


วัสดุและเครื่องมือสำหรับการประกอบ:
- ตัวควบคุมแบบหมุน;
- intel Edison ด้วย Arduino คณะกรรมการฝ่าวงล้อม
- ไดรเวอร์ I2C PWM
- การฝ่าวงล้อมนาฬิกาเรียลไทม์;
- มินิ I2C OLED;
- สองเซอร์โว
- สามเซอร์โวพร้อมเกียร์โลหะ
- สายไฟสองเส้นสำหรับไดรฟ์เซอร์โวยาว 30 ซม.
- ช่องเสียบสำหรับเสียบ
- สวิตช์สลับสองตำแหน่ง;
- แปรงและยาสีฟัน
- แหล่งจ่ายไฟสำหรับ 5V 3A;
- เข็มฉีดยาพลาสติก
- ถั่วและสกรู
- ถั่วและแกนเกลียว
- แผ่นอะครีลิคใสขนาด 61 ซม. x 61 ซม. x 3 มม.
- ไม้อัดขนาด 91 ซม. x 61 ซม. x 6 มม.
- เครื่องพิมพ์ 3 มิติ
กระบวนการประกอบหุ่นยนต์:
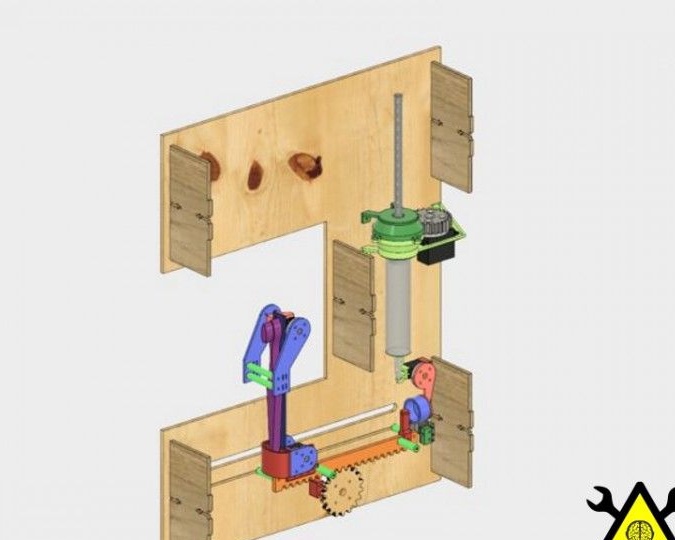
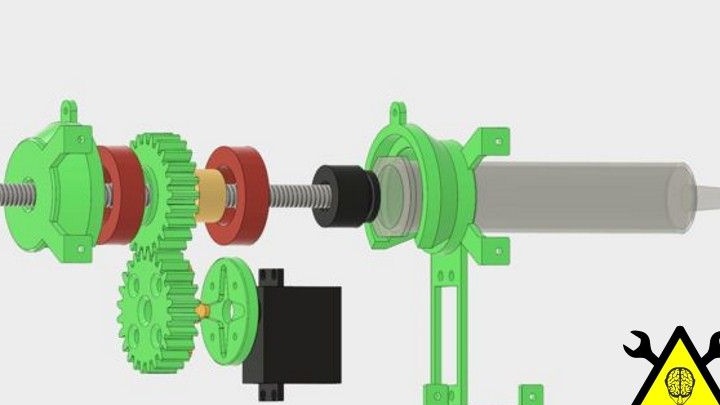
ขั้นตอนแรก ชิ้นส่วนเครื่องจักรกล
