


ฉันได้มีส่วนร่วมในการออกแบบของฉันจากคำแนะนำการประกอบสำหรับ Lego Technic 42029 ส่วนที่เหลือคือการปรับตัวของฉัน ดังนั้นเราต้องการ:
- เลโก้เทคนิค 42029
- Arduino Nano 382P
- DRV 8833 (ดีกว่า Populus แต่คุณสามารถมีภาษาจีนได้ด้วย)
- ไดรฟ์เซอร์โว 2 ตัว SG-90
- ตัวรับสัญญาณ IR
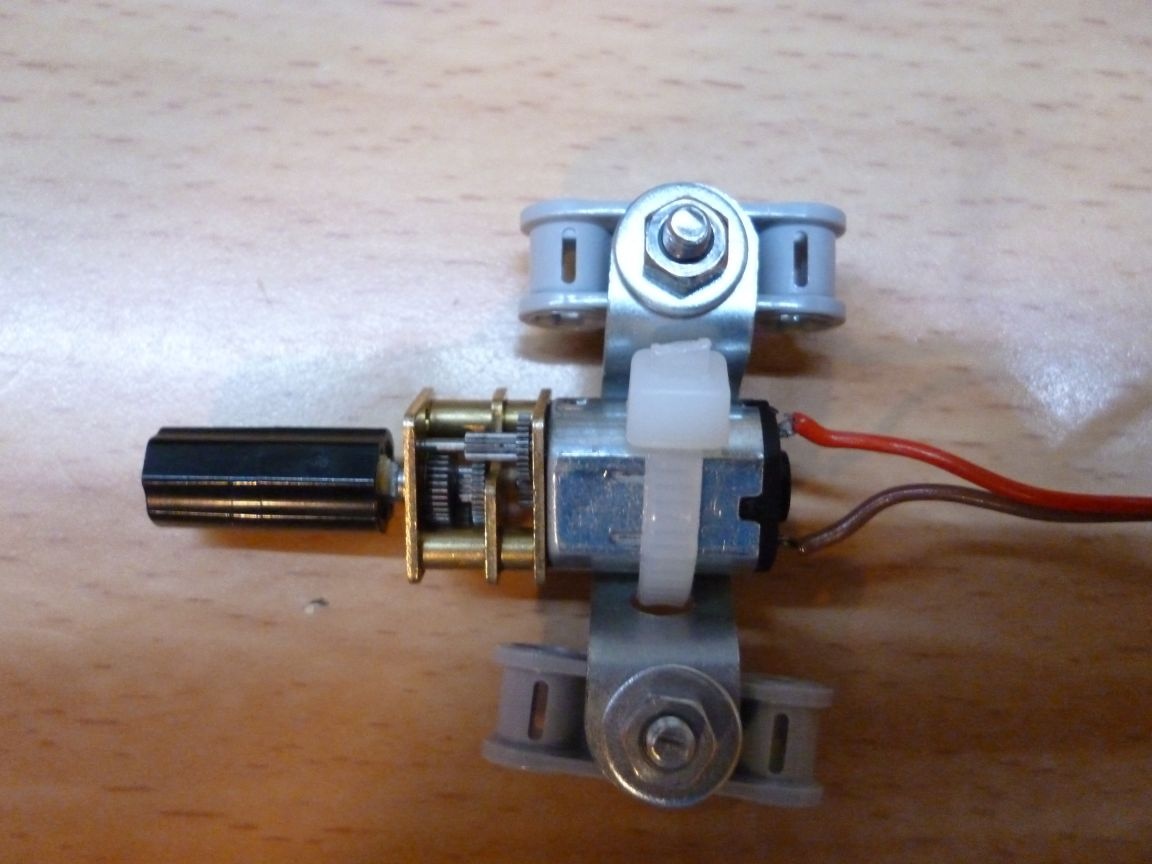
- มอเตอร์เกียร์ 200 รอบต่อนาที
- LED 2 ดวง
- ตัวต้านทาน 2 ตัว 150 โอห์ม
- ตัวเก็บประจุ 10v 1000uF
- หวีเดี่ยว 2 แถว PLS-40
- 2 ขั้วต่อ PBS-20
- ตัวเหนี่ยวนำ 68mkGn
- แบตเตอรี่ NI-Mn 1.2v 1,000mA จำนวน 6 ก้อน
- เชื่อมต่อพ่อแม่สองขากับสาย
- Homutik
- สายไฟที่มีสีต่างกัน
- ประสาน
- ขัดสน
- มีดเครื่องเขียน
- หัวแร้ง
- สลักเกลียว 3x40 และถั่วและแหวนสำหรับพวกเขา
