


ฉันได้มีส่วนร่วมในการออกแบบของฉันจากคำแนะนำการประกอบสำหรับ Lego Technic 42049 และ Lego Technic 42041 ส่วนที่เหลือคือการปรับตัวของฉัน สำหรับการควบคุมฉันจะใช้โมดูล Bluetooth ที่เชื่อมโยงกับอุปกรณ์ android หรือคอมพิวเตอร์ ดังนั้นเราต้องการ:
- เลโก้เทคนิค 42029
- เลโก้เทคนิค 42033
- Arduino Pro Mini 5v AT Mega 328
- ไดรเวอร์เครื่องยนต์ L9110S
- ไดรฟ์เซอร์โว 1 SG-90
- โมดูลบลูทู ธ HC-05 หรือเทียบเท่า
- USB-UART สำหรับเฟิร์มแวร์ Arduino
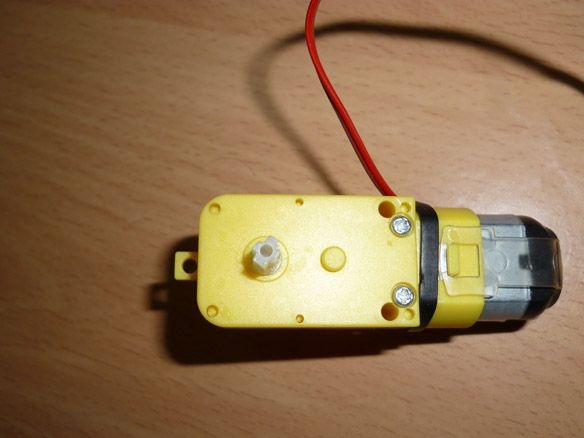
- มอเตอร์เกียร์ 6v 1: 150 100 รอบต่อนาที
- LED 2 ดวง
- ตัวต้านทาน 2 ตัว 150 โอห์ม
- ตัวเก็บประจุ 10v 1000uF
- หวีเดี่ยว 2 แถว PLS-40
- ตัวเหนี่ยวนำ 68mkGn
- แบตเตอรี่ NI-Mn 1.2v 1,000mA จำนวน 6 ก้อน
- เชื่อมต่อพ่อแม่สองขากับสาย
- Homutik
- สายไฟที่มีสีต่างกัน
- ประสาน
- ขัดสน
- หัวแร้ง
- สลักเกลียว 3x20 ถั่วและแหวนสำหรับพวกเขา
- สลักเกลียว 3x40
- สลักเกลียว 3x60
ขั้นตอนที่ 1 ชุดเพลาล้อหลัง
การเคลื่อนที่ไปข้างหน้า - ถอยหลังจะดำเนินการโดยมอเตอร์เกียร์ที่มีมอเตอร์ 6V อัตราส่วนเกียร์ 1: 150 และความเร็วรอบเดินเบาที่ 100 รอบต่อนาที คุณสามารถลองใช้อัตราทดเกียร์อื่นได้ แต่ในความคิดของฉันมันดีที่สุด แกนกระปุกทั้งสองด้านจะต้องถูก incised ในรูปของไม้กางเขนและใส่รายละเอียดเลโก้:
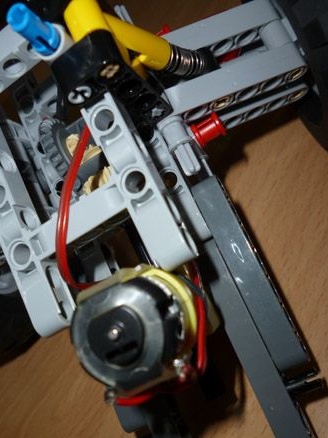
ต่อไปเราจะรวบรวมพื้นฐานของเพลาหลังตามคำแนะนำของ Lego 42029 ตอนที่ 1 โดยเริ่มจาก 3 หน้าเป็น 8 รวม และเพิ่มรายละเอียดเล็กน้อยเพื่อให้คุณสามารถติดตั้งเครื่องยนต์และเกียร์