อุปกรณ์ถูกสร้างแบบจำลองครั้งแรกโดยใช้ Fusion 360 และ Illustrator ในกระบวนการนี้เทคโนโลยีทั้งหมดได้ถูกสร้างขึ้นซึ่งรวมถึงการพิมพ์ 3 มิติรวมถึงการตัดด้วยเลเซอร์ของโลหะ โดยรวมแล้วระบบสามารถแบ่งออกเป็นสี่โหนดหลัก ซึ่งรวมถึงการขนส่งผู้ถือแปรงสีฟันตัวหลักและเครื่องจ่าย
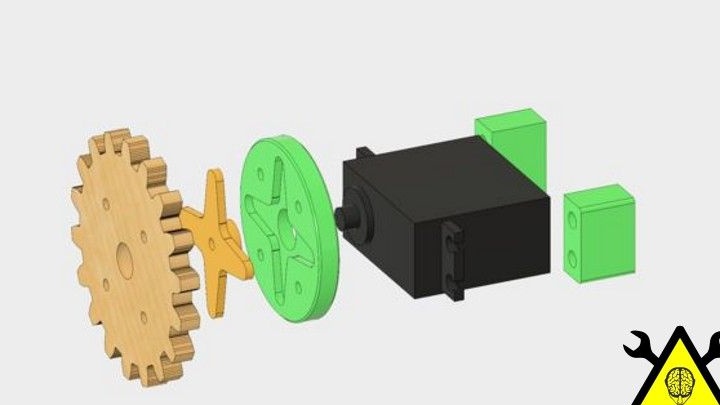
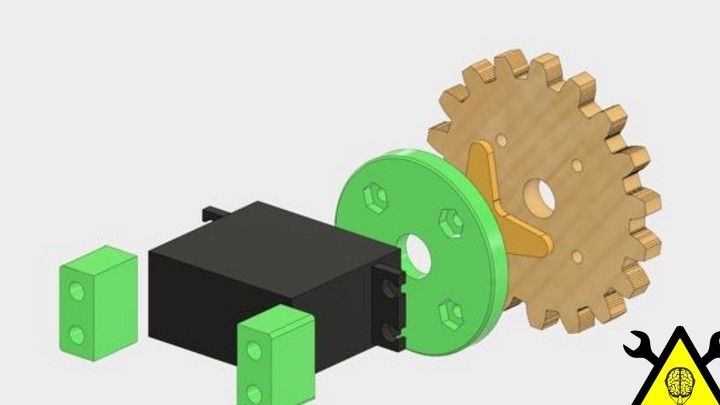
เพื่อให้ผลิตภัณฑ์ทำที่บ้านใช้สำหรับความต้องการที่กว้างขึ้นจึงตัดสินใจสร้างแบบจำลองอะแดปเตอร์สำหรับมาตรฐานและไมโครเซอร์โว อะแดปเตอร์เหล่านี้มีช่องสำหรับเสียบเพลามาตรฐานและมีที่ว่างสำหรับสี่น็อตด้านหลัง เนื่องจากความจริงที่ว่าอะแดปเตอร์ถูกออกแบบมาสำหรับเพลาพวกเขาจะต้องแนบทั้งกับแผ่นหรือวัตถุอื่น ๆ

