
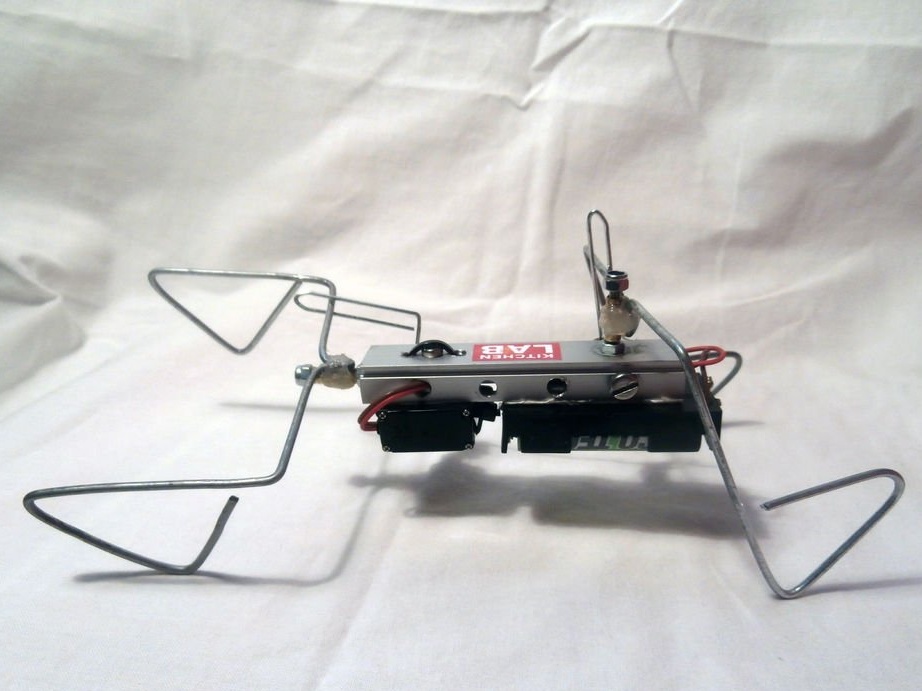
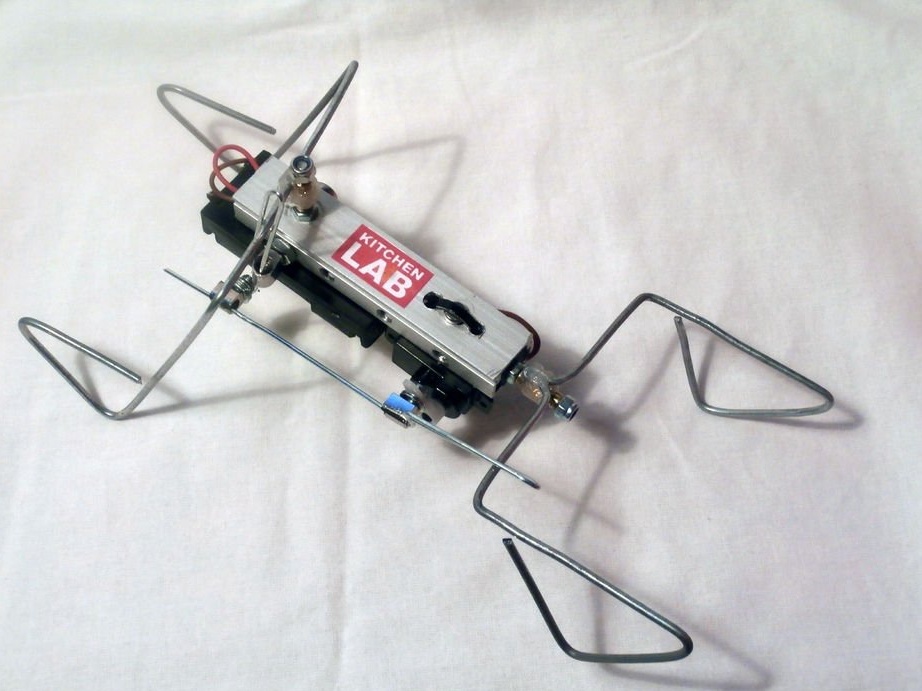
สวัสดีทุกคน! ฉันได้รับแรงบันดาลใจในการสร้างหุ่นยนต์ BEAM ของฉันโดยได้เห็นสิ่งมหัศจรรย์เครื่องยนต์เดี่ยวและเครื่องยนต์คู่ของหุ่นยนต์บนอินเทอร์เน็ตมากพอ ความคิดคือการสร้างหุ่นยนต์เดินโดยเดินในลักษณะเดียวกับ 1 หรือ 2 มอเตอร์บีมวอล์คเกอร์ หลังจากการทดลองที่ไม่ประสบความสำเร็จหลายครั้งฉันทำในสิ่งที่ฉันต้องการ!
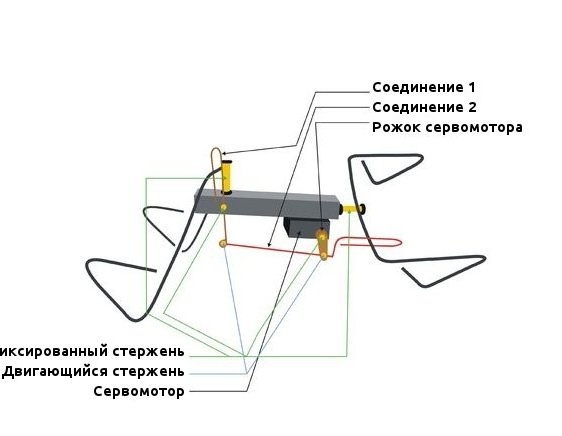
