
เมื่อไม่นานมานี้ฉันได้สร้างหุ่นยนต์ขึ้นมาหลายสิบชิ้นส่วนใหญ่ได้รับแรงบันดาลใจจากความมหัศจรรย์ของหุ่นยนต์ BEAM หากคุณไม่คุ้นเคยกับเทคโนโลยีนี้ BEAM เป็นวิธีพิเศษในการสร้างหุ่นยนต์ที่เน้น B - ชีววิทยา E - อิเล็กทรอนิกส์ (อิเล็กทรอนิกส์), สุนทรียศาสตร์ (สุนทรียศาสตร์) และ M - กลศาสตร์ (กลศาสตร์) นี่คือคานตัวย่อ สิ่งที่แยกเทคโนโลยีนี้ออกจากแนวทางอื่น ๆ คือการใช้พลังงานรังสีเพียงอย่างเดียวสำหรับสารอาหาร (ส่วนใหญ่เป็นพลังงานแสงอาทิตย์) การกำจัดวัสดุต่างๆ แม้ว่าฉันได้นำหลักการเหล่านี้มาใช้ หุ่นยนต์ ไม่ได้อยู่ในจิตวิญญาณของ BEAM (ขับเคลื่อนด้วยแบตเตอรี่)
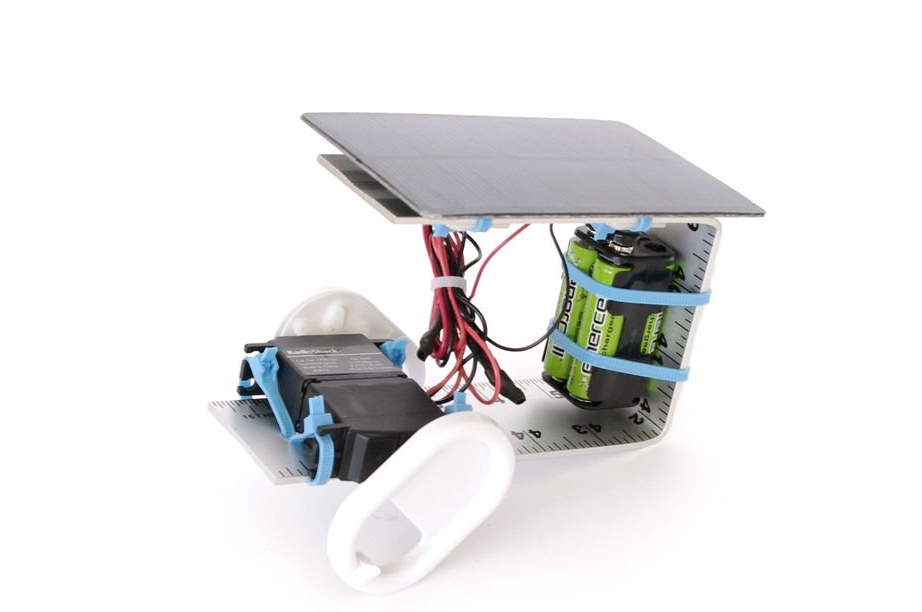
เนื่องจากหุ่นยนต์ BEAM เป็นแรงบันดาลใจให้ฉันอย่างจริงจังฉันจึงต้องการสร้างหุ่นยนต์ที่ใช้พลังงานแสงอาทิตย์ แต่แทนที่จะสร้างหุ่นยนต์ BEAM