Carpet Crawler เป็นหุ่นยนต์ขนาดเล็กที่อยู่ในคลาส BEAM อย่างเช่น หุ่นยนต์ ทันทีรวมสององค์ประกอบเช่นสุนทรียศาสตร์ชีววิทยา อิเล็กทรอนิกส์ และกลศาสตร์ ด้วยวิธีนี้หุ่นยนต์ดังกล่าวเลียนแบบสิ่งมีชีวิตให้มากที่สุดเท่าที่จะเป็นไปได้บางครั้งดูเหมือนว่าพวกเขาสามารถคิดได้
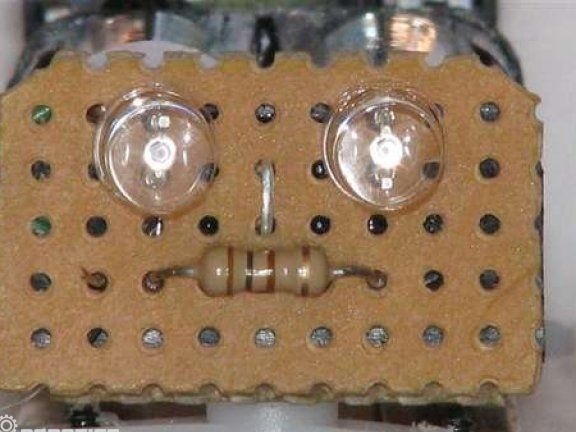
ในฐานะที่เป็นสมองสำหรับหุ่นยนต์เช่นรีเลย์เซ็นเซอร์และสวิตช์ที่ใช้และย้าย สินค้าทำที่บ้าน เนื่องจากการ servomotor ใช้แบตเตอรี่ AAA เป็นพลังงาน เมื่อดวงตาที่ลุกไหม้อย่างสว่างไสวจึงติดตั้ง LED สองดวง
วัสดุและเครื่องมือสำหรับการผลิต:
- แถบทองเหลืองขนาด 1/32 "x 1/4" x 8 "
- แถบทองแดงสองชิ้น
- M2 ถั่วและบอท
- เซอร์โวมอเตอร์ (Micro RC (7.5 กรัม))
- ไมโครวินาทีสองอัน (สามารถหาได้จากไดรฟ์เก่า)
