




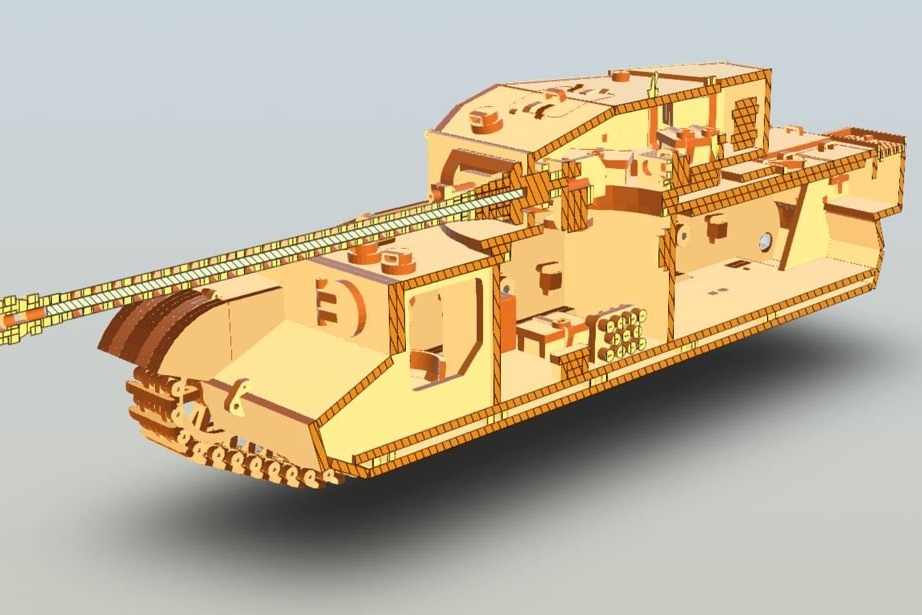
รถถังนี้ไม่ใช่ชุดแรกของนาย คุณสมบัติที่โดดเด่นของรถรุ่นนี้คือระบบกันสะเทือนแบบสปริงซึ่งติดตั้งเครื่องยนต์พร้อมการบำรุงรักษา
มาดูตัวอย่างกัน
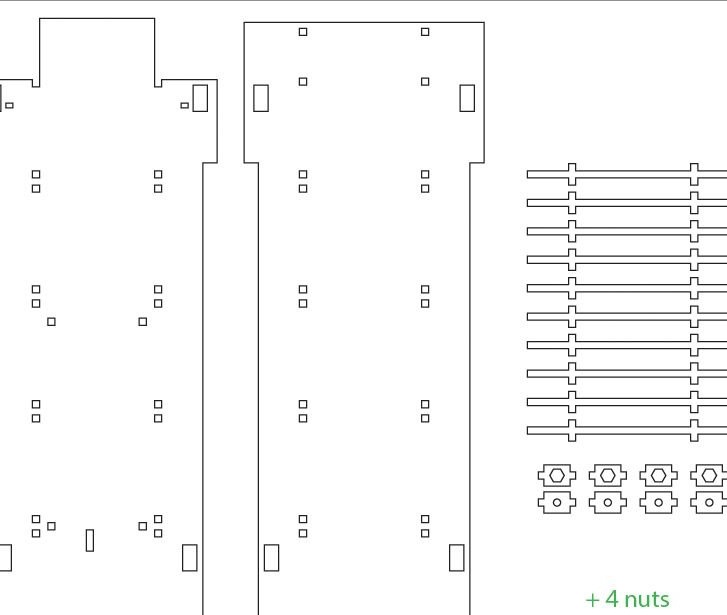
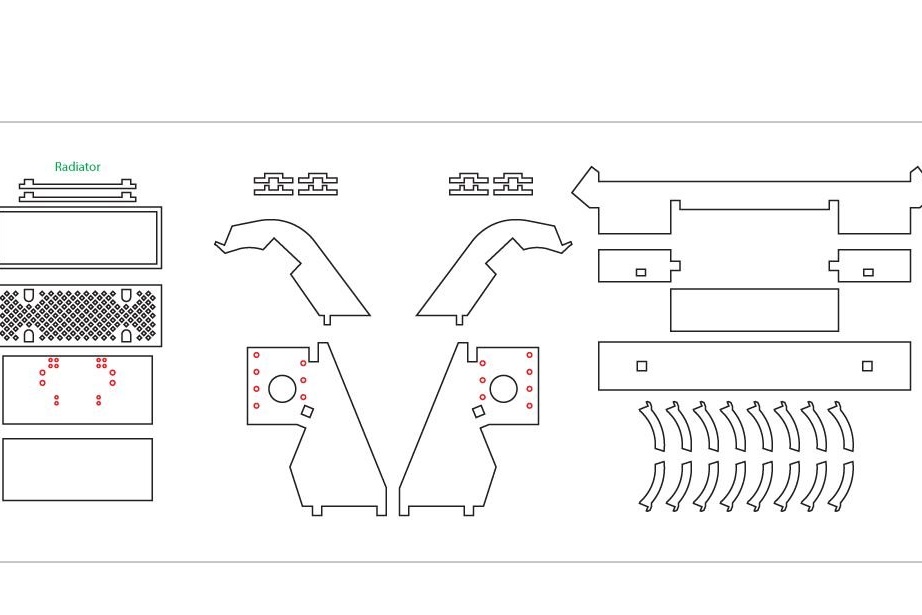
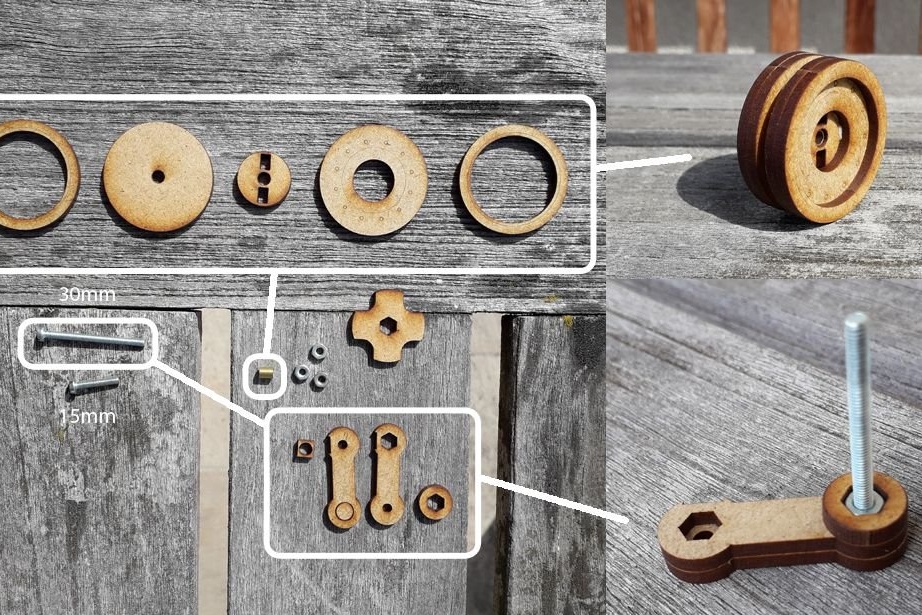
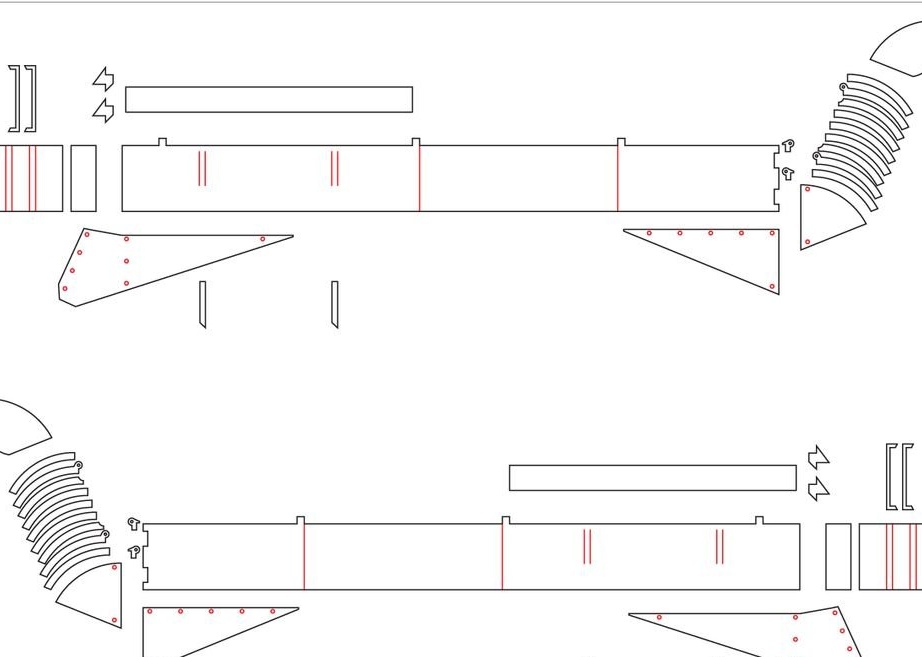
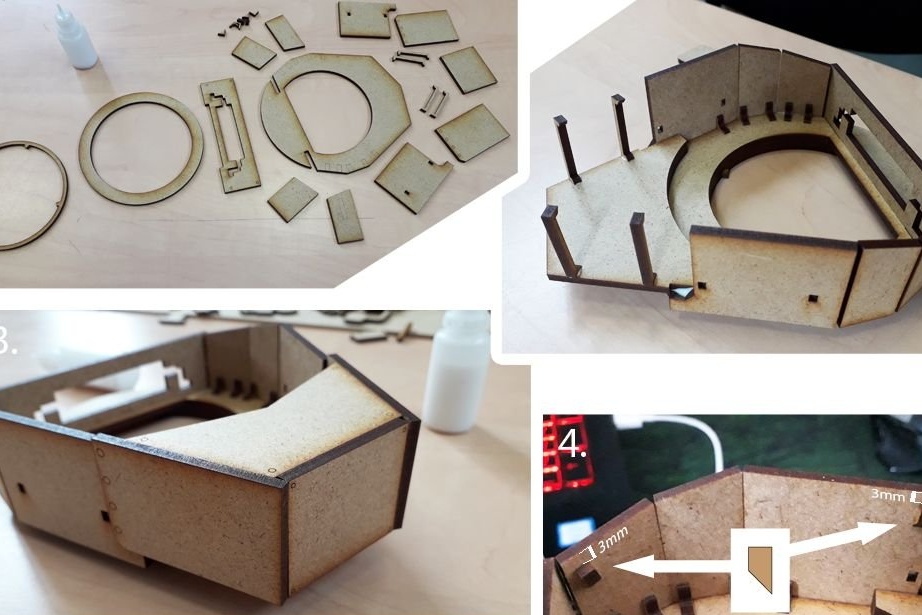
รายละเอียดเคสถูกตัดออกด้วยเครื่องตัดเลเซอร์และไฟล์มีอยู่ที่ ลิงค์นี้.
