


เพิ่งนำเขยพ่อของลูกหลานของฉันบางคนมา โรงรถ รถยนต์ไฟฟ้าสำหรับเด็กที่ค่อนข้างตี (ต่อไปนี้จะเรียกว่าเครื่อง) เพื่อให้กฎจราจรที่อายุน้อยที่สุด เขาเป็นแขนกลเริ่มกลไกและช่างไฟนั่นคือสาเหตุที่เขาหันมาหาฉัน - เมื่อเริ่มออกมีกระตุกที่แหลมคมกระตุกหัวตัวน้อย เขารู้ว่าไม่กี่ปีที่ผ่านมาฉันติดตั้ง starters นุ่ม ๆ ในรถยนต์ซึ่งเช่าในสวนสาธารณะในวันหยุดสุดสัปดาห์ (และไม่เพียง แต่ใกล้กับทุกห้างสรรพสินค้าใหญ่ ๆ ) เด็ก ๆ ไปขับรถและตบฉัน วิธีปฏิบัติที่ดีที่สุดยังคงอยู่ทำไมล่ะ
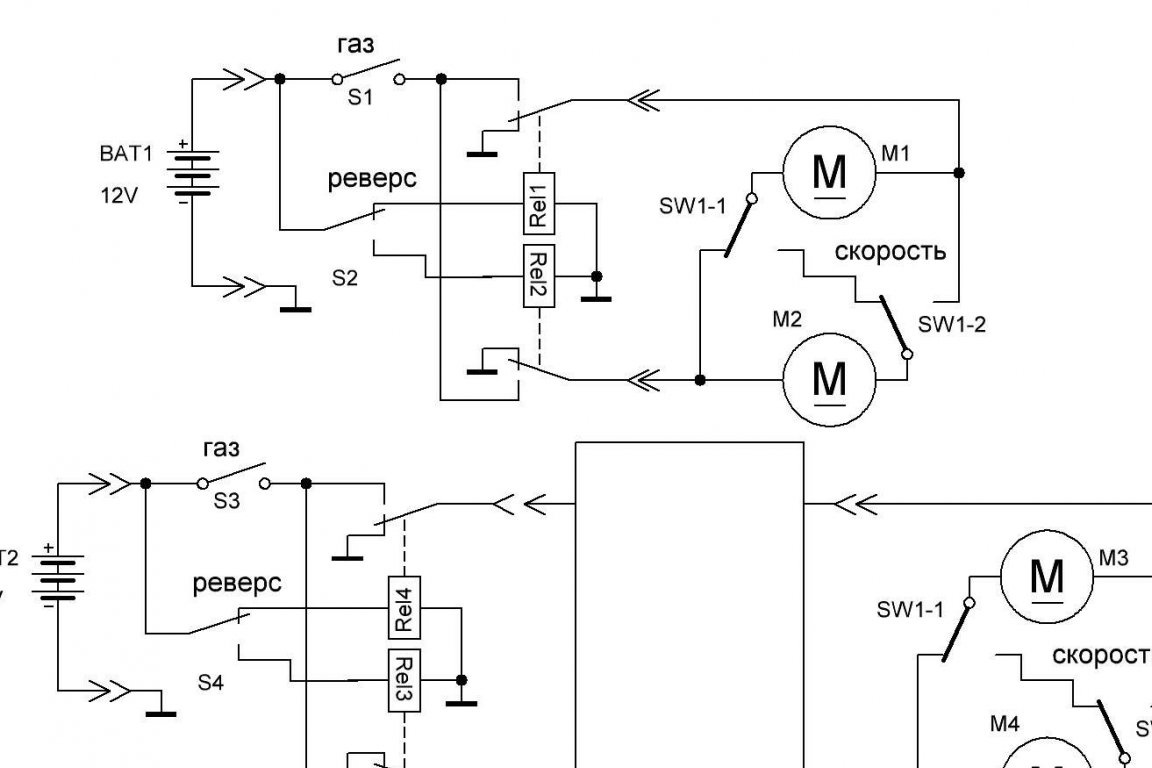
เครื่องของชั้นนี้มี:
- "แก๊ส", คันเหยียบ, สวิตช์โดยไม่มีการดัดแปลง;
-“ กล่อง” สวิตช์ช้าเร็วเปิดเครื่องยนต์ทั้งสองแบบขนาน (เร็ว) หรือต่อเนื่อง (ช้า);
- "ย้อนกลับ" สลับขั้วของแรงดันที่จ่ายให้กับมอเตอร์ นั่นคือทั้งหมดที่ แม้แต่รถยนต์ที่ควบคุมบลูทู ธ ก็มีบล็อกไดอะแกรมเหมือนกัน มีตัวเลือกสำหรับการใช้รีเลย์สำหรับ PWM แต่อย่างที่ภาพยนตร์เรื่องหนึ่งพูดว่า: "นี่ไม่ร้ายแรง!" ดังนั้นรูปแบบที่ง่ายมากจะมีลักษณะเช่นนี้ ใกล้เคียงคือการรวมของโมดูลของเรา
อะไรคือโมดูลของโมดูลของเรา? นี่คือสวิตช์ทรานซิสเตอร์พลังงาน (มันซับซ้อนเกินไปกับไทริสเตอร์กระแสตรง) ซึ่งควบคุมโดยเครื่องกำเนิด PWM และรีเลย์เวลา (RV) ซึ่งหลังจากเร่งความเร็ว (5 ... 10 วินาทีหลังจากเริ่มต้น) ติดต่อกับรีเลย์ไฟฟ้าด้วยสวิตช์ลัดวงจรเพื่อลดการสูญเสียและการขนถ่าย กุญแจ
หลักการทำงานของเครื่องกำเนิด PWM อธิบายไว้ในแผนภาพนี้
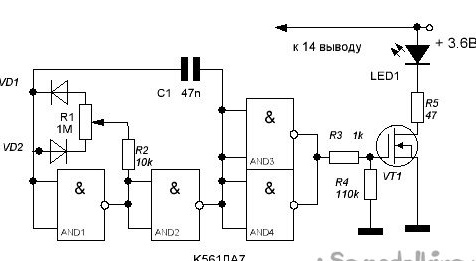
ห่วงโซ่ความถี่ประกอบด้วย C1 และ R1 และอัตราส่วนคือบันทึก 1 และ 0 - รอบการทำงาน - จากตำแหน่งของตัวเลื่อน R1 แม่นยำยิ่งขึ้นจากอัตราส่วนของความต้านทานของส่วนบนและส่วนล่างของตัวต้านทาน ชิ้นส่วนเหล่านี้ควบคุมความเร็วของประจุหรือคายประจุของตัวเก็บประจุขึ้นอยู่กับไดโอด เมื่อเท่ากันระยะเวลาของแสงและ "ไม่เรืองแสง" ของ LED จะเท่ากัน ในตำแหน่งใดตำแหน่งหนึ่งที่สุดขีดของแถบเลื่อนจะมีแสงยาวพร้อมกับการสูญพันธุ์ในเวลาสั้น ๆ ในขณะที่อีกหนึ่ง - แฟลชสั้น ๆ
แต่ไดอะแกรมที่แสดงนั้นทำงานได้ดีกับการปรับด้วยตนเองสำหรับเป้าหมายของเรา - เริ่มต้นอ่อน - ควรใช้ตัวจับเวลา NE555 (ต่อจากนี้เป็นเพียงตัวจับเวลา) "แหลม" โดยเฉพาะสำหรับโหมดดังกล่าว อะนาล็อกในประเทศของ KR1006VI1, อะนาล็อกอื่น ๆ : มันไม่มีเหตุผลที่จะให้คำอธิบายแบบเต็มมีหนังสืออ้างอิง แต่สาระสำคัญคือมันมีอินพุต“ การควบคุม” (CTRL), microcircuit 5 ขา นี่คือคำอธิบายจาก Radiokota:
…
ฉันจะเพิ่มจากตัวเองว่าถ้าแรงดันไฟฟ้าที่ขาที่ 5 มีค่าเท่ากับหรือมากกว่าแรงดันของแหล่งจ่ายพลังงานรุ่นจะพังลงที่เอาต์พุตหนึ่งคีย์จะเปิดเต็มที่ (ซึ่งเป็นสิ่งที่เราต้องการ)
ลองพิจารณารูปแบบที่แท้จริง
วงจรอนุกรมแรกสุดที่ออกแบบและผลิตบนทรานซิสเตอร์แบบไบโพลาร์ (คำว่า "อนุกรม" หมายความว่าฉันทำมากกว่า 10 ชิ้น)
คุณสมบัติของวงจรนี้:
- ทรานซิสเตอร์ที่ทรงพลังจำนวนมาก (KT819 จากนั้น KT863) - ไม่ดีใช้พื้นที่มากร้อน
- ตัวต้านทานปรับแนวมากมาย - แย่มากใช้พื้นที่มากความร้อนสูง
- รีเลย์เวลาบนไทริสเตอร์ - ตัวเก็บประจุขนาดใหญ่ใช้พื้นที่
- หูฟังจำลองการโอเวอร์คล็อกเสียง - ดี แต่กินพื้นที่
นอกจากนี้โครงการผลิตหลัก เราจะพิจารณาในรายละเอียดเพิ่มเติม
ช่วยให้การสตาร์ทเกียร์ถอยหลังเป็นไปอย่างราบรื่น เพื่อประหยัดเงินลูกค้าตกลง เสียงจำลองถูกทอดทิ้ง ทรานซิสเตอร์ภาคสนาม 55N06 ที่ถูกปล่อยออกจากประเทศจีนถูกปฏิเสธ 20% แต่ตัวที่เหลือทำงานได้ดี (การสูญเสียและความร้อนเล็กน้อย) ซึ่งพวกเขาไม่ได้เปิด PB ทันที แต่ปฏิเสธ (ชิ้นส่วน K1, VD4, VT2, C5 และ R5) อัตราเร่งจะถูกกำหนดโดยตัวเก็บประจุ C3 (จาก 1,000.0 ถึง 4700.0 μF) และตัวต้านทาน R1, ค่าเล็กน้อยจะถูกเลือกการทดลอง ไม่ยากที่จะได้รับการ จำกัด หรือความสามารถในการปรับความเร็วนั้นคุณจำเป็นต้องเชื่อมต่อตัวต้านทานตัวแปรหรือการตัดแต่งแบบขนานที่มีค่าประมาณ 10 ... 20 kOhm ตัวเลื่อนซึ่งเชื่อมต่อกับเท้าที่ 5 ของตัวจับเวลา
เมื่อเคลื่อนที่ไปข้างหลังเครื่องหมายบวกและลบจะเปลี่ยนสถานที่พลังงาน 555 จะถูกตัดออกจากไดโอด VD2 กระแสไฟฟ้าของมอเตอร์ผ่านไดโอดที่สร้างขึ้นในสนาม VT1 ซึ่งกระแสที่ได้รับอนุญาตนั้นเหมือนกับโครงสร้างหลัก ตัวต้านทาน R8 ที่ต่ออยู่ในซีรีย์ด้วย VD3 ไดโอดทำให้หมาด ๆ มีผลเพียงเล็กน้อยต่อคุณสมบัติการหน่วงของมัน แต่ปกป้องมันจากการโอเวอร์โหลดในระหว่างการถอยหลัง ตัวจับเวลาที่นี่เปิดใช้งานตามรูปแบบที่ผิดปกติมีรายละเอียดน้อยลงฟังก์ชั่นเหมือนกัน กำลังจ่ายให้กับตัวจับเวลาผ่านตัวต้านทาน R3 ไม่เพียง แต่เพื่อปรับปรุงการกรองพลังงาน แต่ส่วนใหญ่เพื่อสร้างแรงดันเกินที่ขา 5 เหนือแหล่งจ่ายแรงดันของตัวจับเวลาเพื่อ“ เสียบ” ในตำแหน่งที่ต้องการ ค่าของมันเมื่อใช้ analogs ของตัวจับเวลาอาจแตกต่างกันอย่างมากเนื่องจากการบริโภคในปัจจุบัน ตัวต้านทาน R6 และไดโอด VD2 และ VD4 - สำหรับการปล่อยประจุตัวเก็บประจุแบบตั้งเวลา C3 และ C5 เมื่อปิดเครื่อง เพื่อกำจัดการหยุดชั่วคราวเมื่อเริ่มต้นระหว่างลบ C3 และลบด้วยพาวเวอร์ซัพพลายตัวต้านทานการตัดแต่งของคำสั่ง 1 kΩที่ไม่ได้ระบุไว้ในแผนภาพสามารถติดตั้งได้ ใช้ในผลิตภัณฑ์ที่อธิบายไว้ ความถี่ในการสร้างถูกกำหนดโดย C2 และ R2 ที่ค่าเหล่านี้ประมาณ 300 ... 500 Hz เครื่องจำลองเสียงให้การจำลองการเร่งความเร็วที่เหมาะสม สำหรับการเร่งความเร็วที่ราบรื่นยิ่งขึ้น C3 สามารถเพิ่มเป็น 4700.0 uF
และวงจรที่มีสตาร์ทนุ่มทั้งสองทิศทาง คุณสมบัติที่สำคัญ:
- ทรานซิสเตอร์สองสวิตช์ 55N06
- การรวมตัวจับเวลาผ่านสะพานไดโอดเมื่อใดก็ตามที่มีการเชื่อมต่อพลังงานจะเข้ามาในขั้วที่ถูกต้อง
- เพราะ แรงดันไฟฟ้าตกบนไดโอดในตัวของ fieldman ที่ไม่ทำงานจะสังเกตเห็นได้จำเป็นต้องใช้ PB เชื่อมต่อผ่านสะพานและมีกลุ่มการปิดสองกลุ่ม
- แดมเปอร์ - ตัวเก็บประจุแทนไดโอด
คุณสามารถใช้แรงดันไฟฟ้าในขั้วใด ๆ - เครื่องยนต์จะเร่งอย่างราบรื่นในทิศทางที่ถูกต้อง
ตามรูปแบบนี้เราจะรวบรวมผลิตภัณฑ์ของเรา
เล็กน้อยเกี่ยวกับแรงดันไฟฟ้า ฉันต้องจัดการกับระบบ 6, 12, 18 และ 24 โวลต์ 6B - พลังงานต่ำล้าสมัยมันจำเป็นต้องใส่รีเลย์ 5 โวลต์ที่หายาก โดยทั่วไป 12 โวลต์สำหรับ 18 และ 24 โวลต์คุณจะต้องตั้งค่าไดโอดซีเนอร์บนตัวจับเวลา (เช่นในวงจรแรกหรือชิปประเภท 7812) ที่ 24 โวลต์เร็วที่สุดบางครั้งเมื่อมีการหมุนใหญ่การหยุดแบบเร่งต้องใช้เบรกนี่ไม่ใช่เรื่องยาก
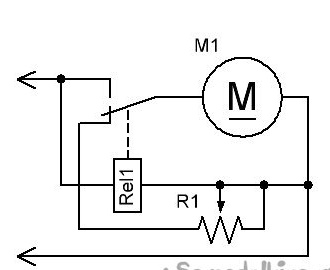
เมื่อปิดสวิตช์รีเลย์จะทำให้มอเตอร์สั้นลง (เบรกแบบไดนามิก) ผ่านตัวต้านทานการตัดลวดแบบ R1 ที่มีค่าหลายสิบโอห์มซึ่งเลือกความเข้มของการเบรก
เราผ่านการผลิต
มีร่างกายเป็น การปรับแต่งเล็กน้อยเพื่อแยกอวัยวะที่ไม่จำเป็นออก

ช่องว่าง PCB ถูกเก็บรักษาไว้ไม่จำเป็นต้องเป็นพิษ
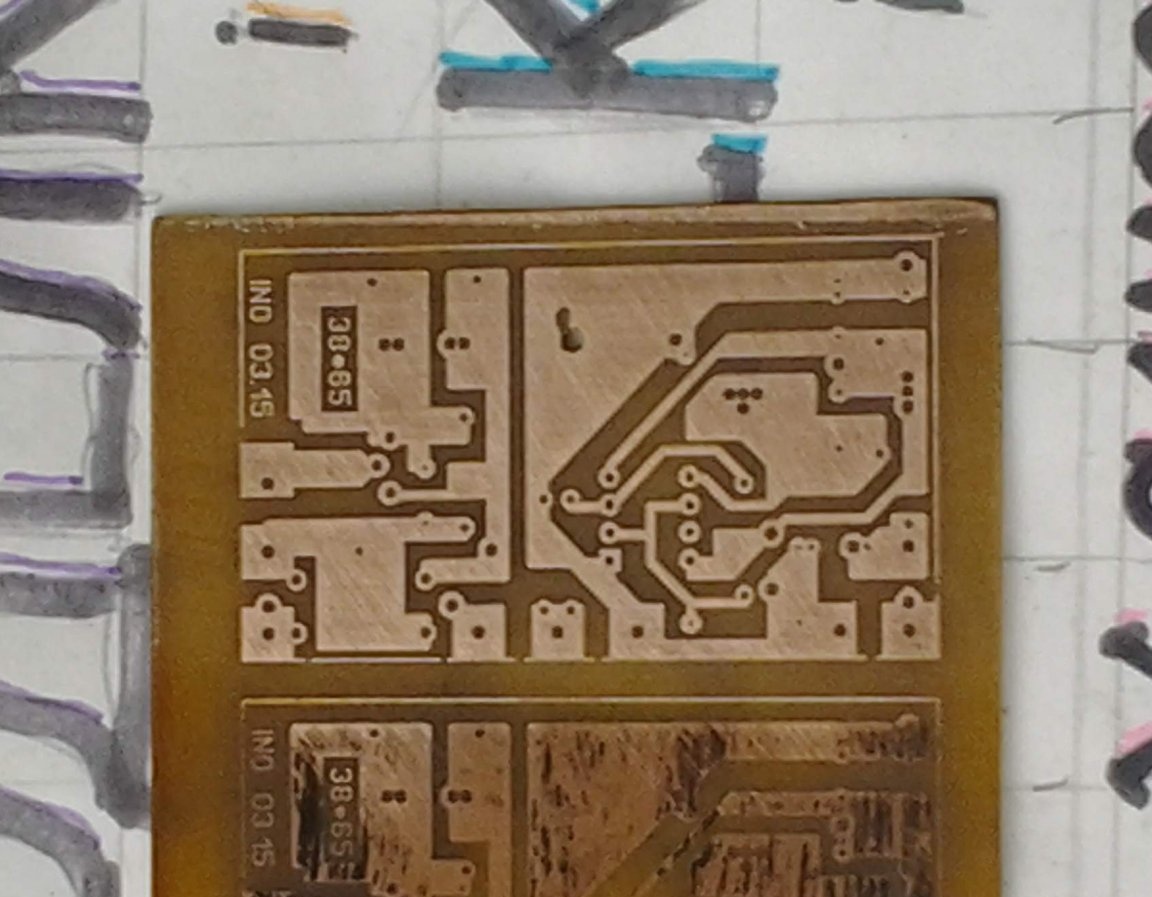
เราสะอาดบด
เราเริ่มบรรจุบอร์ดพร้อมรายละเอียด
แล้วดันเข้าไปในกล่อง
โดยธรรมชาติแล้วไม่ใช่ทุกอย่างไปได้ทันที แต่ด้วยความช่วยเหลือของคุณเองคุณก็จะรู้ว่าผลิตภัณฑ์ยังคงประกอบอยู่
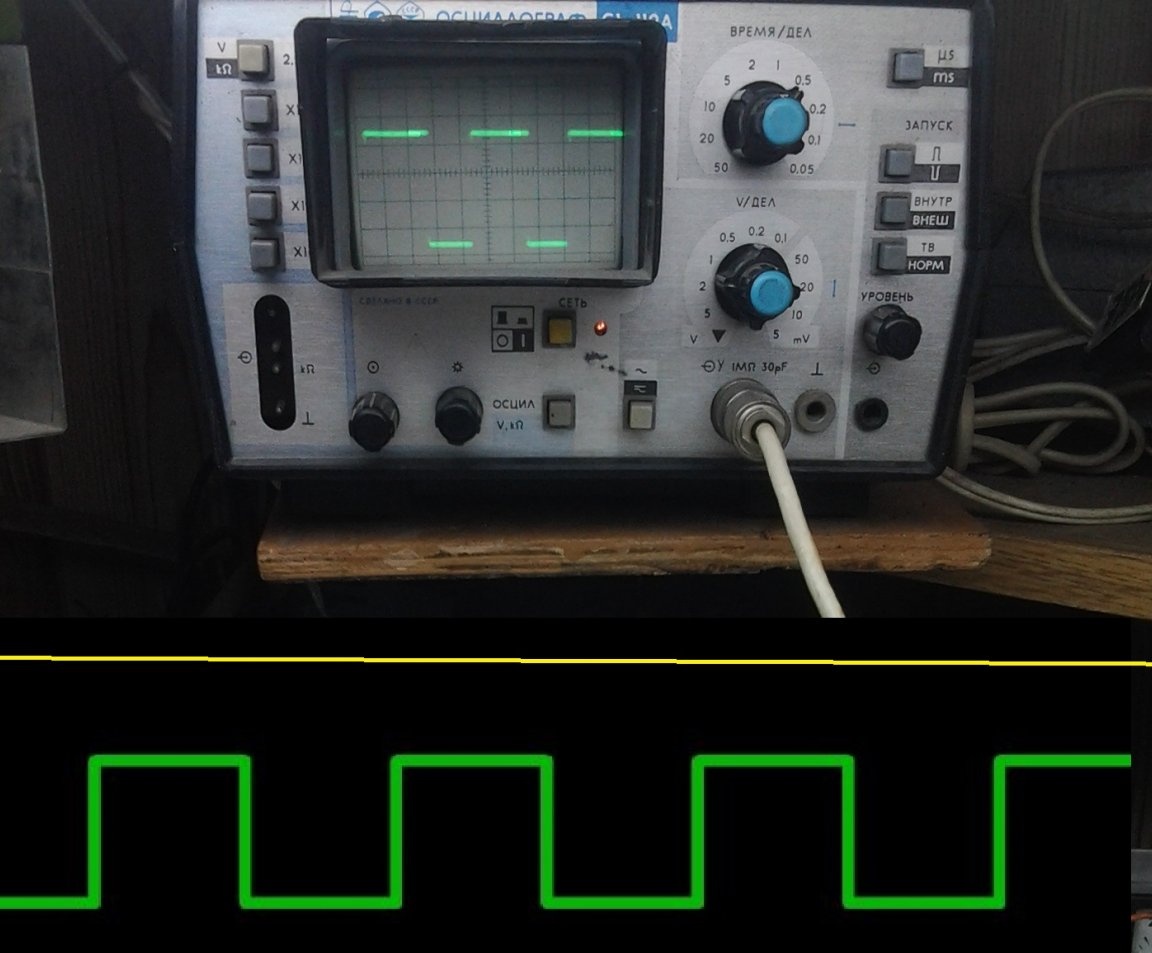
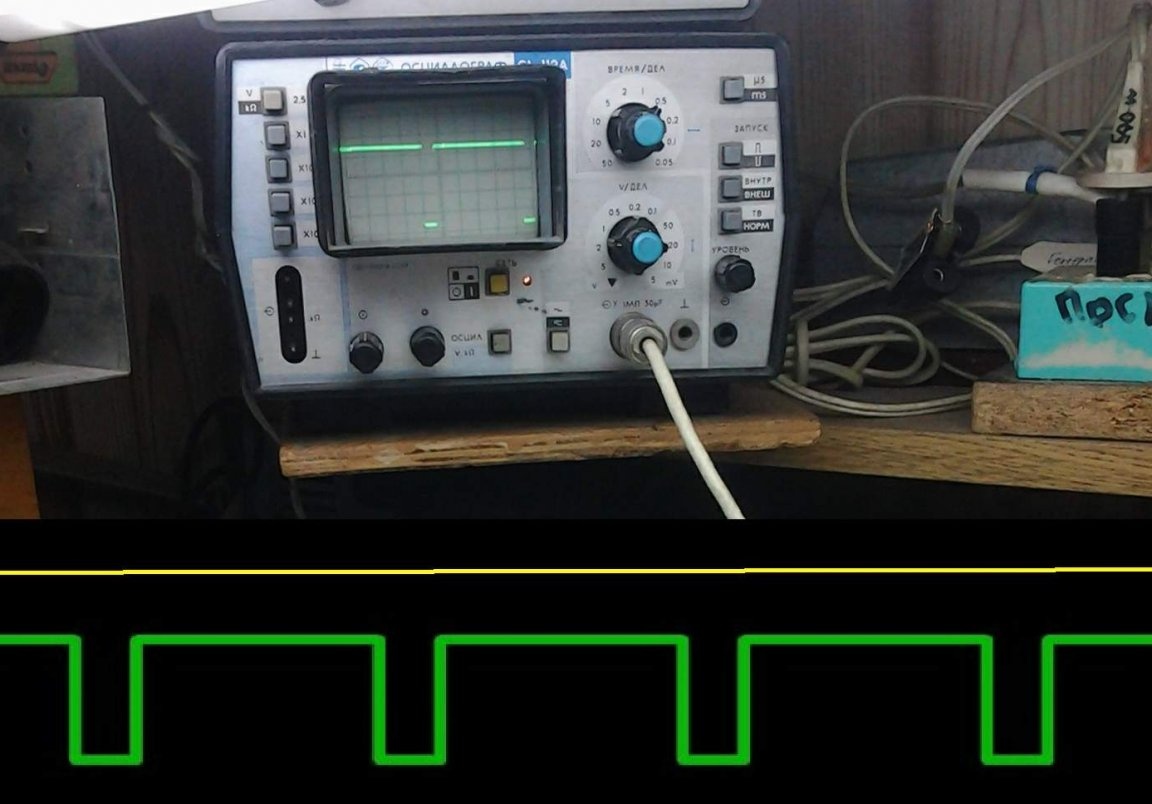
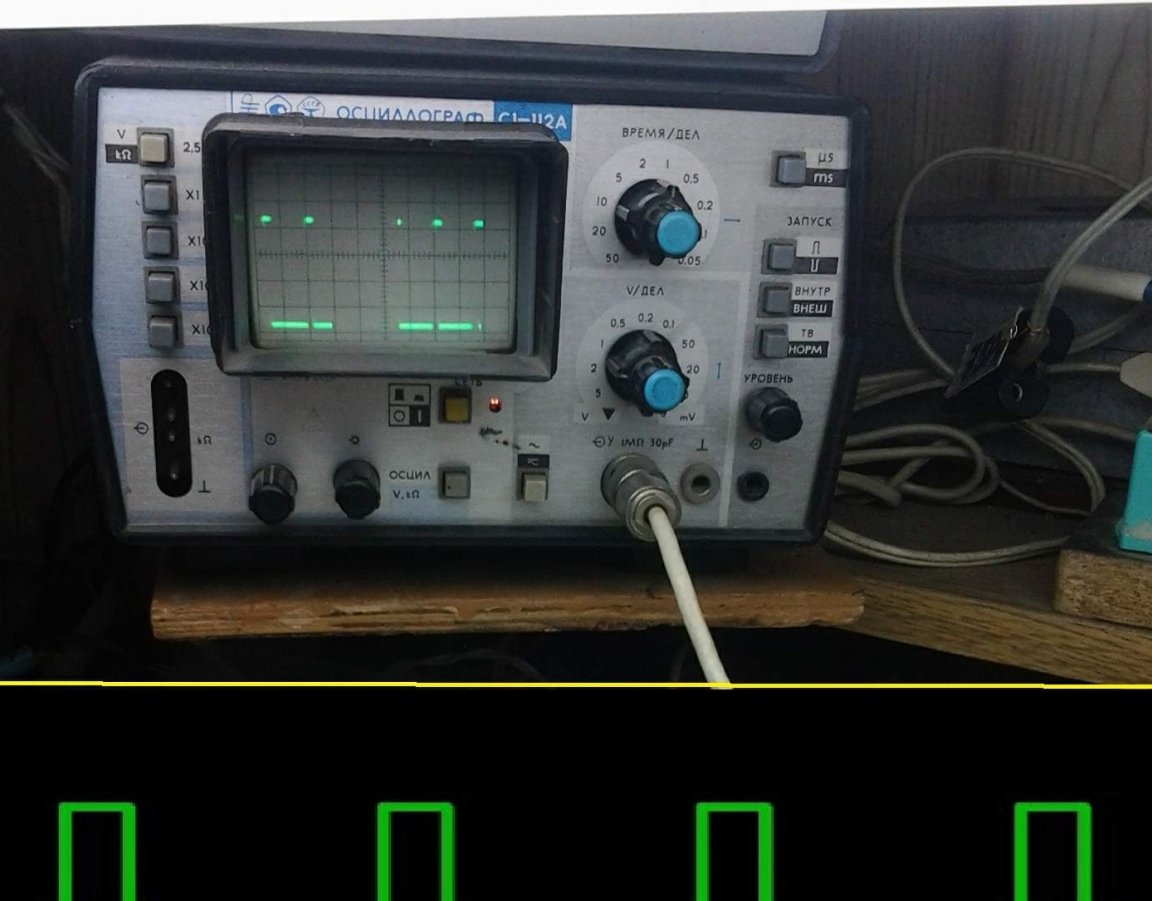
ตอนนี้ยิงวิดีโอและแทรก
จุดเริ่มต้นของเครื่องยนต์จะแสดงโดยตรงและผ่านผลิตภัณฑ์ของเราเพียง 50 วินาที
และเพิ่มเติมเกี่ยวกับตัวเลือกสำหรับโครงร่างเหล่านี้ หากเป็นที่น่าสนใจเราจะหารือ
วงจรกำลังสูง 1.5 kW ที่ 48 V (วงจรไม่สมบูรณ์)
เครื่องปรับแรงดันไฟฟ้าสูงมีฟังก์ชั่นที่ยุ่งยาก
เครื่องควบคุมการป้อนลวดในงานเชื่อม PA
นั่นคือทั้งหมดที่แสดงความคิดเห็น