บทความจะกล่าวถึงวิธีการทำ vibro-robot ขนาดเล็ก ทำมันเอง. อย่างเช่น หุ่นยนต์ เมื่อเปิดเครื่องพวกเขาจะเริ่มเต้นรำบนพื้นผิวที่เรียบและม้วนเป็นวงกลมบนโต๊ะ นี่เป็นเพราะมีการติดตั้งน้ำหนักที่ไม่สมดุลในเครื่องยนต์ซึ่งสร้างการสั่นสะเทือน ทุกคนสามารถประกอบหุ่นยนต์ดังกล่าวที่บ้านได้ซึ่งต้องใช้ทักษะและวัสดุขั้นต่ำ
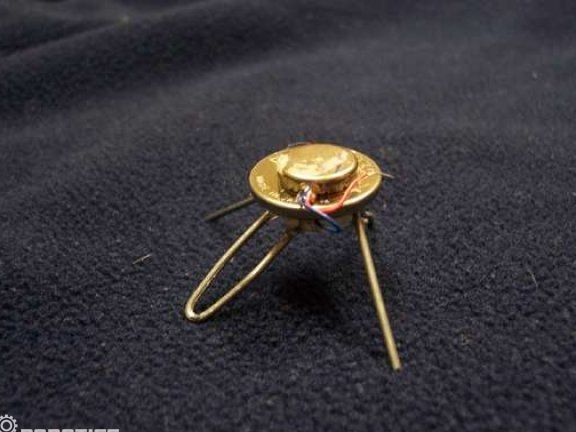
โดยเฉพาะอย่างนี้ รูปแบบ หุ่นยนต์นั้นชื่อว่า Itty Bitty ที่นี่มีการใช้มอเตอร์ไวโบรจากโทรศัพท์มือถือรุ่นเก่าและหุ่นยนต์ใช้พลังงานจากแบตเตอรี่นาฬิกา 3V
วัสดุและเครื่องมือสำหรับการสร้างหุ่นยนต์:
- แบตเตอรี่แบน 3V;
- มอเตอร์สั่นสะเทือนจากมือถือเก่า
- คลิปหนีบกระดาษขนาดใหญ่หนึ่งอัน
- หัวแร้งบัดกรีและฟลักซ์
- เทปไฟฟ้า
- กาวร้อน
- เครื่องหมายของสีเข้ม

ของเครื่องมือที่คุณต้องการไฟล์แอลกอฮอล์และคีม
กระบวนการผลิตของหุ่นยนต์:
ขั้นตอนแรก สร้างขาของหุ่นยนต์
การสร้างขาของหุ่นยนต์เป็นช่วงเวลาที่สำคัญที่สุดในเรื่องทั้งหมดนี้ การทำงานของหุ่นยนต์ทั้งหมดจะขึ้นอยู่กับความถูกต้องของหุ่นยนต์ ประการแรกขาควรแข็งแรงเนื่องจากด้วยการสั่นสะเทือนหุ่นยนต์จะกระโดดได้ค่อนข้างแรง พวกเขาทำจากลวดชิ้นเดียว คลิปหนีบกระดาษเหมาะสมที่สุดสำหรับวัตถุประสงค์เหล่านี้ ประการแรกมันจะต้องยืดออกแล้วแบ่งออกเป็น 6 ส่วนเท่า ๆ กัน เป็นผลให้ความยาวของแต่ละส่วนจะเป็น 1/16 นิ้ว



จุดสำคัญเมื่อทำงานกับคลิปหนีบกระดาษคือความนุ่มนวลในการเคลื่อนไหว หากคุณงอคลิปเร็วเกินไปอาจทำให้แตกได้ หากมุมยืดออกไปเกินกว่า 90 องศามุมเหล่านั้นจะต้องถูกปัดเศษ
ตอนนี้คุณต้องทำเครื่องหมายหนึ่งอันแล้วงอคลิป 90 องศาในที่นี้ที่อีกอันคุณจะต้องงอในทิศทางตรงกันข้าม หากปลายของคลิปโค้งมนในระหว่างการดัดสิ่งนี้จะลดโอกาสเกิดการแตกหักอย่างมาก



