

อีกหัวข้อที่น่าสนใจในช่วงฤดูร้อนคือการลากจูงใต้น้ำ หากขรุขระรถลากจูงใต้น้ำเป็นอุปกรณ์ลากจูงสำหรับเคลื่อนย้ายคนใต้น้ำ หอคอยดังกล่าวได้กลายเป็นที่นิยมเมื่อเร็ว ๆ นี้ ตามที่ผู้เขียนประกอบของมันถูกกว่า analogues ซื้อ ฉันจะพยายามถ่ายทอดความหมายของบทความของเขาอย่างแม่นยำรวมถึงลิงก์ทั้งหมด
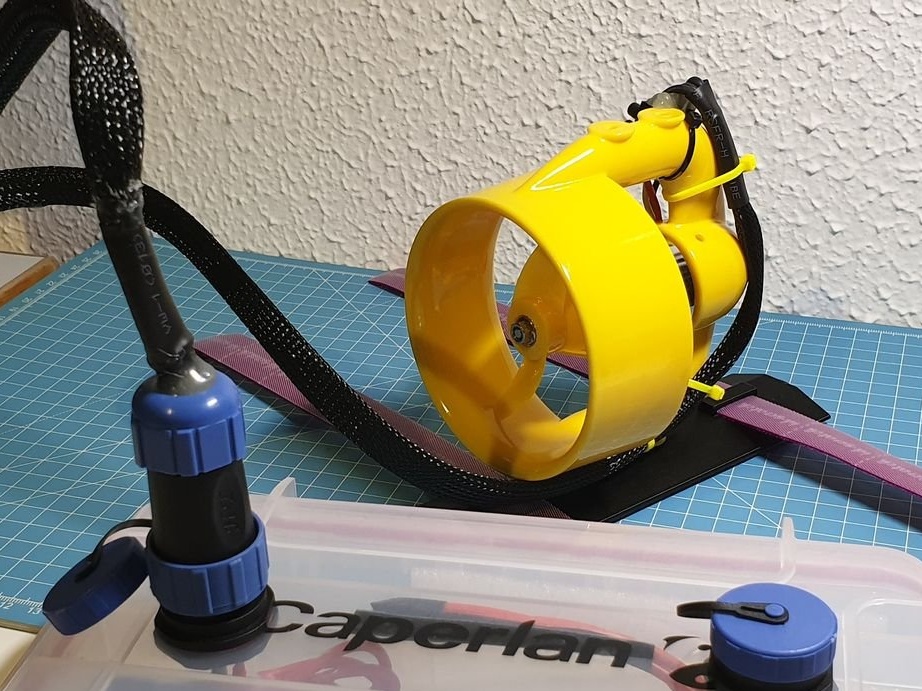
ความคิดคือการสร้างทรัสเตอร์ใต้น้ำในรูปแบบของ jetpack (ติดกับแขนและขา) ที่ทรงพลังและเชื่อถือได้ แต่ในราคาที่ถูกที่สุด!
วัสดุ:
สำหรับเครื่องยนต์
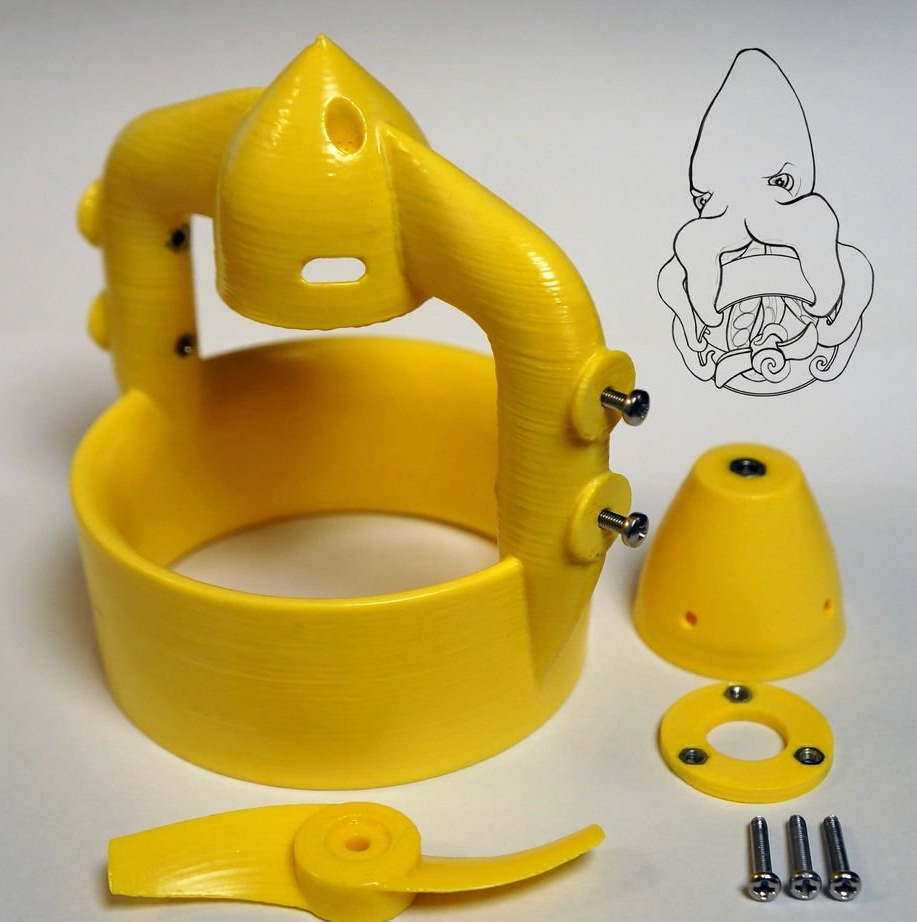
1. กรณีด้วยสกรู
ผู้ผลิตทำงานได้อย่างยอดเยี่ยมในการสร้างเครื่องมือที่มีประสิทธิภาพมาก
คุณสามารถซื้อได้
2. มอเตอร์ไร้แปรง
3. อีพ็อกซี่ความหนืดต่ำบางชนิดเพื่อปกป้องเครื่องยนต์จากการกัดกร่อน (โดยเฉพาะในน้ำเค็ม)
สาย AWG 4.16
5. ความร้อนท่อหดและฉนวนถักเปีย / หลอด PET
6. วงเล็บพิมพ์ 3 มิติ .
สำหรับหน่วยควบคุมและการควบคุมระยะไกล
1. ในฐานะที่เป็นกล่องกันน้ำผู้เชี่ยวชาญได้เลือกผลิตภัณฑ์อย่างใดอย่างหนึ่ง
2. สอง ESC คุณจะต้องมีอย่างน้อย ESC ที่ 30A
3. ซ็อกเก็ตกันน้ำสองอันสำหรับเชื่อมต่อเครื่องยนต์กับชุดควบคุม
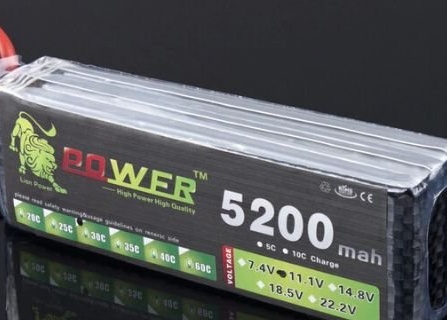