ขั้นตอนที่ 1: กลไก
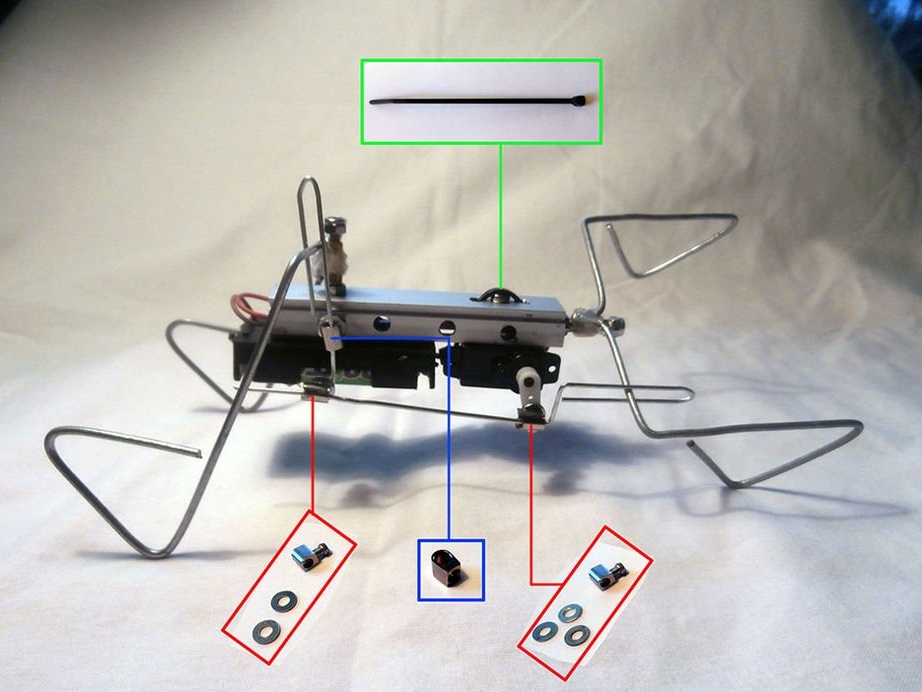
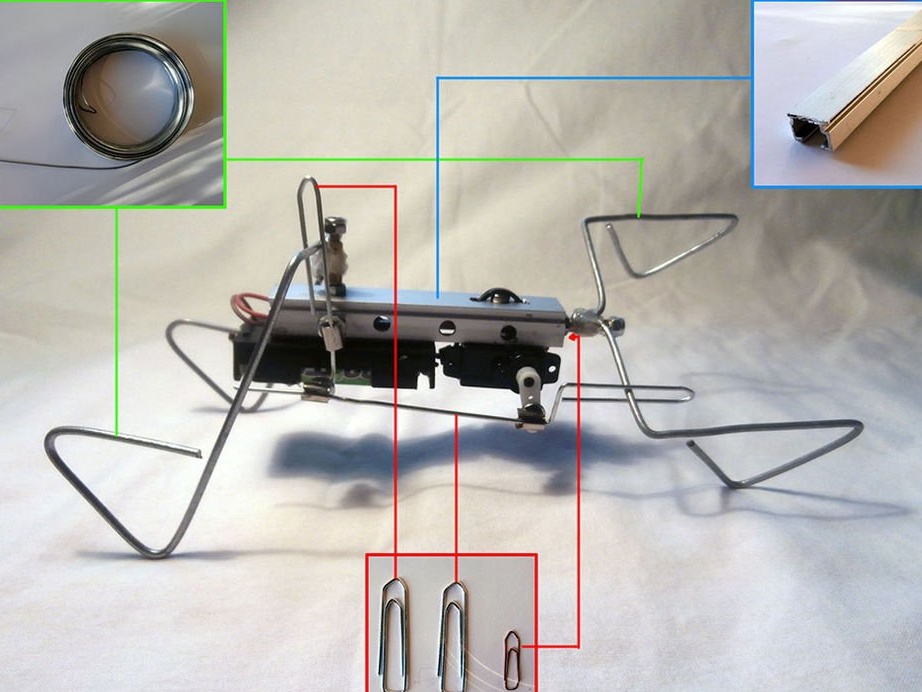
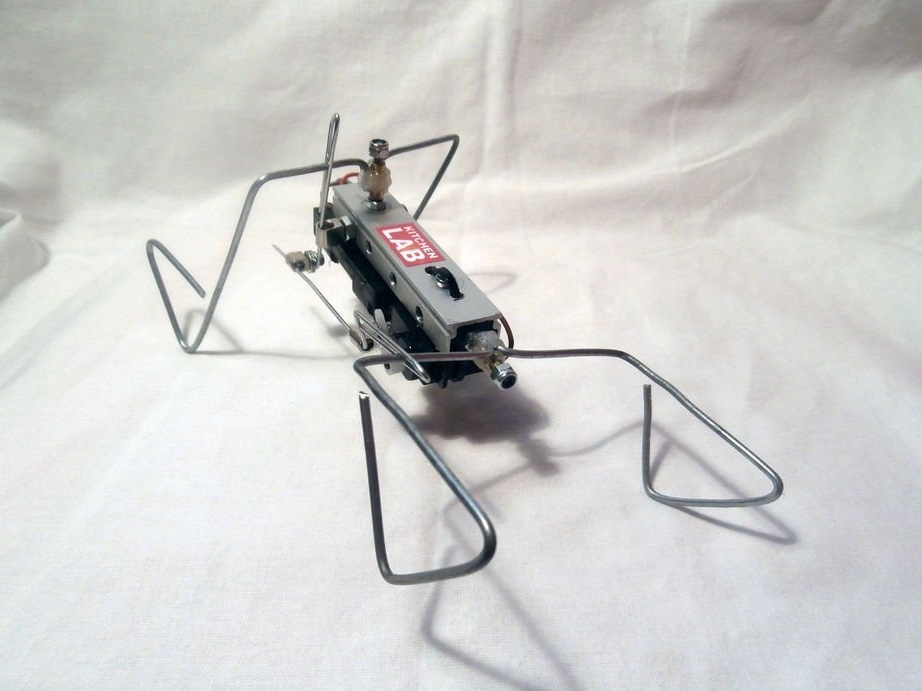
ขั้นตอนที่ 2: อะไหล่ที่จำเป็น

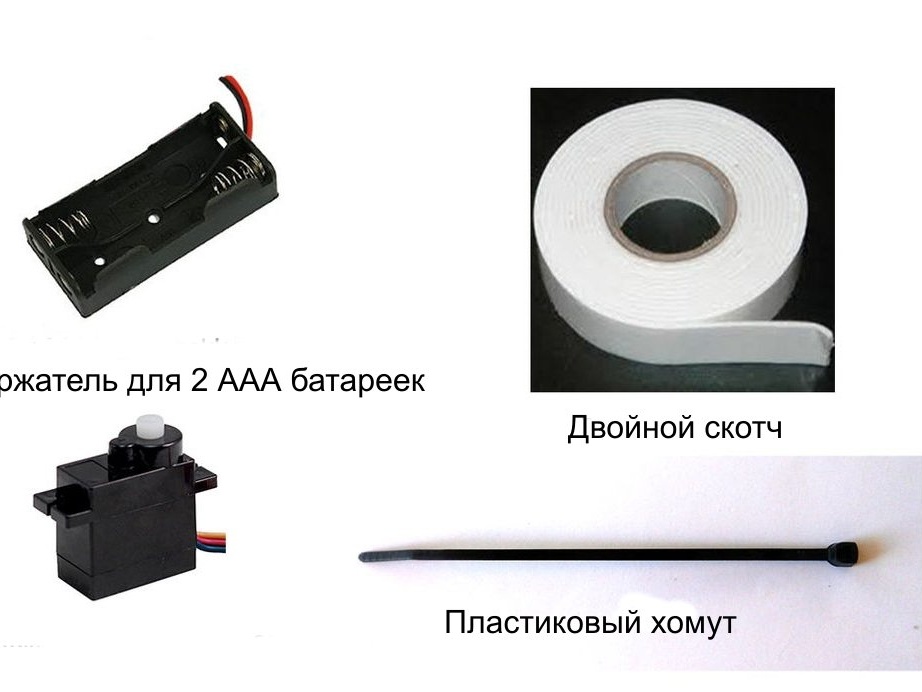



(1x) เซอร์โวหมุนต่อเนื่อง
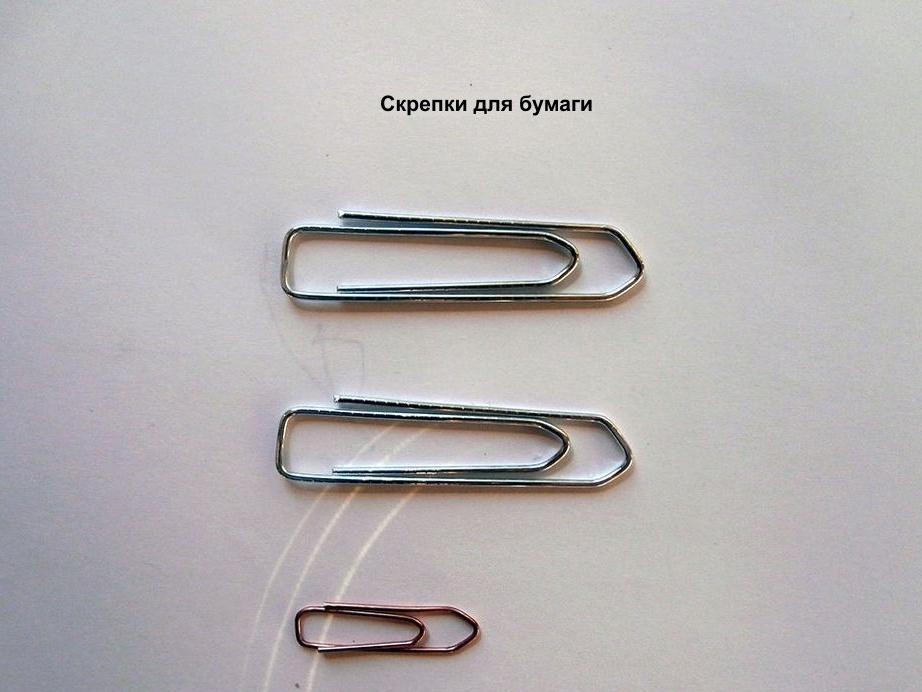
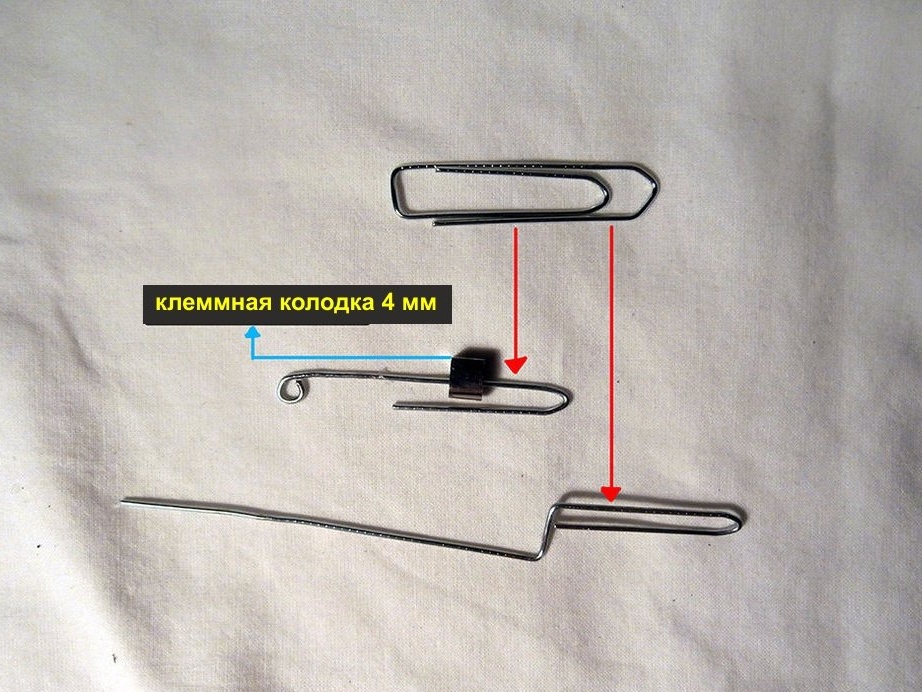
(2x) คลิปหนีบกระดาษขนาดใหญ่
(1x) คลิปหนีบกระดาษขนาดเล็ก
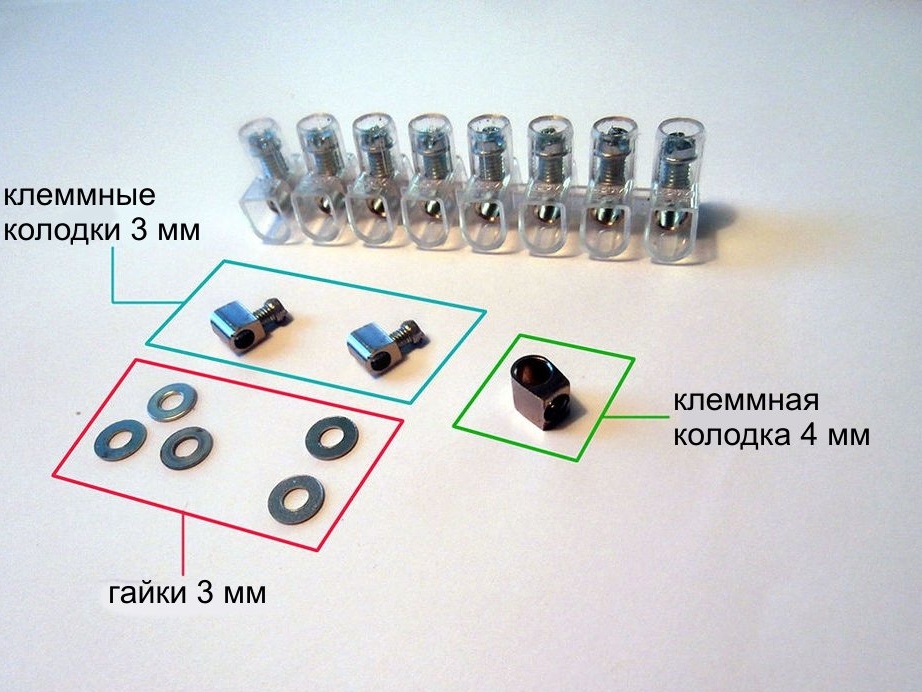
