
วัสดุและเครื่องมือสำหรับการผลิต:
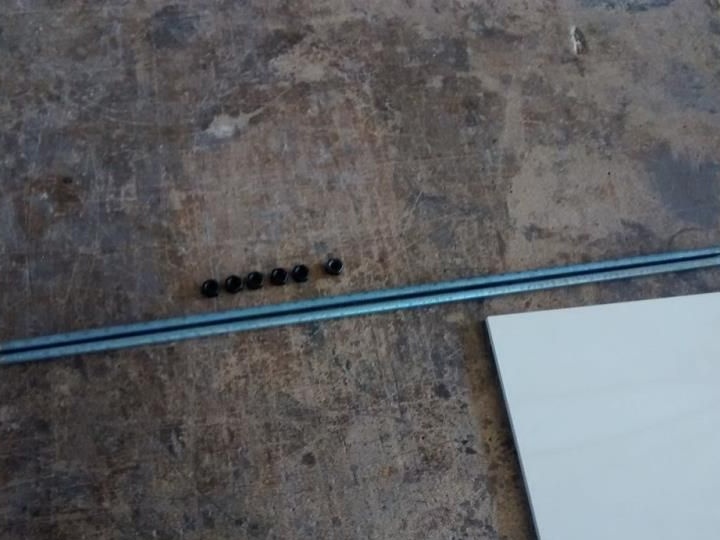
- เพลาแบบเกลียว
- ไม้อัด
- สลักเกลียวและถั่ว
- ลูกปืน;
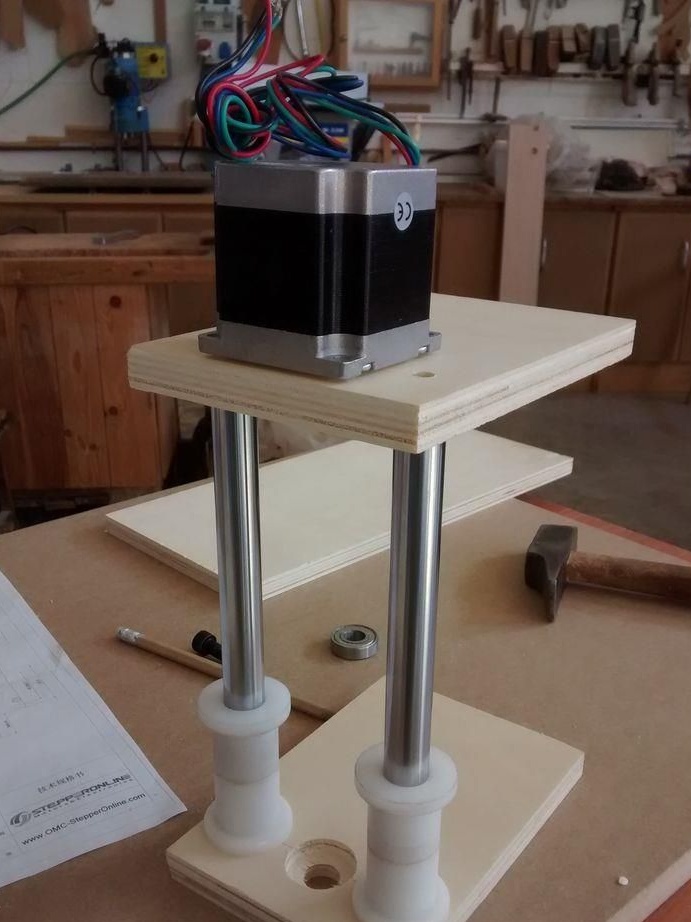
- สเต็ปเปอร์มอเตอร์เช่น Nema 23
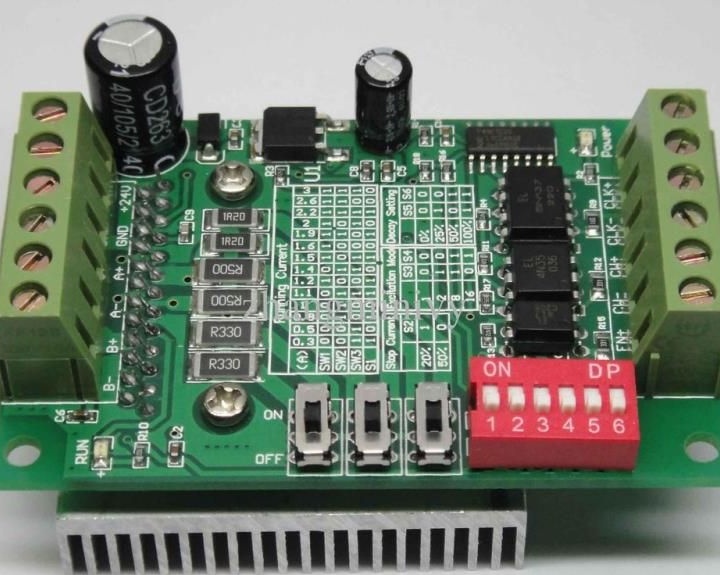
- ไดรเวอร์ TB6560 จำเป็นสำหรับสเต็ปเปอร์มอเตอร์
- การติดตั้งใช้พลังงานไฟฟ้าด้วยแรงดันไฟฟ้า 24 V 15 A
- Arduino UNO R3;
- บูชโลหะเช่นเดียวกับบูชที่ทำจากไนลอน (เป็นไปได้จาก caprolon หรือฟลูออโรเรซิ่น)
- สายไฟ









กระบวนการผลิต:
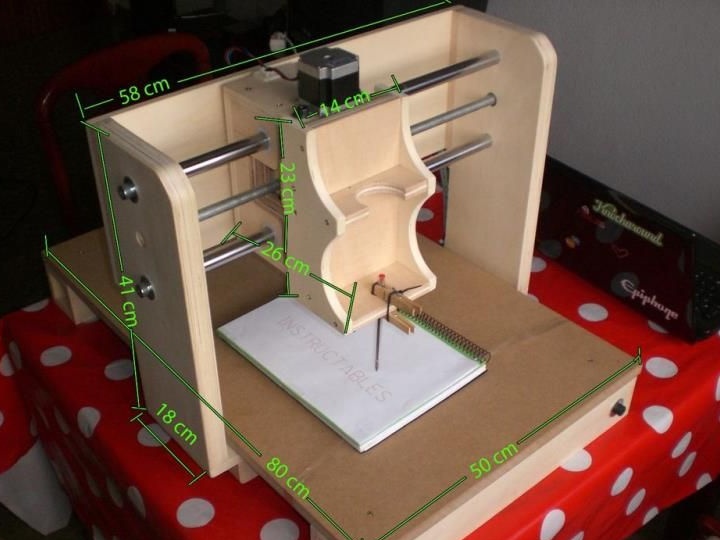
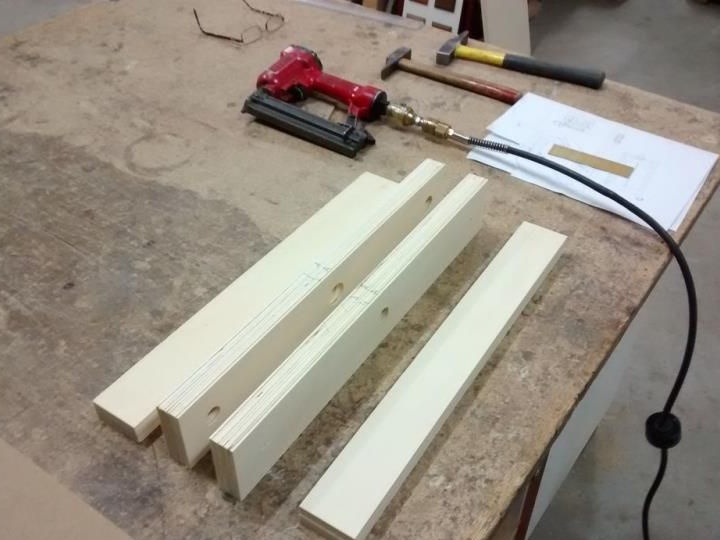
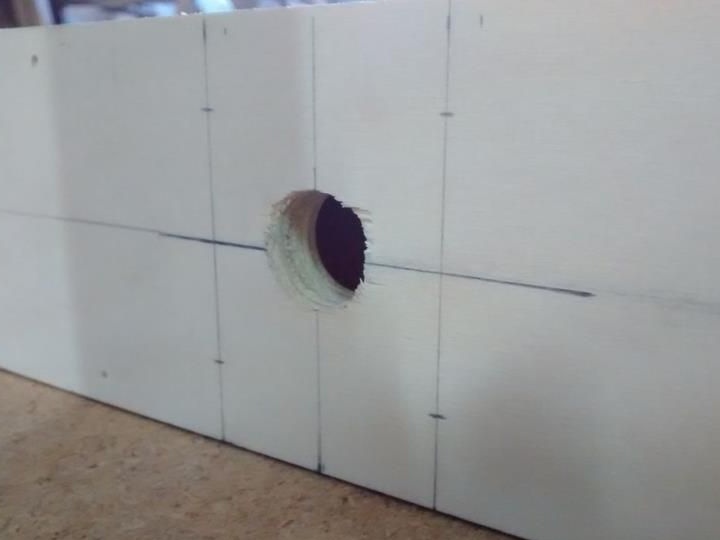
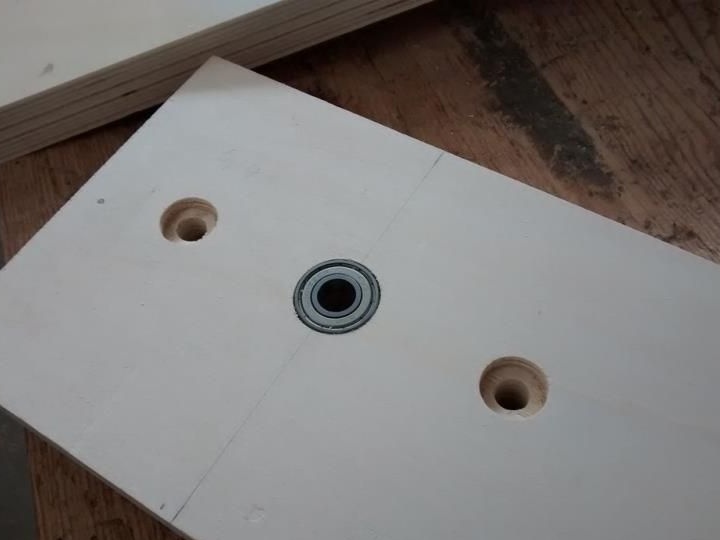
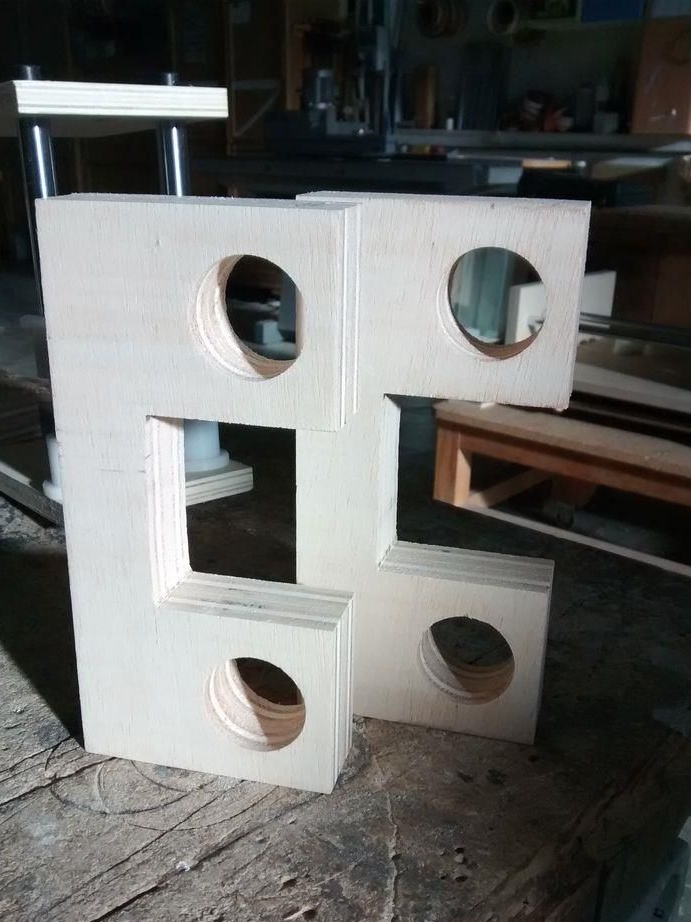
ขั้นตอนแรก ทำฐานของเครื่อง (แกน X)
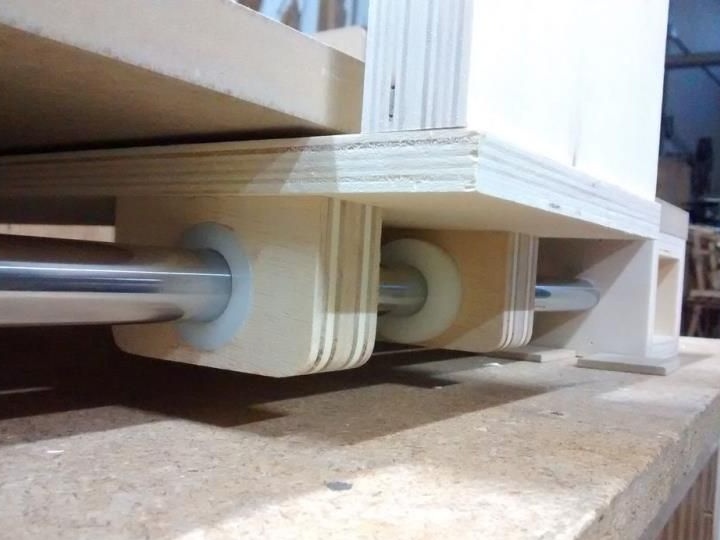
ในการสร้างฐานคุณจะต้องใช้หลายแท่งในการเจาะรูตาบอดและผ่านรู จากนั้นติดตั้งเพลาโลหะพวกเขาทำหน้าที่เป็นไดรฟ์สำหรับแกน X
เพลาเธรดถูกติดตั้งที่กึ่งกลางและมีการติดตั้งเพลาเหล็กสองอันที่ด้านข้างเพื่อเป็นไกด์ เมื่อเพลาเธรดหมุนแคร่จะเลื่อนตารางเธรดตามแกน X
