ในบทความนี้เราจะได้พบกับสิ่งที่น่าสนใจ homebrew กิ่ง - อุปกรณ์ที่ดึงและเขียนข้อความแบบเรียลไทม์ควบคุมผ่านอุปกรณ์ Android ใด ๆ
ลองดูวิดีโอสั้น ๆ พร้อมตัวอย่างของการทำงานของอุปกรณ์
เครื่องมือและวัสดุ:
-Arduino Uno R3;
- โมดูลบลูทู ธ HC-05;
- ไดรฟ์เซอร์โว MG90S - 2 ชิ้น;
Servo SG90;
- ควบคุมแรงดันไฟฟ้ากระแสตรง LM2596;
-3.7V 18650 แบตเตอรี่ - 2 ชิ้น;
- ที่ใส่แบตเตอรี่ 18650
- ท่ออลูมิเนียมขนาดเล็ก (จากเสาอากาศ FM เก่า);
-Akril;
-Krepezh;
- อุปกรณ์ทำความเย็น;
เครื่องพิมพ์ 3D;
- ปากกาลูกลื่น
-Smartfon;


ขั้นตอนที่หนึ่ง: ขั้นตอนการออกแบบบางอย่าง
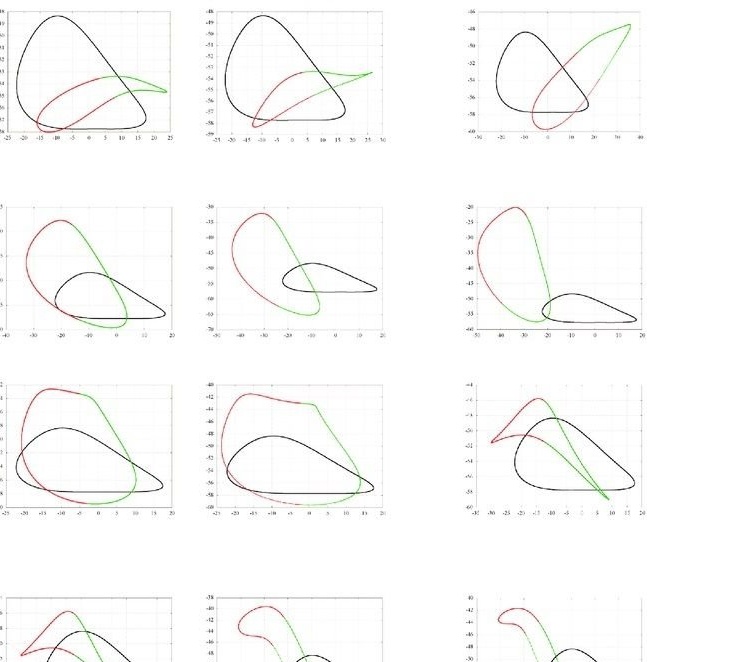
ในขั้นตอนนี้ตัวช่วยสร้างอธิบายด้วยตัวอย่างวิธีการคำนวณขนาดของไดรฟ์และตำแหน่งการติดตั้งของเซอร์โว
