


ในบทความนี้พ่อมดจะแสดงให้เราเห็นว่าเขาสร้างเฮลิคอปเตอร์ Lego 60193 Arctic Air Transport ได้อย่างไร รูปแบบ Quadrocopter ภารกิจหลักในการผลิต Quadrocopter นอกเหนือจากคุณสมบัติการบินคือการบันทึกชิ้นส่วนดั้งเดิมให้ได้มากที่สุด
ลองดูวิดีโอสั้น ๆ ที่แสดงการทำงานของควอดคอปเตอร์
ดังนั้นสำหรับการผลิตควอดคอปเตอร์ดังกล่าวนายจึงใช้สิ่งต่อไปนี้
เครื่องมือและวัสดุ:
-LEGO เฮลิคอปเตอร์เมืองอาร์กติก - 60193:
- คอนโทรลเลอร์และ ESC 20x20 มม. ตัวอย่างเช่น HGLRC XJB F428 Micro F4 AIO OSD
- มอเตอร์แบบไร้แปรง - 4 ชิ้น;
-Propellery;
- แบตเตอรี่ 950 mAh;
-Razemy;
seeing-;
โมดูลวิทยุ (เครื่องส่งและรับ);
-Krepezh;
-Nozh;
- เหล็กหล่อ
- ปืนสีฟ้า;
- ไขควง
-Drel;
ขั้นตอนที่หนึ่ง: สร้างเลโก้
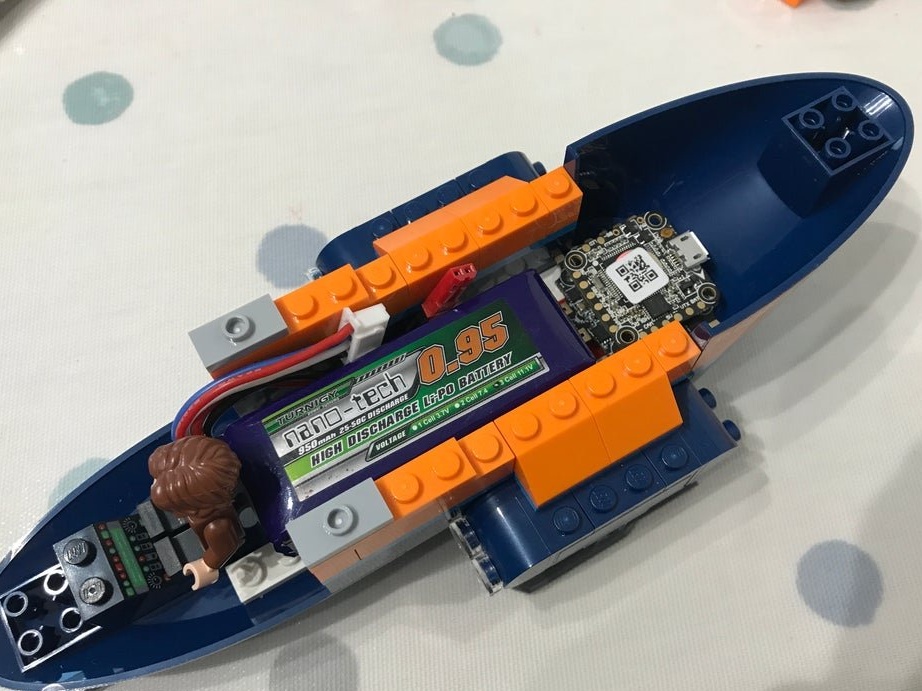
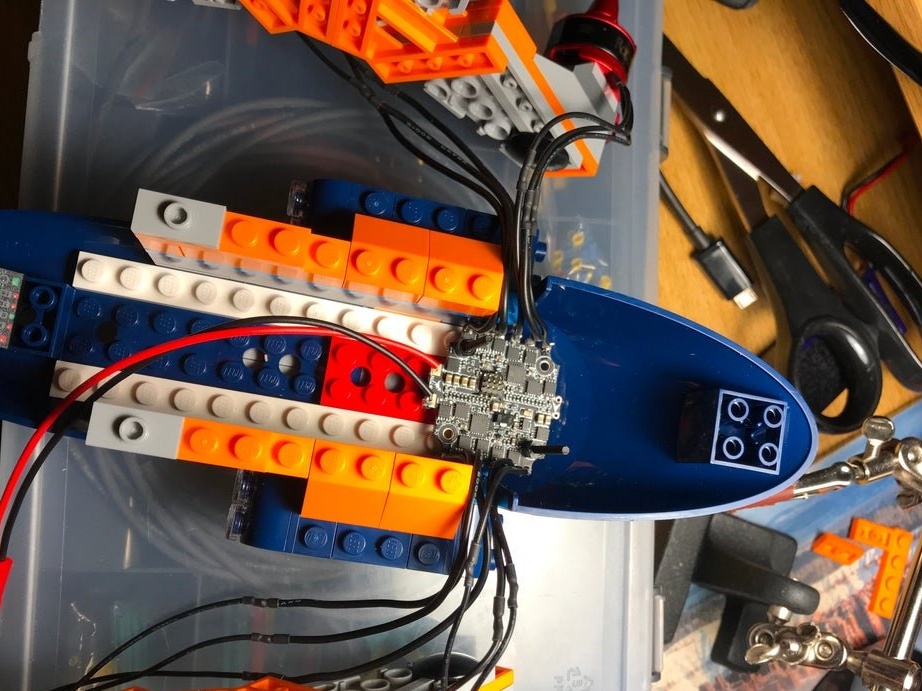
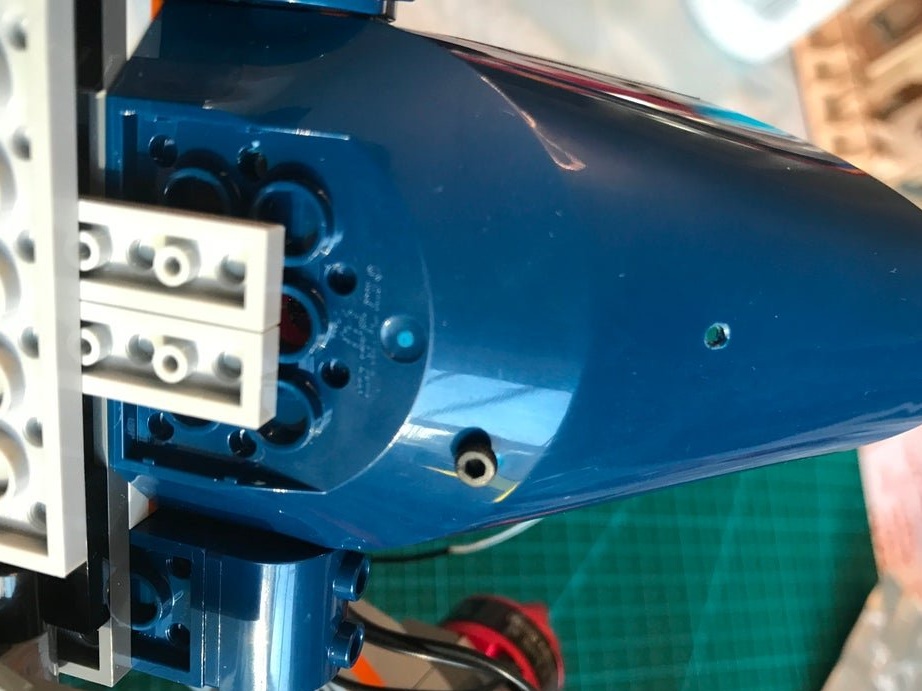
ก่อนอื่นนายเก็บเลโก้ - อาร์กติก จากนั้นแบบจำลองจะถูกถอดประกอบบางส่วน ข้างในคุณจะต้องวางแบตเตอรี่และตัวควบคุมเพื่อดูความสมดุลของรุ่น


ขั้นตอนที่สอง: เมาเครื่องยนต์
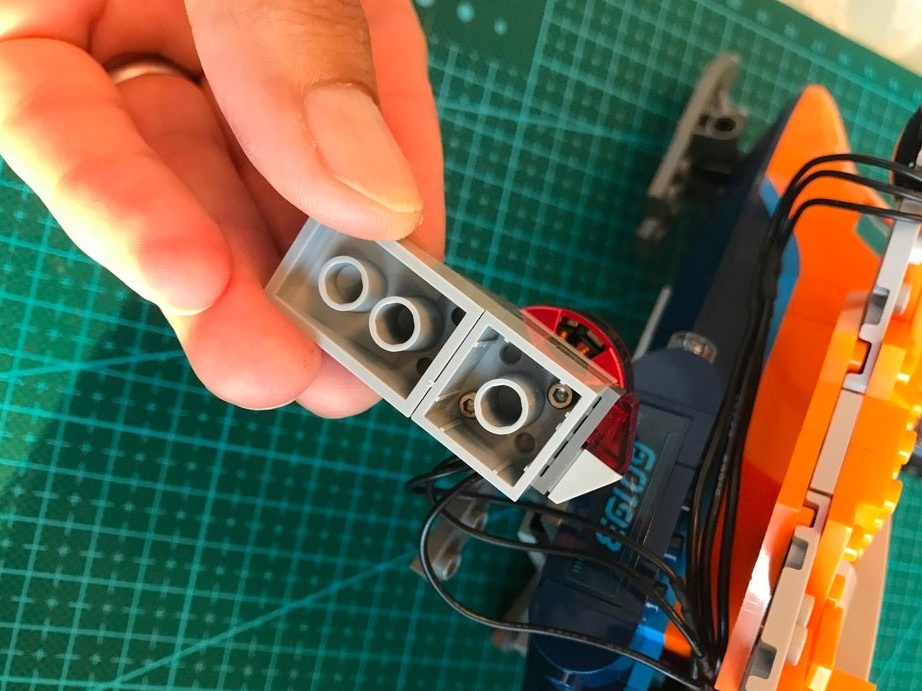
รูยึดสำหรับมอเตอร์แบบไร้แปรงมาตรฐาน 1806 นั้นเหมือนกันมากกับกระดุมบนแผ่น LEGO 2x2 มาตรฐาน “ เอนจิ้น” แต่ละตัวติดตั้งบน Quadrocopter มีแผ่นกระเบื้องสีเทาเข้ม 2x2 (เลโก้ 3022) และกระเบื้องสีเทาอ่อน 2x2 พร้อมขาตั้งแนวตั้ง (เลโก้ 2460) ซึ่งมักจะอยู่ที่ศูนย์กลางของใบพัดเลโก้ด้านบน