ดูไฟล์ออนไลน์:
ดูไฟล์ออนไลน์:



ขั้นตอนที่ 2 การประกอบเพลาหน้า
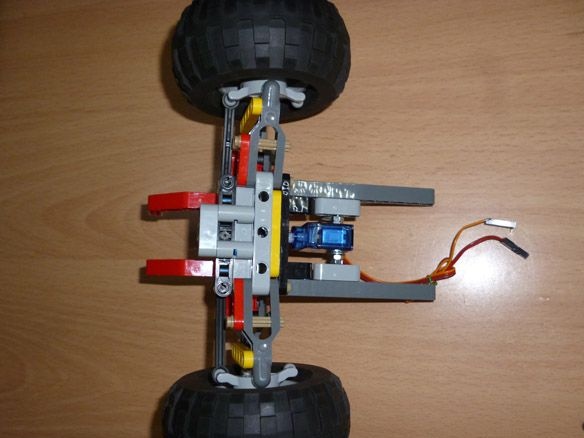
เราประกอบส่วนหน้าของช่วงล่างตามคำแนะนำของเลโก้ 42029 ตอนที่ 1 จากหน้า 21 ถึง 23 เรานำรูปสี่เหลี่ยมคางหมูจากส่วนที่สองของเลโก้จากหน้า 6 ถึง 11 Servo SG-90 เหมาะสำหรับการหมุนล้อ ในการยึดติดกับแบบจำลองของเรานั้นจำเป็นต้องเจาะอย่างระมัดระวังเพื่อไม่ให้ชิ้นส่วนภายในของเซอร์โวเจาะผ่านรูที่มีเส้นผ่านศูนย์กลาง 3.2 มม. หรือเพียงแค่ตัดด้วยมีดสเตชันเนอรี และยังตัดส่วนที่ยื่นออกมา (“ ปีก” เพื่อทำการยึด) เราใส่สลักเกลียวลงในรูที่ทำและยึดด้วยน็อต บนเพลาของเซอร์โวเราวางคันโยกที่มีชิ้นส่วนที่เมาจากเลโก้:





ขั้นตอนที่ 3 การประกอบฐานและห้องโดยสาร
เราเชื่อมต่อบริดจ์ทั้งสองดังที่แสดงในรูปภาพ:
เรารวบรวมห้องโดยสารตามคำแนะนำของเลโก้ 42041 เริ่มต้นจากหน้า 39 ถึง 47 ของส่วนแรก เพิ่มเติมจากหน้า 5 ถึง 28 ของส่วนที่สอง รวมทั้งกันชนในหน้า 38 ถึง 43 ของส่วนที่สองของคำแนะนำ
ดูไฟล์ออนไลน์:
ดูไฟล์ออนไลน์:


ดูไฟล์ออนไลน์:
ดูไฟล์ออนไลน์:
ขั้นตอนที่ 4 ไฟฟ้า
สำหรับการควบคุมเราจะใช้ Arduino Pro Mini และโมดูลบลูทู ธ Pro Mini สามารถแทนที่ด้วยบอร์ด Arduino อื่น ๆ ฉันเลือก Pro Mini ดังนั้นมันจึงเล็กที่สุด จำเป็นต้องใช้ไดรเวอร์ของมอเตอร์ในการเชื่อมต่อมอเตอร์
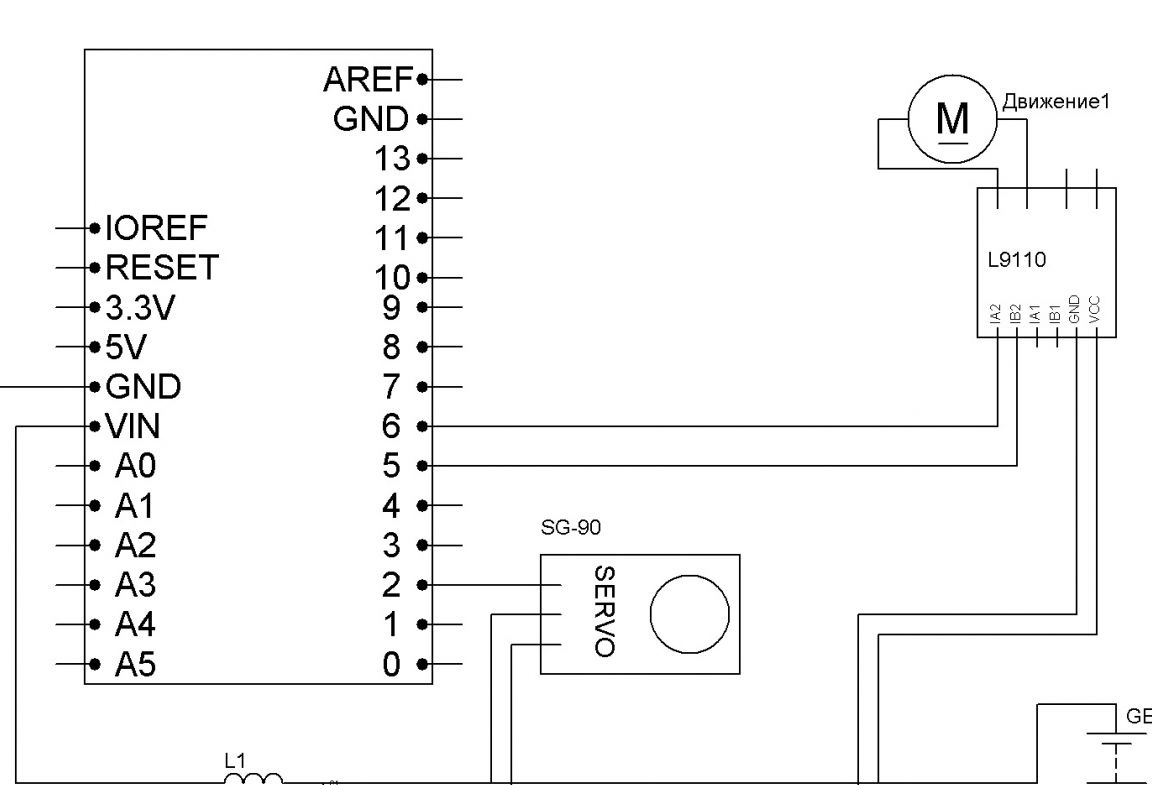
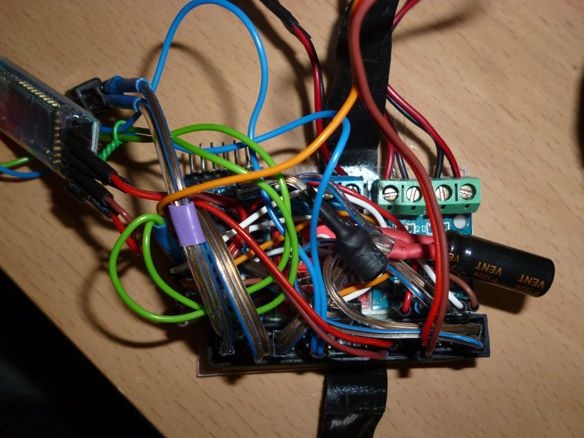
