

หากคุณกำลังสร้าง Quadrocopter เครื่องแรกและคุณไม่มีเครื่องพิมพ์ 3D คำแนะนำนี้เหมาะสำหรับคุณ ระหว่างทางในการสร้างควอดคอปเตอร์ตัวนี้อาจารย์ทำแบบจำลองเจ็ดแบบและแต่ละแบบก็มีข้อบกพร่องที่สำคัญ ในที่สุดเขาสามารถผ่านการลองผิดลองถูกเพื่อให้ทำงานได้ รูปแบบ.
เครื่องมือและวัสดุ:
- ไม้อัดที่มีความหนา 7 มม. และขนาดประมาณ 30 x 22 ซม.
- ท่ออลูมิเนียมโปรไฟล์ 25 * 25 มม. - 1 เมตร
-Izolenta;
-Krepezh;
- ล็อคด้าย;
- อุปกรณ์เสริมสำหรับทิ้ง;



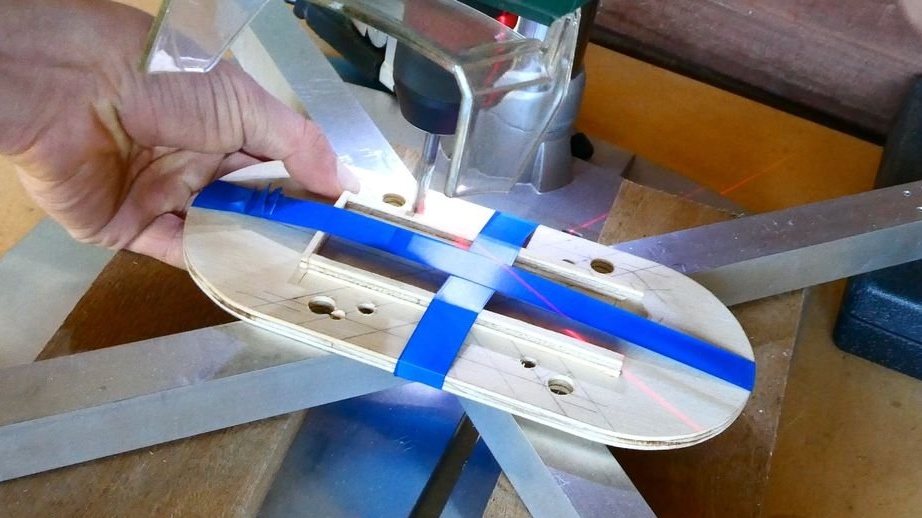
