

คนรักวันที่ดีของ arduino! ขณะที่มันลอยอยู่ในอินเทอร์เน็ตฉันเจอบทความที่ค่อนข้างสนุกสนานเกี่ยวกับวิธีสร้างหุ่นยนต์มือที่ทำซ้ำการเคลื่อนไหวของมือของบุคคลซึ่งได้รับแรงบันดาลใจจากความเรียบง่ายและเอฟเฟกต์ ทำที่บ้าน โฮมเมดตัดสินใจที่จะรวบรวมมัน ฉันพบเซ็นเซอร์งอที่ Alliekspress สำหรับมือของเครื่องส่งสัญญาณและตายไปเล็กน้อยสิ่งหนึ่งที่ยืนอยู่ในพื้นที่ $ 15-20 ปรากฏว่าเซ็นเซอร์เหล่านี้ 5 ตัวสำหรับมือเดียวราคา 75-100 ดอลลาร์และนี่เป็นเซ็นเซอร์เท่านั้น! หลังจากนั้นครู่หนึ่งฉันเรียนรู้วิธีสร้างเซ็นเซอร์ดังกล่าว ทำมันเองมันกลายเป็นเรื่องง่ายและราคาถูก
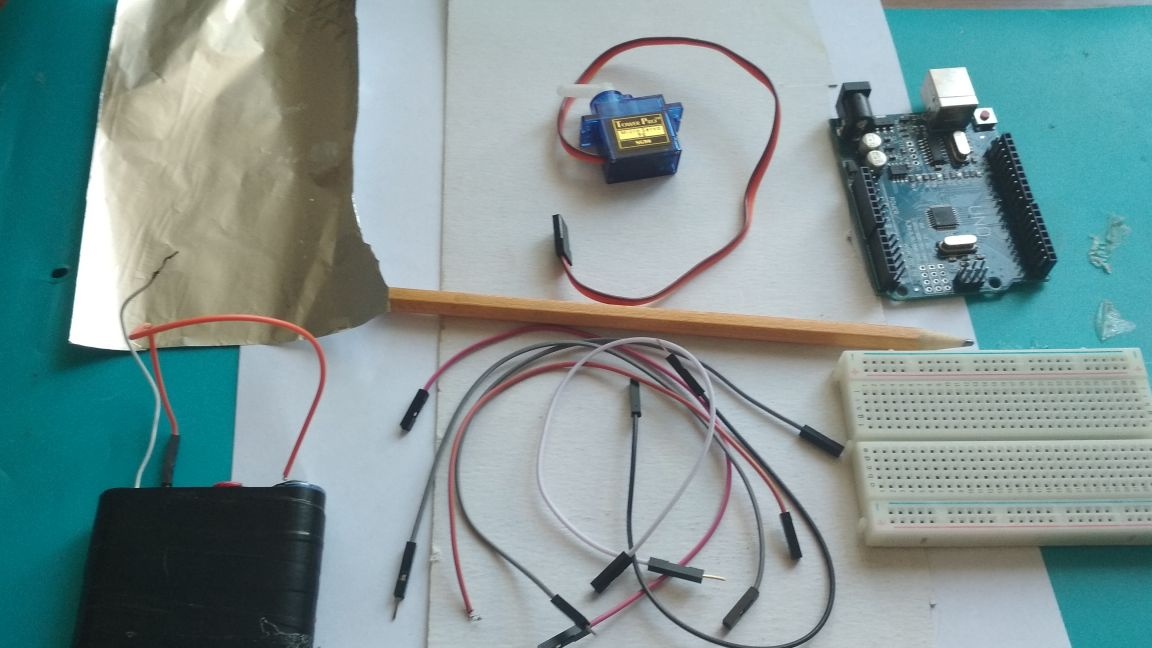
ดังนั้นสำหรับเซ็นเซอร์โค้งที่เราต้องการ:
แต่งตัว Arduino อูโน่ ()
-breadboard
- การเชื่อมต่อสายไฟเช่น "พ่อแม่" หรือ "พ่อพ่อ"
-servomotor
-karton
-bumaga
-folga
-karandash
- แหล่งจ่ายไฟ 6-12 โวลต์ (ฉันใช้แบตเตอรี่ 4 ก้อนเชื่อมต่อเป็นอนุกรมที่ 1.5 V)
จากเครื่องมือที่เราต้องการ:
ปืนกาว
-Scissors
สิ่งแรกที่เราตัดออกจากกระดาษแข็งนั้นยาวกว่าสองนิ้ว 2 นิ้วและกว้างประมาณ 1 ซม.
