


คอนโทรลเลอร์ PWM ถูกออกแบบมาเพื่อควบคุมความเร็วในการหมุนของมอเตอร์ขั้วโลกความสว่างของหลอดไฟหรือพลังขององค์ประกอบความร้อน
ข้อดี:
1 ความสะดวกในการผลิต
2 ความพร้อมใช้งานของส่วนประกอบ (ค่าใช้จ่ายไม่เกิน $ 2)
3 ใช้อย่างกว้างขวาง
4 สำหรับผู้เริ่มต้นฝึกอีกครั้งแล้วทำตามใจตัวเอง =)
เมื่อฉันต้องการ "อุปกรณ์" เพื่อปรับความเร็วในการหมุนของคูลเลอร์ ทำไมฉันถึงจำไม่ได้ จากจุดเริ่มต้นที่ฉันลองผ่านตัวต้านทานตัวแปรปกติมันร้อนมากและนี่ก็ไม่เป็นที่ยอมรับสำหรับฉัน เป็นผลให้ขุดบนอินเทอร์เน็ตฉันพบวงจรในชิป NE555 ที่คุ้นเคยอยู่แล้ว นี่เป็นรูปแบบของตัวควบคุม PWM ทั่วไปที่มีรอบการทำงาน (ระยะเวลา) ของพัลส์เท่ากับหรือน้อยกว่า 50% (ฉันจะให้กราฟของการทำงานในภายหลัง) วงจรกลายเป็นเรื่องง่ายมากและไม่ต้องการการปรับแต่งสิ่งสำคัญคือไม่ยุ่งกับการเชื่อมต่อของไดโอดและทรานซิสเตอร์ ครั้งแรกที่เขาประกอบมันบนเขียงหั่นขนมและทดสอบมันทำงานได้ครึ่งเทิร์น ต่อมาฉันแยกแผงวงจรเล็ก ๆ ออกมาแล้วทุกอย่างก็ดูดีกว่า =) ทีนี้ลองมาดูวงจรกันเถอะ!