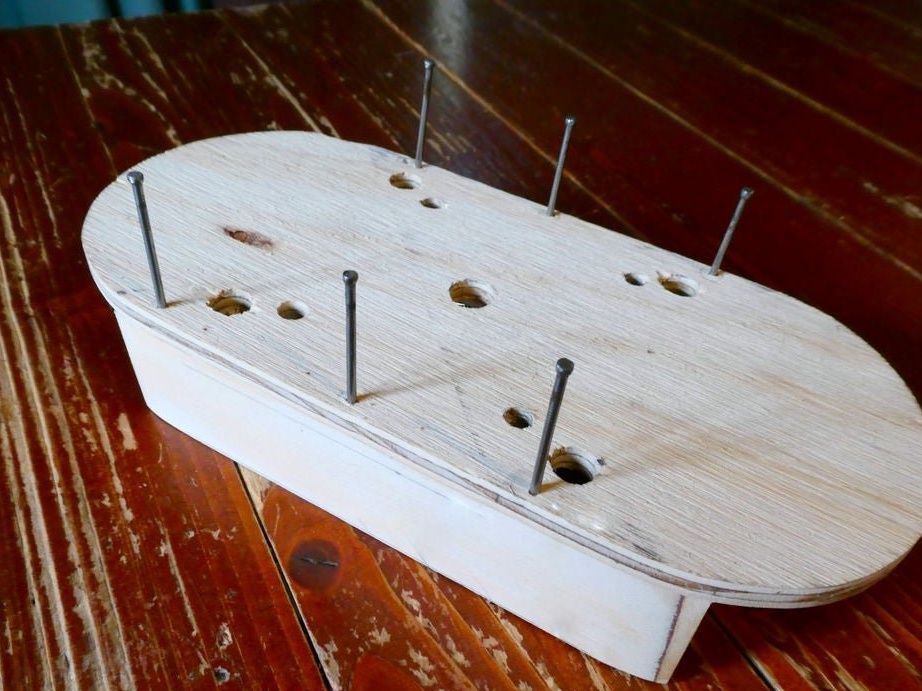
ขั้นตอนที่หนึ่ง: คดี
ชนิด แบบ และติดมันบนไม้อัด ตัดชิ้นส่วนและเจาะรูทั้งหมด
วางแบตเตอรี่บนฐานและรักษาสมดุลของฐาน จัดเค้าร่างแบตเตอรี่ กาวแถบบนสามด้านของแบตเตอรี่





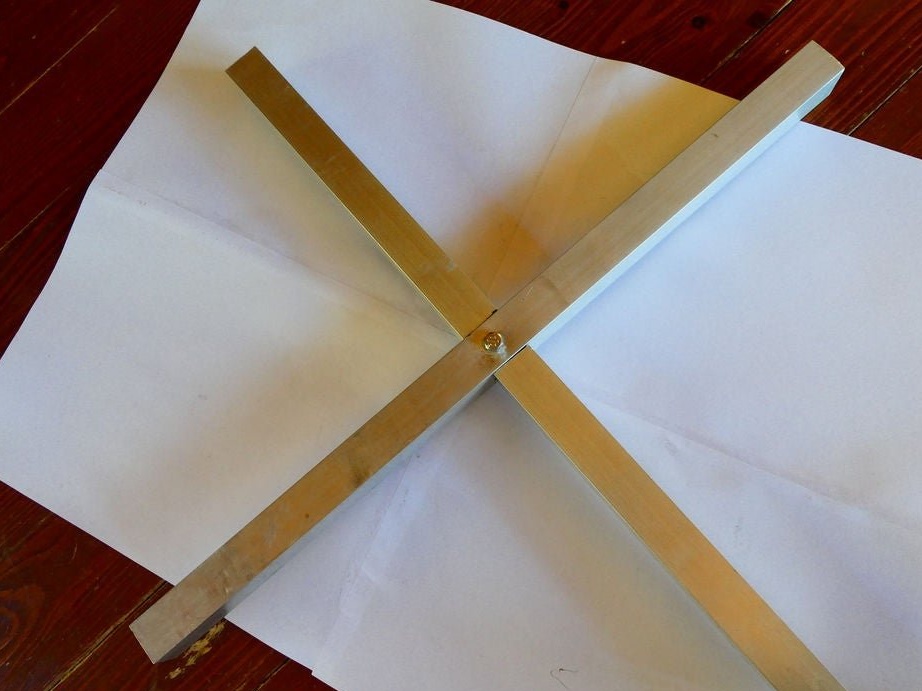
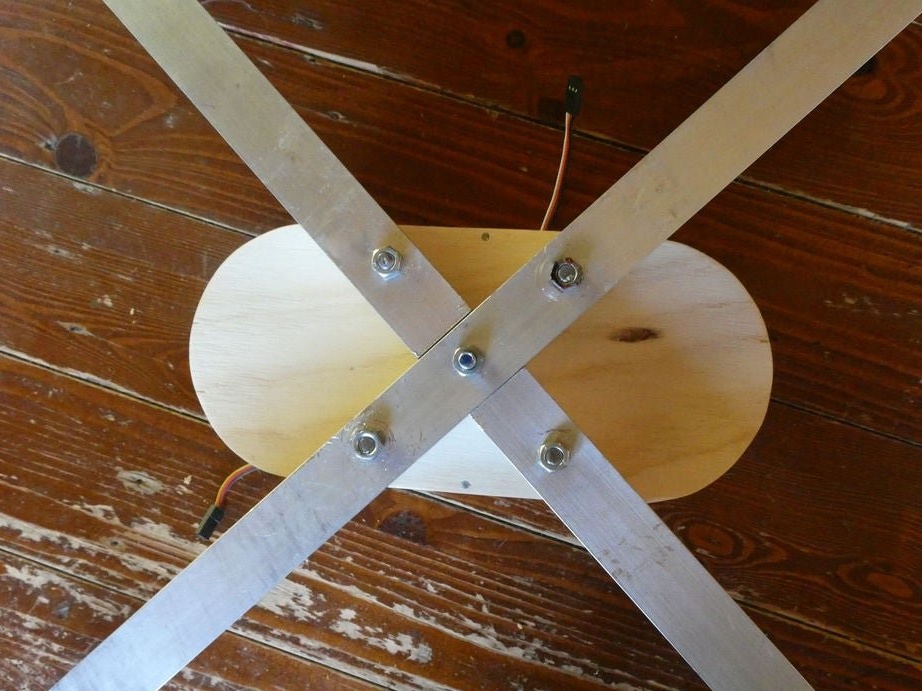
ขั้นตอนที่สอง: กรอบ
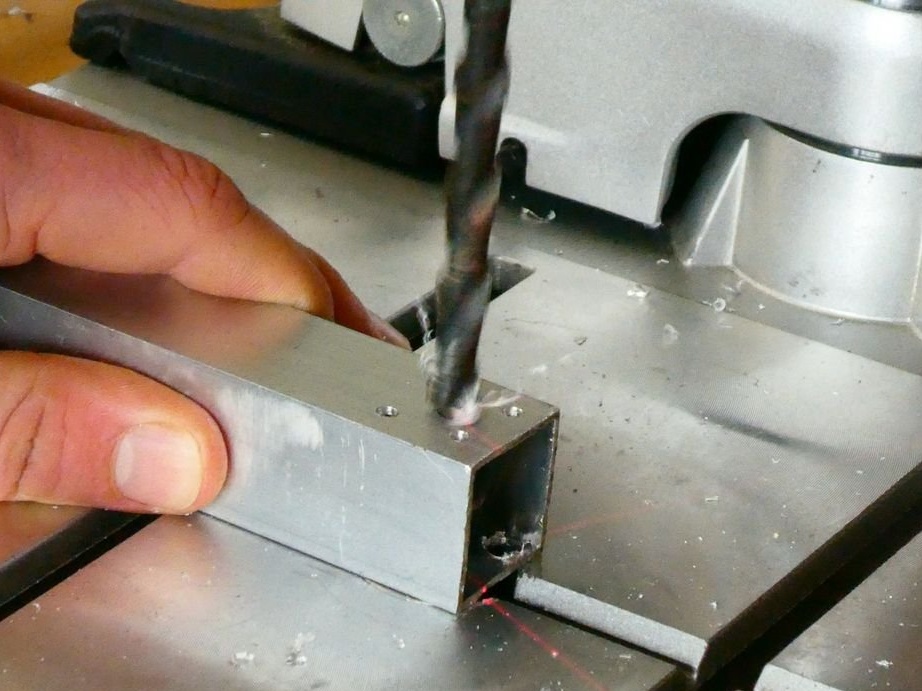
ตัดท่อโปรไฟล์อลูมิเนียมออกเป็นสองส่วนเท่า ๆ กัน (50 ซม. ละ) ตัดร่องสองอันที่ 2.5 ซม. ที่กึ่งกลางของท่อเจาะที่กึ่งกลางของรู ประกอบไม้กางเขนและยึดด้วยกลอน