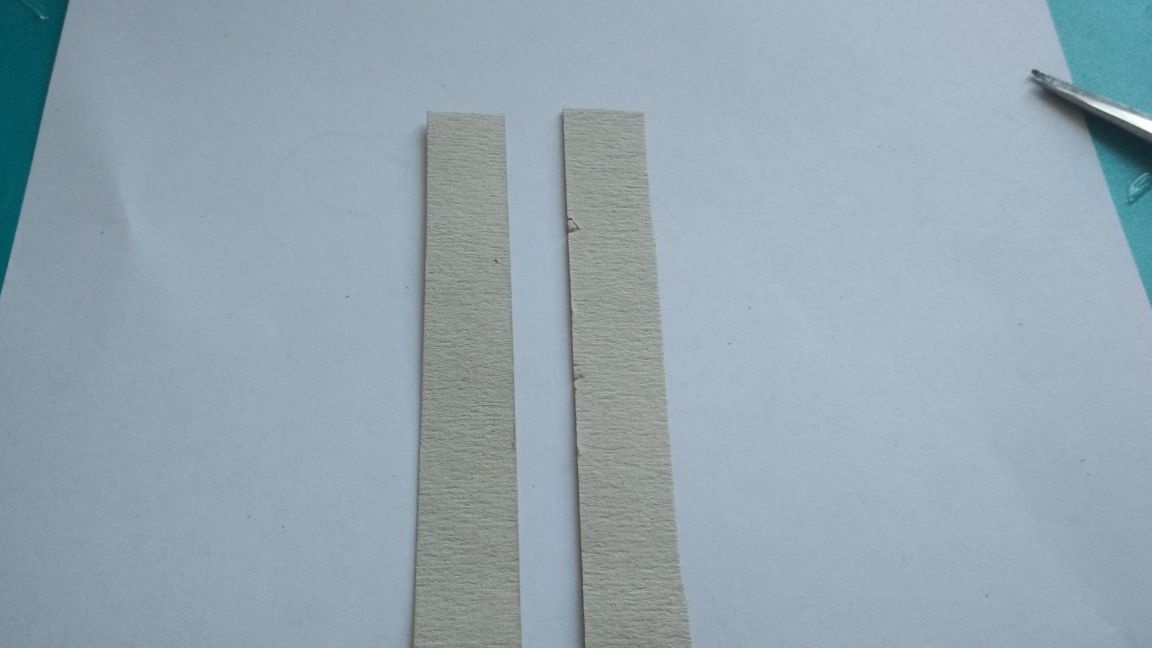

ตัดหนึ่งในแถบกระดาษเดียวกันให้น้อยลง:

ดินสอโป๊ะทั้งสองด้านของแถบกระดาษให้ดีที่สุด:


ตัดฟอยล์สองแถบที่เล็กกว่ากระดาษ:
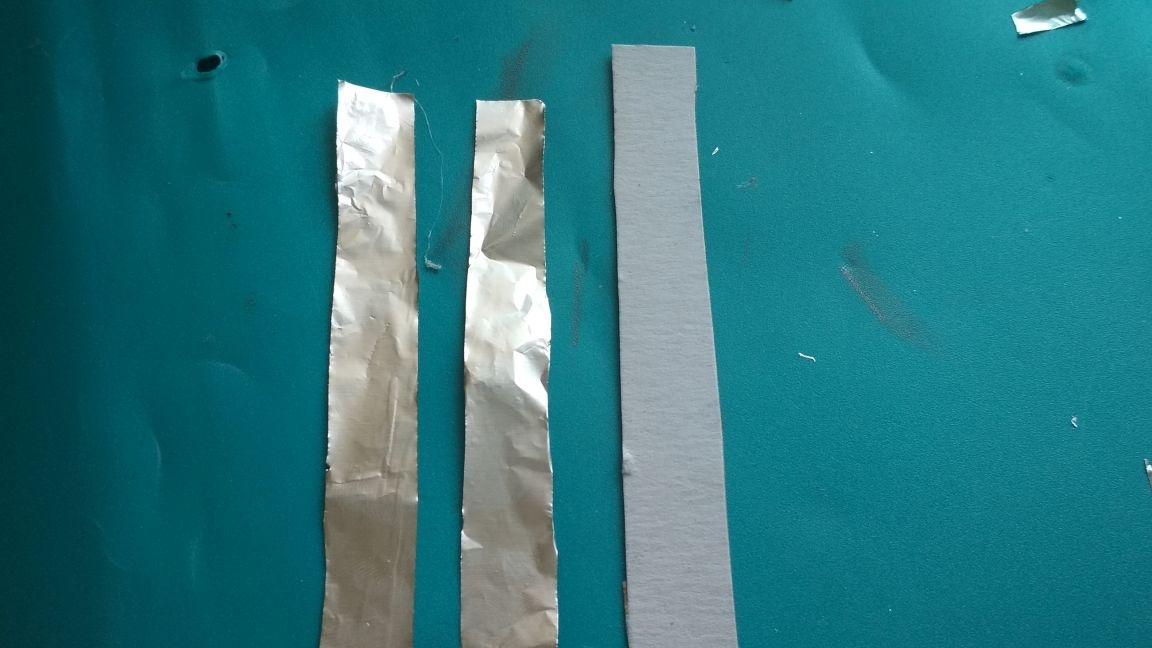
กาวลงบนแถบกระดาษแข็งดังที่แสดงในภาพ:

จากสายเชื่อมต่อ“ พ่อแม่” เราตัด“ แม่” ทางออกและเราทำความสะอาดปลายของพวกเขาจากฉนวน:
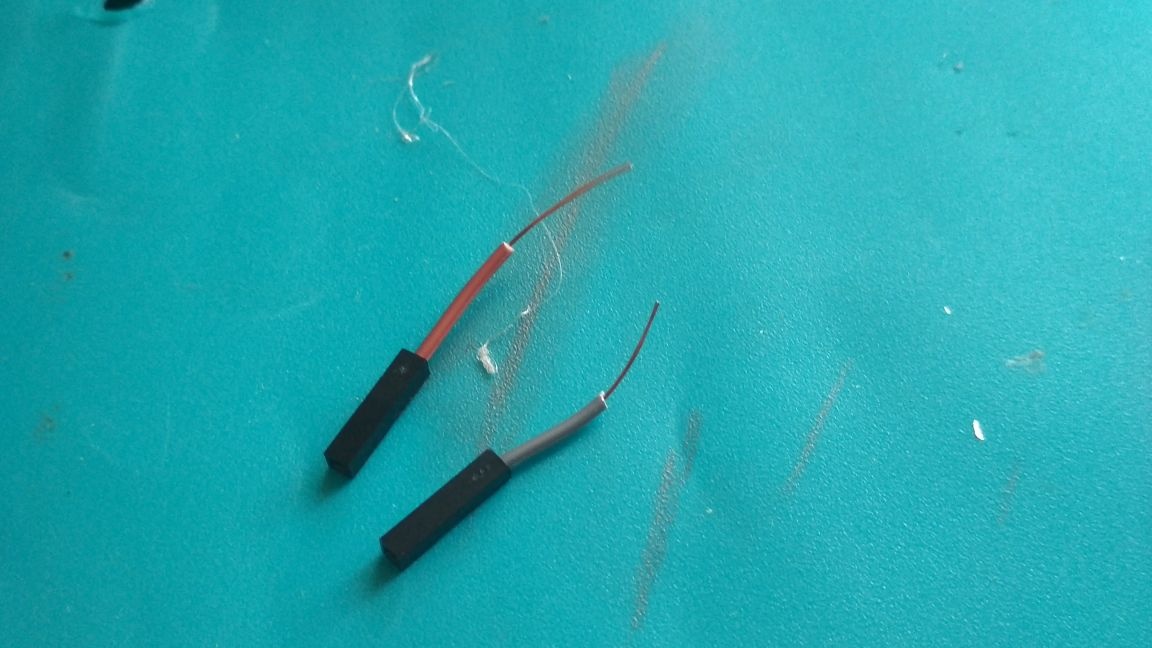
เราแนบจากเทปหรือประสาน:

เราแนบแถบกระดาษเข้ากับครึ่งหนึ่งเพื่อให้มันสัมผัสกับฟอยล์จากนั้นปิดครึ่งด้านที่เหลือด้วยกระดาษฟอยล์กดและกาวที่ด้านข้าง:

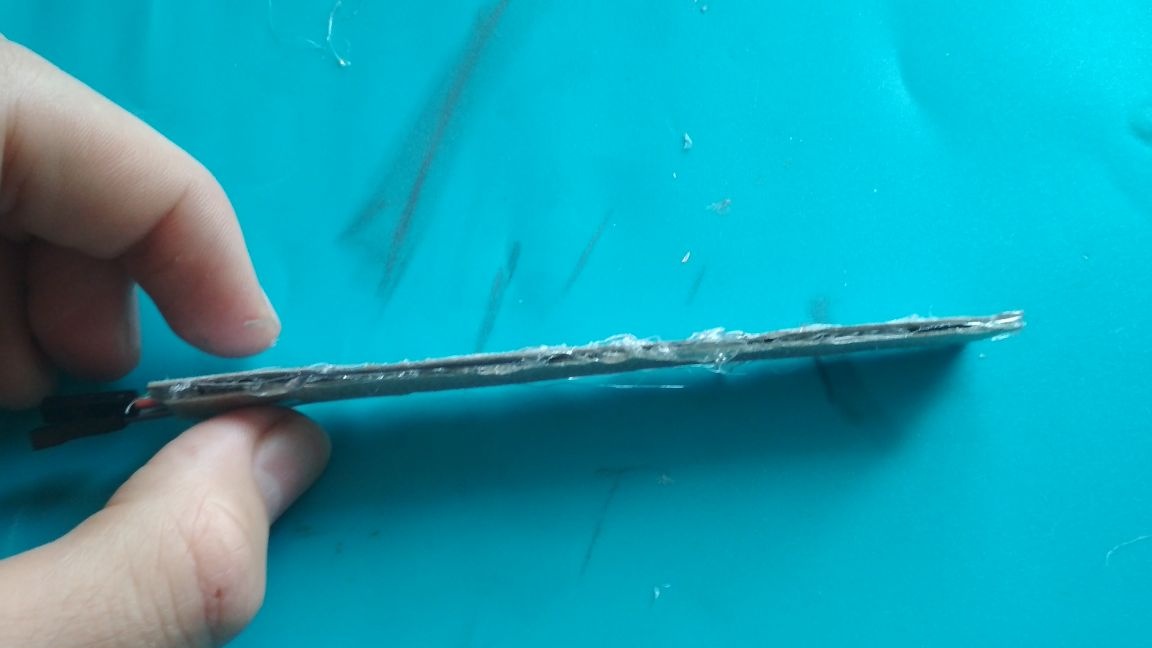

เราสร้าง "งู" ดังกล่าวในแต่ละด้านด้วยความช่วยเหลือของกาวร้อนพวกเขาต้องการเพื่อให้การออกแบบมีความยืดหยุ่นมากขึ้น

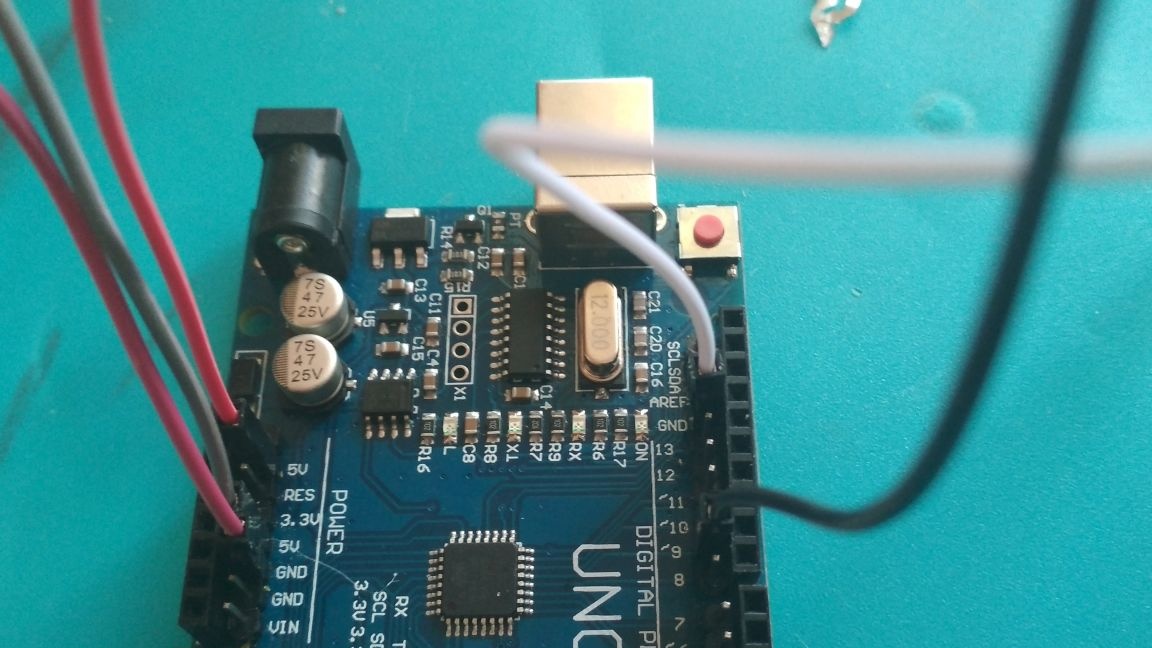
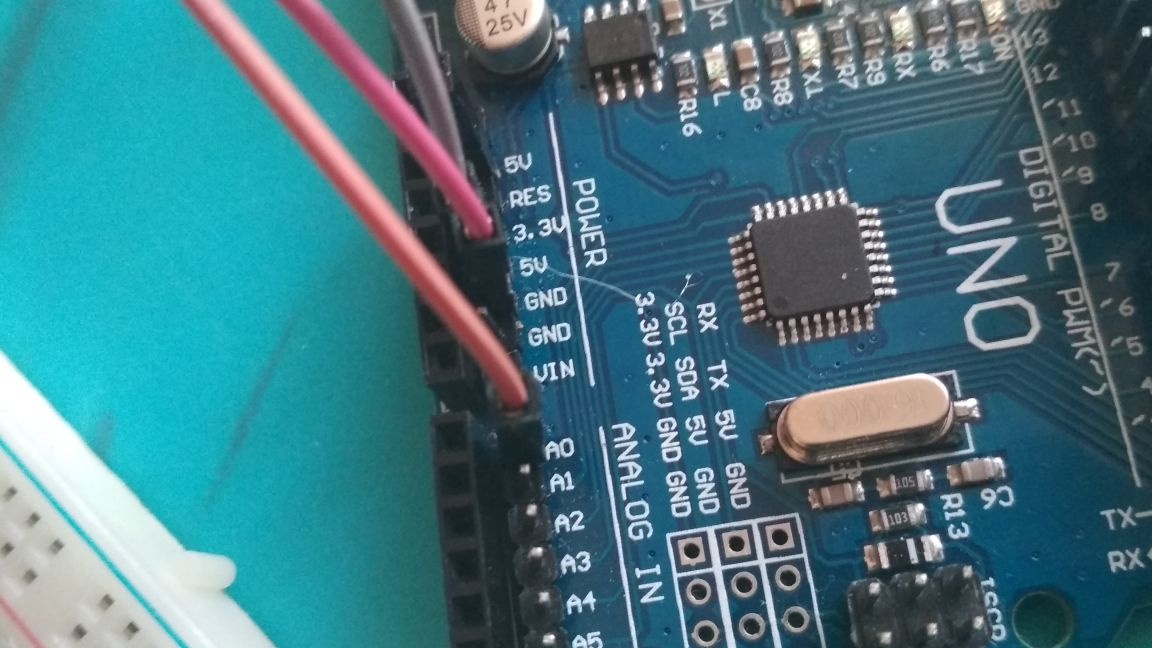
เราใช้ aarduino และเชื่อมต่อเอาท์พุท 5v เข้ากับส่วนเสริมของ breadboard และ Gnd ไปที่เครื่องหมายลบ:

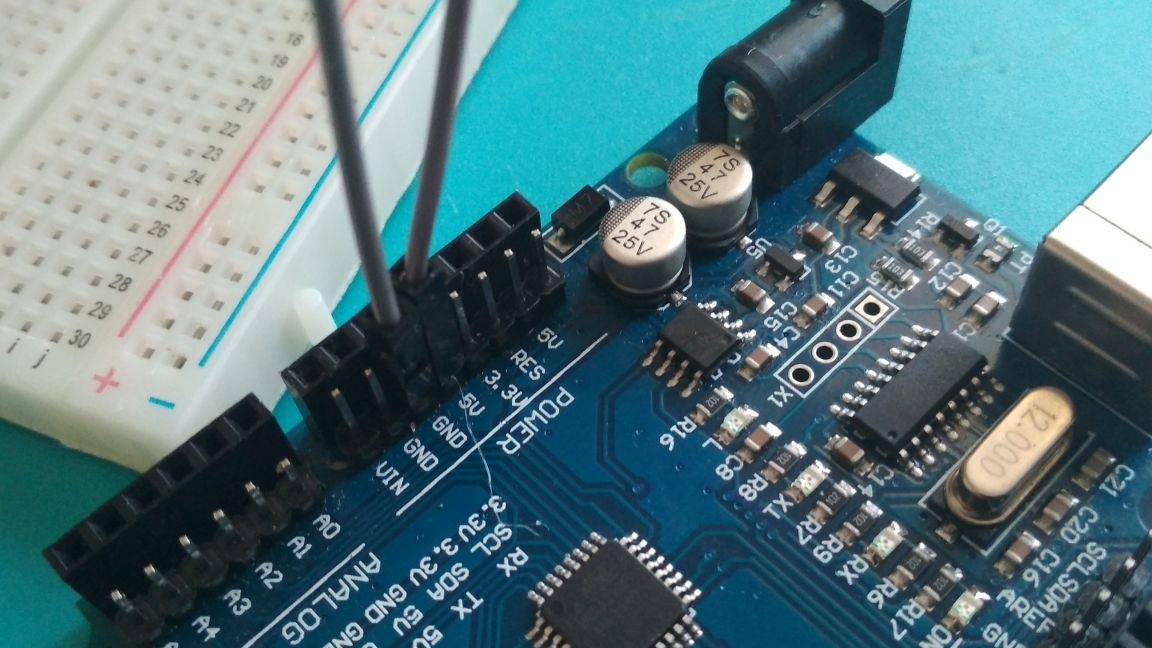
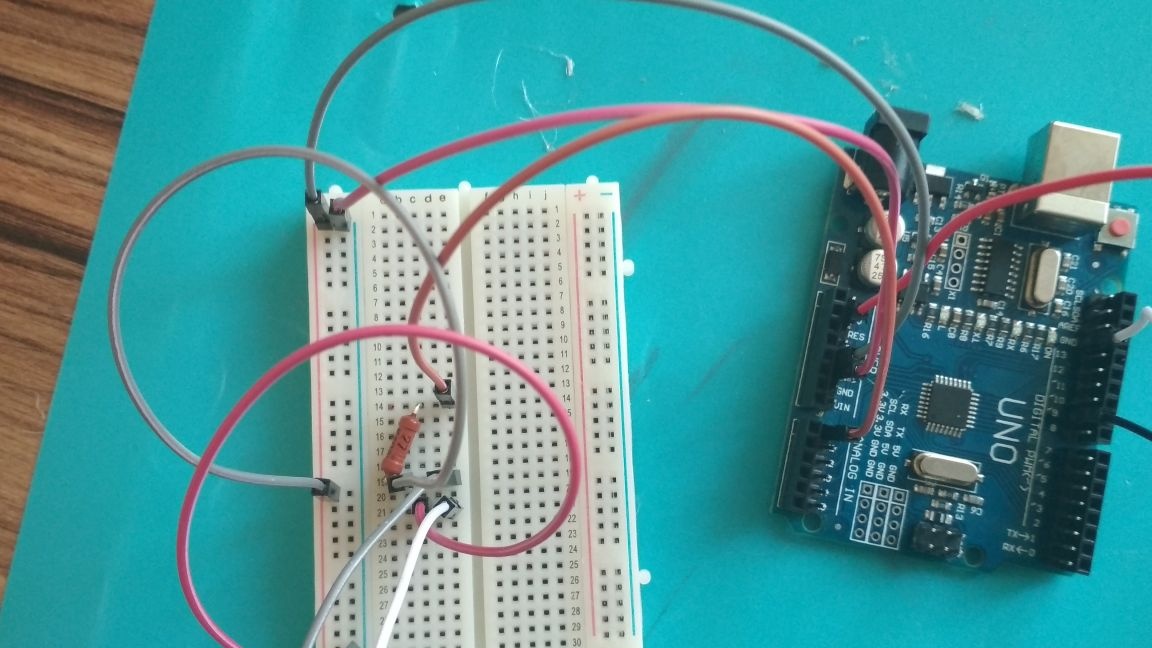