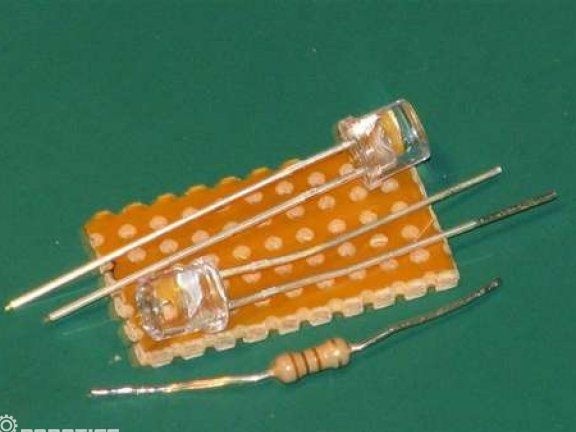
- ไฟ LED สองดวง (ควรใช้สีแดงเพราะสีขาวหรือสีน้ำเงินในกรณีนี้สามารถใช้งานได้);
- ตัวต้านทาน 100R หนึ่งตัว (หาก LED เป็นสีเหลืองหรือสีเขียวหมายถึง 47R);
- แบตเตอรี่ AAA สองก้อนและที่ยึดสำหรับพวกเขา;
- สายไฟบาง ๆ




กระบวนการผลิต:
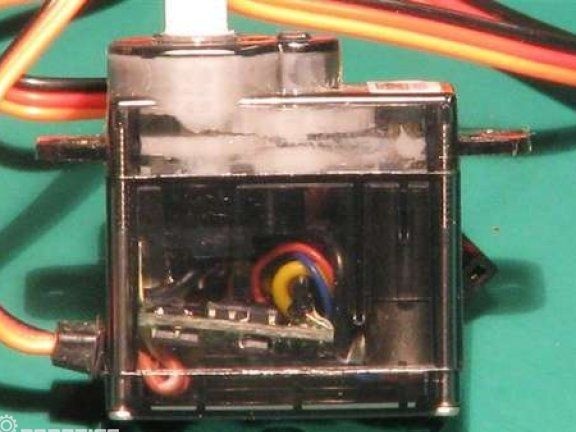
ขั้นตอนแรก การเปลี่ยนแปลงของเซอร์โวมอเตอร์
เซอร์โวมอเตอร์ได้รับการออกแบบในลักษณะที่ในระหว่างการดำเนินการมันทำให้การเคลื่อนไหวหุนหันพลันแล่น ในกรณีนี้จะต้องทำการประดับใหม่เพื่อให้สามารถหมุนได้ มีสองวิธีในการทำเช่นนี้
ในกรณีแรกคุณสามารถบันทึกความเร็วและทิศทางจากการควบคุมเครื่องยนต์เช่นเดียวกับการควบคุมอิเล็กทรอนิกส์ อุปกรณ์ยังคงต้องใช้พัลส์ที่เข้ามาเพื่อใช้งาน