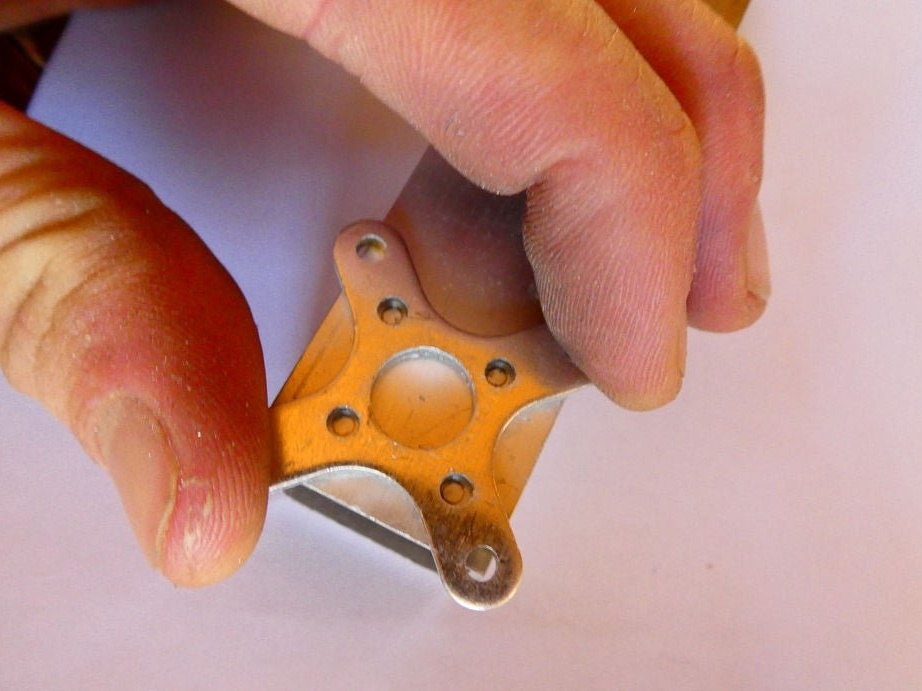
ตอนนี้ใช้เมาท์มอเตอร์ที่มาพร้อมกับพวกเขาเพื่อทำเครื่องหมายรูติดตั้ง เจาะรู หนามจะต้องถูกขัด

ทำเครื่องหมายและเจาะรูสำหรับติดตั้งเพื่อติดตั้งแชสซีเข้ากับเฟรม
กาวแถบด้านข้างกับร่างกาย

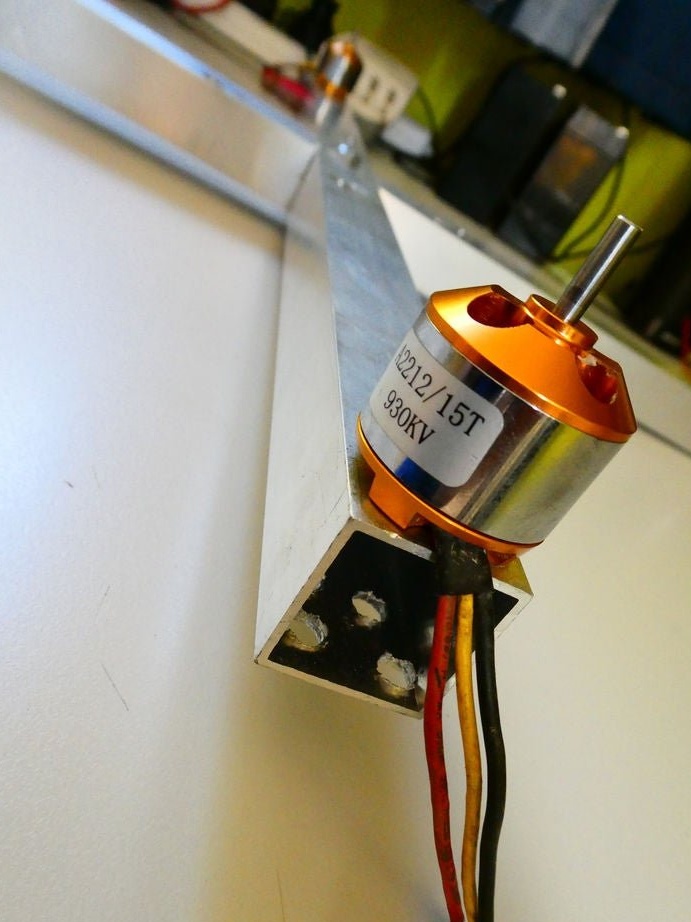
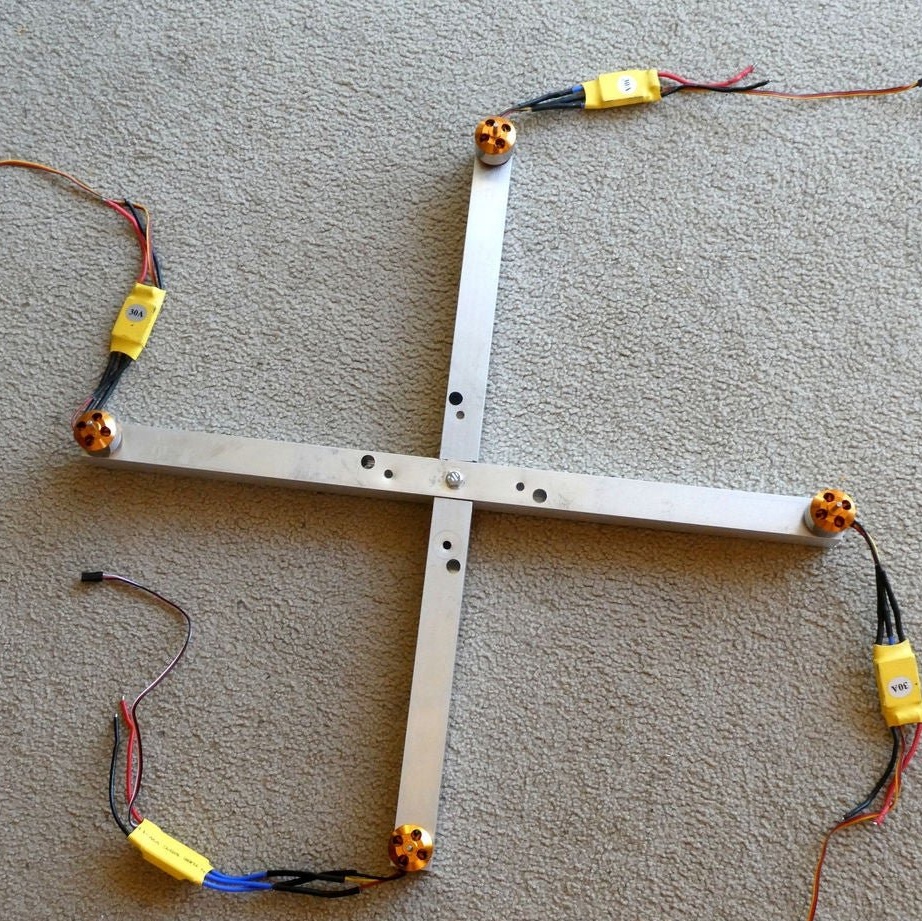
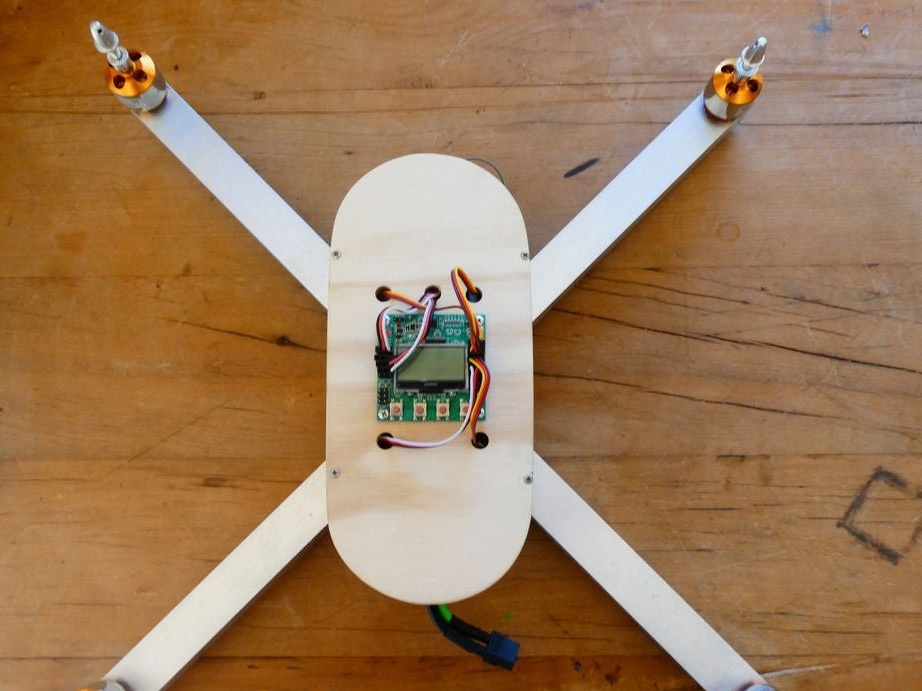
ขั้นตอนที่สาม: การติดตั้ง
ตอนนี้คุณต้องซ่อมมอเตอร์บนเฟรม จำเป็นอย่างยิ่งที่จะต้องใช้การล็อคเกลียวกับสกรูยึดมิฉะนั้นสกรูจะถูกคลายเกลียวและมอเตอร์จะลอยไป