- สลักเกลียว 3x60
- แบตเตอรี่ Ni-Mn 1.2v 1,000mA 6 ชิ้น
ขั้นตอนที่ 1 เรารวบรวมด้านหลังของช่วงล่าง
ก่อนอื่นคุณต้องประกอบด้านหลังของช่วงล่างตามคำแนะนำของ Lego 42029 ตอนที่ 1 โดยเริ่มจาก 3 หน้าและ 8 ตัว ถัดไปเพิ่มรายละเอียดเล็กน้อยเพื่อให้คุณสามารถติดตั้งเครื่องยนต์และเกียร์

ช่วงล่างหน้า 2
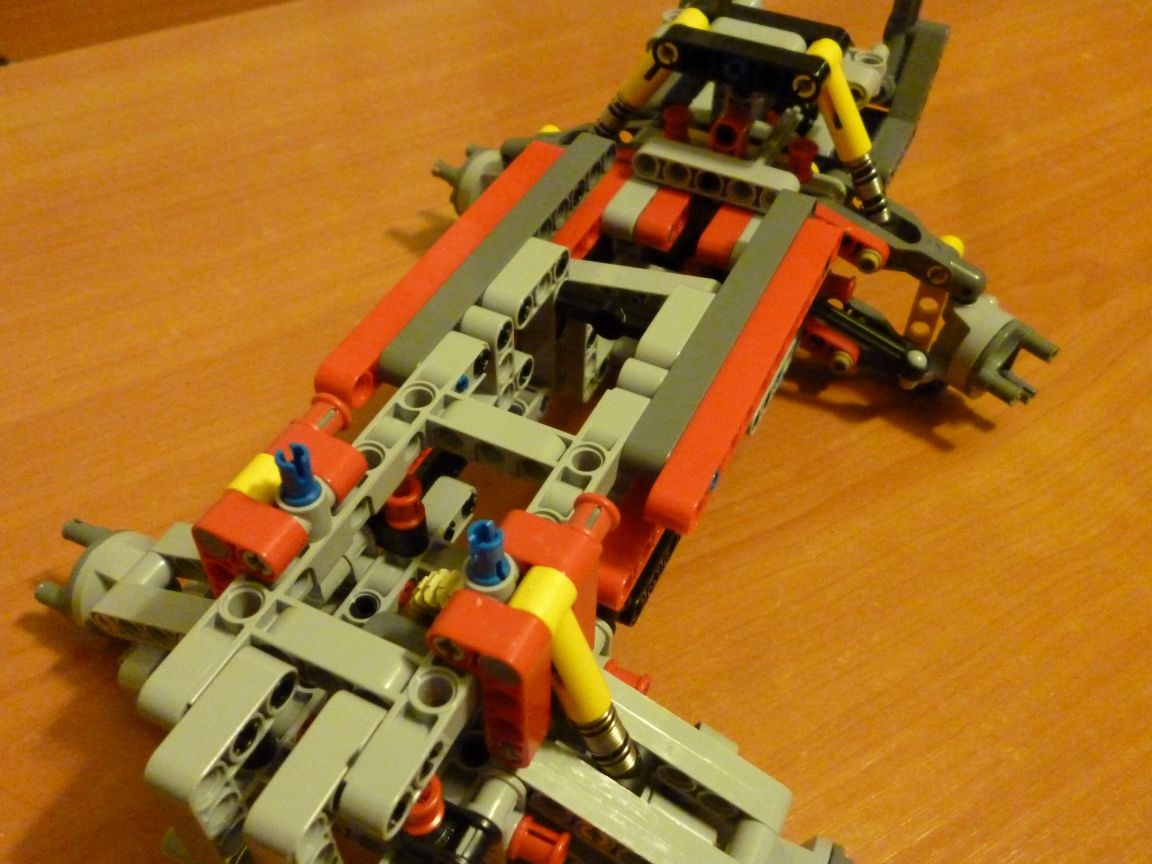
เราประกอบส่วนหน้าของช่วงล่างตามคำแนะนำของเลโก้ 42029 ตอนที่ 1 จากหน้า 21 ถึง 23 เรานำรูปสี่เหลี่ยมคางหมูจากส่วนที่สองของคำแนะนำเลโก้จากหน้า 6 ถึง 11 เราประกอบกว้านจากส่วนที่สองของหน้า 14 - 22 และส่วนกันชนที่สองคือ 34 -36 หน้า

ขั้นตอนที่ 3 ประกอบแชสซี
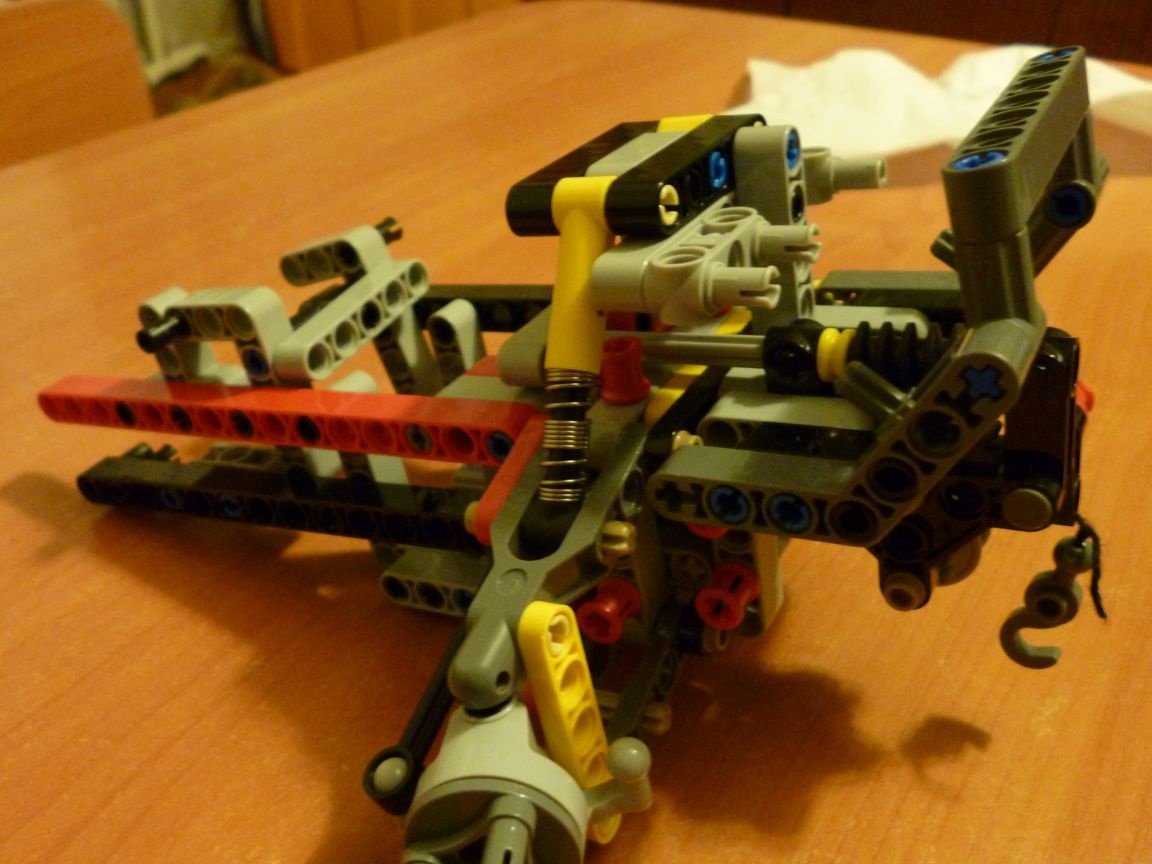
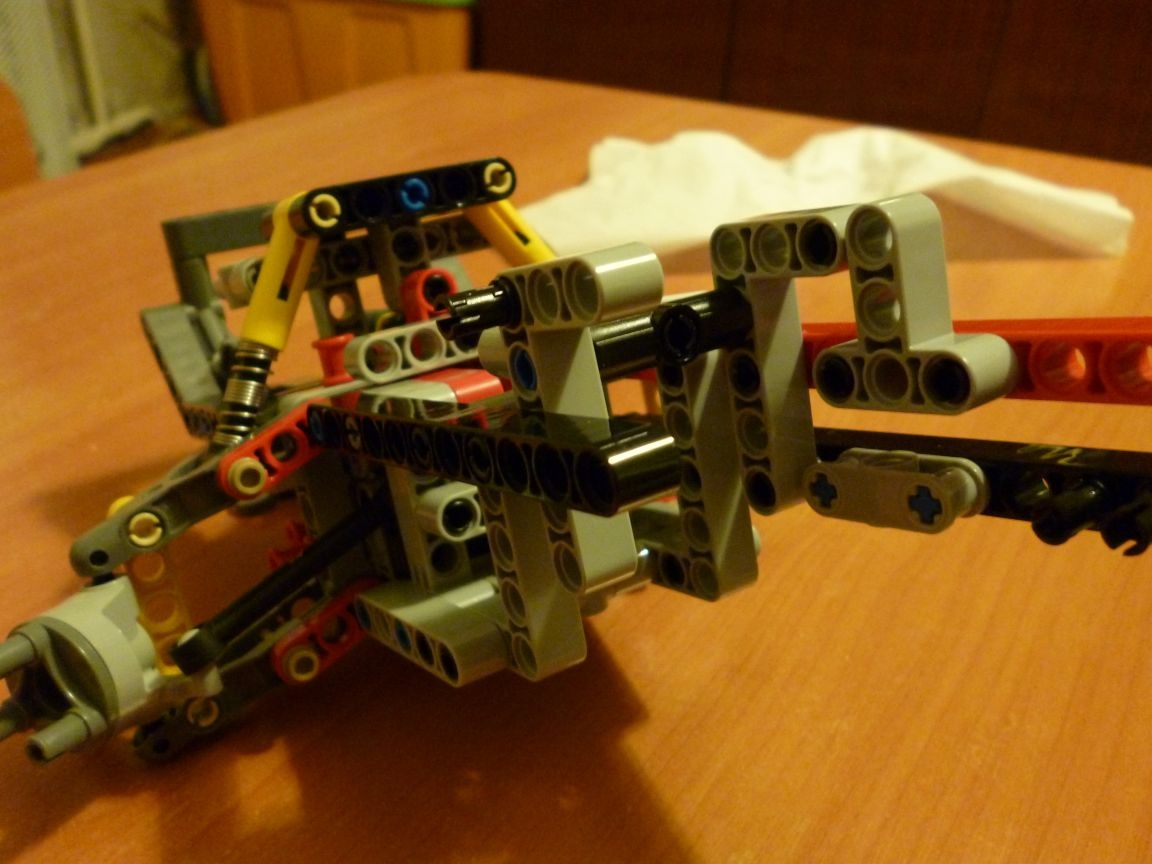