ผู้เขียนไปทางอื่น มีความจำเป็นต้องตัดองค์ประกอบหยุดของเกียร์ จากนั้นจะต้องมีการจัดเรียงเกียร์มันจะเป็นการยากที่จะรวบรวมพวกมันกลับมาถ้าลำดับนั้นหายไป เมื่อทำการแยกส่วนพื้นผิวของเซอร์โวมอเตอร์จะต้องหล่อลื่นด้วยจาระบีซิลิโคน
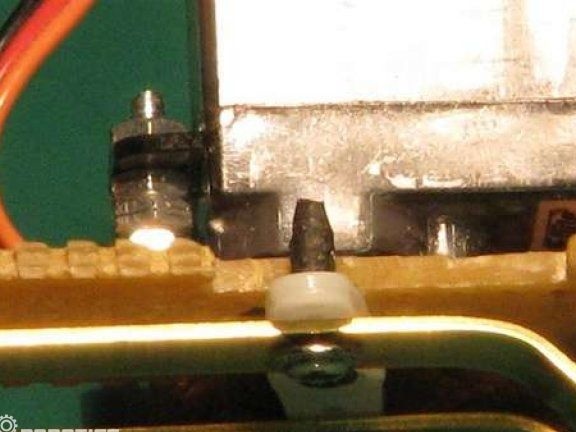
ภาพแสดงกลไกการควบคุม RSV ที่ต้องเคลื่อนย้าย

หลังจากถอดบอร์ดออกแล้วลวดสีแดงจะต้องเปลี่ยนไปเป็นสายสีแดงนั้นของมอเตอร์ ควรห่อสายอย่างระมัดระวังด้วยเทปไฟฟ้าเพื่อหลีกเลี่ยงการลัดวงจร

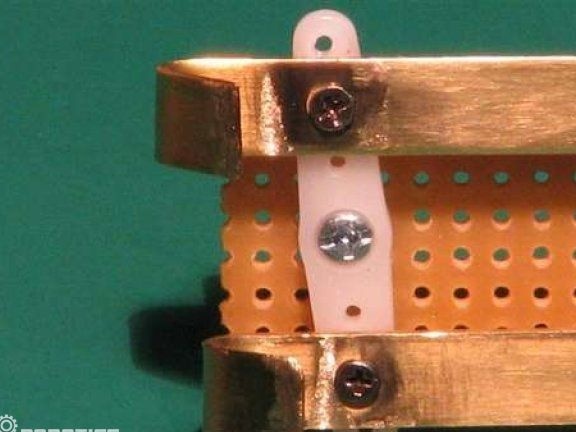
ขั้นตอนที่สอง สร้างชิ้นส่วนเชิงกล
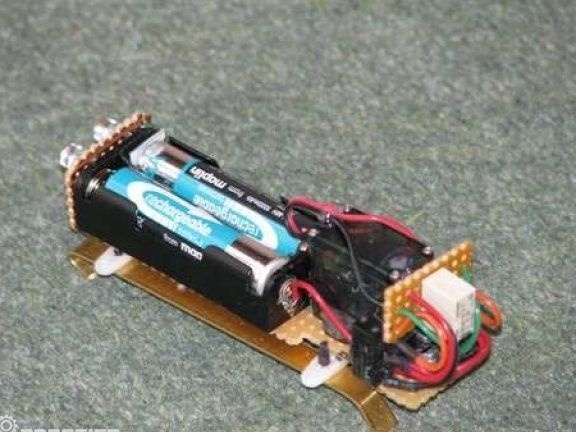
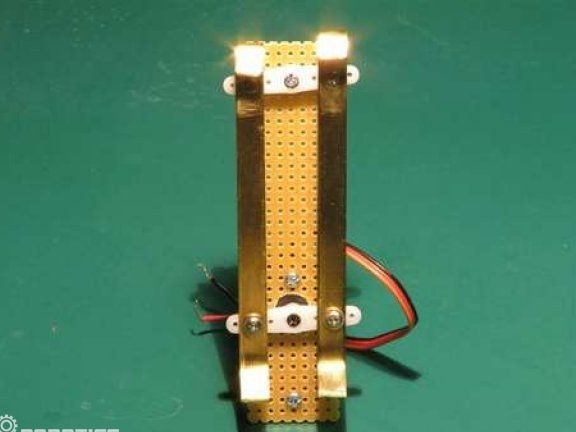
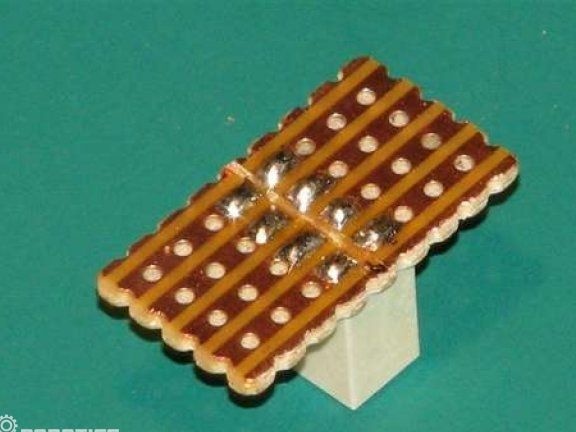