แถบควรหนาที่สุดเท่าที่จะเป็นไปได้เนื่องจากฐานที่มีน้ำหนักมากขึ้นเครื่องก็น่าเชื่อถือมากขึ้นในระหว่างการใช้งาน และนี่ก็ช่วยเพิ่มฝีมือระหว่างการทำงาน






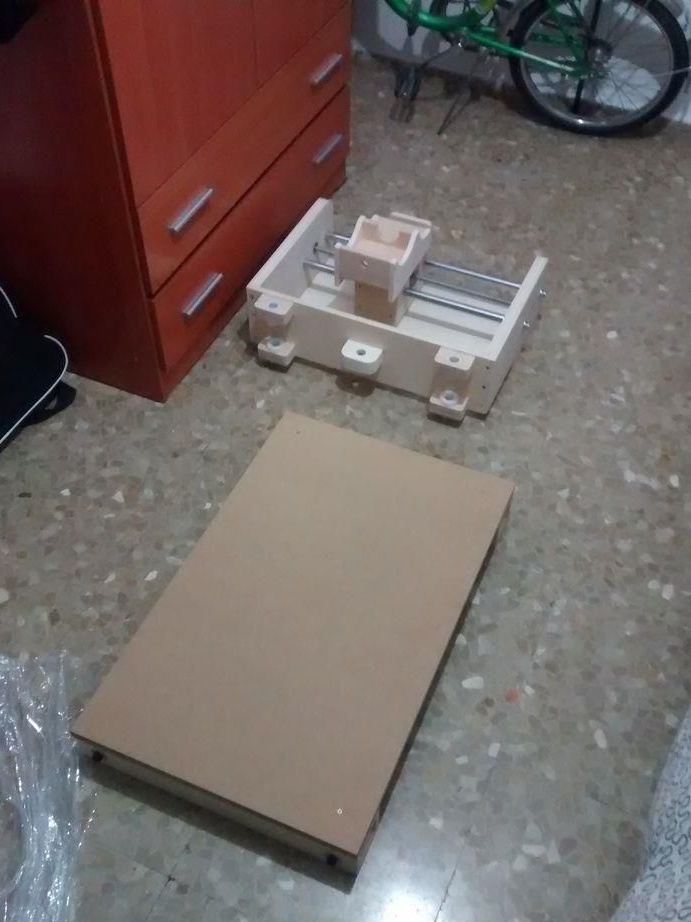
ขั้นตอนที่สอง สร้างแกน Y
โครงสร้างพอร์ทัลสำหรับแกน Y ถูกสร้างขึ้นในลักษณะเดียวกับฐาน X พอร์ทัลได้รับการแก้ไขในตารางที่เคลื่อนย้ายได้ซึ่งเคลื่อนที่ไปตามแกน X เมื่อเกิดเหตุการณ์นี้คุณจะเห็นได้ในภาพถ่าย




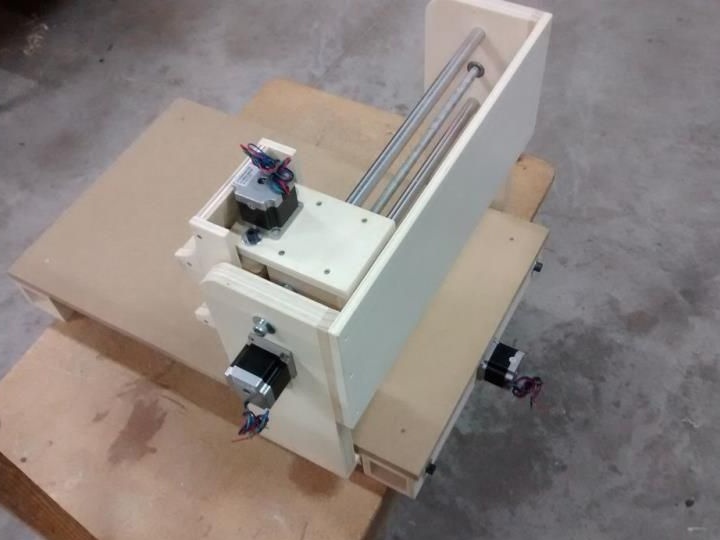
ขั้นตอนที่สาม สร้างแกน Z
