

ต้องการต่อสู้ระหว่างหุ่นยนต์แมงมุมหรือไม่? จากนั้นศึกษาบทความนี้อย่างถี่ถ้วนในนั้นอาจารย์จะบอกวิธีทำแมงมุมดังกล่าว และเพื่อความชัดเจนในการทำงานของเขาเรามาดูวิดีโอ
เครื่องมือและวัสดุ:
สำหรับแมงมุม
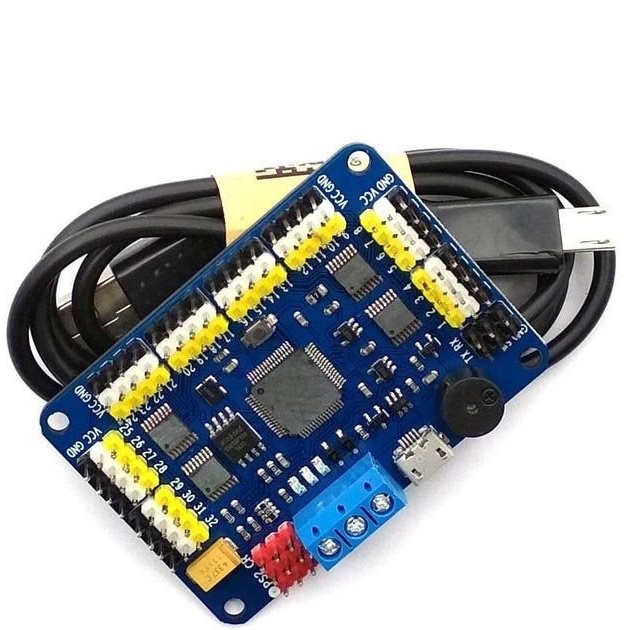
เซอร์โวคอนโทรลเลอร์ 32 ช่อง
-Wemos D1 Mini controller;
- ไดรฟ์เซอร์โว MG90S - 18 ชิ้น;
-Ubec 6A 5V ตัวควบคุม;
- ตัวแปลงบั๊ก DC-DC;
- จัมเปอร์;
-Akkumulyator;
สำหรับหอคอย
- เครื่องยนต์สองเครื่อง;
- โมดูลพลังงาน
- ลดการแปลง;
-Servoprivod;
เครื่องพิมพ์ 3D;
- ปืนสีฟ้า;
-Kley;
- ไขควง
-Krepezh;
- เทปสองด้าน
-Kusachki;
-Nozh;
-Nadfili;
- ลูกบอลพลาสติก
- อุปกรณ์เสริมสำหรับทิ้ง;






ขั้นตอนที่หนึ่ง: ชิ้นส่วนการพิมพ์
ก่อนอื่นคุณต้องพิมพ์รายละเอียดของร่างกายและขาบนเครื่องพิมพ์ 3D คุณสามารถดาวน์โหลดไฟล์สำหรับพิมพ์ได้ ลิงค์.