การเชื่อมต่อของส่วนประกอบทั้งหมดด้วยสาย Dupont Mother-to-Mother พลังงาน - แบตเตอรี่ NI-Mn 1.2v 1000mA จำนวน 6 ก้อนเชื่อมต่อกัน ตัวเก็บประจุของพลังงานต่ำใด ๆ ตัวเหนี่ยวนำนอกจากนี้คุณจะพบว่าคุณจะต้องรักษาเสถียรภาพของไมโครคอนโทรลเลอร์ ขั้วบวกของ LED สองดวงเชื่อมต่อกับ arduino 4 พินซึ่งเป็นแคโทดไปยัง GND ตัวต้านทานถูกเลือกสำหรับ LED ที่ใช้ เพื่อความสะดวกโปรดม้วนแบตเตอรี่ด้วยเทป

เราติดเทปทั้งหมดลงบนเทปกาวสองหน้าบนพื้นฐานของ:
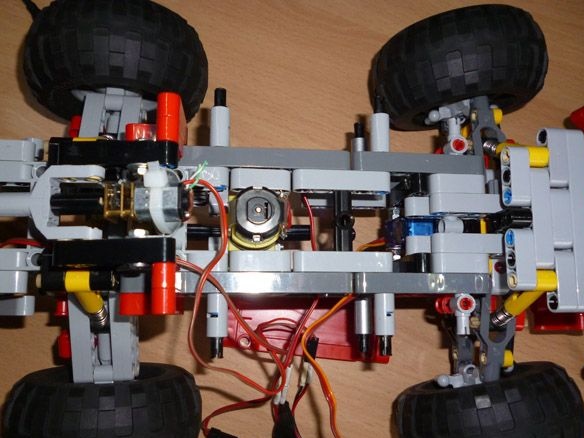
เราวางช่างไฟฟ้าของเราไว้ระหว่างล้อรถ
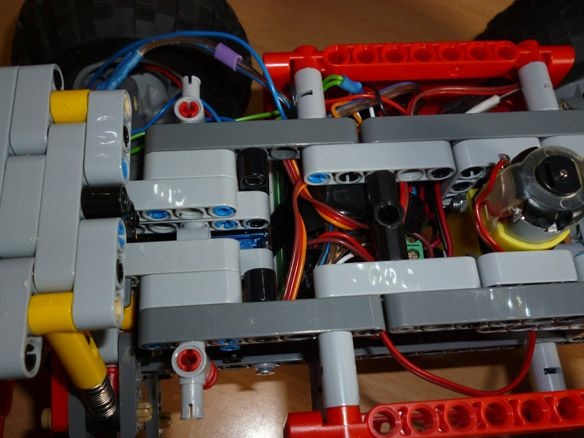
เพิ่มสองจังหวะ:


ขั้นตอนที่ 5 การตั้งค่าบลูทู ธ
โมดูลบลูทู ธ ราคาไม่แพงที่สุดในวันนี้คือ HC-05 และ HC-06 พวกเขามีมากมายในร้านค้าออนไลน์ของจีน ความแตกต่างระหว่างพวกเขาคือครั้งแรกที่สามารถทำงานได้ทั้งในโหมดต้นแบบ (ทาส) และในโหมดทาส (หลัก) ประการที่สองเป็นอุปกรณ์ทาสอย่างหมดจด กล่าวอีกนัยหนึ่ง HC-06 ไม่สามารถตรวจจับอุปกรณ์ที่จับคู่และสร้างการเชื่อมต่อกับมันมันสามารถเชื่อฟังหลัก
ลักษณะโดยย่อของโมดูล:
- ชิปบลูทู ธ - BC417143 ผลิตโดย
- โปรโตคอลการสื่อสาร - ข้อมูลจำเพาะบลูทู ธ v2.0 + EDR;
- รัศมีของการกระทำ - สูงสุด 10 เมตร (ระดับพลังงาน 2)
- เข้ากันได้กับอะแดปเตอร์บลูทู ธ ทั้งหมดที่รองรับ SPP;
- จำนวนหน่วยความจำแฟลช (สำหรับจัดเก็บเฟิร์มแวร์และการตั้งค่า) - 8 Mbit;
- ความถี่ของสัญญาณวิทยุ - 2.40 .. 2.48 GHz;
- ส่วนต่อประสานโฮสต์ - USB 1.1 / 2.0 หรือ UART;
- การใช้พลังงาน - กระแสระหว่างการสื่อสารคือ 30-40 mA ค่าเฉลี่ยปัจจุบันประมาณ 25 mA หลังจากสร้างการสื่อสารแล้วปริมาณการใช้ปัจจุบันคือ 8 mA ไม่มีโหมดสลีป