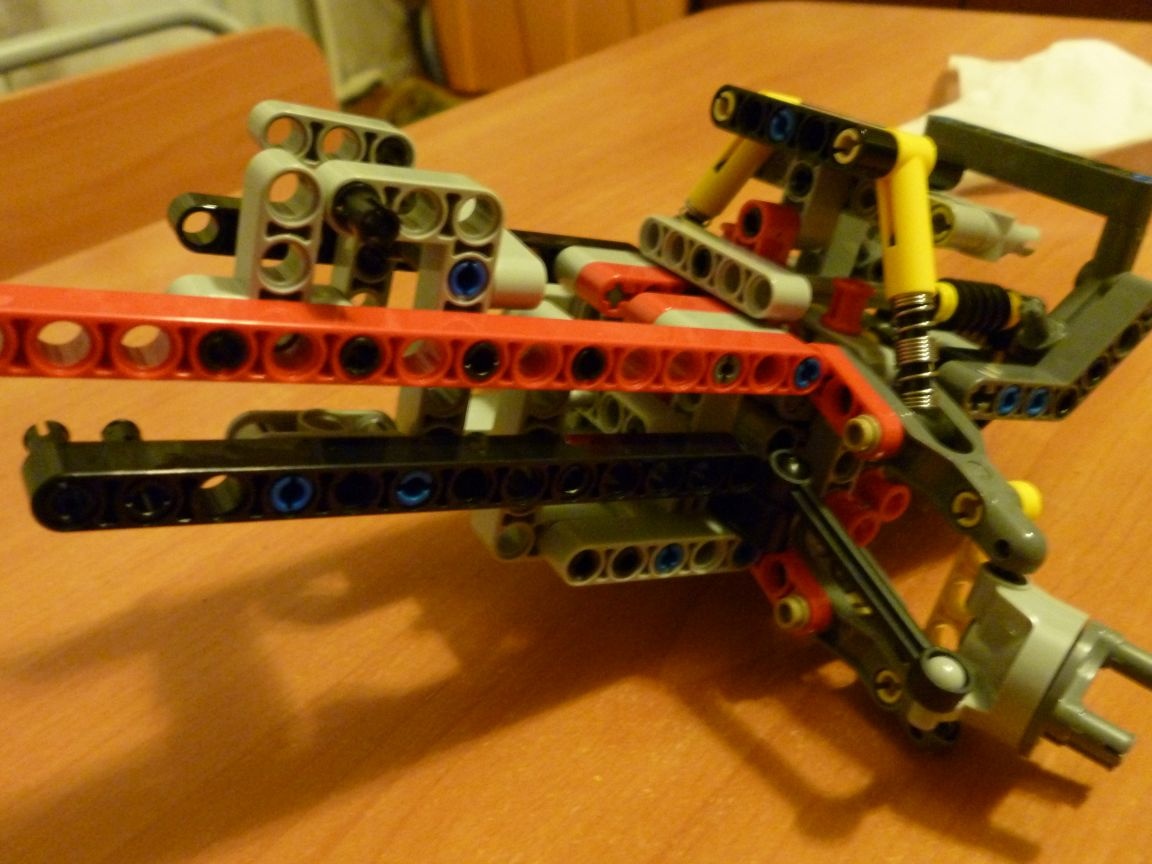
เราเชื่อมต่อทั้งสองส่วนดังแสดงในภาพ:

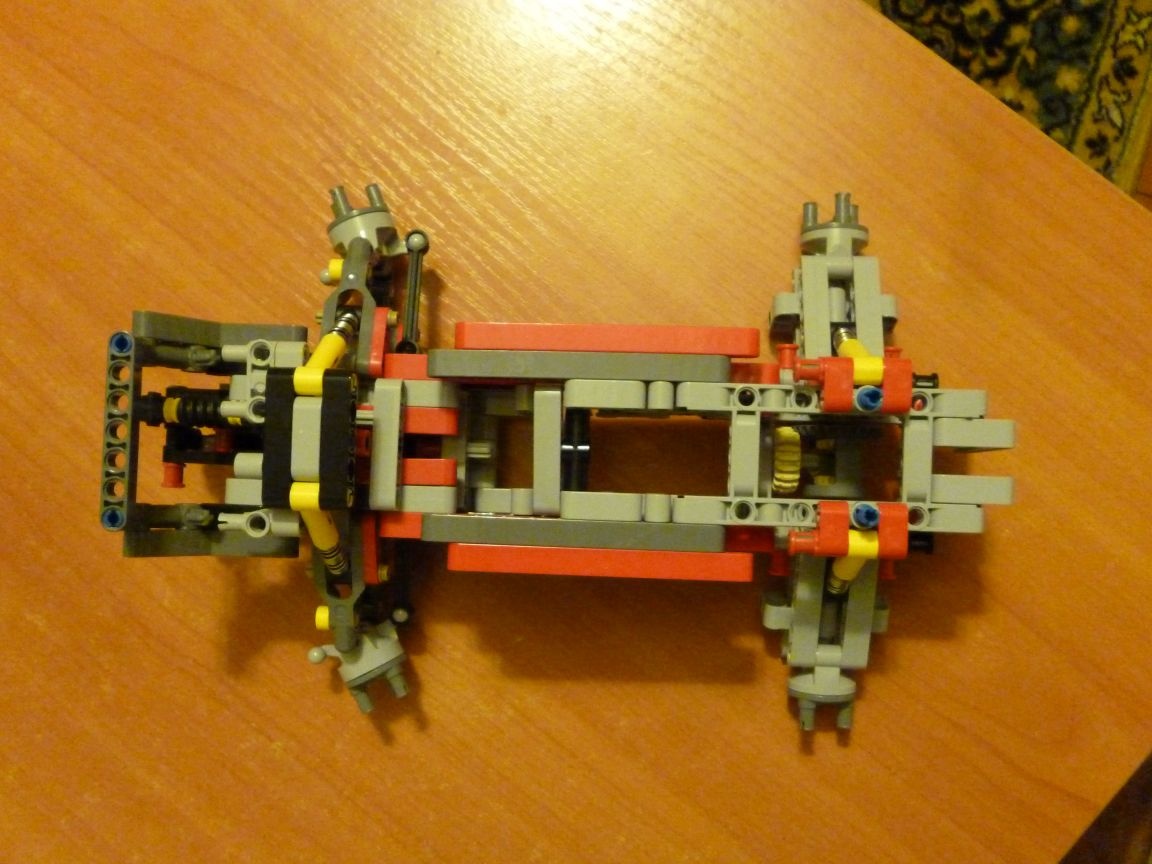
ฉันแก้ไขปัญหาในการเชื่อมต่อชุดเกียร์กับชิ้นส่วนของผู้ออกแบบดังนี้: วางแกนของชุดเกียร์ที่เชื่อมต่อและใส่เศษของการแข่งขันเพื่อแก้ไข สำหรับการติดตั้งมอเตอร์เกียร์ใช้พลาสติกโลหะจากนักออกแบบเหล็กและที่หนีบ
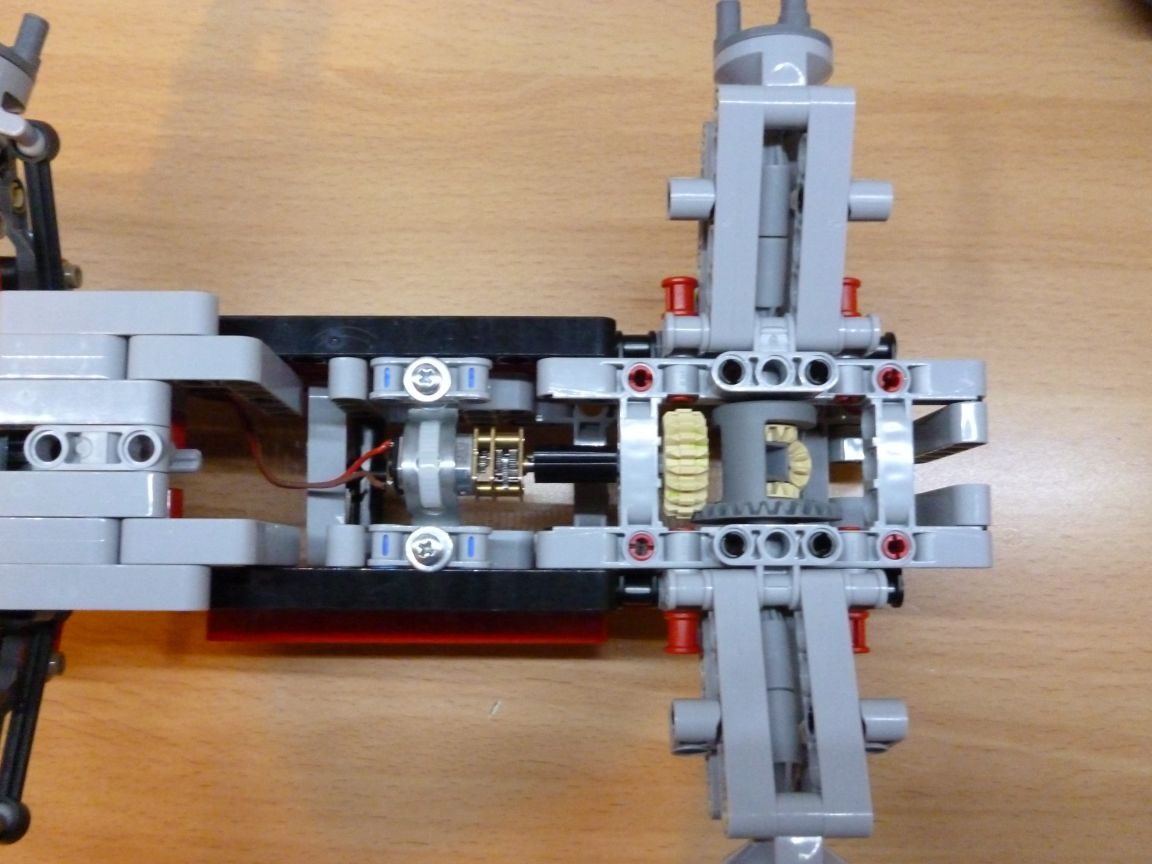
มันเปิดออกดังต่อไปนี้:
ติดตั้งบนตัวเครื่อง:
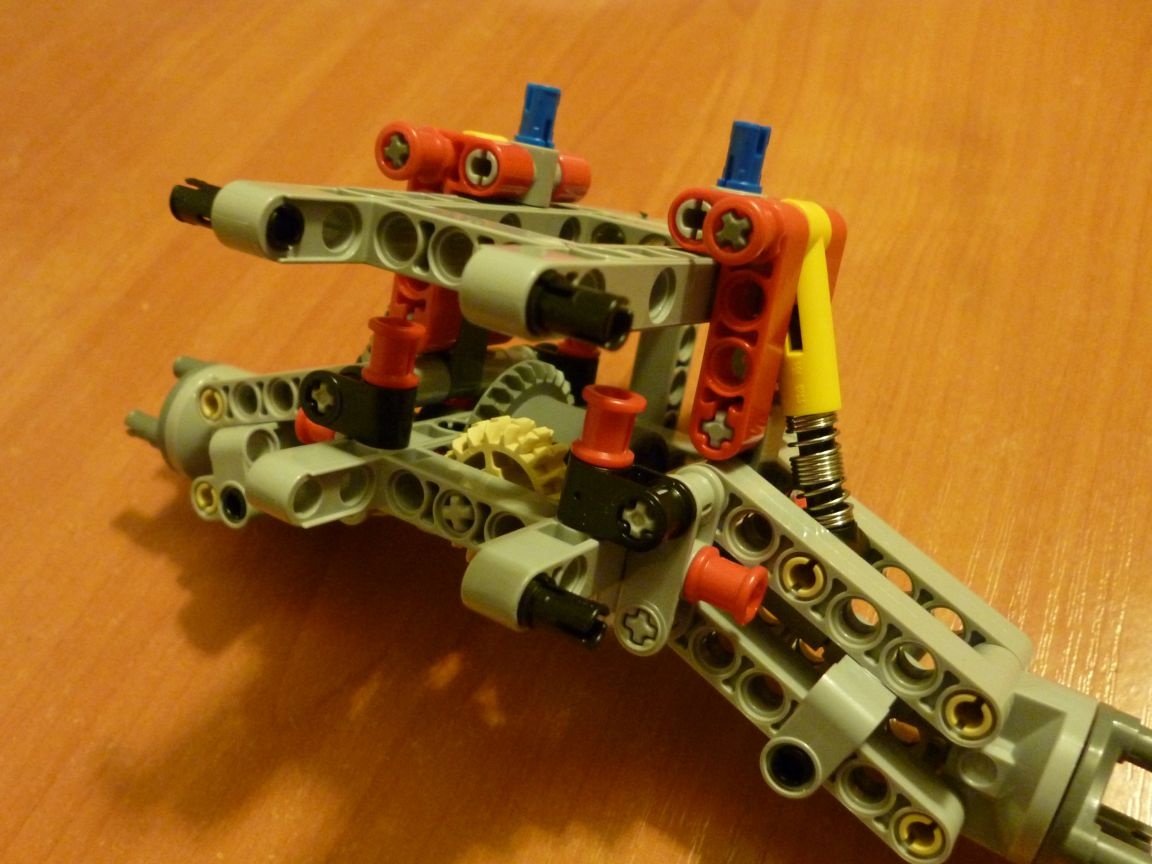
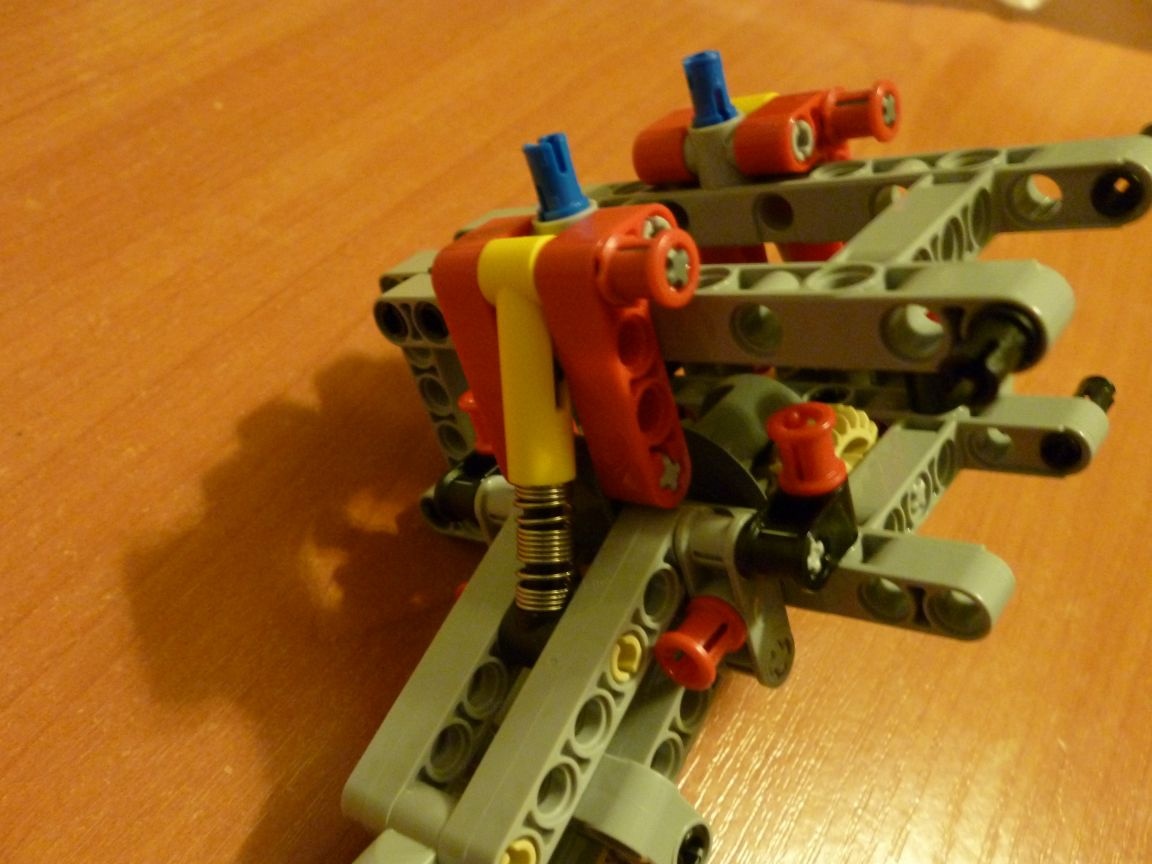
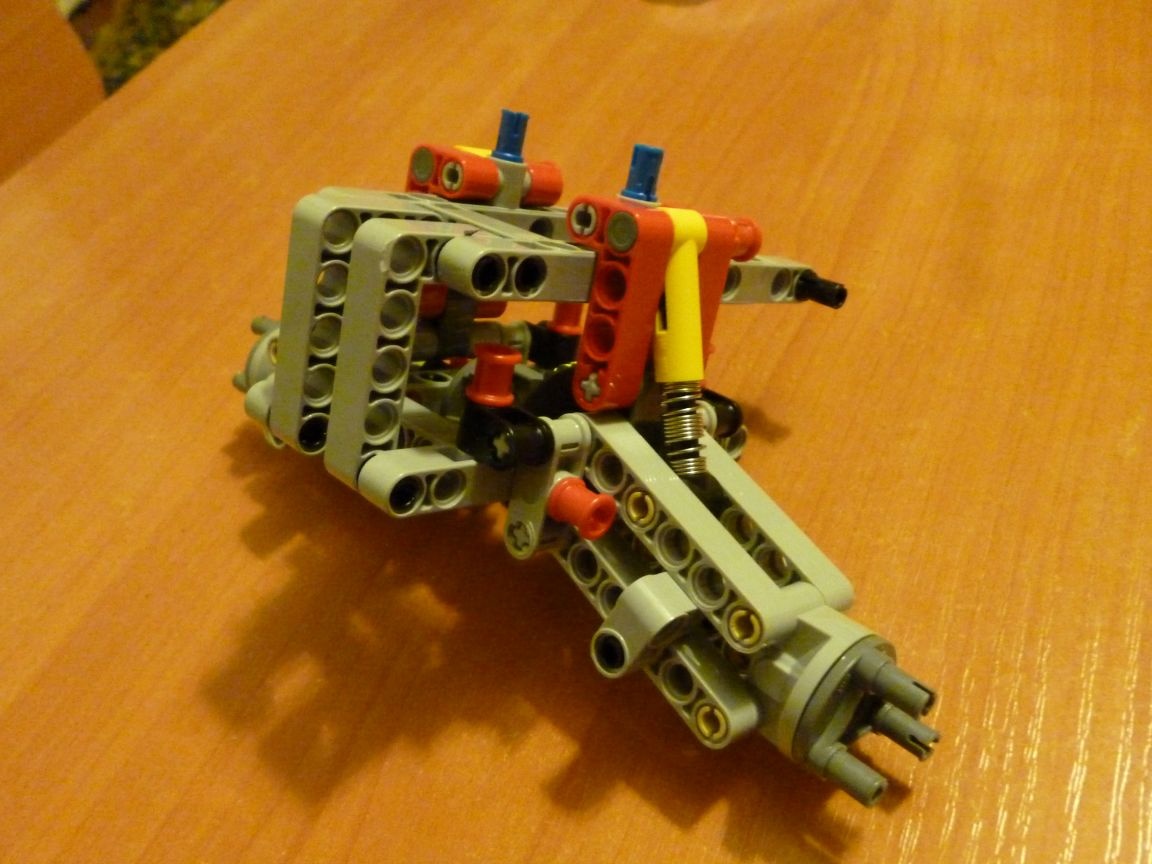
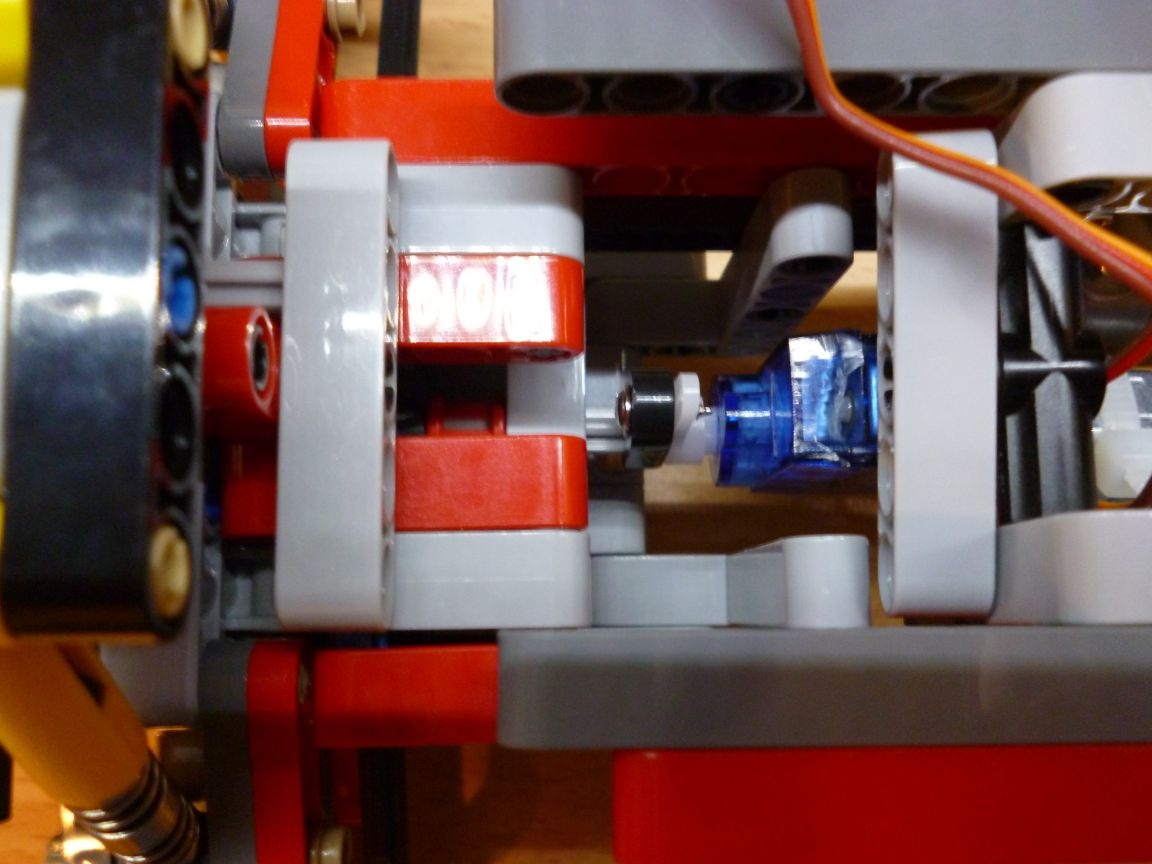
เพื่อดำเนินการหมุนเอาเซอร์โว SG-90 มันเป็นสิ่งจำเป็นที่จะต้องเจาะอย่างระมัดระวังเพื่อที่จะไม่สัมผัสชิ้นส่วนภายในผ่านรูที่มีขนาดเส้นผ่าศูนย์กลาง 