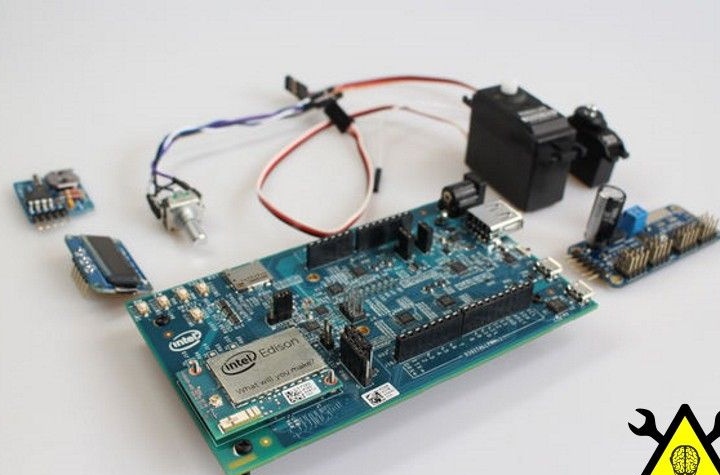
ขั้นตอนที่สอง วงจรไฟฟ้าของอุปกรณ์
แหล่งจ่ายไฟ 5V และ 3A ใช้เป็นพลังงาน เพียงพอสำหรับเครื่องยนต์หนึ่งเครื่อง สำหรับกระดานหลักนั้นกินไฟประมาณ 500 mA และมอเตอร์ไดรฟ์ LED ดั้งเดิมและนาฬิกาแบบเรียลไทม์ใช้กระแสไฟฟ้าเพียงเล็กน้อย
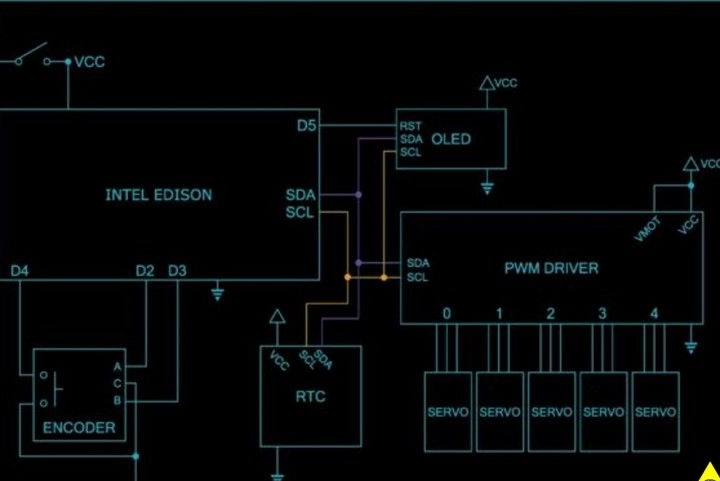
โปรเซสเซอร์ Intel Edison ใช้เป็นตัวควบคุมหลักของระบบ เนื่องจากการแยกบอร์ดทำให้โปรเซสเซอร์สามารถสื่อสารกับส่วนประกอบอื่น ๆ ของอุปกรณ์อิเล็กทรอนิกส์ได้อย่างง่ายดาย บอร์ดเชื่อมต่อกับเครื่องยนต์นาฬิกาและหน้าจอ
เพื่อควบคุมเซอร์โวห้าตัวจะใช้บอร์ด PWM กำลังของเครื่องยนต์สามารถควบคุมได้โดยใช้แหล่งภายนอก แต่ผู้เขียนตัดสินใจที่จะผูก Vmot กับขา VCCด้วยเหตุนี้ทั้งระบบขับเคลื่อนโดย 5V