เพิ่มสายเชื่อมต่อเข้ากับเซอร์โวมอเตอร์และเชื่อมต่อกับ arduino ดังต่อไปนี้:
สายสีน้ำตาลถึง gnd
สีแดงถึง 5v
ส้มถึง 9 พิน
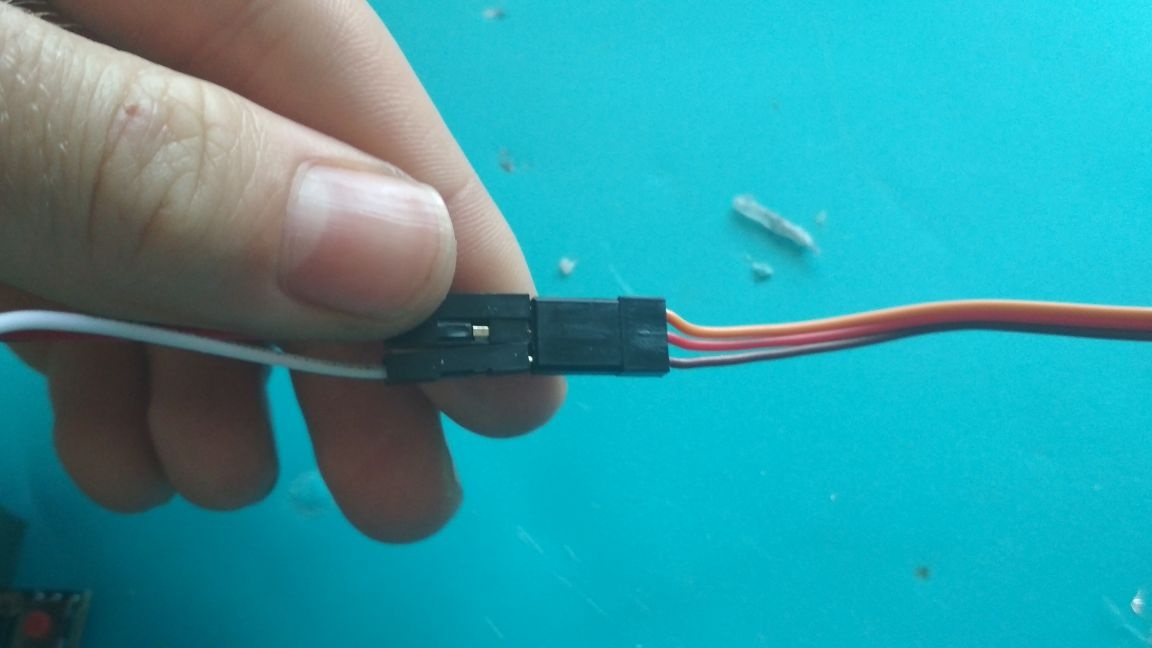
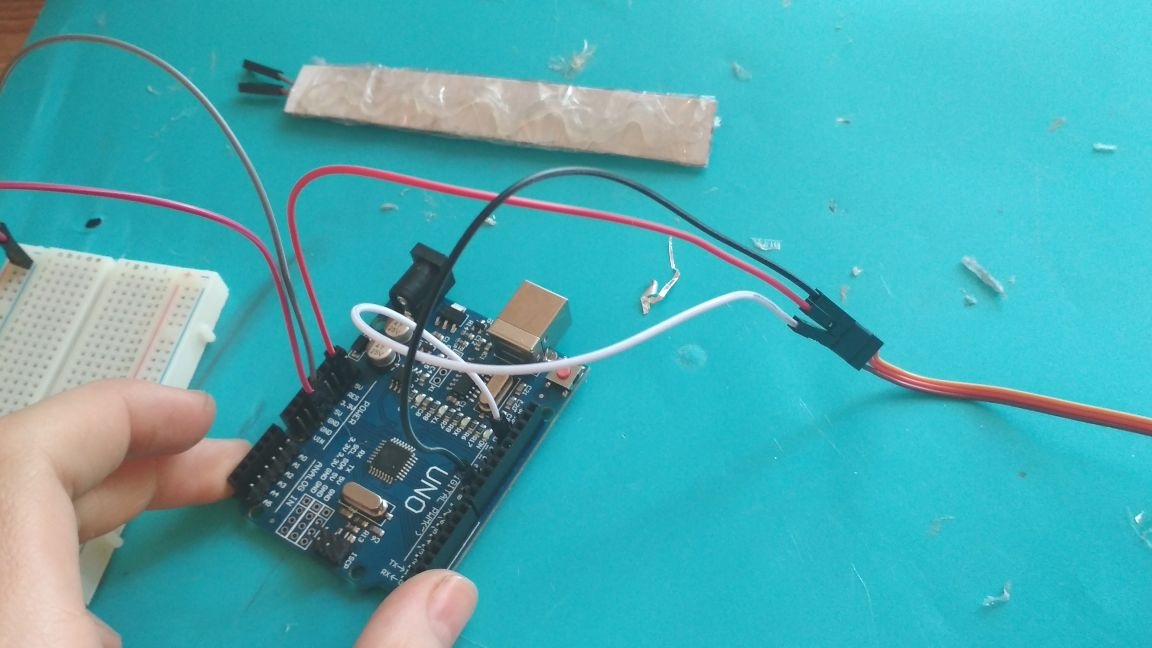
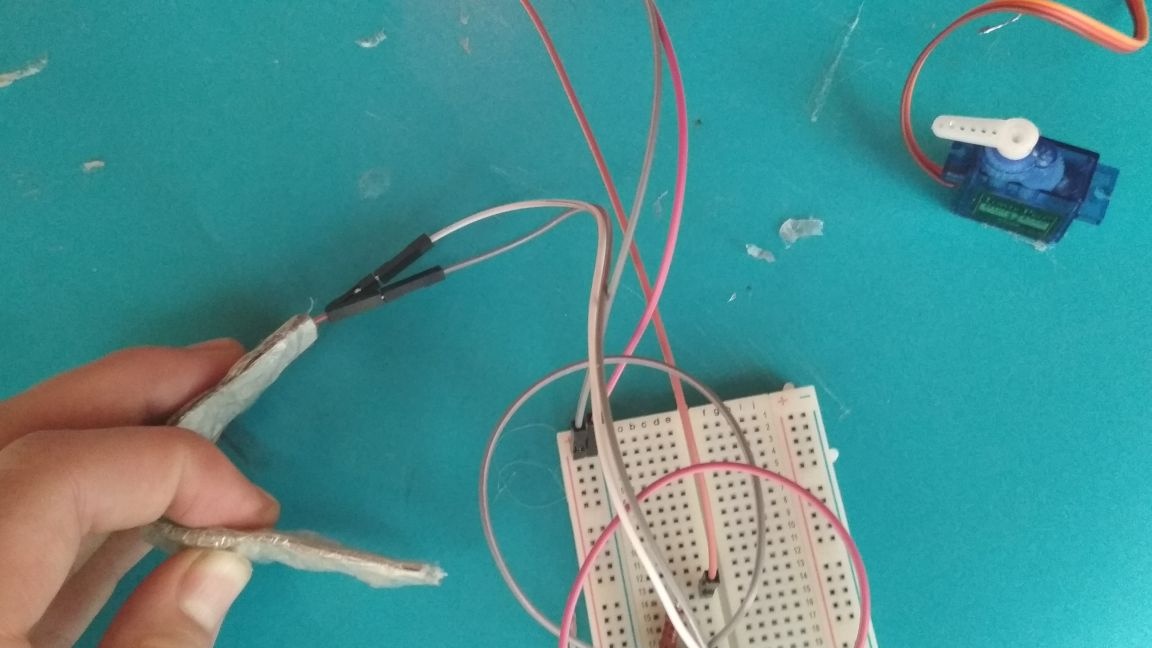
สำหรับเซ็นเซอร์โค้งของเราให้เพิ่มสายพ่อกับสายพ่อสองเส้น

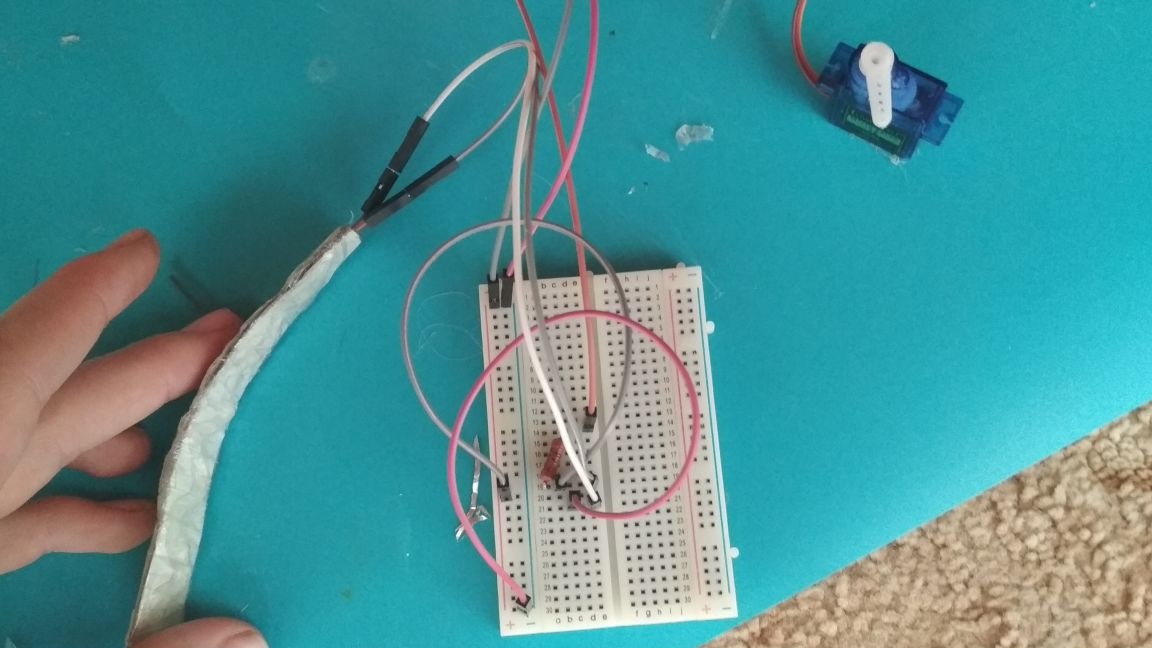
เชื่อมต่อพวกเขาเข้ากับเขียงหั่นขนม:
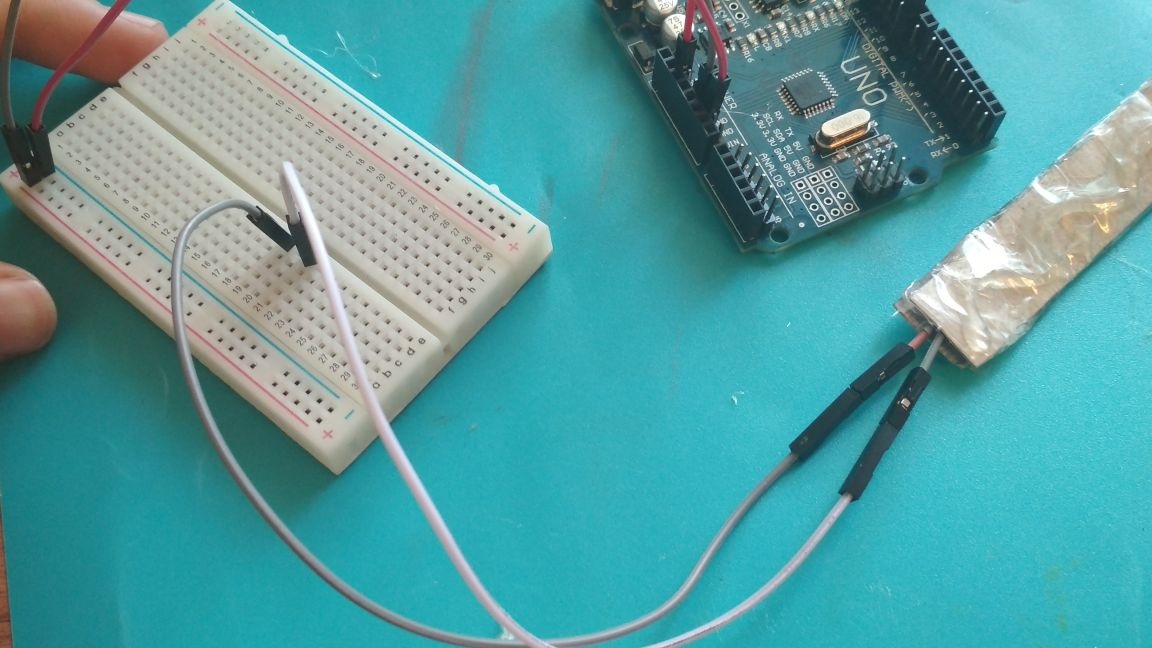
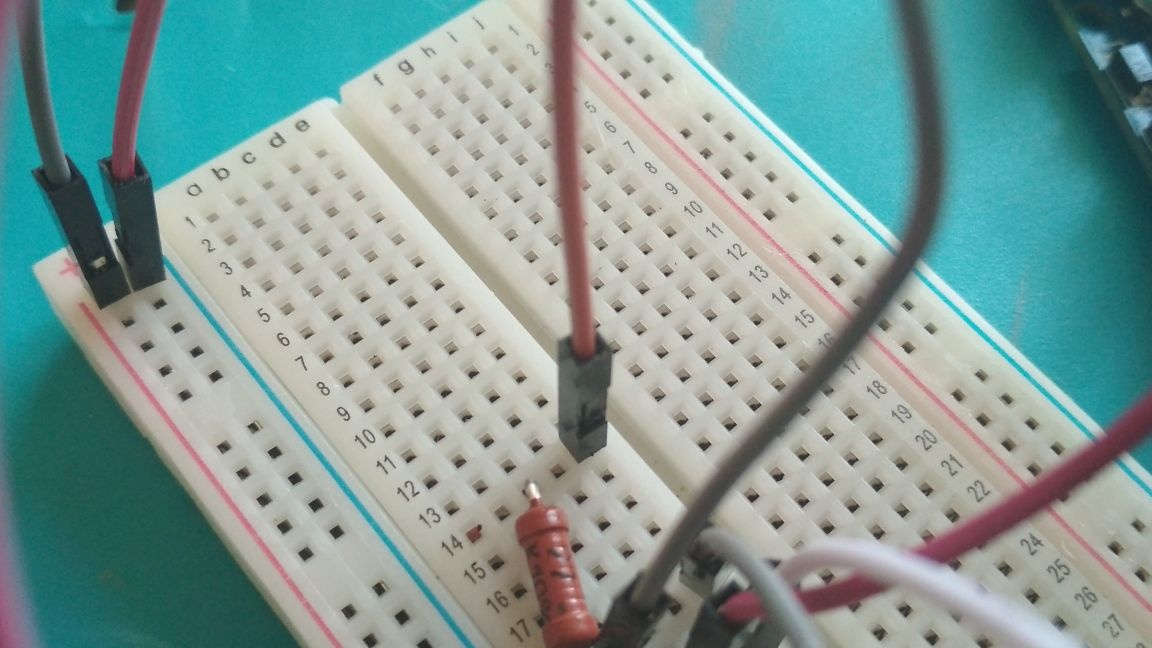