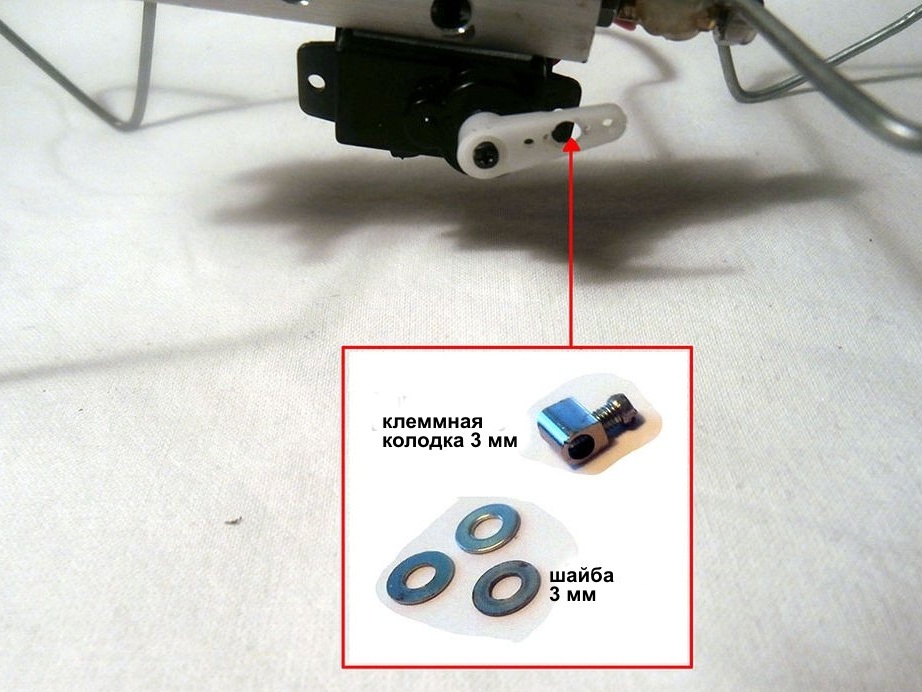
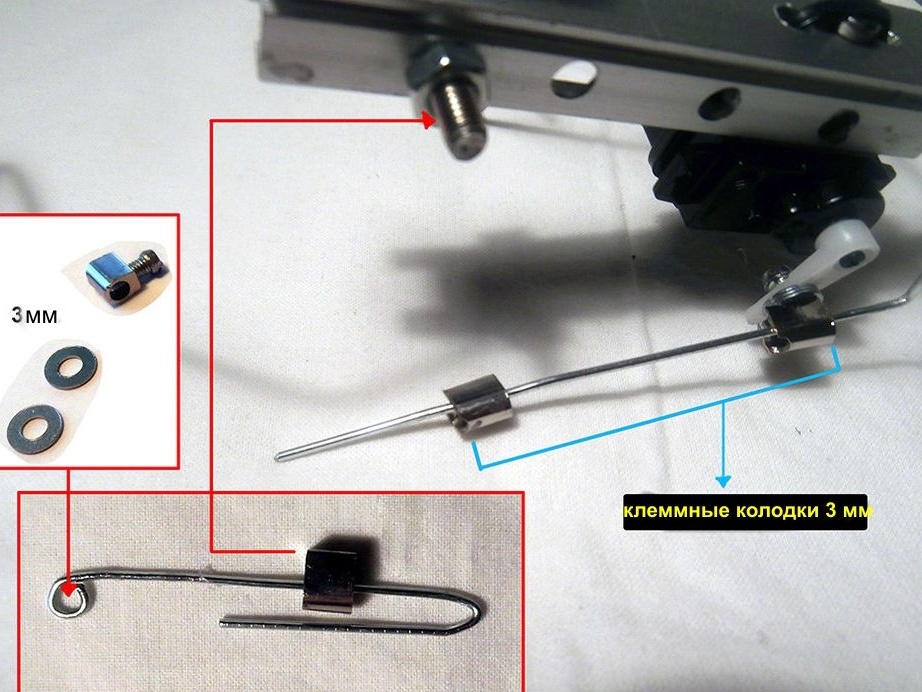
(2x) เทอร์มินัลบล็อก (3mm)
(1x) เทอร์มินัลบล็อก (4mm)
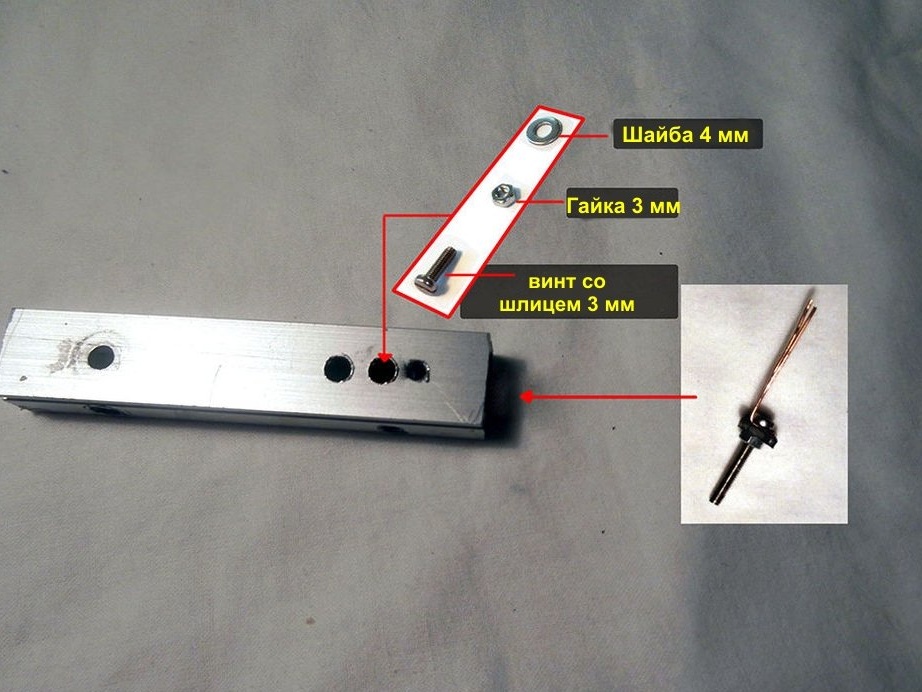
(1X) บล็อกโปรไฟล์อลูมิเนียมที่ใช้
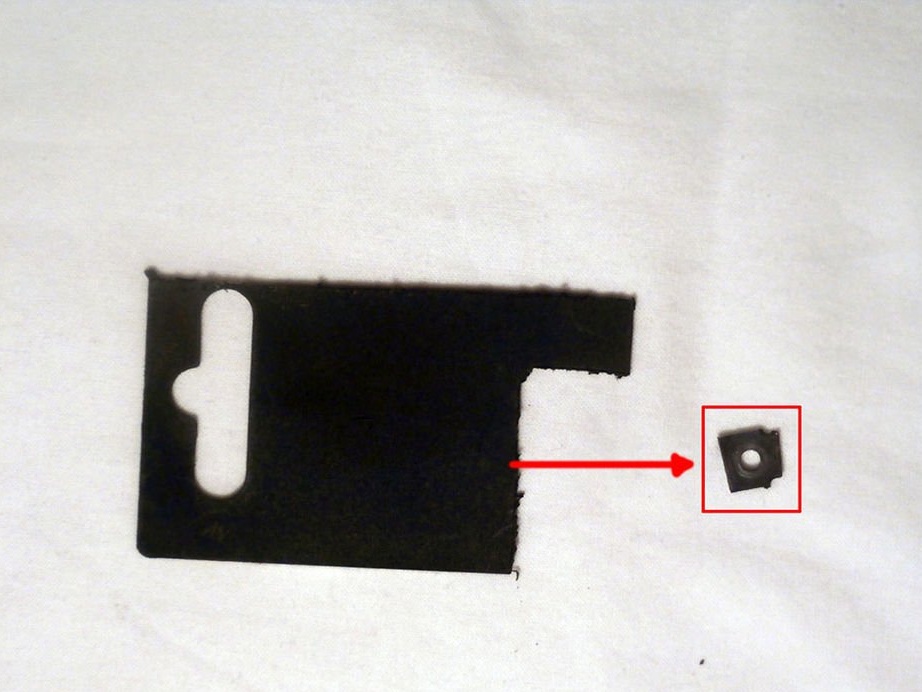
ชิ้นส่วนพลาสติก (1X)
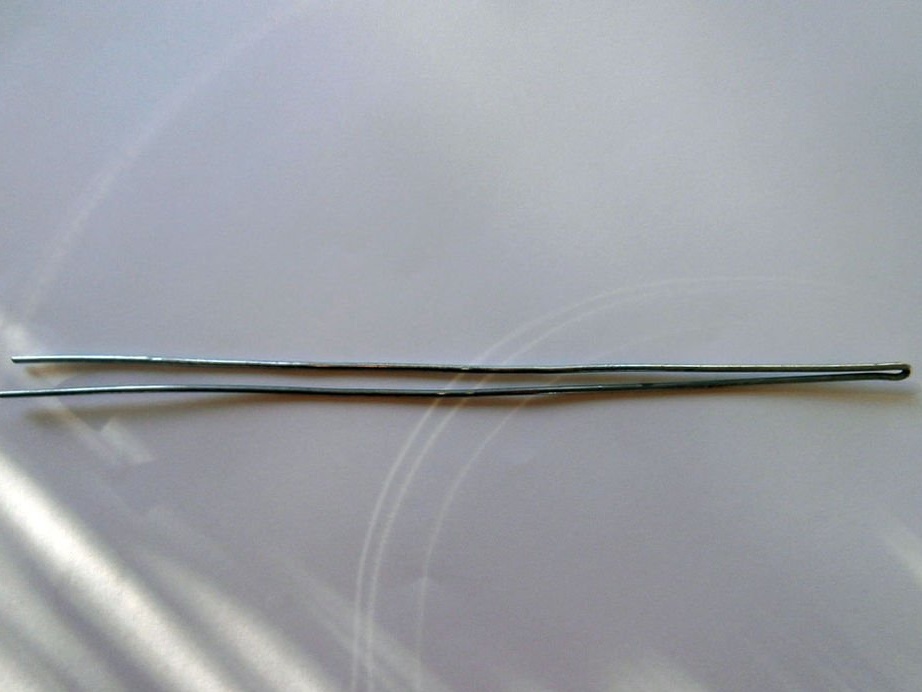
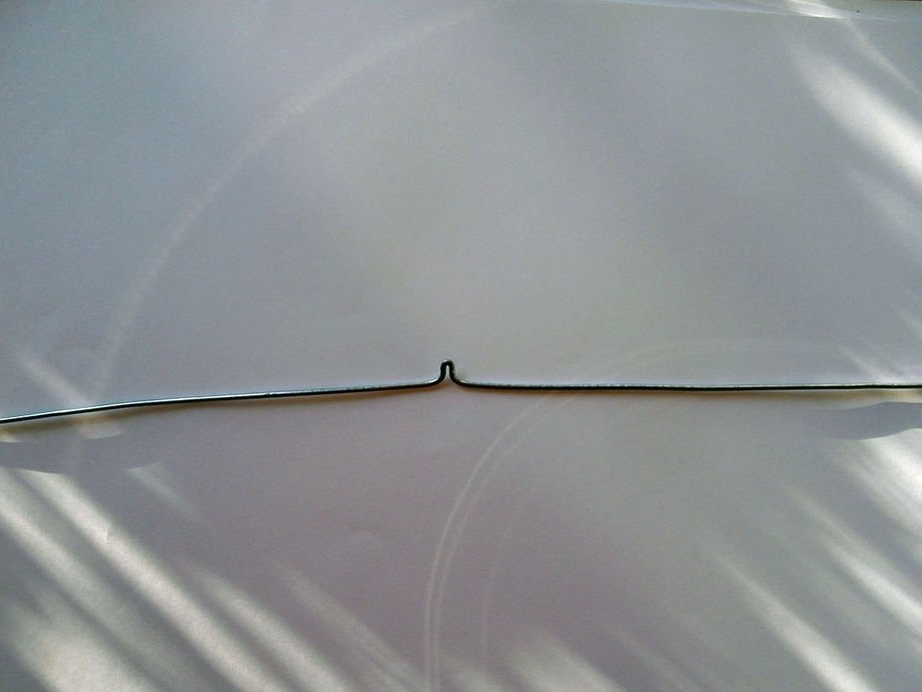
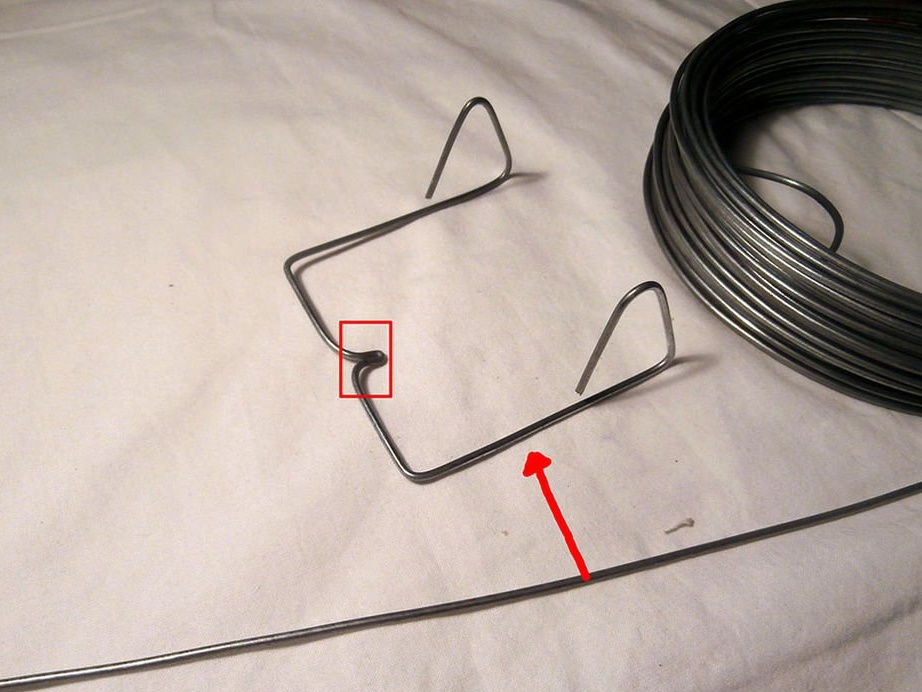
ลวดเหล็ก (2 มม.)
