

ผู้เขียนใช้โครงงานนี้ในเวอร์ชันที่ง่ายกว่า ทำที่บ้าน เรือและทำให้มันสมบูรณ์แบบ เซ็นเซอร์จะถูกวางไว้ในเรือเพื่อหลีกเลี่ยงสิ่งกีดขวางและเคลื่อนไปยังแสง วิธีการใช้งานคอนโทรลเลอร์ในเรือ Arduinoด้านหน้าจะติดตั้งเซ็นเซอร์อัลตราโซนิกและเซ็นเซอร์ตรวจจับแสงจะอยู่ด้านข้าง เรือง่าย ๆ นี้ไม่ชนเข้ากับกำแพงและถูกควบคุมโดยไฟฉาย
วัสดุและเครื่องมือ:
- เทปฉนวน / เทปกาว
- Thermoglue ด้วยกาวร้อน
- มอเตอร์กระแสตรง 2 ชิ้น
- ขวดพลาสติก 2 ชิ้น
- สายไฟ
- ใบพัดขนาดเล็ก 2 ชิ้น
- Arduino คอมพิวเตอร์และสายเคเบิล USB
- กล่องพลาสติก
- แบตเตอรี่ 9V และขั้วต่อ
- ไดโอดพลังงาน (ประเภท 1N4004)
- ตัวต้านทาน
- ทรานซิสเตอร์ MOSFET หรือ TIP 120
- โฟโต้เซลล์สองตัวและสองปุ่ม
- กรรไกร
- บัดกรีด้วยหัวแร้ง

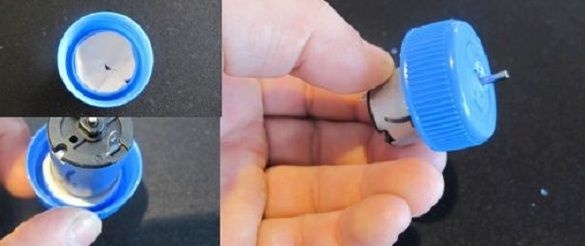
ขั้นตอนที่ 1 การติดตั้งเครื่องยนต์
ฝาจะถูกลบออกจากขวดและทำหลุมในแต่ละของพวกเขา ภายในฝาปิดผู้เขียนบีบกาวร้อนโดยไม่ปิดรู เขาวางเพลามอเตอร์ในรูและวางลงบนกาว หลังจากกาวแห้งแกนหมุนได้อย่างอิสระ กระบวนการเดียวกันนี้เกิดขึ้นกับฝาปิดที่สอง
ขั้นตอนที่ 2 การติดขวด
ขวดถูกผูกเข้าด้วยกันโดยหลักการของแพด้วยความช่วยเหลือของเทปกาวสามแถบ

ขั้นตอนที่ 3 การบัดกรีไปยังเครื่องยนต์
เนื่องจากเครื่องยนต์ที่ติดตั้งในปลั๊กไม่มีลวดจึงจำเป็นต้องบัดกรีพวกเขาความยาวของสายไฟประมาณ 25-30 ซม.

ขั้นตอนที่ 4. การหั่นขวด
เพื่อให้สายไฟตกลงไปในลำเรือมีช่องเล็ก ๆ ทำจากด้านบน

ขั้นตอนที่ 5 การรักษาความปลอดภัยของมอเตอร์
นอกจากนี้ผู้เขียนบิดฝาบนขวดเนื่องจากพวกเขาไม่ได้บิดอย่างดีฉันต้องใช้กาวร้อน สายไฟจะถูกผลักผ่านรูที่เตรียมไว้บนขวด

ขั้นตอน 6. กรณี
กล่องพลาสติกติดกับสองขวด ในความจุของอุปกรณ์อิเล็กทรอนิกส์นี้คุณสามารถสร้างรูสำหรับสายไฟหรือเก็บสายไฟไว้ทางด้านหลังของกล่อง รูสำหรับสายไฟบนขวดถูกหุ้มด้วยกาวร้อนละลาย