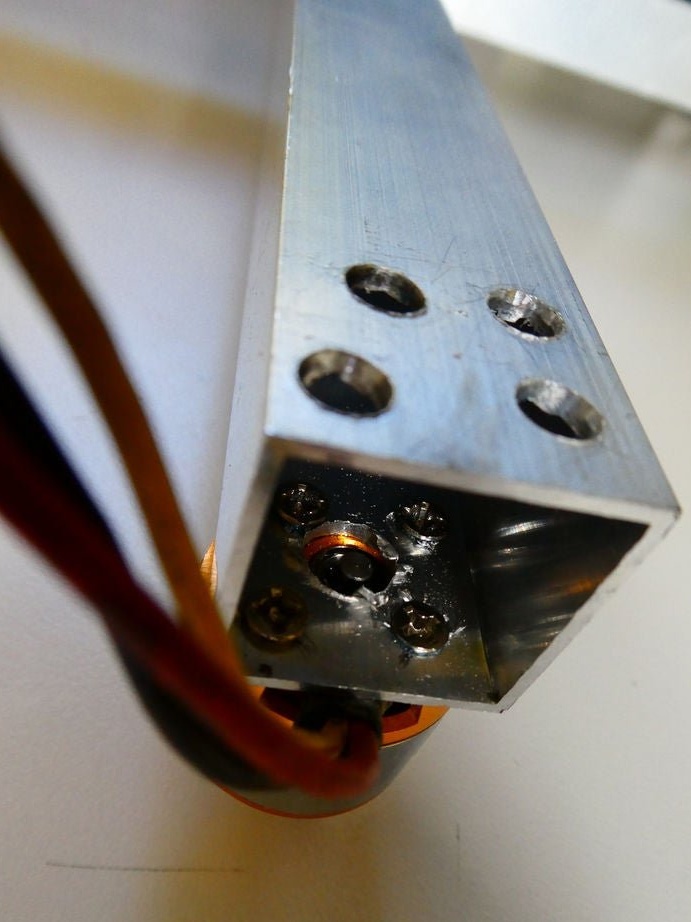
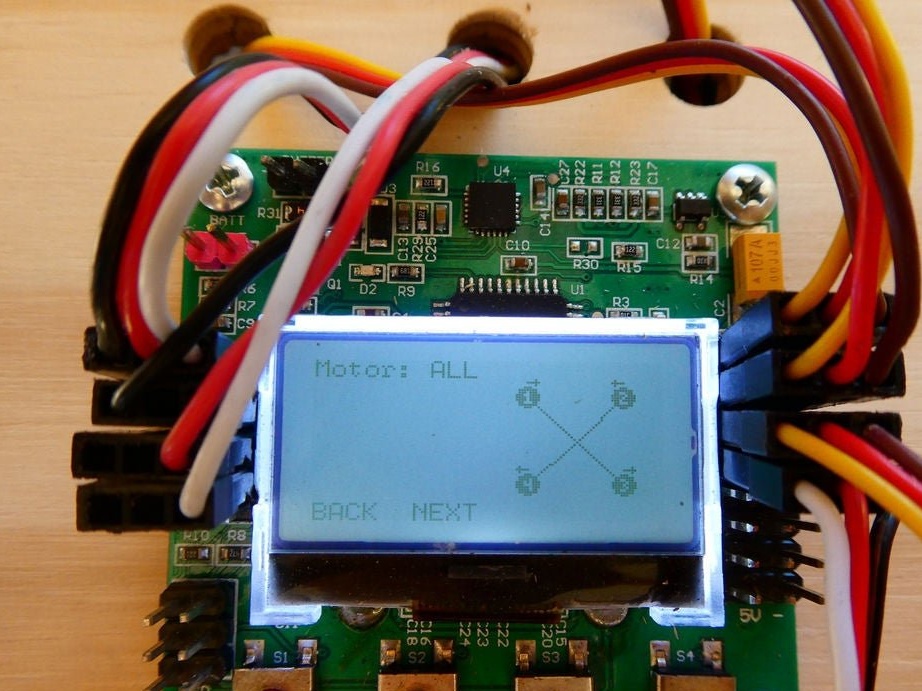
เชื่อมต่อ ESC กับมอเตอร์เพื่อให้มอเตอร์ซ้ายบนหมุนตามเข็มนาฬิกามอเตอร์บนขวาหมุนทวนเข็มนาฬิกามอเตอร์ล่างขวาหมุนตามเข็มนาฬิกาและมอเตอร์ซ้ายล่างหมุนทวนเข็มนาฬิกา ในการเปลี่ยนทิศทางการหมุนของมอเตอร์ให้สลับสายสองสามสาย ป้องกันการเชื่อมต่อ
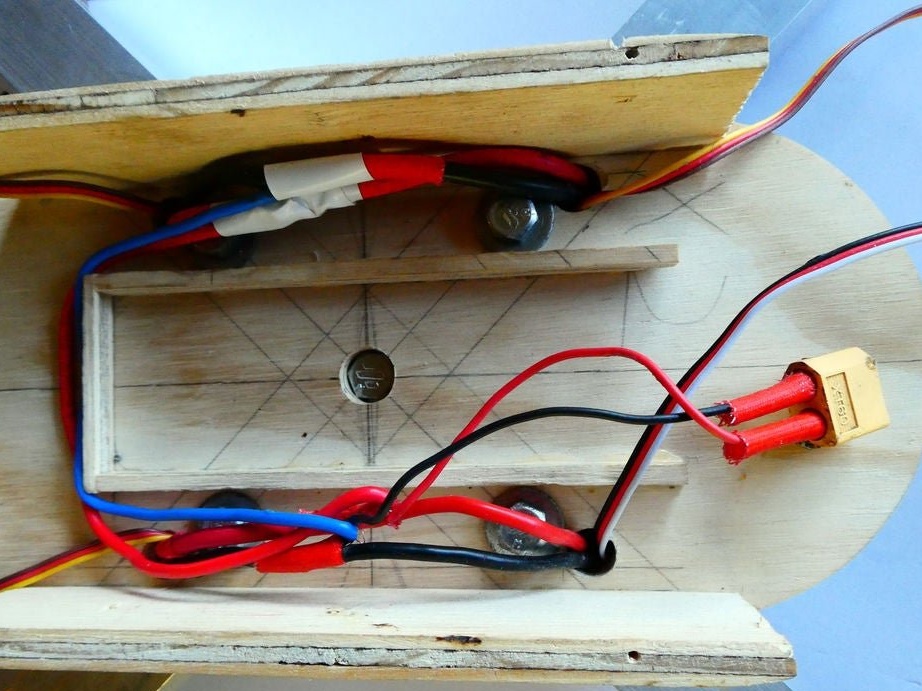
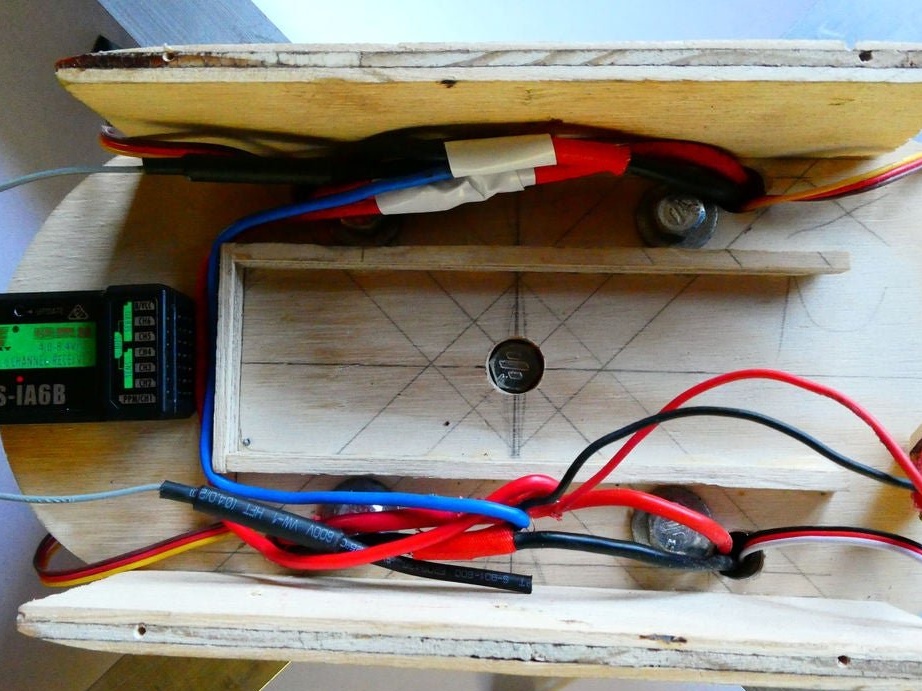
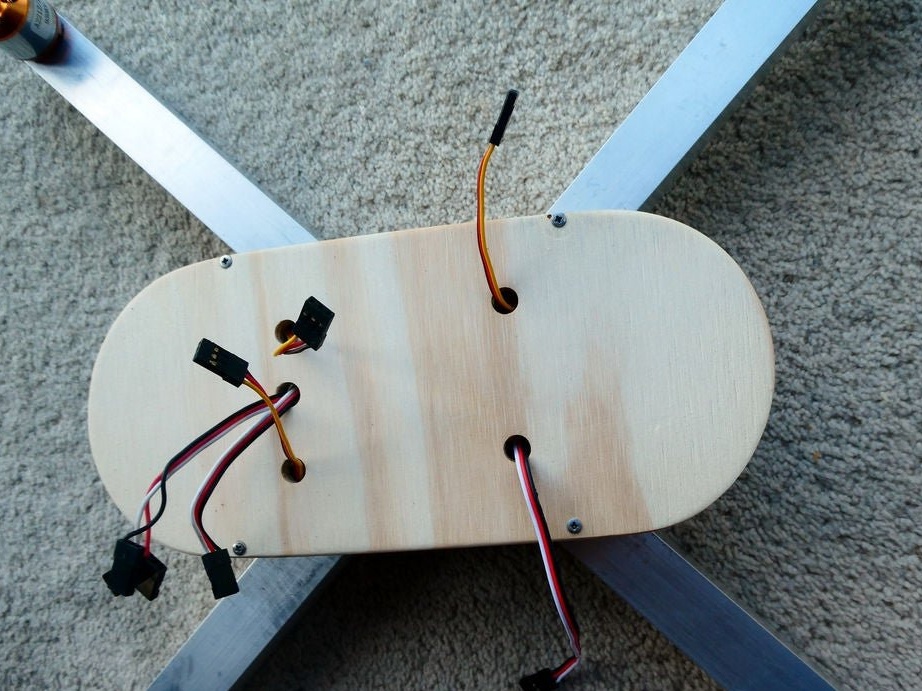