เทปกาวสองชั้น
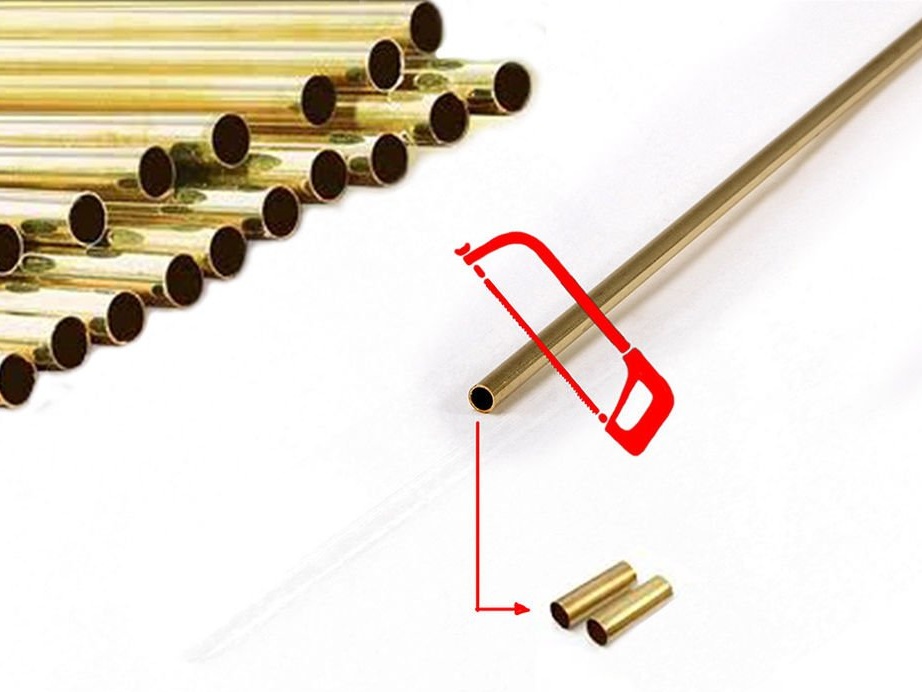
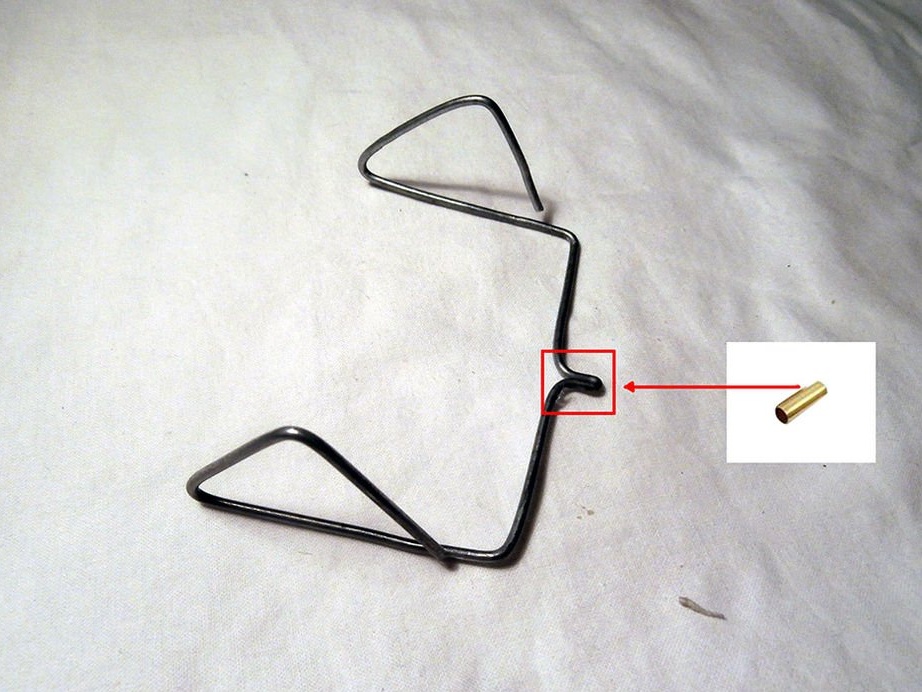
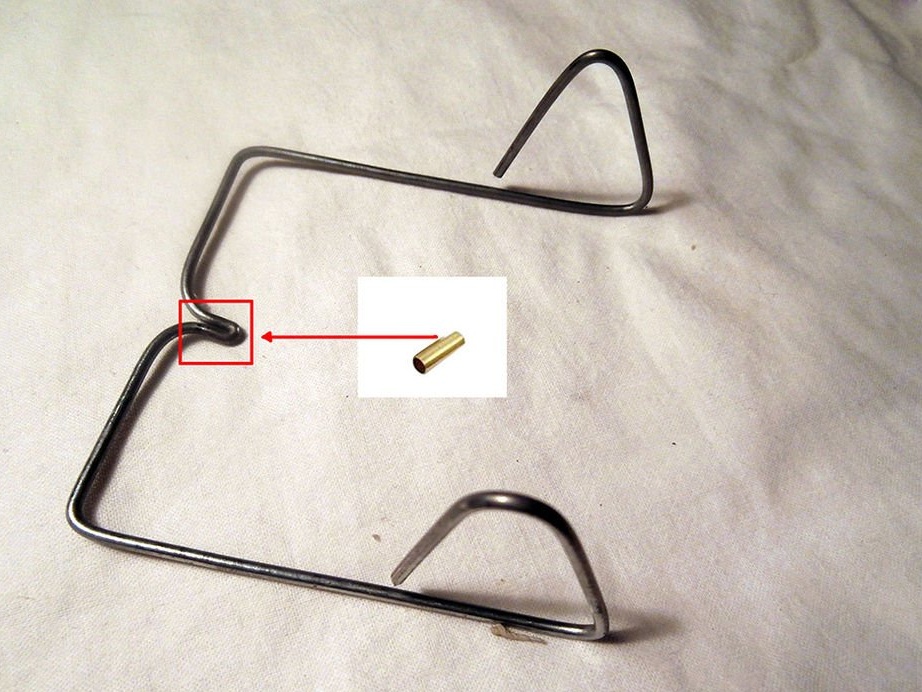
ท่อทองเหลือง
(1X) แคลมป์ขนาดเล็ก
ก้อนแบตเตอรี่ (1X) (2 x AAA)
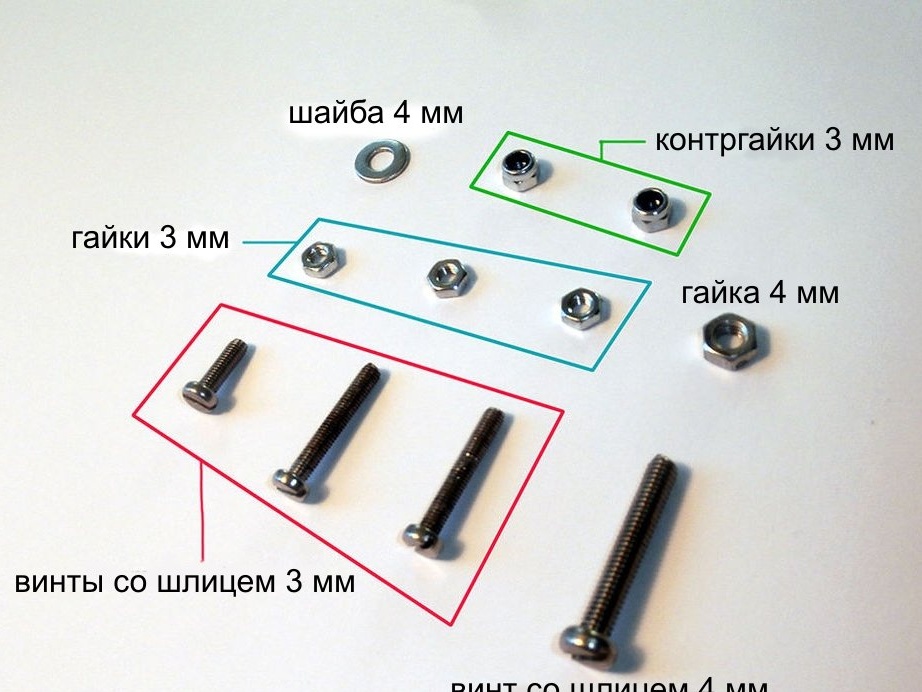
(2X) ล็อคน็อต (3 มม.)
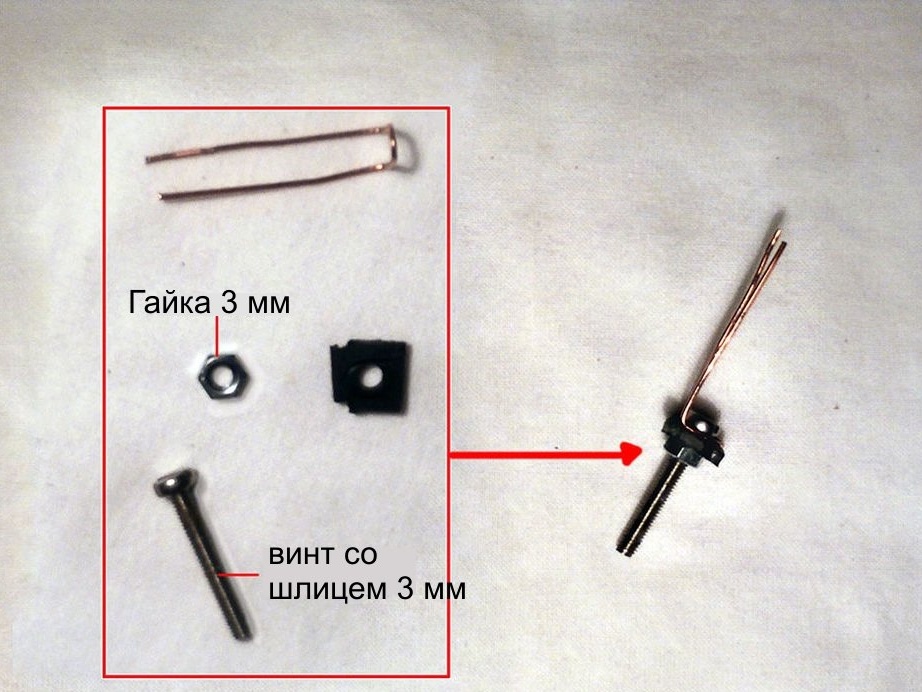
(3X) น็อตและสกรู (3 มม.)
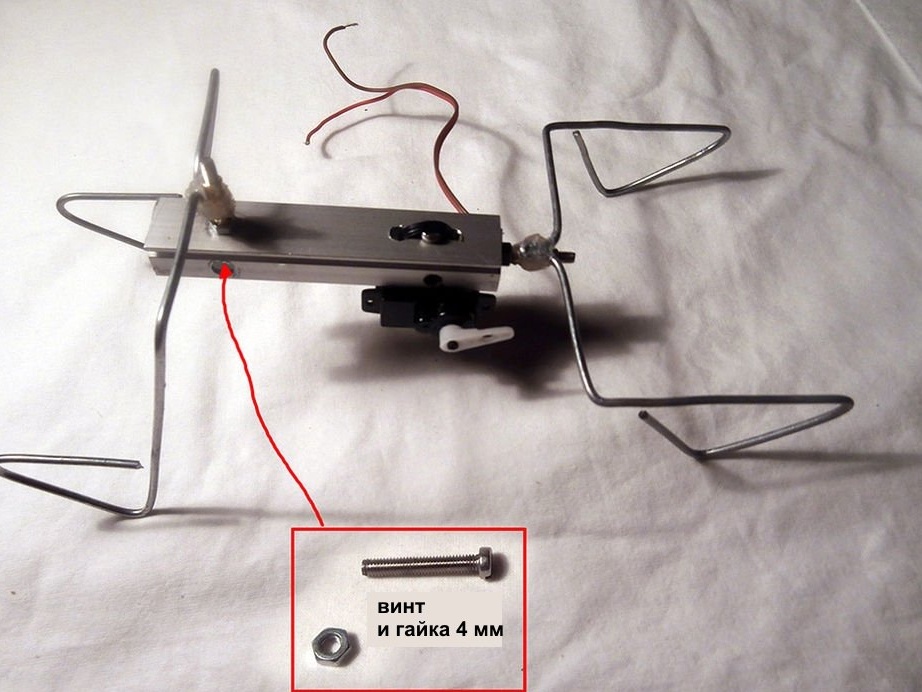
(1x) น็อตและสกรู (4 มม.)