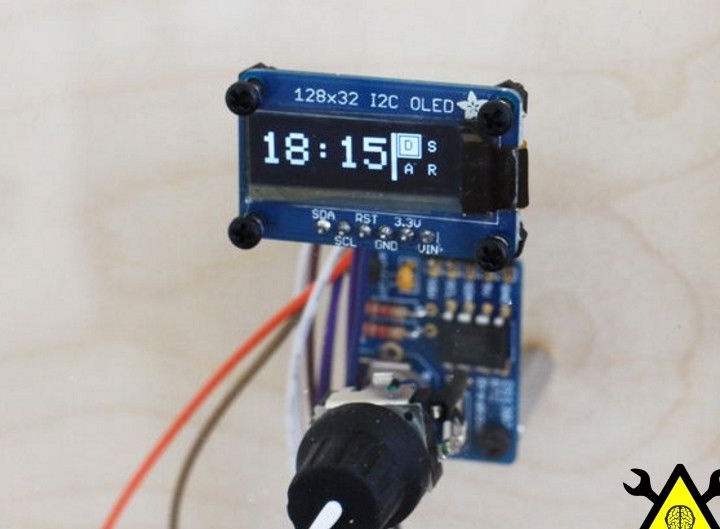
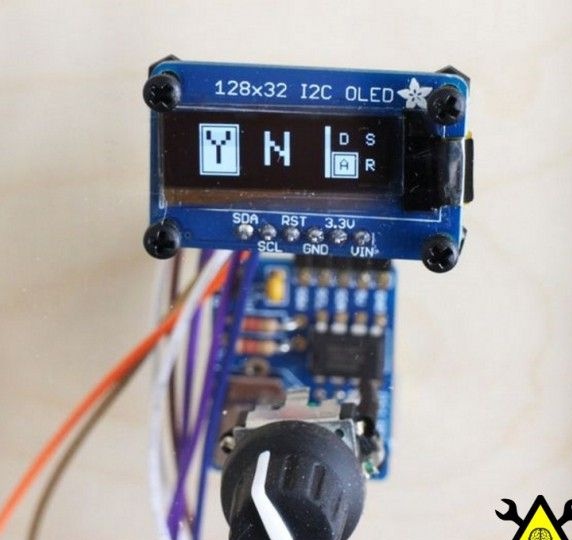
เพื่อให้สามารถควบคุมอุปกรณ์ได้จะใช้หน้าจอขนาด 128 x 32 ขนาดเล็กเซ็นเซอร์แบบหมุนทำหน้าที่เป็นอินพุตหลักของผู้ใช้ เอาต์พุตของเซ็นเซอร์เชื่อมต่อกับหน้าสัมผัสดิจิตอลของโปรเซสเซอร์
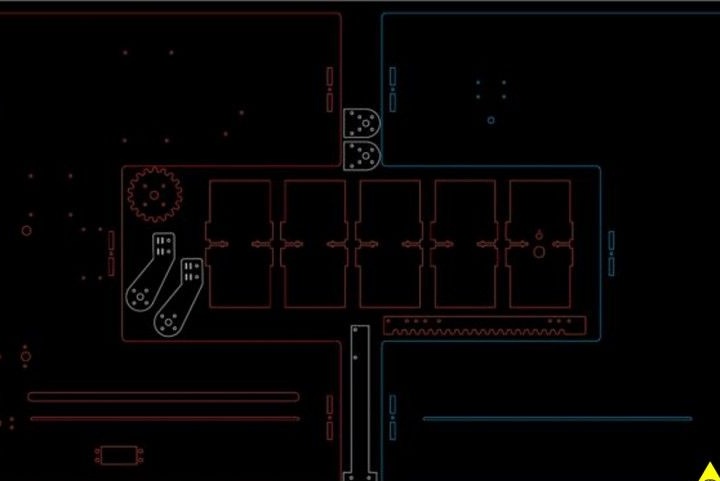
ขั้นตอนที่สาม ประกอบร่างกาย
ส่วนด้านหลังทำหน้าที่รองรับเคสตัวเครื่องทำจากไม้อัดที่มีความหนา 6 มม. ใช้สกรูสี่ตัวเพื่อรักษาความปลอดภัยของ PWM และโปรเซสเซอร์ Edison ติดตั้งที่ด้านหน้าและ PWM ที่ด้านหลัง
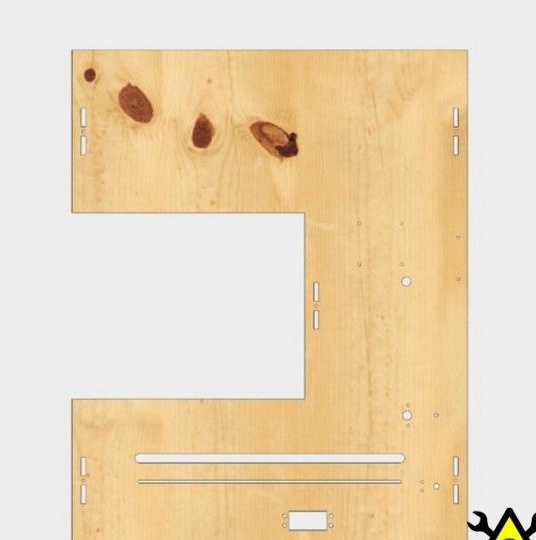
