
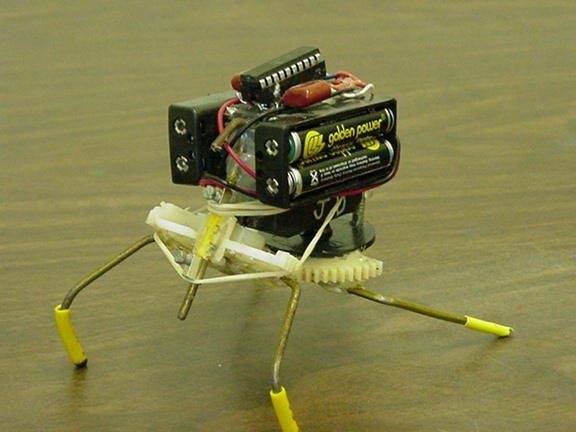
ไม่มีอะไรน่าสนใจไปกว่าหุ่นยนต์เดินเพราะเช่นนั้น หุ่นยนต์ เลียนแบบสิ่งมีชีวิตที่ดีที่สุดที่อาศัยอยู่กับเราบนโลกของเรา เพื่อให้หุ่นยนต์นั้นไม่ยาก แต่คุณต้องมีความต้องการและทักษะบางอย่างในด้านอิเล็กทรอนิกส์
วัสดุและเครื่องมือ:
- ชิ้นส่วนของลวดทองแดง
- ผู้ถือสองนิ้วของแบตเตอรี่;
- ตัวเก็บประจุเซรามิกแบบเสาเดี่ยวสองอันที่ 0.22 mF ต่อตัว
- ตัวต้านทาน 3.3M หนึ่งตัว;
- ชิปอินเวอร์เตอร์แบบฐานแปด 74NST240 สำหรับแปดช่องทาง (หนึ่ง);
- 20 พิน DIP 74XX240 หรือ 74XX245 (หนึ่ง);
- servomotor (หนึ่ง);
- สวิตช์
- เกียร์พลาสติกหนึ่งอัน
- ขั้วต่อสายไฟ
กระบวนการผลิต:
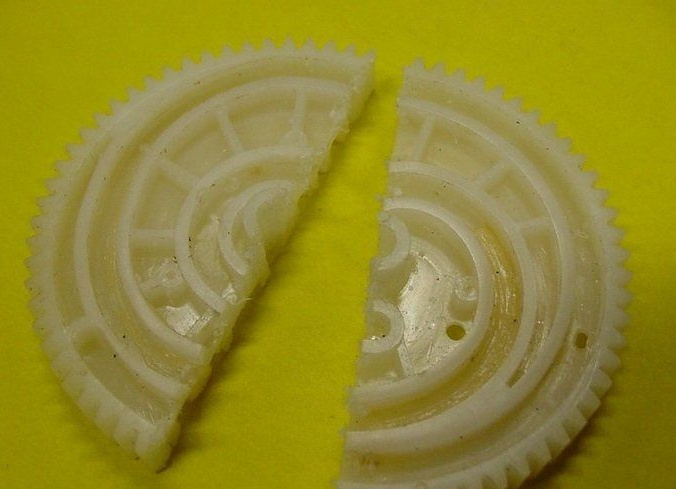
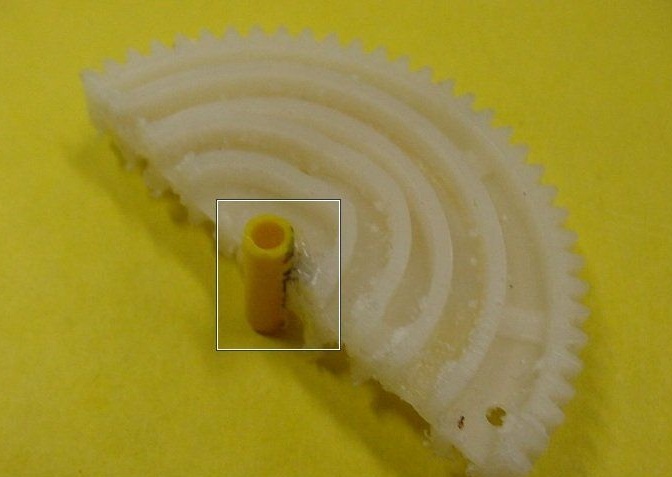
ขั้นตอนแรก การเตรียมเกียร์