ฉันตัดสินใจที่จะรวมแผงโซลาร์เซลล์เข้ากับหุ่นยนต์ตามสไตล์ปกติของฉัน แทนที่จะใช้พลังงานจากดวงอาทิตย์อย่างเต็มที่ฉันจึงตัดสินใจสร้างแบตเตอรี่แบบชาร์จใหม่ได้ นั่นคือหุ่นยนต์ของฉันสามารถใช้พลังงานจากแบตเตอรี่หรือจากแผงเซลล์แสงอาทิตย์ขึ้นอยู่กับแหล่งพลังงานที่มีประสิทธิภาพมากขึ้นในปัจจุบัน แผงโซลาร์เซลล์ยังชาร์จแบตเตอรี่เมื่อโดนแสงอาทิตย์ ทำให้หุ่นยนต์เคลื่อนที่ได้ทั้งในแสงและในที่ร่ม
ฉันคิดว่าวิธีการนี้รวมสองสไตล์ได้สำเร็จและนี่เป็นการทดลองที่น่าสนใจในการสร้างหุ่นยนต์
ขั้นตอนที่ 1: วัสดุ
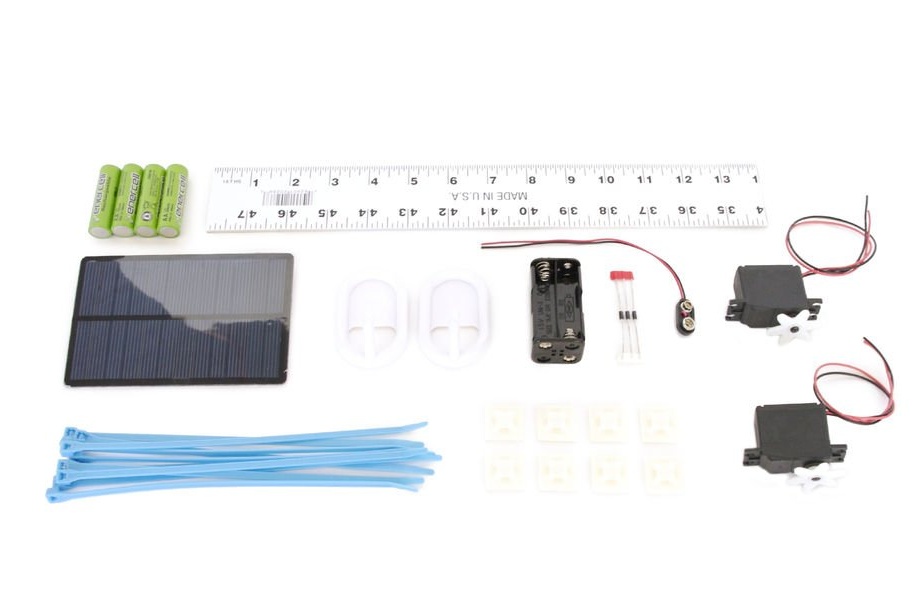
คุณจะต้อง:
(x1) แผงโซล่าร์
(x2) เซอร์โวมอเตอร์มาตรฐาน
(x3) ไดโอด Schottky 1N5817 - NTE578 เทียบเท่า
(x1) แบตเตอรี่ 9V
(x8) แบตเตอรี่ AA แบบชาร์จใหม่ได้
(x1) 8 x AA ก้อนแบตเตอรี่
(x12) ฐานสำหรับตัวหนีบ
(x1) ไม้บรรทัด (30 - 50 ซม.)