3.2 มม. หรือเพียงแค่ตัดด้วยมีดเครื่องเขียน และยังตัดส่วนที่ยื่นออกมา (“ ปีก” เพื่อทำการยึด) เราใส่สลักเกลียวลงในรูที่ทำและยึดด้วยน็อต บนเพลาของเซอร์โวเราวางคันโยกที่มีชิ้นส่วนที่เมาจากเลโก้:
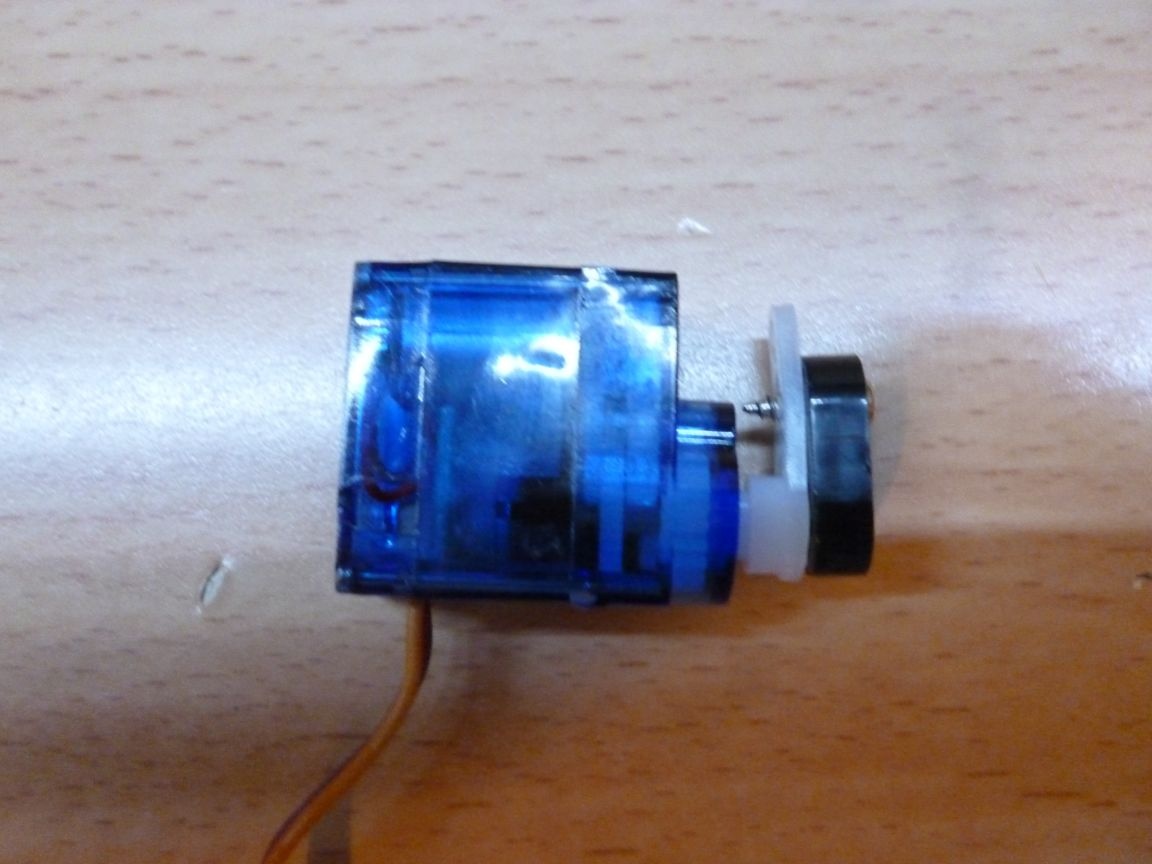
ตั้ง:
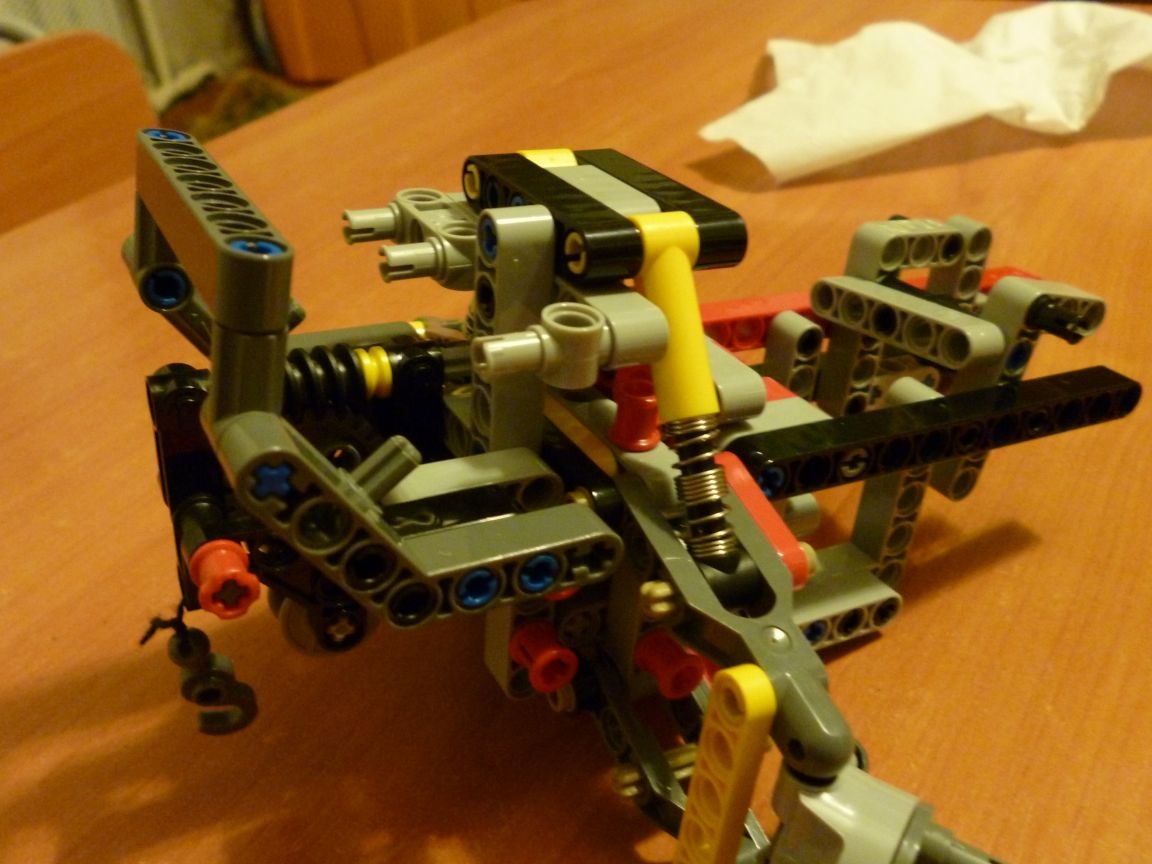
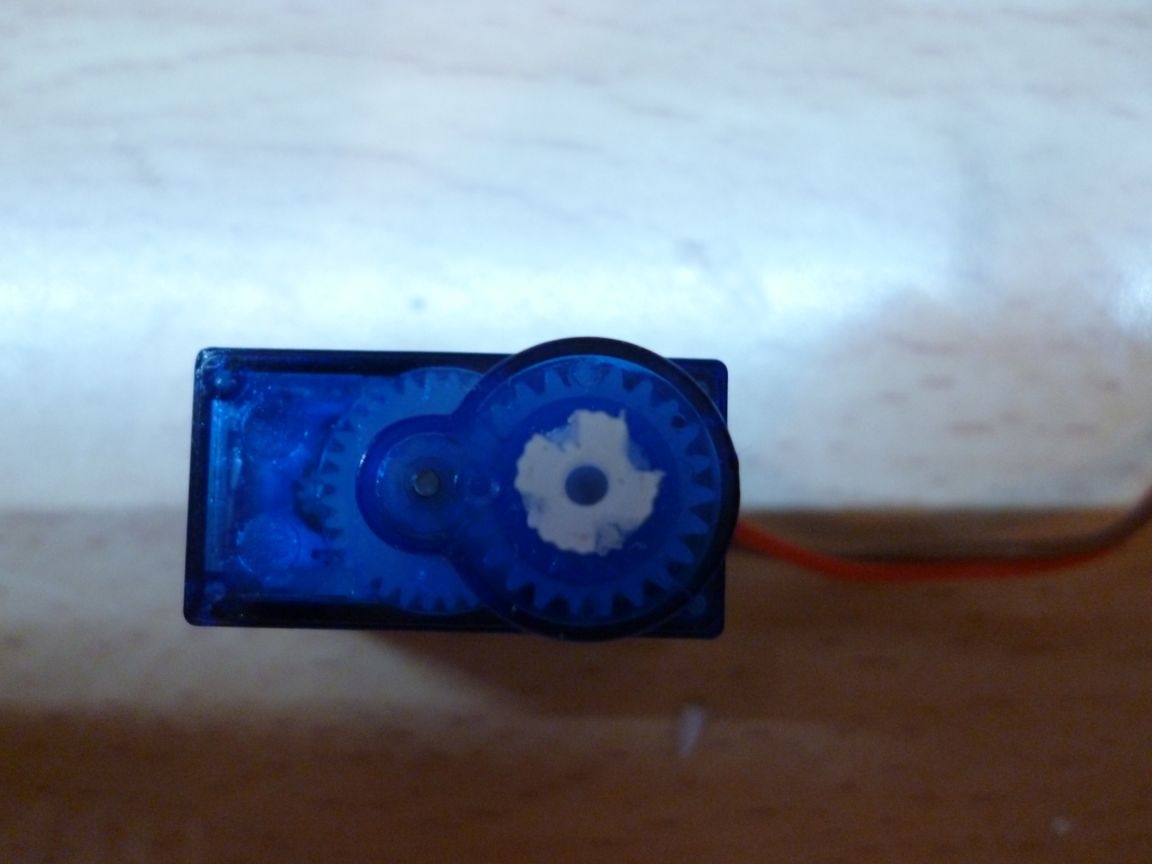
เราจะใช้เซอร์โวตัวที่สองสำหรับเครื่องกว้าน เราทำเช่นเดียวกับครั้งแรก และตอนนี้มันจะต้องมีความทันสมัยเพื่อให้มันหมุนได้อย่างอิสระ ในการทำเช่นนี้เราได้ถอดไดรฟ์เซอร์โวออกจากบอร์ดและบัดกรีสายไฟเข้ากับมอเตอร์โดยตรง เรานำอุปกรณ์หลักออกและตัดการเดินทางของมันออกและในที่สุดเราก็สร้างช่องด้วยมีดเสมียนบนเฟืองหลักดังรูป:
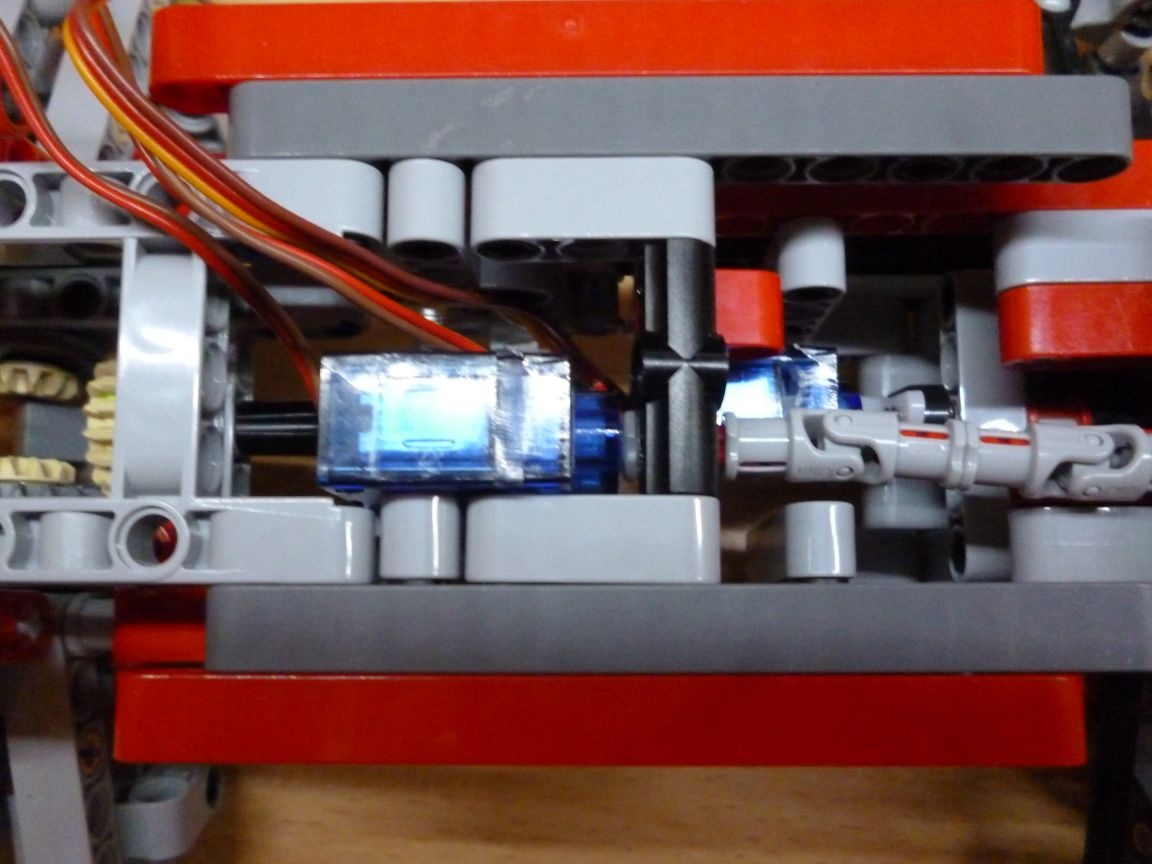
เราเชื่อมต่อกับเครื่องกว้านของเราและใส่ตัวถัง:

ขั้นตอนที่ 4 การจัดการคอนโทรลเลอร์
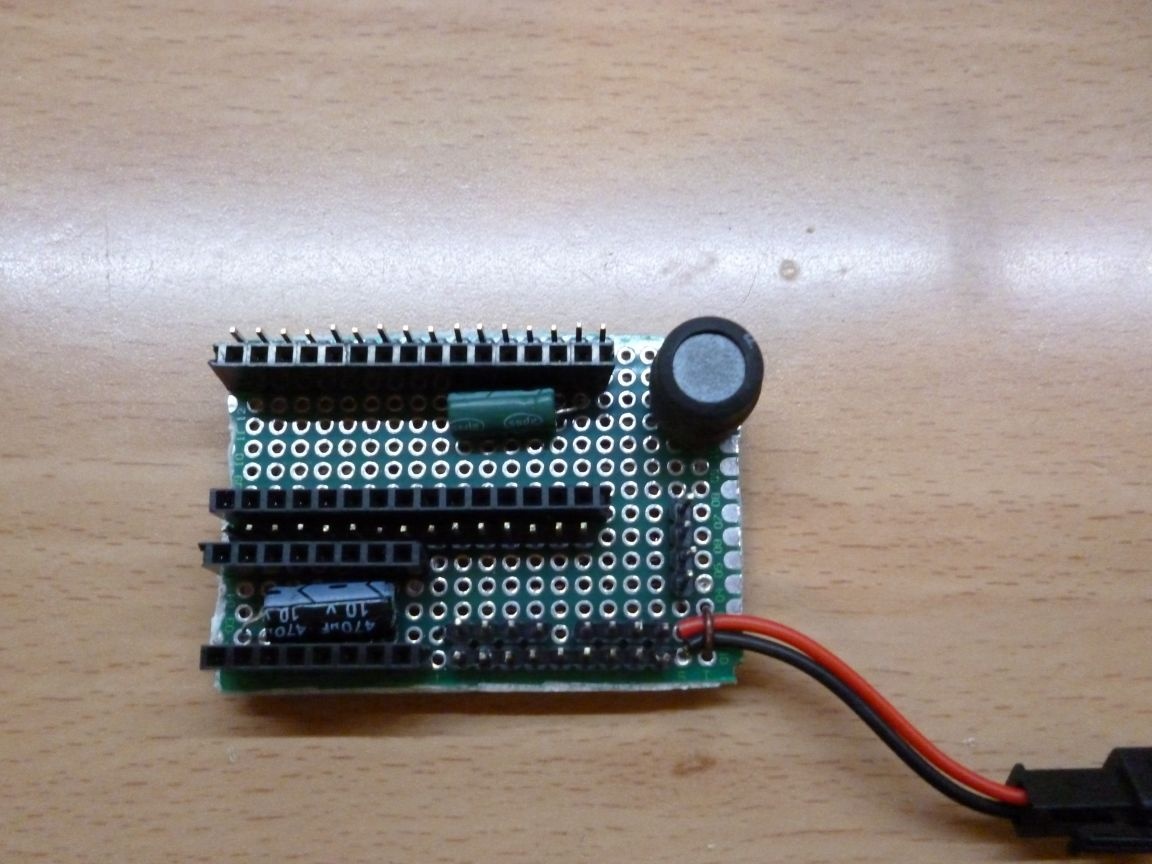
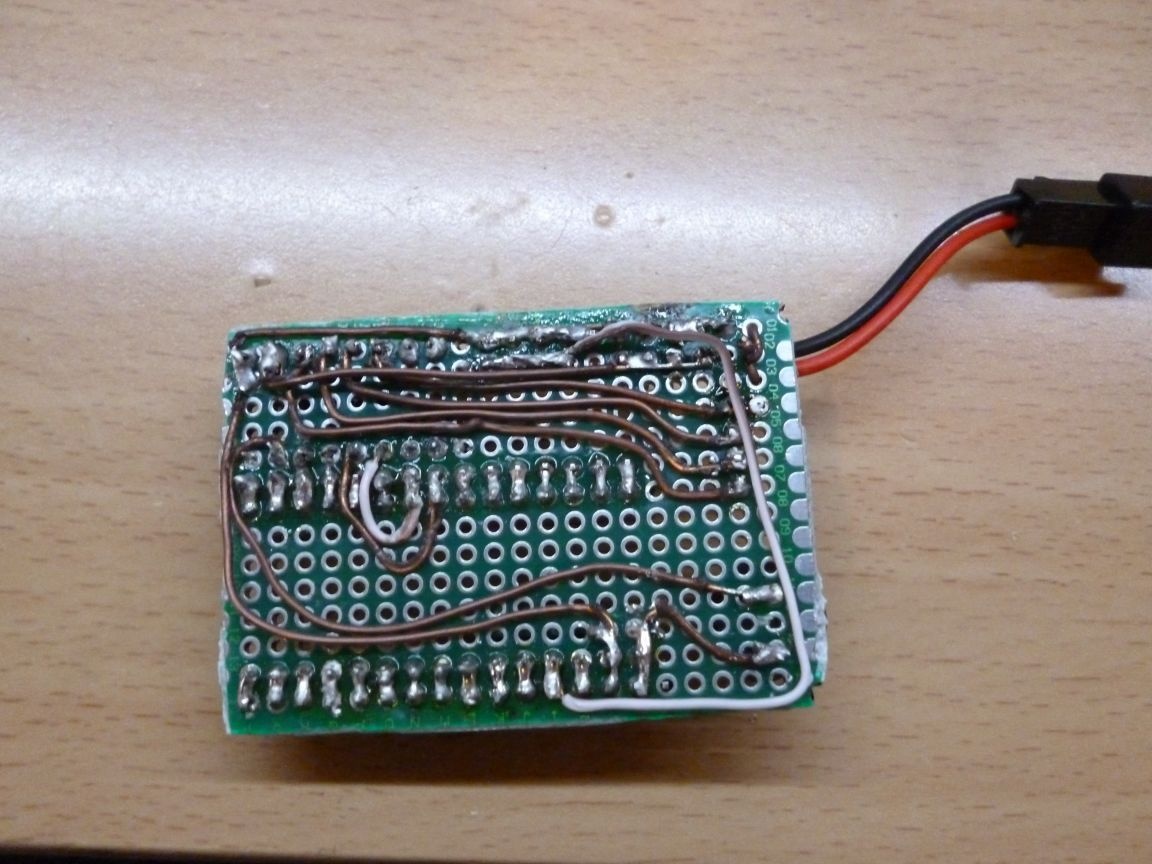
สำหรับการควบคุมเราจะใช้ Arduino และตัวรับสัญญาณ IR เราใช้หัวแร้งและประกอบต่อไปนี้บนแผงวงจร:
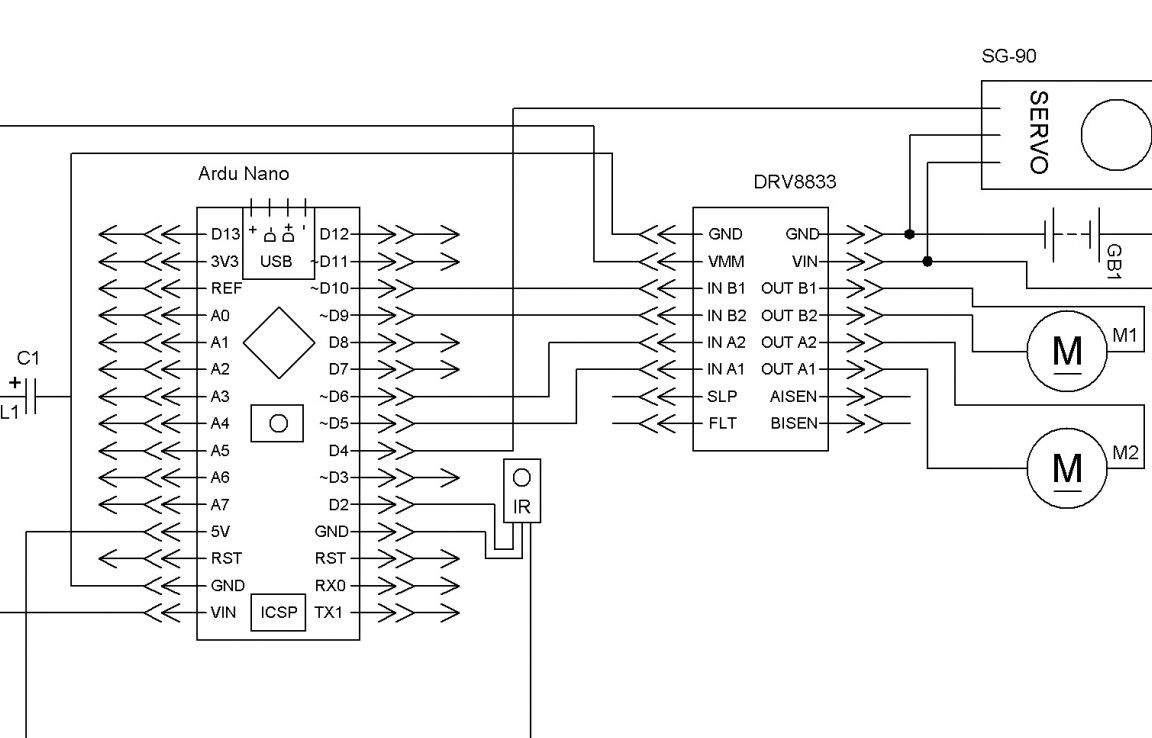
ฉันอธิบาย: ตัวเก็บประจุพลังงานต่ำใด ๆ ขดลวดตัวเหนี่ยวนำที่คุณจะพบคุณจำเป็นต้องควบคุมแรงดันไฟฟ้าของไมโครคอนโทรลเลอร์ ตัวต้านทานถูกเลือกสำหรับ LED ที่ใช้ ตัวรับสัญญาณ IR หรือ TSOP สามารถนำมาจากของเล่นเก่าหรือซื้อได้ที่ร้านขายวิทยุ หากมีสัญญาณรบกวนที่แข็งแกร่งเพิ่มตัวเก็บประจุไปยังวงจรพลังงานตัวรับสัญญาณ IR
เป็นผลให้เราได้รับ:
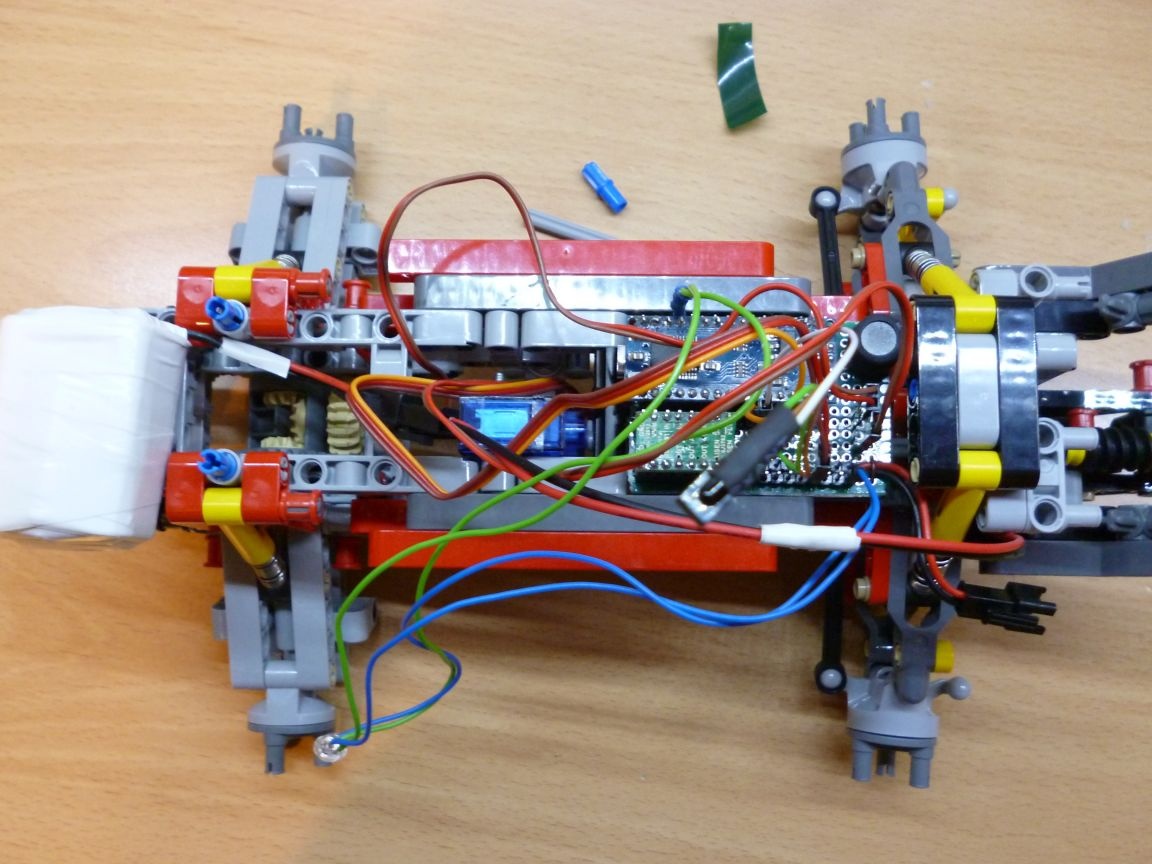
เราติดตั้ง Arduino Nano และ DRV 8833 ในสถานที่:
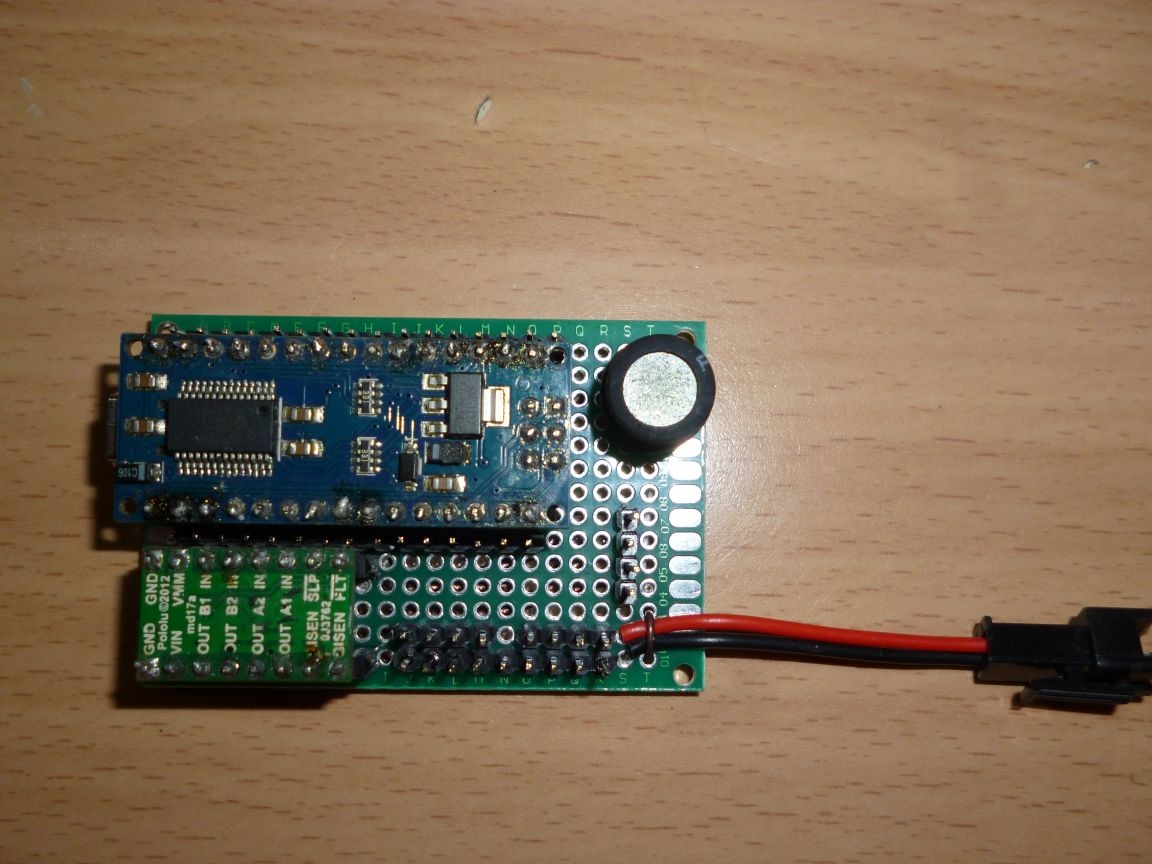
และวางบอร์ดบนแชสซี:
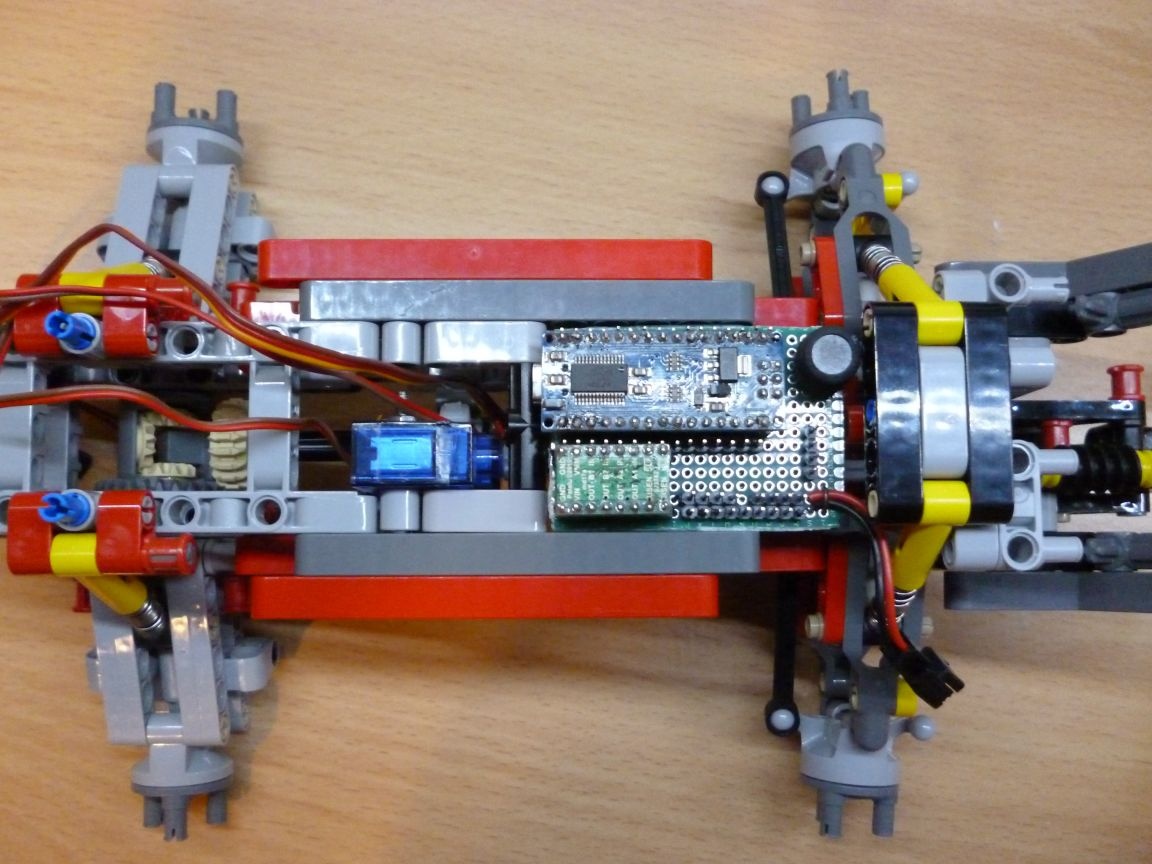
แหล่งจ่ายไฟ - แบตเตอรี่ Ni-Mn 1.2v 1000mA จำนวน 6 ก้อน มันเป็นสิ่งจำเป็นที่จะประสานพวกเขาในซีรีส์และม้วนด้วยเทปไฟฟ้า ติดเทปกาวสองหน้าที่ด้านหลังของโครงเครื่อง
เราเชื่อมโยงโครงสร้างทั้งหมดของเรา:
ขั้นตอนที่ 5 ห้องโดยสาร
ห้องโดยสารเป็นแบบอิมโพรไวส์ของฉันเองไม่มีคำแนะนำสำเร็จรูปดังนั้นคุณต้องรวบรวมจากรูปถ่าย



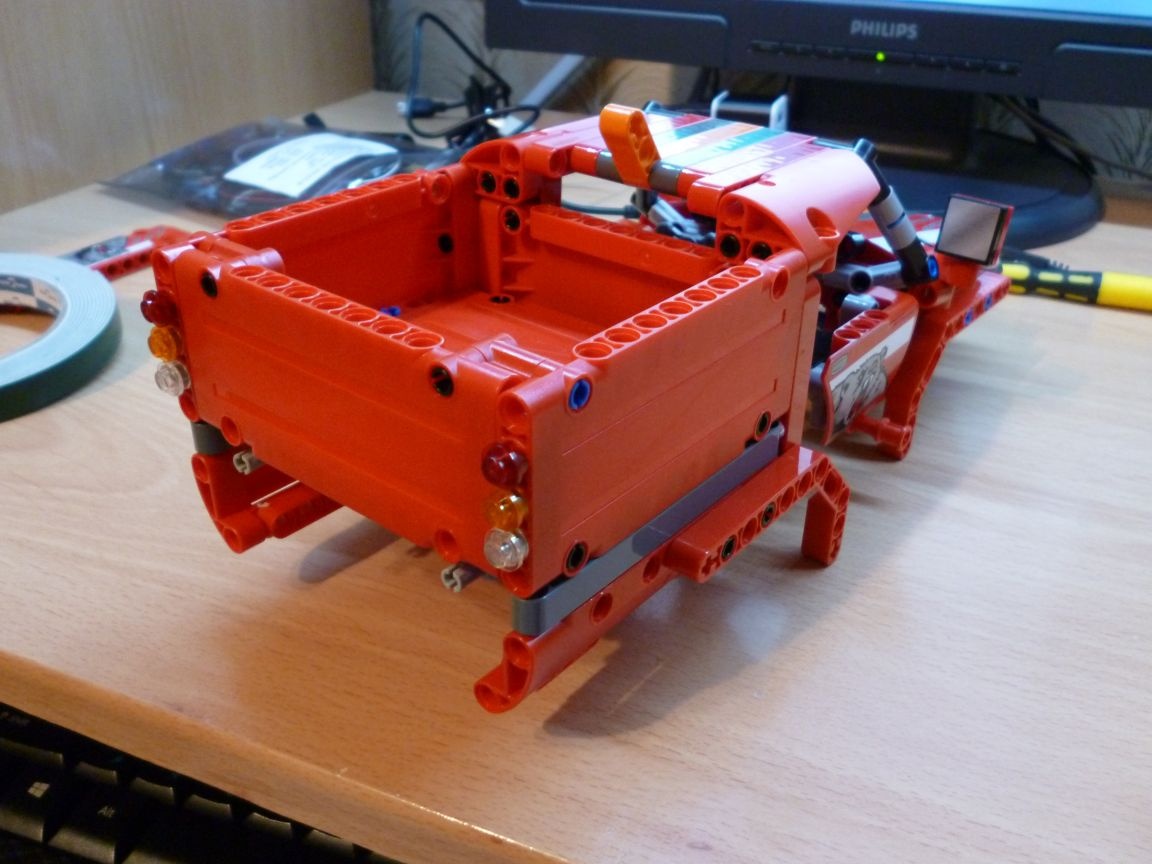
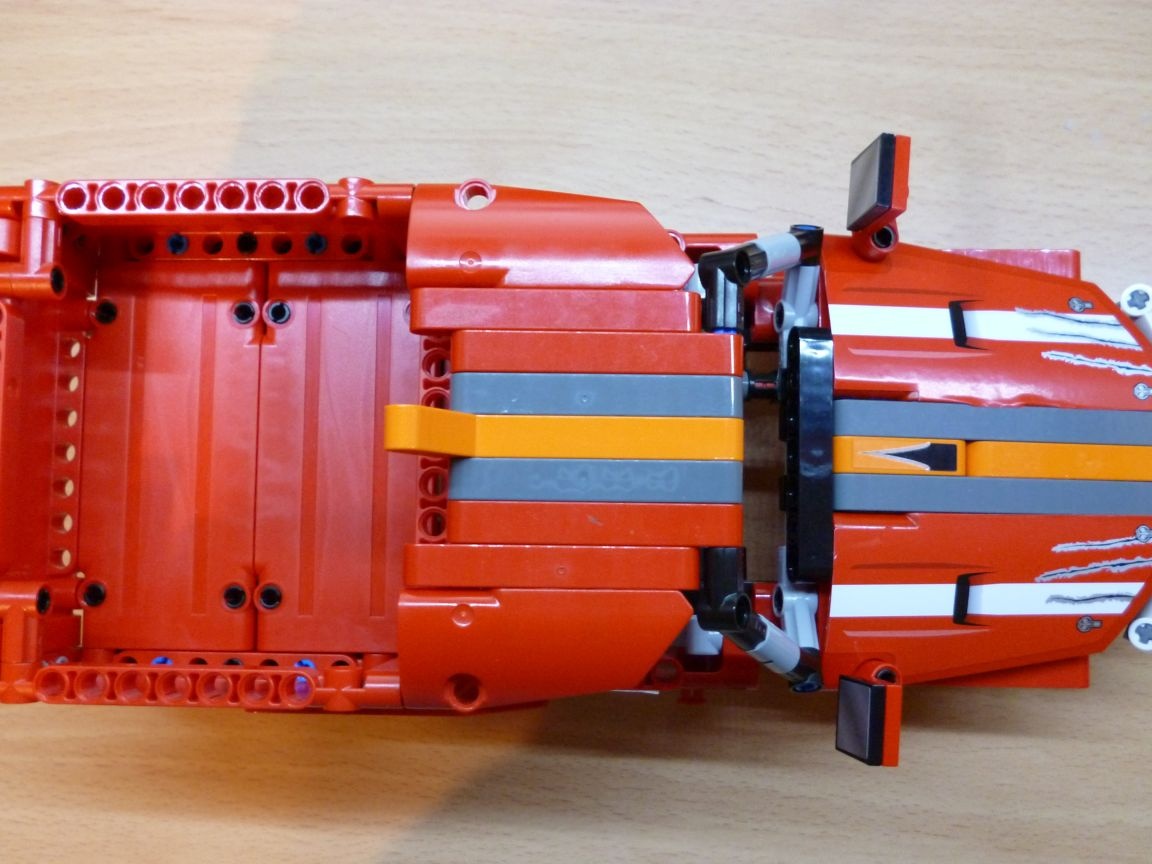
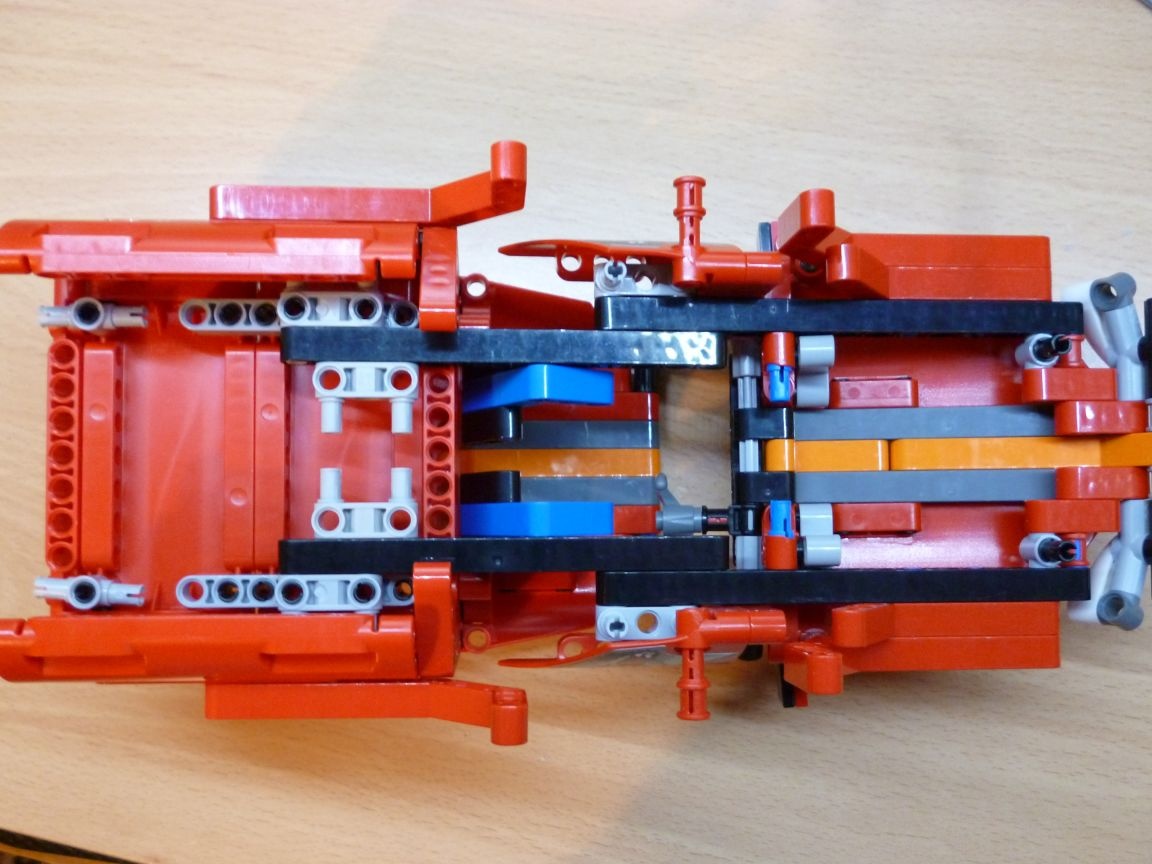