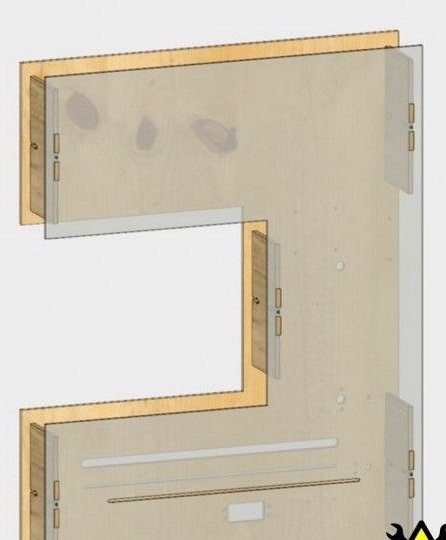
แผ่นรองจานห้าแผ่นใช้สำหรับเชื่อมต่อแผงด้านหน้าและด้านหลัง Spacers ยึดกับแผ่นด้วยสกรูและน็อตที่เหมาะสม แผ่นเปลือกโลกเกือบจะสมมาตร แต่ส่วนที่ยื่นออกมาที่ขอบหนึ่งจะสั้นกว่า แต่ไม่ยื่นออกไปข้างหน้า สวิทช์พร้อมกับขั้วต่อเพาเวอร์ติดอยู่กับป๋อล่าง

สำหรับแผงด้านหน้านั้นจำเป็นอย่างมากในการปกป้องอุปกรณ์ระหว่างการใช้งาน ใช้สกรูสี่ตัวเพื่อยึดหน้าจอให้แน่นและมีเซ็นเซอร์แบบหมุนพร้อมกับน็อต
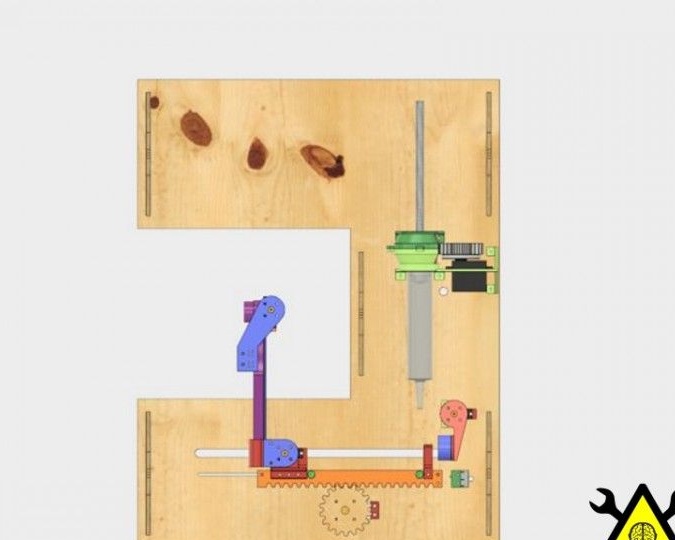
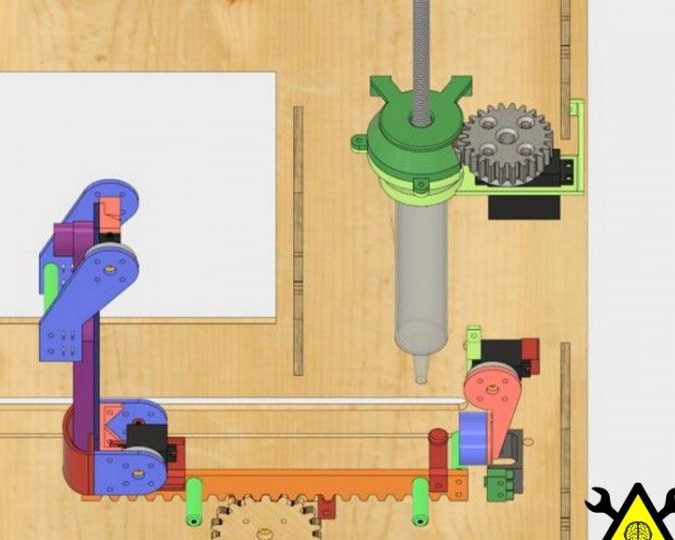
ขั้นตอนที่สี่ แปรงสีฟัน
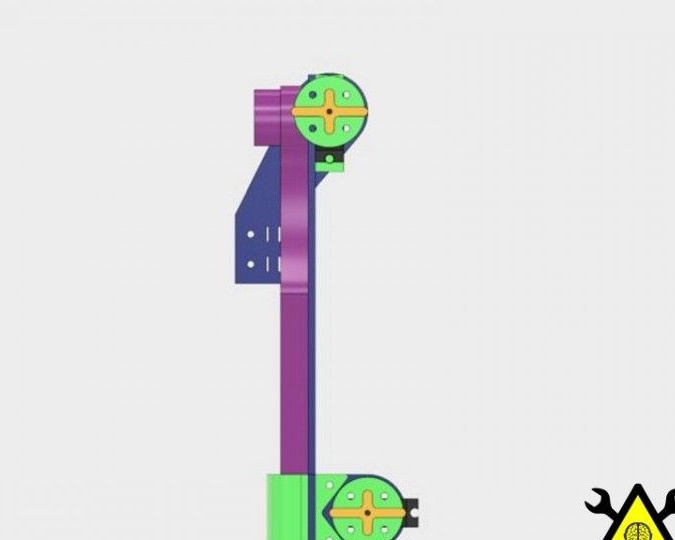
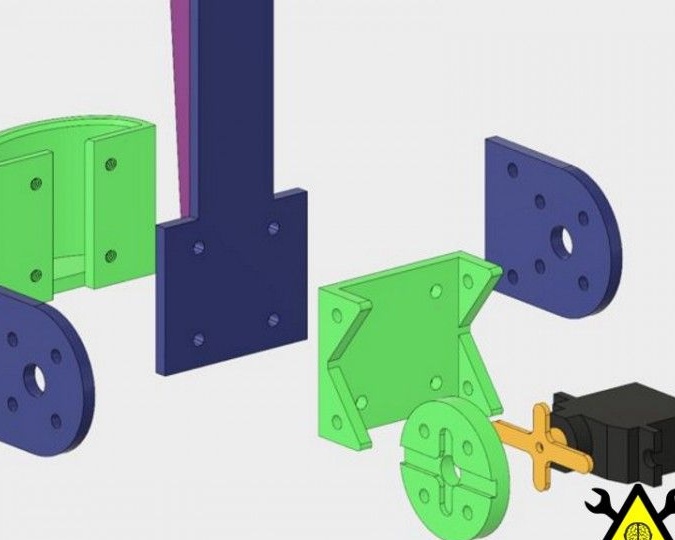
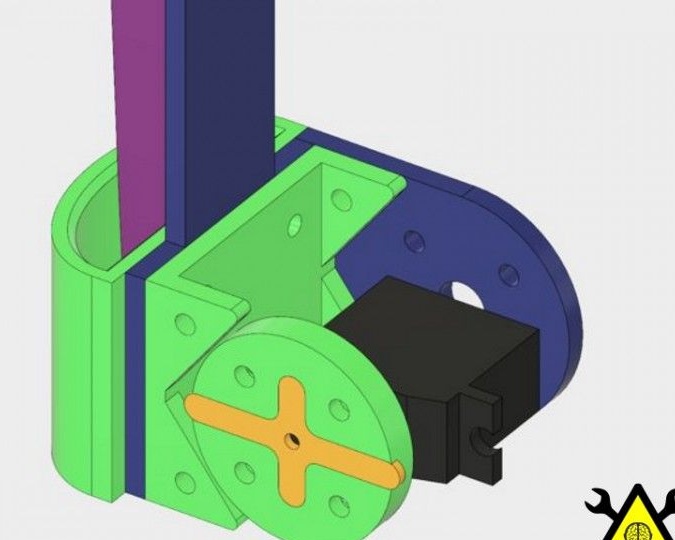