(x2) ตะขอกาวติดผนัง
(x1) ที่หนีบพลาสติก
(x1) ท่อหดความร้อน
ขั้นตอนที่ 2: ปรับเปลี่ยนเซอร์โว

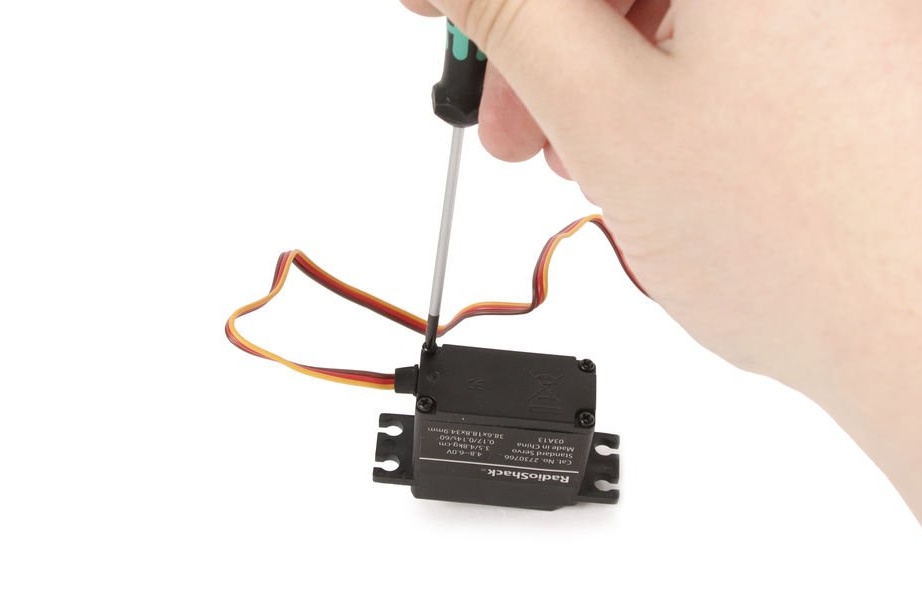
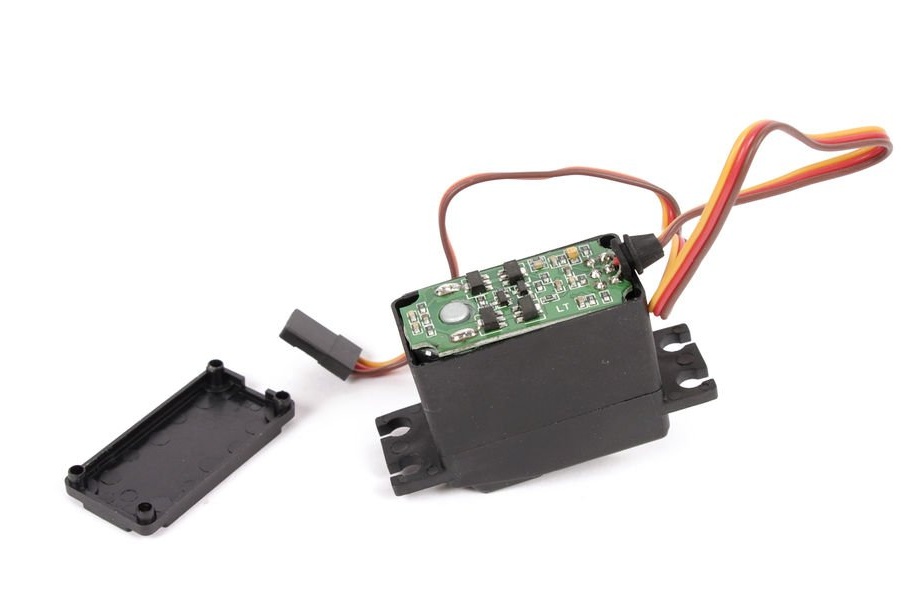
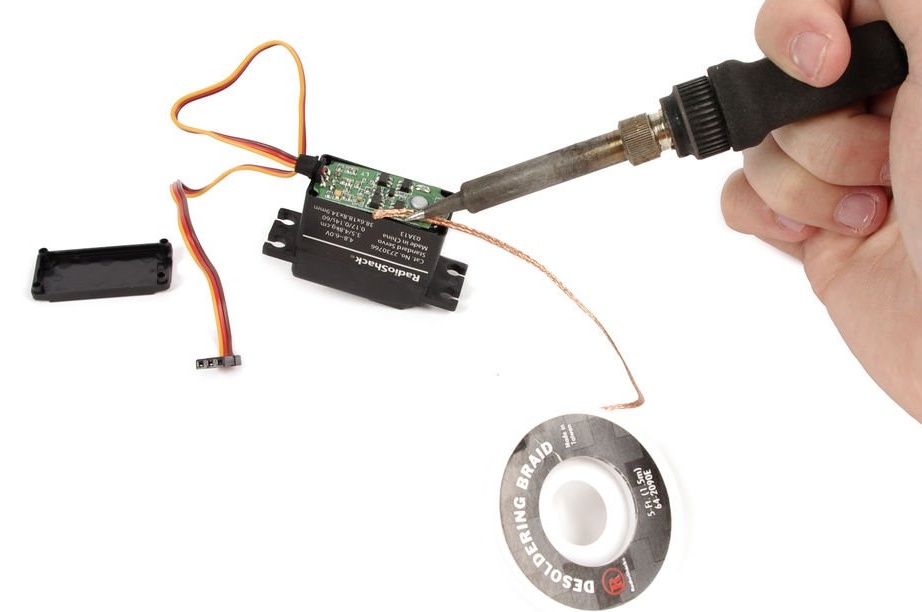
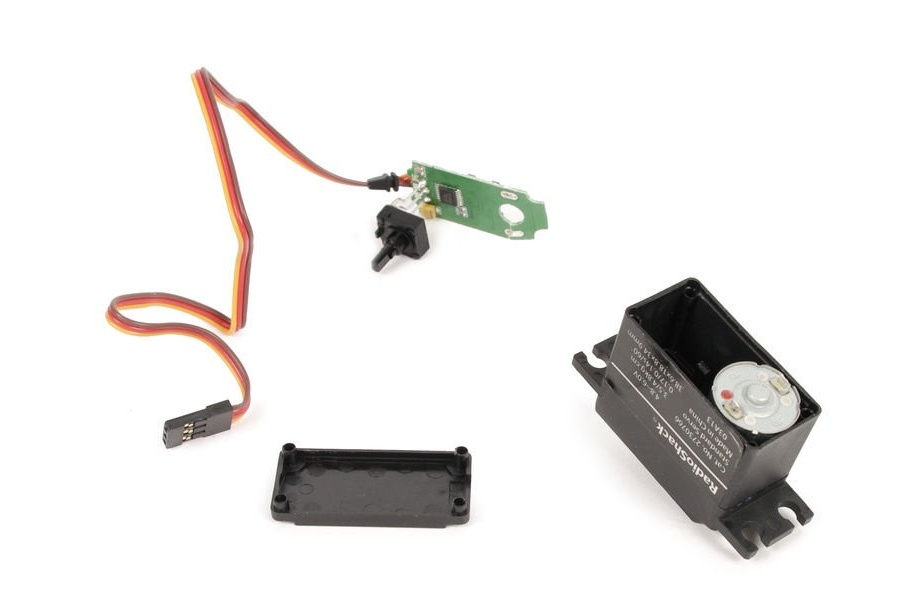




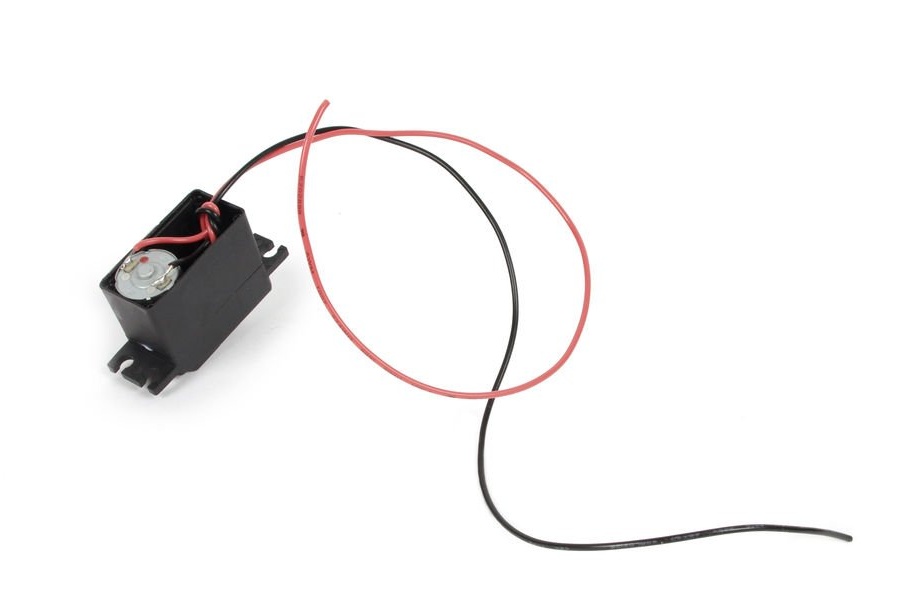
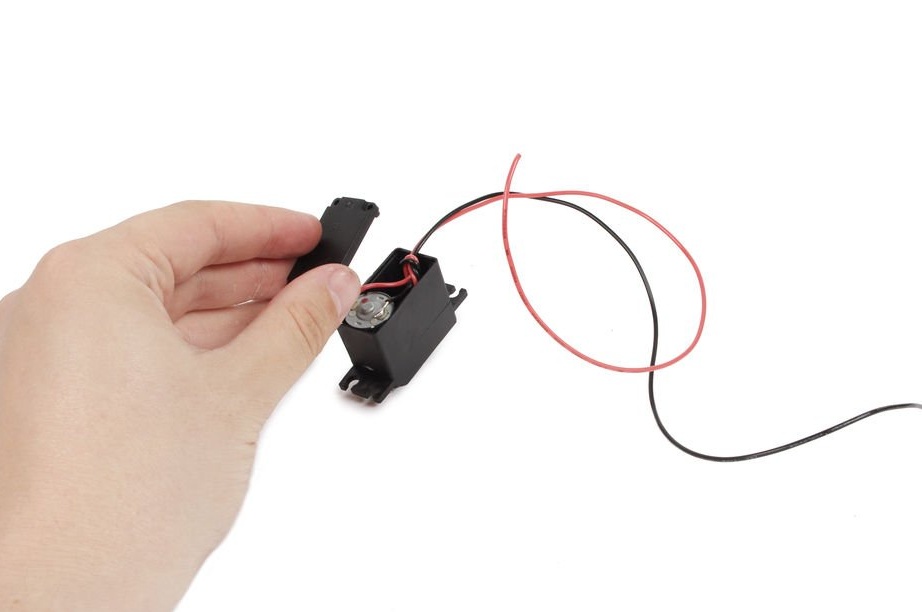

เปิดตัวเรือนเซอร์โวโดยคลายเกลียวสกรู 4 ตัวที่แผงด้านล่าง คลายซิปบอร์ดด้านในและเชื่อมต่อสายไฟสีแดงและสีดำเข้ากับขั้วของไดรฟ์แต่ละตัว
เปิดไดรฟ์เกียร์และค้นหาเกียร์ด้วยฝาพลาสติกขนาดเล็กที่ป้องกันการหมุนอย่างต่อเนื่อง ตัดหมวกออกจากเกียร์
ขั้นตอนที่ 3: เจาะ
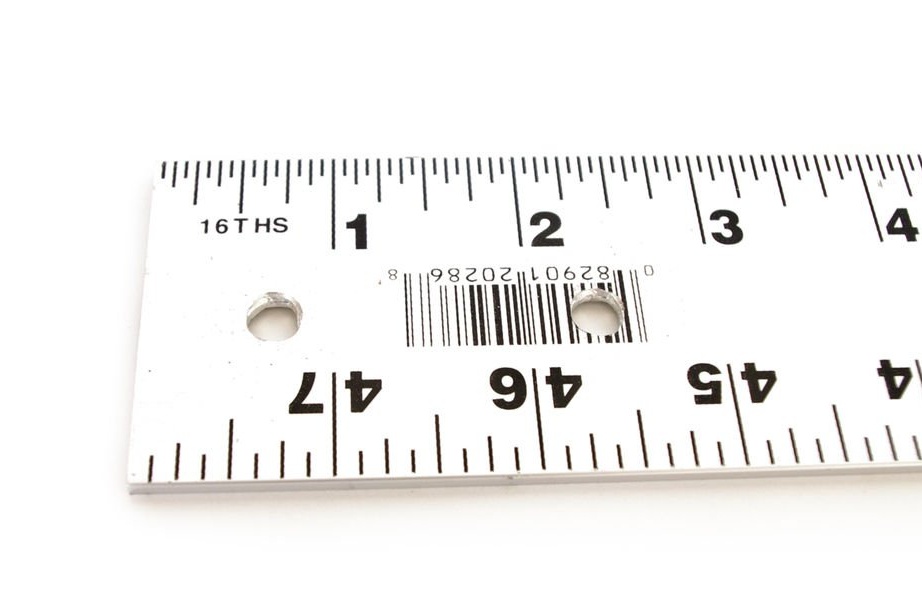


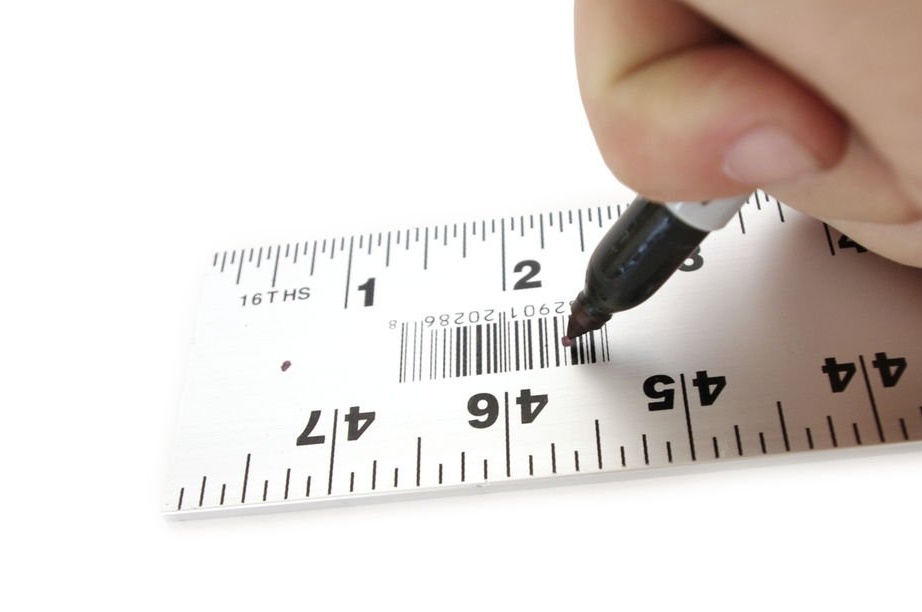