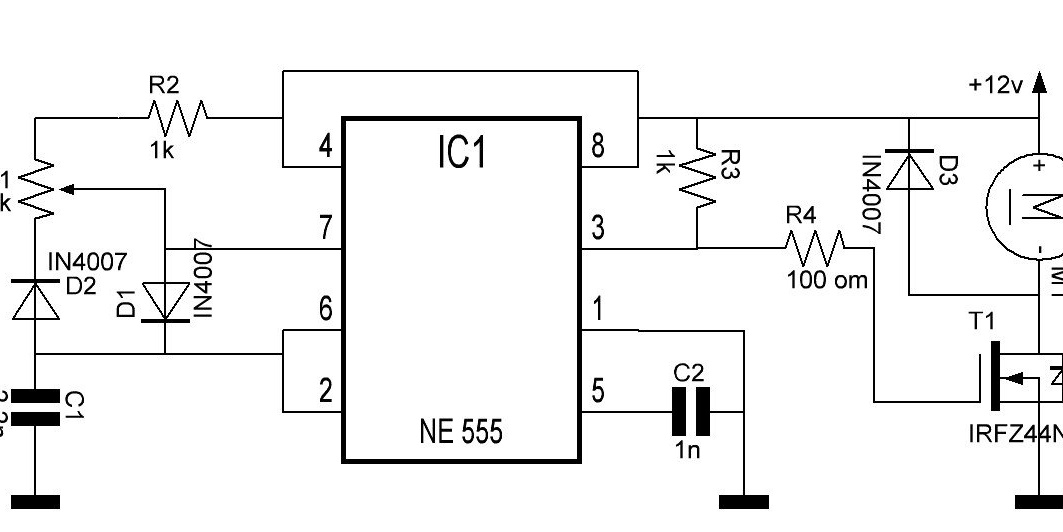
วงจรควบคุม PWM
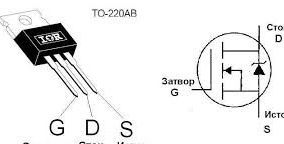
จากนั้นเราจะเห็นว่านี่เป็นเครื่องกำเนิดไฟฟ้าทั่วไปที่มีตัวควบคุมวัฏจักรหน้าที่ประกอบตามแบบแผนจากแผ่นข้อมูล และเราเปลี่ยนวัฏจักรหน้าที่นี้โดยตัวต้านทาน R1 ตัวต้านทาน R2 ทำหน้าที่ป้องกันการลัดวงจรเนื่องจาก Microcircuit 4 ขาเชื่อมต่อกับพื้นดินผ่านปุ่มภายในของตัวจับเวลาและเมื่ออยู่ในตำแหน่งที่รุนแรง R1 มันจะปิดเพียง R3 เป็นตัวต้านทานแบบดึงขึ้น C2 เป็นตัวเก็บประจุการตั้งค่าความถี่ IRFZ44N เป็น mosfet ของ N channel D3 เป็นไดโอดป้องกันที่ป้องกันความล้มเหลวของสนามในระหว่างการแตกของโหลด ทีนี้เล็กน้อยเกี่ยวกับวัฏจักรหน้าที่ของพัลส์ อัตราแรงกระตุ้นคืออัตราส่วนของระยะเวลาการทำซ้ำ (การทำซ้ำ) ต่อระยะเวลาของแรงกระตุ้นนั่นคือหลังจากช่วงระยะเวลาหนึ่งจะมีการเปลี่ยนจาก (การพูดโดยประมาณ) บวกกับลบหรือมากกว่าจากหน่วยโลจิคัลเป็นศูนย์ตรรกะ ดังนั้นช่วงเวลานี้ระหว่างพัลส์จึงเป็นรอบการทำงานเดียวกัน