มีสองเซอร์โวบนที่ใส่แปรงสีฟันซึ่งขับเคลื่อนด้วยส่วนประกอบ - ฐานและ "หัว" ในภาพคุณจะเห็นองค์ประกอบของสีน้ำเงินและสีเขียว สิ่งที่ถูกตัดด้วยเครื่องตัดเลเซอร์คือสีน้ำเงินและองค์ประกอบที่พิมพ์บนเครื่องพิมพ์ 3D เป็นสีเขียว

ขอบคุณที่หัวแปรงสีฟันไม่ตก มือถูกขับเคลื่อนด้วยไดรฟ์เซอร์โวเดียวพวกเขาถูกมัดด้วยปะเก็นสองอัน ใช้อะแดปเตอร์ 3D และสกรูสองตัวเพื่อเชื่อมต่อเซอร์โวมอเตอร์กับแผ่นหลัก มีสี่ช่องในแผ่นผ่านพวกเขาด้วยความช่วยเหลือของแถบยางสีดำติดแปรงสีฟัน
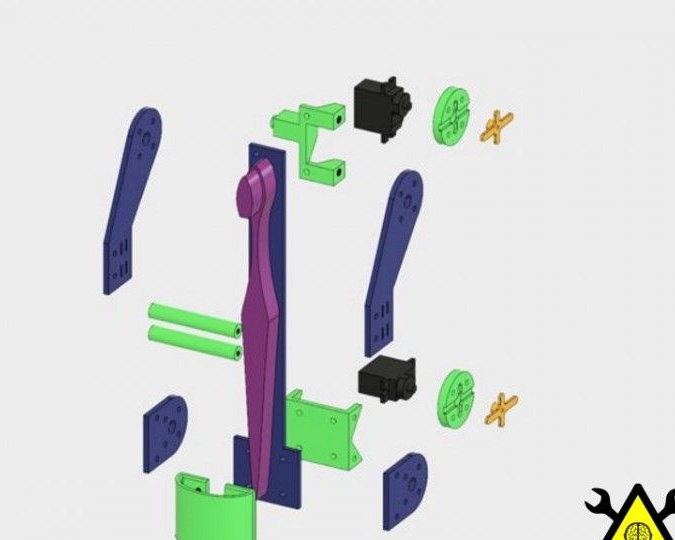
ฐานเป็นถ้วยสามมิติขนาดเล็กมันป้องกันไม่ให้แปรงหลุด หลังจากโหลดแปรงสีฟันลงในชุดประกอบแล้วไดรฟ์เซอร์โวจะจับและหมุนลง ใช้สกรูแปดตัวเชื่อมต่อแผ่น