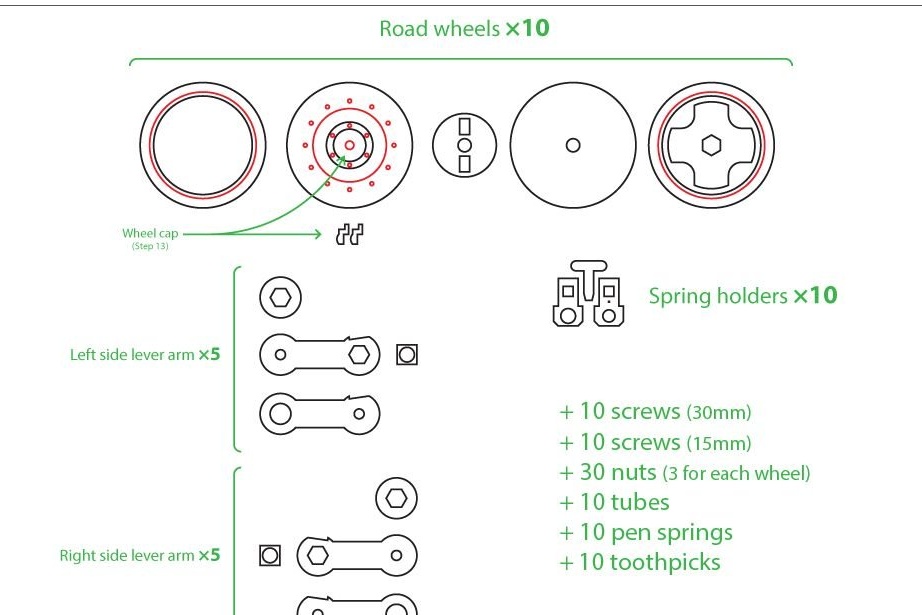
นอกเหนือจากส่วนต่าง ๆ ของร่างกายจะต้องมีสิ่งต่อไปนี้
เครื่องมือและวัสดุ:
- สกรูØ 3 มม.:
-14 ชิ้นยาว 15 มม.
-10 ชิ้นยาว 25 มม.
-10 ชิ้นยาว 30 มม.
- หลอด x20 Ø4มม. (เส้นผ่านศูนย์กลางด้านในØ3มม.)
- ลวดโลหะØ 1 มม.;
-Ø3มม. ร็อดเธรด
- สปริงสำหรับจี้Ø 4.5 มม. และความยาว 30 มม. -10 ชิ้น
- สกรู M4 2 ชิ้น;
-Zubochistki;
คณะกรรมการ -Maketnaya;
ไมโครคอนโทรลเลอร์ ESP8266;
- เชื่อมต่อสายไฟ;
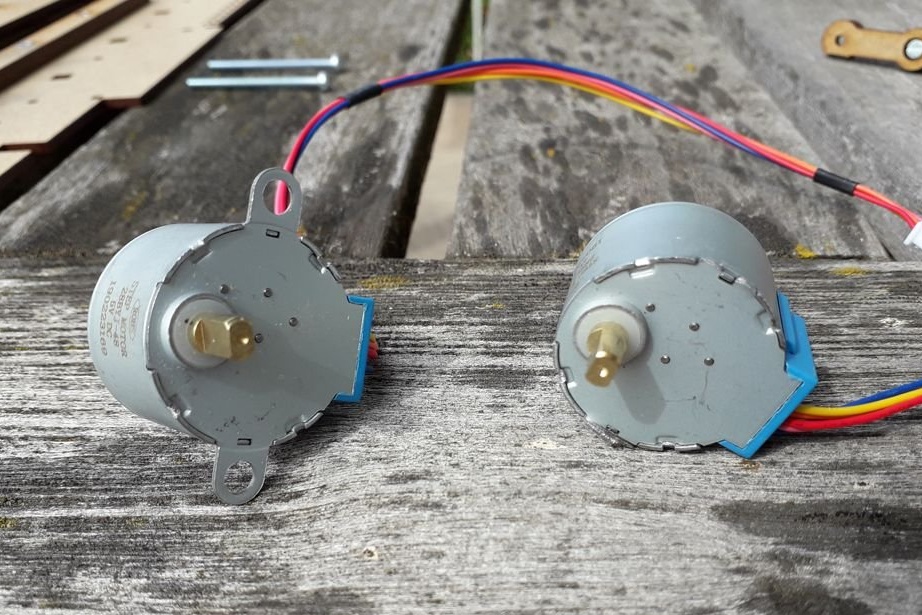
- เครื่องยนต์ 28BYJ-48 พร้อมบอร์ดควบคุม - 2 ชิ้น;
- แบตเตอรี่ 5V;
ขั้นตอนที่หนึ่ง: ทบทวน
ในขั้นตอนนี้ต้นแบบเปิดเผยของเขา รูปแบบ รถถังและยังระบุ ลิงค์ ไปยังไซต์ที่คุณสามารถเห็นรถถังในรูปแบบถอดประกอบ
