

การสร้างโครงการเริ่มขึ้นในเดือนกุมภาพันธ์ 2558 เป็นครั้งแรก หุ่นยนต์ บรรทัดของ "Antei" คือ "Domovenok" - แปรงหุ่นยนต์ ต่อมาปรากฏว่า "Antei 1"
แพลตฟอร์ม Anteya เป็นเคสที่ติดตั้งคอนโทรลเลอร์ Arduino Uno เซ็นเซอร์และเครื่องมือสำหรับฟังก์ชั่นต่างๆ Antei ยังสามารถกลายเป็นเครื่องดูดฝุ่น, เครื่องใช้ในครัวเรือน, หุ่นยนต์ยามและอื่น ๆ
แต่คุณสมบัติหลักของ Antey คือการปลด "มด" ที่เคลื่อนไหว Antey
หลักการทำงานของคอมเพล็กซ์ของเรานั้นมาจากธรรมชาติ มดที่เรียกว่าแต่ละตัวสามารถเคลื่อนไหวได้อย่างอิสระ แต่ก็สามารถทำงานรวมได้เช่นกัน ในเวลาเดียวกันพวกเขาไม่เพียง แต่สามารถยกน้ำหนักที่หนักกว่าของพวกเขาได้มากเท่านั้น
มดของเราแต่ละคนมีมอเตอร์สั่นสะเทือน นี่เป็นรูปแบบของแรงขับที่ยังไม่ได้สำรวจ ข้อดีของมันชัดเจน ประการแรกการขับเคลื่อนประเภทนี้ประหยัดพลังงานมากขึ้น ประการที่สองมันมีขนาดกะทัดรัดซึ่งแตกต่างจากมอเตอร์ประเภทอื่น ๆ แต่ให้ประสิทธิภาพที่ดี
เราพบว่า "มด" แต่ละตัวมีน้ำหนัก 8 กรัม สามารถลาก 89g. ซึ่งแสดงว่าเขาสามารถรับน้ำหนักได้ 11 เท่าของเขาเอง
นับตั้งแต่มีการสร้าง Antei มีคำถามเกี่ยวกับจำนวนของมอเตอร์สั่นสะเทือนวิธีตั้งอยู่บนแพลตฟอร์มของหุ่นยนต์และสิ่งที่ควรทำจากขาของมด (แปรงสีฟันหรือขายาง) มีตัวเลือกมากมายพยายามแล้ว
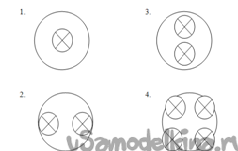
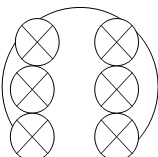
แต่มันก็ตัดสินใจที่จะสร้าง มดแถวที่ 3-4 ที่ขายาง 2 แถว ในแต่ละด้านของแพลตฟอร์มในขณะที่พวกเขาจะต้องอยู่ในการแต่งงานกันอย่างเข้มงวด
ในศูนย์รวมนี้มีการเคลื่อนที่ไปข้างหน้าอย่างมั่นใจและเมื่อปิดเครื่องยนต์บางตัวจะทำการเลี้ยวด้านข้าง


Antey ของเรา
