); // เชื่อมต่อการเชื่อมต่อแบบอนุกรม
}
void loop () {
/ * ถัดไปคือ if loop หากสวิตช์กกถูกปิดการคำนวณระยะทางถัดไปจะเกิดขึ้น ค่า 0.46472 นั้นเป็นความยาวที่คำนวณได้จากการหมุนวงล้อหนึ่งครั้ง เพื่อหลีกเลี่ยงข้อมูล "พิเศษ" เพิ่มความล่าช้า 200 มิลลิวินาทีและแสดงการอ่าน
* /
ถ้า (digitalRead (gercon) == สูง)
{
distance = distance + 0.46472;
ล่าช้า (200);
อนุกรม. println (ระยะทาง);
}
} 
นี่คือ curvimeter ของเราและพร้อมแล้ว!
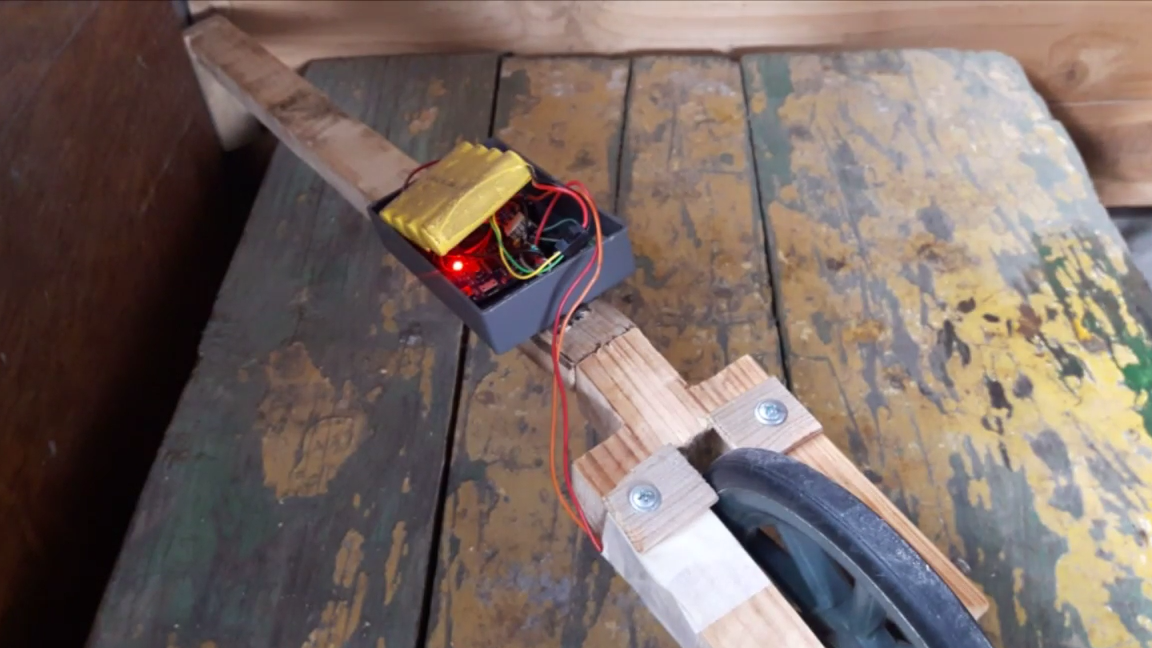
มาลองทดสอบการแข่งขันกันดู ทุกอย่างใช้งานได้ดี!

คุณสามารถดูวิดีโอในชุดอุปกรณ์นี้บางทีคุณอาจพบว่ามีบางสิ่งที่น่าสนใจ
[media = https: //youtu.be/kx_7ztPsLws]
ทำซ้ำโครงการได้ดี!