ปลายด้านหนึ่งของเซ็นเซอร์เชื่อมต่อกับส่วนเพิ่มของ breadboard ผ่านตัวต้านทาน 22 กิโลโอห์ม (โชคไม่ดีที่ฉันผสมมันและเชื่อมต่อเข้ากับเอาท์พุทอื่น แต่สิ่งนี้ไม่ตอบสนองต่อการใช้งาน) และอีกอย่างลบ:
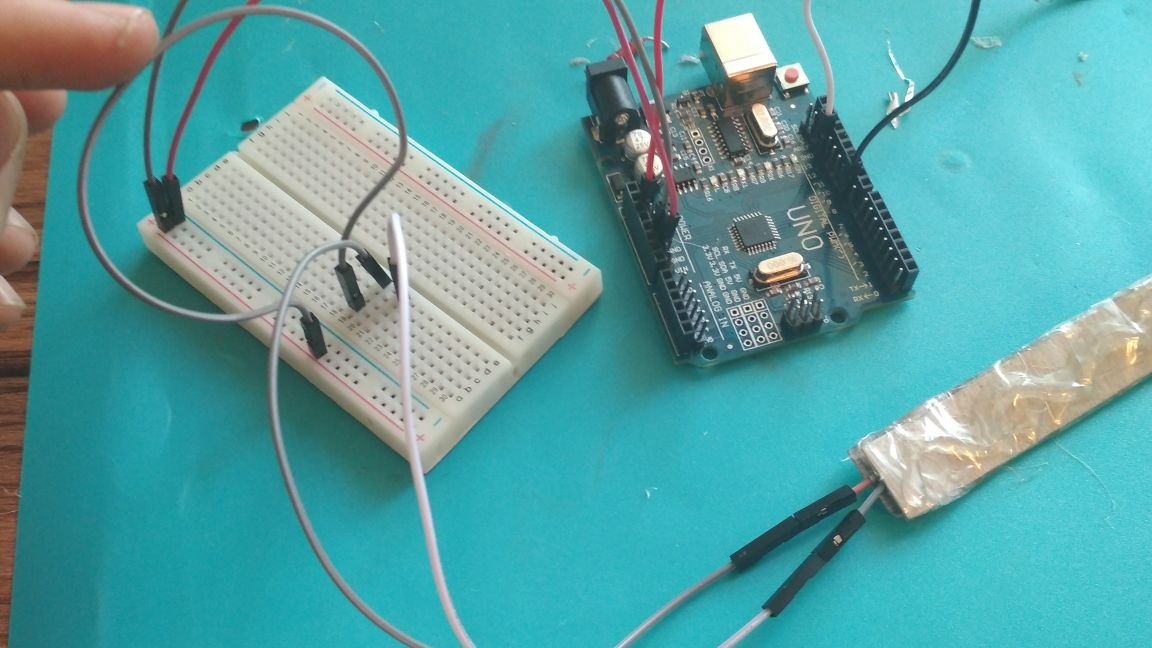
บนบรรทัด breadboard นั้นซึ่งจุดสิ้นสุดของเซ็นเซอร์ที่เชื่อมต่อกับ plus ตั้งอยู่ให้เพิ่มลวดอีกอันแล้วเอาท์พุทไปยังเอาท์พุท A0 บน Arduino:
ตอนนี้เราเชื่อมต่อ Arduino กับคอมพิวเตอร์เริ่มต้น Arduino IDE และโหลดร่างดังต่อไปนี้:
#include
เซอร์โว servo1;
const int flexpin = 0;
การตั้งค่าเป็นโมฆะ ()
{
Serial.begin (9600);
servo1.attach (9);
}
เป็นโมฆะห่วง ()
{
ความยืดหยุ่น
servoposition int;
flexposition = analogRead (flexpin);
servoposition = map (ข้อต่อ 1018, 1023, 0, 90)
servoposition = constrain (servoposition, 0, 90);
servo1.write (servoposition);
Serial.print ("เซ็นเซอร์:");
อนุกรม. พิมพ์ (flexposition);
Serial.print ("servo:");
อนุกรม. println (servoposition);
ล่าช้า (1,000);
}เปิดมอนิเตอร์พอร์ตที่เชื่อมต่อกับ Arduino และโหลดแบบร่าง

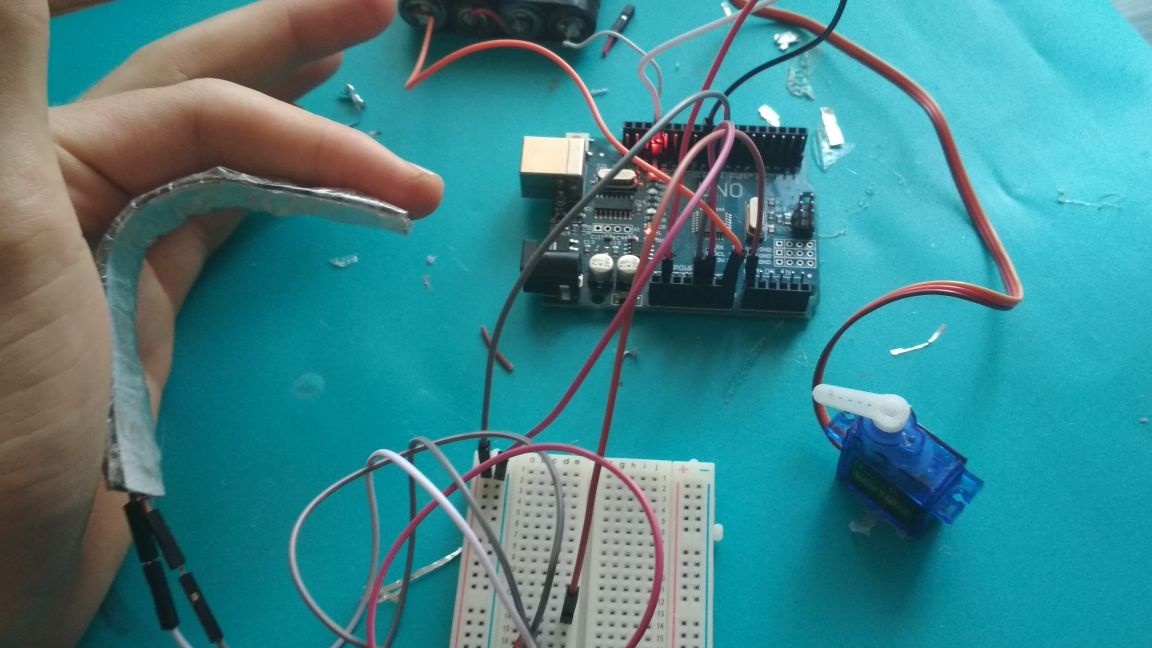
ตอนนี้เราสังเกตการเปลี่ยนแปลงที่เกิดขึ้นในพอร์ตมอนิเตอร์เมื่อเซ็นเซอร์ของเราโค้งงอเราเห็นว่า 1,023 เป็น 90 องศาและ 1020 และ 1019 เป็น 0 ดังนั้นในกรณีของฉันฉันเปลี่ยนหมายเลข 1018 ในร่างเป็น 1020 คุณสามารถมีอันอื่นได้ ตอนนี้ 1,020 คือ 0 องศาและ 1,023 เป็น 90 องศา หลังจากการเปลี่ยนแปลงทั้งหมดแล้วให้อัปโหลดภาพร่างที่กำหนดเองใหม่ไปยังบอร์ด Arduino


นั่นมัน! เซ็นเซอร์ดัดงอที่ง่ายและสำคัญที่สุดของเราพร้อมแล้ว!
หากทุกอย่างทำอย่างถูกต้องเมื่อเซ็นเซอร์ถูกงอไดรฟ์เซอร์โวจะหมุนได้ 90 องศาและเมื่อยืดออกแล้วจะกลับสู่ตำแหน่งเดิม แน่นอนว่าความแม่นยำของเซ็นเซอร์นี้ด้อยกว่าเซ็นเซอร์ที่ซื้อมา แต่มันเหมาะสำหรับโครงการที่ไม่สับสนโดยเฉพาะและนอกจากนี้หากคุณทำทุกอย่างด้วยความระมัดระวังและปรับแต่งอย่างละเอียดก็จะเปิดออกเกือบจะเหมือนที่ซื้อมา ฉันหวังว่าบทความนี้มีประโยชน์กับใครบางคน
ขอบคุณสำหรับความสนใจของคุณ!