ในบอร์ดทำงานคุณต้องเจาะหลายรูแล้วติดตั้งรีเลย์ที่ด้านหลังของแบตเตอรี่ใช้สลักเกลียวขนาด 2 มม. เพื่อยึดเซอร์โว
ขาของหุ่นยนต์ทำจากแผ่นทองแดงแข็งด้วยเหตุนี้พวกเขาจะถูกตัดเป็นชิ้น ๆ ตามความยาวและโค้งงอเป็นครั้งแรก ด้วยการโก่งตัวหุ่นยนต์จะเกาะติดกับถนนและคลาน ยึดแผ่นด้วยสกรูขนาดเล็ก


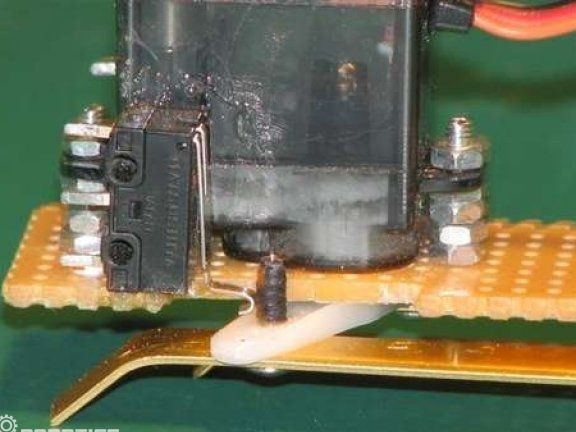
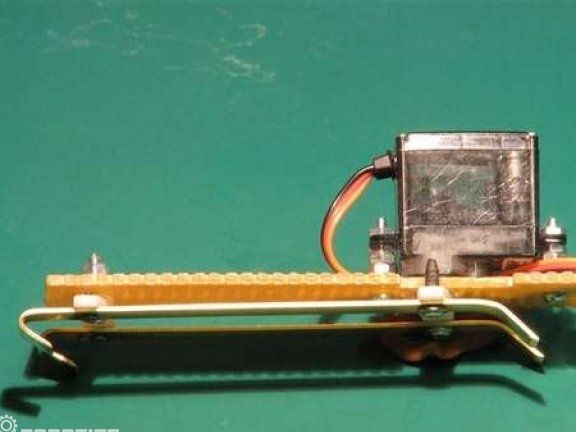
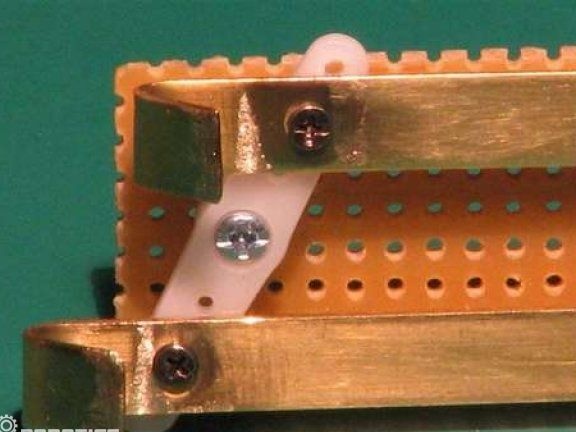
ในการควบคุมขาคุณต้องตั้งสวิตช์ พวกเขาจะติดกับ servomotor ด้วยกาว
ขั้นตอนที่สาม วงจรอิเล็กทรอนิกส์หุ่นยนต์
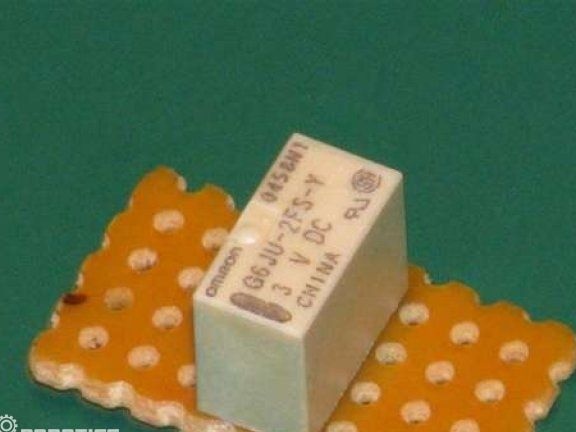
ส่วนประกอบหลักในการทำงานของโฮมเมดถือได้ว่ารีเลย์สลักซึ่งจะทำงานเมื่อตัดการเชื่อมต่อจากขดลวด รีเลย์จะเปลี่ยนการเคลื่อนที่ แต่จะยังคงอยู่ในที่เดียวจนกระทั่งถึงรอบต่อไป