ต้นแบบจะทำการเจาะรูสำหรับติดตั้ง สำหรับมอเตอร์ตรงกลางจะมีน้ำลง รูที่อยู่ใต้นั้นเจาะอยู่ตรงกลางของแผ่นกระเบื้อง ยึดเครื่องยนต์








ขั้นตอนที่สาม: ไหล่
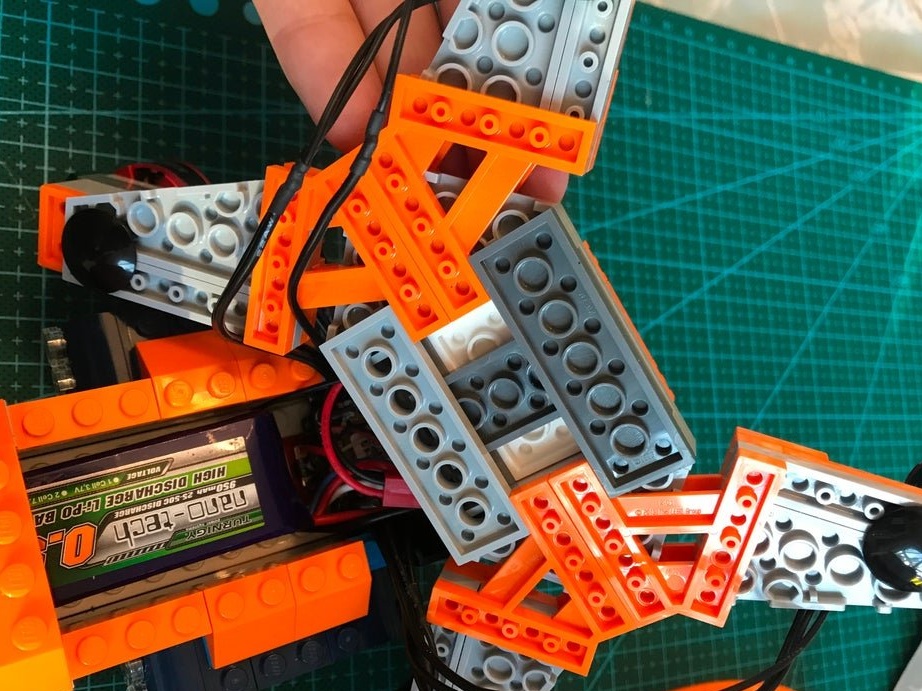
การจัดเรียง "ไหล่" ของ quadrocopter คุณสามารถเปลี่ยนเค้าโครงเล็กน้อยเพื่อจัดเรียงเครื่องยนต์ที่กว้างขึ้นหรือแคบลงและตำแหน่งของสกรูที่สัมพันธ์กัน
ชุดเลโก้มาตรฐาน (ภาพถ่ายแรก) มี "ไหล่" และเครื่องยนต์อยู่ในแนวกว้าง (แนวนอน) ที่มีสกรูค่อนข้างใหญ่ทับซ้อนกัน ต้นแบบ remakes "ไหล่" และโยนเครื่องยนต์และตามด้วยสกรู



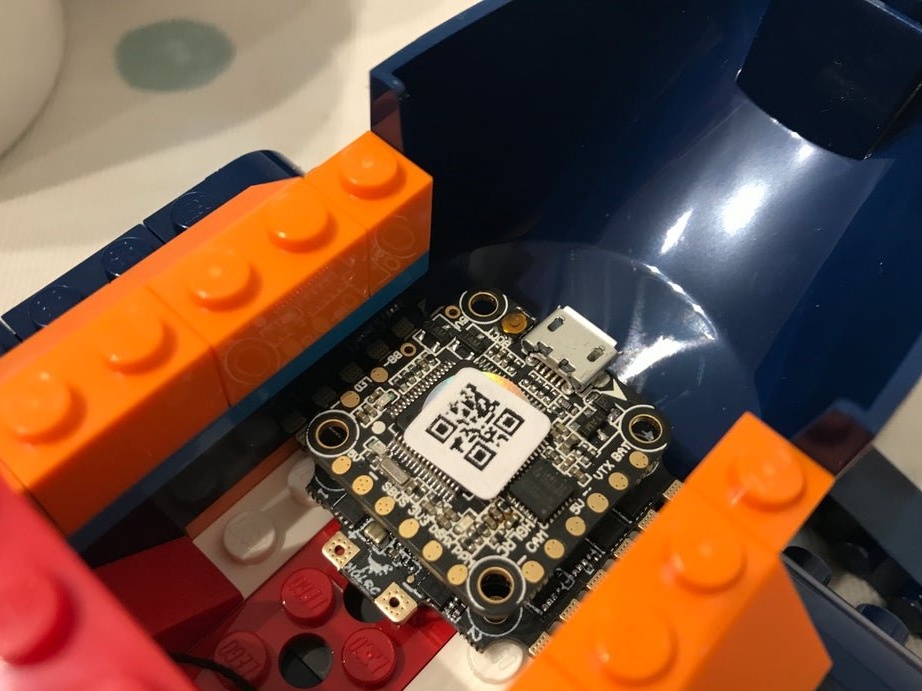