แกน Z ถูกสร้างขึ้นเหมือนกันกับสองคนก่อนหน้านี้ เนื่องจากแกนนี้มีการเคลื่อนไหวในแนวตั้งของร่างกายที่ทำงานซึ่งฟีดเครื่องมือ











ขั้นตอนที่สี่ การประกอบชิ้นส่วน
นอกจากนี้หลังจากองค์ประกอบทั้งหมดได้ถูกผลิตขึ้นแล้วเครื่องสามารถประกอบและกระบวนการนี้ไม่ซับซ้อน ในการเชื่อมต่อองค์ประกอบใช้สลักเกลียวพร้อมน็อต ขนาดของเครื่องสามารถเปลี่ยนแปลงได้ทุกอย่างขึ้นอยู่กับความต้องการส่วนบุคคลหากในระหว่างกระบวนการประกอบชิ้นส่วนใด ๆ พังคุณไม่จำเป็นต้องใช้กาวเพื่อซ่อมแซมพวกเขามันเป็นสิ่งที่ดีที่สุดในการผลิตองค์ประกอบ ในกรณีนี้ความแข็งที่จำเป็นขององค์ประกอบจะถูกจัดเตรียม


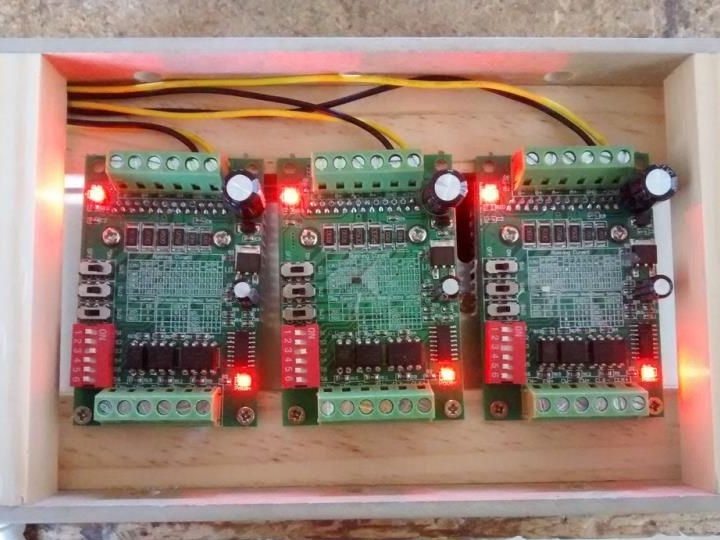
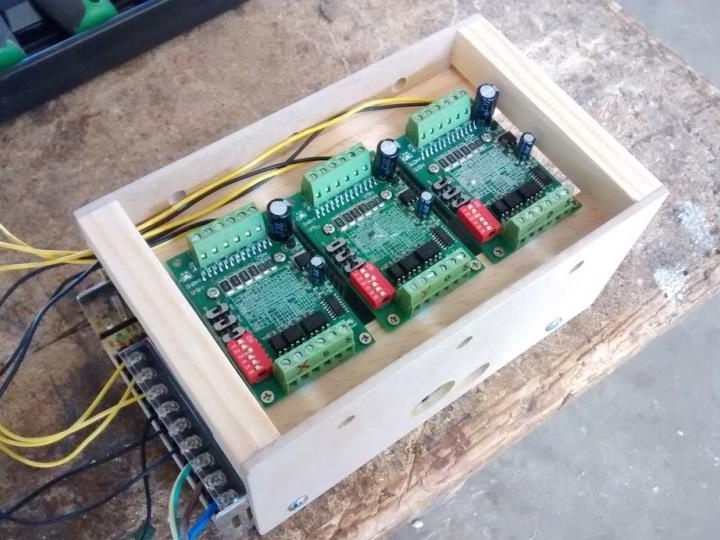
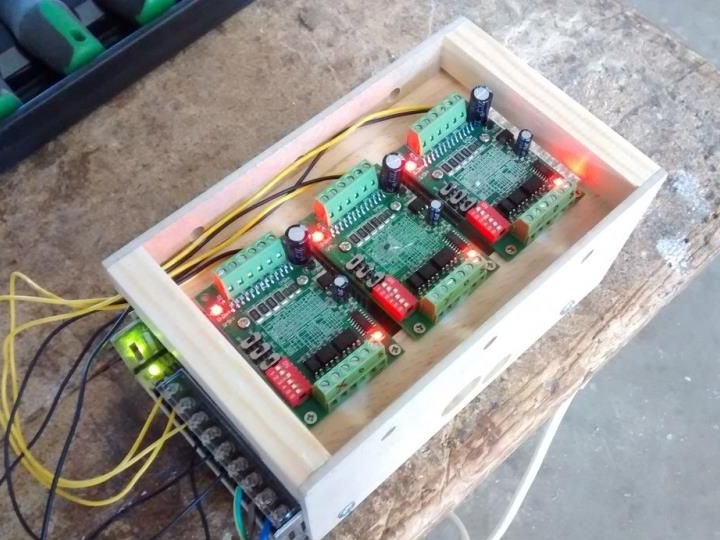
ขั้นตอนที่ห้า ชิ้นส่วนอิเล็กทรอนิกส์ของอุปกรณ์
เมื่อประกอบชิ้นส่วนเชิงกลแล้วคุณสามารถดำเนินการเชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์ได้ คุณต้องเชื่อมต่อ Arduino กับไดรเวอร์และมอเตอร์สเต็ป ไดรเวอร์แต่ละตัวต้องใช้แหล่งพลังงานเพื่อทำงาน ผู้เขียนใช้แหล่งจ่ายไฟ 24 V 15 A