

อันนี้ ยานพาหนะภูมิประเทศทั้งหมด ด้วยการออกแบบเฟรมเฟรมให้ทิปทำโดยใช้สองเครื่องยนต์ เนื่องจากเครื่องยนต์ทั้งสองมุ่งเป้าไปที่ 1 กระปุกยานพาหนะทุกพื้นที่จึงมีความสามารถในการขับขี่ด้วยเครื่องยนต์เดียวเท่านั้นแม้ว่ามันจะลดกำลังของมันลงก็ตามด้วยวิธีการนี้หากเครื่องยนต์หนึ่งล้มเหลว
วัสดุและส่วนประกอบที่ใช้ในการก่อสร้างยานพาหนะทุกพื้นที่:
1) สองเครื่องยนต์จาก รถจักรยานยนต์ โลกและ IL
2) ปั๊มไฟฟ้าจากเนื้อทราย
3) พัดลมจาก vaz 2106
4) เฟืองจากไดรฟ์สุดท้ายของ T-40
5) ดาวสำหรับฟัน 12 และ 72 ซี่
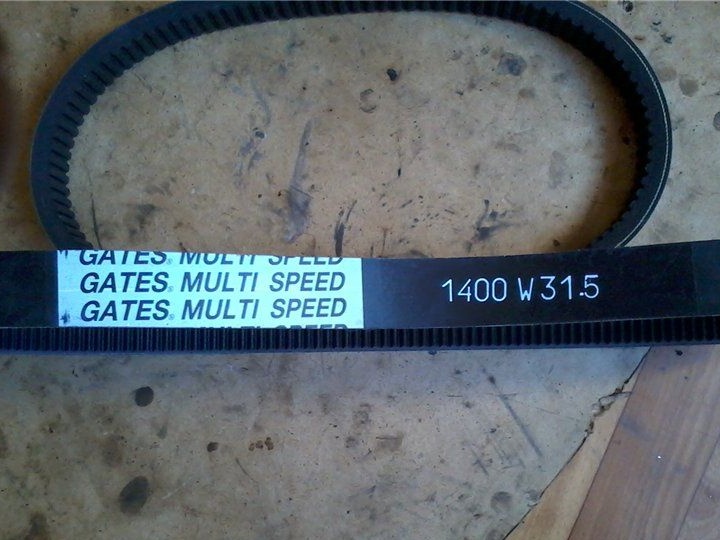
6) โซ่จากรถจักรยานยนต์ Izh
7) กล้องจาก K-700
8) เกียร์จากสตาร์ทเตอร์ Kraz
9) การจุดระเบิดจาก vaz 2108
10) บานพับจาก cardan kraza
ให้เราพิจารณารายละเอียดเพิ่มเติมเกี่ยวกับขั้นตอนของการสร้างยานพาหนะทุกพื้นที่และโหนดหลัก
มุมมองด้านข้างของยานพาหนะภูมิประเทศทั้งหมด:
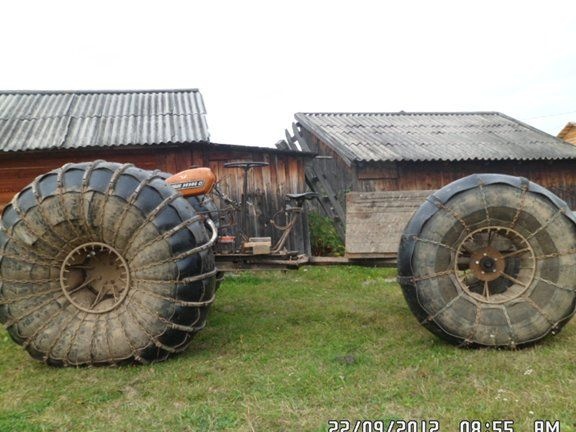
ดังนั้นยานพาหนะทุกพื้นที่จะมองไปข้างหน้า:

ล้อออกแบบทำเอง:

โซ่ที่ใช้กับตะขอ:

มีการติดตั้งหม้อน้ำรวมถึงปั๊มและพัดลม:

พวงมาลัยถูกติดตั้งบนยานพาหนะทุกพื้นที่:


และนี่คือเครื่องยนต์ทุกพื้นที่พร้อมด้วยเซ็นเซอร์ฮอลล์และม่าน:

นี่คือรูปภาพของโหนดที่เชื่อมต่อหน่วยไดรฟ์เข้ากับรถเข็น:

นอกจากนี้ยังมีส่วนนำที่สอง ในการเชื่อมต่อจำเป็นต้องใช้ส่วนต่อไปนี้:
ยานพาหนะภูมิประเทศทั้งหมดสองเครื่องยนต์ถูกถอดประกอบหนึ่งกระปุกเหลืออยู่:

การออกแบบของยานพาหนะทุกพื้นที่ได้รับการออกแบบใหม่เป็นหนึ่งเครื่องยนต์สำหรับแต่ละส่วนของไดรฟ์ตามกระปุกเกียร์


อย่างที่คุณเห็นพัดลมโดยไม่ต้องมีท่อ แต่การทำงานของเครื่องยนต์ไม่จำเป็นต้องมีการรวม เมื่อเดินทางในเส้นทางที่ยากจะมีการติดตั้งเคส:

อัตราทดเกียร์ทั้งหมดคือ 280 กับดาว 70 ฟัน:

เมื่อทำการทดสอบในน้ำยานพาหนะทุกพื้นที่จะพุ่งไปตามขอบของขอบล้อ
ครึ่งหลังที่สองของยานพาหนะทุกพื้นที่ถูกประกอบขึ้นและผู้เขียนก็ดำเนินการติดตั้งพวงมาลัยและเครื่องยนต์

และนี่คือโหนดการเชื่อมต่อของสองส่วนนี้:

ในการสร้างอุปกรณ์บังคับเลี้ยวนั้นใช้จากมงกุฎมู่เล่ ก้านโยกมีขนาดเล็กดังนั้นการควบคุมจึงไม่สะดวกที่สุด ในครึ่งแรกทางรถไฟเป็นแบบโฮมเมดดังนั้นคันโยกจึงมีมากเป็นสองเท่า

ติดตั้งกระปุกเกียร์ไม่สามารถติดดาวดวงหนึ่งสำหรับ 70 ฟันเนื่องจากมีพื้นที่ไม่เพียงพอ ดังนั้นดาวจึงถูกใช้สำหรับฟัน 53 ซี่จากรถจักรยานยนต์มันยังคงให้อัตราทดเกียร์ที่เท่ากันทั้งสองส่วนของยานพาหนะทุกพื้นที่หรือสร้างเพลากลางและติดตั้งดาวฤกษ์บนฟัน 18 ซี่

เมื่อเดินทางผู้โดยสารที่นั่งในครึ่งหลังของยานพาหนะทุกพื้นที่จะต้องมีความเร็วของเครื่องยนต์ที่สองนอกจากนี้เขาจะสามารถควบคุมแก๊สได้แม้ว่าคนขับในครึ่งแรกจะมีการควบคุมโดยทั่วไปเท่านั้น
ถังแก๊สติดตั้งอยู่บนชั้นวางแยกต่างหากเพื่อความสะดวกยิ่งขึ้นและเพื่อไม่ให้มีการส่งการสั่นสะเทือนของเครื่องยนต์
นี่คือลักษณะของยานพาหนะที่รวมภูมิประเทศทั้งหมด:

เขาอยู่ด้านบน:

มุมมองด้านหลัง:

รายละเอียดเพิ่มเติมหน่วยการแตกหักของเฟรมยานพาหนะทุกพื้นที่:

ในเวลาเดียวกันผู้เขียนสร้างยานพาหนะท


ได้รับกล้องสำหรับยานพาหนะทั้งภูมิประเทศ:

สำหรับการเปรียบเทียบกล้องจากขอบสามารถมองเห็นได้ใกล้เคียงตอนนี้ผู้เขียนมีอัตรากำไรที่เหมาะสมในกรณีที่เกิดความเสียหายต่อเสา
ต่อไปเราจะวิเคราะห์การวิเคราะห์หลักของยานพาหนะทุกพื้นที่
เมื่อเดินทางจากการสั่นสะเทือนสายยางก็กระโดดลงมาและสารต้านการแข็งตัวก็รั่วไหลน้ำไหลเข้ามาแทนที่และการจราจรก็กลับมา แต่น่าเสียดายที่เครื่องยนต์ติดขัดจากด้านหน้าจากจุดนี้

สลักเกลียวสองอันหัก 10 ตัวสลักเกลียวอีกสองอันก็งอเป็นผลมาจากการแตก มุมก็งอเหมือนที่เห็นในภาพ


UAZ ถูกเรียกจากหมู่บ้านซึ่งนำรถเข็นมา รถเข็นถูกเชื่อมต่อกับส่วนการทำงานของยานพาหนะทุกพื้นที่และผู้เขียนขี่มัน ส่วนที่ไม่ทำงานถูกลากโดย UAZ ไปยังไซต์ซ่อมแซมในหมู่บ้าน