เจาะรูหนึ่งส่วนสี่นิ้ว (6.3 มม.) ที่กึ่งกลางของไม้บรรทัดประมาณ 15 มม. จากขอบสั้น เจาะรูที่สองประมาณ 60 มม. จากขอบเดียวกัน
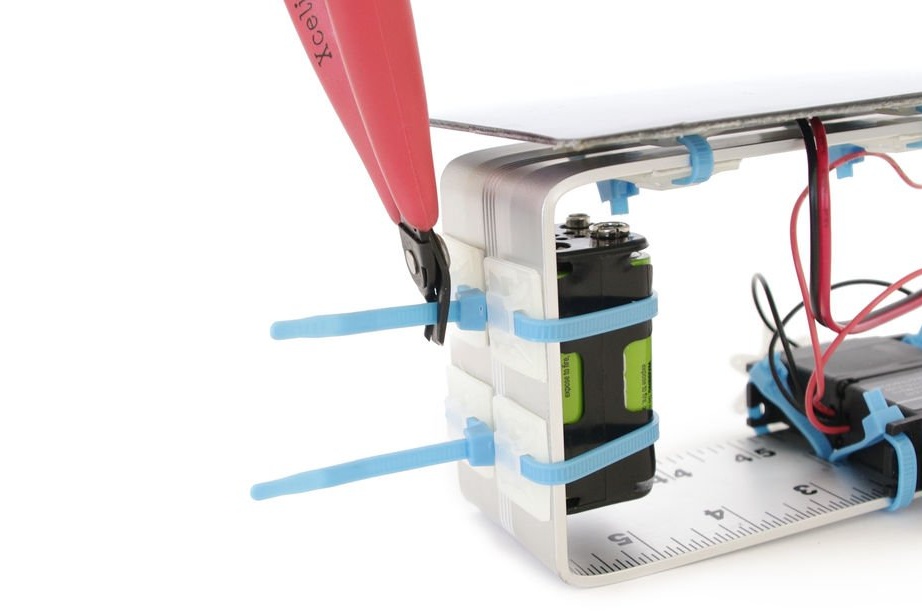
ขั้นตอนที่ 4: โค้งงอ

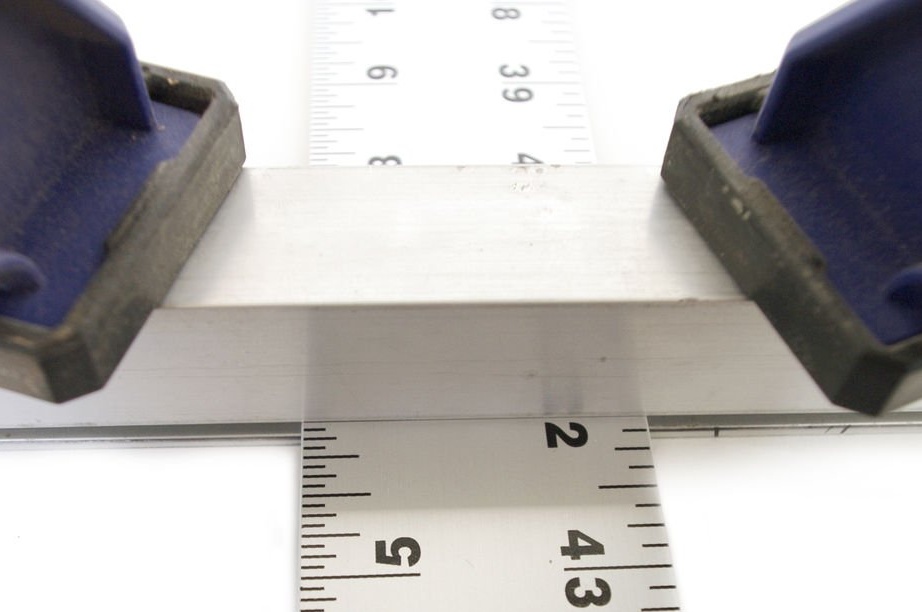
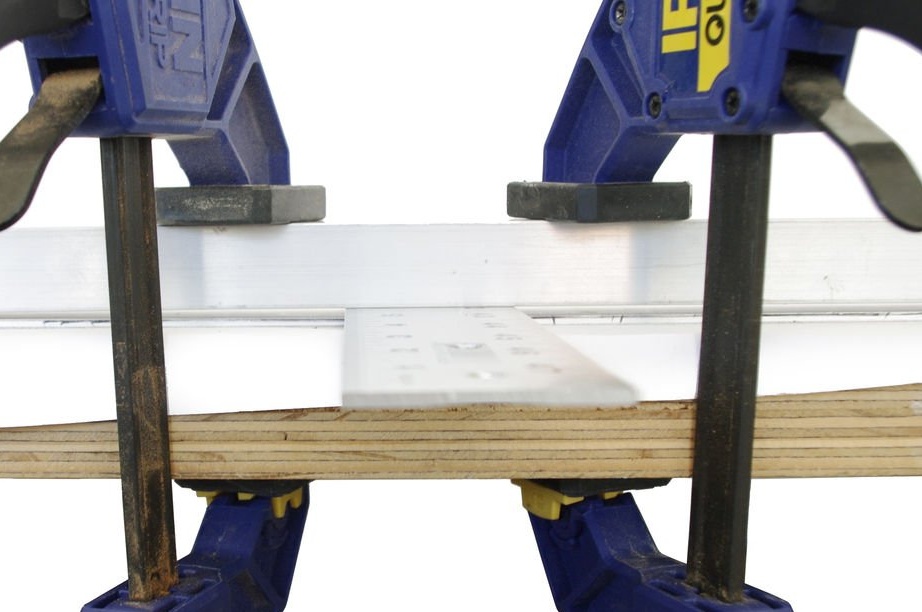

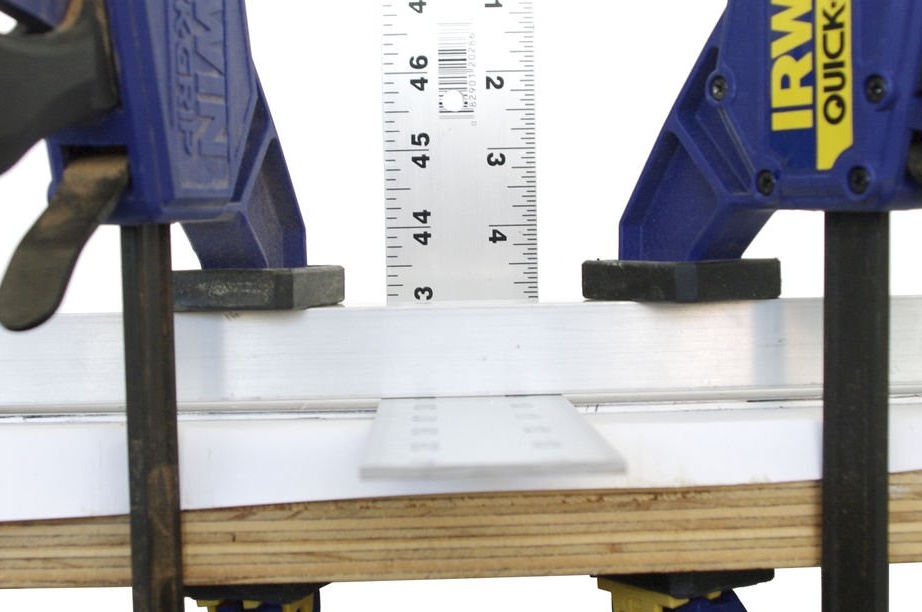

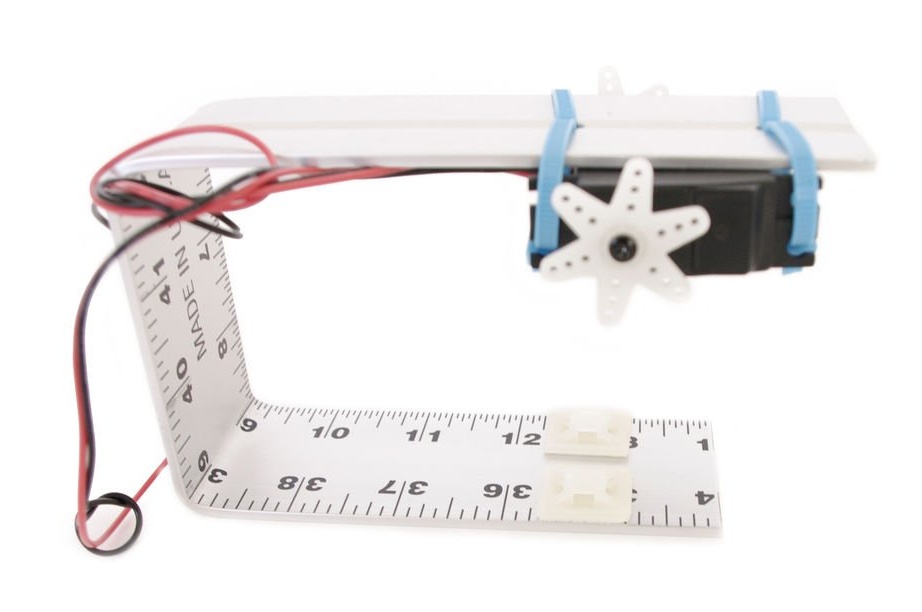
ใช้คีมหนีบหรือแผ่นโลหะสองอันจับที่ขอบโต๊ะโค้งงอไม้บรรทัดในมุม 90 องศาที่ระยะ 15 ซม. จากขอบที่เจาะรู
ทำให้โค้งงอเดียวกันที่มุม 90 องศาที่ระยะ 15 ซม. จากขอบอื่น ๆ คุณจะได้ตัวเลขในรูปของตัวอักษร P
ขั้นตอนที่ 5: การเชื่อมต่อ
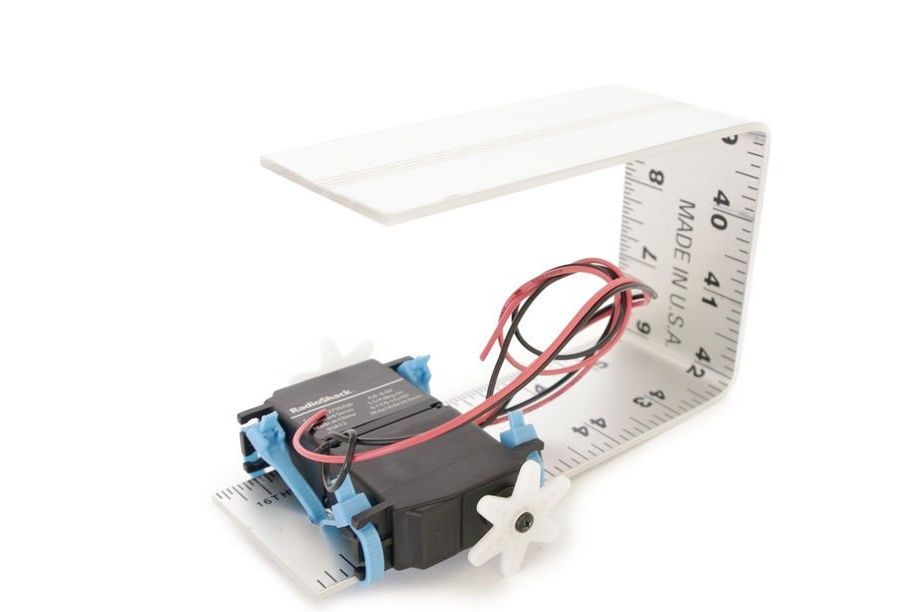

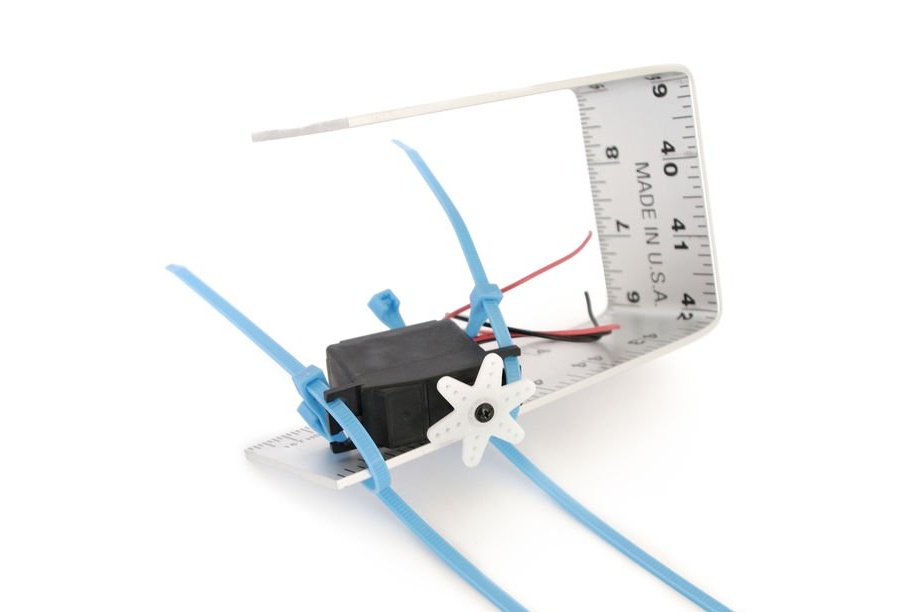
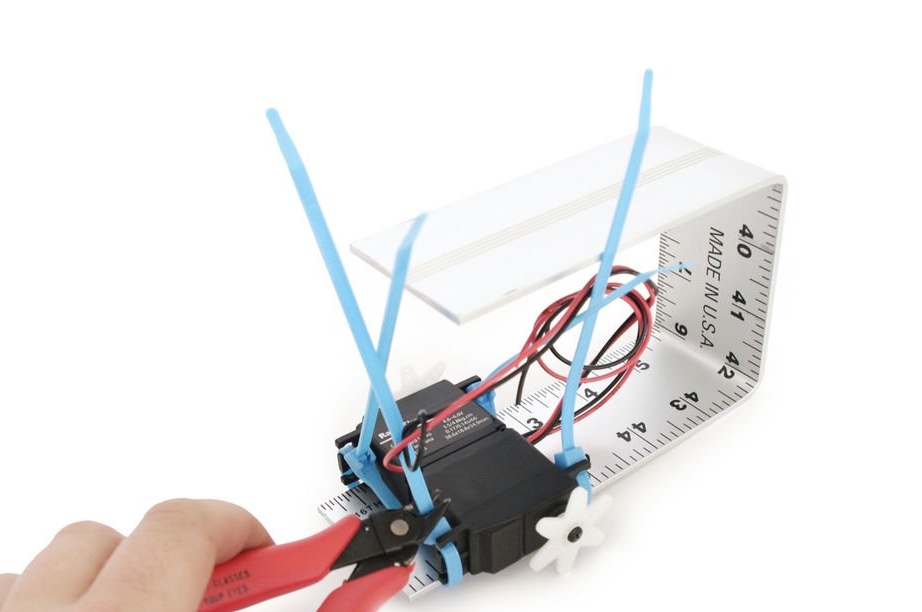
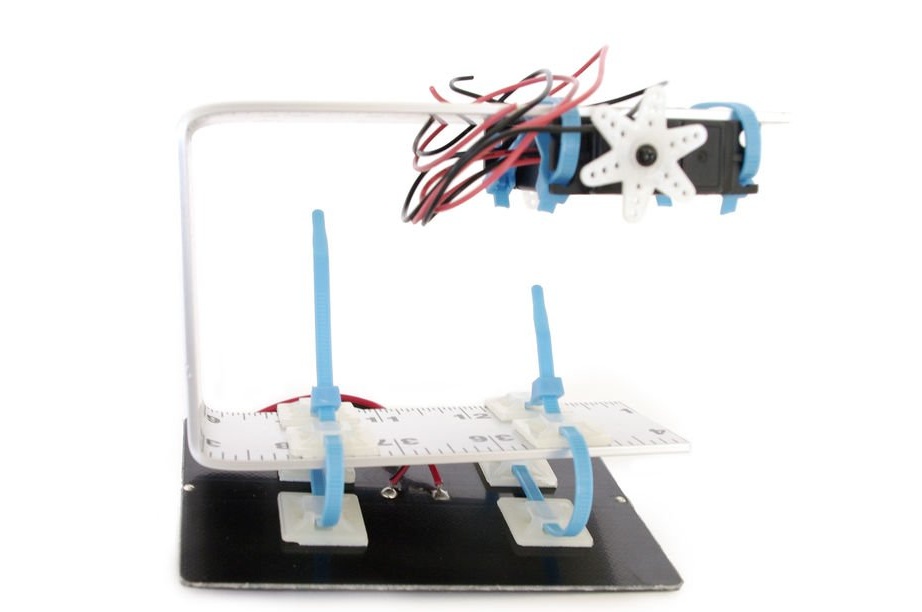
จำเป็นต้องซ่อมเซอร์โวบนสายด้วยปากกาจับพลาสติกผ่านรูเจาะ Servomotors ต้องนั่งโดยให้หลังกัน