ในเครื่องหมายที่สามคุณต้องทำโค้ง 90 องศา แต่สถานที่ของโค้งควรจะไกลที่สุดจากปลาย
เมื่อถึงจุดที่สี่จะมีการโค้งงอ 180 องศาจุดสิ้นสุดควรอยู่ด้านหลัง
การทำให้งอ 90 องศาทำที่ขาที่ห้าและควรอยู่ห่างจากขาทั้งสองข้างที่อยู่ติดกันให้ได้ โดยสรุปต้องปรับขาเพื่อให้ทุกคนไม่ได้สัมผัสพื้นอย่างสม่ำเสมอ


ขั้นตอนที่สอง การติดตั้งเครื่องยนต์
แบตเตอรี่ทำหน้าที่เป็นองค์ประกอบสนับสนุนในหุ่นยนต์ดังกล่าว คุณต้องใช้ตัวสั่นและติดตั้งมอเตอร์ไวโบร หลังจากนั้นหนึ่งในสายไฟของมอเตอร์จะต้องถูกบัดกรีเข้ากับหน้าสัมผัสแบตเตอรี่ซึ่งจะเป็นหน้าสัมผัสด้านบน เพื่อที่จะวางประสานบัดกรีแบตเตอรี่จะต้องมีรอยขีดข่วนเล็กน้อยซึ่งสามารถทำได้ด้วยไฟล์

ขั้นตอนที่สาม กาวขา
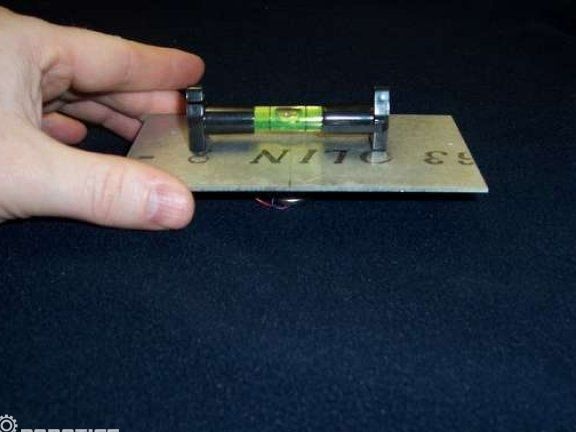
ตอนนี้สิ่งที่เหลืออยู่ก็คือการยึดขากับหุ่นยนต์ ในการทำเช่นนี้คุณต้องใส่แบตเตอรี่ลงบนโต๊ะและวางแบตเตอรี่ไว้บนขาของหุ่นยนต์ ถัดไปต้องกดขาลงด้วยเหตุนี้สามารถใช้ระดับเชิงเส้นหรืออลูมิเนียมกับขาได้ ก่อนที่จะทากาวแนะนำให้ลดระดับพื้นผิวของแบตเตอรี่ด้วยแอลกอฮอล์ ไม่จำเป็นต้องเสียใจกับกาวเนื่องจากเมื่อทำงานบนขาแรงกระทำมากพอสมควร หากคุณเหยียบเท้าไม่ดีหุ่นยนต์อาจกระเด็นออกมาระหว่างการใช้งาน
ไม่จำเป็นต้องรีบวิ่งไปที่หุ่นยนต์กาวจะต้องแข็งตัว ผู้เขียนแนะนำให้วางชิ้นงานในตู้เย็นเพื่อให้กาวแห้งเร็วขึ้น


นั่นคือทั้งหมดหุ่นยนต์พร้อมและคุณสามารถตรวจสอบได้ ในการเปิดหุ่นยนต์คุณจะต้องใช้เทปพันสายไฟและต่อสายไฟที่สองจากมอเตอร์เข้ากับขั้วแบตเตอรี่ ด้วยการวางหุ่นยนต์บนโต๊ะที่เรียบคุณสามารถสังเกตได้ว่ามันจะทำอะไร