ขั้นตอนที่สี่: อิเล็กทรอนิกส์
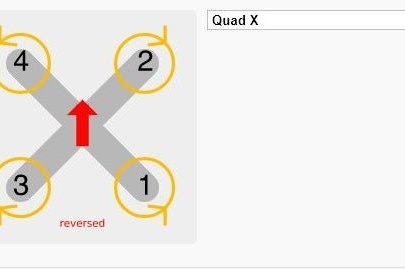
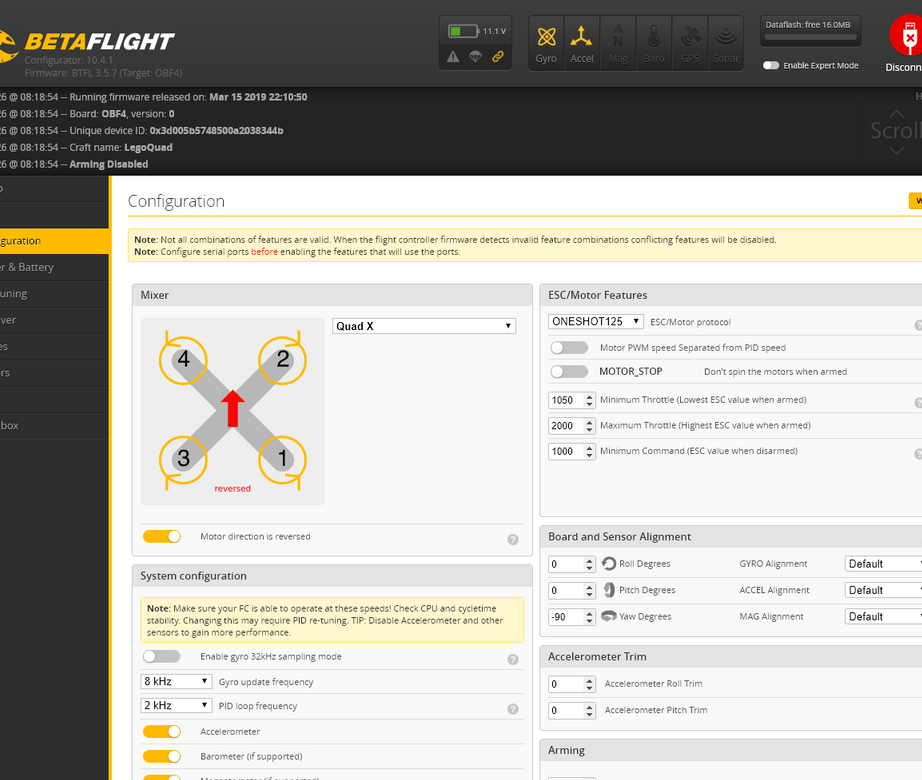
ตามรูปแบบจะติดตั้งอุปกรณ์อิเล็กทรอนิกส์ ภาพถ่ายแรกแสดงไดอะแกรมของทิศทางการหมุนของเครื่องยนต์ ทิศทางของการหมุนสามารถเปลี่ยนแปลงได้ในขั้นตอนการตั้งโปรแกรม
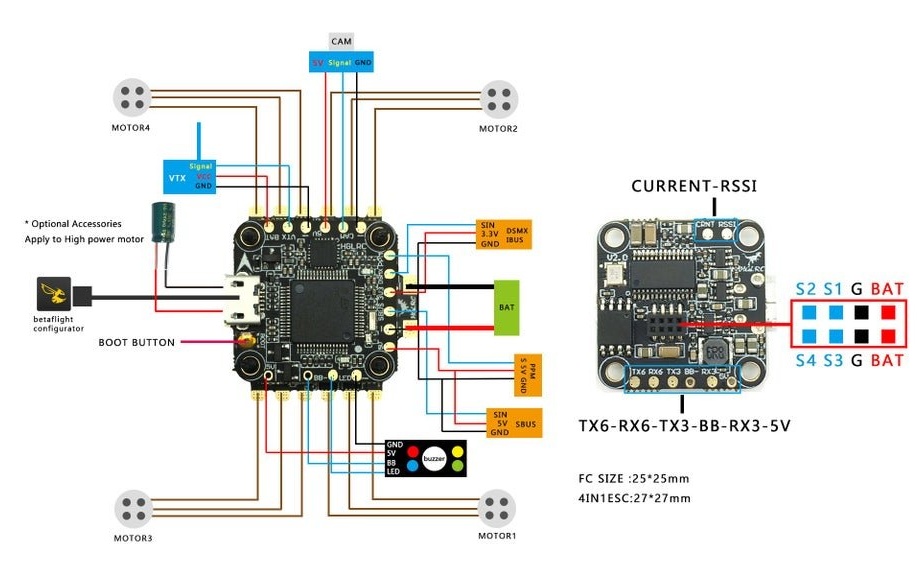

หลังจากการติดตั้งเสร็จสิ้นและก่อนเชื่อมต่อแบตเตอรี่ตัวช่วยสร้างจะตรวจสอบการเชื่อมต่อเพื่อป้องกันการแตกหักหรือลัดวงจร
เมื่อคุณเปิดเครื่องคุณจะเห็นไฟบนตัวควบคุมการบินและเสียงบี๊บจาก ESC
ขั้นตอนที่ห้า: ตั้งค่า