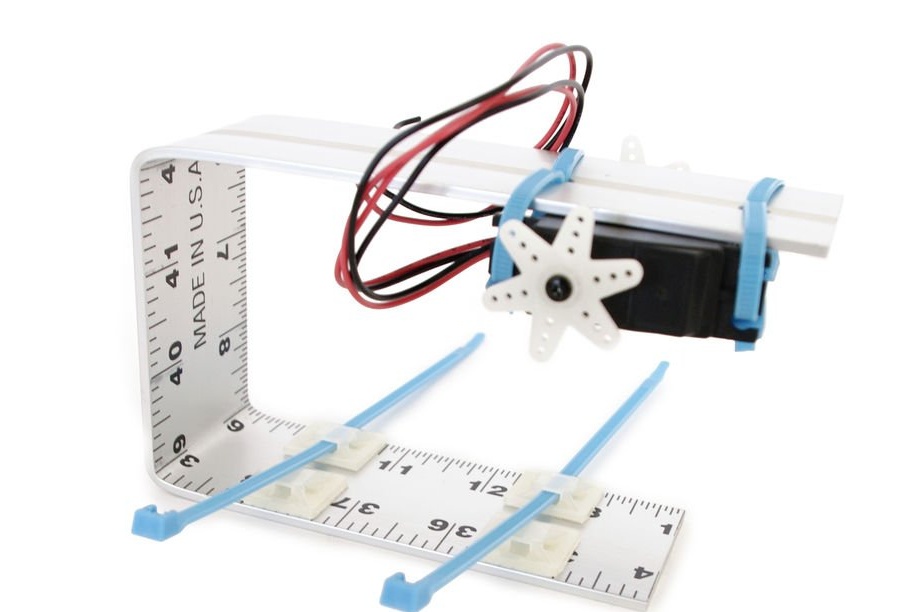
ขั้นตอนที่ 6: ฐานสำหรับยึด
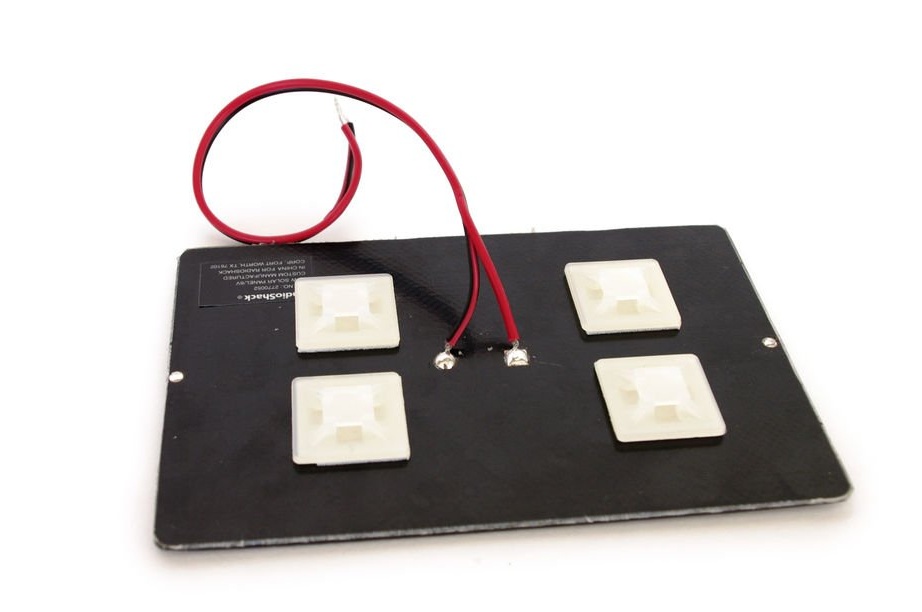

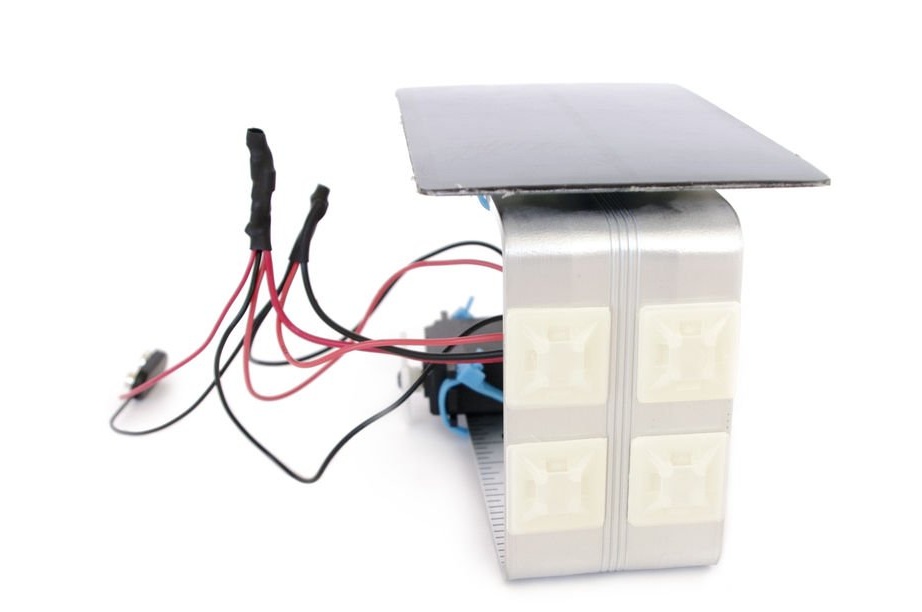
วางฐานยึดสองคู่ติดกันที่ด้านหลังของแผงเซลล์แสงอาทิตย์ เป็นสิ่งสำคัญที่ช่องของแต่ละคู่อยู่ในบรรทัดเดียวกัน
ขั้นตอนที่ 7: เหตุผลเพิ่มเติม
ยึดฐานอีกสองฐานเข้ากับด้านในของ U-bar ไปทางด้านตรงข้ามเซอร์โว
ขั้นตอนที่ 8: การเชื่อมต่อ
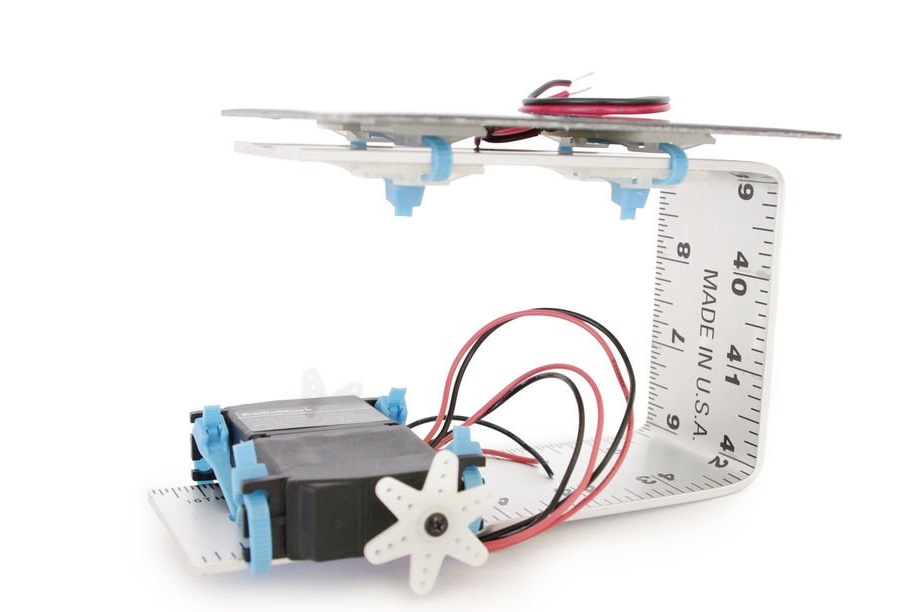
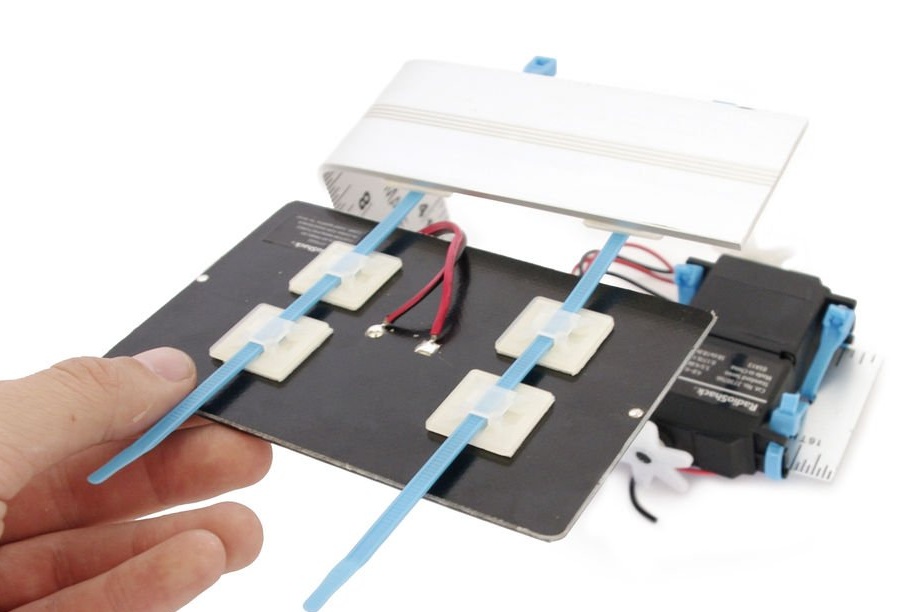
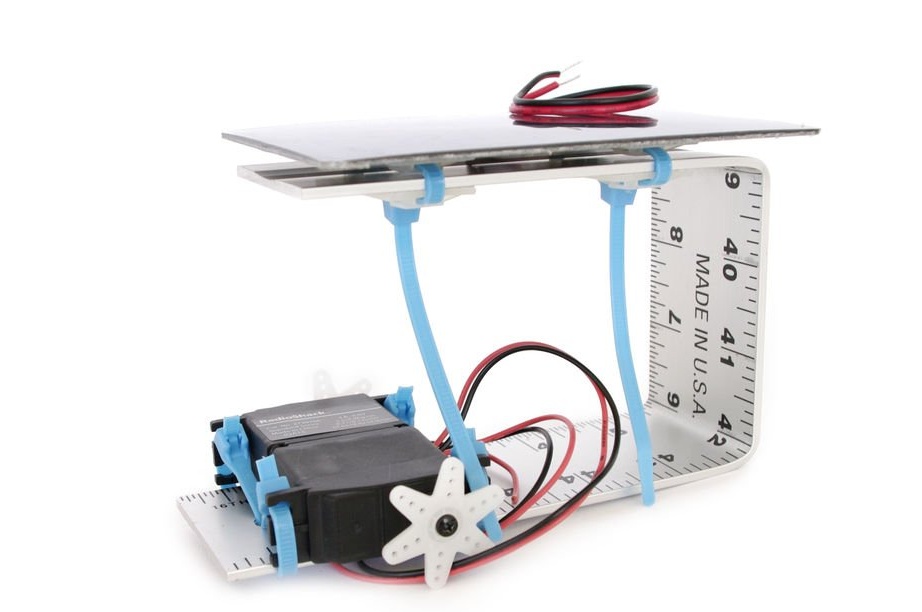
ยึดแผงโซลาร์เซลล์พร้อมที่หนีบผ่านฐานที่ตายตัว
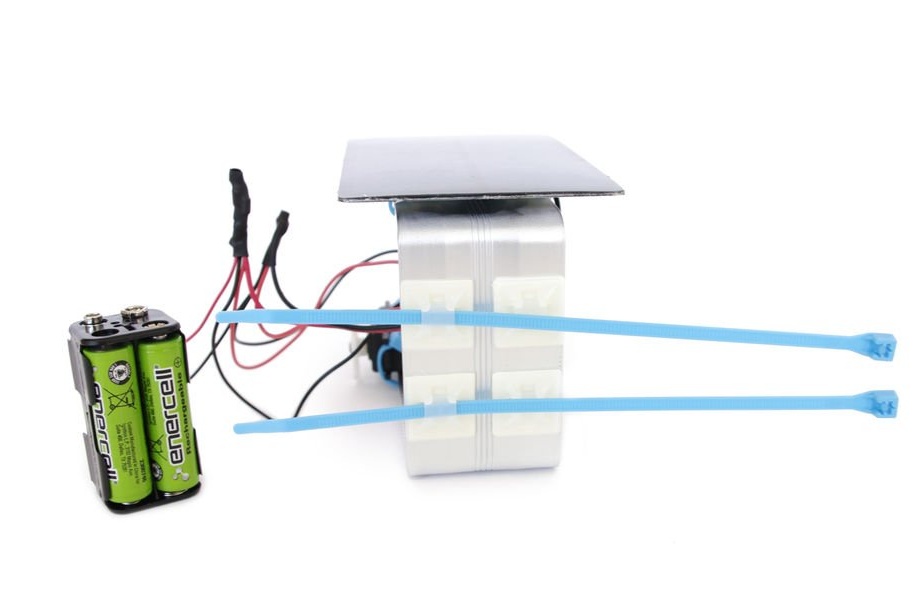
ขั้นตอนที่ 9: ใส่แบตเตอรี่


ใส่แบตเตอรี่ลงในก้อนแบตเตอรี่
ขั้นตอนที่ 10: ไดโอด

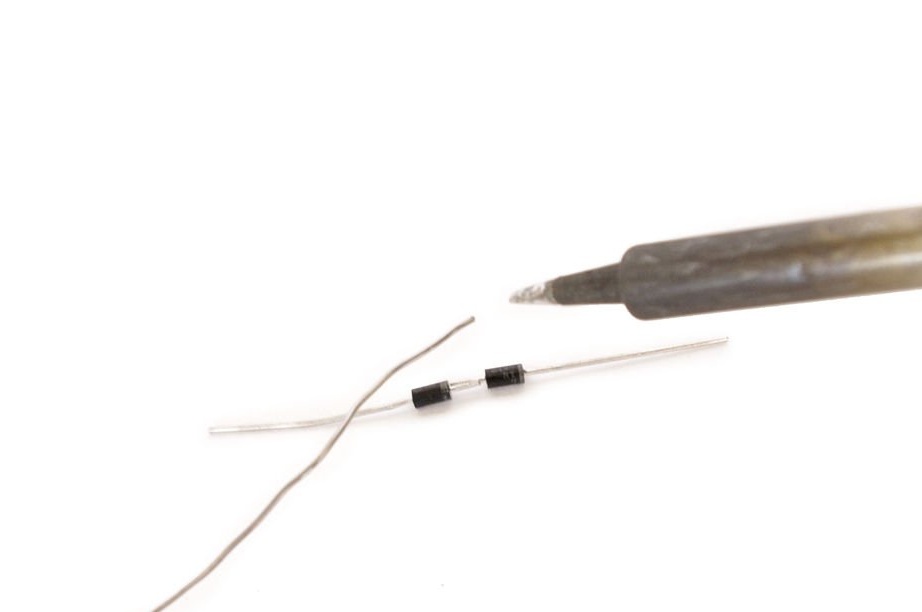