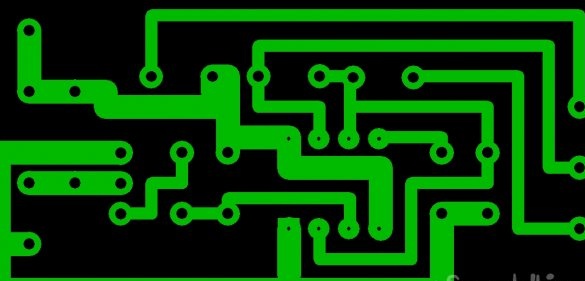
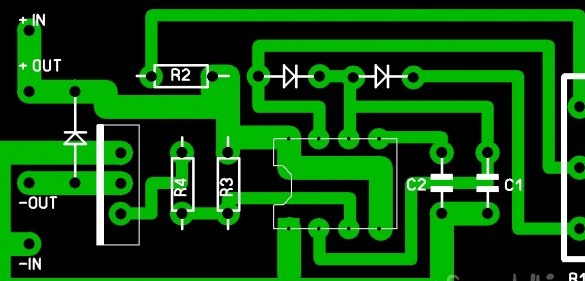
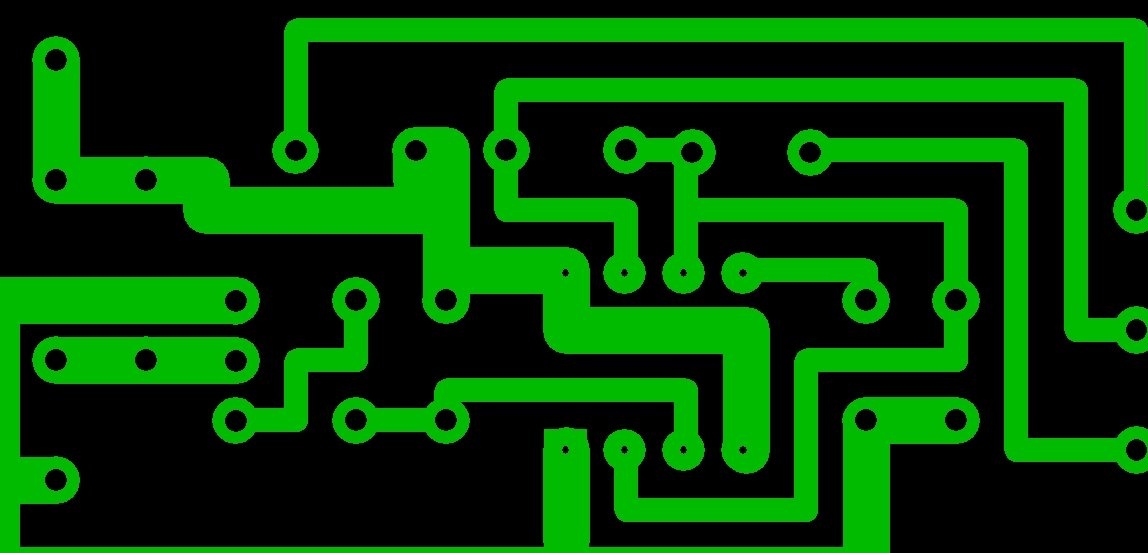
ด้านล่างเป็นแผงวงจรพิมพ์ที่มีตำแหน่งของชิ้นส่วนและไม่มี
ตอนนี้เล็กน้อยเกี่ยวกับรายละเอียดและลักษณะที่ปรากฏตัวชิปนั้นทำในแพ็คเกจ DIP-8 ตัวเก็บประจุเซรามิกขนาดเล็กตัวต้านทาน 0.125-0.25 วัตต์ การแก้ไขไดโอดปกติที่ 1A (ราคาไม่แพงมากที่สุดคือ 1N4007 เป็นกลุ่มได้ทุกที่) นอกจากนี้ชิปยังสามารถติดตั้งบนซ็อกเก็ตได้หากในอนาคตคุณต้องการใช้งานในโครงการอื่นและไม่บัดกรีอีกครั้ง ด้านล่างนี้เป็นภาพถ่ายของรายละเอียด




P.S: คะแนนของตัวเก็บประจุอาจแตกต่างกันจาก 2.2 nanofarads ถึง 4.7 nanofarads ความต้านทานของตัวต้านทาน R4 อยู่ระหว่าง 47-180 โอห์ม
P.P.S: ฉันใช้ตัวควบคุม PWM นี้เพื่อควบคุม: ความเร็วรอบเครื่องยนต์, ความสว่างของหลอดไฟและอุณหภูมิขององค์ประกอบความร้อน
ฉันขอให้คุณประสบความสำเร็จในการสร้างสรรค์ขอบคุณสำหรับความสนใจของคุณ!