ดึงสายไฟผ่านโครงและดึงเข้าไปในรู ESC ได้รับการแก้ไขภายในหลอดของเฟรม

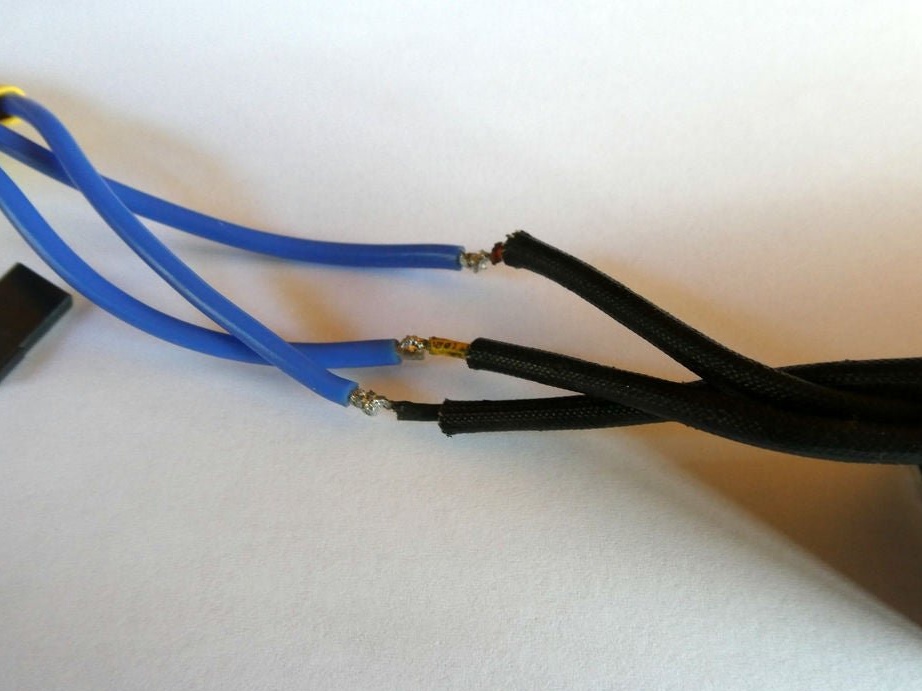
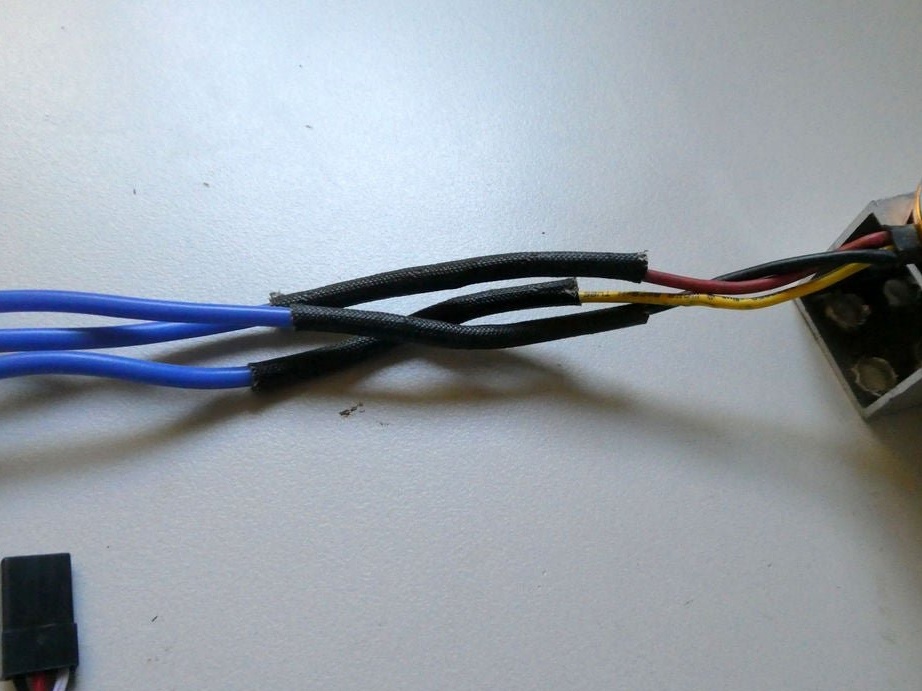
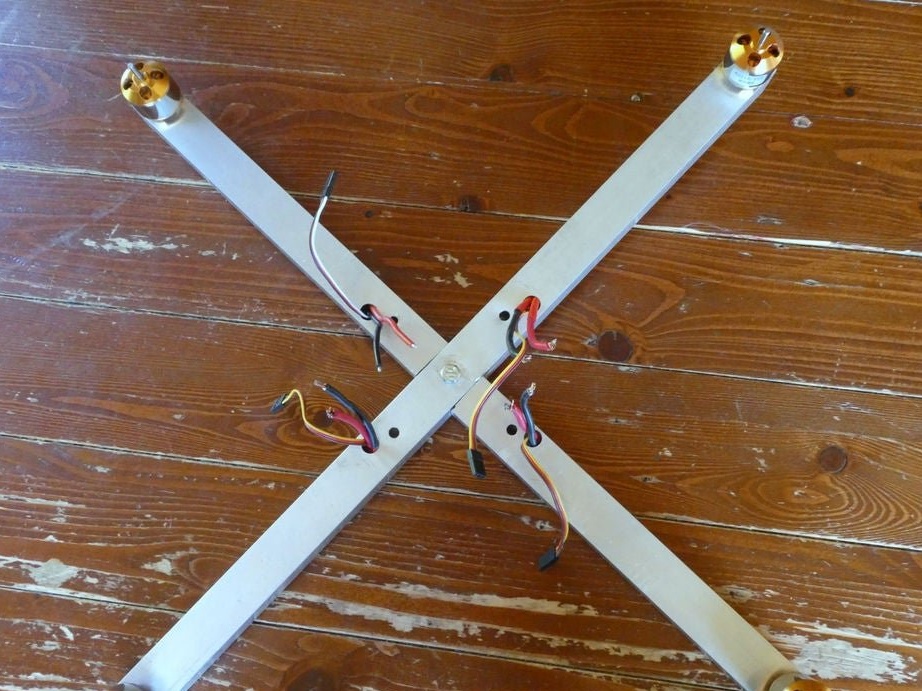
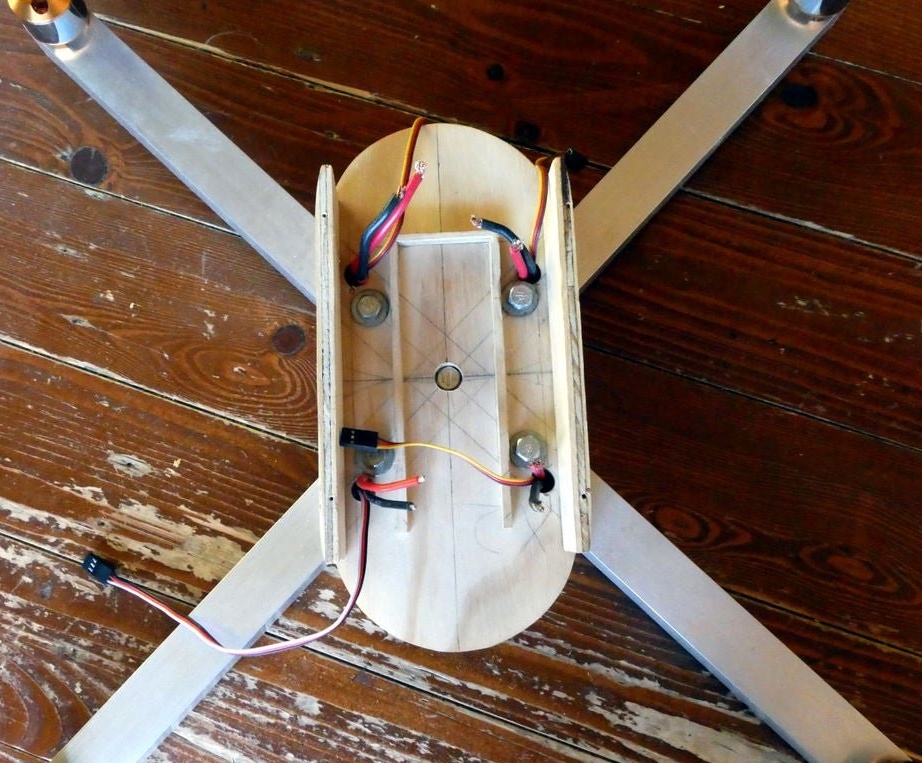
เชื่อมต่อสายสีดำทั้งหมด (ลบ) และสายสีแดงทั้งหมด (บวก) เข้าด้วยกัน บัดกรีสองสายเข้ากับขั้วต่อ XT60 (สีแดงและสีดำ) ยึดตัวรับสัญญาณเข้ากับตัวเครื่องโดยใช้เทปสองด้าน
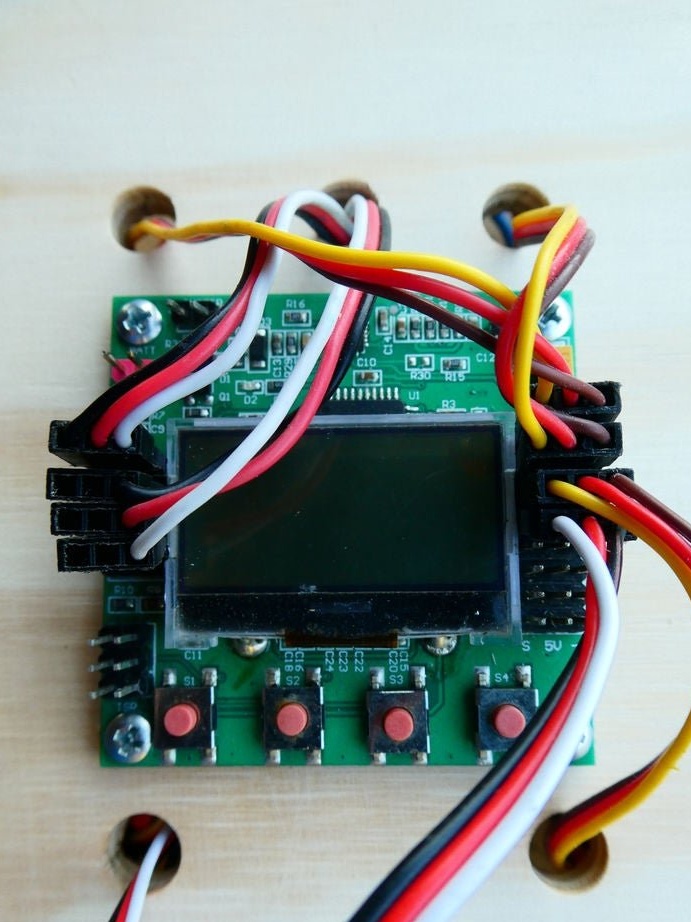