ประสานสองไดโอดพร้อมกับแคโทด (ด้านข้างของไดโอดกับแทร็ค)
ขั้นตอนที่ 11: การประกอบโซ่
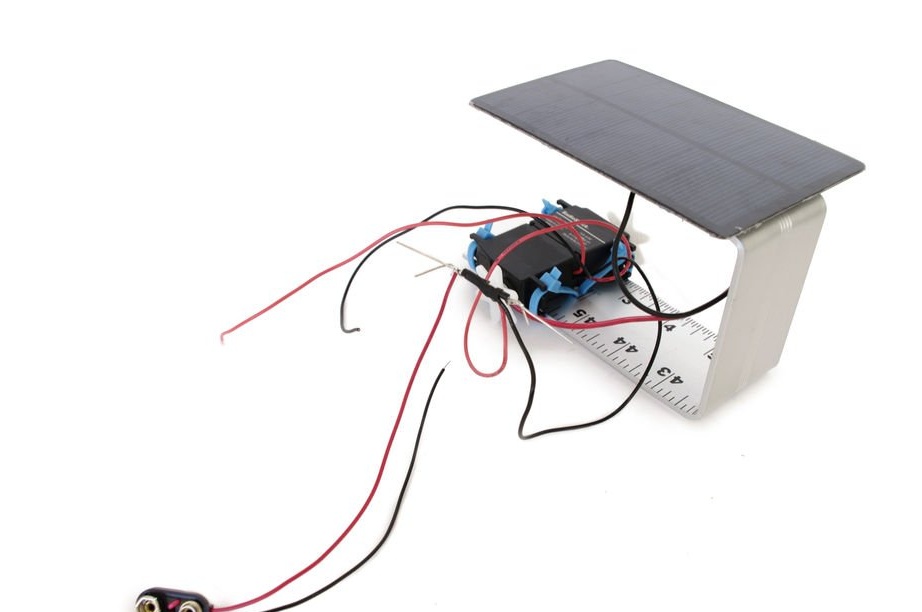
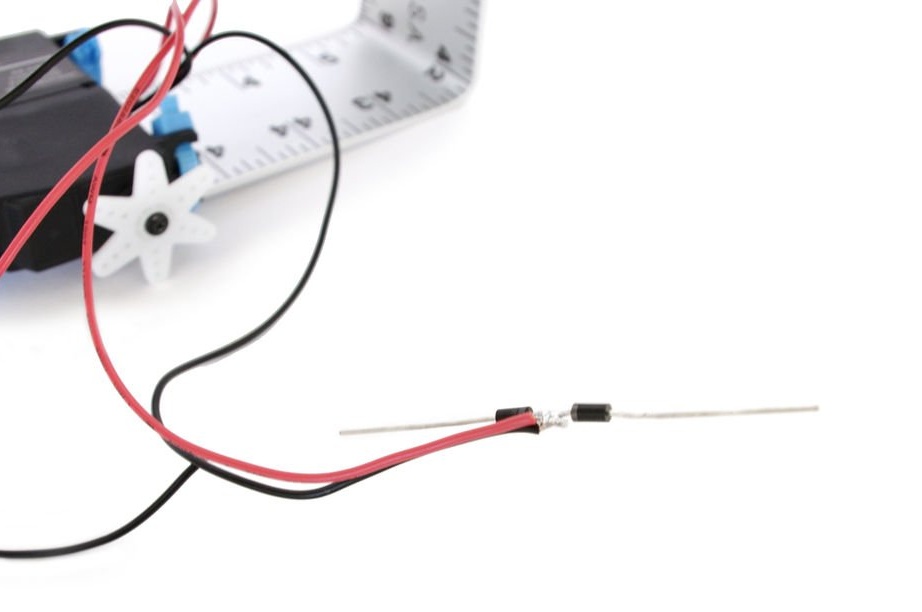
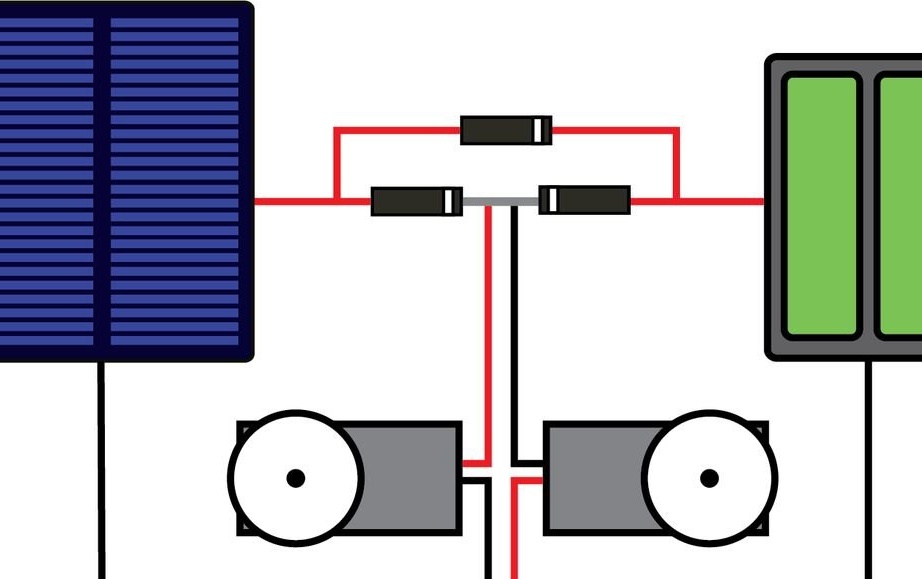
วงจรสำหรับหุ่นยนต์ตัวนี้ขึ้นอยู่กับวงจรการชาร์จพลังงานแสงอาทิตย์ที่เรียบง่ายของ David Cook วงจรประกอบด้วยไดโอด Schottky สองตัวที่เชื่อมต่อโดยแคโทดไปสู่แคโทดหนึ่งไดโอดที่เชื่อมต่อกับแผงโซลาร์เซลล์และหนึ่งในแบตเตอรี่ การกำหนดค่านี้ช่วยให้คุณสามารถขับเคลื่อนด้วยแบตเตอรี่และแผงเซลล์แสงอาทิตย์ขึ้นอยู่กับเงื่อนไข
เนื่องจากแบตเตอรี่ชาร์จไฟใหม่ไดโอด Schottky ที่สามจึงเชื่อมต่อโดยตรงจากแผงเซลล์แสงอาทิตย์ไปยังช่องใส่แบตเตอรี่เพื่อชาร์จแบตเตอรี่จากดวงอาทิตย์
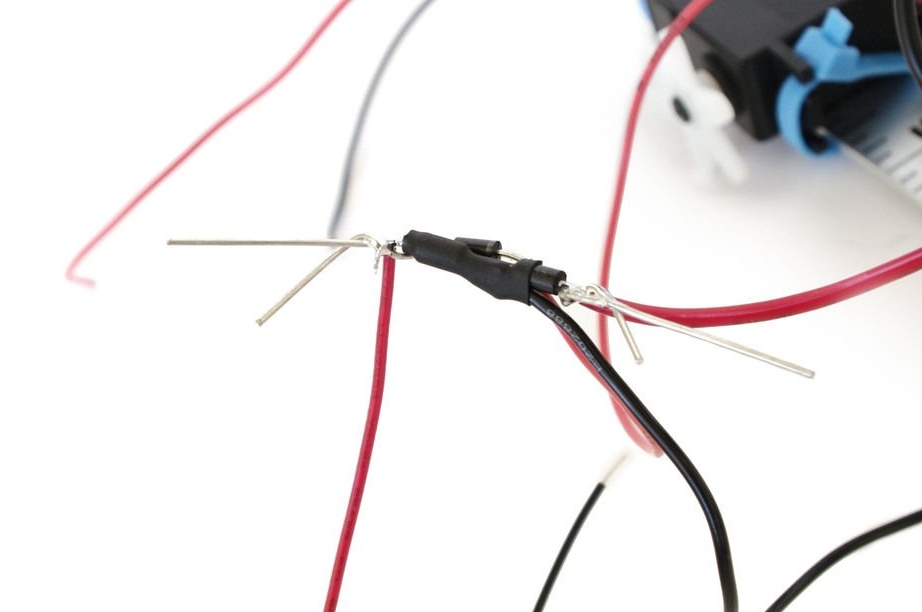