(5x) เครื่องซักผ้า (3mm)
เครื่องซักผ้า (1X) (4mm)
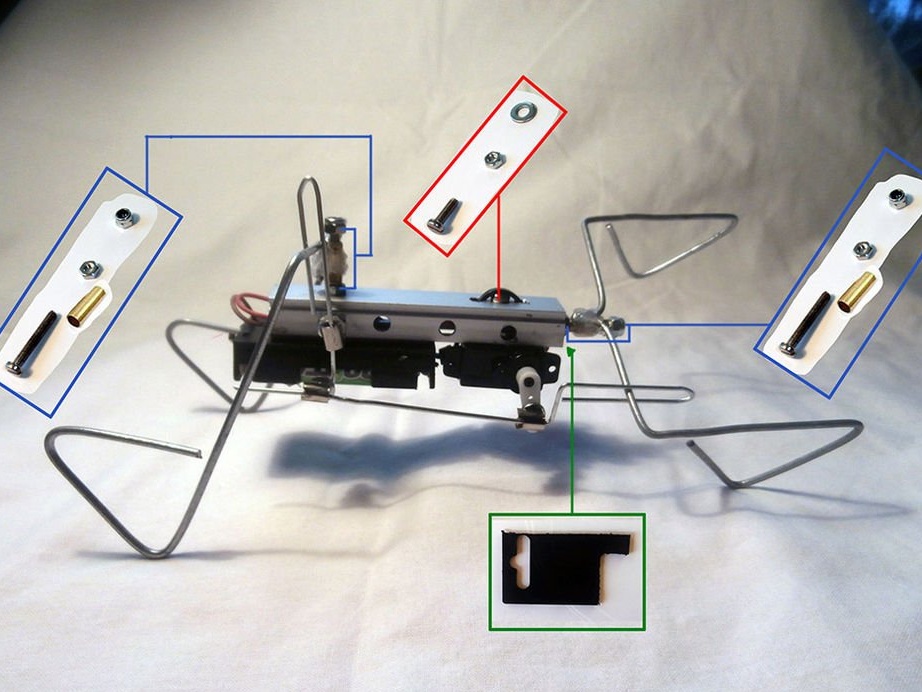
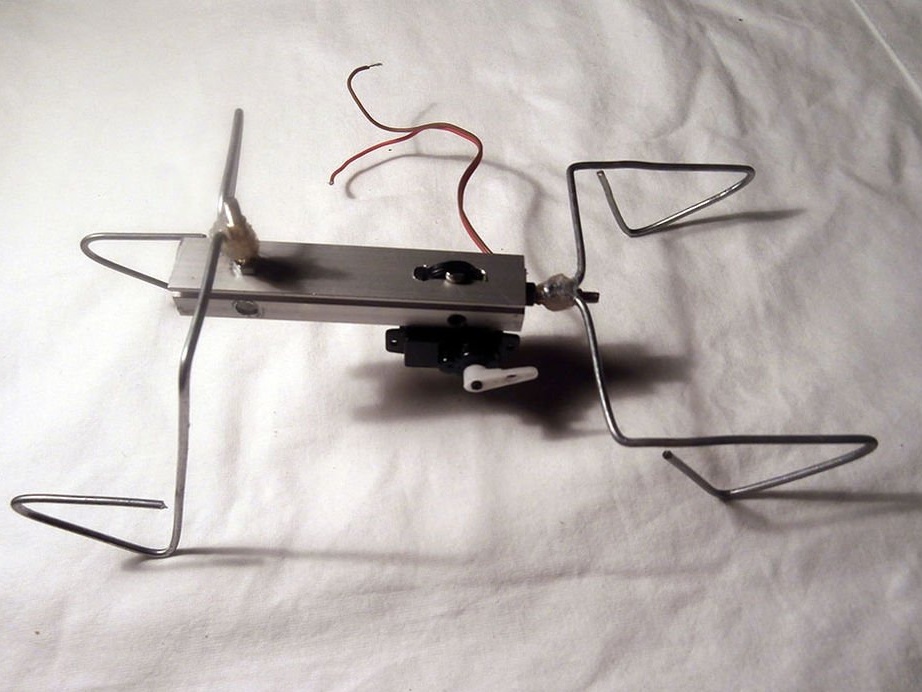
ขั้นตอนที่ 3: การประกอบชิ้นส่วน
ขั้นตอนที่ 4: เครื่องมือ
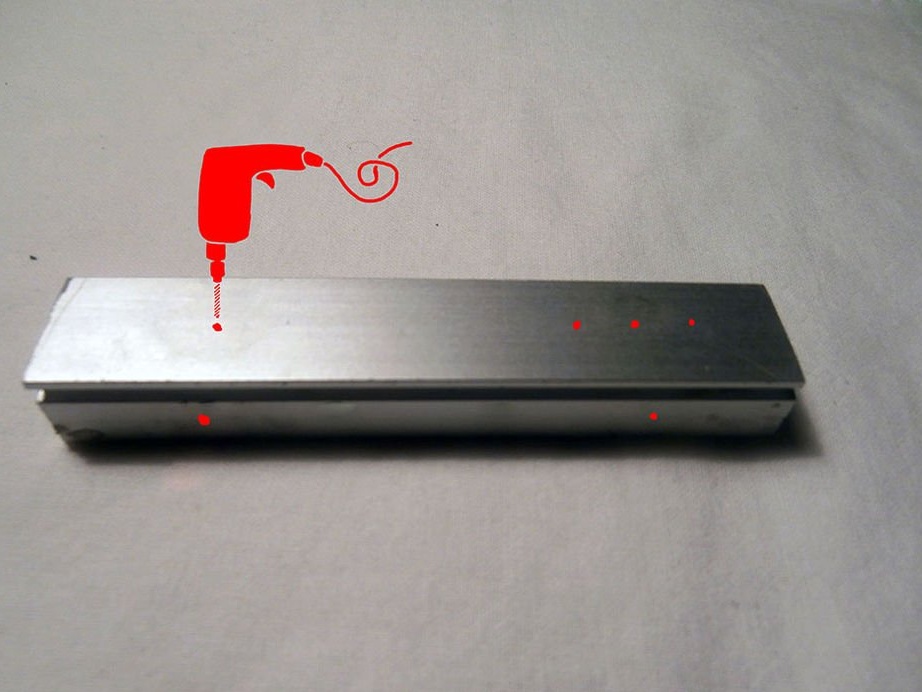
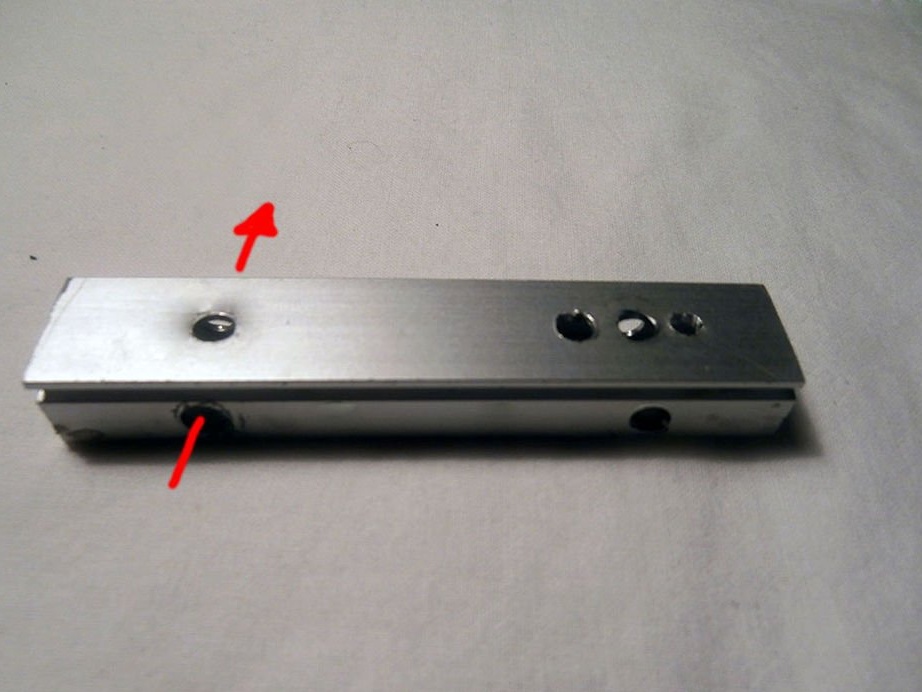
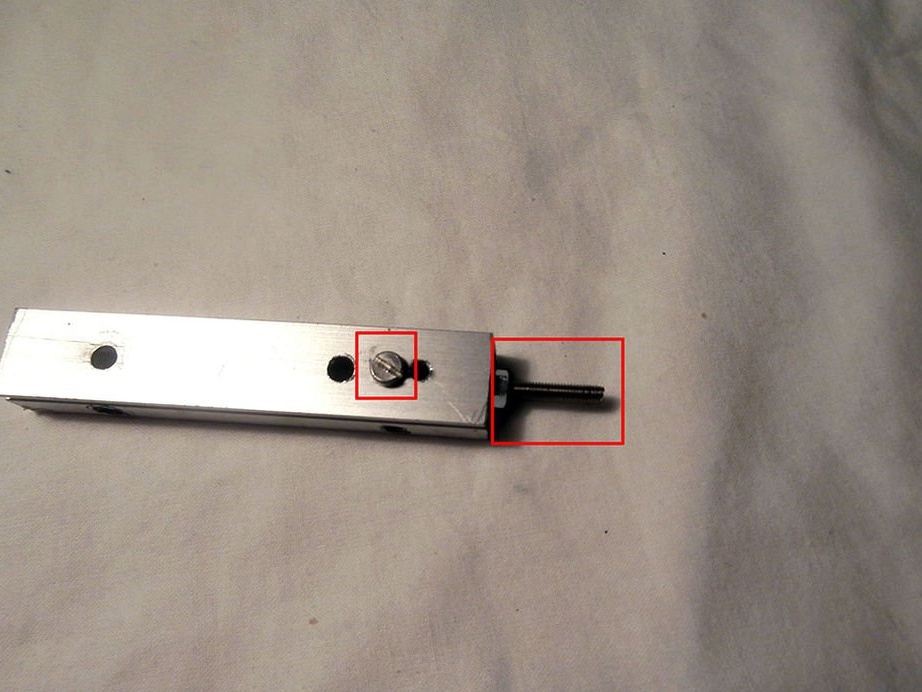
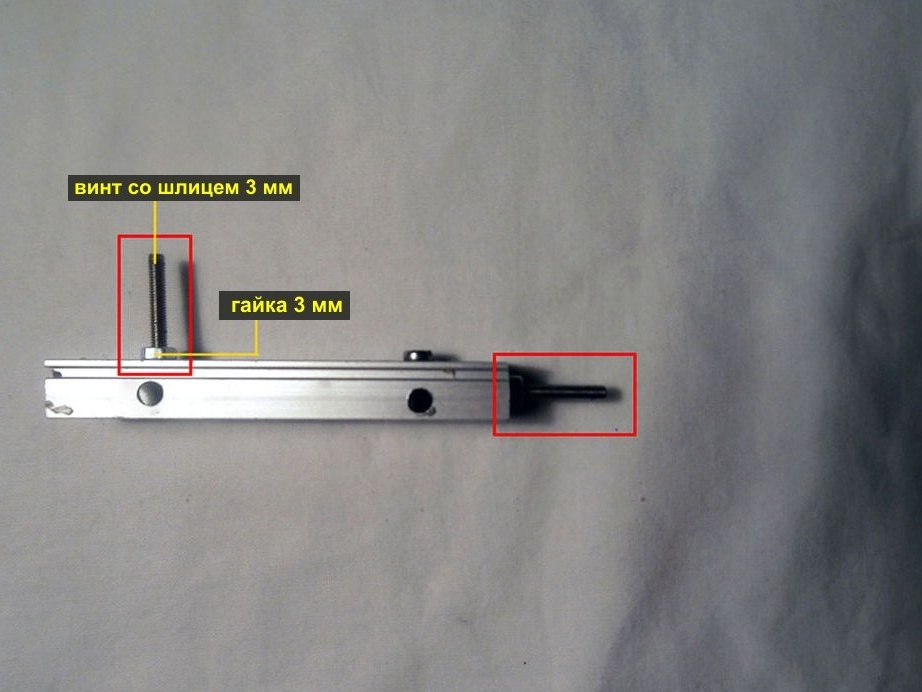