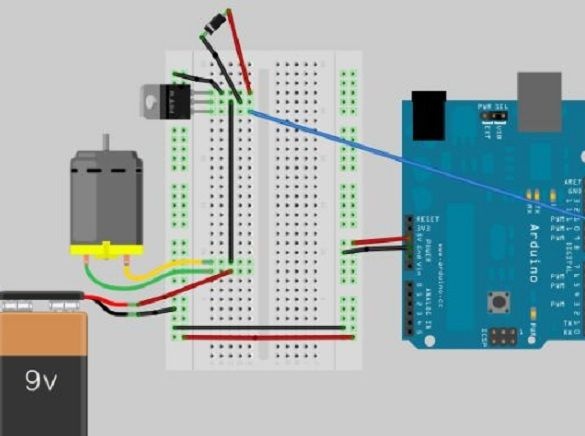
ขั้นตอนที่ 7 แผนภาพการเดินสายไฟ
วงจรใช้ทรานซิสเตอร์ TIP 120 เป็นสวิตช์ (คุณสามารถใช้ทรานซิสเตอร์ MOSFET หรือดาร์ลิงตันที่คล้ายกัน) มันถูกใช้เพื่อสลับโหลดเมื่อใช้กระแสไฟฟ้าจำนวนมากเนื่องจาก Arduino ไม่มีพลังงานเพียงพอสำหรับมอเตอร์ วงจรนี้ประกอบขึ้นเป็นครั้งแรกแล้วสำหรับเครื่องยนต์ที่สอง (ไม่ต้องใช้แบตเตอรี่อื่นสำหรับเครื่องยนต์ที่สอง)
ขั้นตอนที่ 8 เซ็นเซอร์
เซ็นเซอร์อัลตราโซนิคเหมาะอย่างยิ่งสำหรับด้านหน้าของเรือเตือนสิ่งกีดขวางระหว่างทาง โฟโตเซลล์ทำหน้าที่เหมือนเสาอากาศและถูกใช้เพื่อทำให้เรือลอยไปในแสงปุ่มด้านข้างใช้เป็นเซ็นเซอร์ตรวจจับสิ่งกีดขวาง คุณสามารถปรับเปลี่ยนรหัสและใช้เซ็นเซอร์อื่น ๆ เช่นอินฟราเรด