จากนั้นเราจะเห็นว่านี่เป็นเครื่องกำเนิดไฟฟ้าทั่วไปที่มีตัวควบคุมวัฏจักรหน้าที่ประกอบตามแบบแผนจากแผ่นข้อมูล และเราเปลี่ยนวัฏจักรหน้าที่นี้โดยตัวต้านทาน R1 ตัวต้านทาน R2 ทำหน้าที่ป้องกันการลัดวงจรเนื่องจาก Microcircuit 4 ขาเชื่อมต่อกับพื้นดินผ่านปุ่มภายในของตัวจับเวลาและเมื่ออยู่ในตำแหน่งที่รุนแรง R1 มันจะปิดเพียง R3 เป็นตัวต้านทานแบบดึงขึ้น C2 เป็นตัวเก็บประจุการตั้งค่าความถี่ IRFZ44N เป็น mosfet ของ N channel D3 เป็นไดโอดป้องกันที่ป้องกันความล้มเหลวของสนามในระหว่างการแตกของโหลด ทีนี้เล็กน้อยเกี่ยวกับวัฏจักรหน้าที่ของพัลส์ อัตราแรงกระตุ้นคืออัตราส่วนของระยะเวลาการทำซ้ำ (การทำซ้ำ) ต่อระยะเวลาของแรงกระตุ้นนั่นคือหลังจากช่วงระยะเวลาหนึ่งจะมีการเปลี่ยนจาก (การพูดโดยประมาณ) บวกกับลบหรือมากกว่าจากหน่วยโลจิคัลเป็นศูนย์ตรรกะ ดังนั้นช่วงเวลานี้ระหว่างพัลส์จึงเป็นรอบการทำงานเดียวกัน
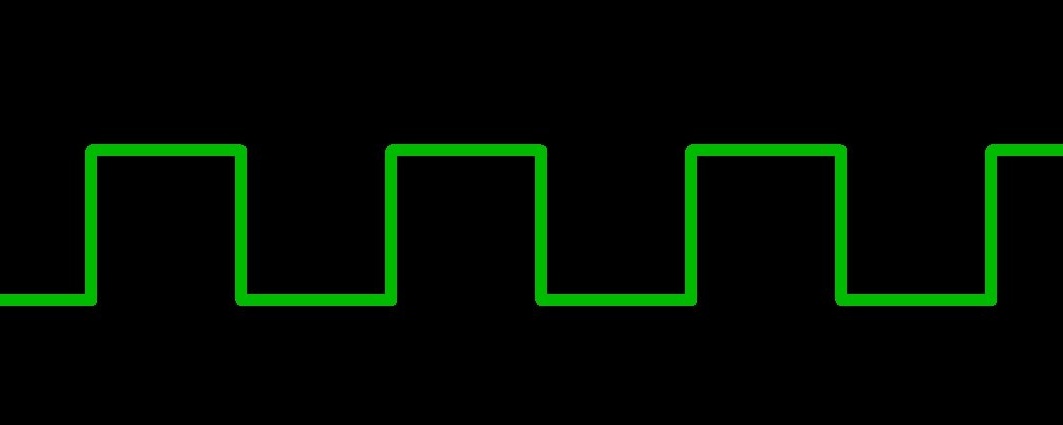
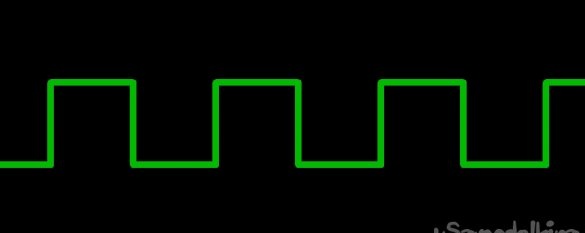
อัตราส่วนภาระหน้าที่ที่ตำแหน่งกลาง R1
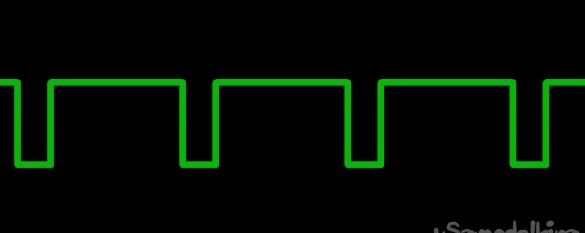