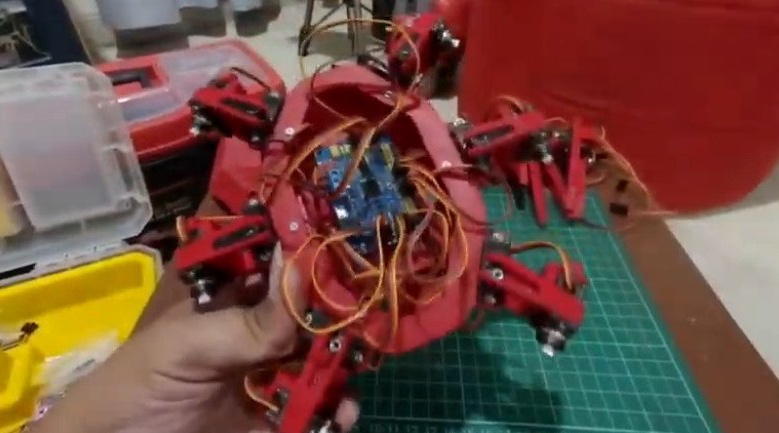
ขั้นตอนที่สอง: สร้าง
ตอนนี้คุณต้องรวบรวม robopauk
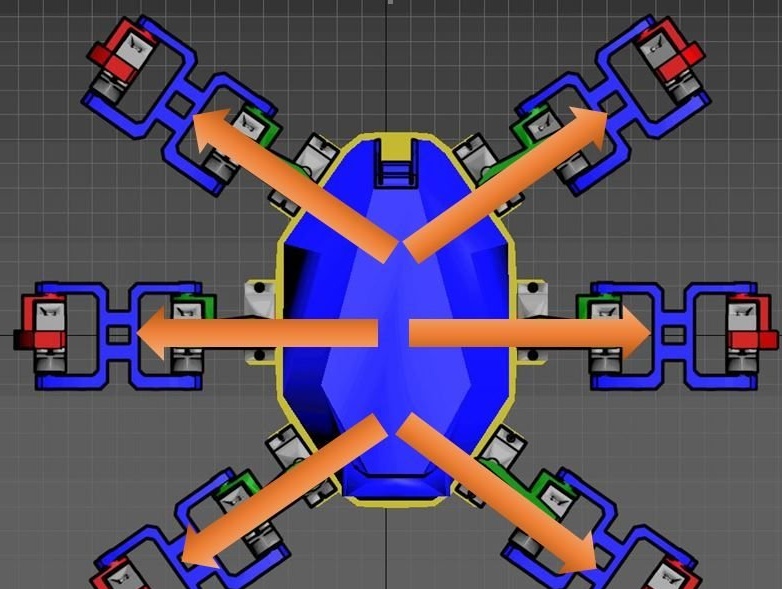
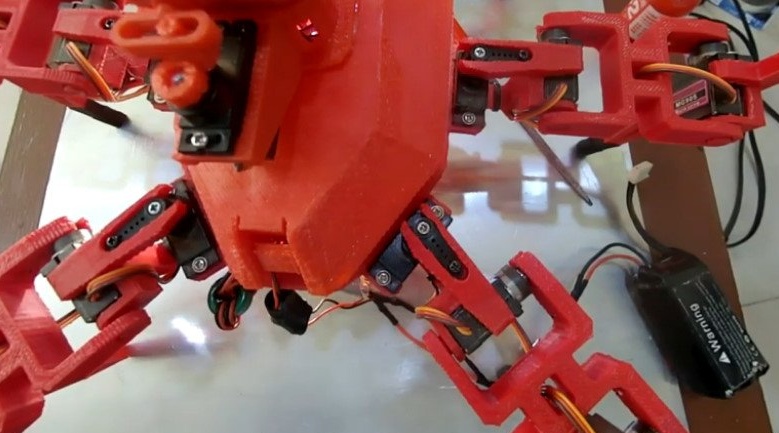
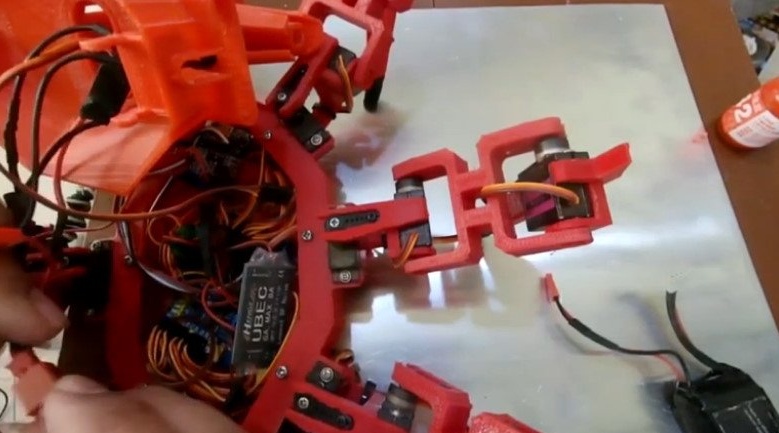
อาจารย์ติดตั้งเซอร์โวบนข้อต่อของขาแมงมุม โดยรวมแล้วหุ่นยนต์มีหกขาและสามเซอร์โวในแต่ละขา