ในการเชื่อมต่อทั้งหมดให้เชื่อมต่อสายสีแดงจากหนึ่งในเซอร์โวและสายสีดำจากที่อื่นไปยังจุดกึ่งกลางของการเชื่อมต่อแคโทด
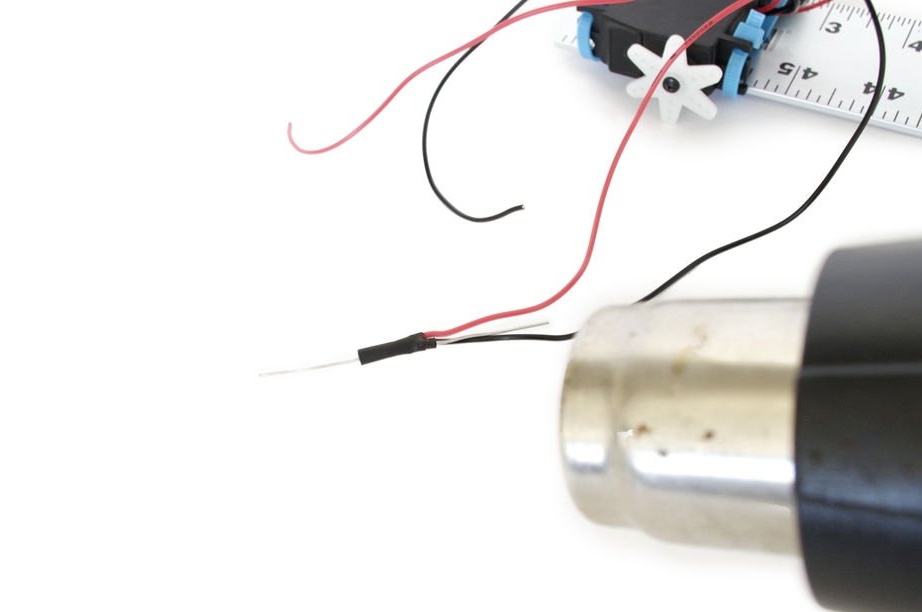
จากนั้นเชื่อมต่อสายสีแดงจากขั้วแบตเตอรี่เข้ากับขั้วบวกของไดโอด Schottky เชื่อมต่อสายสีแดงจากแผงโซลาร์เซลล์เข้ากับขั้วบวกของไดโอดอีกตัว
ตอนนี้ประสานขั้วบวกของไดโอดที่สามกับสายสีแดงที่เชื่อมต่อกับแผงเซลล์แสงอาทิตย์และแคโทดกับสายสีแดงจากขั้วแบตเตอรี่
พันสายไฟทั้งหมดด้วยท่อความร้อนเพื่อป้องกันวงจรจากการลัดวงจร
ขั้นตอนที่ 12: สายเพิ่มเติมบางอย่าง
ประสานสายไฟสีดำทั้งหมดและสายไฟสีแดงฟรีที่เหลือจากเซอร์โว
รับข้อต่อบัดกรีสองอัน หนึ่งสำหรับพลังงานและหนึ่งสำหรับดิน ห่อข้อต่อทั้งสองนี้ด้วยท่อหดความร้อนหรือเทปไฟฟ้า
ขั้นตอนที่ 13: และเหตุผลเพิ่มเติมสำหรับที่หนีบ
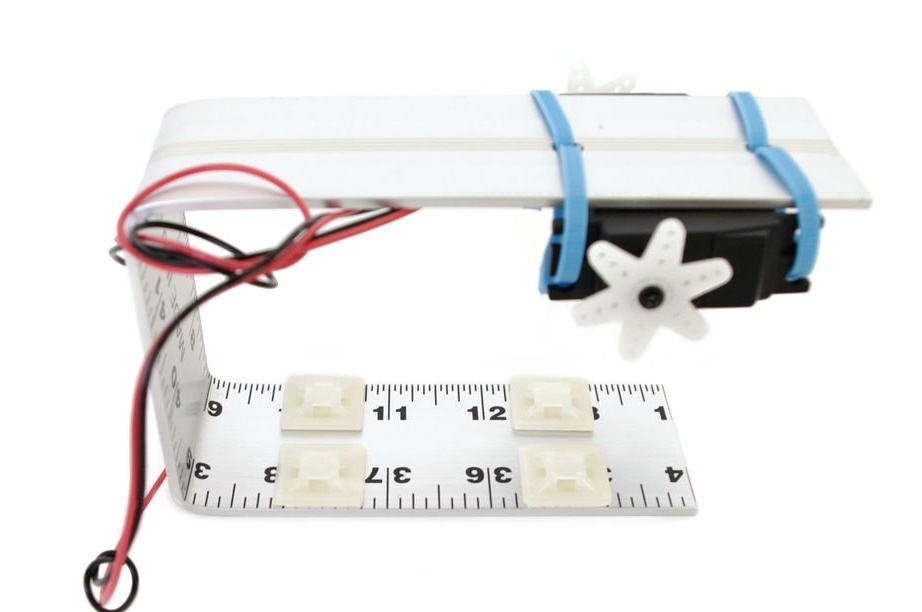
ยึดฐานสองคู่ไว้ที่ด้านล่างของไม้บรรทัดโค้งรูปตัวยู