อัตราส่วนหน้าที่ที่ตำแหน่งซ้ายสุด R1
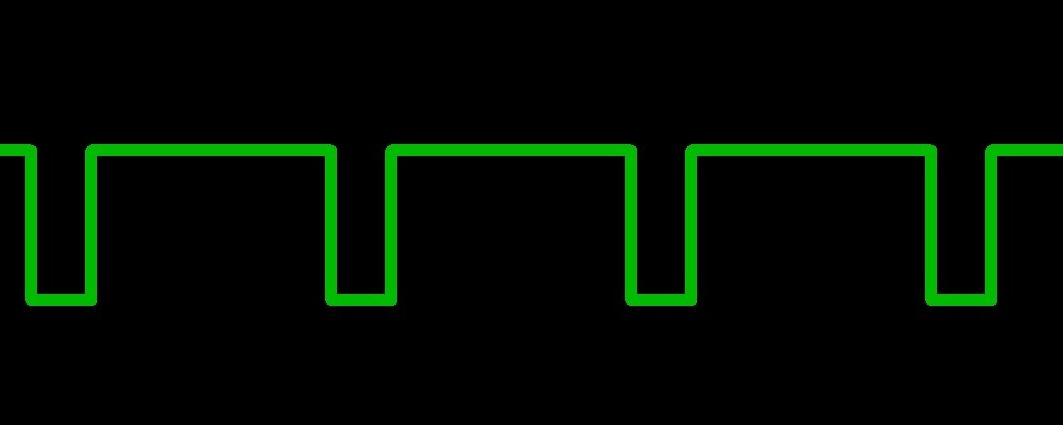
อัตราส่วนหน้าที่ที่ตำแหน่งขวาสุด R
ด้านล่างเป็นแผงวงจรพิมพ์ที่มีตำแหน่งของชิ้นส่วนและไม่มี
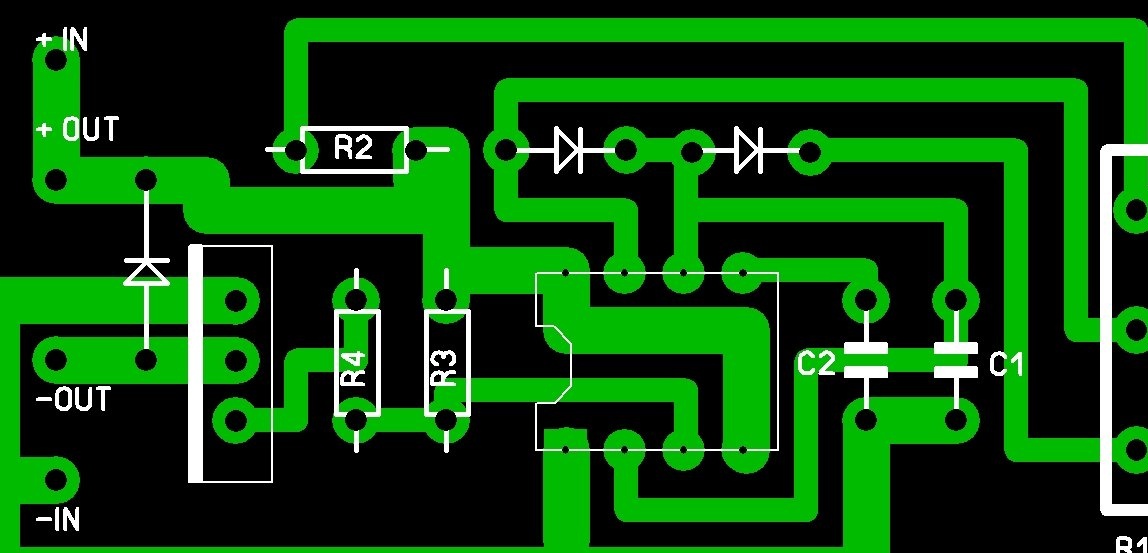
ตอนนี้เล็กน้อยเกี่ยวกับรายละเอียดและลักษณะที่ปรากฏตัวชิปนั้นทำในแพ็คเกจ DIP-8 ตัวเก็บประจุเซรามิกขนาดเล็กตัวต้านทาน 0.125-0.25 วัตต์ การแก้ไขไดโอดปกติที่ 1A (ราคาไม่แพงมากที่สุดคือ 1N4007 เป็นกลุ่มได้ทุกที่) นอกจากนี้ชิปยังสามารถติดตั้งบนซ็อกเก็ตได้หากในอนาคตคุณต้องการใช้งานในโครงการอื่นและไม่บัดกรีอีกครั้ง ด้านล่างนี้เป็นภาพถ่ายของรายละเอียด
P.S: คะแนนของตัวเก็บประจุอาจแตกต่างกันจาก 2.2 nanofarads ถึง 4.7 nanofarads ความต้านทานของตัวต้านทาน R4 อยู่ระหว่าง 47-180 โอห์ม
P.P.S: ฉันใช้ตัวควบคุม PWM นี้เพื่อควบคุม: ความเร็วรอบเครื่องยนต์, ความสว่างของหลอดไฟและอุณหภูมิขององค์ประกอบความร้อน
ฉันขอให้คุณประสบความสำเร็จในการสร้างสรรค์ขอบคุณสำหรับความสนใจของคุณ!