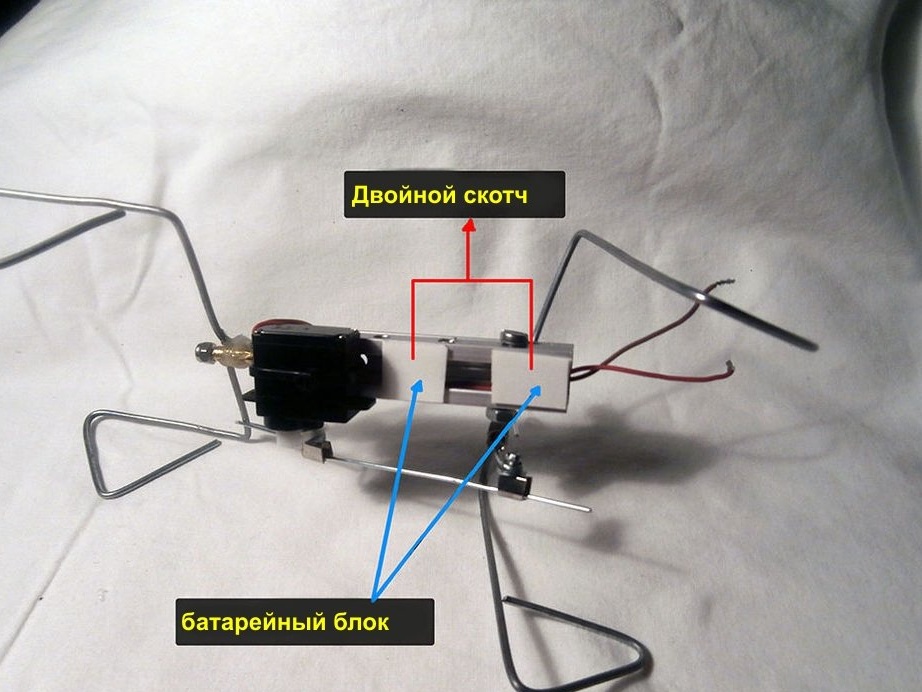
ขั้นตอนที่ 5: ที่อยู่อาศัย

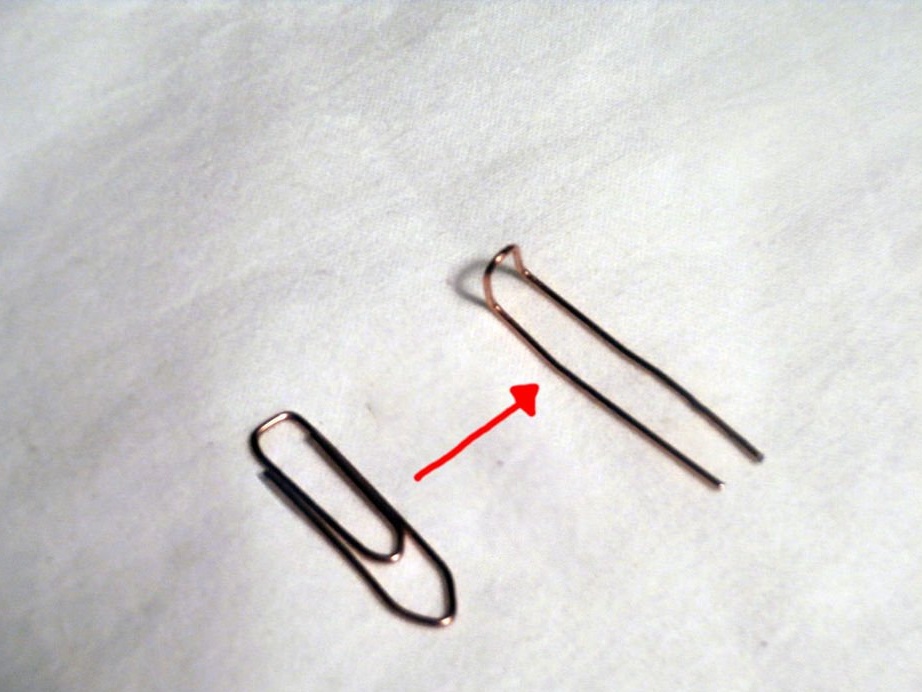

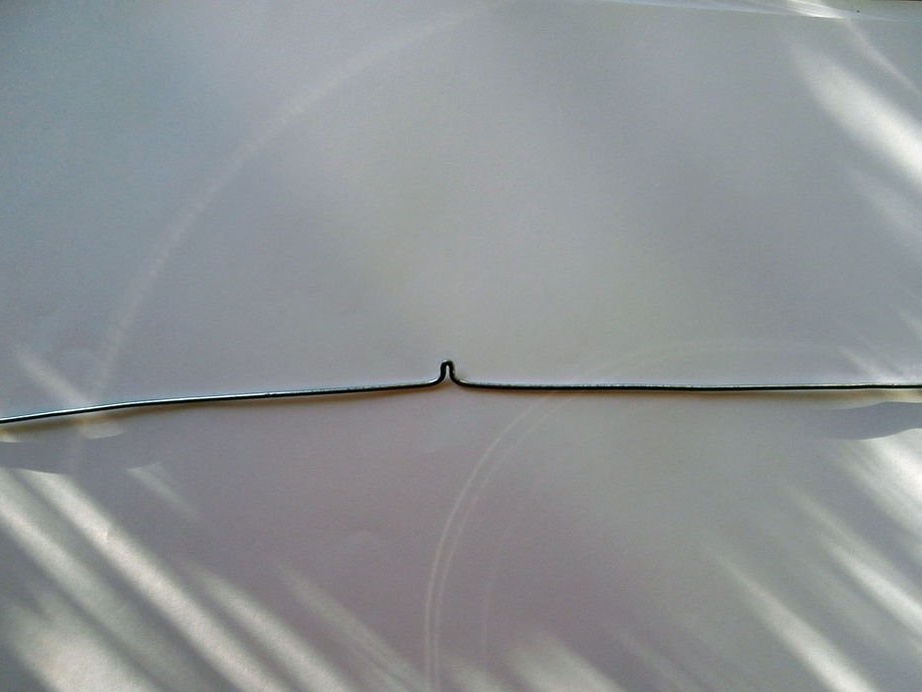
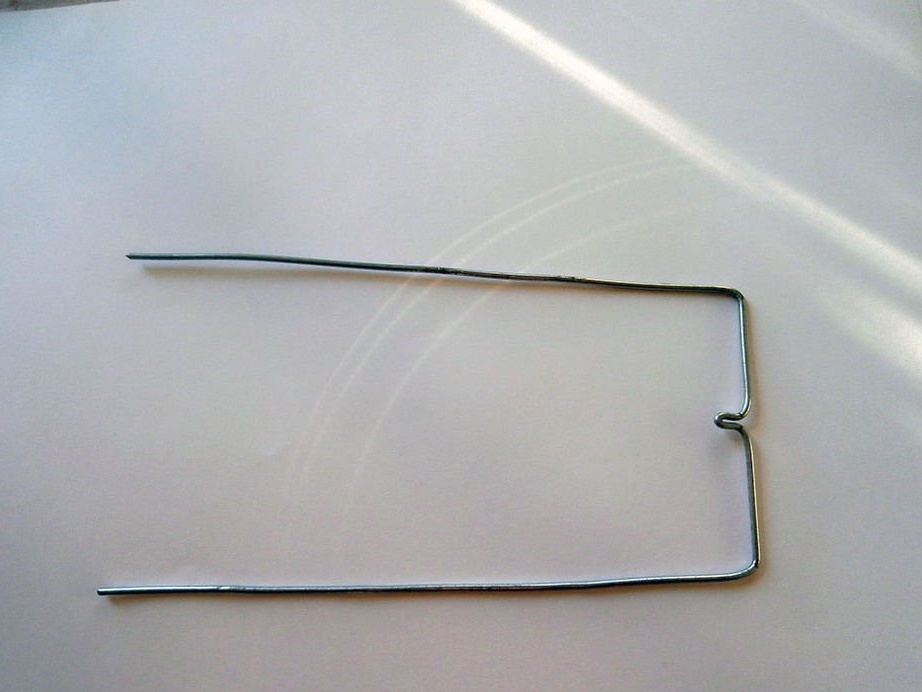
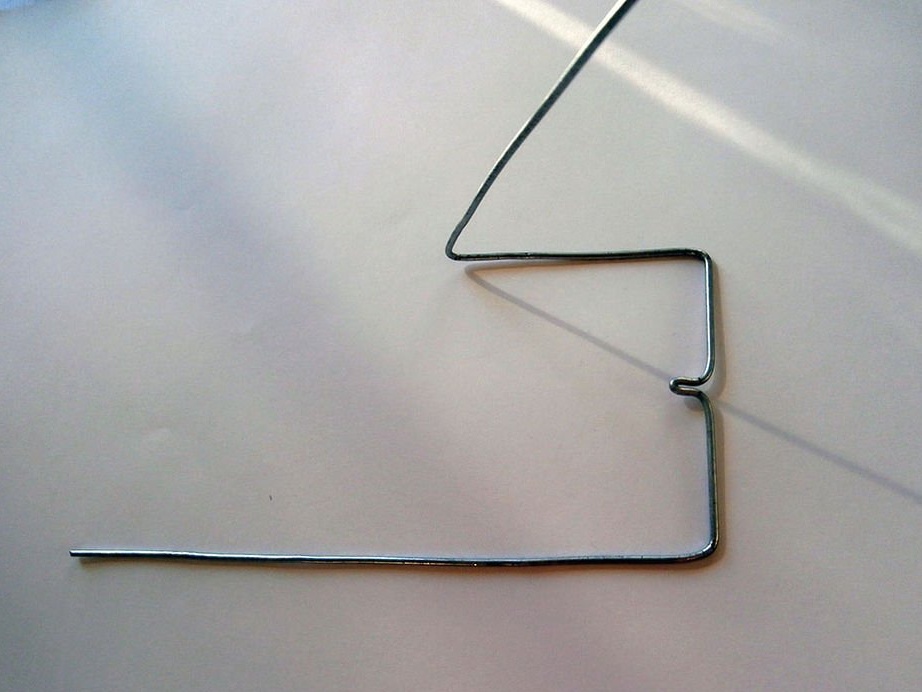
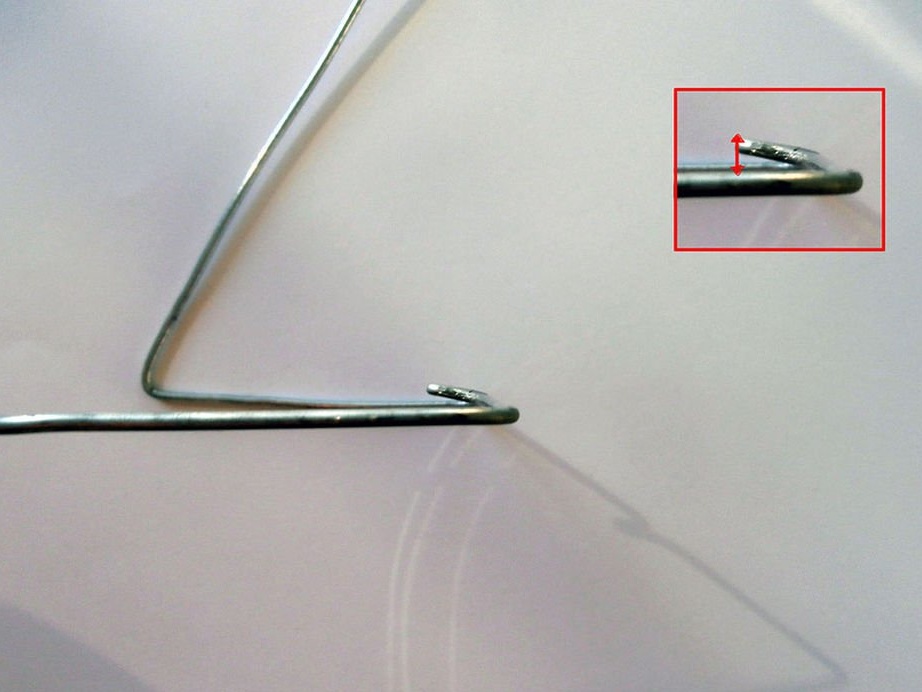
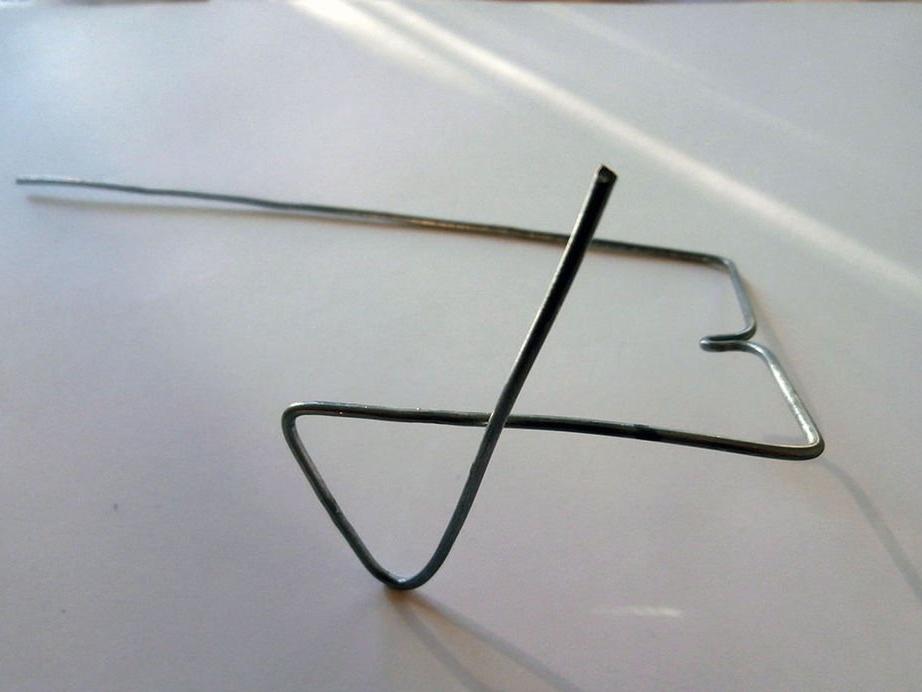
ขั้นตอนที่ 6: ขาหน้า