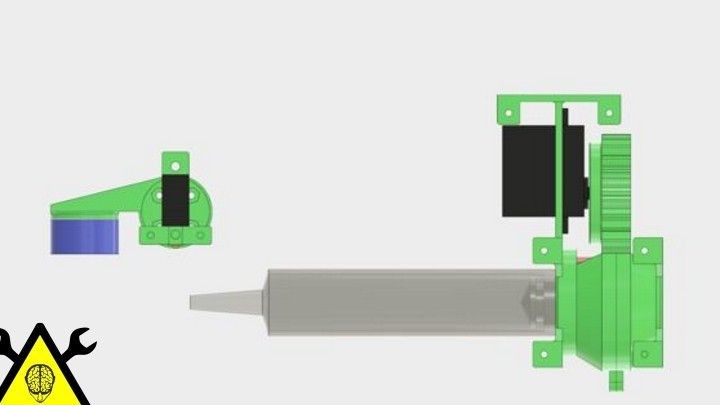
ขั้นตอนที่ห้า การติดตั้งราง
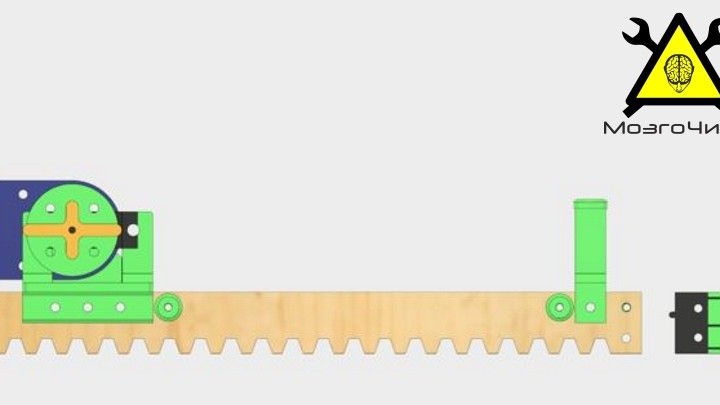
กรอบประกอบด้วยสามส่วนที่ไม่ซ้ำกันนี้เป็นพนักพิงศีรษะสายการบินและเสา โดยใช้แคร่ตลับหมึก แคร่ตลับหมึกถูกยึดด้วยสกรูสามตัว จำเป็นต้องมีพนักพิงศีรษะเพื่อลดภาระของตัวยึดเซอร์โวหลักมันถูกติดตั้งเพิ่มเติมบนแคร่บนเฟรม
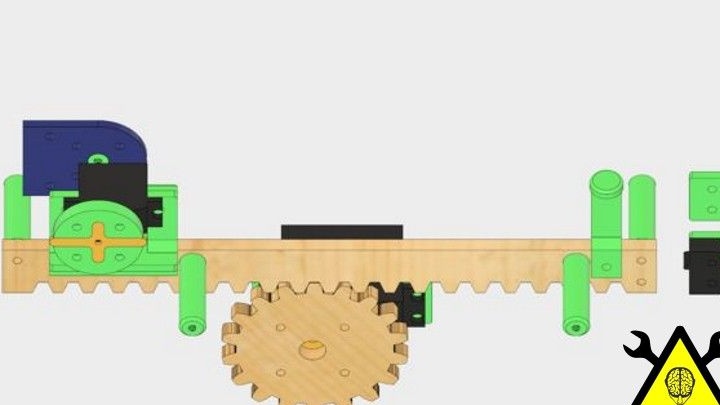
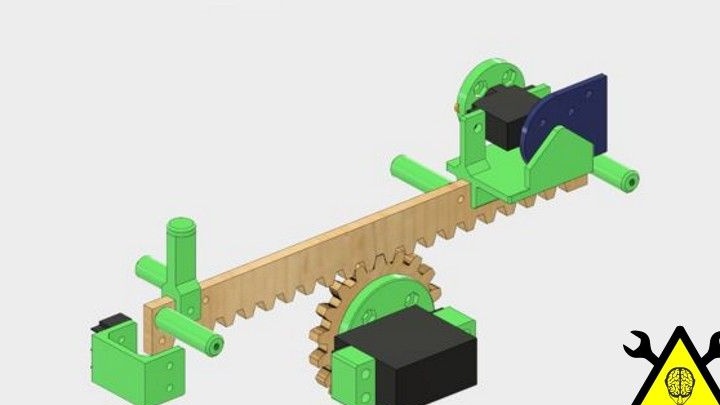
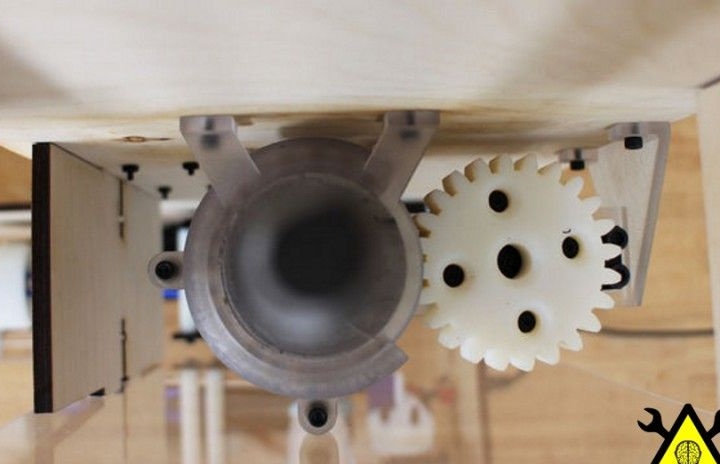
เกียร์ติดตั้งอยู่ใต้เฟรม มันถูกตัดจากไม้อัดหนา 6 มม. และยึดติดกับเพลาเซอร์โวมาตรฐาน ไดรฟ์เซอร์โวนั้นวางอยู่ตรงข้ามเล็กน้อยจากแผ่นฐานในการเชื่อมต่อกับสิ่งนี้มีเสาสี่เหลี่ยมที่เหมือนกันบนมัน เซอร์โวตัวเองติดอยู่กับฐานด้วยสกรูสี่ตัว