ตอนนี้ทุกอย่างเชื่อมต่อถึงเวลาที่จะกำหนดค่าตัวควบคุมซึ่งหมายถึงการดาวน์โหลดซอฟต์แวร์ (ซอฟต์แวร์ฝังตัว) ที่ทำหน้าที่ถอดรหัสสัญญาณควบคุมจากตัวส่งสัญญาณ RC ประมวลผลสัญญาณอินพุตเซ็นเซอร์ (คันเร่ง, ไจโรสโคป) และให้สัญญาณควบคุมสำหรับ ESC เพื่อหมุนเครื่องยนต์ด้วยความเร็วที่กำหนด
ลบใบพัดเพื่อความปลอดภัย! ไม่จำเป็นต้องใช้แบตเตอรี่สำหรับขั้นตอนการตั้งค่าแรก ๆ เพียงแค่ใช้พลังงาน USB
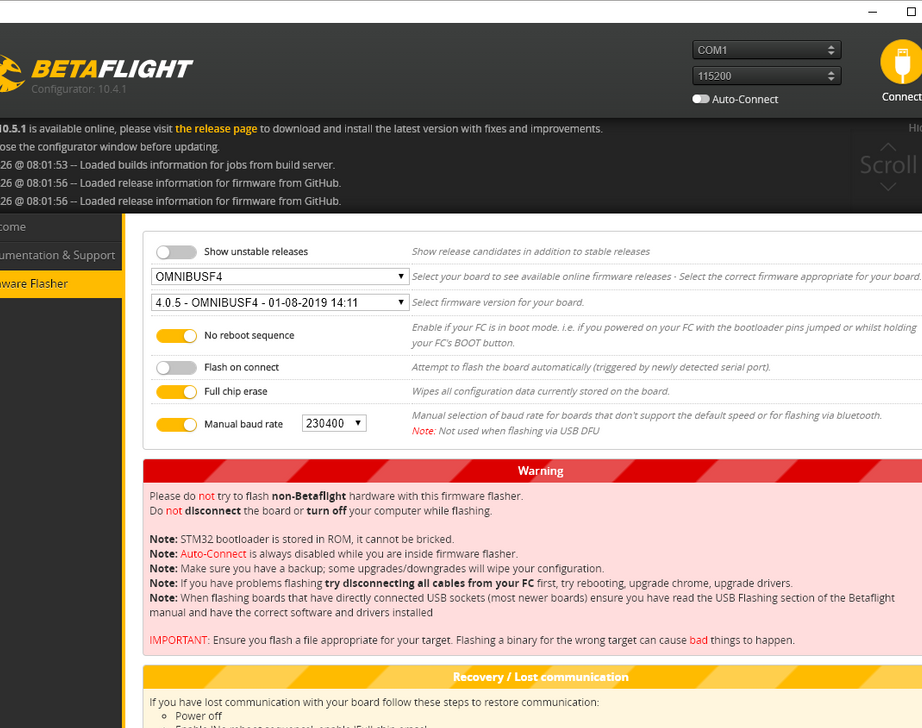
ดาวน์โหลด Beta Configurator
เชื่อมต่อสายเคเบิล micro USB เข้ากับคอนโทรลเลอร์เที่ยวบิน โปรดทราบว่าสิ่งนี้อาจทำได้ง่ายกว่าหากตัวควบคุมไม่ได้ถูกขันเข้ากับตัวเครื่อง
ดาวน์โหลดและอัพโหลดเฟิร์มแวร์ที่เหมาะสมสำหรับตัวควบคุมเที่ยวบิน
betaflight-ตั้งค่า legoquad.txt