ดึงสายไฟจากตัวควบคุมและตัวรับสัญญาณผ่านรูในฝาปิดช่องว่างจากนั้นหมุนฝาครอบ ขันสกรูของตัวควบคุมเข้ากับฝาปิด เชื่อมต่อสายไฟเข้ากับบอร์ดควบคุมการบิน
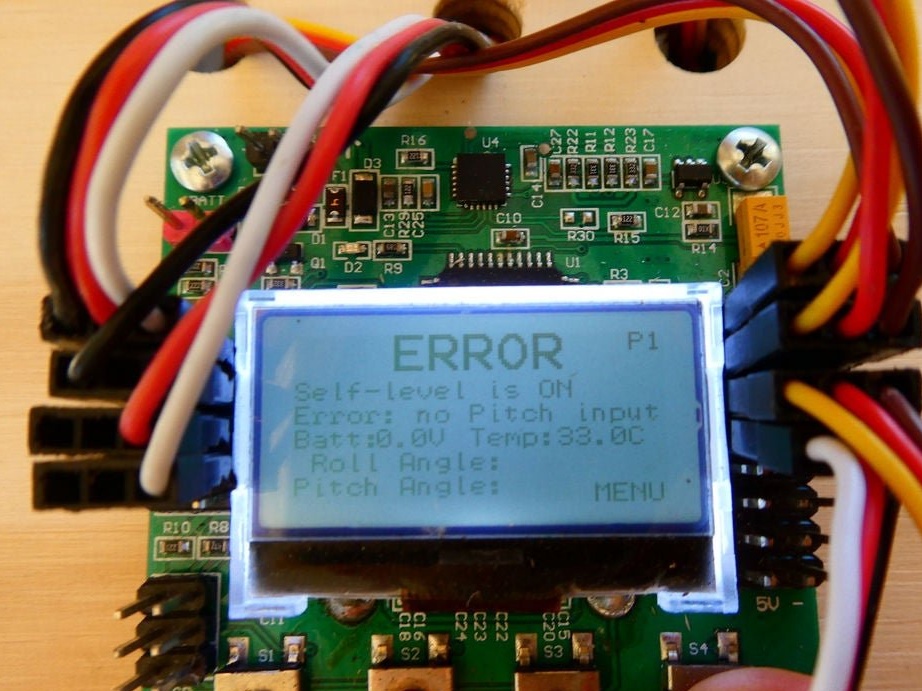
ขั้นตอนที่สี่: ตั้งค่า
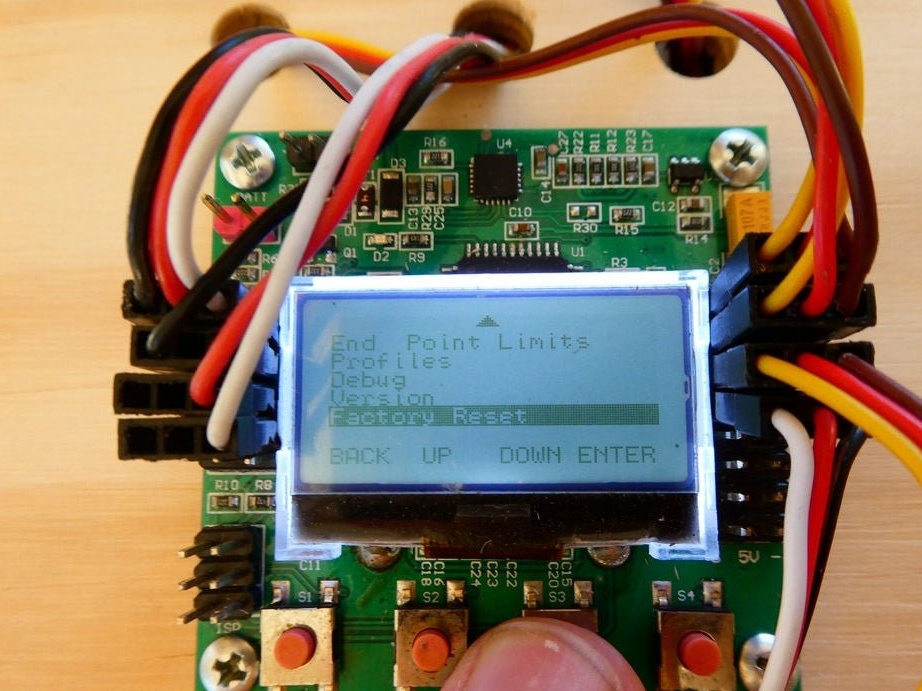
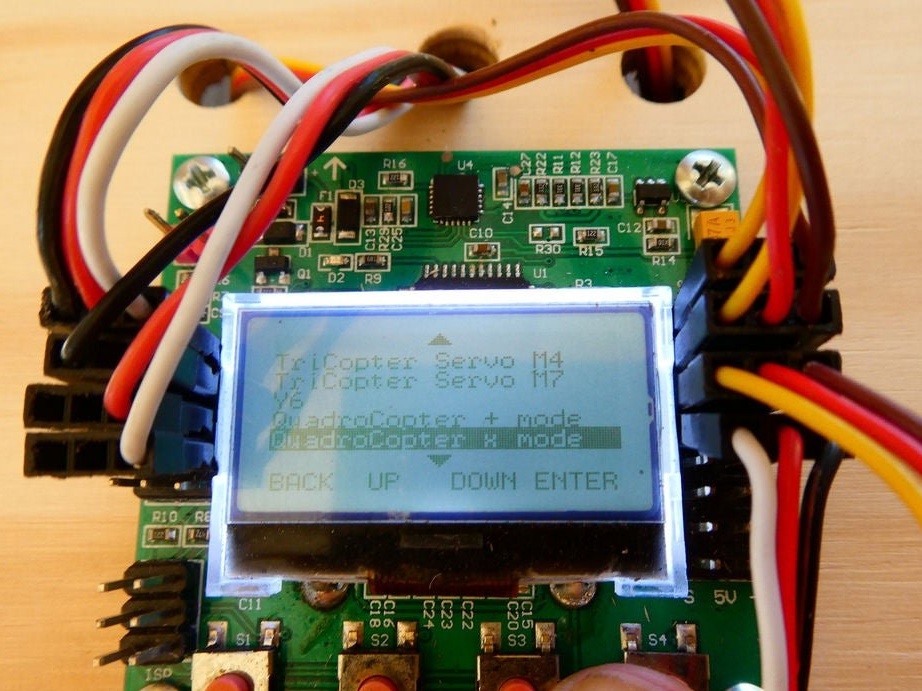
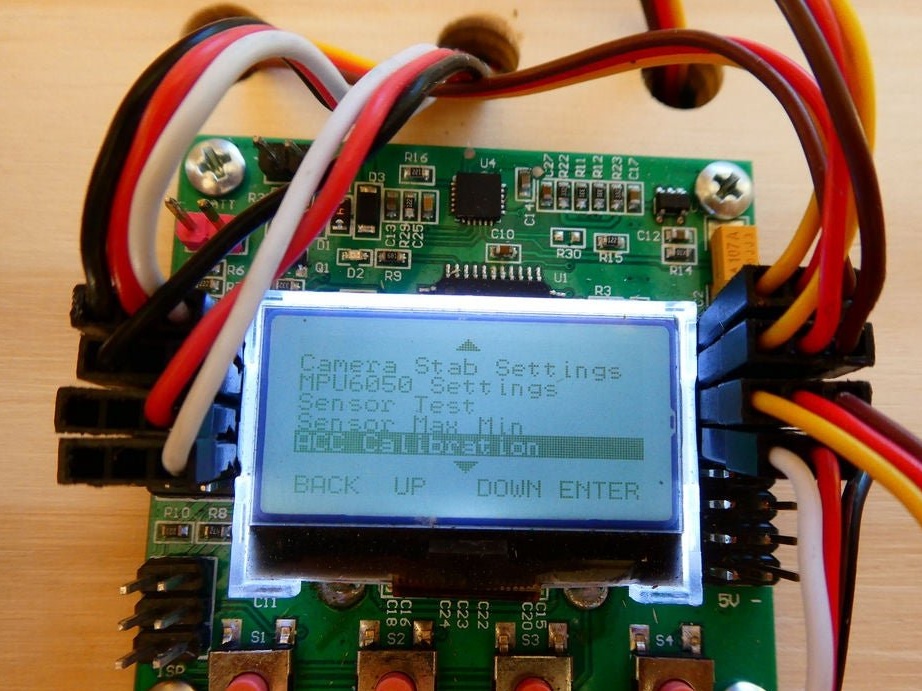
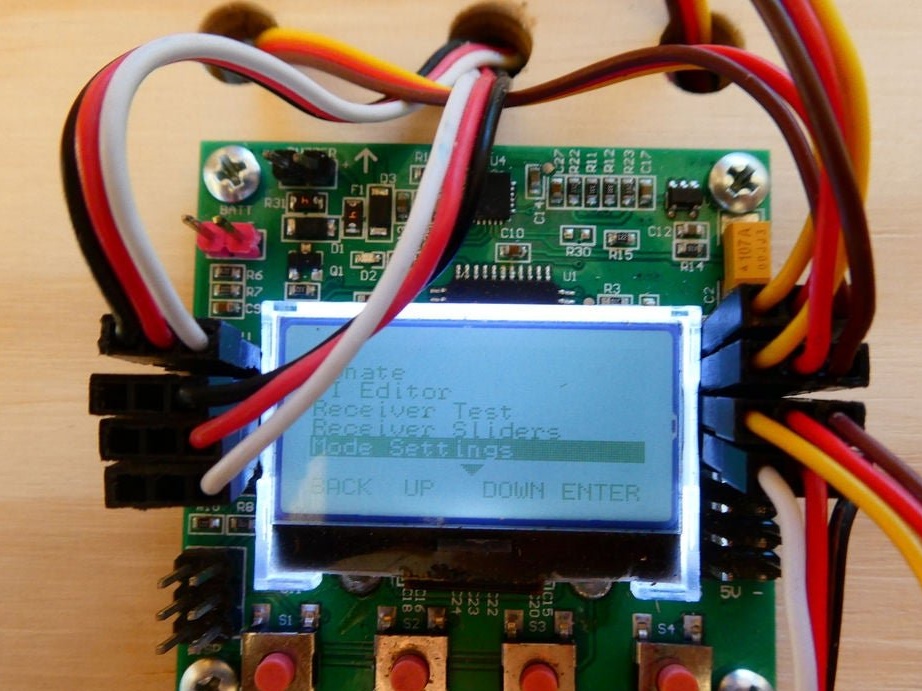
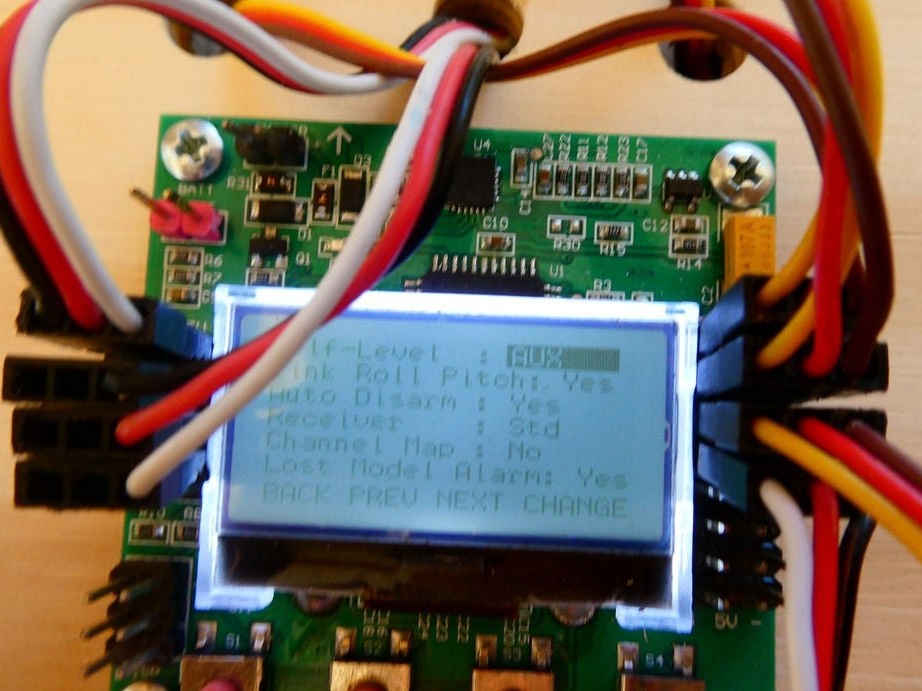
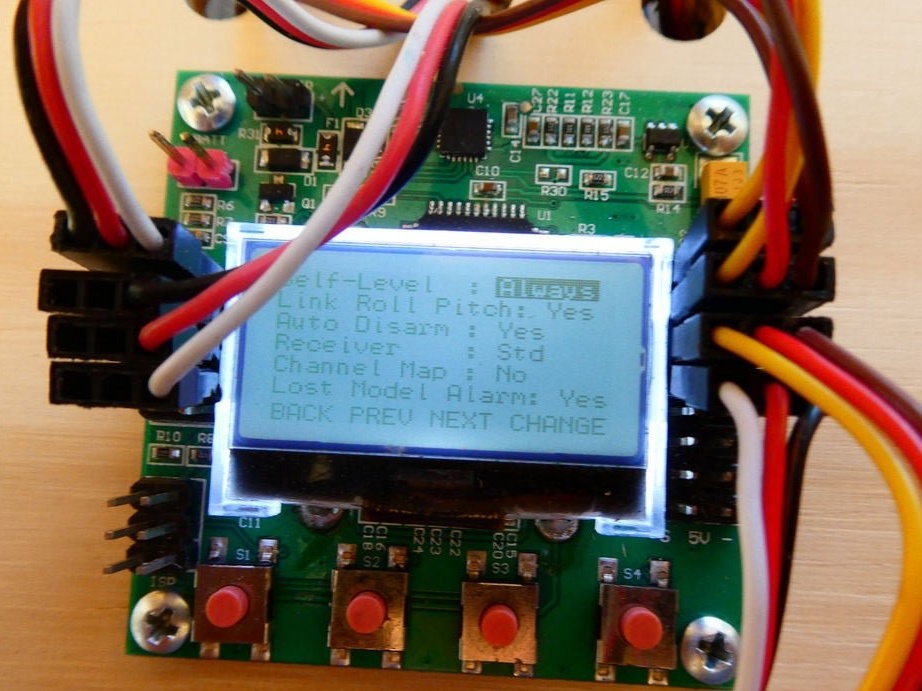
เชื่อมต่อแบตเตอรี่และคอนโทรลเลอร์ควรบู๊ต ข้อความแสดงข้อผิดพลาดควรปรากฏขึ้นบนหน้าจอ ละเว้นมันและกดปุ่มเมนู เลื่อนลงและคลิก "รีเซ็ต" จากนั้นเมนูจะปรากฏขึ้นเพื่อเลือกเฟรมที่ต้องการของโดรน เลื่อนลงไปจนมาถึงโหมด Quadcopter-X แล้วกด“ ยอมรับ” กดย้อนกลับและเลือก“ การปรับเทียบ AUX” วางเสียงพึมพำบนพื้นผิวเรียบแล้วกด“ ปรับเทียบ” เมื่อทำสิ่งนี้เสร็จให้เลื่อนขึ้นไปที่การตั้งค่าโหมดและเปลี่ยนระดับอัตโนมัติจาก "AUX" เป็น "เสมอ"
ปิดแบตเตอรี่เปิดคอนโทรลเลอร์แล้วเชื่อมต่อแบตเตอรี่อีกครั้ง ผู้ควบคุมการบินควรเปิดและแสดง SAFE เลื่อนจากซ้ายไปมุมซ้ายและจอแสดงผลควรเปลี่ยนจาก SAFE เป็น ARMED
ขั้นตอนที่ห้า: ใบพัด
ขันสกรูเข้ากับเพลาของมอเตอร์


ทุกอย่างพร้อมแล้ว และสุดท้ายเคล็ดลับจากอาจารย์
ตอนแรกควอดคอปเตอร์อาจดูควบคุมยาก วิธีที่ดีที่สุดในการเริ่มบินคือการปีนขึ้นไปเหนือพื้นดินประมาณ 1 เมตรแล้วบินกลับไปกลับมาซ้ายและขวาจากนั้นเริ่มการบินด้วย quadcopter เป็นวงกลม Quadcopter ไม่ชอบเที่ยวบินที่ "กำจัดสิ่งสกปรก" ดังนั้นเรียนรู้การใช้งานได้อย่างราบรื่น
เริ่มต้นบินให้หันหน้าไปทางด้านหลังของโดรนเพื่อให้คุณรู้อยู่เสมอ
สกรูคาร์บอนไฟเบอร์มีความแข็งแรงกว่าสกรูพลาสติกและไม่แตกเช่นนั้น