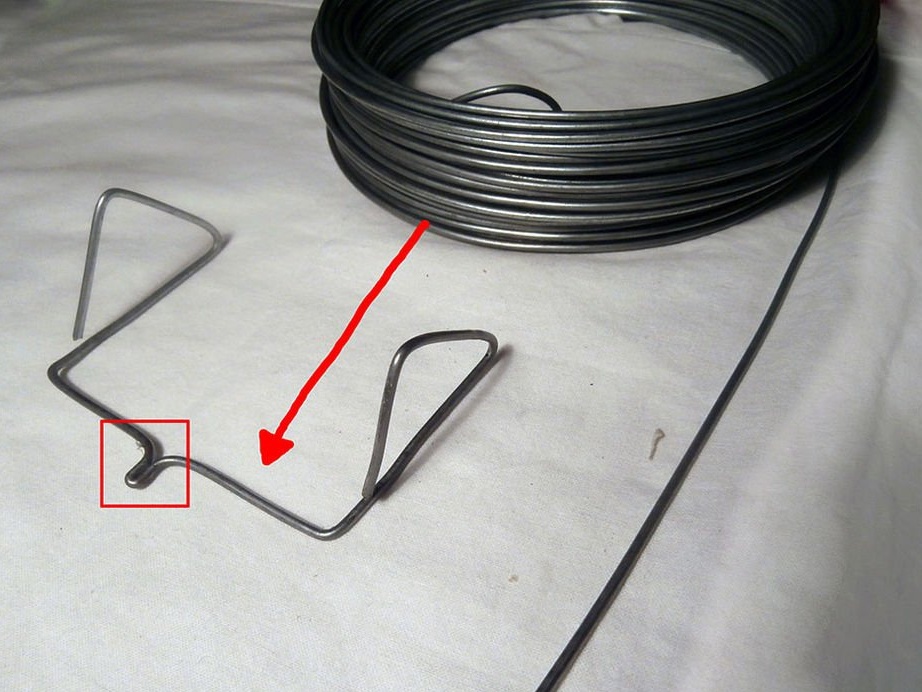
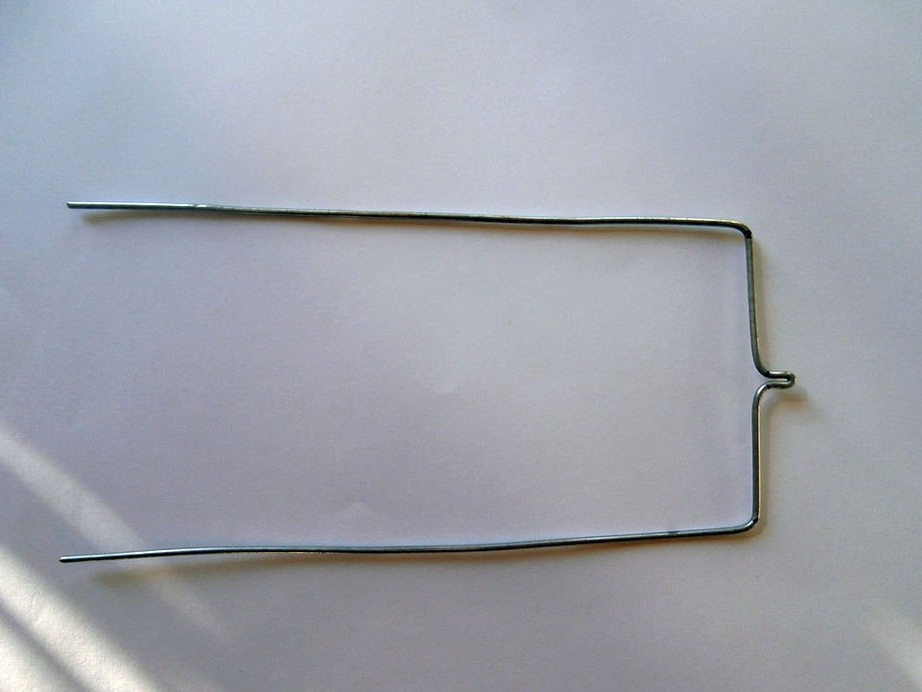
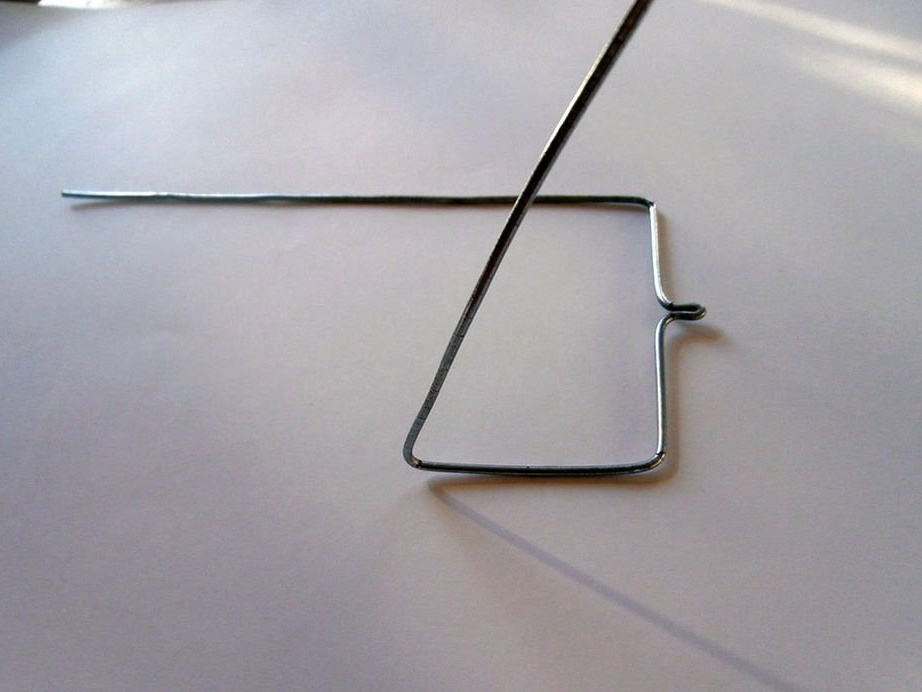
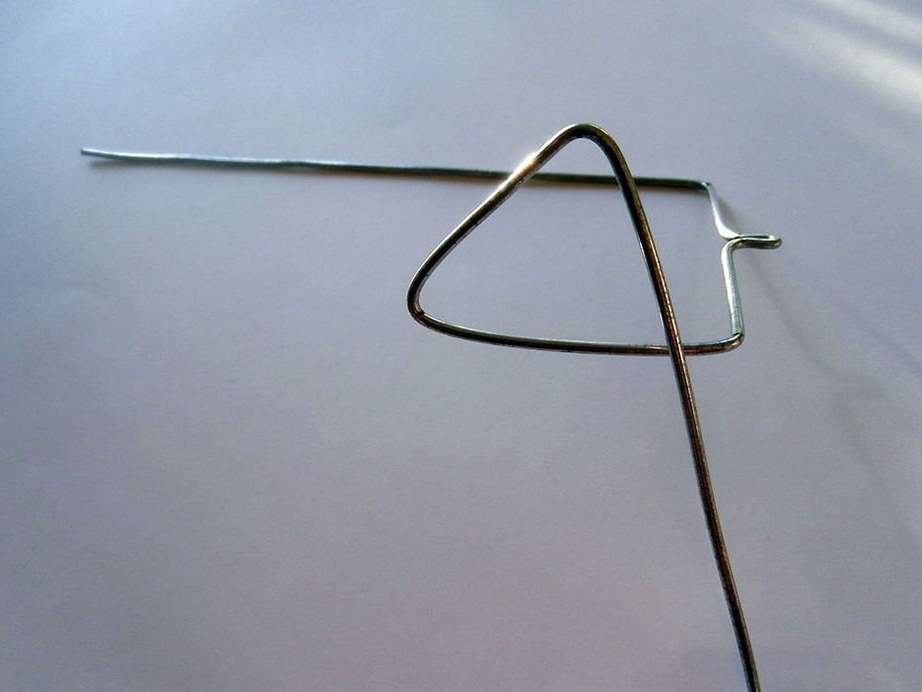
ขั้นตอนที่ 7: ขาหลัง
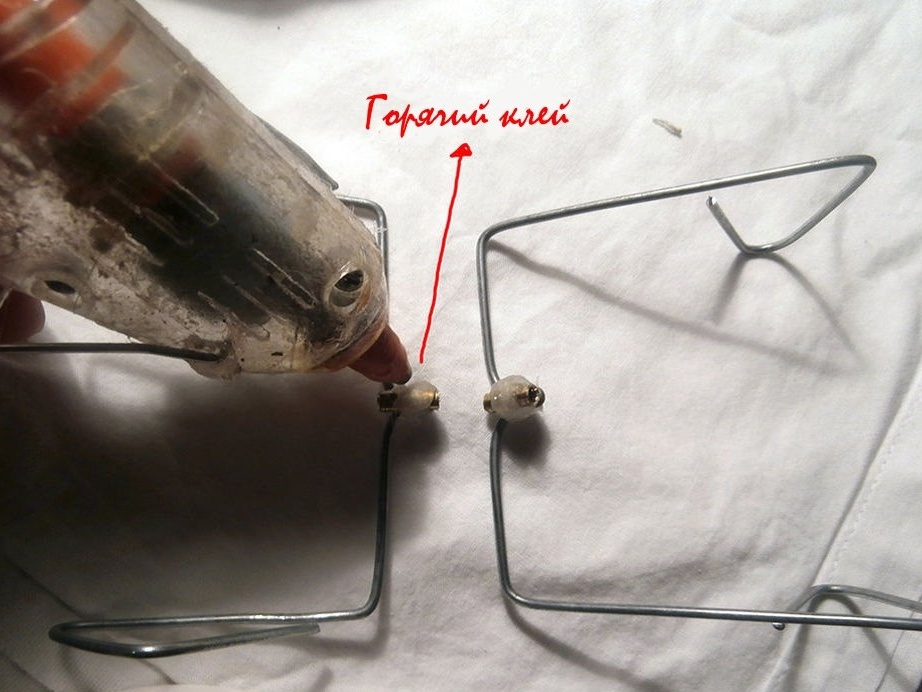
ขั้นตอนที่ 8: การแนบเท้า
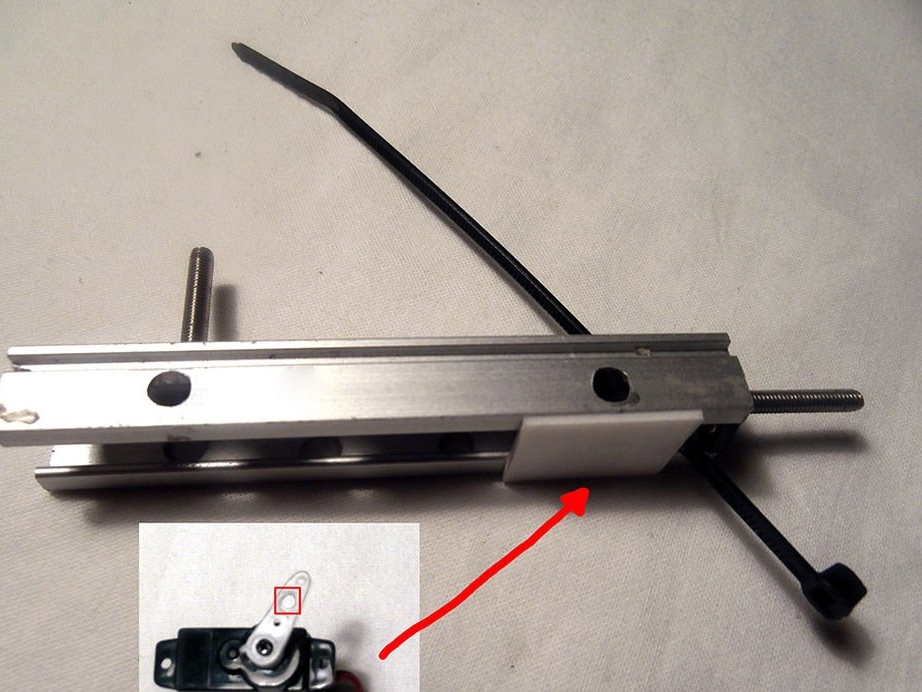
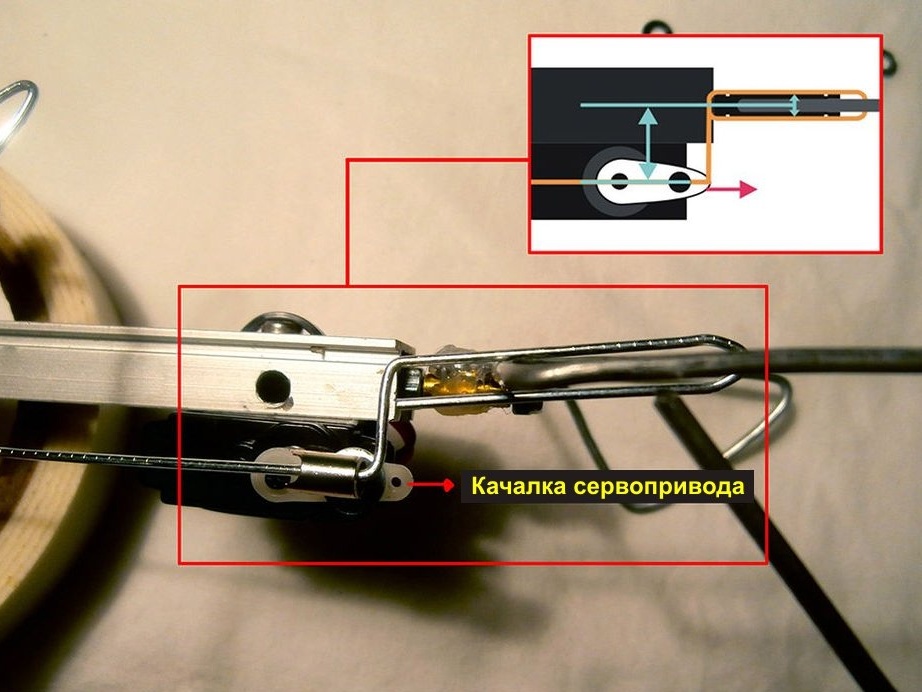
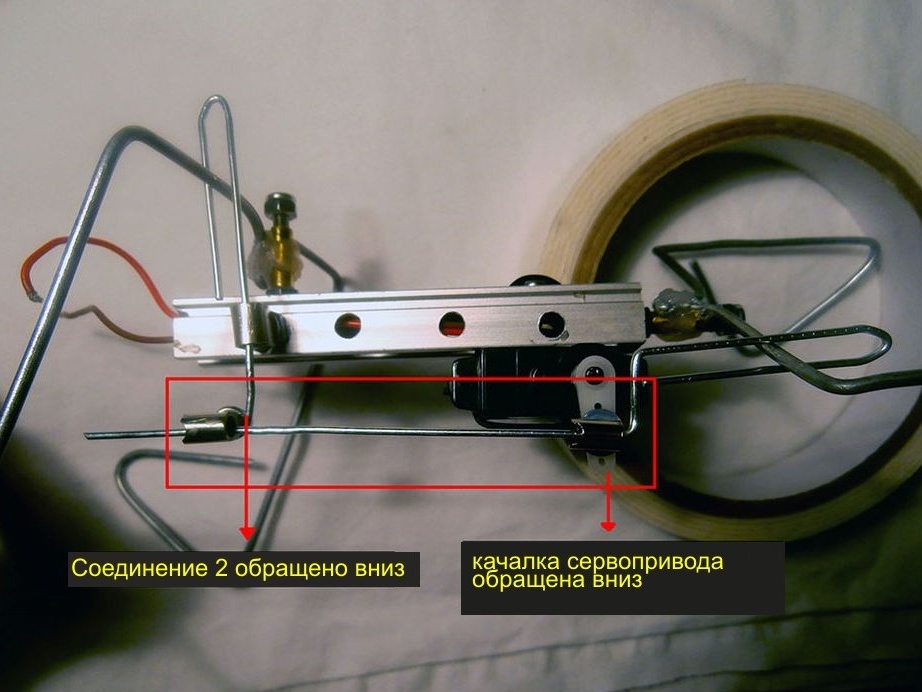