โดยปกติโมดูลจะขายเป็นสองบอร์ดบัดกรีด้วยกัน อันที่เล็กกว่านั้นเป็นโมดูลของโรงงาน อิเล็กทรอนิกส์ อุปกรณ์ ใหญ่ - เขียงหั่นขนมพิเศษสำหรับ DIY
นี่คือลักษณะของโมดูล DIY สำหรับ HC-05 และ HC-06:
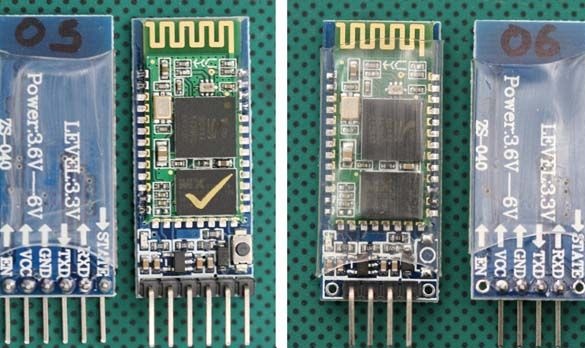
โดยหลักการแล้วคุณสามารถใช้โมดูลใดก็ได้ที่คุณต้องการ โมดูลที่ไม่มีเขียงหั่นขนมมีค่าใช้จ่ายน้อยกว่า แต่คุณจะต้องดูแลแหล่งจ่ายไฟ 3.3 V สำหรับโมดูลและทรมานด้วยตัวคุณเองด้วยการบัดกรีสายไฟเข้ากับโมดูล ฉันเลือกที่ดีที่สุดในความคิดของฉันในราคา / อัตราส่วนการทำงาน HC-06
เราเชื่อมต่อดังนี้:
Arduino Pro Mini - บลูทู ธ
D7 - RX
D8 - TX
5V - VCC
GND –GND
เพื่อการทำงานที่เหมาะสมจะต้องกำหนดค่าโมดูล เราจะกำหนดค่าคำสั่ง AT ที่ป้อนลงในหน้าต่างเทอร์มินัล ฉันยกตัวอย่างการตั้งค่าโมดูล HC-05 หากคุณมีการตั้งค่าที่แตกต่างกันอาจแตกต่างกัน เพื่อให้โมดูลของเราได้รับคำสั่งก่อนอื่นเราแฟลช Arduino ด้วยเฟิร์มแวร์ต่อไปนี้:
ในกรณีนี้ Arduino ทำหน้าที่เป็นสะพานเชื่อมระหว่างคอมพิวเตอร์และโมดูล ในเฟิร์มแวร์ฉันใช้ห้องสมุด SoftwareSerial ที่ความเร็วสูงมันทำงานได้ไม่เสถียร หากคุณต้องการความเร็วสูงคุณสามารถเชื่อมต่อโมดูลโดยตรงกับรายชื่อ Arduino RX และ TX และเขียนเฟิร์มแวร์ใหม่ แต่ในกรณีของฉันเราจะทำงานกับโมดูลที่ความเร็ว 9600 ดังนั้นหลังจากเฟิร์มแวร์เปิดเทอร์มินัลแล้วป้อน:
“ AT” (โดยไม่ใส่เครื่องหมายอัญประกาศ) คำตอบ“ OK” ควรมา (หมายความว่าทุกอย่างเชื่อมต่ออย่างถูกต้องและโมดูลทำงานอยู่)