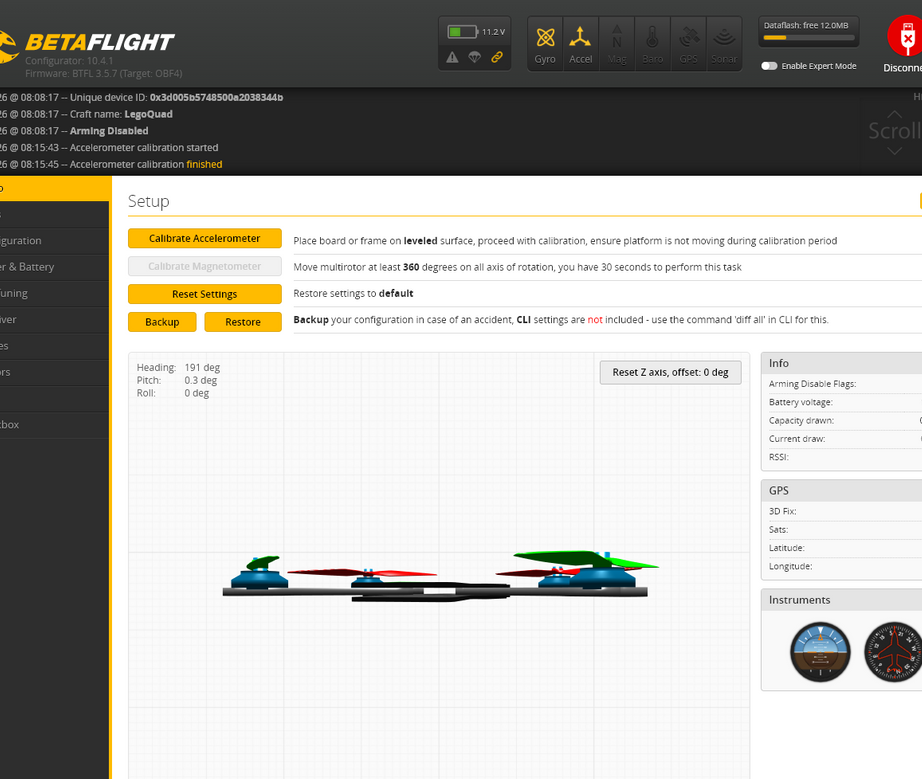
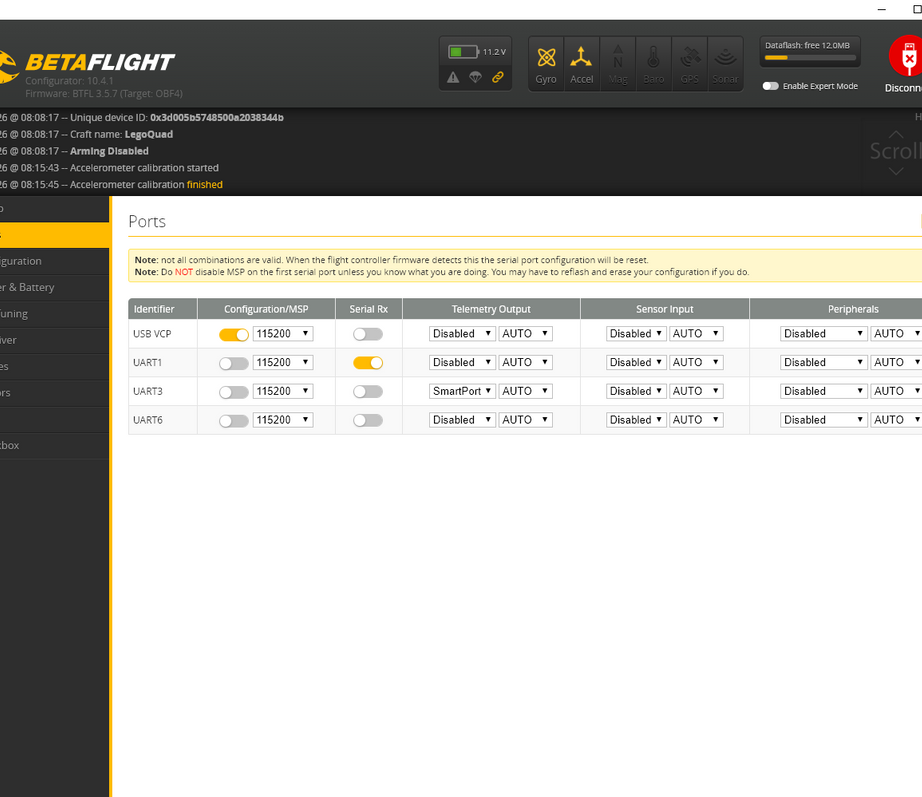
คลิกปุ่ม“ เชื่อมต่อ” และกำหนดค่าการตั้งค่าต่อไปนี้:
1. การตั้งค่า - การสอบเทียบรุ่นของเครื่องยนต์
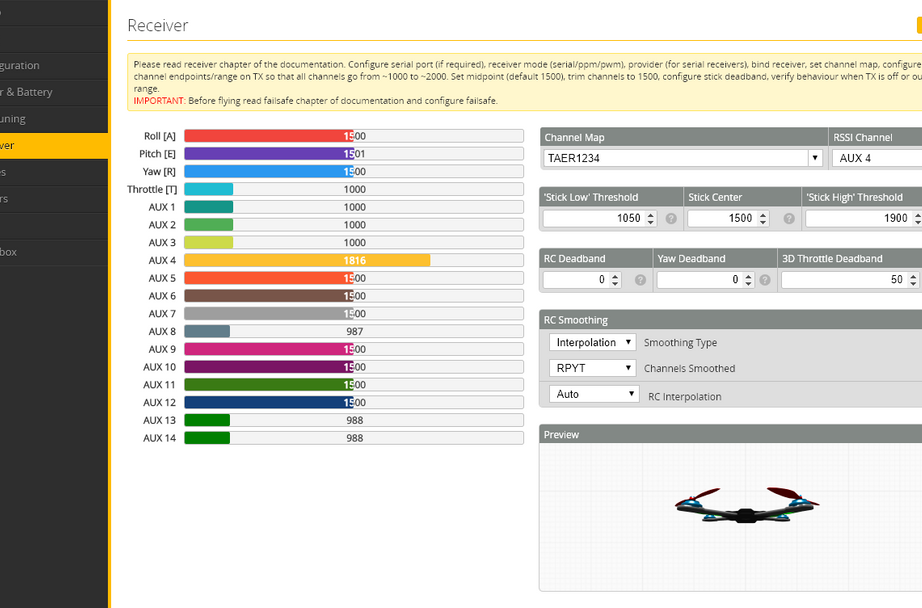
2. ระบุพอร์ต - UART1 - Serial RX สำหรับเชื่อมต่อตัวรับ SBUS RC
3. การบันทึกและการรีบูตเครื่อง
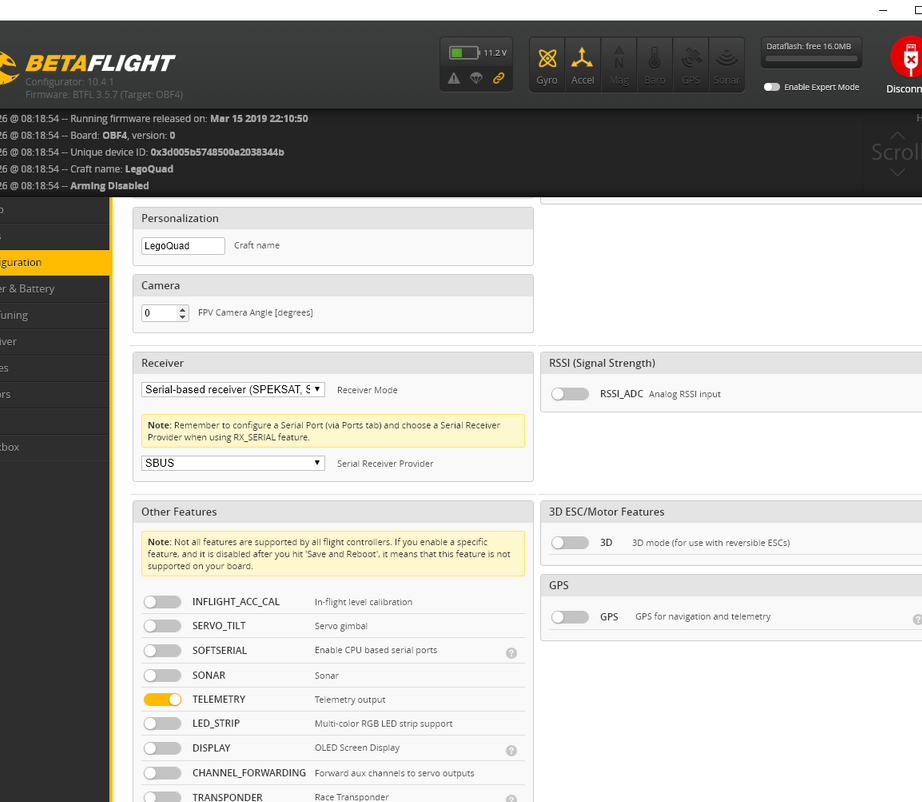
4. สร้างการเชื่อมต่อระหว่างเครื่องรับและเครื่องส่งสัญญาณ
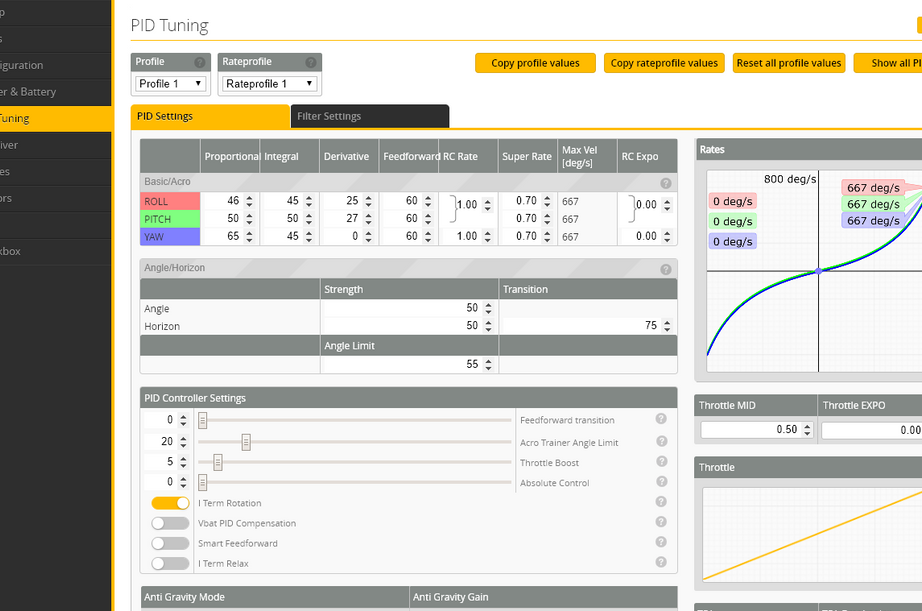
5. เกินพิกัด
6. ค่าสำหรับต้นแบบ PID ตั้งไว้ที่ 250
7 เชื่อมต่อแบตเตอรี่
8. ปรับแรงดันไฟฟ้า