คุณต้องนำเกียร์พลาสติกและตัดมันออกเป็นสองส่วนเหมือนกัน จากนั้นคุณจำเป็นต้องเอาแตรออกและใช้กาวเพื่อยึดให้เป็นครึ่งวงกลม

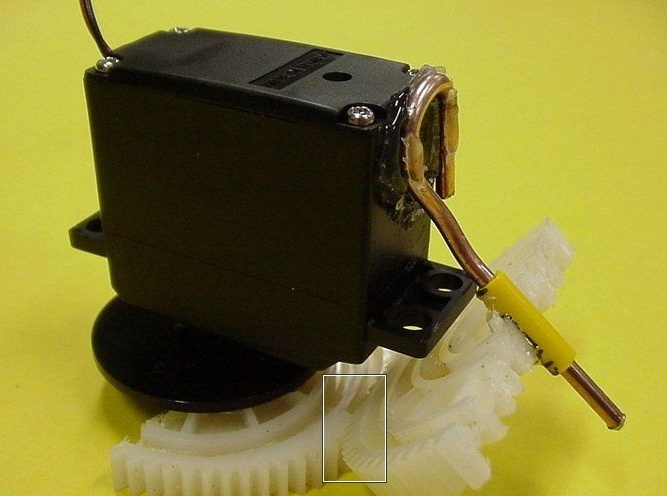
ขั้นตอนที่สอง การเปลี่ยนแปลงของเครื่องยนต์
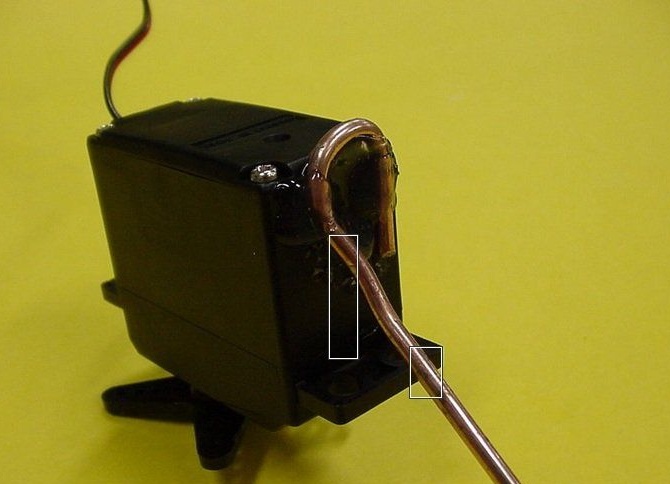
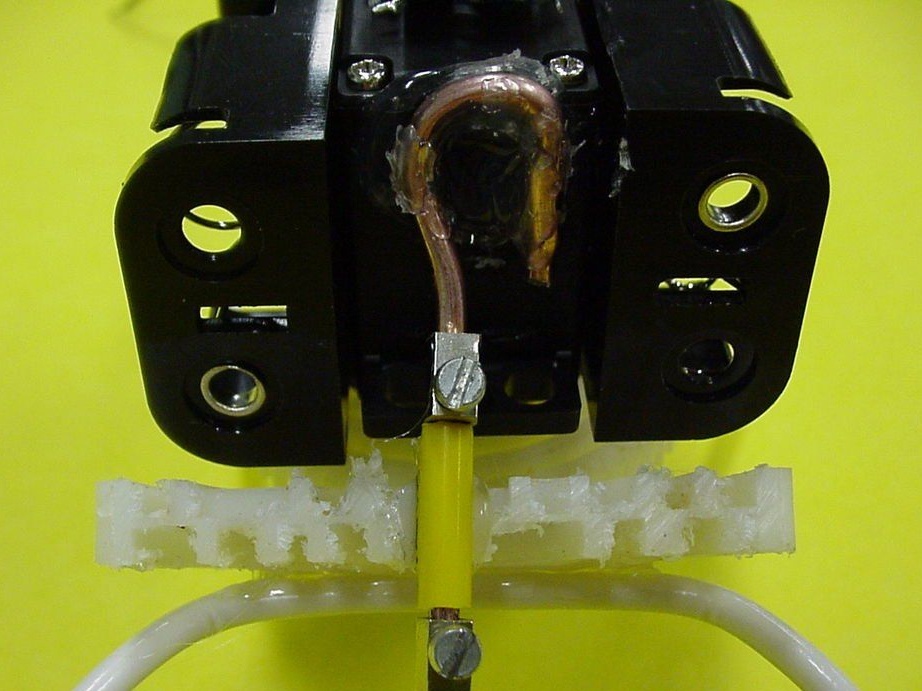
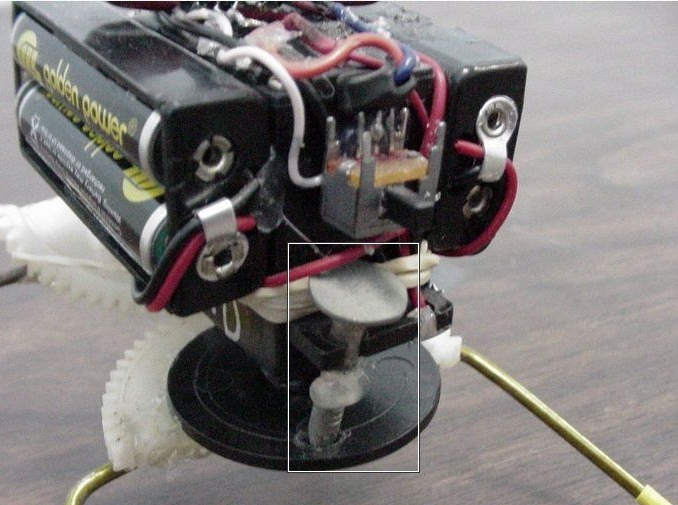
เซอร์โวมอเตอร์จะต้องทำการต่อใหม่เพื่อให้หมุนได้อย่างเดียวเท่านั้น จากนั้นคุณต้องติดกาวลวดทองแดงตามที่แสดงในภาพ
ในขั้นตอนนี้คุณจะต้องมีท่อพลาสติกที่มีขนาดเส้นผ่าศูนย์กลางที่เหมาะสมจะต้องติดกาวกับครึ่งวงกลม แตรเซอร์โวมอเตอร์จะถูกวางไว้ในตำแหน่งเดิมในภายหลัง จากนั้นใส่หลอดพลาสติกลงบนลวดทองแดง ในขั้นตอนนี้งานสามารถพิจารณาเสร็จ

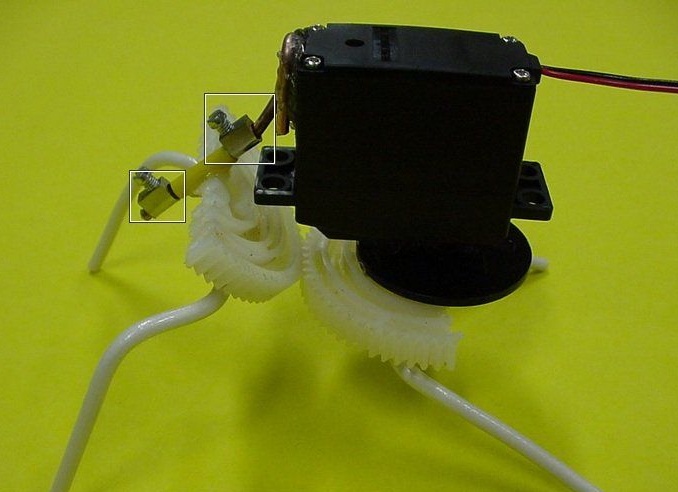
ขั้นตอนที่สาม การสร้างและติดตั้งอุ้งเท้าหุ่นยนต์