พัลส์ไปยังคอยส์จะมาจากสองไมโครสวิตช์พวกเขาจะเปิดเมื่อรีเลย์ของเสาอากาศโดนสวิตช์

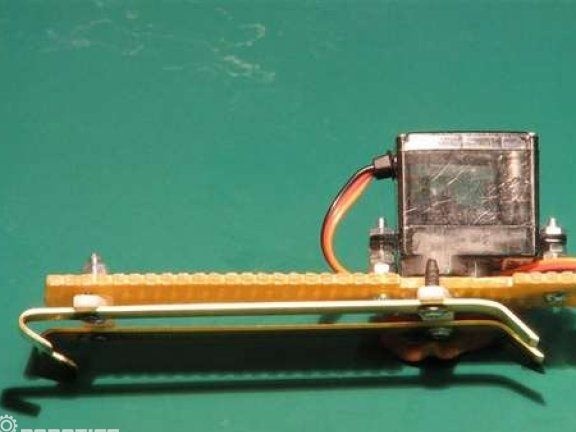
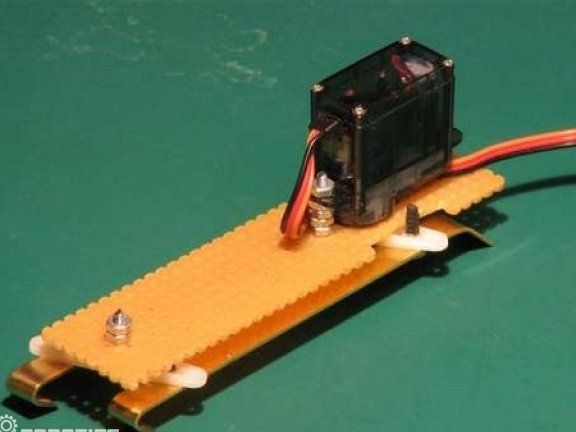
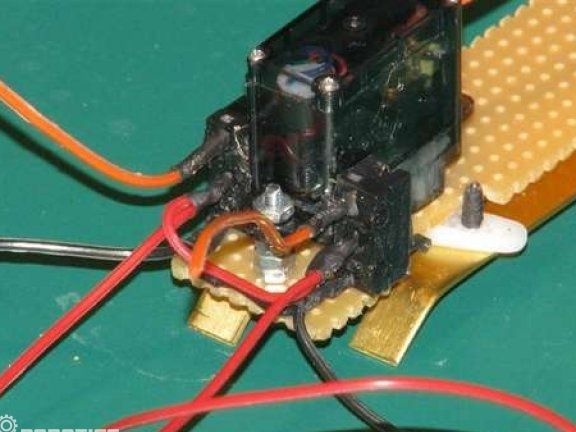
ขั้นตอนที่สี่ การประกอบชิ้นส่วนอิเล็กทรอนิกส์
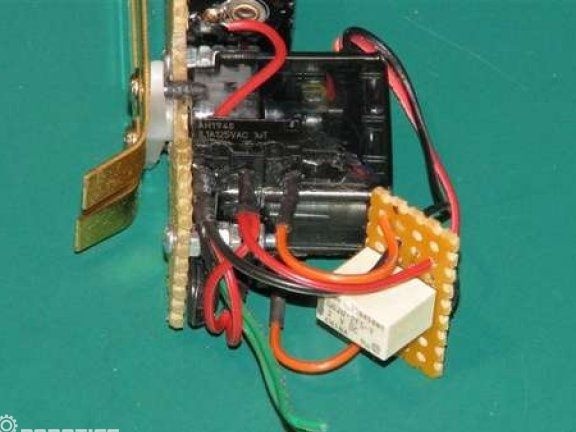
รีเลย์ติดตั้งบนเศษบนแผ่นจึงง่ายที่สุดในการเชื่อมต่อ กระบวนการทั้งหมดของการเชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์นั้นแสดงไว้ในรูปภาพ





ตอนนี้หุ่นยนต์ก็พร้อม เหนือสิ่งอื่นใดเขาจะปรากฏตัวเองบนพื้นผิวพรมเนื่องจากได้รับการออกแบบมาโดยเฉพาะสำหรับสถานที่ดังกล่าว ก่อนอื่นหุ่นยนต์ควรติดไฟ LED จากนั้นหุ่นจะคลานไปตามพื้นอย่างช้าๆ