“ AT + BAUD96000” (ไม่มีเครื่องหมายคำพูด) คำตอบ“ OK9600” ควรมา
หากคุณมีคำตอบที่ถูกต้องไปที่ขั้นตอนต่อไป
ขั้นตอนที่ 7 เฟิร์มแวร์
ในการเขียนเฟิร์มแวร์และเฟิร์มแวร์นั้นฉันใช้ Arduino IDE รุ่นปัจจุบันของวันนี้คือ 1.8 เฟิร์มแวร์จริง:
ขั้นตอนที่ 8 ตั้งค่าโทรศัพท์ของคุณ
บนโทรศัพท์ Android คุณต้องติดตั้งโปรแกรมเพื่อควบคุมหุ่นยนต์ผ่านบลูทู ธ มีจำนวนมาก คุณสามารถป้อน“ Bluetooth Arduino” ใน Google play และเลือกตามใจชอบ ฉันชอบ BT Controller ดาวน์โหลดและติดตั้งบนโทรศัพท์หรือแท็บเล็ต Android ถัดไปผ่านการตั้งค่า Android คุณจะต้องสร้างการเชื่อมต่อกับโมดูลของเรา รหัสผ่านสำหรับการเชื่อมต่อคือ "1234" หรือ "0000" ถัดไปกำหนดค่าโปรแกรมสำหรับคำสั่งที่เหมาะสม รายการด้านล่าง
ขั้นตอนที่ 9 การตั้งค่าคอมพิวเตอร์ (ถ้าจำเป็น)
หากจำเป็นหรือสะดวกในการควบคุมคุณสามารถใช้คอมพิวเตอร์หรือแล็ปท็อป ในการทำเช่นนี้คอมพิวเตอร์ต้องมีบลูทู ธ เราสร้างการสื่อสารกับโมดูลของเราผ่านการควบคุมบนคอมพิวเตอร์ ต่อไปเราต้องการเทอร์มินัลเพื่อส่งคำสั่ง สะดวกสำหรับคุณหลังจากบันทึกเฟิร์มแวร์แล้วการควบคุมจะดำเนินการโดยปุ่มต่อไปนี้ (คำสั่ง):
W - ไปข้างหน้า
กลับ -
A - ไปทางซ้าย
D - ถูกต้อง
F - หยุด
G - พวงมาลัย
K - ไฟหน้า
L - ปิดไฟหน้า
การป้อนคำสั่งอย่างต่อเนื่องไม่สะดวกดังนั้นฉันแนะนำให้ใช้โปรแกรมเพื่อส่งคำสั่ง ฉันใช้ Z-Controller ในโปรแกรมให้เลือกพอร์ต (พอร์ต com ผ่านการเชื่อมต่อ) และกำหนดค่าปุ่มสำหรับคำสั่ง ตั้งค่าว่างและใช้งานง่าย