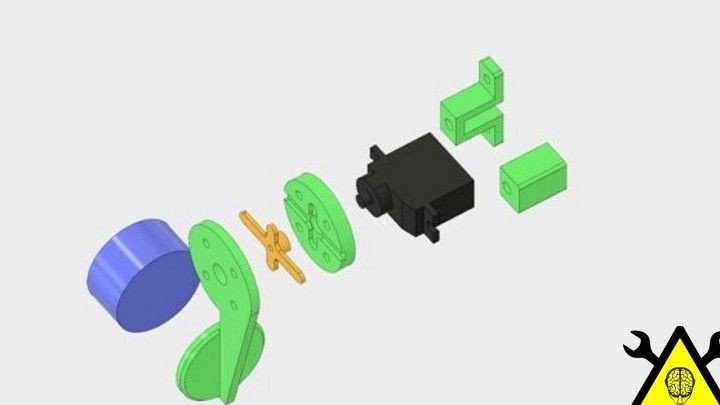
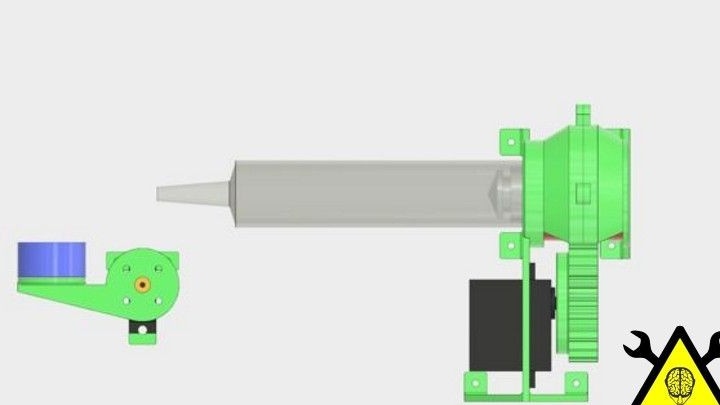
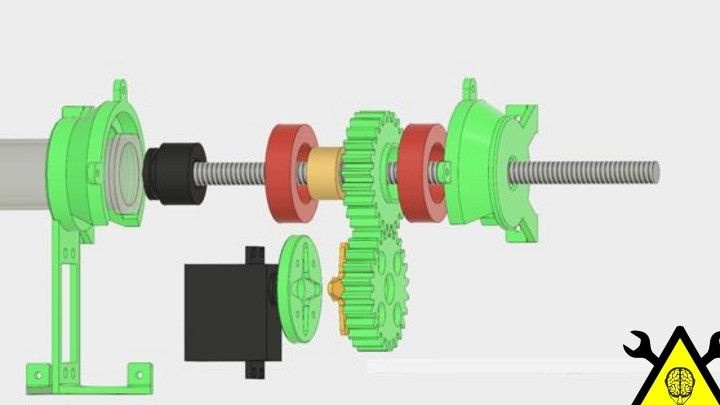
ขั้นตอนที่หก ติดตั้งเครื่องจ่าย
กลไกที่ซับซ้อนที่สุดในอุปกรณ์คือไดรฟ์เชิงเส้น ขอบคุณเขาปริมาณของวางที่เกิดขึ้น แกนของอุปกรณ์เป็นแกนเกลียวและน็อตด้วยความช่วยเหลือของสิ่งนี้ท่อถูกบีบอัด ใช้สกรูหกตัวเพื่อยึดไดร์ฟ
ขั้นตอนที่เจ็ด ซอฟต์แวร์
โดยรวมแล้วโปรแกรมมีฟังก์ชั่นสามฟังก์ชั่น: การตั้งค่าเวลาตั้งค่า "สัญญาณเตือน" และฟังก์ชั่นการเริ่มต้นอุปกรณ์
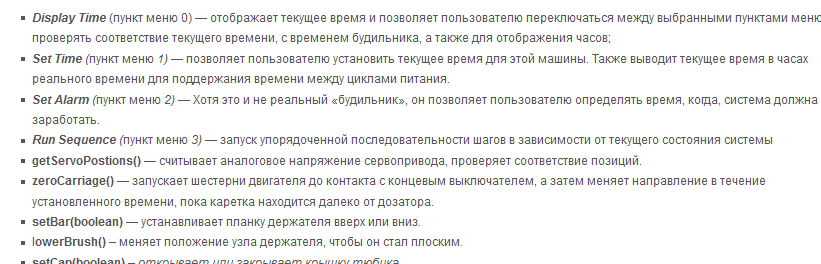
นั่นคือทั้งหมดหลังจากกระพริบและกำหนดค่าอุปกรณ์ให้พร้อมใช้งาน