การผจญภัยของผู้แต่งไม่ได้สิ้นสุดที่นั่นเพราะในระดับที่ข้ามล้อบนรถเข็นลดลง แต่เส้นทางยังคงดำเนินต่อไปบนล้อเดียว


หลังจากวิเคราะห์เครื่องยนต์มันกลับกลายเป็นว่าสาเหตุของลิ่มของเครื่องยนต์ไม่ใช่น้ำแทนที่จะเป็นสารป้องกันการแข็งตัว แต่ไม่ใช่น้ำมันเบนซินเจือจางซึ่งผู้เขียนเทลงในถังก่อนการเดินทาง เนื่องจากในถังทั้งสองมีก๊าซมาก่อนหน้านี้เครื่องยนต์ไม่ติดขัดทันทีและเครื่องยนต์ที่สองไม่สามารถติดขัดได้เลย
รูปแบบการส่งผ่านภูมิประเทศทั้งหมด:
รูปภาพเพิ่มเติมบางส่วน:




















เครื่องยนต์ถูกทำซ้ำสำหรับการระบายความร้อนด้วยของเหลว กล่องเกียร์ทำโดยผู้เขียนเองโดยใช้เกียร์จาก VAZ 2106 พวงมาลัยของยานพาหนะทุกพื้นที่ค่อนข้างแน่นเนื่องจากแกนที่มั่นคง การส่งกำลังมีโซ่ขับ มีการติดตั้งเซ็นเซอร์ฮอลล์สองตัว: หนึ่งอันสำหรับการขับเคลื่อนไปข้างหน้าและอันที่สองสำหรับการเคลื่อนที่ถอยหลังเนื่องจากยานพาหนะทุกพื้นที่ไม่มีเกียร์ถอยหลัง ในการย้ายกลับคุณต้องปิดเครื่องยนต์และสตาร์ทด้วยเซ็นเซอร์ฮอลล์ที่สองในทิศทางตรงกันข้าม
ล้อที่ใช้คือกล้อง K-700 ซึ่งห่อด้วยสายพาน
การกวาดล้างพาหนะทุกพื้นที่คือ 50 เซนติเมตร
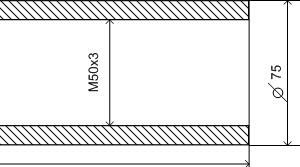
การควบคุมพวงมาลัยทำได้โดยผู้แต่งเอง ในการทำเช่นนี้เขาใช้เกียร์จาก kraz และแร็คเกียร์แบบทำเองที่บ้าน บานพับจาก kraz kardan ก็มีส่วนเกี่ยวข้องด้วยเช่นกันซึ่งสายฟ้า m50 พร้อมน็อตแบบเกลียวเชื่อม มุมจากโบกี้หลังเชื่อมกับน็อต ผู้เขียนไม่ได้ติดตั้งตัว จำกัด การหมุนดังนั้นรถเข็นสามารถหมุนได้ 360 องศา ผู้เขียนคาดว่าจะเป็นผู้นำอีกส่วนหนึ่งของยานพาหนะทุกพื้นที่ซึ่งเขาจะติดแทนรถเข็นและต่อมาได้รับยานพาหนะทุกพื้นที่พร้อมระบบขับเคลื่อนสี่ล้อ
การออกแบบนี้มีข้อเสียคือไม่สามารถเปลี่ยนเกียร์ได้อย่างสะดวก แม้ว่ายานพาหนะทุกพื้นที่จะไม่ต้องการการเปลี่ยนเกียร์บ่อยครั้งตั้งแต่ครั้งแรกและครั้งที่สองที่ใช้เป็นหลักเนื่องจากล้อขนาดใหญ่ยานพาหนะทุกพื้นที่จะเคลื่อนที่อย่างรวดเร็วเพียงพอภายใต้เงื่อนไขใด ๆ ของการติดตามแม้ในความเร็วที่สอง
ยานพาหนะทุกพื้นที่มีน้ำหนัก 700 กิโลกรัม แต่ก็สามารถอุ้มน้ำได้ง่ายเนื่องจากกล้อง Krazov ให้ความสามารถในการว่ายน้ำได้อย่างยอดเยี่ยม
ผู้เขียนยานพาหนะทุกพื้นที่พร้อมชื่อเล่น "Petrovich11" จาก Khanty-Mansi Autonomous Okrug-Yugra