9. ตรวจสอบให้แน่ใจว่าช่องสัญญาณที่แสดงและทิศทางการควบคุมของคุณนั้นถูกต้องเมื่อทุกอย่างถูกตั้งค่ารูปแบบ quadcopter ที่มุมล่างขวาควรเคลื่อนที่ในทิศทางที่ถูกต้องทั้งหมดเมื่อเลื่อนก้านควบคุมบนคอนโทรลเลอร์ RC
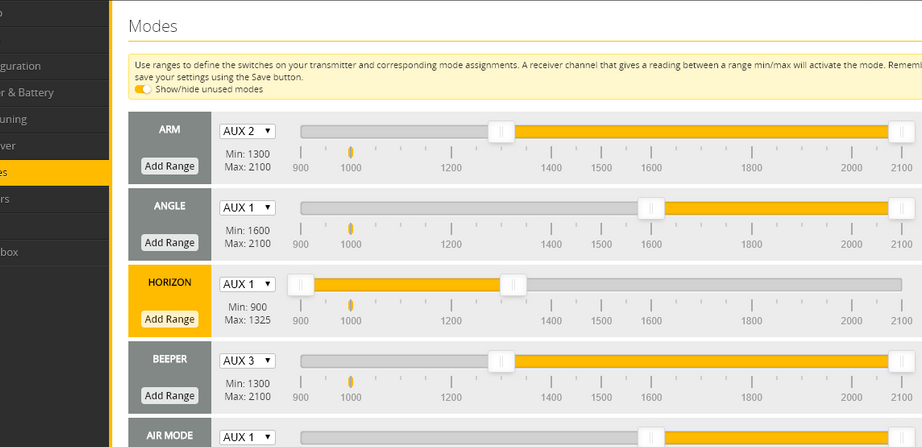
กำหนดค่าโหมด
ARM เปิด / ปิด
HORIZON การปรับระดับด้วยตนเอง / ACRO สำหรับเที่ยวบิน FPV แบบดั้งเดิม
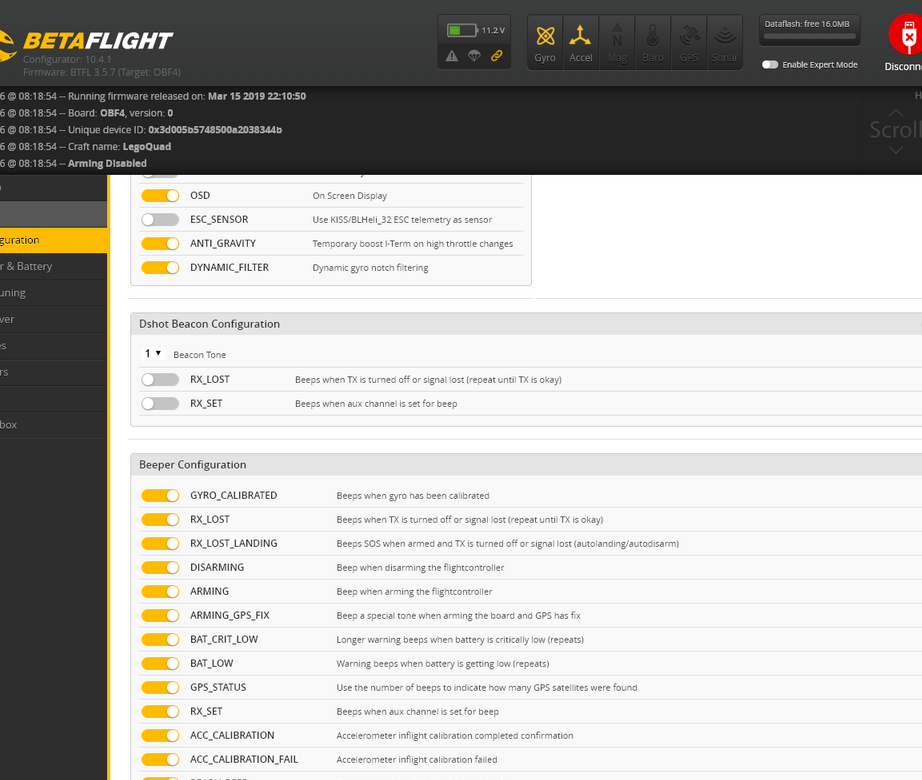
BEEPER - มีประโยชน์ถ้าคุณทำแบบจำลองหายในหญ้าหรือพุ่มไม้สูง
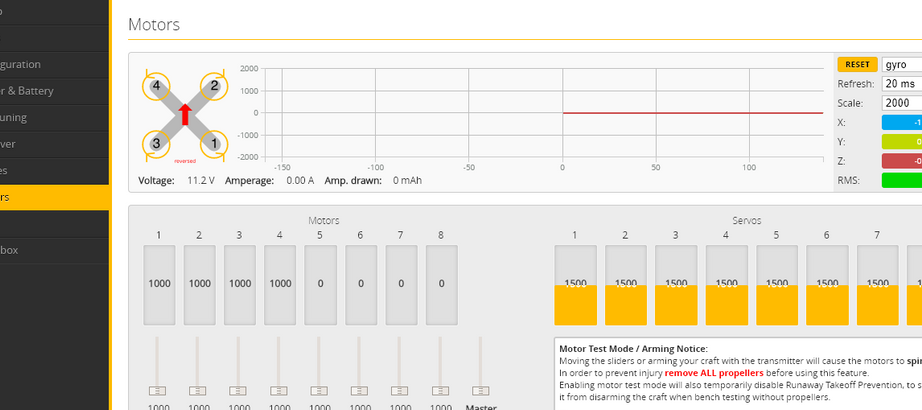
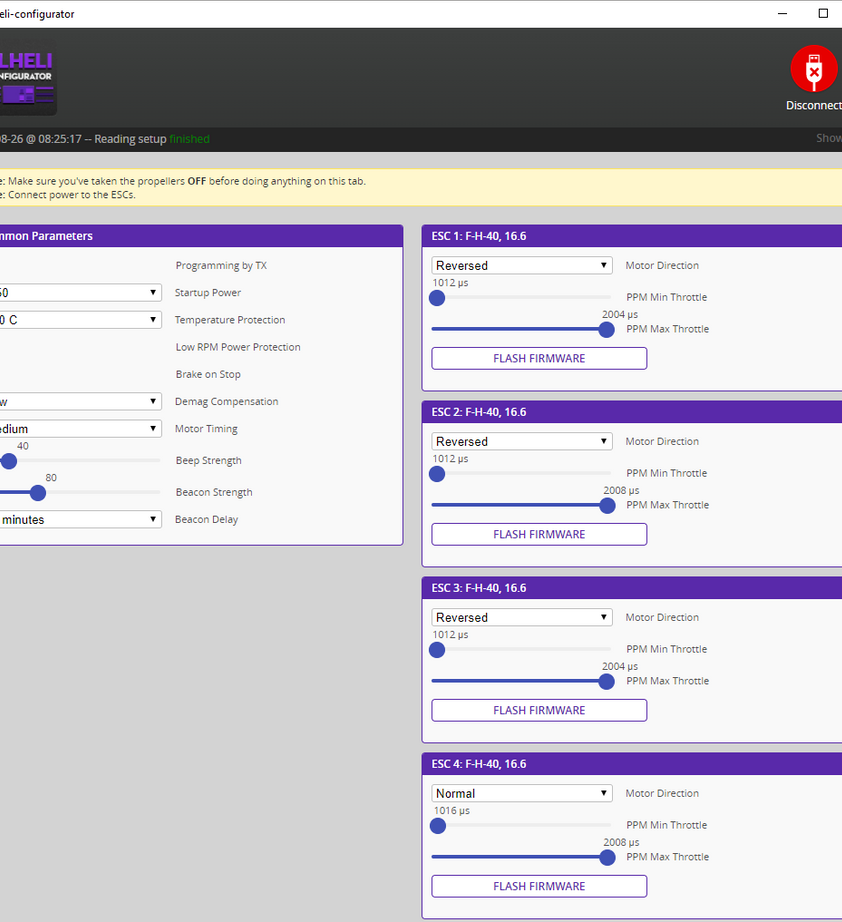
แท็บ“ มอเตอร์” - ใช้ตัวเลือกนี้เพื่อตรวจสอบเครื่องยนต์แต่ละตัวและที่สำคัญทำเครื่องหมายทิศทางการหมุนของแต่ละเครื่องยนต์
แก้ไขทิศทางการหมุนผิดด้วยตัวกำหนดค่า BLHELI
หลังจากทำตามขั้นตอนเหล่านี้คุณสามารถถอด USB และแบตเตอรี่ออกแล้วเปิดเครื่องและตรวจสอบว่าทุกอย่างทำงานได้:
เปิดเครื่องส่งสัญญาณและกำลังไฟ
เชื่อมต่อแบตเตอรี่และติดตั้ง Quadrocopter บนพื้นผิวที่เรียบ
เปิดสวิตช์ ARM และมอเตอร์ควรเริ่มหมุนด้วยความเร็วต่ำ
ตรวจสอบคันเร่งในขณะที่เพิ่มความเร็ว
ในโหมดแนวนอนลองเอียงสี่เหลี่ยมและตรวจสอบให้แน่ใจว่าเครื่องยนต์ตอบสนองอย่างเหมาะสมเช่นเอียงไปข้างหน้าและเครื่องยนต์ด้านหน้าจะเร่งความเร็ว

ขั้นตอนที่หก: การประกอบขั้นสุดท้าย
โครงสร้างทั้งหมดของเคสนั้นถูกล็อคด้วยตัวยึด ต้นแบบใช้กาวร้อนละลายเพื่อติดตั้งมอเตอร์เท่านั้น


ทุกอย่างพร้อมและคุณสามารถทดสอบ