ภาพ 1
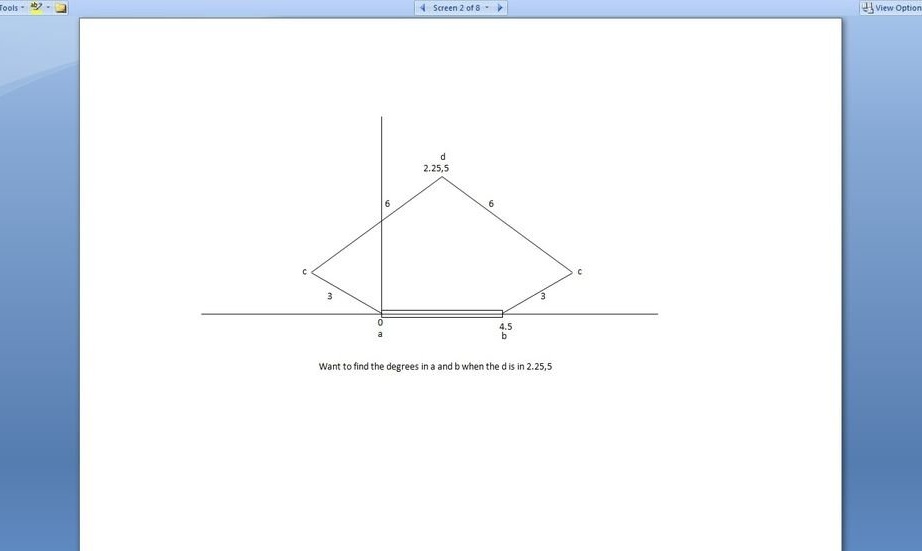
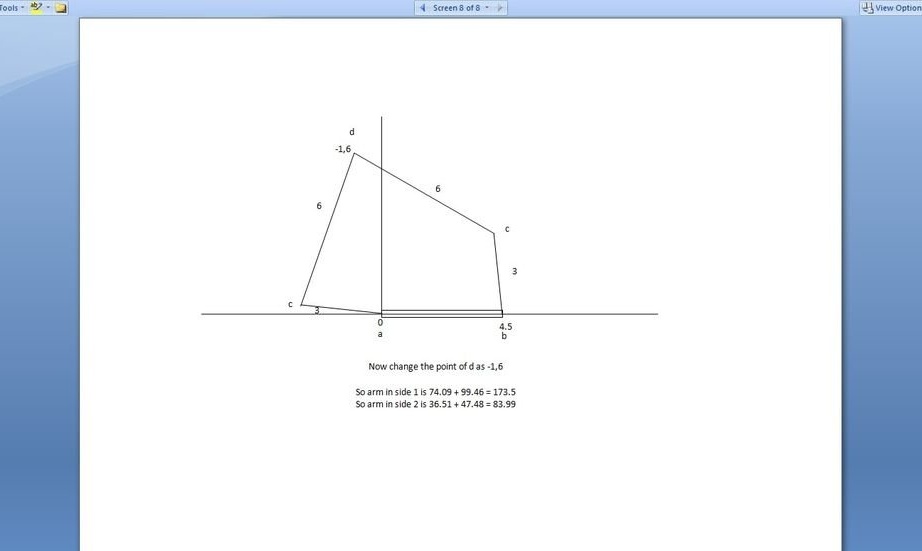
ขนาดของแขนส่วนล่างคือ 3 ซม., แขนส่วนบนคือ 6 ซม. ระยะห่างระหว่างคันทั้งสองของเซอร์โวคือ 4.5 ซม. ดังนั้นเราจะพิจารณาทั้งหมดนี้ในกราฟและทำเครื่องหมายศูนย์เซอร์โวแรกเป็น 0.0, 4.5.0 ที่สอง
ภาพที่ 2
ตอนนี้ทำเครื่องหมายจุดบนกราฟที่จะต้องย้ายคัน 2.25.5
ภาพ 3
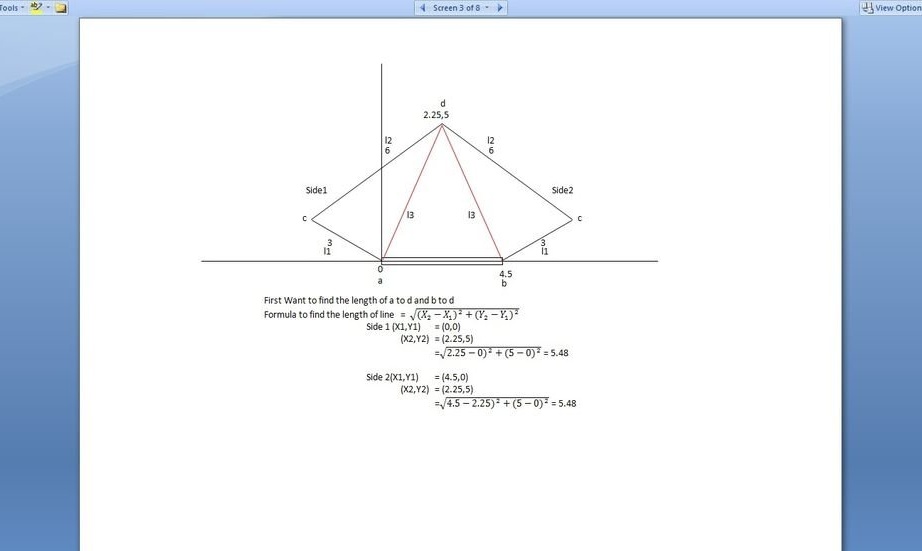
ตอนนี้คุณต้องค้นหาความยาวของสองบรรทัด (0,0) - (2,25,5) และ (4,5,0) - (2,25,5) ใช้สูตรระยะทางและทฤษฎีบทพีทาโกรัส จากสูตร Length = sqrt ((X2-X1) square + (Y2-Y1) square) (ดูรูปเพื่อดูสูตรในรูปแบบที่ถูกต้อง) จุดตั้งอยู่ในใจกลางของแกน Y