สำหรับผู้ขับขี่ที่นี่จะถูกเลือกเป็นรายบุคคลขึ้นอยู่กับกำลังของเครื่องยนต์ มอเตอร์คอยส์และขั้วจะระบุด้วยตัวอักษร A +, A-, B +, B-

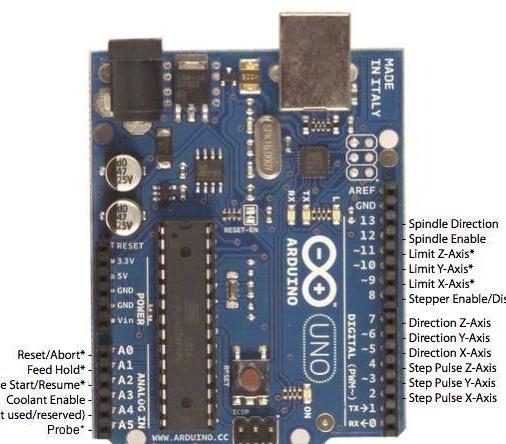




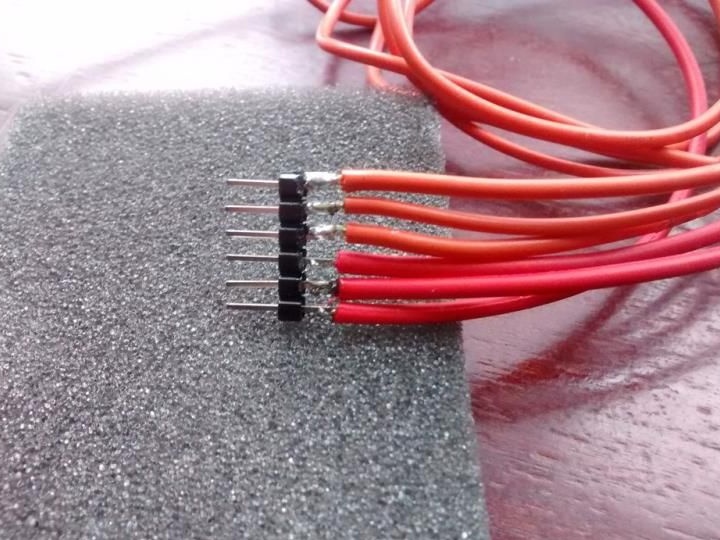
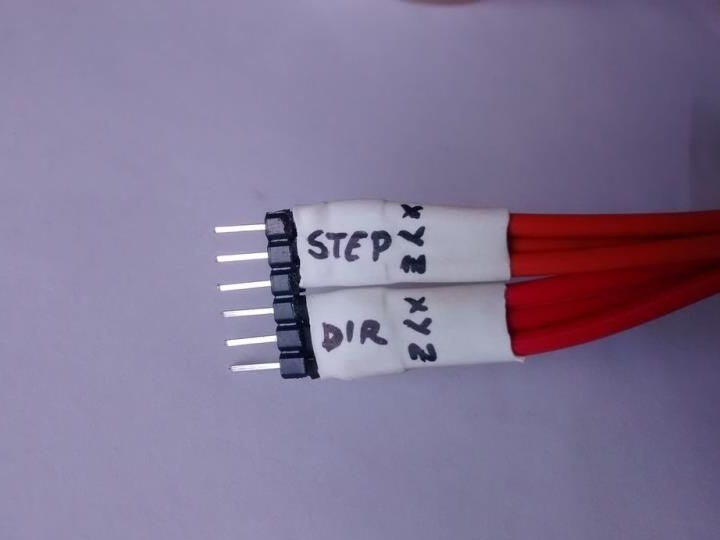

เอาต์พุต CLK + ต้องเชื่อมต่อกับพินพินใน Arduino ต้องเชื่อมต่อพิน CW + กับพินทิศทาง CLK- และ CW จำเป็นต้องเชื่อมต่อกับพิน GND ไม่ได้ใช้ผู้ติดต่อ EN + EN-
ขั้นตอนที่หก ส่วนซอฟต์แวร์ของอุปกรณ์
ขั้นตอนต่อไปคือการดาวน์โหลดซอฟต์แวร์ที่จะควบคุมเครื่อง กระบวนการไม่ซับซ้อนคุณต้องดาวน์โหลดรหัสโดยใช้โปรแกรม XLoader บนบอร์ด Arduino หลังจากนั้นคุณต้องเปิด GCodeSender เพื่อเชื่อมต่อบอร์ด Arduino กับคอมพิวเตอร์ส่วนบุคคล หลังจากนั้นบอร์ดจะพร้อมควบคุมเครื่องซีเอ็นซี
นั่นคือทั้งหมดที่เครื่องพร้อมคุณสามารถทดสอบในทางปฏิบัติ ในการตั้งค่าพารามิเตอร์ที่จำเป็นสำหรับการประมวลผลวัตถุคุณต้องใช้รูปวาดใด ๆ จากโปรแกรม CAD จากนั้นเมื่อใช้โปรแกรม CAM รหัส G จะถูกสร้างขึ้นเพื่อวัตถุประสงค์เหล่านี้จะสะดวกในการใช้โปรแกรม MasterCam X7 มันมีทั้ง CAD และ CAM อยู่แล้ว