ติดตั้งเซอร์โวบนแพลตฟอร์มแชสซี




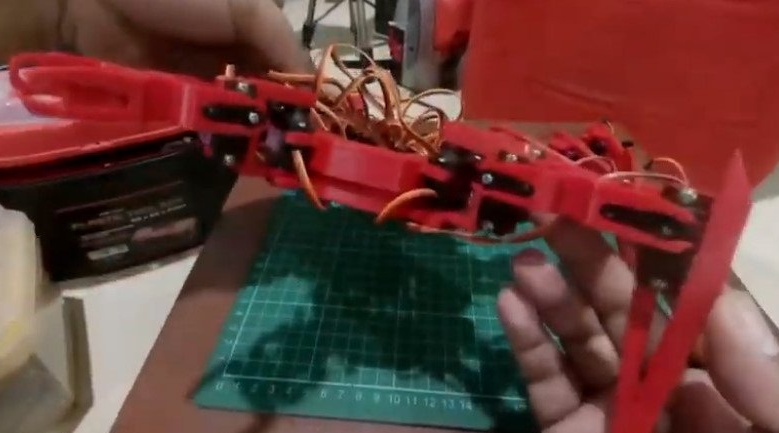
ยึดข้อต่อแรกของขากับเซอร์โวแพลตฟอร์ม




สายไฟถูกดึงเข้าไปในรูเทคโนโลยีและเชื่อมต่อกับคอนโทรลเลอร์





ติดตั้งสตับ


ติดตั้งข้อต่อที่สองของขา เชื่อมต่อสายไฟจากเซอร์โวเข้ากับคอนโทรลเลอร์






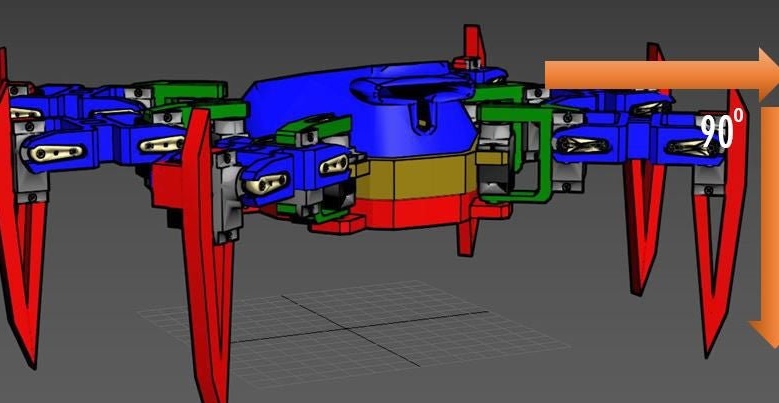
ติดตั้งข้อต่อที่สาม ด้วยข้อต่อนี้แมงมุมจะเกาะติดกับพื้นผิวเมื่อเคลื่อนไหว