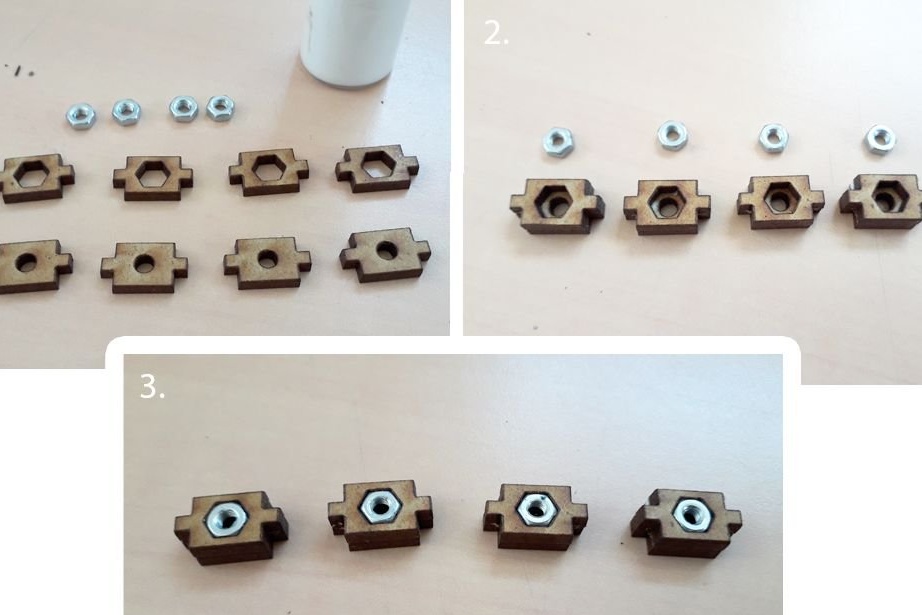
ขั้นตอนที่สอง: ด้านล่าง
เจ้านายเริ่มประกอบจากด้านล่างของถัง ติดตั้งถั่วในเมาท์ เมาท์ด้านข้างของด้านล่าง จัดตั้งสนับสนุน ตั้งค่าเลเยอร์ที่สอง
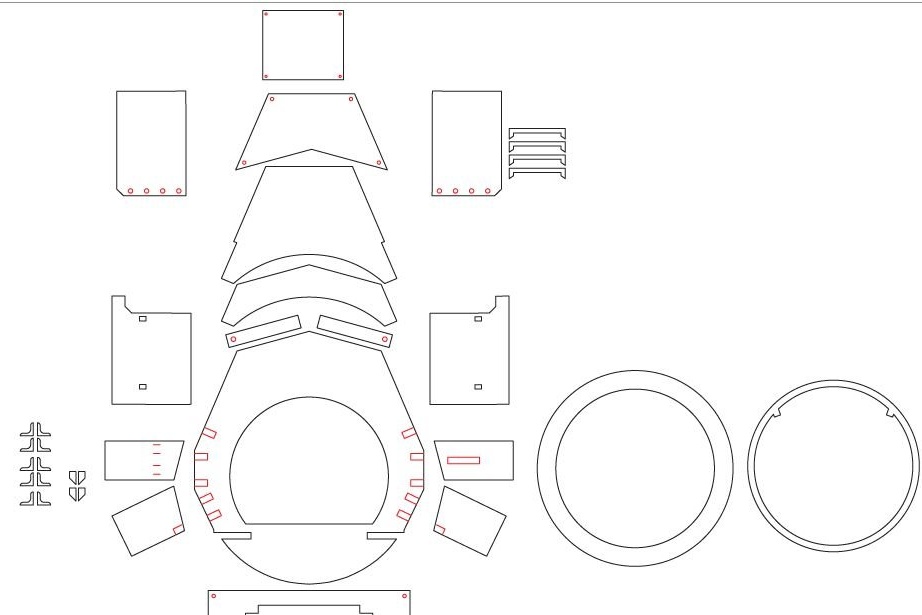
ขั้นตอนที่สาม: กรณี
เริ่มประกอบร่างกาย ประกอบหม้อน้ำและหลัง
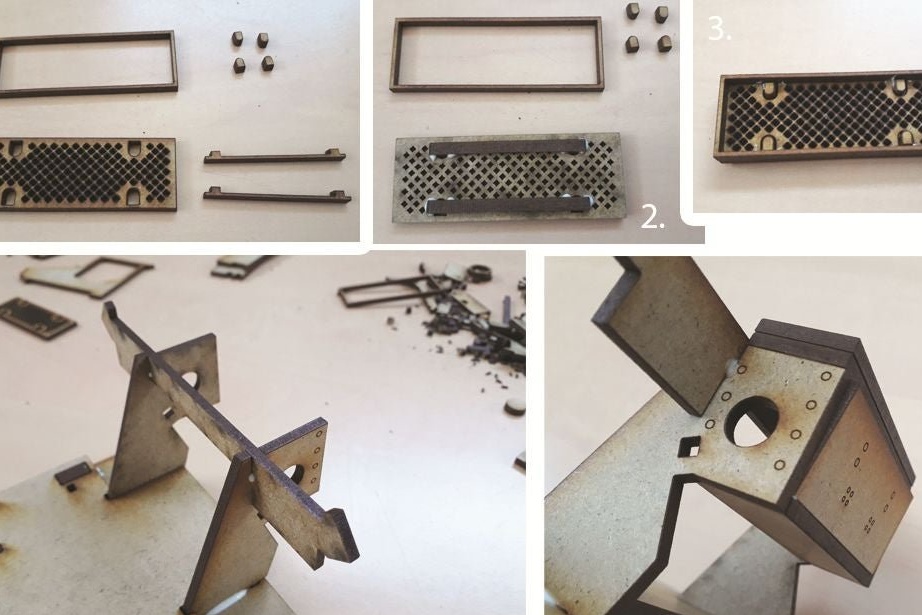
รวบรวมด้านหน้า
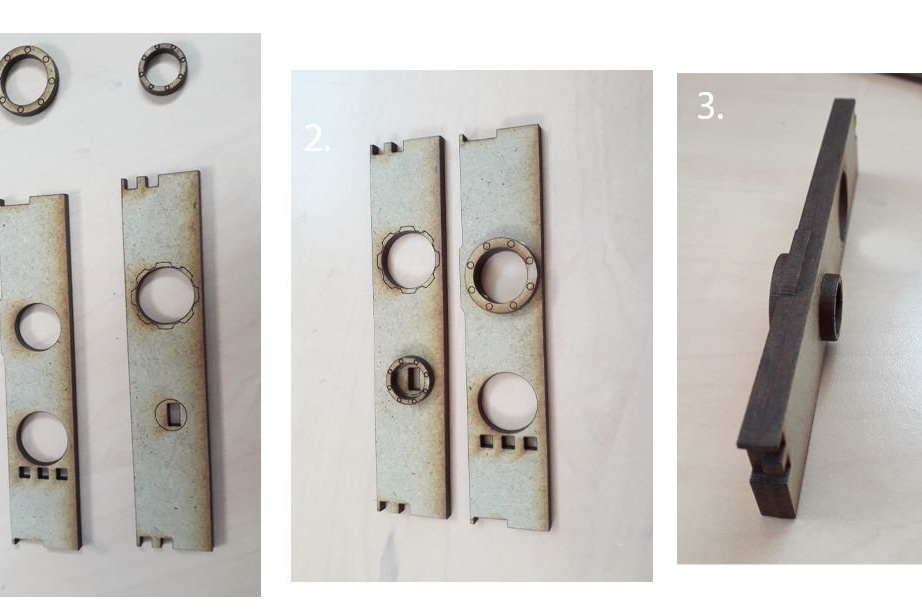
หลังจากใส่ชุดเกราะด้านหน้าตัวถังจะเสร็จสิ้น ส่วนอื่น ๆ จะถูกเกลียวหรือติดกาวโดยไม่ต้องติดกาว
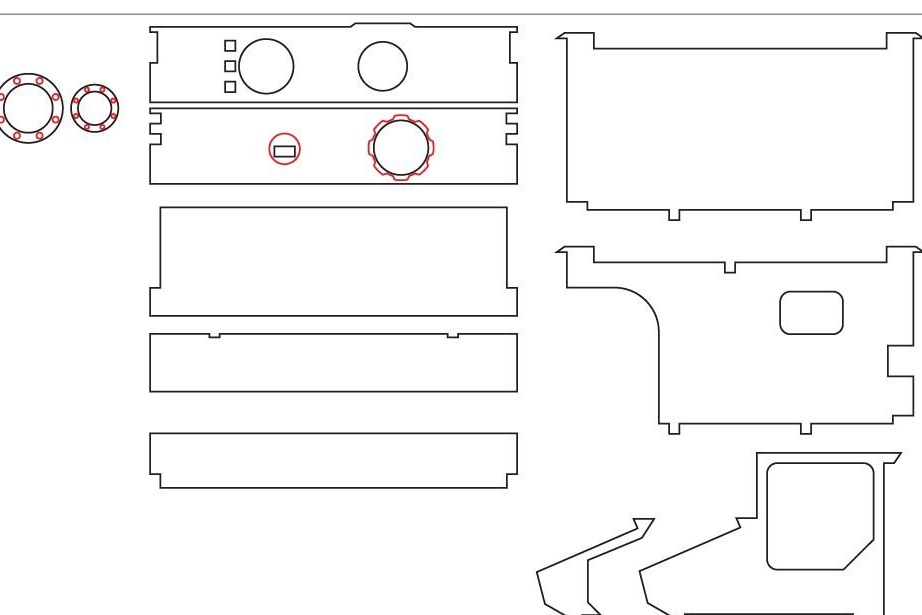
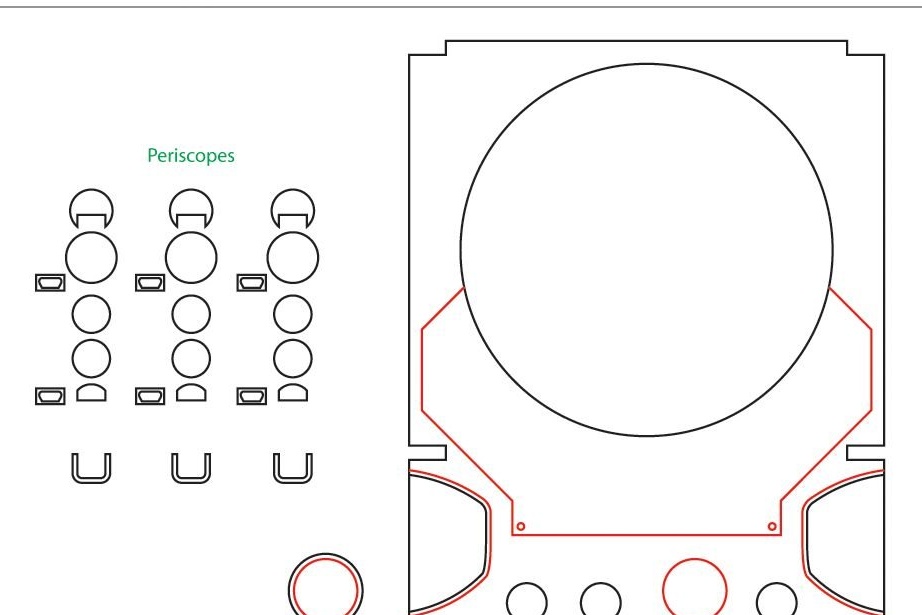
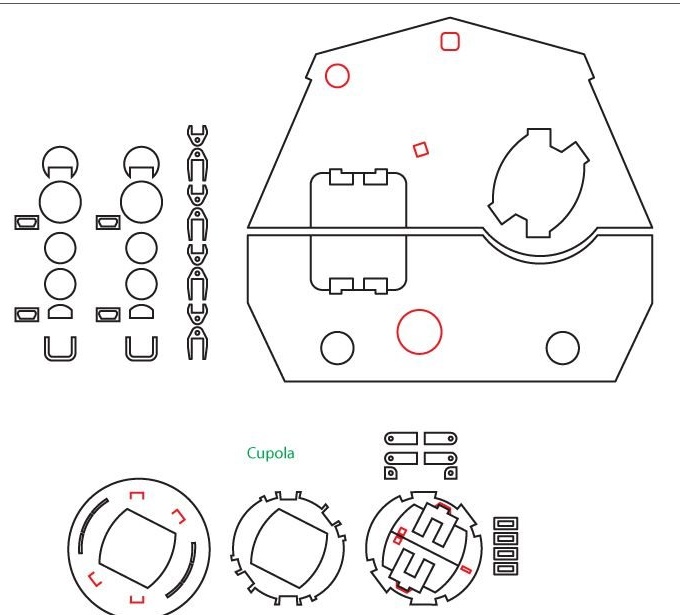
ขั้นตอนที่สี่: หลังคาและ Periscope
ส่วนนี้เป็นส่วนที่ถอดได้ สิ่งนี้ทำเพื่อให้สามารถเข้าถึงภายใน คันโยกกล้องติดตั้งที่ปลายหลังคา กล้องวางไว้บนหลังคา แต่ไม่ยึดติดกับหลังคา

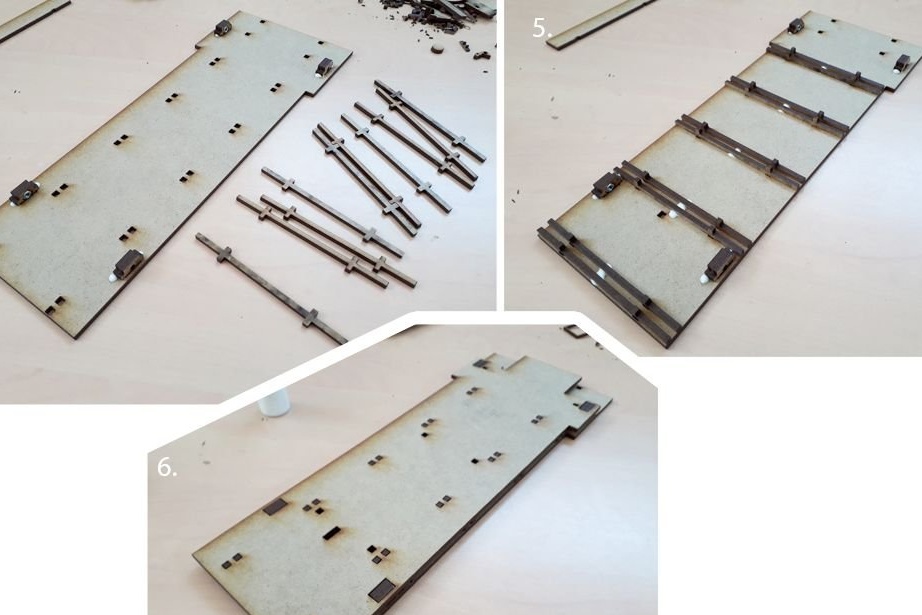
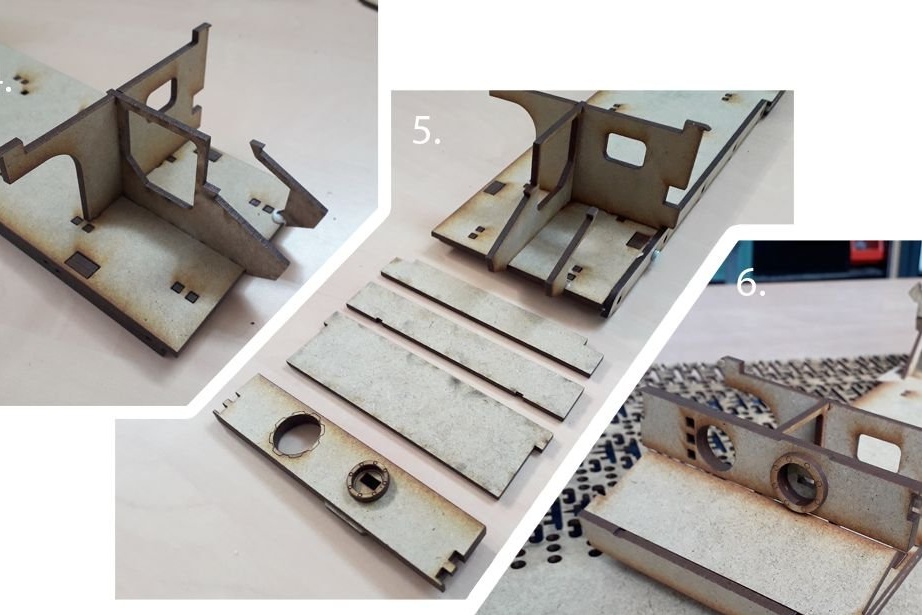
ขั้นตอนที่ห้า: ด้านข้าง
แขนช่วงล่างถูกติดตั้งบนแก้ม มันถูกขันไปที่ก้นสองครั้งด้วยสกรู 15 มม. โดยใช้น็อต 4 ตัวที่ถูกขันในขั้นตอนแรก



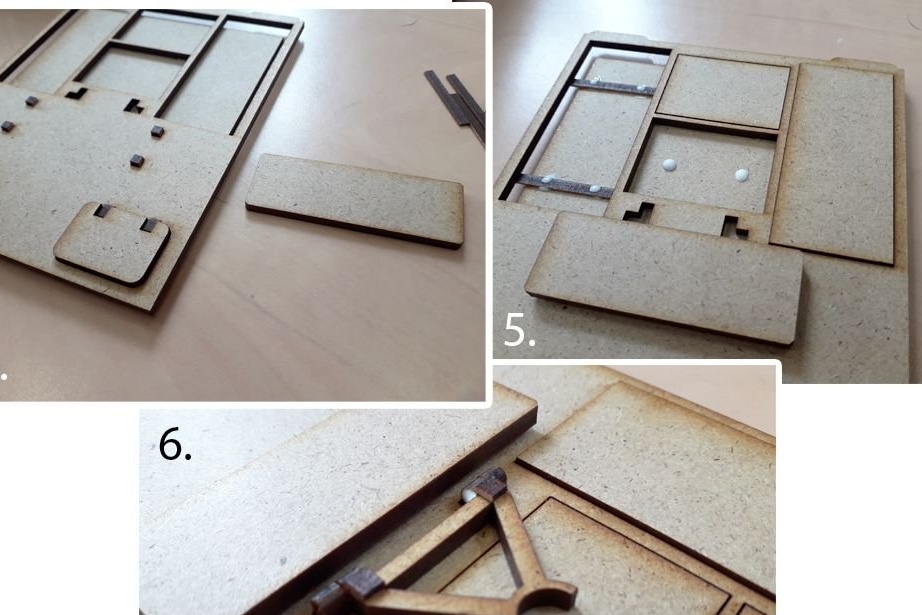
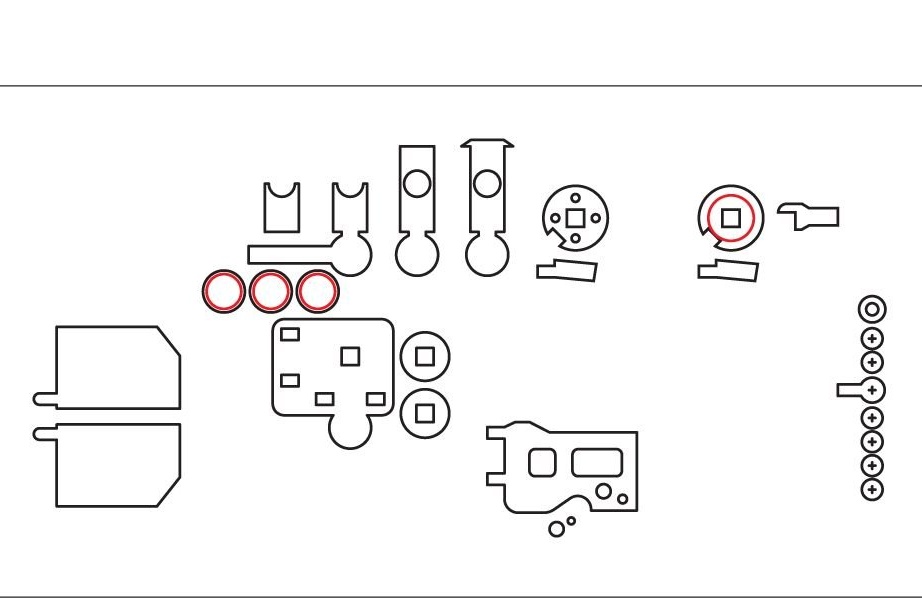
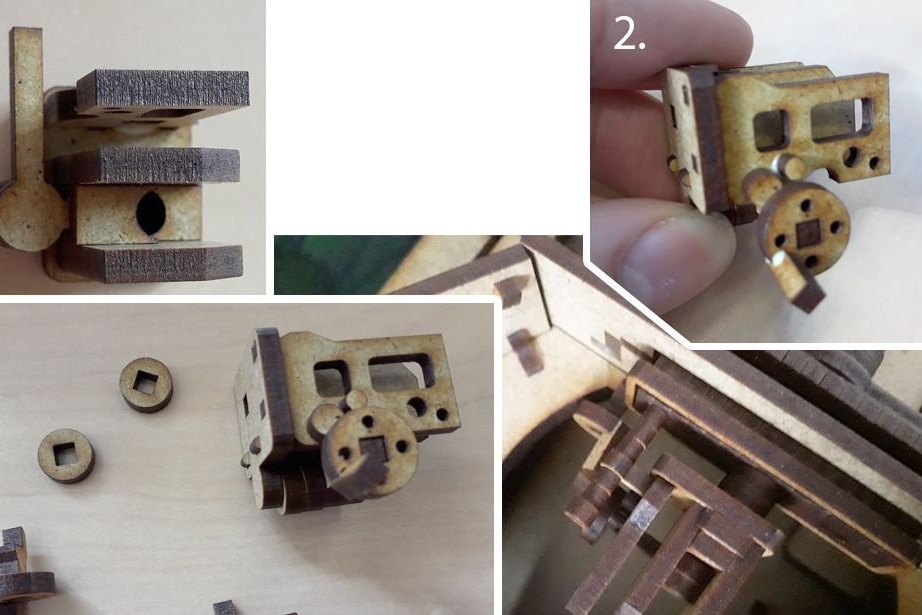
ขั้นตอนที่หก: การระงับ
ประกอบและติดตั้งส่วนประกอบช่วงล่าง ทุกขั้นตอนสะท้อนให้เห็นรายละเอียดในภาพถ่าย ใช้กาวเล็กน้อยกับปลายสปริงเพื่อทำการยึด ข้างในสปริงวางไม้จิ้มฟันชิ้นหนึ่ง สิ่งนี้จะป้องกันไม่ให้สปริงโผล่ออกมา

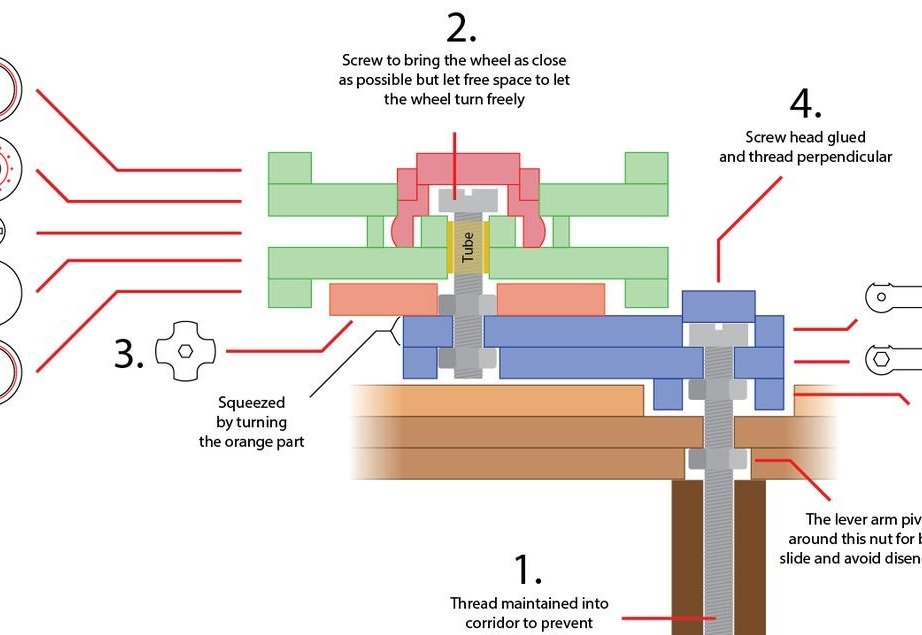
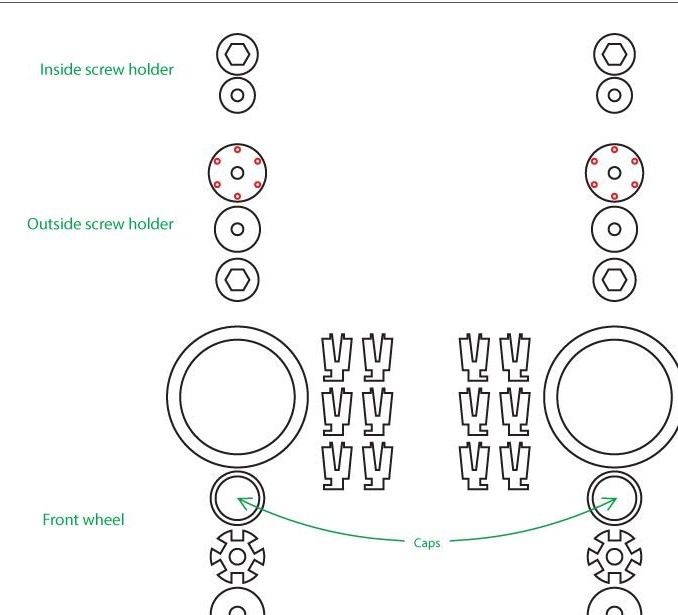
ประกอบและติดตั้งล้อหน้าล่าง ติดตั้งท่อทองเหลืองและสกรูขนาด 20 มม. ในดุมล้อ จากนั้นฮับจะปิดด้วยปลั๊ก

ประกอบและติดตั้งค่อนข้างเป็นล้อ


ประกอบและติดตั้งล้อขับเคลื่อน ล้อเหล่านี้จะเชื่อมต่อกับเครื่องยนต์ที่ติดตั้งในถังของถัง
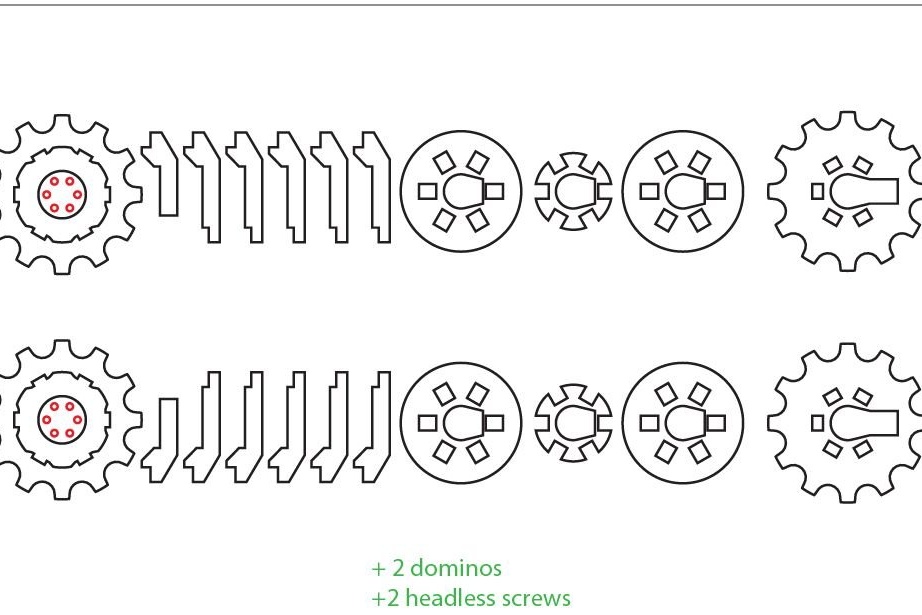
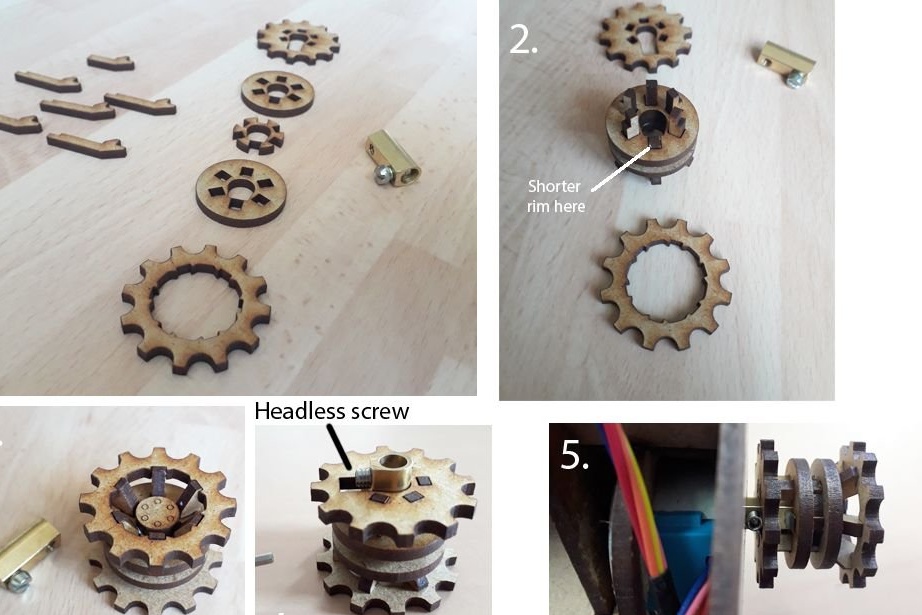
ติดตั้งปลั๊กบนล้อ

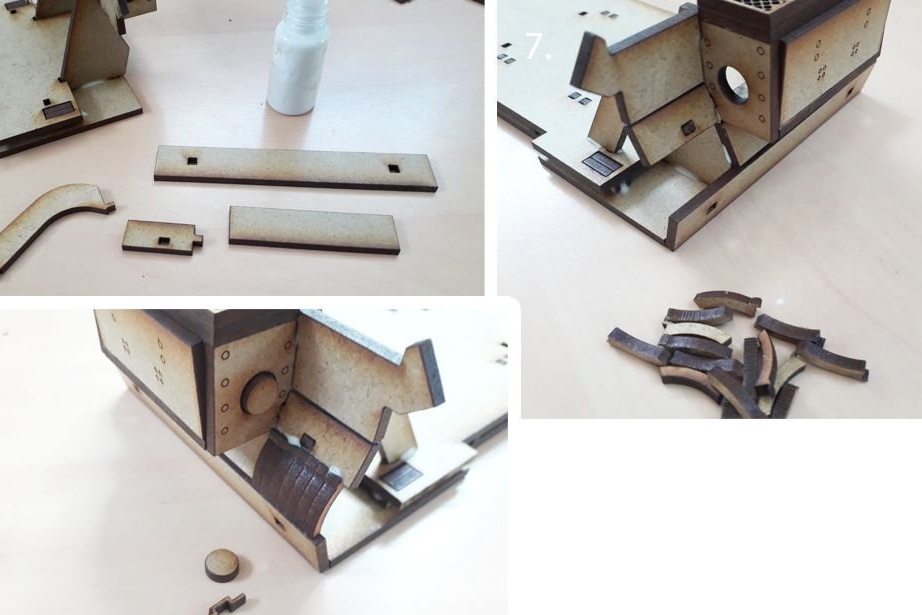
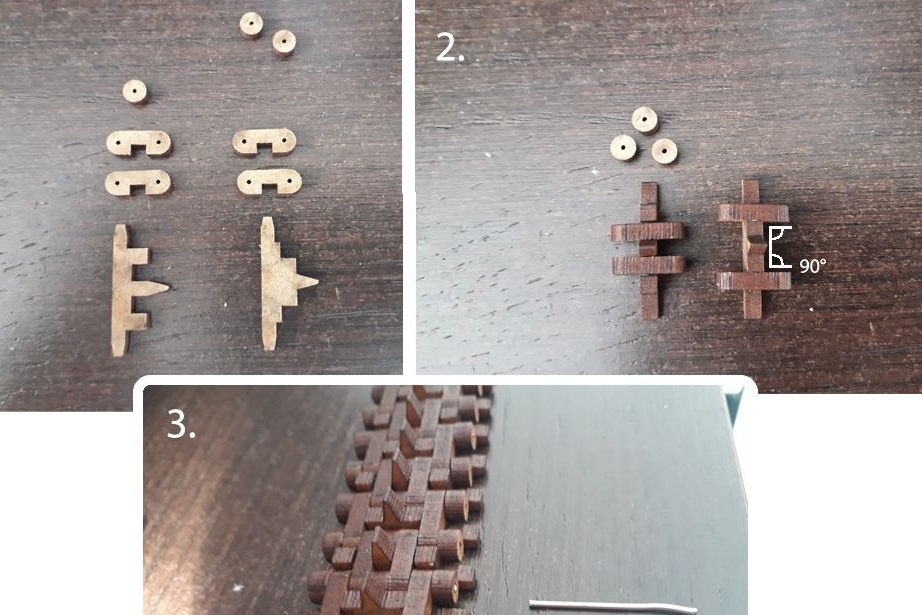
ขั้นตอนที่เจ็ด: ติดตาม
รวบรวมแทร็กของหนอนผีเสื้อ รางยึดกับลวดบาง ๆ ที่ด้านข้างของลวดได้รับการแก้ไขด้วยหมวก
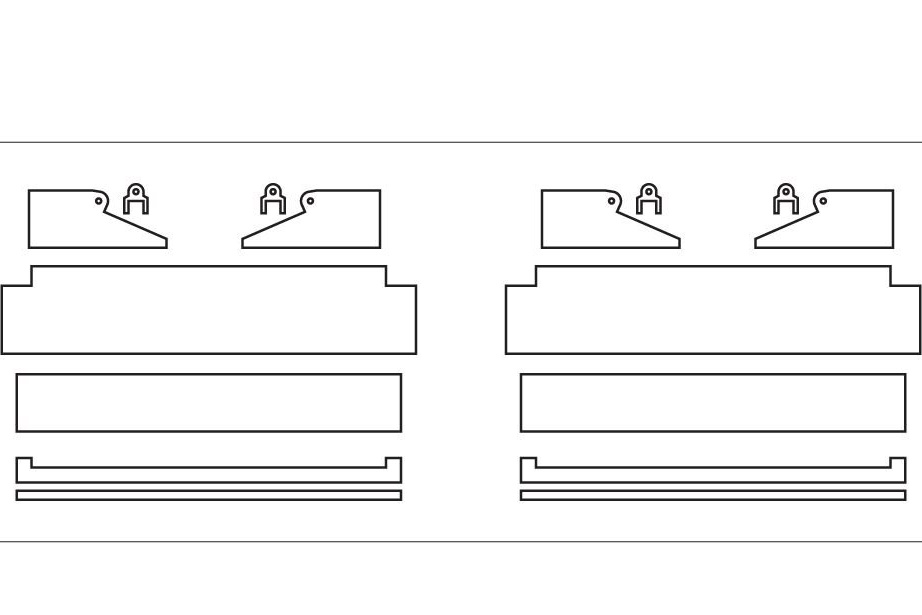
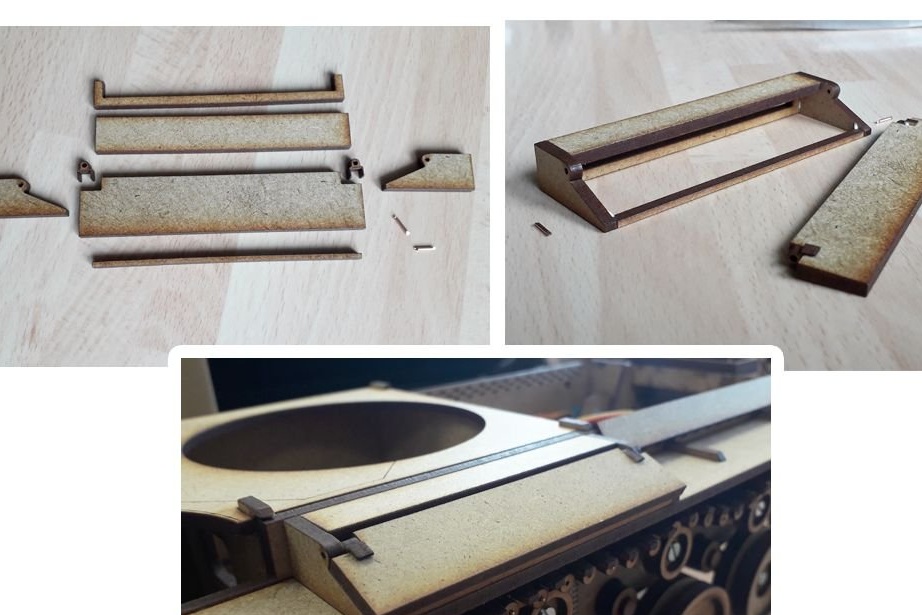
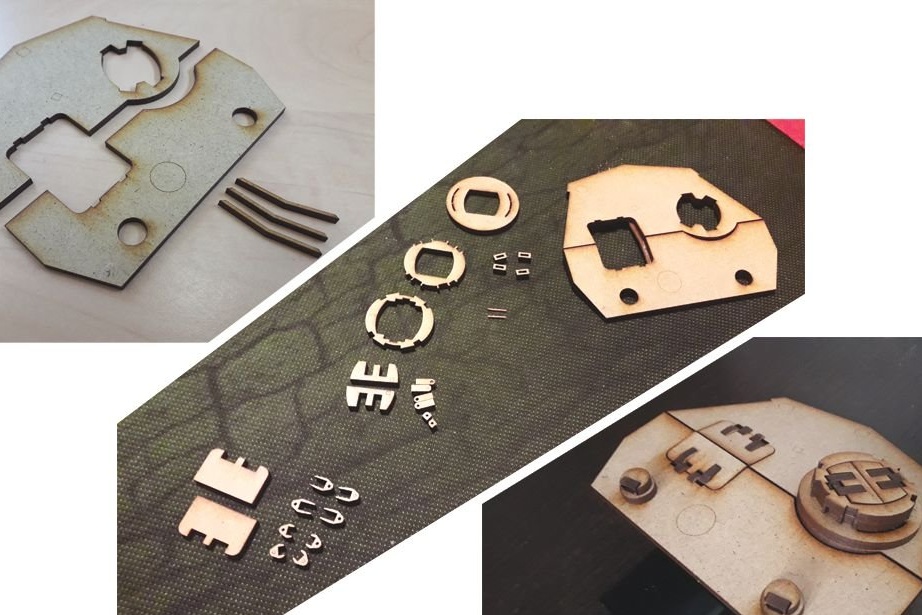
ขั้นตอนที่แปด: การป้องกันสิ่งสกปรกและลิ้นชัก
ติดตั้งโล่ ด้านหน้าของอวัยวะเพศหญิงสามารถเคลื่อนย้ายและสามารถยก


ชุดลิ้นชัก ในฐานะที่เป็นลูปชิ้นส่วนของลวดมีการติดตั้ง
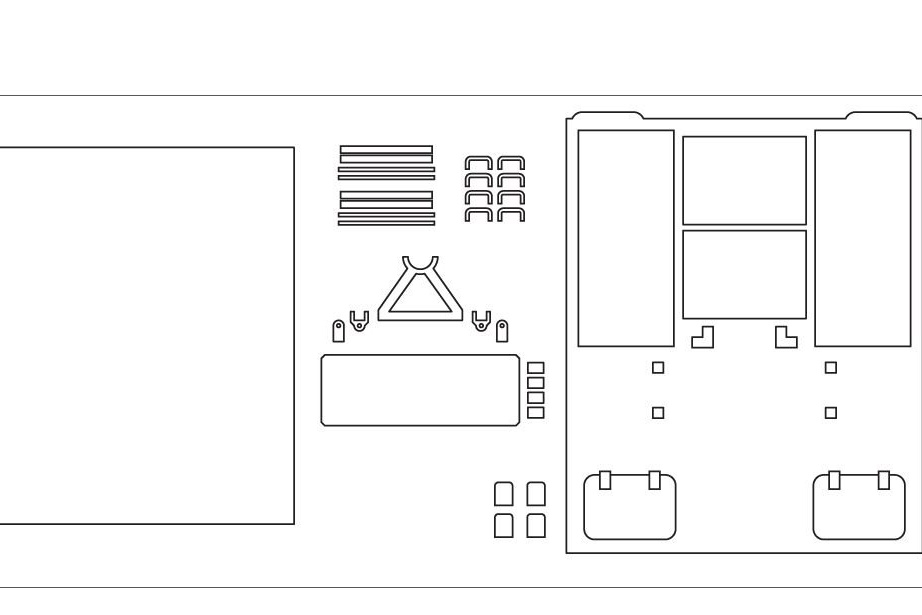
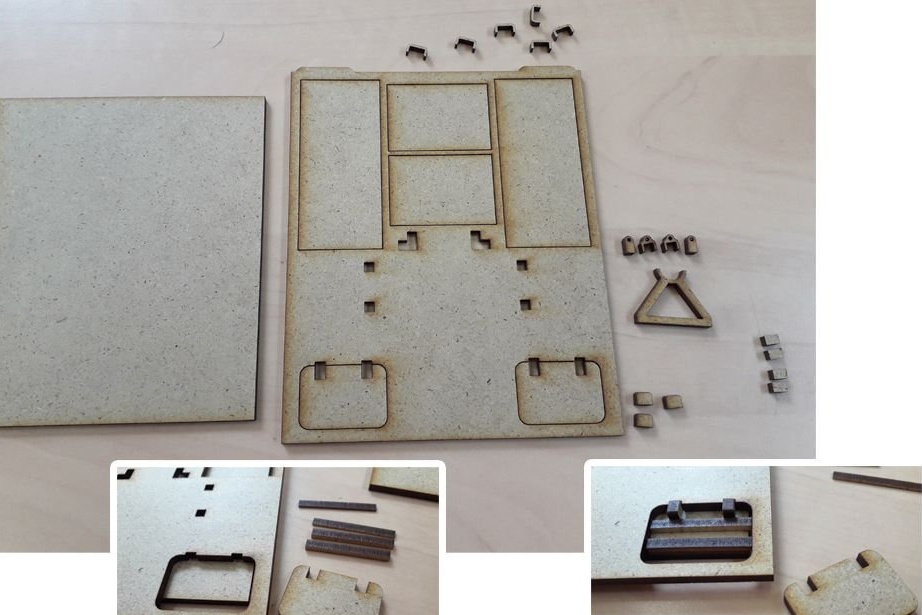
ขั้นตอนที่เก้า: ด้านหลัง
ส่วนนี้ตั้งอยู่ด้านหลังหอคอยและจะครอบคลุมทั้งหมด อิเล็กทรอนิกส์.
ขั้นตอนที่สิบ: หอคอย
รวบรวมยอดหอคอยและกำแพงด้านข้าง
กาวปืนติด
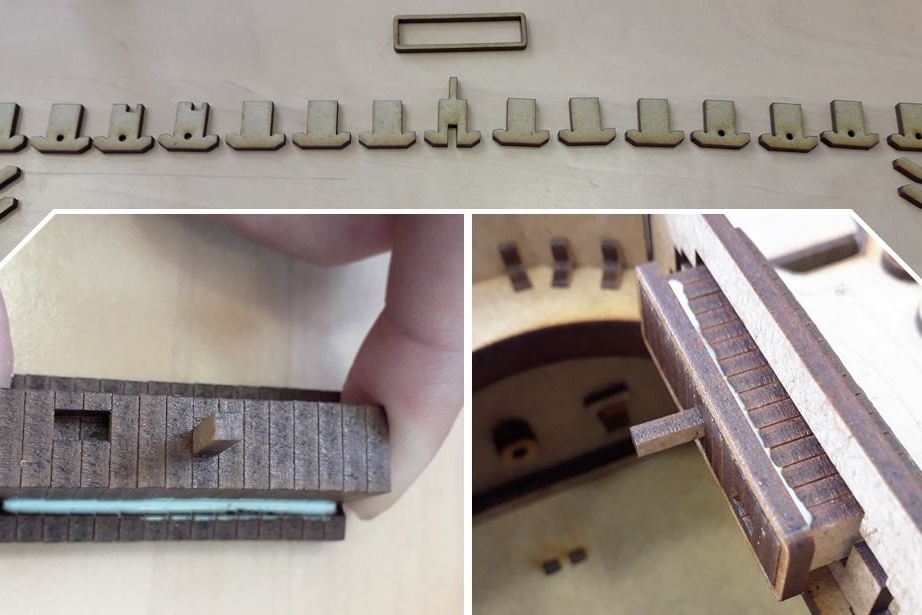
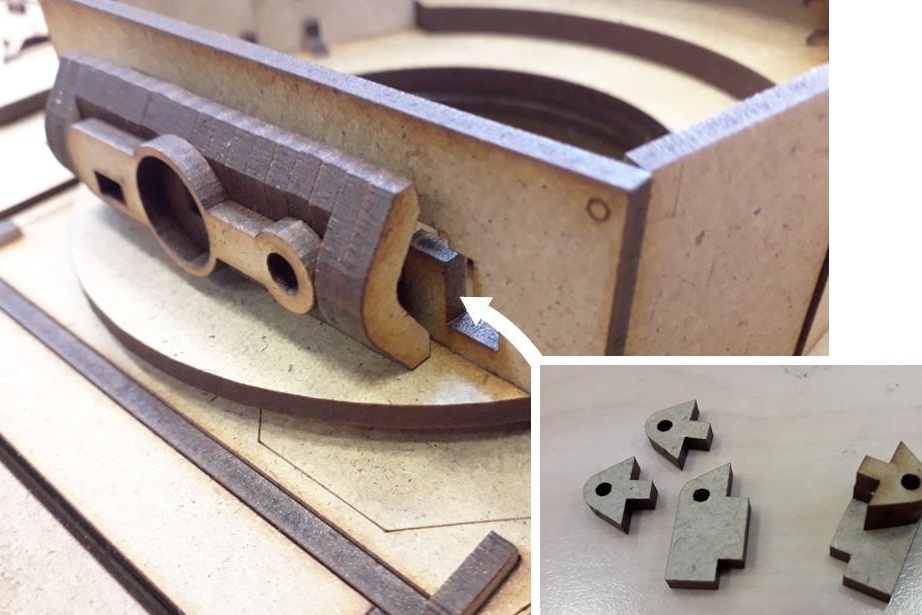
ตั้งค่าการเมาท์ภายในและกลไกการควบคุมปืน

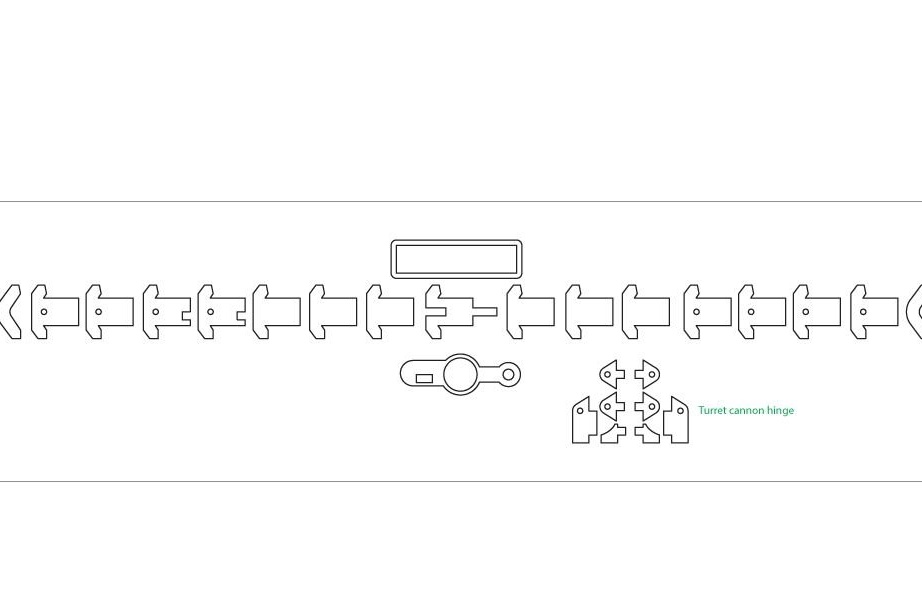
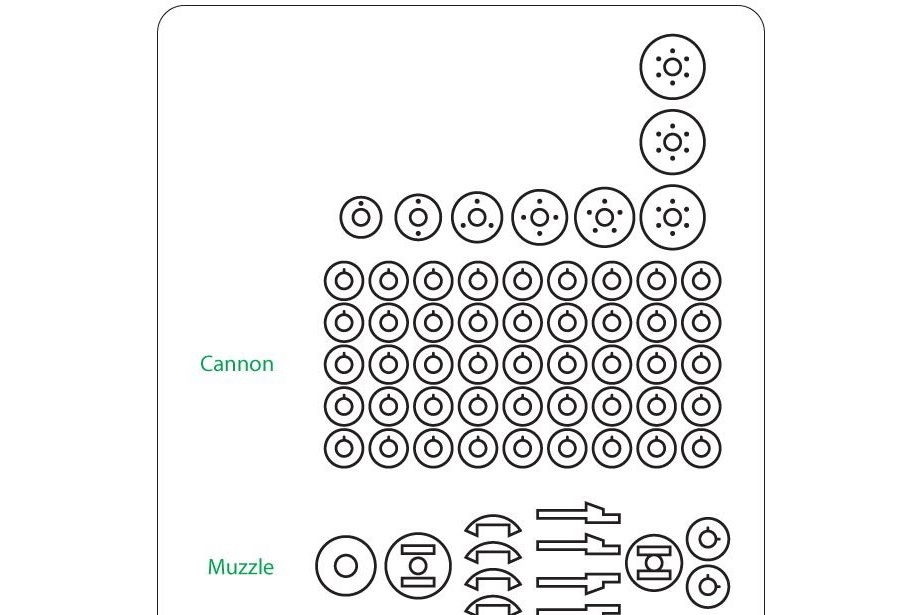
ขั้นตอนที่สิบเอ็ด: ปืน
รวบรวมปืนปืนหลักคือแกนโลหะ รายละเอียดที่เหลืออยู่จะเครียดกับมัน

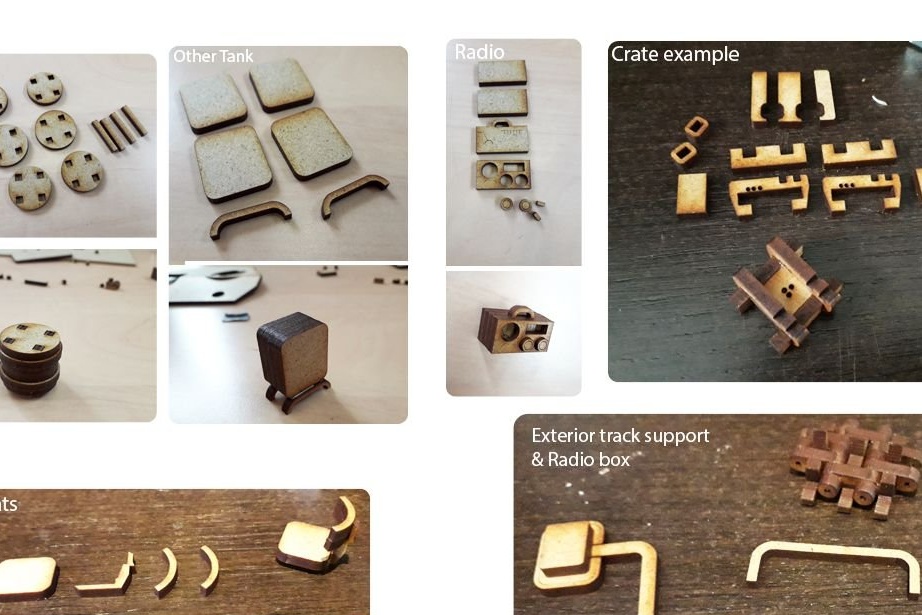
สิบสองขั้นตอน: รายละเอียดเล็กน้อย
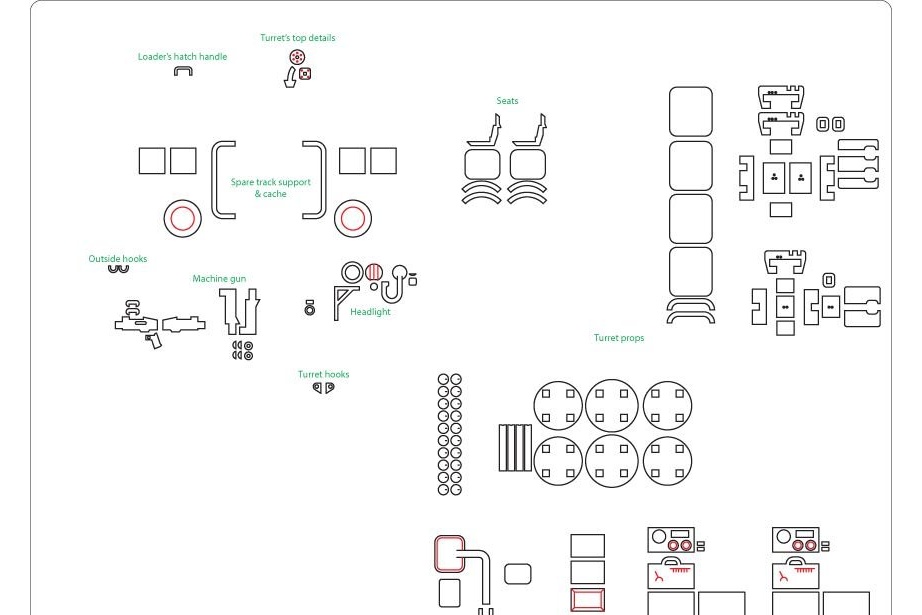
ยึดชิ้นส่วนเล็ก ๆ ของถัง
ข้างในด้านซ้ายมีที่นั่งและปืนกลอยู่ด้านนอกกระบอกปืนกล
ด้านขวาของที่นั่งคนขับ: ที่นั่ง, คันควบคุมและคันเหยียบ, ซันรูฟ
นอก: ตะขอไฟหน้ากล่องกระสุนเชือกลวด ฯลฯ
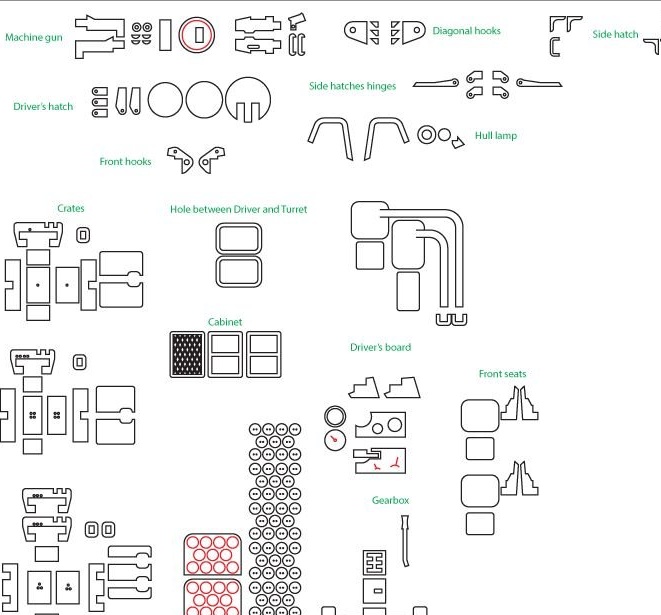
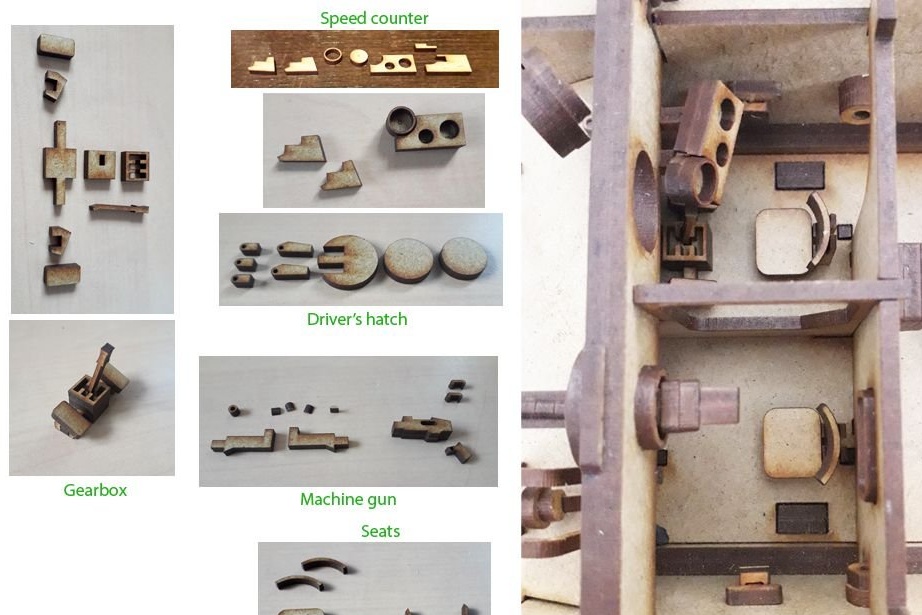

ถังเก็บน้ำอยู่ใต้หอคอย

ขั้นตอนที่สิบสาม: อิเล็กทรอนิกส์
ติดตั้งเครื่องยนต์ ทำการติดตั้งชิ้นส่วนอิเล็กทรอนิกส์ตามแผนภาพ
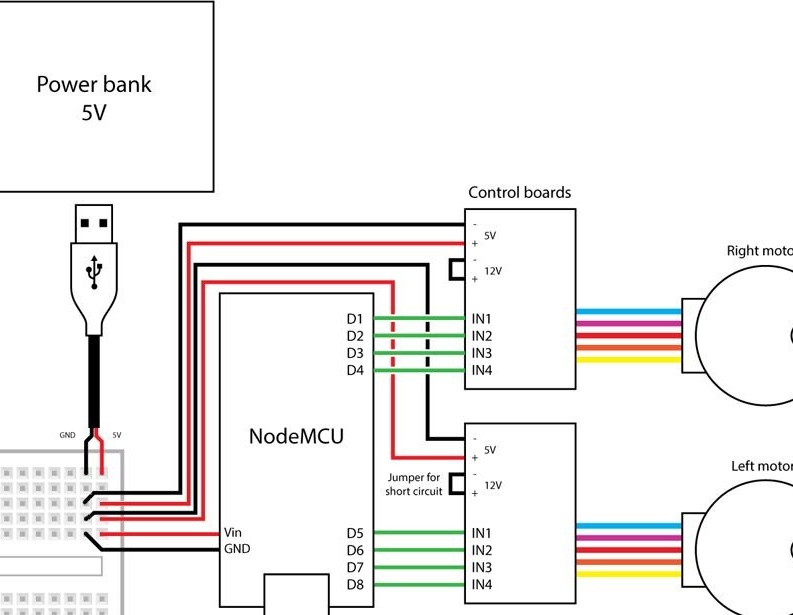

สำหรับการควบคุมแบบไร้สายฉันเลือกคอนโทรลเลอร์ NodeMCU โมเดลถูกควบคุมผ่าน NodeMCU และแอ็พพลิเคชัน Blynk (พร้อมใช้งานบน Android / iOS) แอพนี้ให้ HUD ที่ปรับแต่งได้อย่างเต็มที่เพื่อควบคุมจากสิ่งใด ๆ Arduino หรือโทรศัพท์ iOS ผ่าน WiFi
ดังนั้นหลังจากติดตั้งแอปพลิเคชันสิ่งแรกที่ต้องทำคือสร้างบัญชี
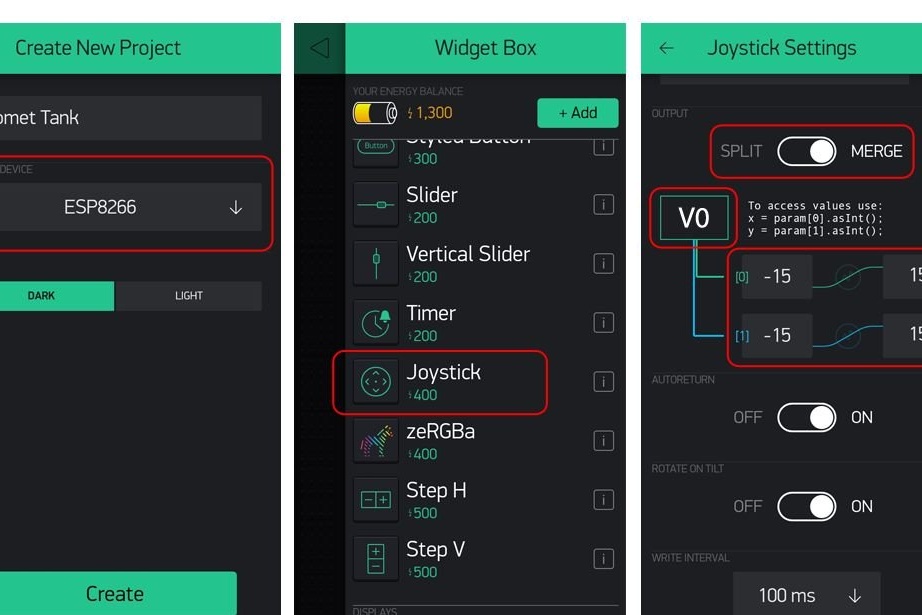
สร้างโครงการใหม่และกำหนด ESP8266 (ชิป NodeMCU) เป็นไมโครคอนโทรลเลอร์และตั้งค่าโหมด WiFi