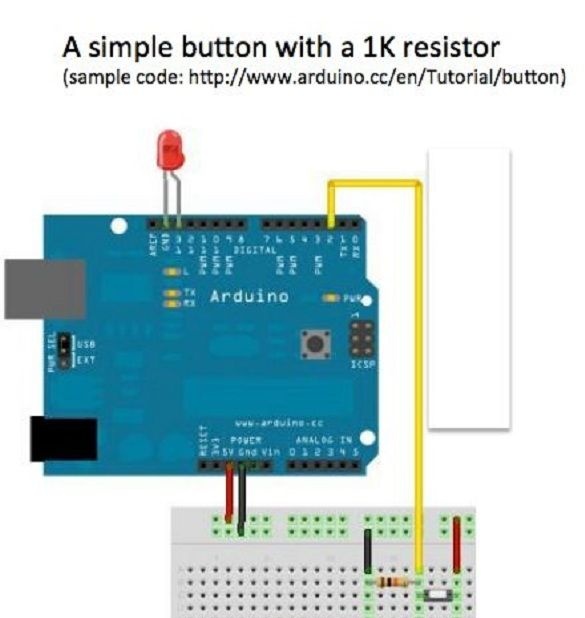
ขั้นตอนที่ 9 แบบแผนสำหรับเซ็นเซอร์
แผนภาพแสดงการเชื่อมต่อของปุ่มอย่างง่ายและตัวต้านทาน 1K รูปแบบสำหรับปุ่มทั้งสองนั้นซ้ำ ๆ กันปุ่มต่าง ๆ วางอยู่บนทั้งสองด้านของเรือ พวกเขาจะต้องรับผิดชอบในการเปลี่ยนแปลงการเคลื่อนไหวของเรือในการปะทะกัน
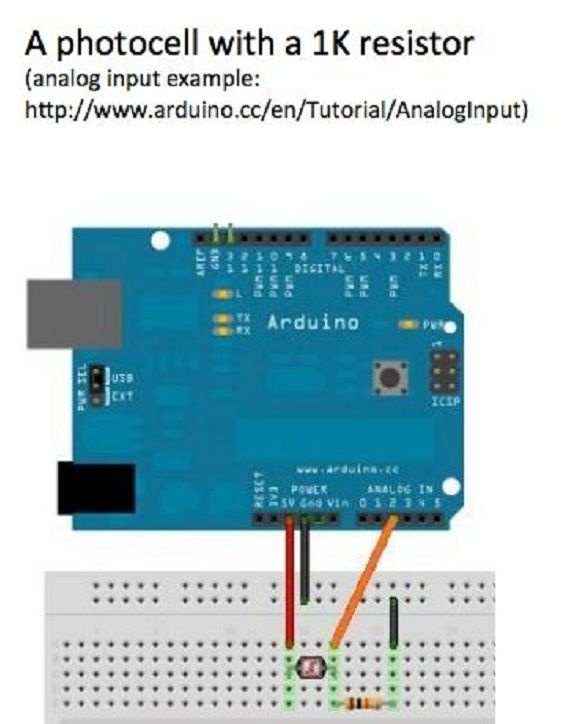
รูปต่อไปนี้แสดงวงจรที่มีตัวต้านทาน 1K และตาแมว ผู้เขียนทำการแสดง 2 ครั้งและวางตาแมวที่ด้านตรงข้ามของเรือ
ขั้นตอนที่ 10 รหัสโปรแกรม
ผู้เขียนให้โอกาสในการดาวน์โหลดรหัสเพื่อการใช้งานดังนั้นจึงมีฟังก์ชั่นพื้นฐานสำหรับผู้ที่จะประกอบเรือดังกล่าว รหัสนี้มีการรองรับโฟโตเซลล์, เรนจ์ไฟร์และปุ่มต่างๆ เรือจะพยายามหลีกเลี่ยงสิ่งกีดขวางที่อยู่ข้างหน้าและหมุนไปในทิศทางตรงกันข้ามเมื่อเจอสิ่งกีดขวางจากด้านข้าง หากไม่ต้องการใช้ทั้งชุดเซ็นเซอร์ แต่มีเพียงบางส่วนเท่านั้นที่มีรหัสสำหรับแต่ละชุดแยกกัน คุณสามารถดาวน์โหลดรหัสทั้งหมดภายใต้บทความ