เชื่อมต่อและตรวจสอบการทำงานของไดรฟ์แต่ละเซอร์โว



หากทุกอย่างปกติแก้ไขสายไฟด้วยความสัมพันธ์ติดตั้งแบตเตอรี่และปิดฝาครอบ



กระบวนการสร้างสามารถเห็นได้ในวิดีโอ
ขั้นตอนที่สาม: เกี่ยวกับ อิเล็กทรอนิกส์
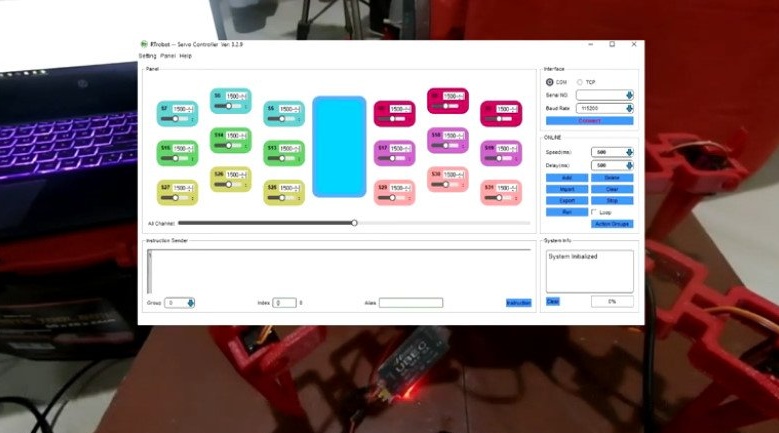
ตัวช่วยสร้างใช้ตัวควบคุมเซอร์โว RTrobot เพื่อควบคุมการเคลื่อนไหว สามารถดาวน์โหลดโปรแกรมการจัดการ ที่นี่ หรือ ที่นี่.
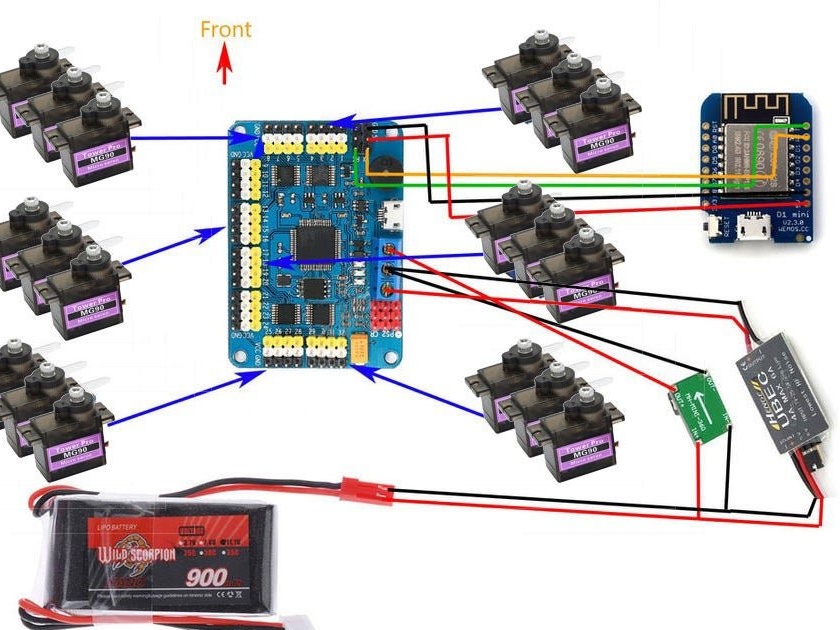
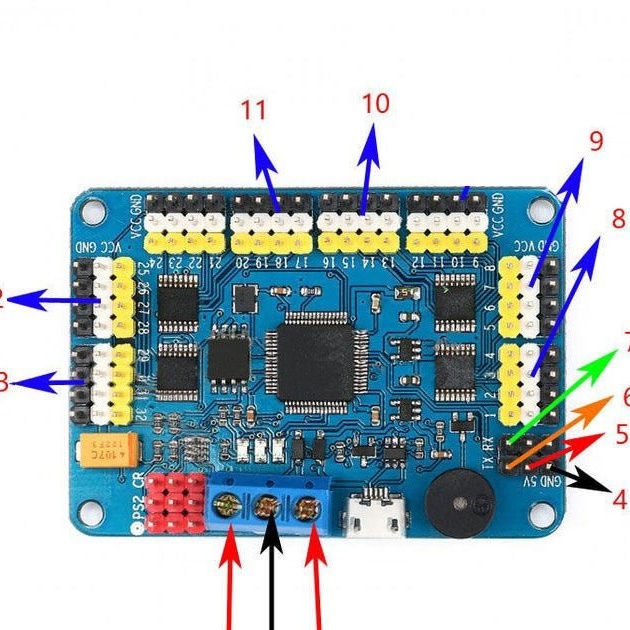
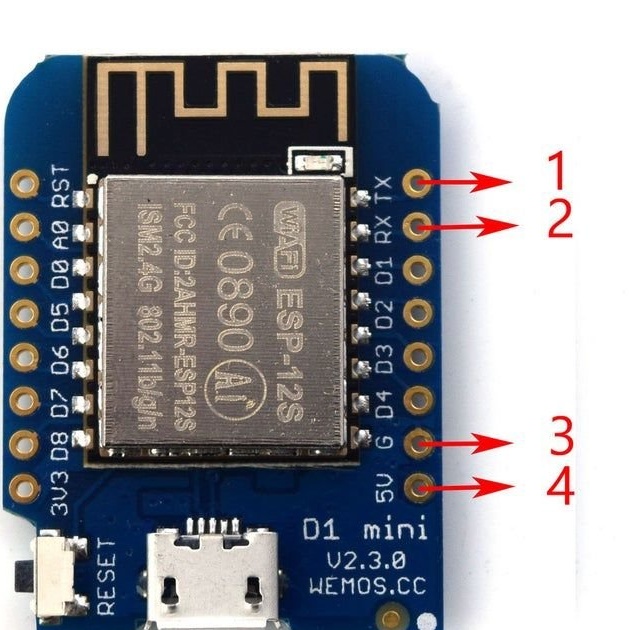
ทุกอย่างเชื่อมต่อดังนี้:
1. เอาต์พุต 5V (+) UBEC
2. Earth จาก UBEC และตัวแปลงบั๊ก