ทันทีที่คุณเห็น HUD เป็นครั้งแรกให้สร้างจอยสติก ส่งข้อมูลแท่งควบคุมไปที่หมุดเสมือน V0 ของโหนด
เมื่อคุณสร้างจอยสติกแล้วให้คลิกเพื่อเปิดการตั้งค่า ที่ตำแหน่ง X และ Y ให้ตั้งค่าช่วงจาก -15 ถึง 15
ติดตั้งไลบรารี
ก่อนอื่นดาวน์โหลดไลบรารี Stepper2 ที่นี่: https://github.com/udivankin/Stepper2
ห้องสมุดนี้เป็นตัวเลือกที่ดีสำหรับสเต็ปเปอร์มอเตอร์ราคาถูกเช่นที่มาสเตอร์ใช้ จัดการเฟสเครื่องยนต์ได้ดีขึ้นและให้แรงบิดที่ดีขึ้น หลังจากดาวน์โหลดไฟล์. zip ให้ติดตั้งจากซอฟต์แวร์ Arduino: Sketch> Include Library> เพิ่ม. ZIP Library ... และเลือก
จากนั้นหากคุณไม่เคยแฟลช NodeMCU มาก่อนคุณจำเป็นต้องใช้คอมพิวเตอร์เพื่อจดจำ Arduino IDE มีตัวจัดการบอร์ดซึ่งติดตั้งไดรเวอร์ที่ถูกต้อง
คัดลอกบรรทัดต่อไปนี้:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonเปิดการตั้งค่าและวางลงใน URL บันทึกการตั้งค่าและไปที่ตัวจัดการคอนโทรลเลอร์ในเครื่องมือ> บอร์ด> ตัวจัดการบอร์ด การ์ด ESP8266 จะต้องปรากฏที่ท้ายรายการ ตัวช่วยสร้างเลือกรุ่น 2.5.0 พร้อม IDE ใน 1.8.9
คุณต้องมีไลบรารี Blynk ซึ่งสามารถดูได้ที่ Sketch> Include Library> Manage libraries ... จากนั้นค้นหา Blynk ในช่องค้นหา
ไปที่การตั้งค่าโครงการและส่งโทเค็นไปยังที่อยู่ของคุณซึ่งเป็นสตริงขนาดใหญ่ที่อนุญาตให้โทรศัพท์ของคุณรับรู้ NodeMCU เมื่อเปิดใช้งาน คัดลอกโทเค็นจากจดหมายที่ได้รับเมื่อเร็ว ๆ นี้และวางลงในอาร์เรย์รับรองความถูกต้อง
ตอนนี้คุณสามารถติดตั้งเฟิร์มแวร์ได้แล้ว
Comet.ino
ทุกอย่างพร้อมตอนนี้คุณสามารถเพลิดเพลินกับการทำงานของคุณ