4. แบตเตอรี่ 3S Lipo บางตัว (ผู้เขียนมีสอง 5000mAh 20C จาก HobbyKing พอดีกับกล่องกันน้ำ)
5. ตัวเชื่อมต่อหญิง XT60 สองตัวสำหรับเชื่อมต่อสาย ESC กับแบตเตอรี่ Lipo (หากแบตเตอรี่ของคุณมีขั้วต่อ XT60)
6. ในฐานะที่เป็นรีโมตคอนโทรลผู้เขียนใช้กันน้ำไร้สายที่ออกแบบมาสำหรับสเก็ตบอร์ดไฟฟ้า
นั่นคืองบประมาณประมาณ $ 150
ขั้นตอนที่ 1: สร้างเครื่องมือ
เพิ่มอีพอกซีบางส่วนลงในมอเตอร์แบบไร้แปรงที่ถอดแยกชิ้นส่วนเพื่อป้องกันสายไฟจากน้ำ
ปฏิบัติตามคำแนะนำที่กำหนดโดย rovthruster เพื่อประกอบหัวฉีดเครื่องยนต์และใบพัด
บัดกรีสายเคเบิล 16AWG ขนาด 1 เมตรไปยังสายมอเตอร์สามเส้นและป้องกันการบัดกรีด้วยท่อความร้อน
เคลือบสายไฟด้วยฉนวนกันความร้อน PET ถักเปีย
บัดกรีสายไฟเข้ากับขั้วต่อกันน้ำ
ขันสกรูเข้ากับโครงยึด
ทำซ้ำการทำงานสำหรับเอ็นจินที่สอง






ขั้นตอนที่ 2: เตรียมกล่องควบคุมกันน้ำ
อาจารย์ไม่ได้จัดเตรียมไดอะแกรม แต่ฉันคิดว่ามันคงไม่ยากที่จะคิดออกหากคุณต้องการ
เจาะสองรูที่มีเส้นผ่านศูนย์กลาง 21 มม. ที่กลางกล่อง
ติดตั้งตัวเชื่อมต่อน้ำสองช่องและตรวจสอบให้แน่ใจว่าติดตั้งซีลยางอย่างถูกต้อง
บัดกรีสายไฟจากขั้วต่อไปยัง ESC
ประสานตัวเชื่อมต่อ XT60 กับ ESC
เชื่อมต่อตัวรับสัญญาณรีโมทคอนโทรลเข้ากับ ESC





นอกจากนี้อาจารย์ก็โพสต์วิดีโอตัวอย่าง