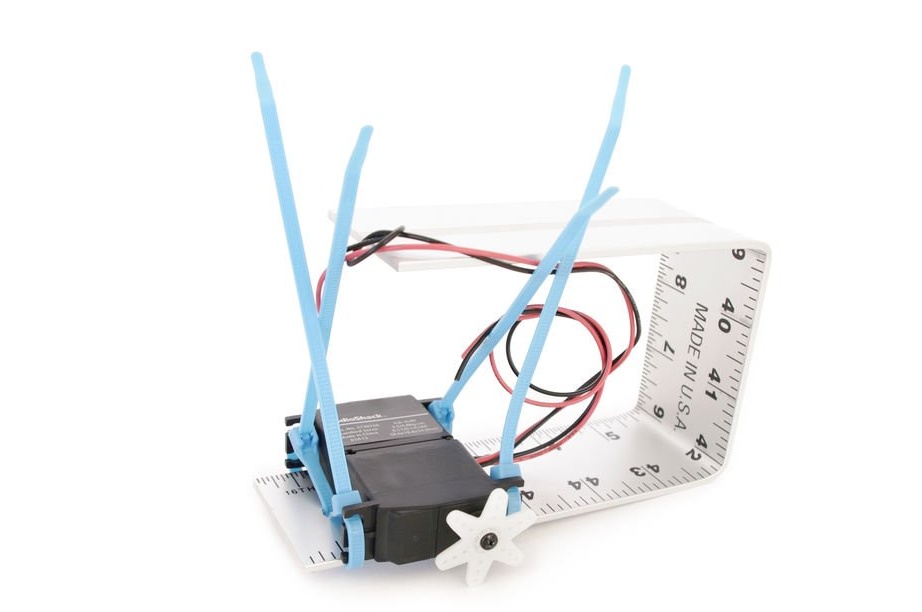
ขั้นตอนที่ 14: การรักษาความปลอดภัยแบตเตอรี่
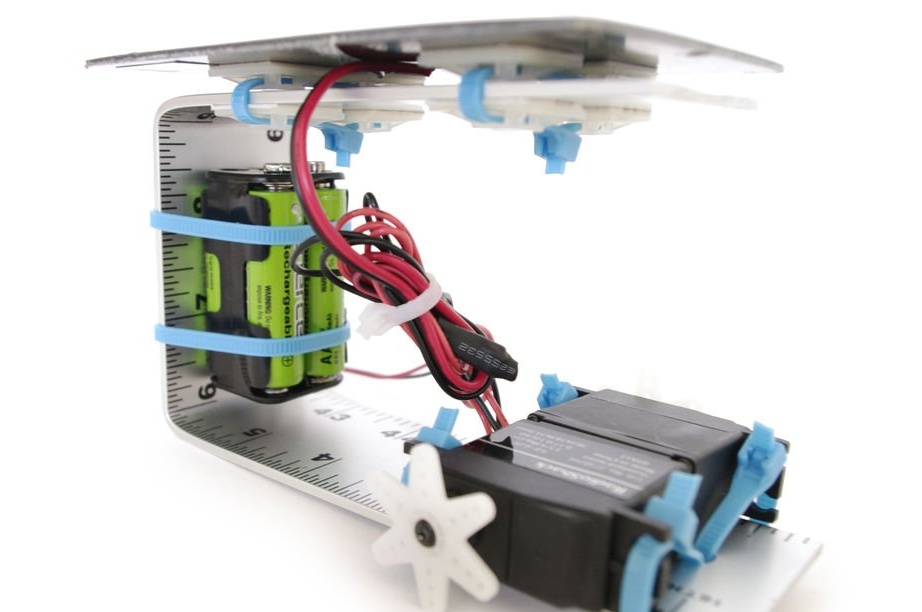
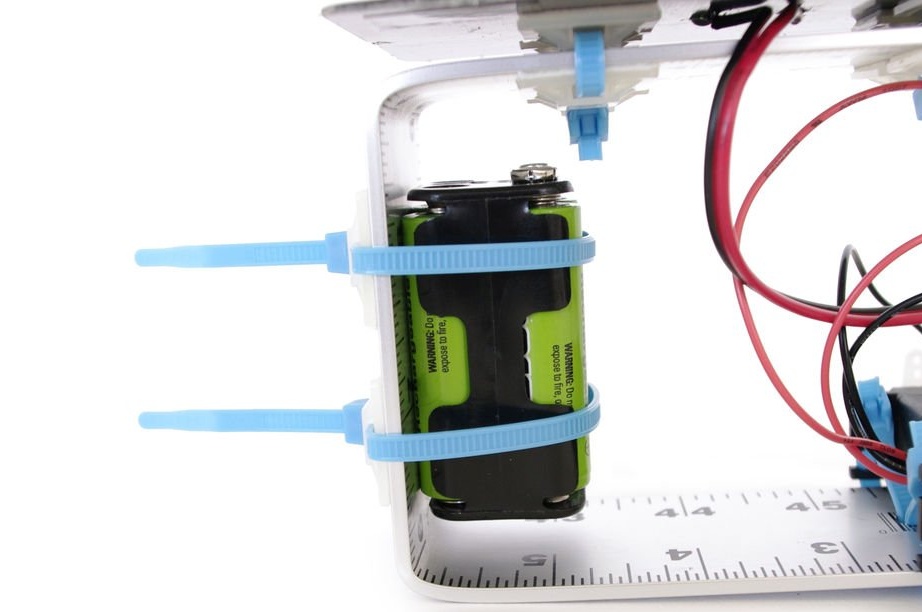
ยึดแบตเตอรี่ด้วยที่หนีบด้านในไม้บรรทัดรูปตัวยูเพื่อให้พวกเขานั่งอย่างมั่นคงและนิ่งเฉย
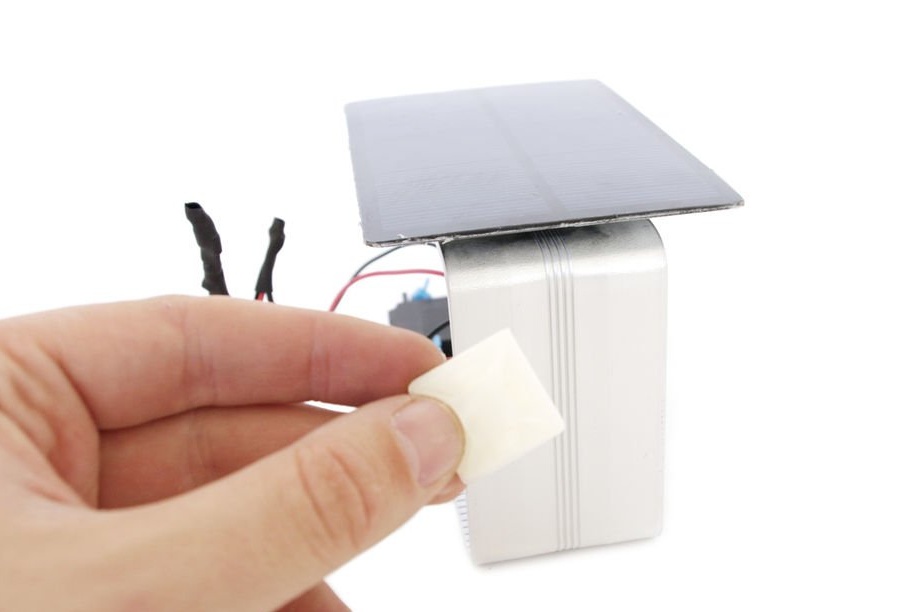
ขั้นตอนที่ 15: การเล็ม


ตัดตะขอบนตัวยึดผนังพลาสติก
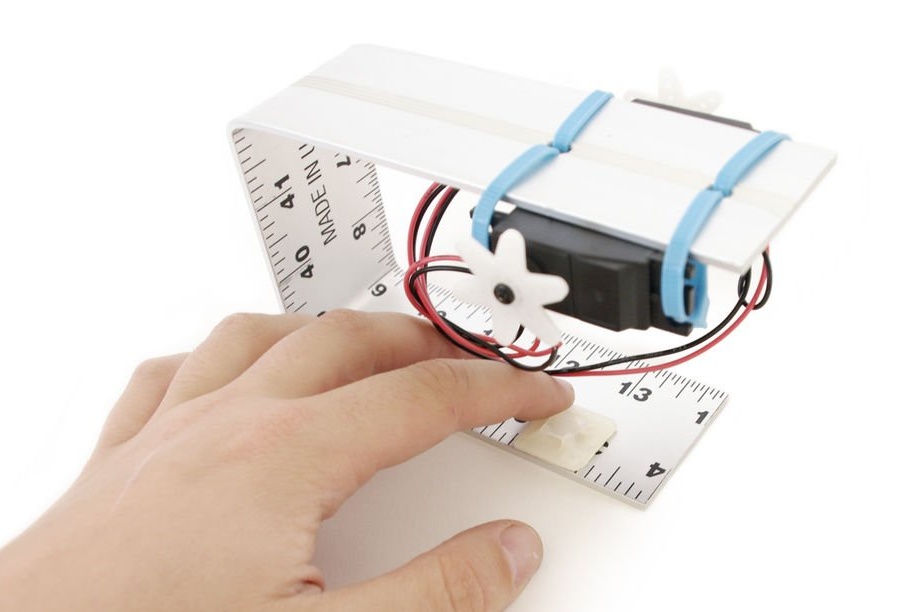
ขั้นตอนที่ 16: ล้อ
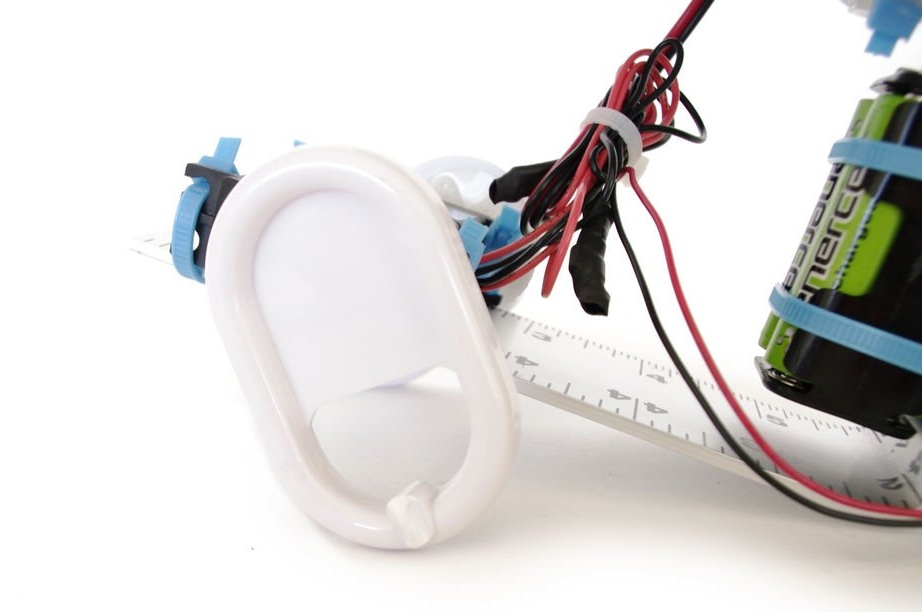
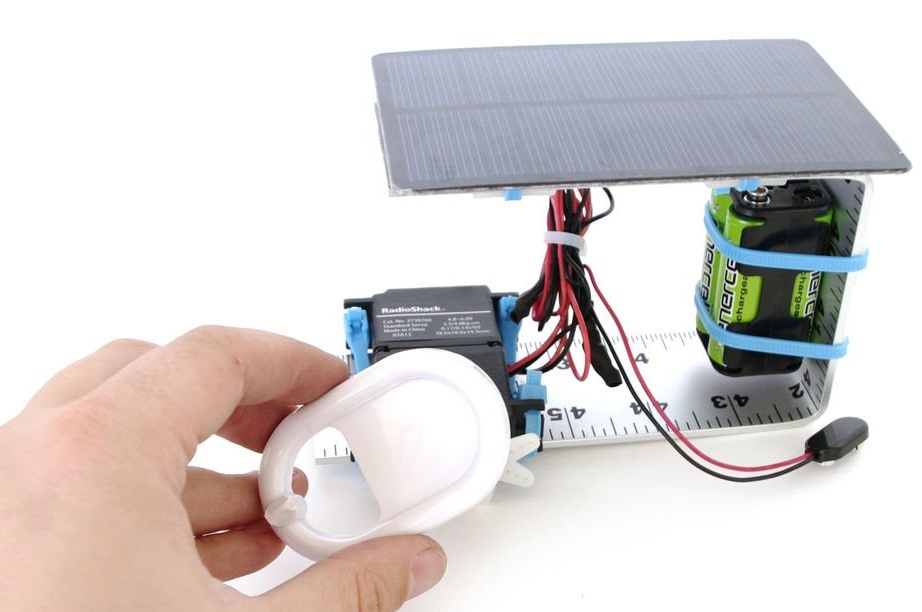
กาวติดผนังกับเกียร์ด้านนอกของเซอร์โว (นี่จะเป็นสิ่งที่เหมือนล้อ)
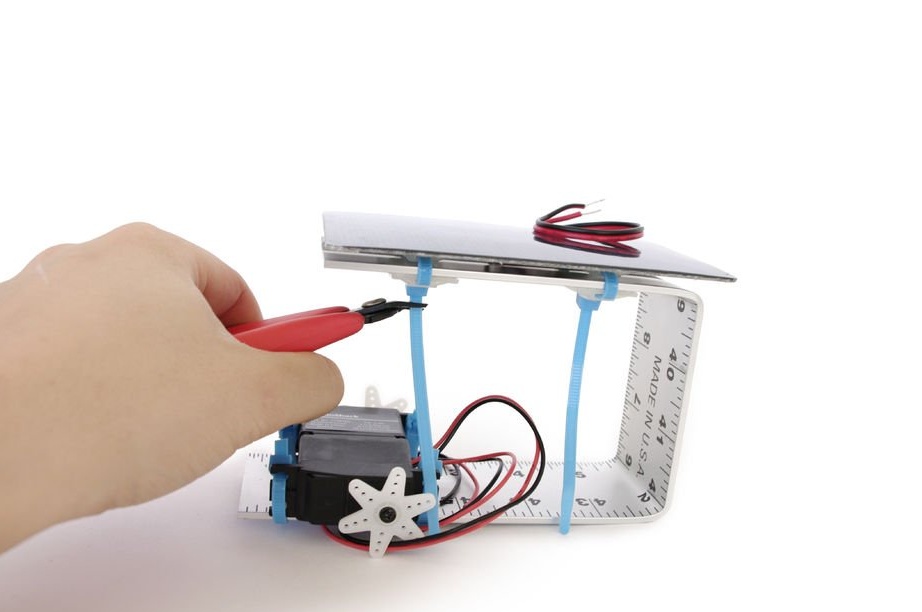
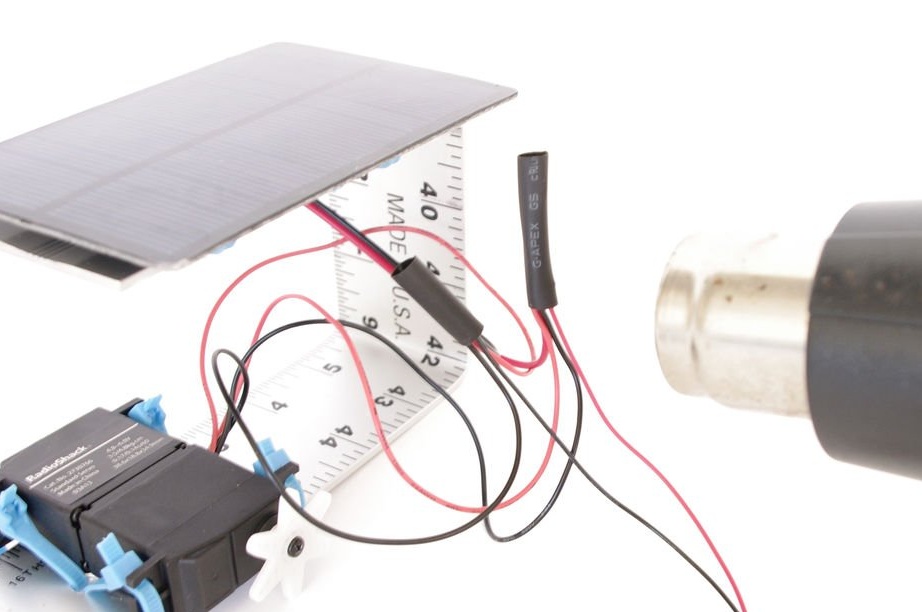
ขั้นตอนที่ 17: เปิด!

เชื่อมต่อสายพ่วงเข้ากับชุดแบตเตอรี่และหุ่นยนต์จะเริ่มเคลื่อนที่