คุณสามารถรวบรวมเวอร์ชั่นของคุณเองคุณเพียงแค่ต้องติดตั้งไว้ใต้แชสซี สิ่งสำคัญที่นี่คือเพื่อให้ตรงกับการติดตั้งกับตัวถัง มีสี่คนและพวกเขาสามารถมองเห็นได้อย่างชัดเจนในภาพจากด้านล่างของห้องโดยสาร
ขั้นตอนที่ 6 เฟิร์มแวร์
อย่างไรก็ตามในวันนี้เช่นเคยฉันเขียนโปรแกรมใน Arduino IDE ก่อนอื่นคุณต้องกรอกเฟิร์มแวร์ของฉันและผ่านเทอร์มินัลดูรหัสการควบคุมระยะไกลที่คุณกำลังจะใช้ คุณสามารถใช้รีโมท IR ได้เช่นจากทีวีเครื่องเล่น DVD หรือประกอบของคุณเอง (ฉันมีรีโมทควบคุมโฮมเมดจาก Sega joystick) โดยการกดปุ่มในเทอร์มินัลเราจะเห็นรหัสของปุ่มกดเขียนลงบนกระดาษ เราทำสิ่งนี้กับปุ่มทั้งหมดที่เราต้องการตั้งโปรแกรมการกระทำ ถัดไปแก้ไขภาพร่าง เราเขียนรหัสของเราลงไปเพื่อการกระทำที่จำเป็นและกระพริบอีกครั้ง เฟิร์มแวร์นี้ได้รับการกำหนดค่าบนรีโมทจอยสติ๊ก Sega ของฉัน ในกระบวนการเล่นกับเครื่องฉันสังเกตเห็นความแตกต่างเล็กน้อยหรือความไม่สะดวก เป็นการยากที่จะบรรลุการรับคำสั่ง IR ที่เชื่อถือได้ระหว่างการเคลื่อนไหว และมันก็เกิดขึ้นเช่นนี้: กดลูกศรไปข้างหน้าเครื่องรับคำสั่งให้ไปและรีบไปข้างหน้าปล่อยลูกศร แต่มันไม่ได้รับคำสั่งหยุดและขับต่อไปจนกว่ามันจะล้มหรือติดมันก็เต็มไปด้วยความล้มเหลว บางส่วนปัญหานี้สามารถแก้ไขได้โดยการเพิ่มจำนวนครั้งในการส่งคำสั่งอย่างไรก็ตามเป็นไปได้เฉพาะเมื่อใช้รีโมตคอนโทรลด้วยตัวเอง แต่ฉันจะเลือกโซลูชันที่สำคัญกว่า - ฉันจะเปลี่ยนเป็นการใช้ตัวรับสัญญาณ 433MHz ฉันจะเขียนเกี่ยวกับเรื่องนี้ในบทความถัดไป
ขั้นตอนที่ 7 ใส่ล้อ
ดังนั้นเราเพียงแค่ต้องใส่ห้องโดยสารบนตัวถังใส่ล้อและตรวจสอบ SUV ของเราในการดำเนินการ