3. 5 V แหล่งจ่ายไฟ (+) จากตัวแปลง
4. บนพิน Wemos D1 mini G
5. ถึง Wemos 5v
6. ถึง Wemos D1 RX
7. Wemos TX
ไดรฟ์ Servo เชื่อมต่อกับพิน 8 ถึง 13
ติดตั้งรหัสบน NodeMCU คุณสามารถดาวน์โหลดได้ ที่นี่.
WeMos D1 mini เป็นการ์ด Wi-Fi ขั้นต่ำ ESP8266
ใช้ wemos D1 mini เป็นจุดเข้าใช้งาน WIFI คุณสามารถส่งคำสั่งอนุกรมไปยังคอนโทรลเลอร์เซอร์โว สิ่งที่จำเป็นต้องมีก็คือการแฟลชบอร์ด nodeMCU ด้วยรหัสและคุณสามารถเชื่อมต่อสมาร์ทโฟนกับ nodeMCU AP จากนั้นใช้เว็บเบราว์เซอร์ไปที่ http://192.168.4.1
มันเป็นสิ่งสำคัญ
เมื่อคุณเปิดเซอร์โวเซอร์โวทั้งหมดจะย้ายไปที่ตำแหน่งเดิม / มาตรฐาน
ติดตั้งเซอร์โวอย่างแม่นยำที่สุดเท่าที่จะทำได้ดังแสดงในรูปด้านบนหรือในวิดีโอ
ปรับตำแหน่งของข้อต่อปิดและเปิดอุปกรณ์อีกครั้งเพื่อให้แน่ใจว่าขาทั้งหมดอยู่ในตำแหน่งที่ถูกต้อง
หากข้อต่อเกาะติดถูให้ปรับตำแหน่ง
ขั้นตอนที่สี่: หอคอย
ตอนนี้เราหันไปที่การชุมนุมของหอคอย
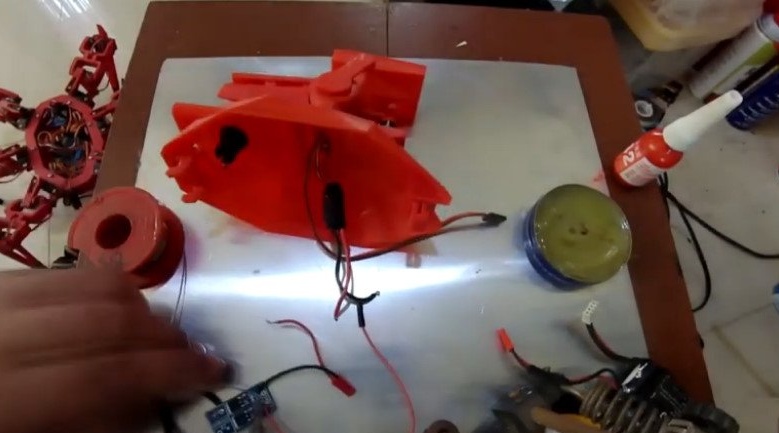
ก่อนอื่นต้องพิมพ์รายละเอียดของหอคอย คุณสามารถดาวน์โหลดไฟล์ได้ที่นี่ ลิงค์.
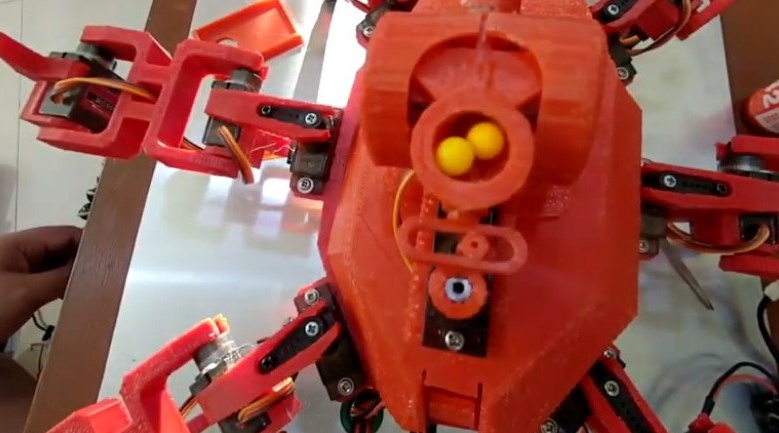
จากนั้นเจ้านายจะประกอบหอคอย วงจรสำหรับหมุนหอคอยและเชื่อมต่อชิ้นส่วนไฟฟ้าอยู่ด้านล่าง
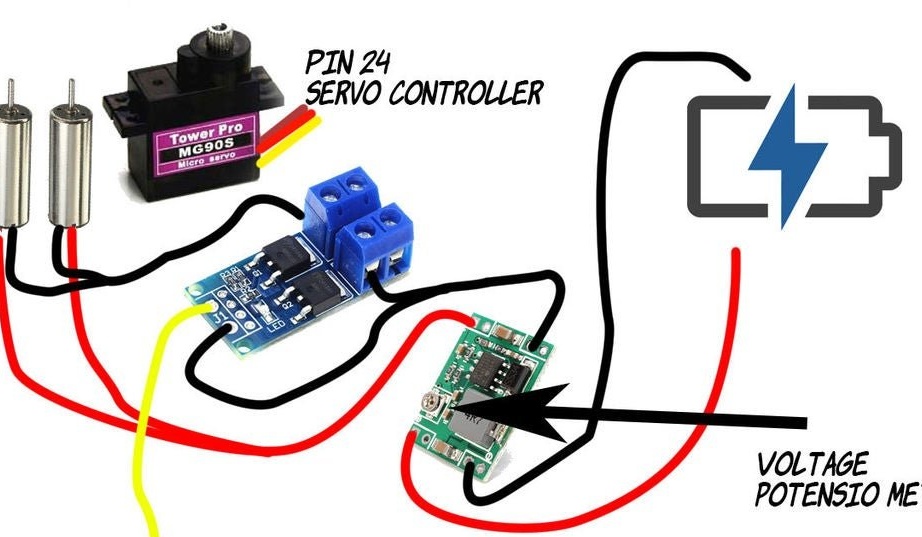
ติดตั้งเซอร์โวบนหอคอย







เทปสองด้านเกาะติดกับลูกกลิ้ง


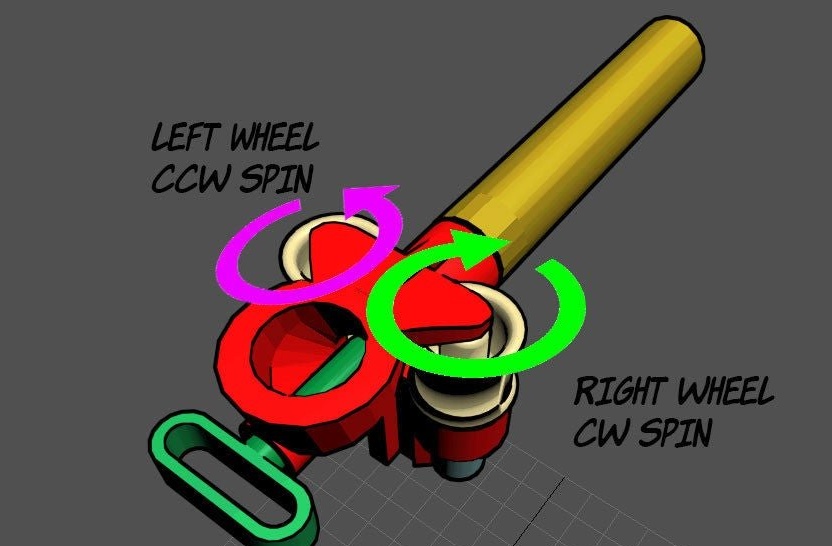
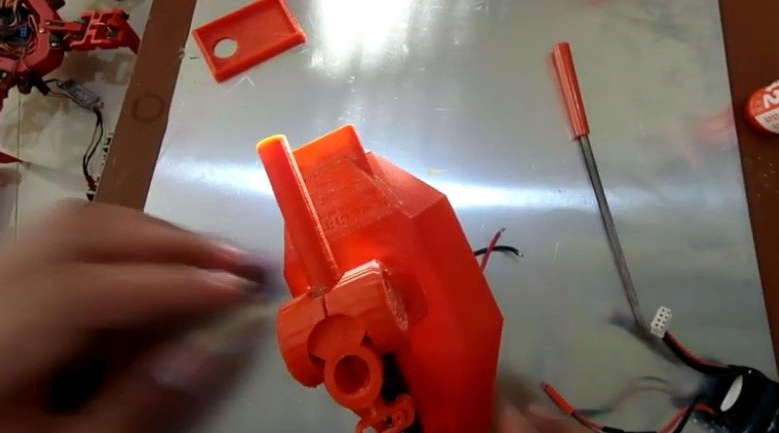
รวบรวมปืน ติดตั้งมอเตอร์ในที่ยึด ติดตั้งลูกกลิ้งบนเพลามอเตอร์








เชื่อมต่อสายไฟและรวบรวมหอคอย




โหลดกระสุนและตรวจสอบการทำงานของปืน กลไกสามารถปรับได้โดยการเลื่อนที่ยึดบนเซอร์โวเพลา


มันทำให้การเชื่อมต่อสุดท้ายประกอบและตรวจสอบ




วิดีโอที่มีการชุมนุมของหอคอยสามารถดูได้ด้านล่าง
ทุกอย่างพร้อมแล้ว รวบรวม Robopauk อีกหนึ่งตัวและคุณสามารถต่อสู้ได้