ใช้ลวดทองแดงเป็นขาจะต้องงอตามที่ระบุในภาพ จากนั้นผู้เขียนก็จับอุ้งเท้าไปที่ครึ่งวงกลม ตอนนี้คุณสามารถต่อตัวยึดแบตเตอรี่เข้ากับเซอร์โวมอเตอร์ได้


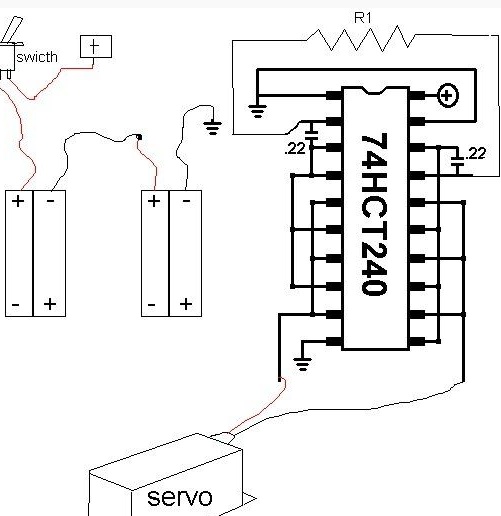
ขั้นตอนที่สี่ ทำงานกับอุปกรณ์อิเล็กทรอนิกส์
บางทีนี่อาจเป็นช่วงเวลาที่ยากลำบากและสำคัญที่สุด ระบบทั้งหมดจะต้องเชื่อมต่ออย่างชัดเจนตามที่ระบุในแผนภาพ ทันทีหลังจากเชื่อมต่อหุ่นยนต์จะพร้อมและสามารถทดสอบได้

ด้วยการเปลี่ยนมุมของขาคุณจะได้รับคุณลักษณะที่หลากหลายจากหุ่นยนต์ คุณสามารถทำได้เร็วขึ้นหรือช้าลง นอกจากนี้คุณยังสามารถติดตั้งหุ่นยนต์ด้วยส่วนควบคุมเพิ่มเติมเช่นหนวดซึ่งจะเป็นตัวกำหนดอุปสรรค นอกจากนี้คุณยังสามารถติดตั้งหุ่นยนต์ด้วยดวงตาในรูปแบบของไฟ LED ซึ่งจะสร้างความสมจริงที่ยิ่งใหญ่กว่าของภาพสิ่งมีชีวิต
คุณจำเป็นต้องเรียกใช้หุ่นยนต์บนพื้นผิวเรียบ เพื่อป้องกันไม่ให้ขาของเขาลื่นไถล Cambrices สามารถสวมที่ปลายของพวกเขา