ขั้นตอนที่ 9: คลัตช์
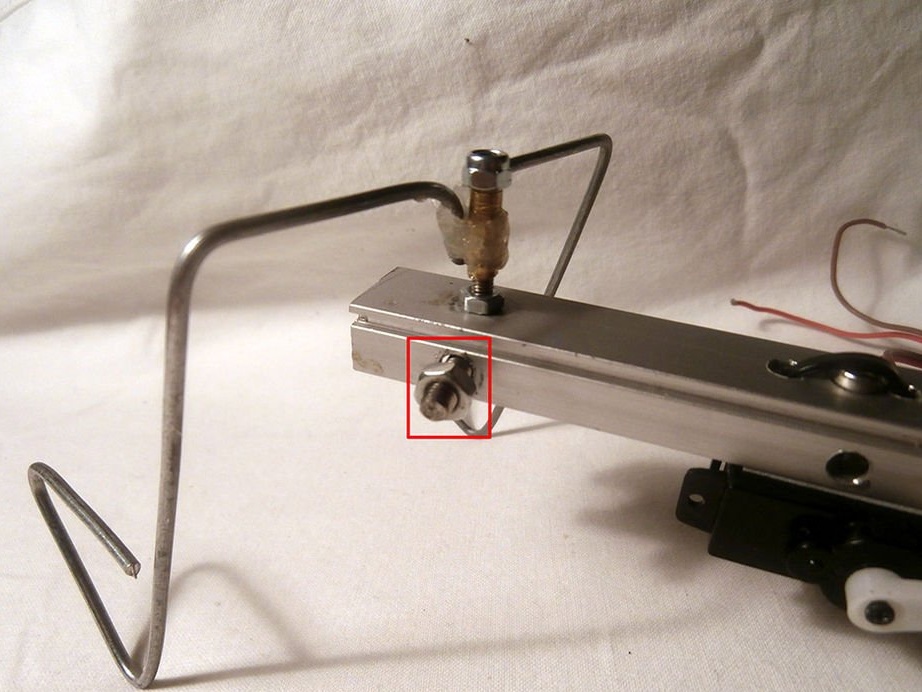
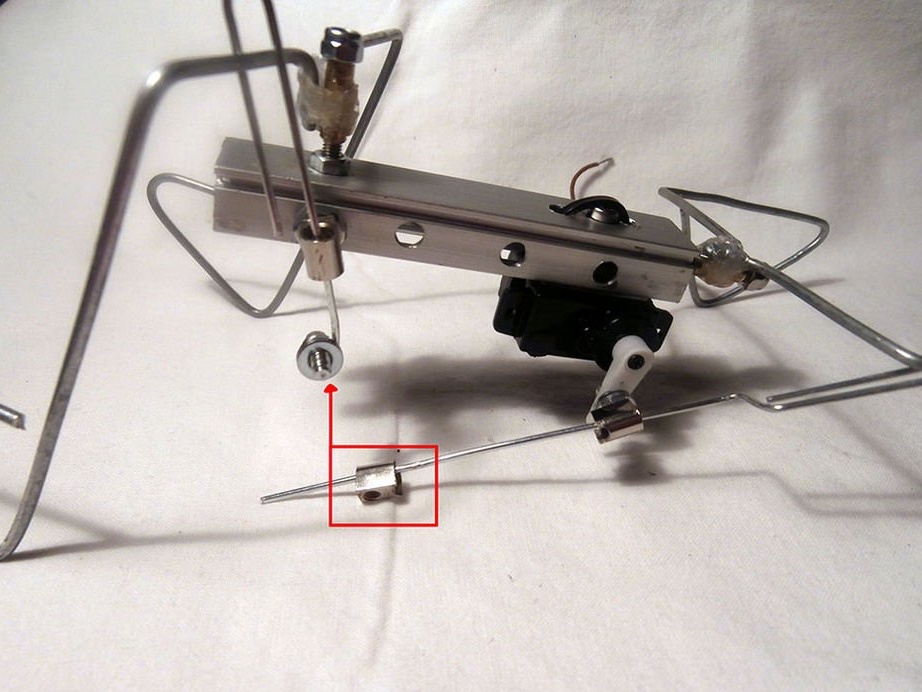
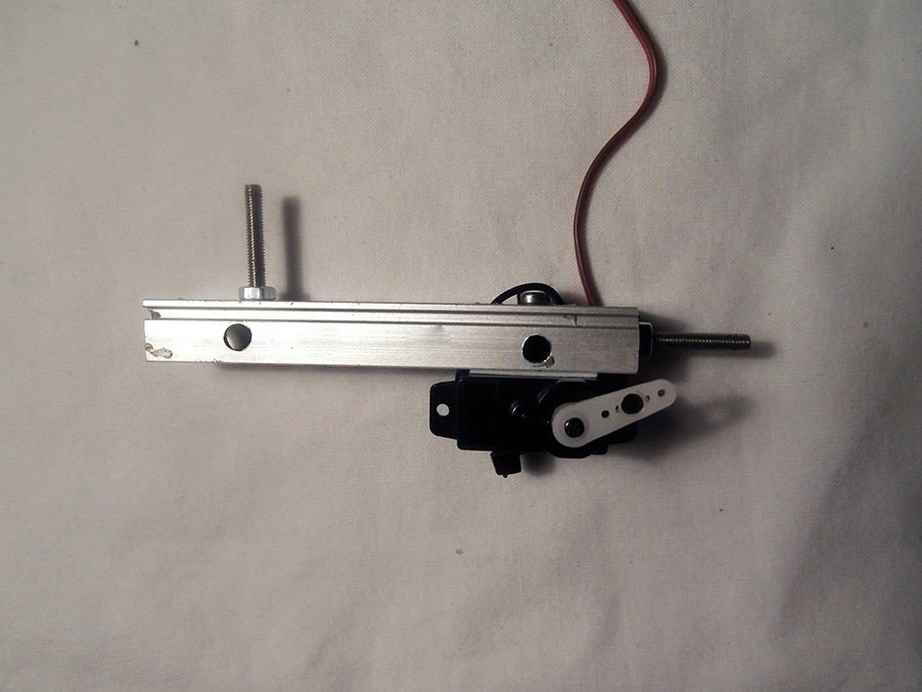
ขั้นตอนที่ 10: คลัชเมา
ขั้นตอนที่ 11: สัมผัสสุดท้าย
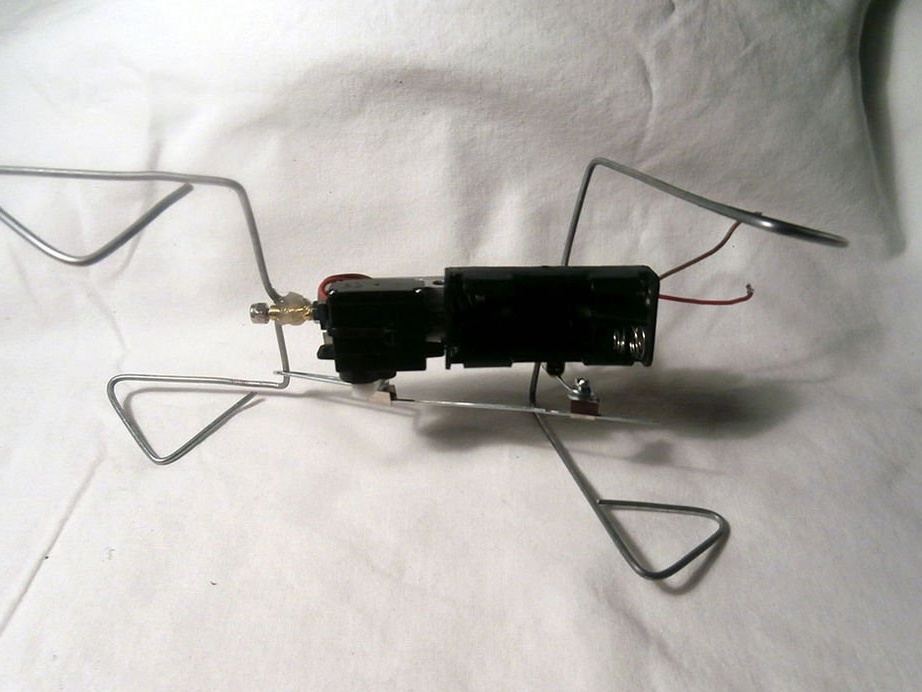
ในท้ายที่สุดเพียงแค่เดินสายเซอร์โวและแบตเตอรี่และ หุ่นยนต์ Owl จะเริ่มเดินทางรอบ ๆ บ้านของคุณ :)