ด้วยไดรฟ์เซอร์โวดังนั้นทั้งสองด้านจึงมีขนาดสามเหลี่ยมเหมือนกัน ดังนั้นผลลัพธ์คือ 5.48 ทั้งสองทิศทาง
รูปภาพ 4
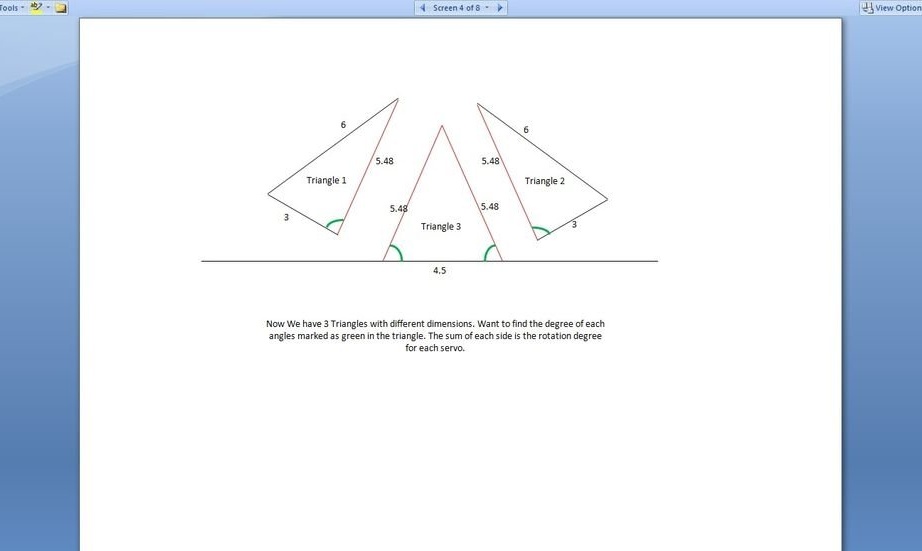
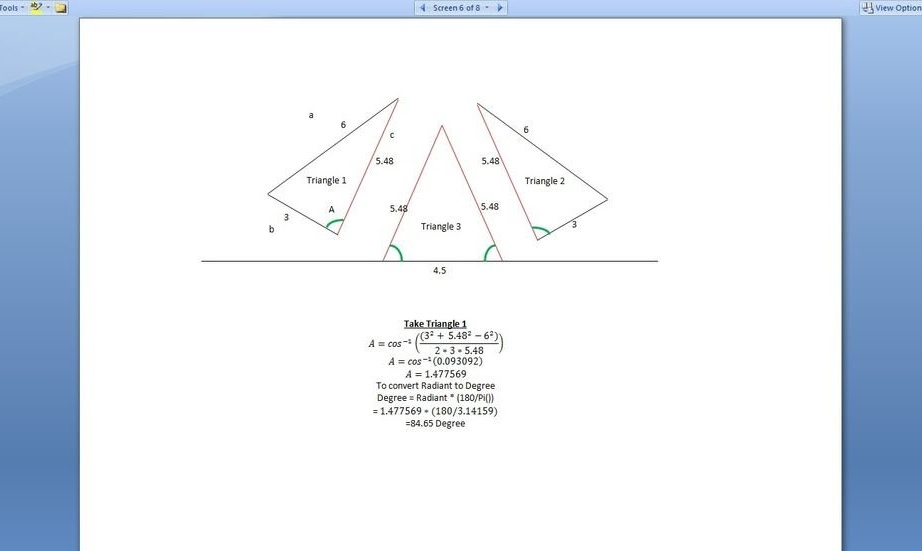
ตอนนี้คุณต้องแยกสามเหลี่ยมออก เราได้สามเหลี่ยมสามอันที่มีทั้งหมด 3 ด้านที่รู้จักกัน
ภาพ 5
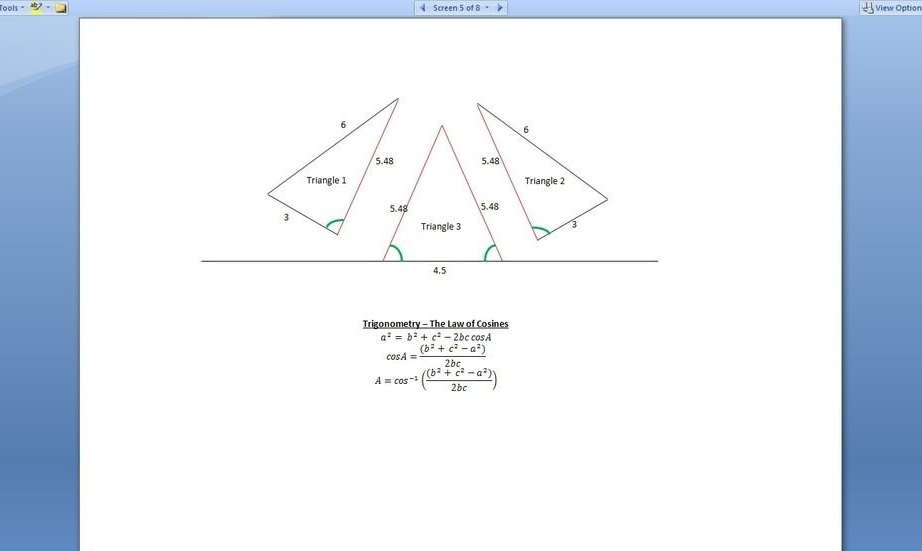
ใช้ตรีโกณมิติ - กฎของโคไซน์เพื่อคำนวณมุมที่เราต้องการ
ภาพที่ 6
ผลลัพธ์ของตรีโกณมิติแสดงเป็นเรเดียนดังนั้นให้ใช้สูตร Degree = Radiant * (180 / pi
()) เพื่อแปลงความกระจ่างเป็นองศา
ภาพที่ 7
รวมองศาในแต่ละด้านกับระดับการเคลื่อนที่ของคันโยก


ใน Excel ตัวช่วยสร้างจะตรวจสอบความถูกต้องของการคำนวณ
การคำนวณ hands.xlsx
ขั้นตอนที่สอง: โครงการ
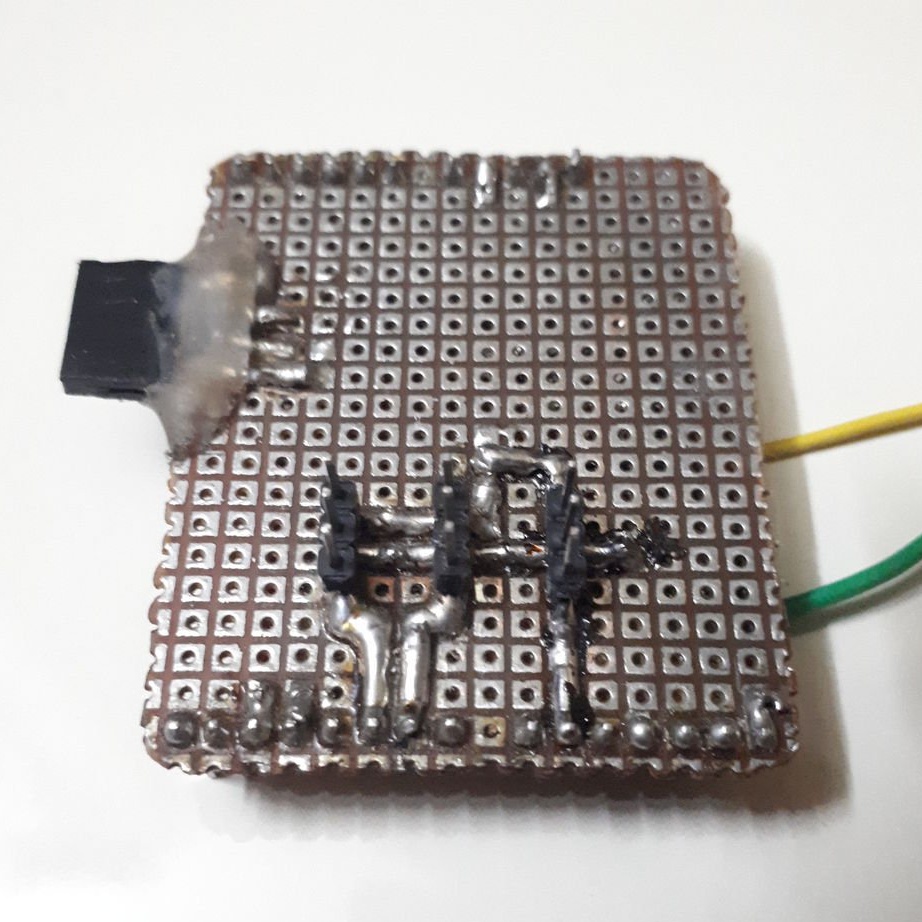
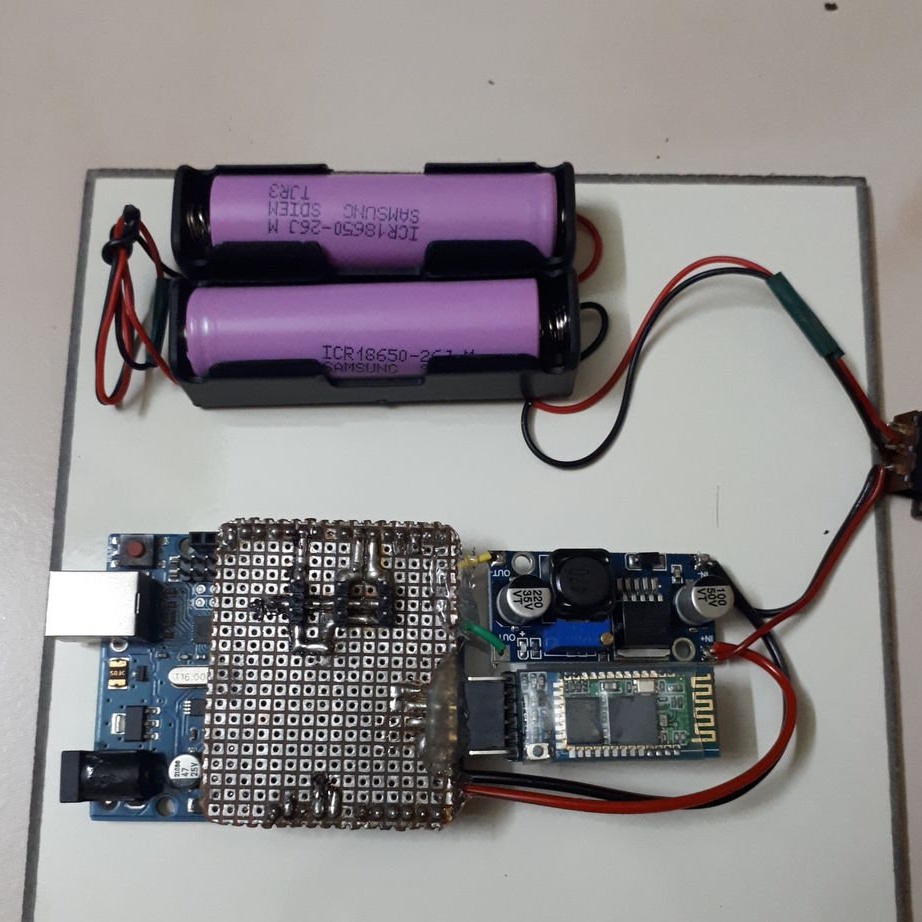
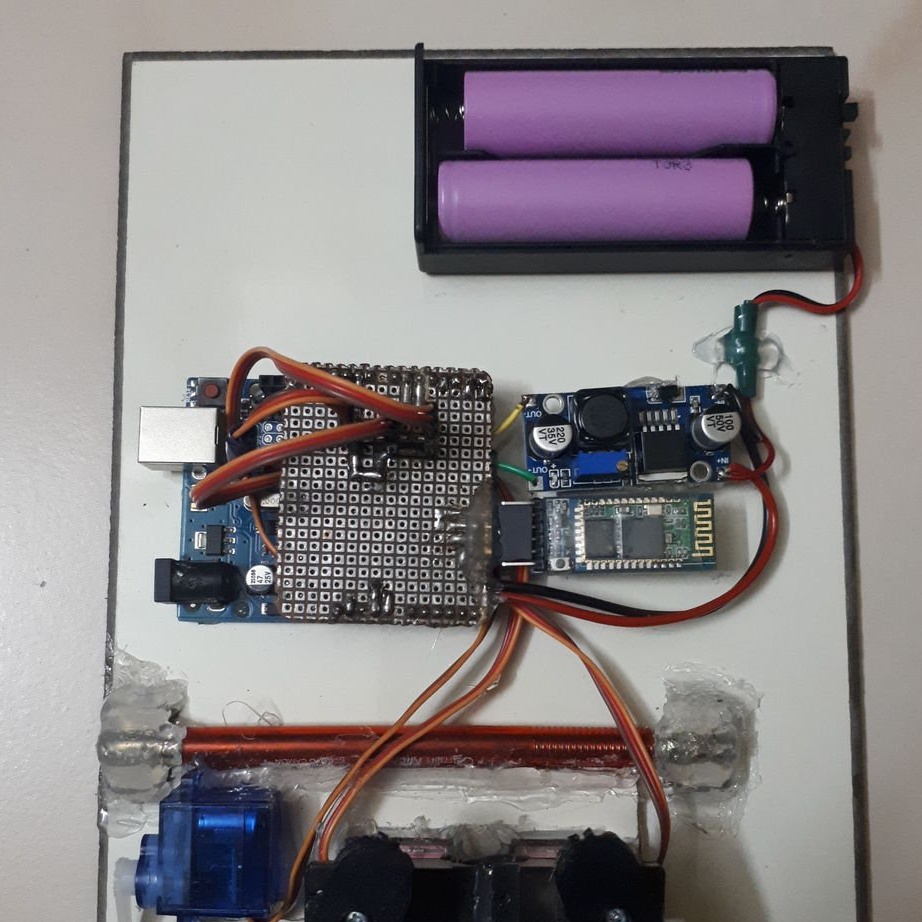
นี่เป็นวงจรที่ง่ายมากที่มีสามเซอร์โว การเชื่อมต่อผ่านเอาต์พุตดิจิตอล 5.6 และ 9 โดยใช้ 5 และ 6 เพื่อควบคุมคันโยกและ 6 สำหรับยก โมดูลบลูทู ธ HC05 เชื่อมต่อผ่าน Tx ไปยังขา Arduino 0 (RX) และ RX เชื่อมต่อกับขา Arduino 1 (TX) แหล่งจ่ายไฟ 7.4 V จากแบตเตอรี่ 2 x 18650 ถูกจ่ายให้กับ Vin-contact ของ Arduino และผ่านตัวควบคุมแรงดันไฟฟ้า LM2596 DC ไปยังเซอร์โว


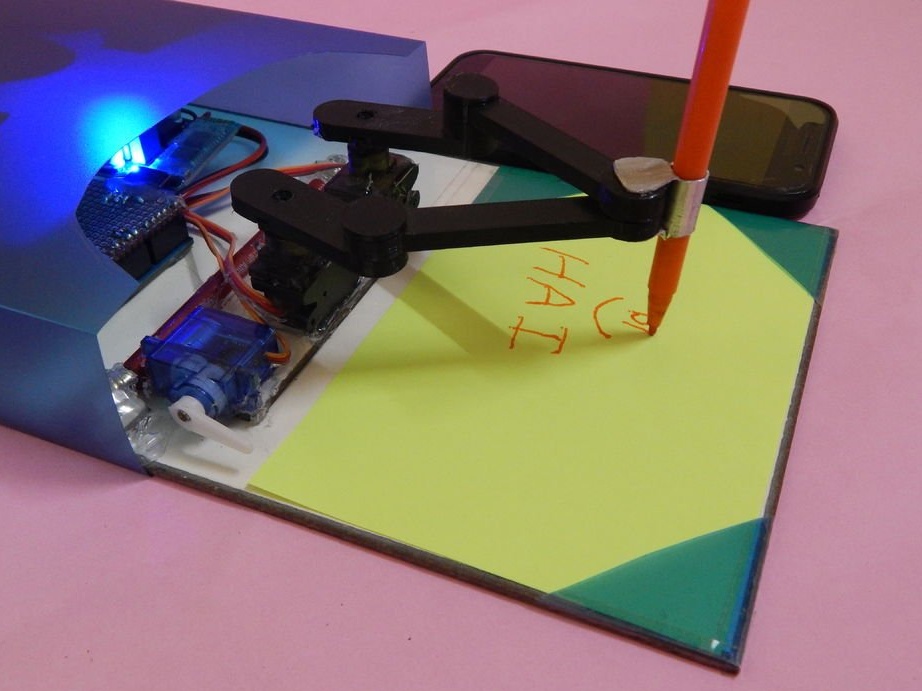
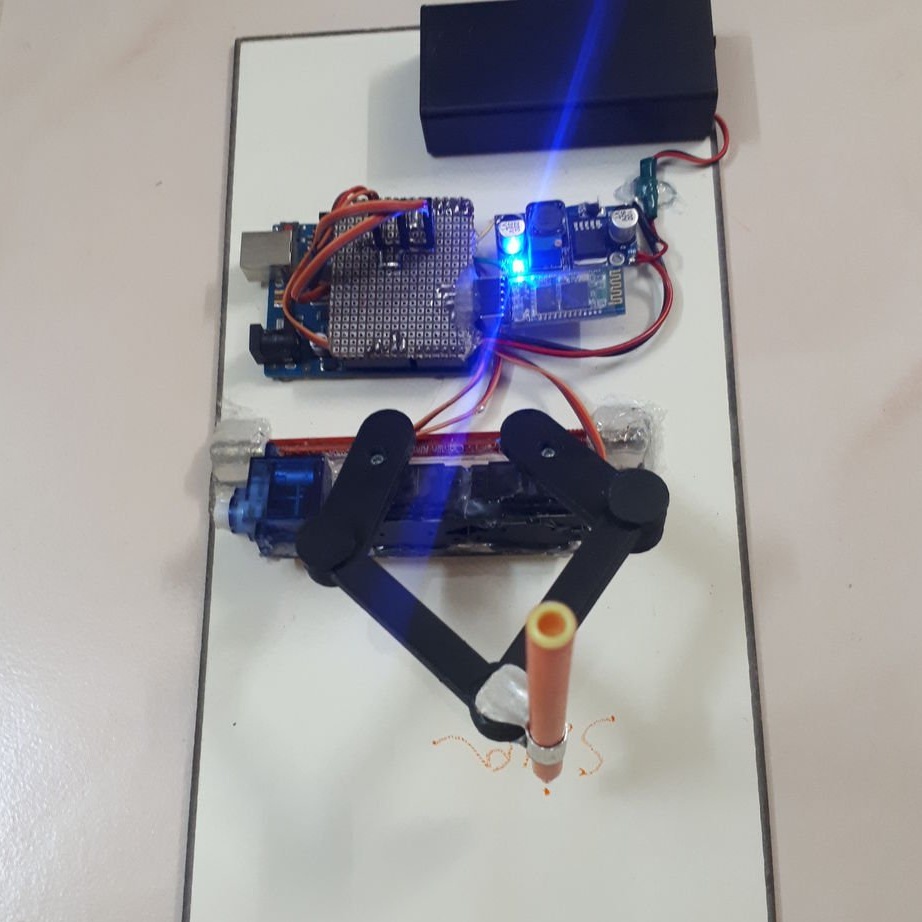
ขั้นตอนที่สาม: เซอร์โว
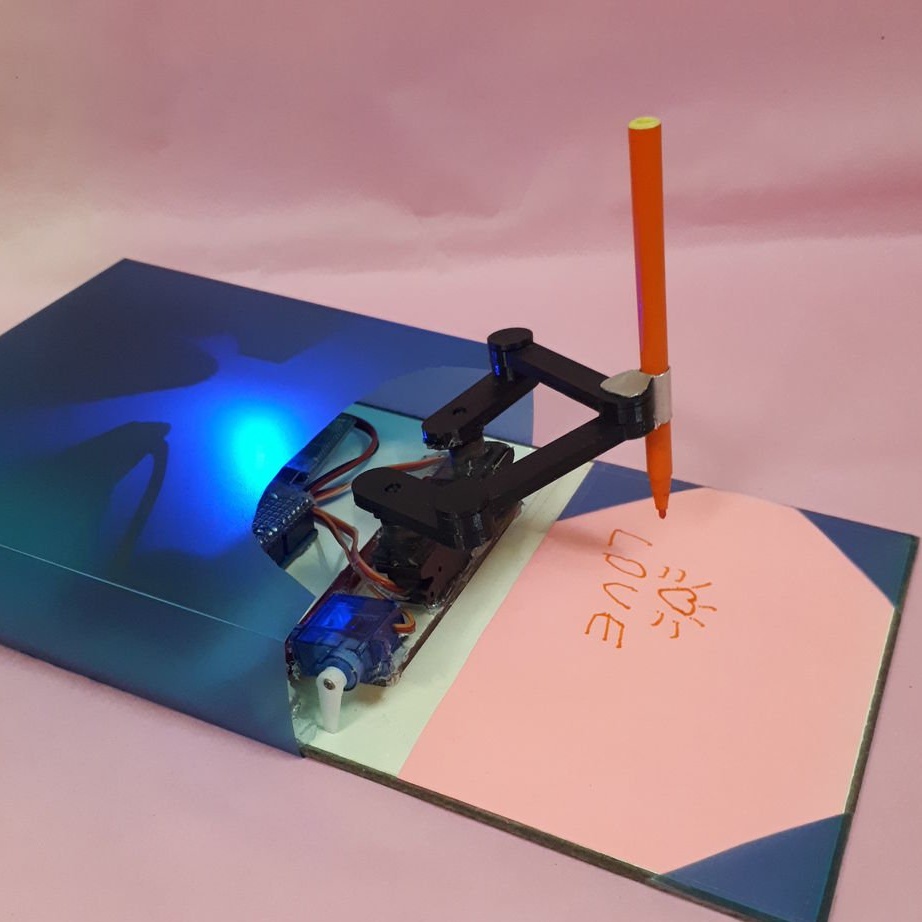
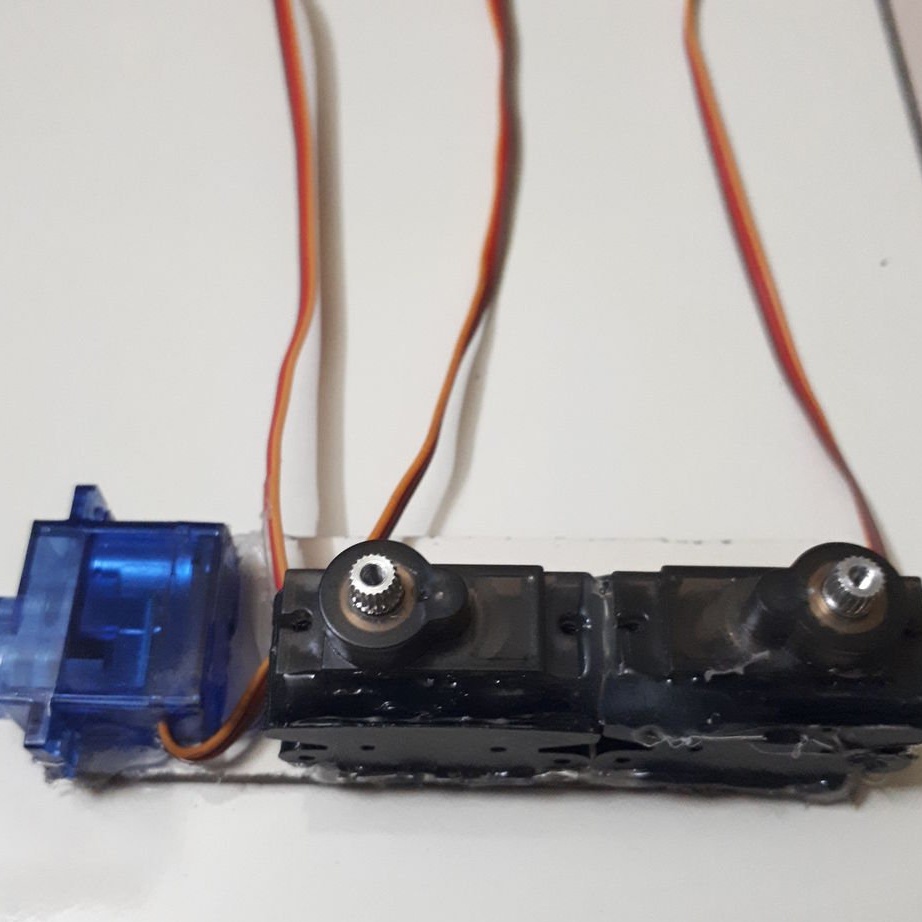
ต้นแบบใช้ MG90S สองตัวสำหรับแขนแนวนอนและ SG90 สำหรับแนวตั้งไดรฟ์เซอร์โวติดอยู่กับแผ่นอะคริลิคตามที่แสดงในภาพ




ขั้นตอนที่สี่: การพิมพ์ 3 มิติ
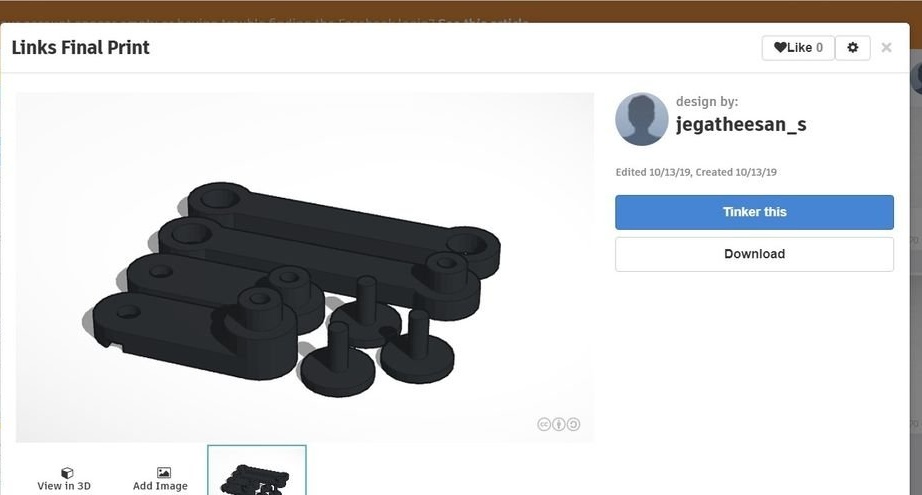
คุณสามารถพิมพ์คันโยกโดยการดาวน์โหลดไฟล์ด้านล่าง
Leglinks.obj
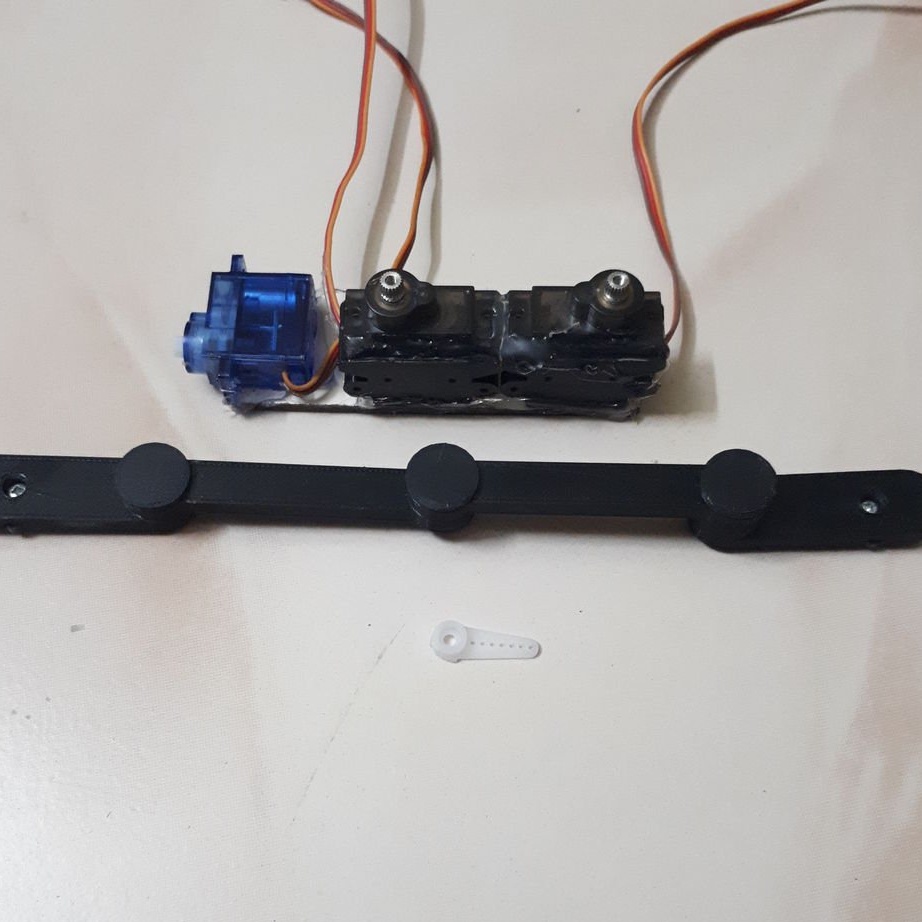
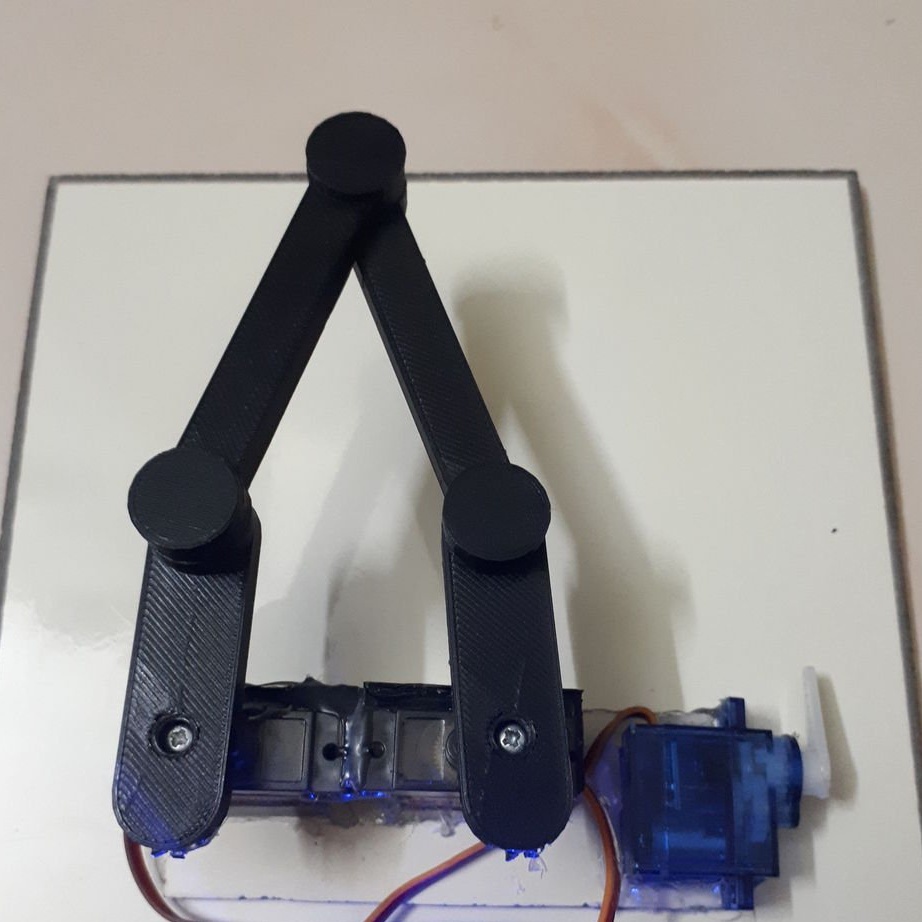
ขั้นตอนที่ห้า: การติดตั้งแขนแนวนอน
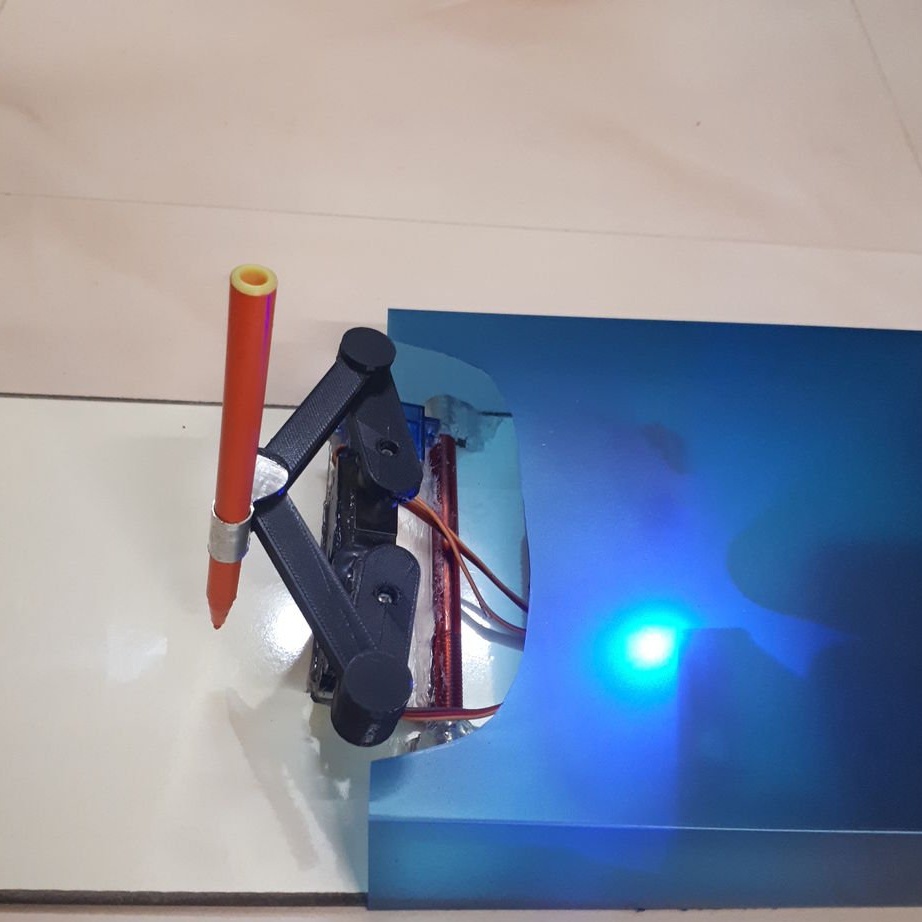
ถัดไปต้นแบบติดคานแบบแนวนอนบนเซอร์โว





ขั้นตอนที่หก: วนรอบ
ห่วงทำจากที่อยู่อาศัยปากกาลูกลื่นและท่อโลหะ ตัวเรือนถูกยึดติดกับฐานของเซอร์โว (อะคริลิกกับเซอร์โวแบบตายตัว) ติดตั้งหลอดในตัวเรือน ปลายของหลอดยึดกับแผ่นอะคริลิก (ฐานของอุปกรณ์ทั้งหมด) เมื่อสัญญาณถูกนำไปใช้กับไดรฟ์เซอร์โวคันโยกนั้นจะติดกับฐานและแท่นที่มีไดรฟ์เพิ่มขึ้น




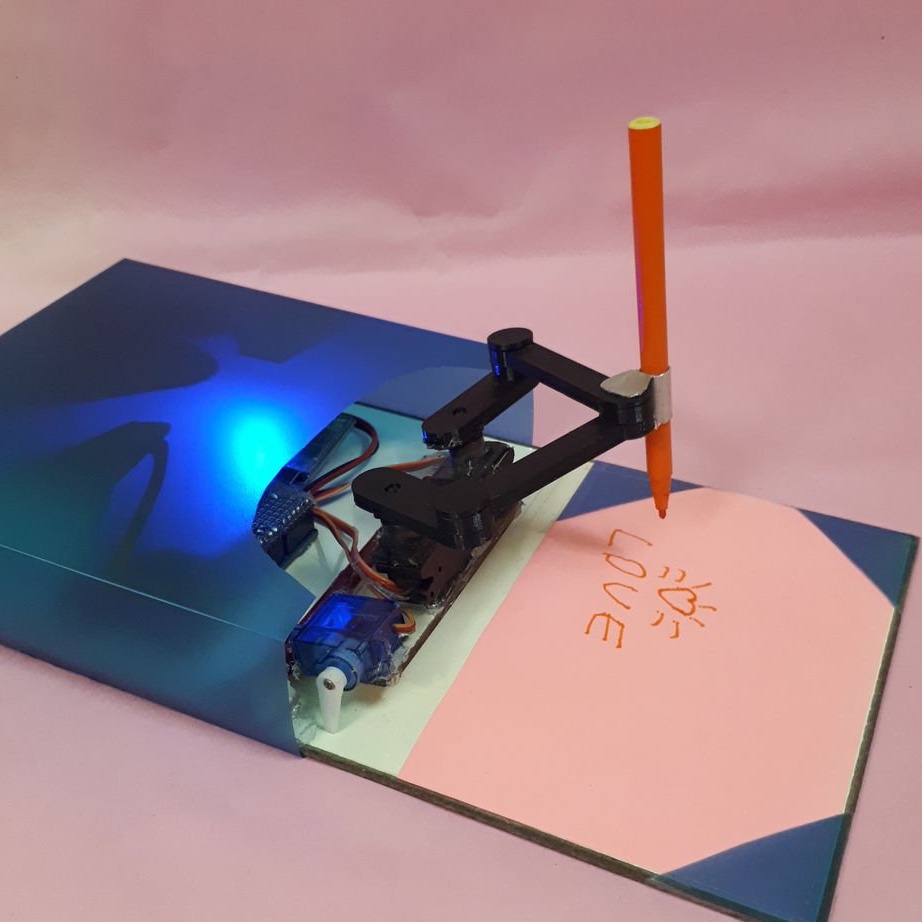
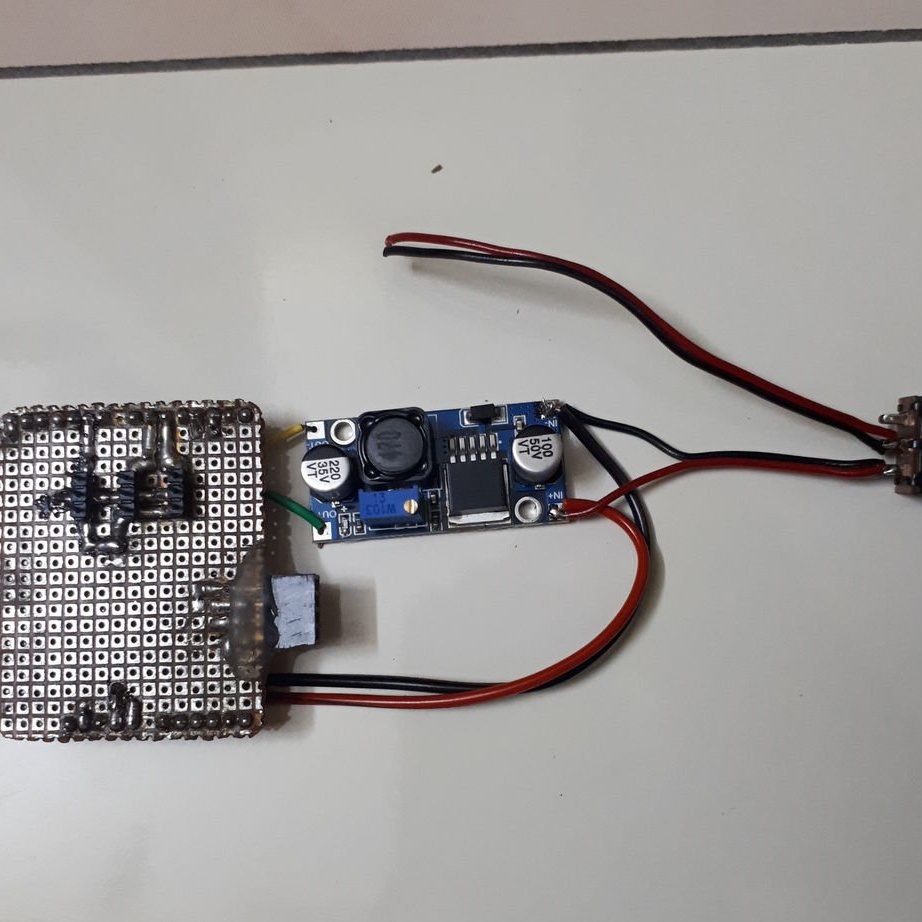
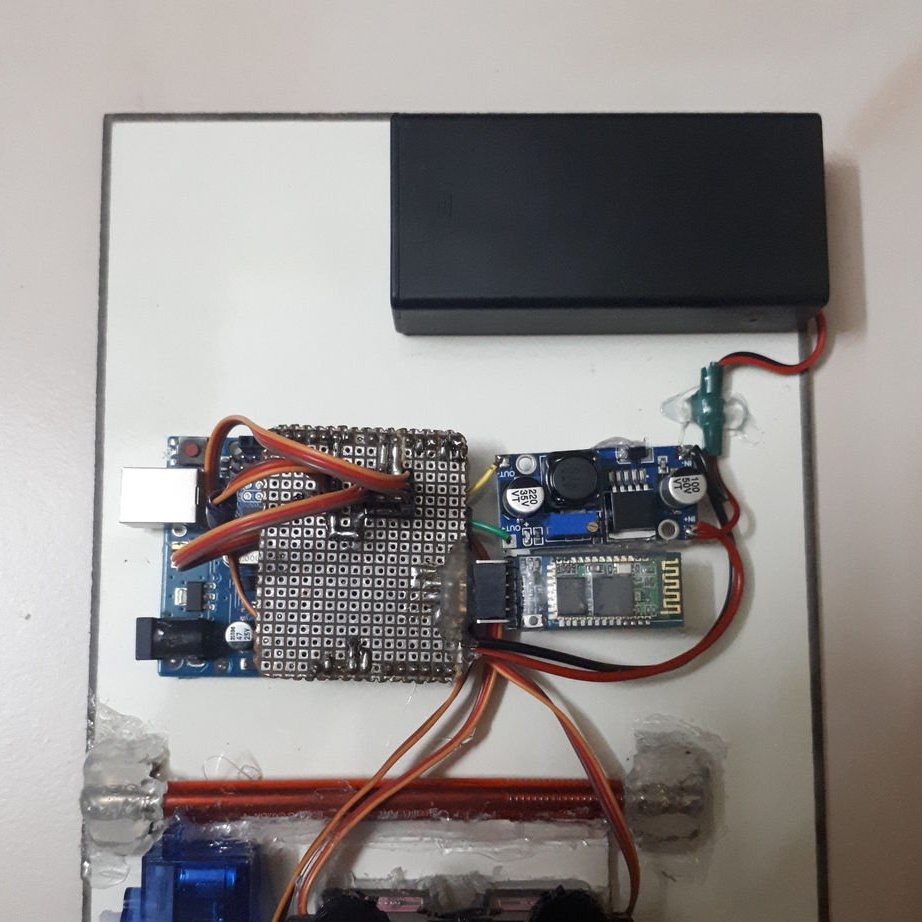
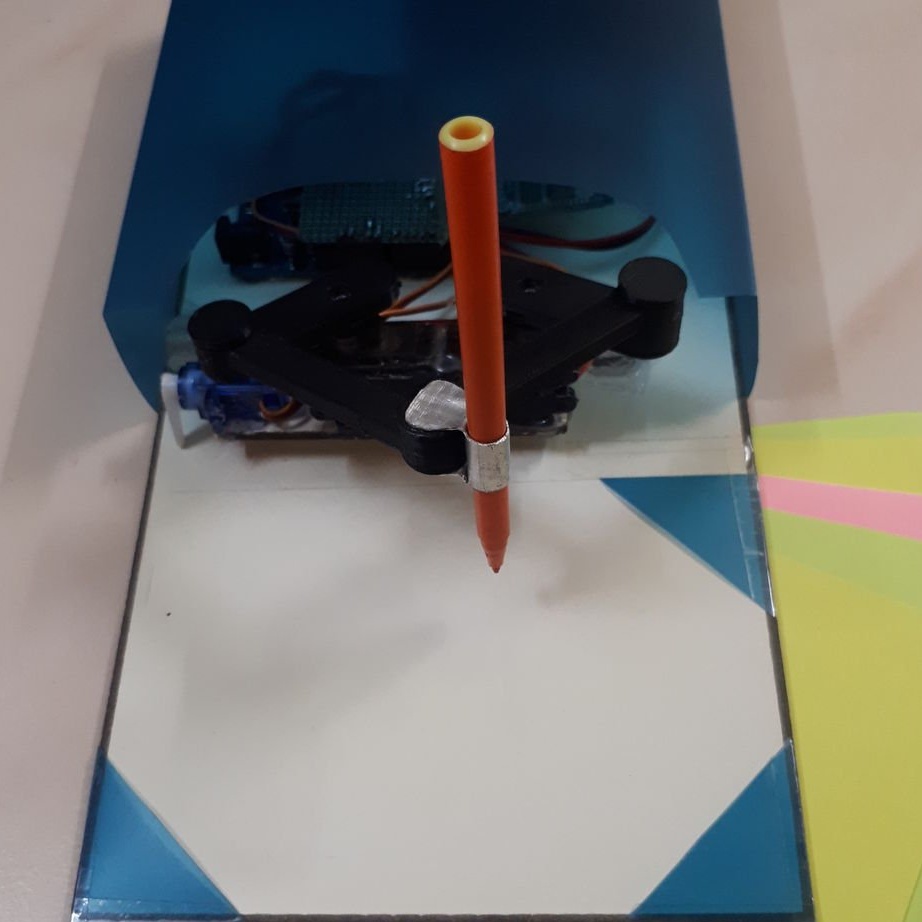
ขั้นตอนที่เจ็ด: การชุมนุม
ที่ฐานกาวร้อนละลายยึดโมดูลทั้งหมดและช่องใส่แบตเตอรี่




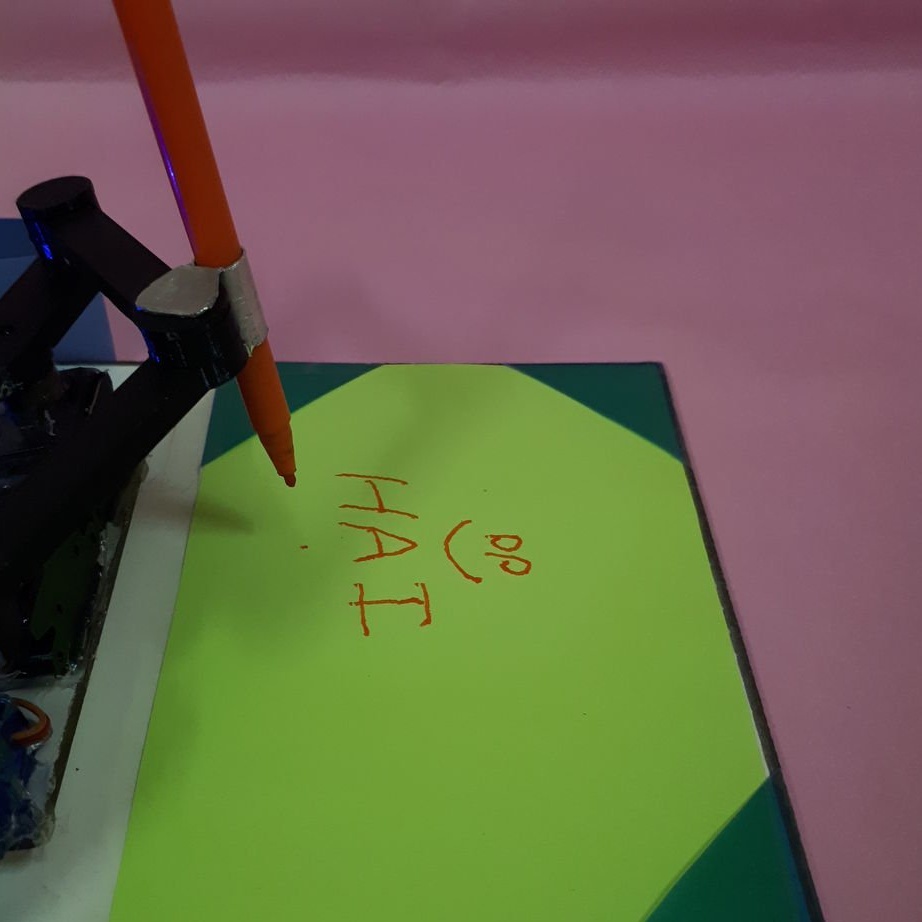
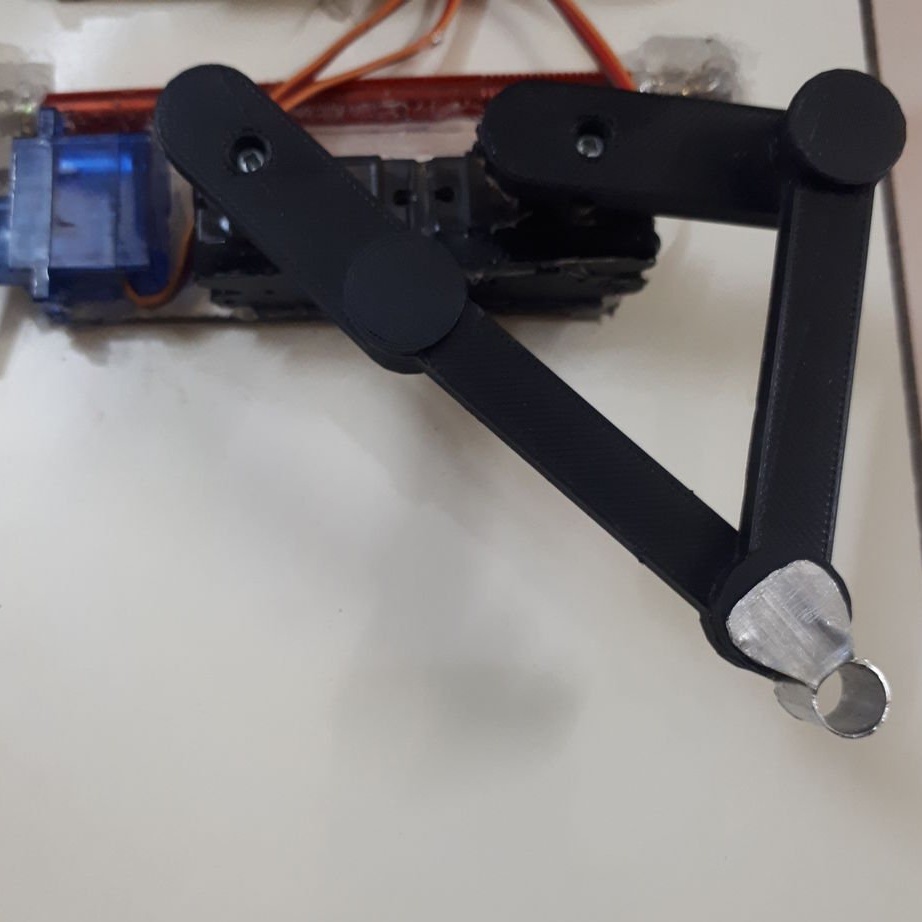
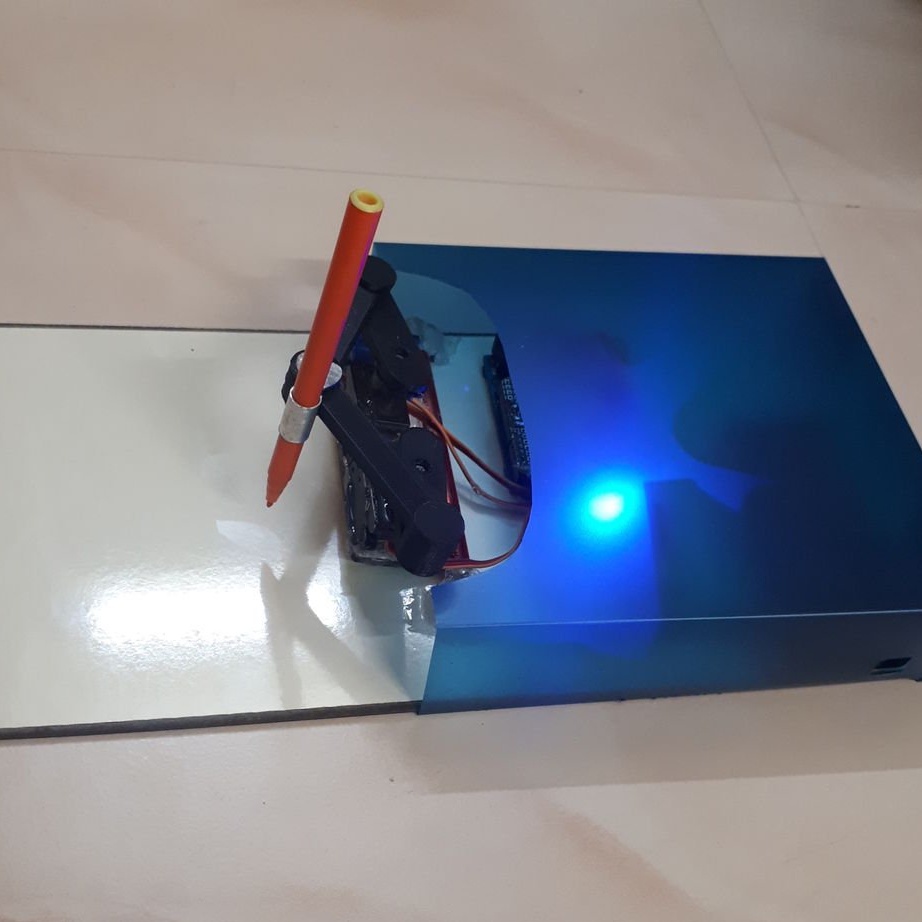
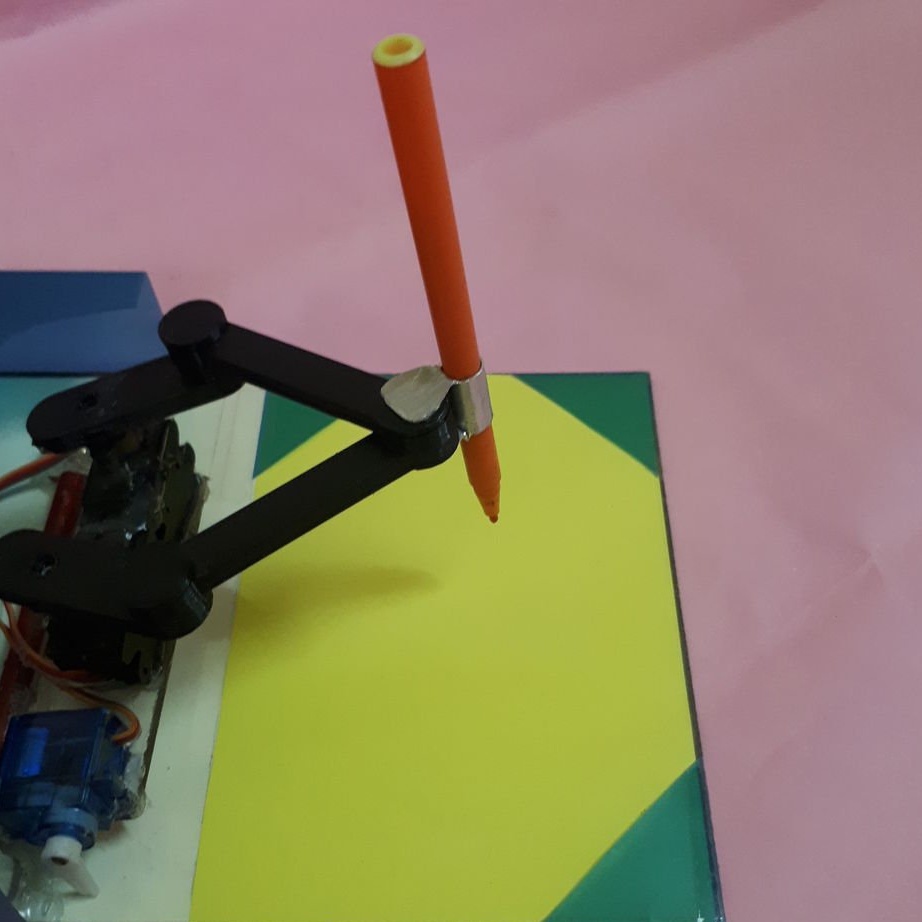
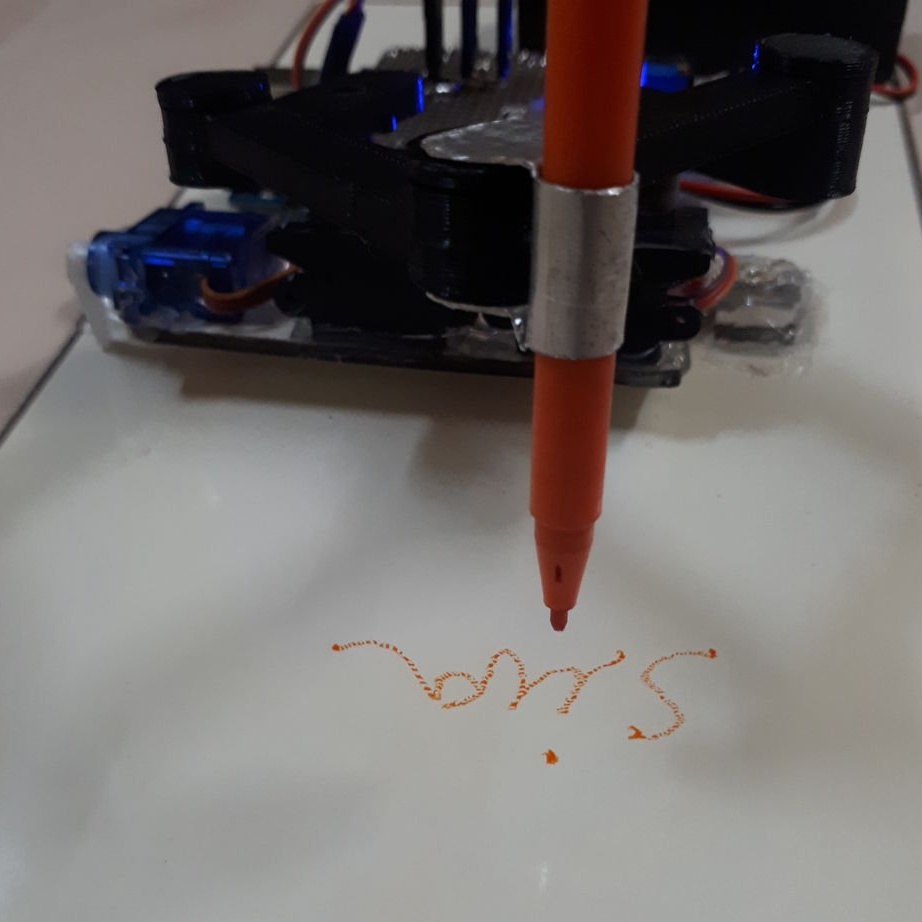
ขั้นตอนที่แปด: ผู้ถือปากกา
ตอนนี้คุณต้องทำให้ผู้ถือปากกา ต้นแบบตัดท่ออลูมิเนียมออก 43 ซม. 15 เซนติเมตรลดลงจากปลายทั้งสองของหลอดและตัดเป็นรัศมีของหลอด จากนั้นตัดส่วนเหล่านี้ตามและเปลี่ยนปลายของหลอด




ตัดขอบและบดขอบ


ยึดที่ยึดกับก้านติดตั้งที่จับในที่ยึด


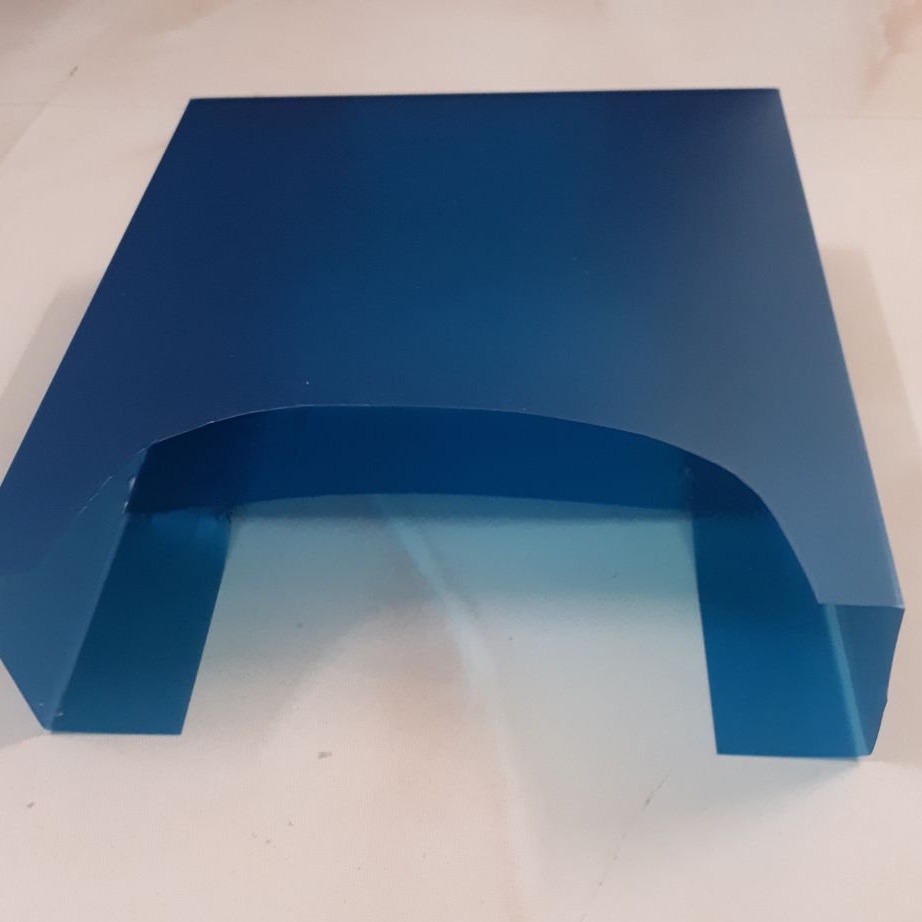
ขั้นตอนที่เก้า: กรณี
คริลิคทำให้กรณีของอุปกรณ์
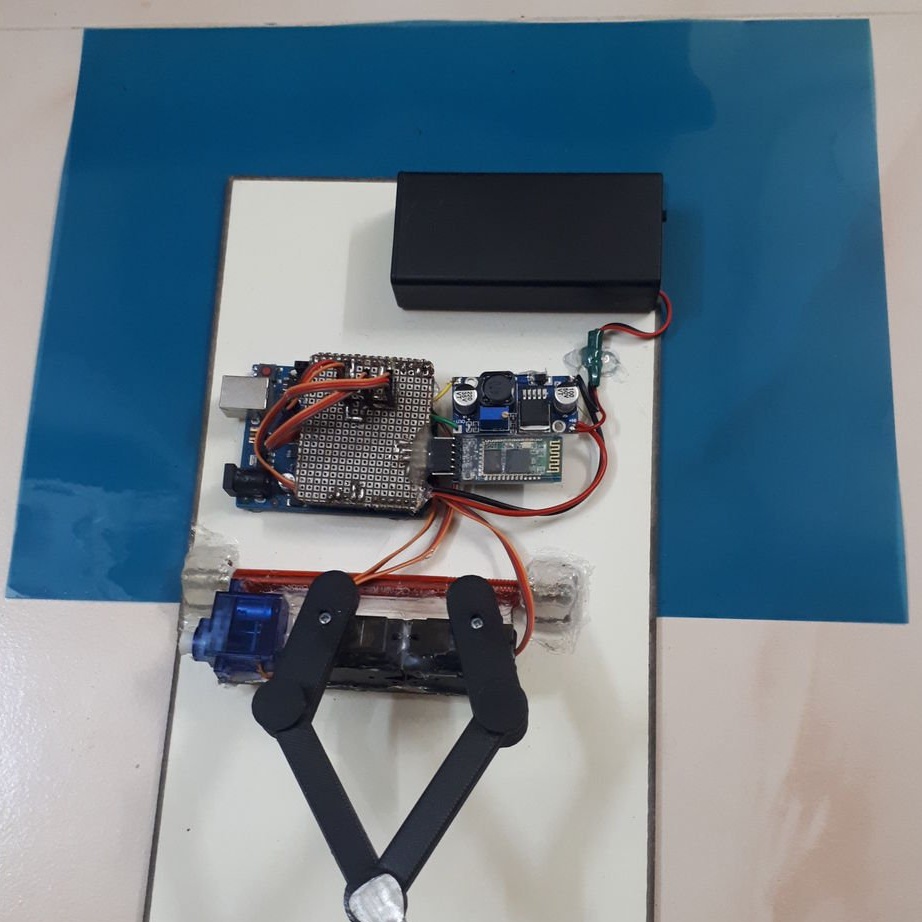



ขั้นตอนที่สิบ: ที่ใส่กระดาษ
ตัดสามเหลี่ยมสามรูปจากอะคริลิก ยึดไว้ที่มุมฐานด้านหน้าคันโยก



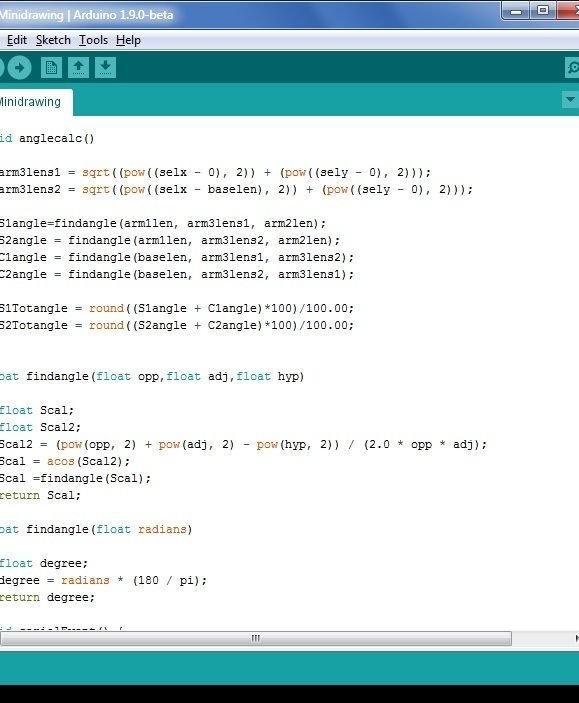
ขั้นตอนที่สิบเอ็ด: รหัส
Android ส่งคำสั่งไปยัง Arduino ผ่านโมดูลบลูทู ธ เซอร์โวหมุน 180 องศาในแนวนอนและแนวตั้ง 60 องศา หากมุมมีขนาดใหญ่กว่าคันโยกจะสูงขึ้นและค้างที่จุดสูงสุด
รหัสสามารถดาวน์โหลดได้ด้านล่าง
Arduino.rar การวาดมินิ
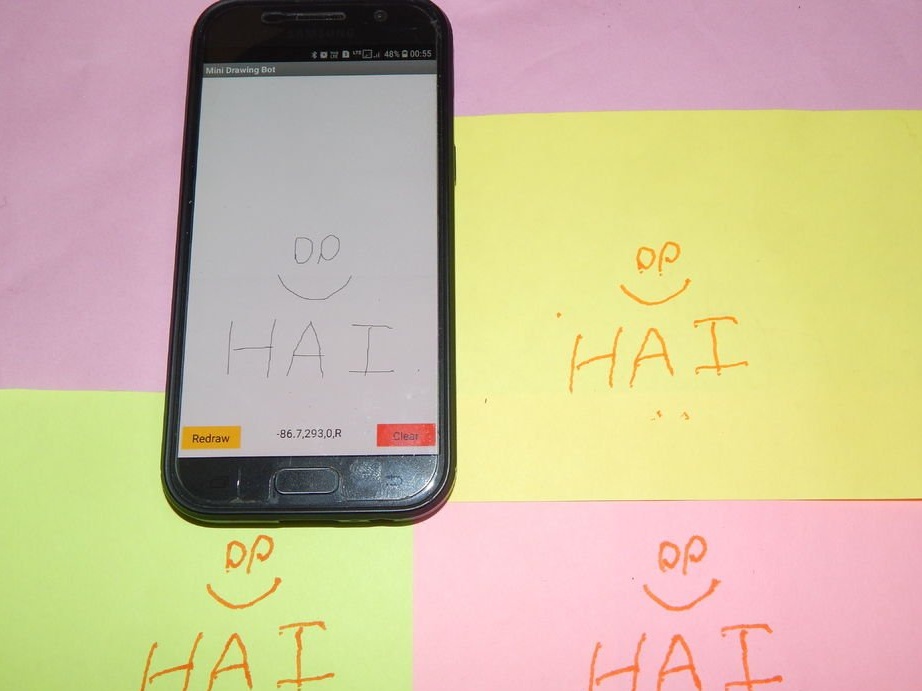
ขั้นตอนที่สิบสอง: แอปพลิเคชัน Android
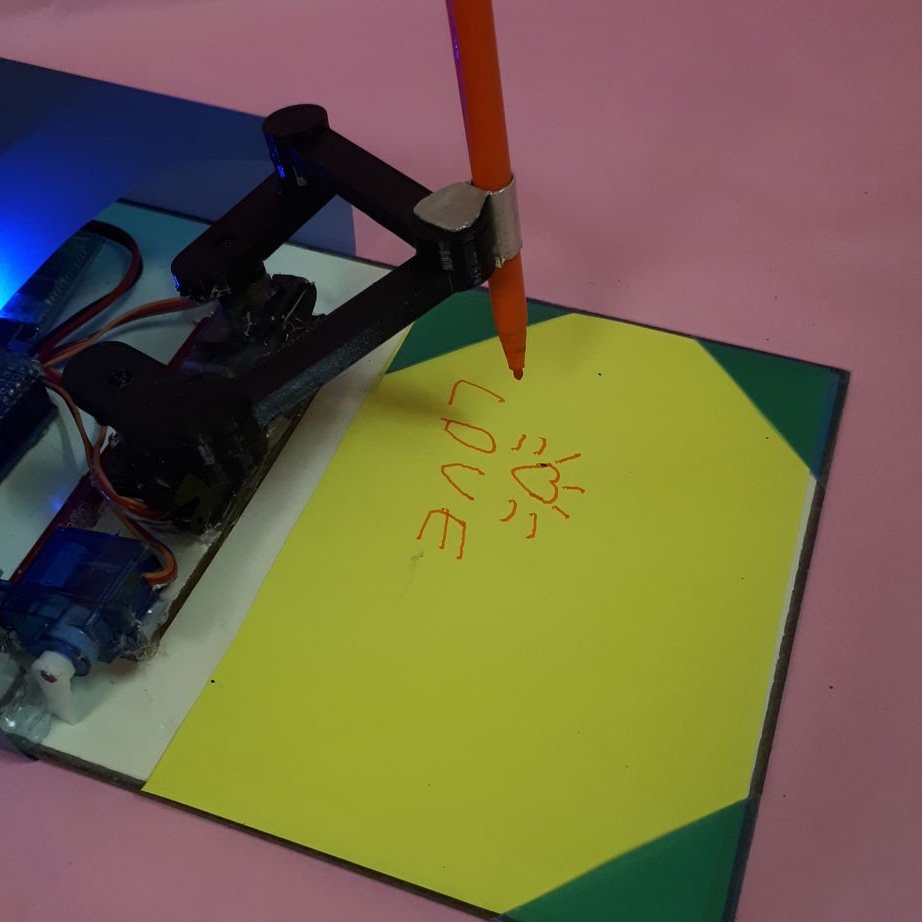
ในการควบคุมอุปกรณ์ด้วย Gadget ของ Android ต้นแบบจะพัฒนาแอปพลิเคชันพิเศษ จับคู่สมาร์ทโฟนกับ Arduino แล้วเปิดโปรแกรม โปรแกรมมีหน้าต่างสำหรับวาดภาพ อักขระทั้งหมดที่เขียนบนหน้าจอจะถูกทำซ้ำโดยอุปกรณ์ ที่ด้านล่างของหน้าจอมีปุ่มควบคุมสองปุ่มและทางลัดแสดงคำสั่ง เนื่องจากความยาวของคันโยกคุณต้องเขียนที่ด้านล่างของหน้าจอ


โปรแกรมสำหรับผู้ใช้และนักพัฒนาสามารถดาวน์โหลดได้ที่ด้านล่าง
Mini-drawing aia file.rar
การลากไฟล์ apk ขนาดเล็ก
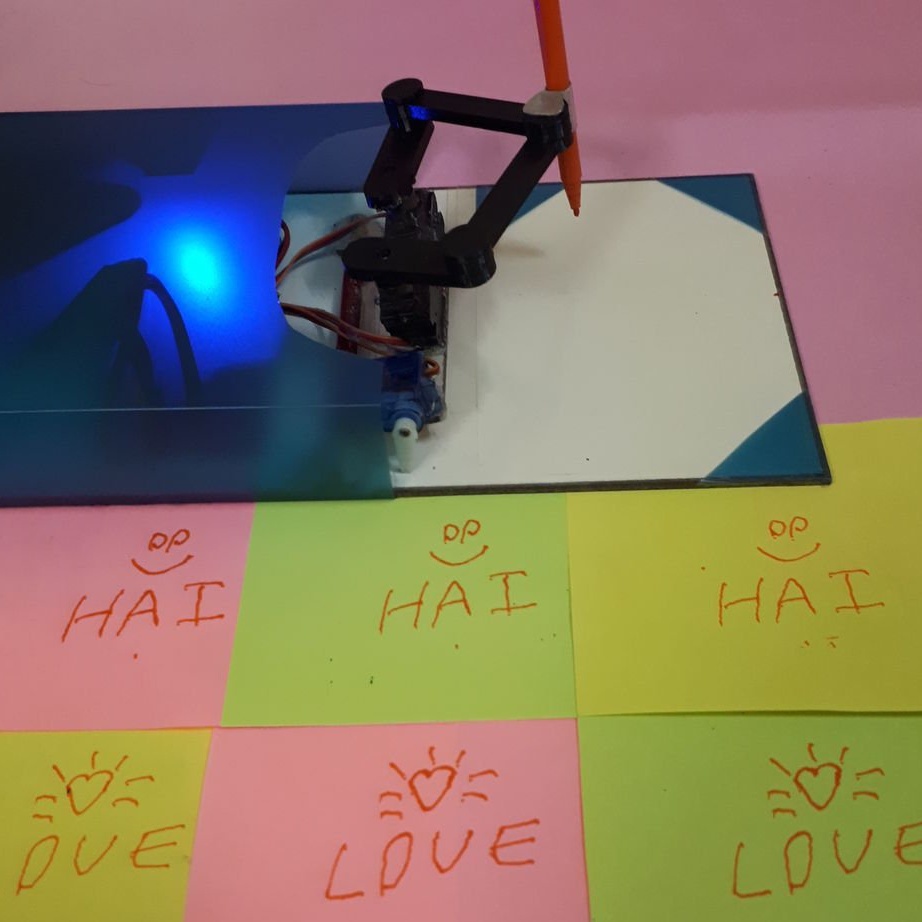
จากนั้นตัวช่วยสร้างจะทำการทดสอบอุปกรณ์
ทุกอย่างพร้อมแล้ว