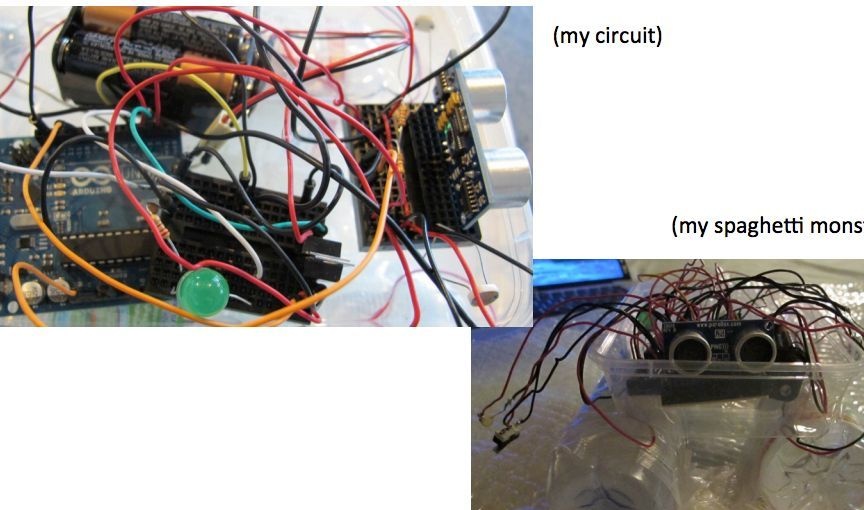
ขั้นตอนที่ 11 การประกอบเรือ
ประกอบวงจร Arduino และแบตเตอรี่บรรจุกล่อง
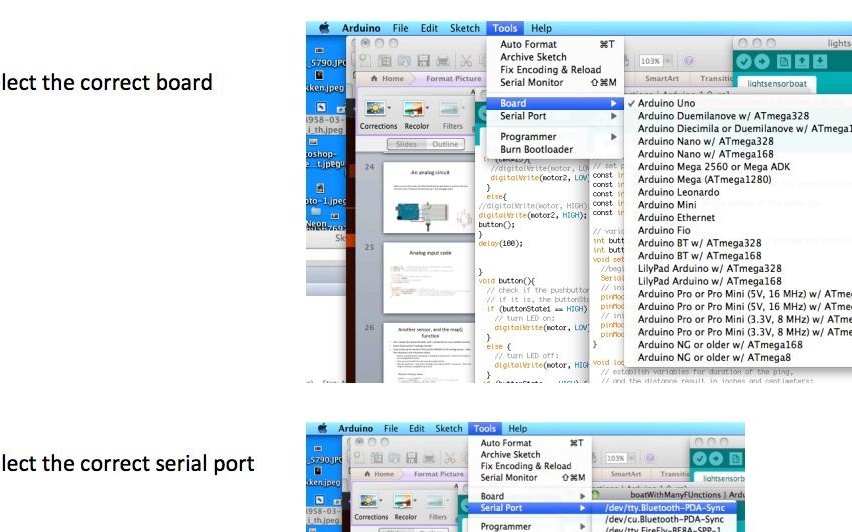
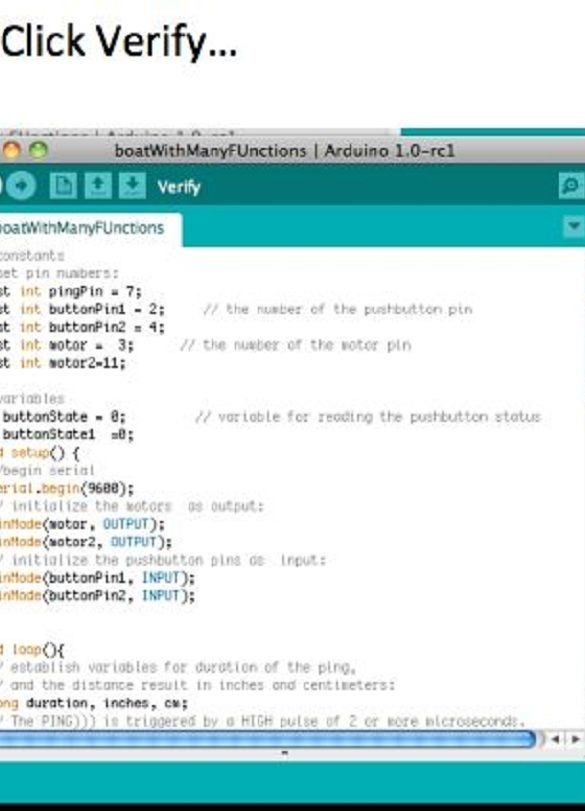
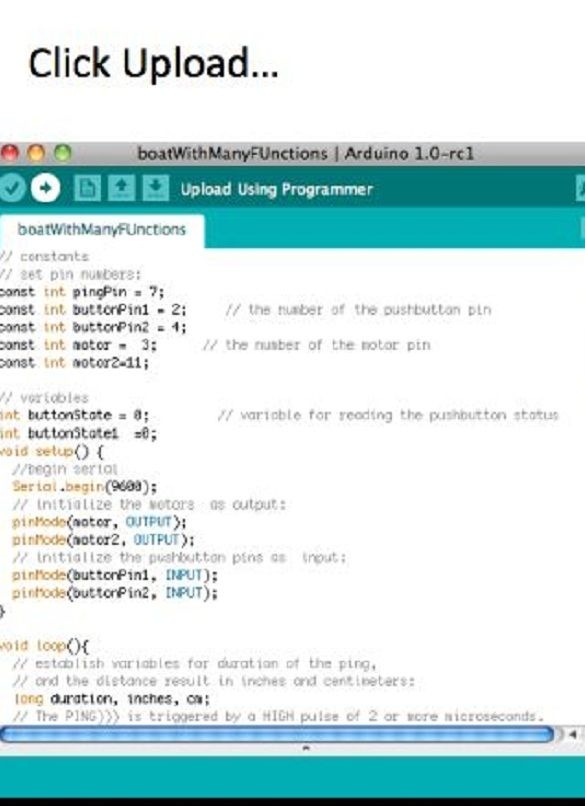
ขั้นตอนที่ 12. ดาวน์โหลดภาพร่าง
ถัดไป Arduino IDE จะเปิดขึ้นโดยเลือกไฟล์และพอร์ตที่ถูกต้องหลังจากนั้นผู้เขียนรวบรวมและอัปโหลดรหัสไปยังคอนโทรลเลอร์
ขั้นตอนที่ 13 กันน้ำและทดสอบ
ผู้เขียนยังแยกแหล่งน้ำที่มีศักยภาพทั้งหมดด้วยกาวร้อน หุ้มฉนวนสายไฟทั้งหมดจากไฟฟ้าลัดวงจร ภาชนะที่มี Arduino ปกคลุมด้วยกล่องเดียวกันและปิดผนึกด้วยเทปไฟฟ้า ใบพัดจะติดกับมอเตอร์ ที่นี่เรือพร้อมแล้วตอนนี้คุณสามารถเริ่มทดสอบน้ำได้



วิดีโอพร้อมการทดสอบเบื้องต้นของเรือ: