

อาศิรพจน์ ชาวเว็บไซต์ของเรา!
ในครั้งนี้ AlexGyver ผู้เขียนช่อง YouTube ที่มีชื่อเดียวกันเกี่ยวกับวันหยุดซึ่งเราไม่ชอบเลยตัดสินใจทำซ้ำ โครงการ Adafruit - ดวงตาไบโอนิคที่ใส่เข้าไปในแก้วของช่างเชื่อมก๊าซ

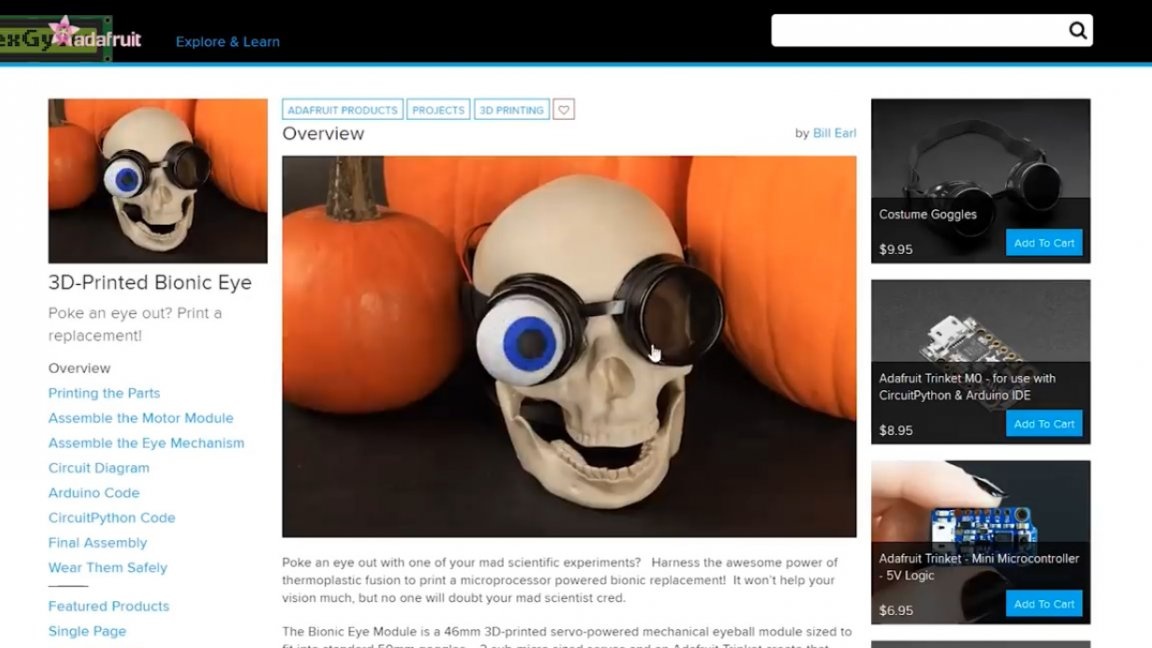
จากมุมมองของรหัสโครงการเสร็จนี้ไม่น่าสนใจอย่างที่ผู้เขียนมีความสนใจในกลไกคือระบบพิกัด
เราจะกลับมาที่นี่อีกไม่นาน แต่ก่อนอื่นมารวบรวมกลไกและเชื่อมต่อทุกอย่างกันก่อน อิเล็กทรอนิกส์ ส่วนประกอบ
หากต้องการทำซ้ำโครงการนี้คุณจะต้อง:
1) แว่นตาช่างเชื่อมก๊าซ คุณสามารถใช้ทั้งโลหะและพลาสติก

พลาสติกพอดีดีกว่าแน่นอน แต่แน่นอนพวกเขาไม่สามารถอวดคุณภาพ โดยเฉพาะอย่างยิ่งในกรณีนี้ทำจากพลาสติกด้านข้างลดลงทันทีและผู้เขียนจะต้องติดกาวพวกเขา

แว่นตาดังกล่าวสามารถหาซื้อได้ที่ร้านขายเครื่องมือหรือวัสดุก่อสร้าง ผู้เขียนซื้อสิ่งเหล่านี้ในร้านเครื่องมือทั้งหมด
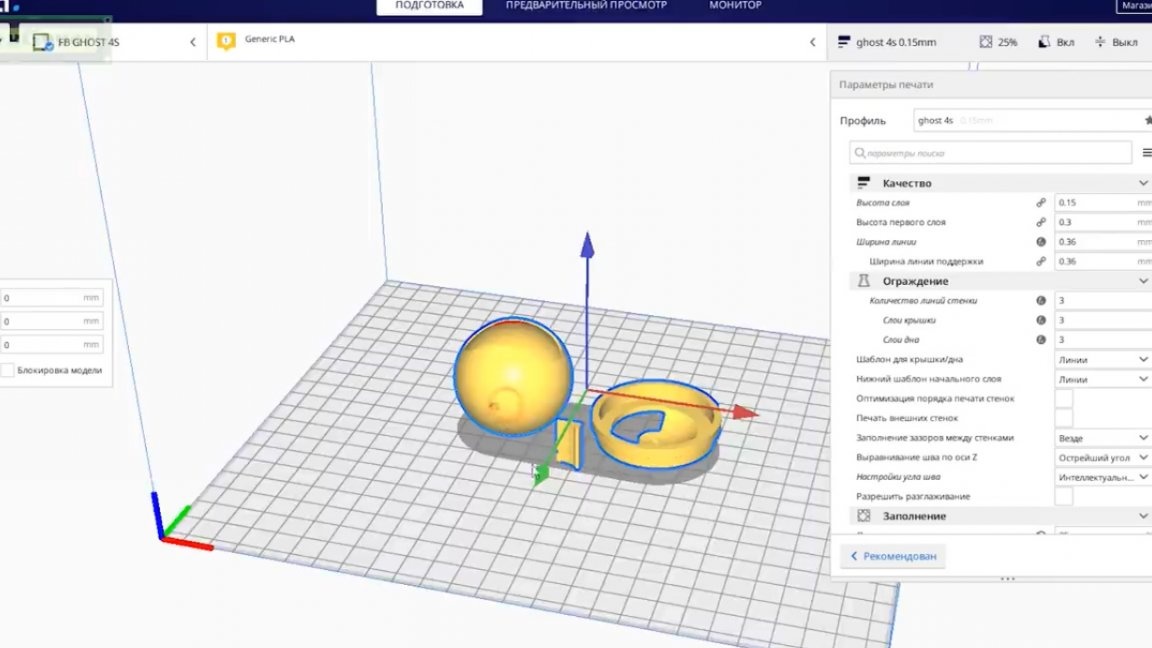
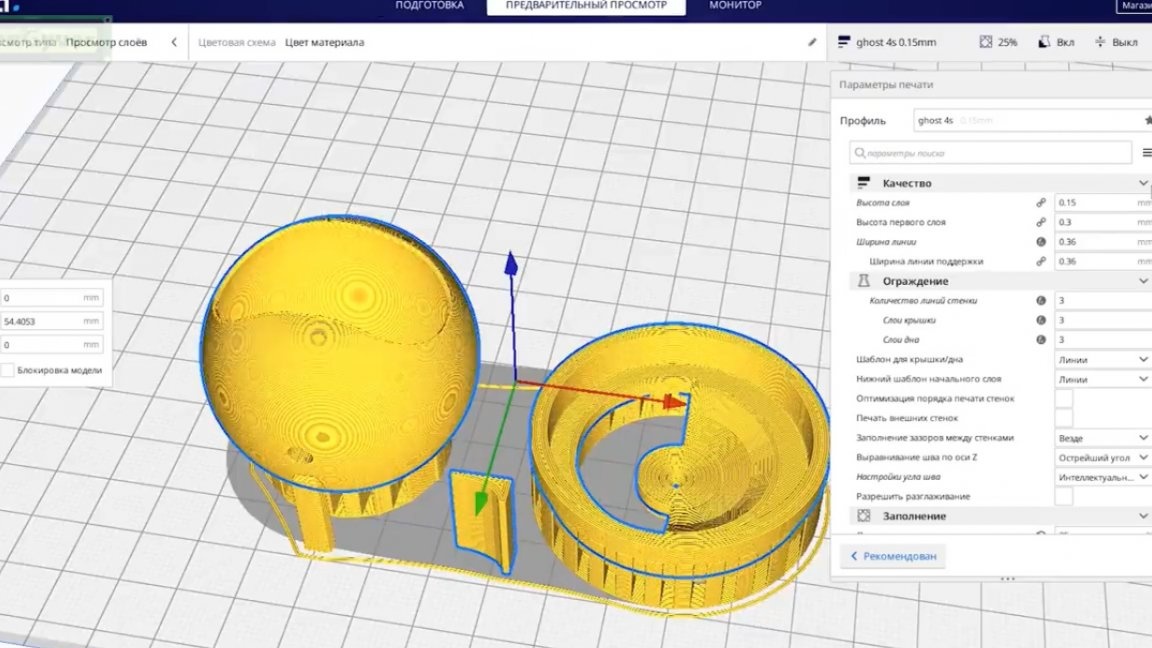
2) ต่อไปเราต้องพิมพ์สิ่งเหล่านี้ เครื่องพิมพ์ 3 มิติ ชิ้นส่วนอะไหล่
ผู้เขียนพิมพ์องค์ประกอบด้วยพลาสติก PLA สีขาวบนเครื่องพิมพ์ 3D flyingbear ghost 4s รุ่นใหม่ 32 บิต ไฟล์ มีทั้งหมด 3 รุ่นพร้อมกัน จำเป็นต้องทำการพิมพ์ด้วยการรองรับ

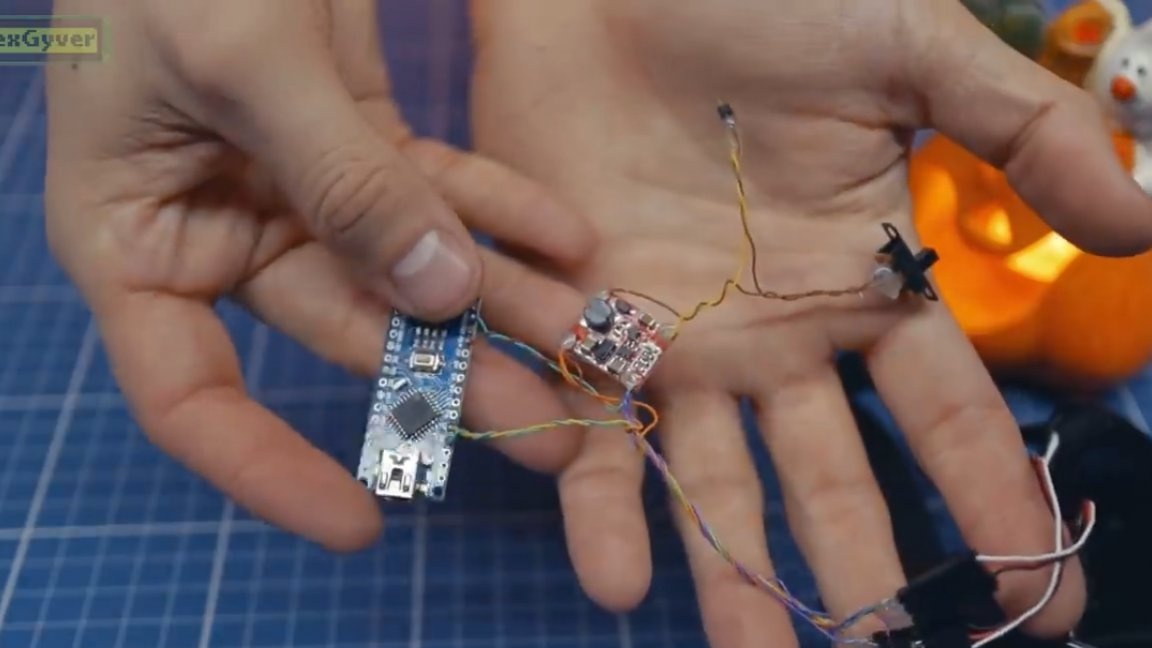
3) องค์ประกอบต่อไปที่จำเป็นสำหรับโครงการพิเศษวันฮาโลวีนของเราคือแพลตฟอร์ม Arduino นาโนโมเดล.

4) ต้องระบุด้วย แบตเตอรี่ลิเธียมไอออน:
5) เพิ่มตัวแปลง dc-dc (สูงสุด 5V);
6) สลับ:

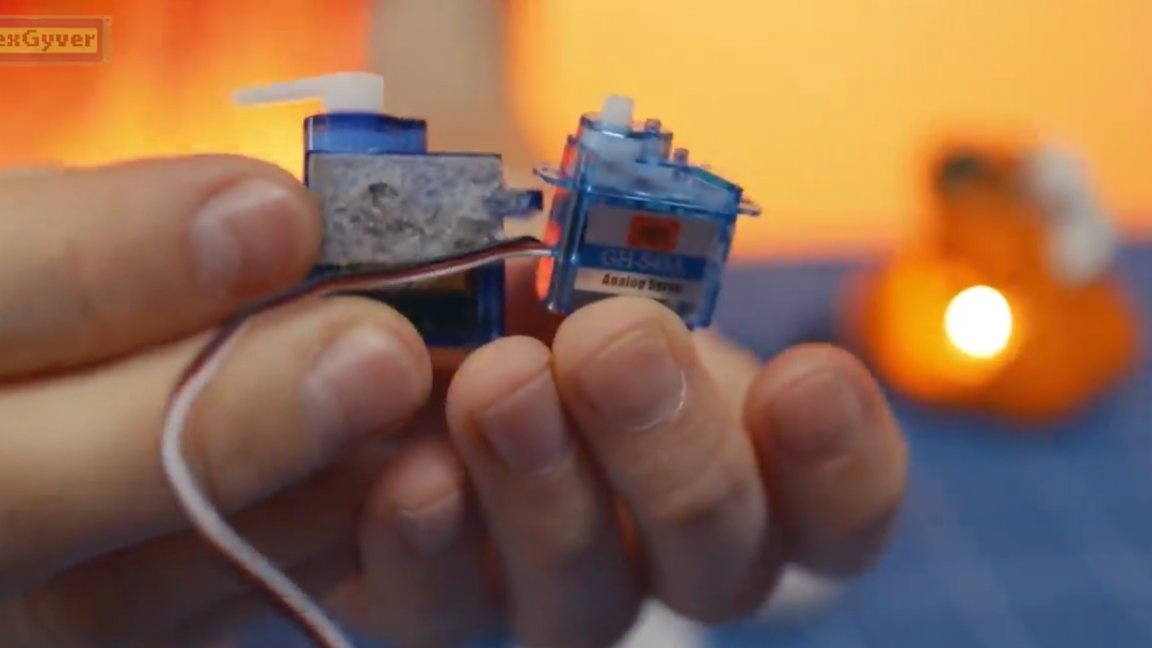
7) เซอร์โวไมโครแต่ไม่ได้มาตรฐาน 9 กรัม แต่น้อยกว่า:
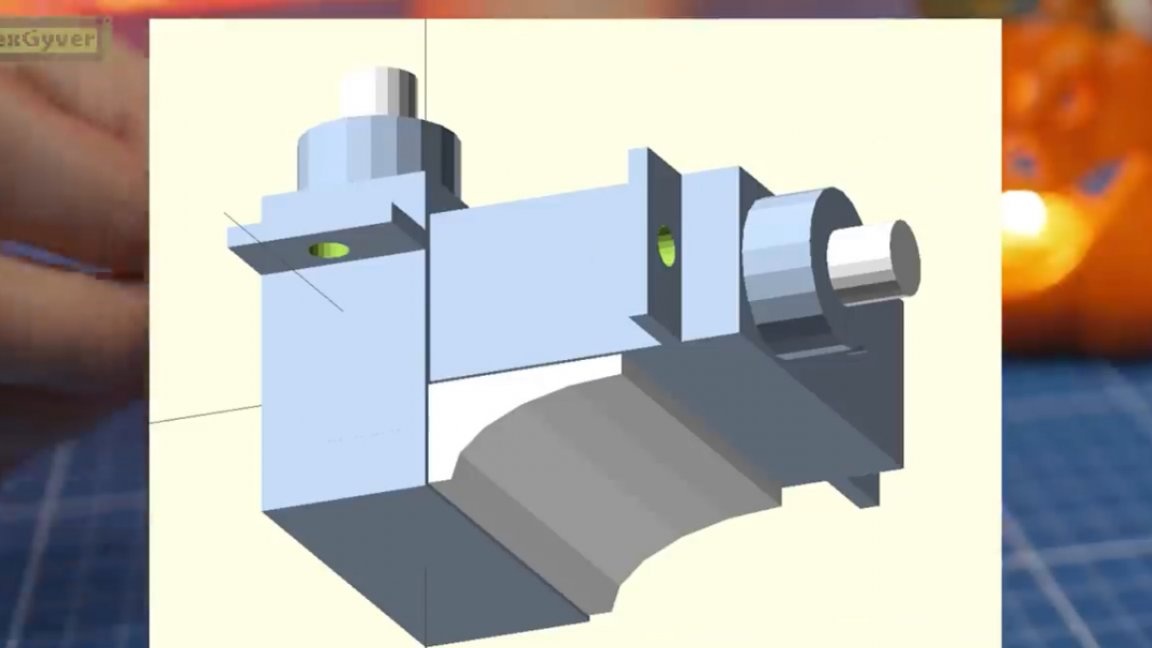
ดังนั้นด้วยองค์ประกอบที่จำเป็นเรียงลำดับออกมาลงไปประกอบอุปกรณ์กัน อันดับแรกเราต้องติดตั้งไดรฟ์ดังนี้:
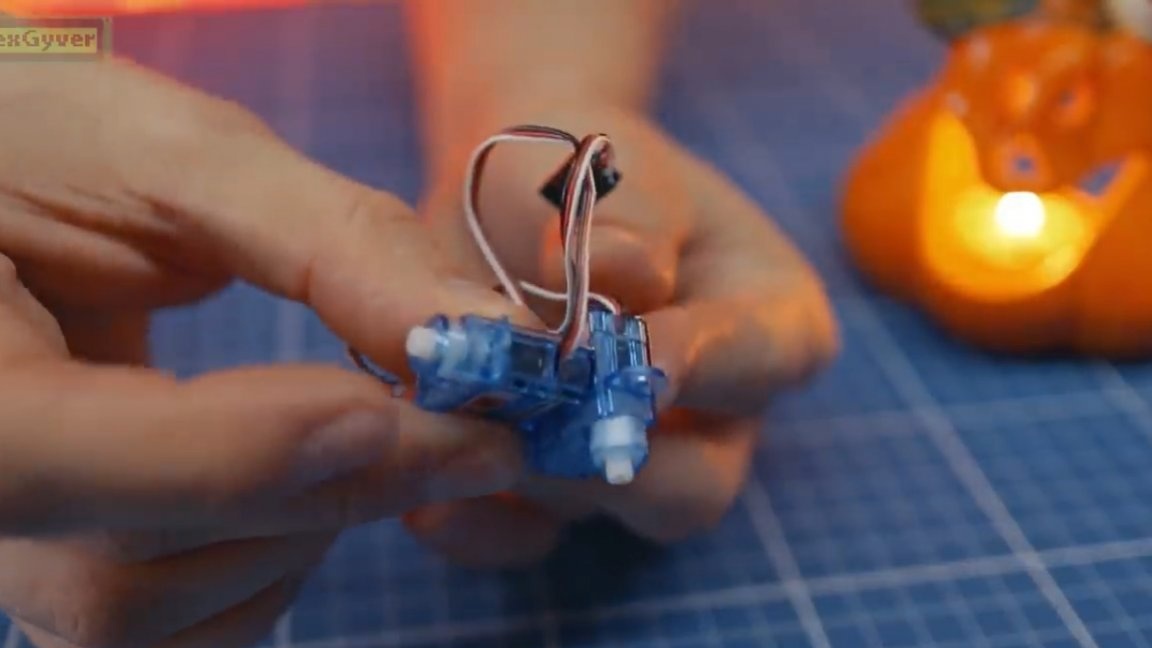
นี่เป็นภาพที่เข้าใจได้มากขึ้น:
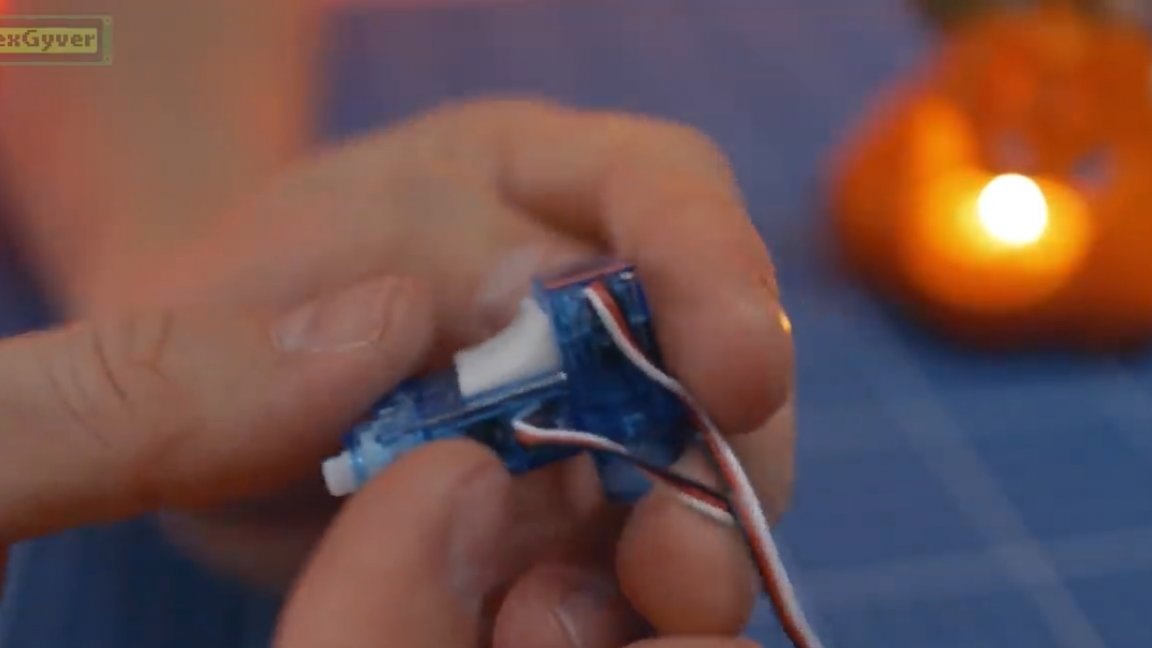
เราลบสติกเกอร์และด้วยความช่วยเหลือของ superglue เราเชื่อมโยงสิ่งนี้ทั้งหมด


อย่างไรก็ตามเซอร์โวจีนดูเหมือนจะแตกต่างจาก Adafruth เล็กน้อยและคุณต้องยึดติดไว้กับสิ่งนี้ด้วยออฟเซ็ตเล็กน้อย:
หูจะต้องถูกลบออกพวกเขาจะเข้าไปยุ่ง
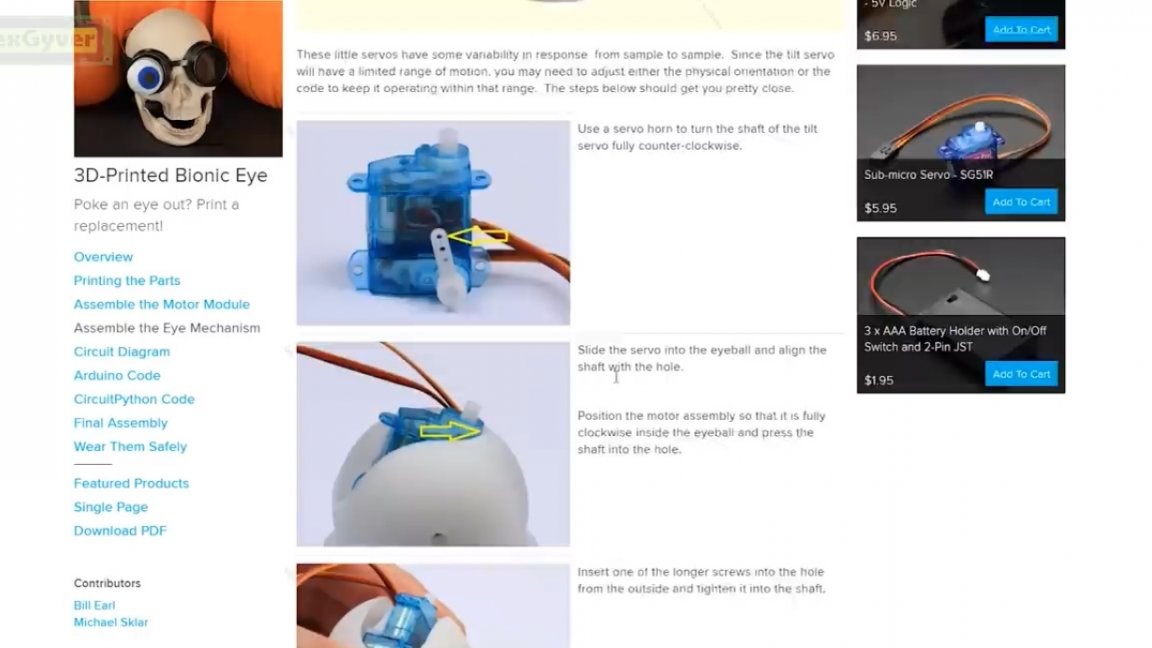
จากนั้นไปที่ไดรฟ์ล่างเราขอโยกและหมุนเพลาทวนเข็มนาฬิกา

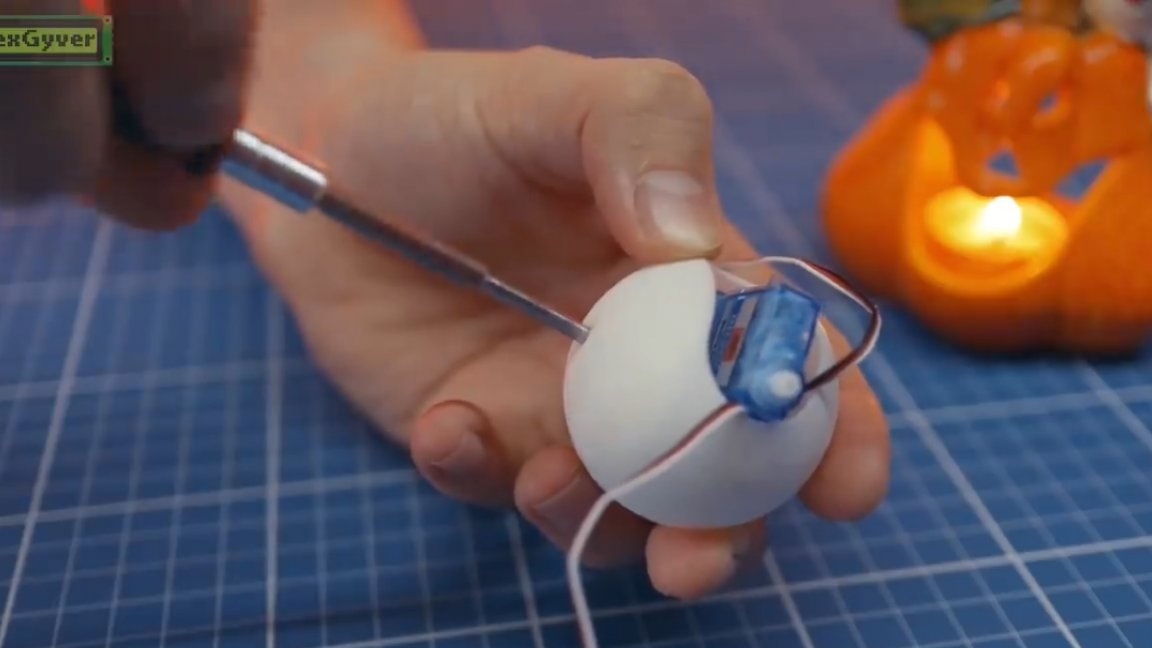
ใส่เซอร์โวลงในที่พิมพ์ไว้ล่วงหน้า เครื่องพิมพ์ 3 มิติ ว่างเปล่า (ตา)
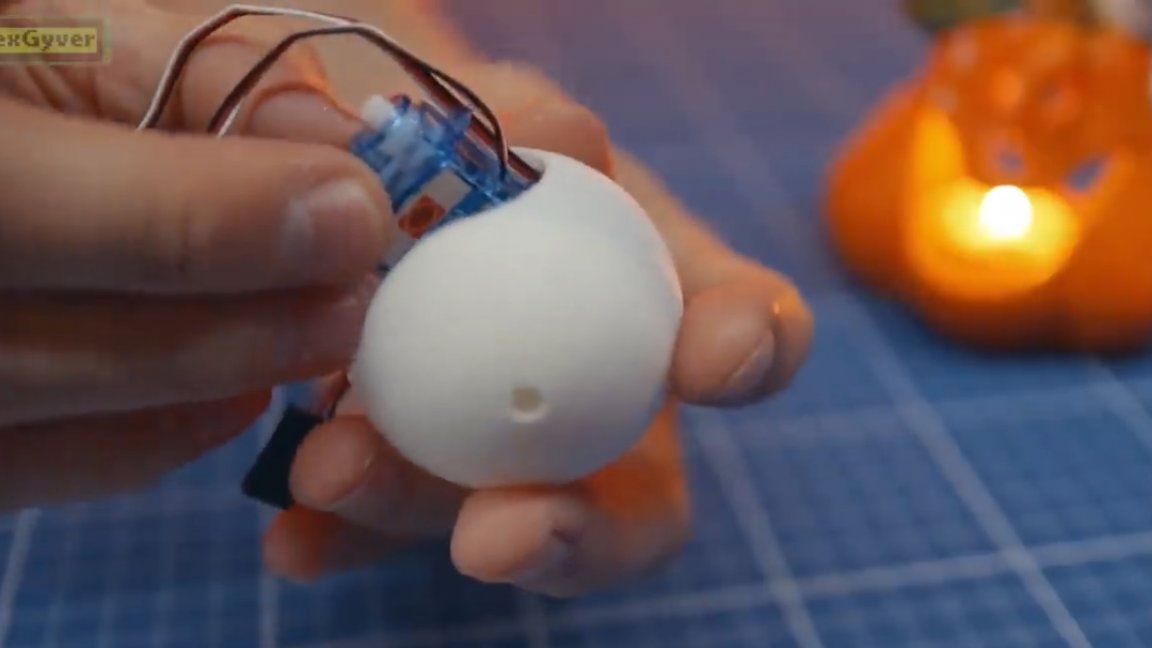
เราจดไดรฟ์ที่ยื่นออกมาไปที่ขอบมากและใส่เพลาส่งออกเข้าไปในรูด้านในตา

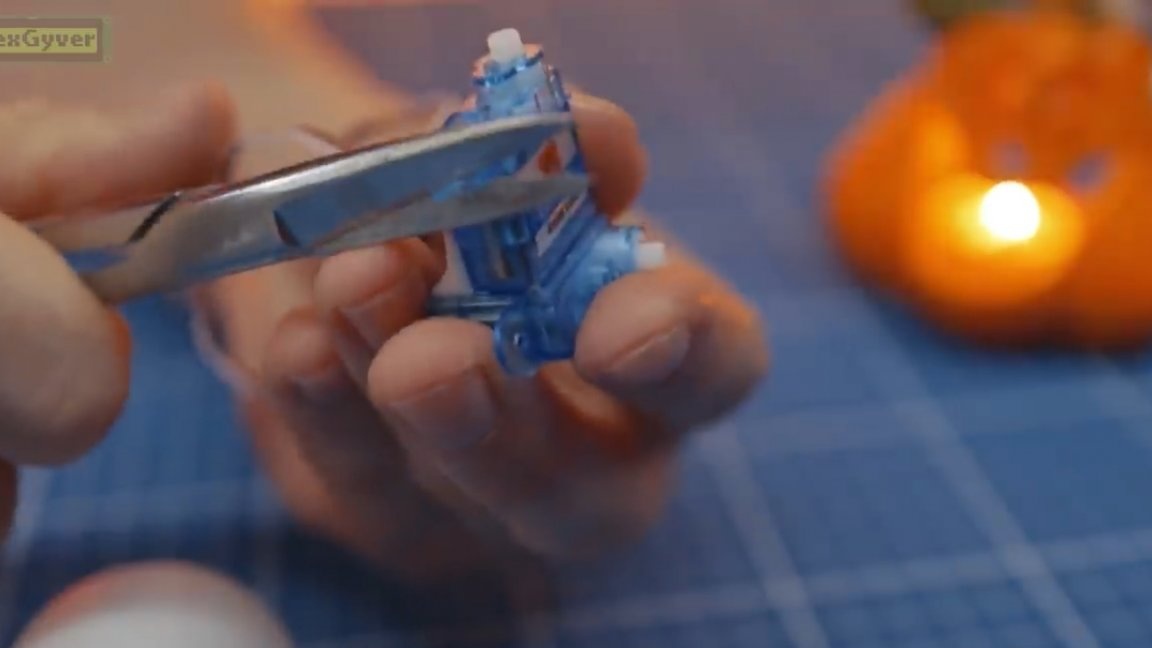
สกรูยาวที่สมบูรณ์จะต้องสั้นลงเล็กน้อย สิ่งนี้สามารถทำได้โดยใช้ก้ามปู

จากนั้นใช้สกรูสั้นลงเราแก้ไขไดรฟ์ภายใน
หากคุณมีเครื่องทดสอบเซอร์โวคุณสามารถตรวจสอบการทำงานของกลไกที่เกิดขึ้นได้
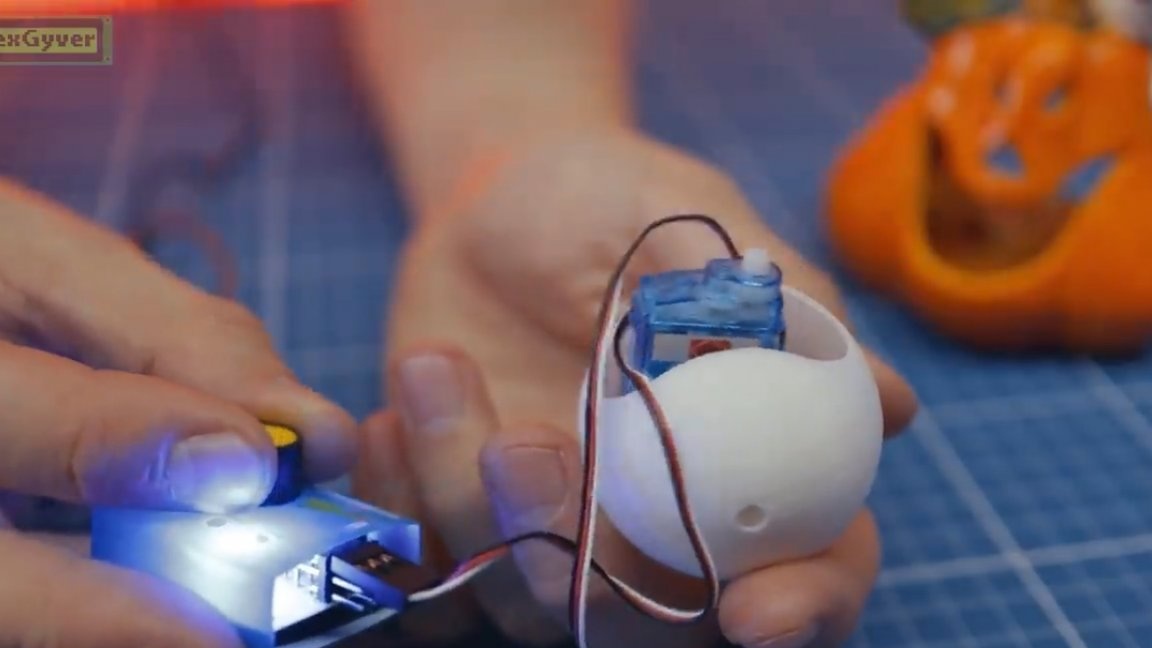
จากนั้นเราแนบส่วนที่สองของตาเข้ากับเพลาของไดรฟ์ที่สองและติดมัน

เราเชื่อมั่นในประสิทธิภาพโดยรวม (ควรทำงานร่วมกัน)


โดยเฉพาะอย่างยิ่งสำหรับโครงการนี้ผู้เขียนเขียนโค้ดง่าย ๆ ที่หมุนไดรฟ์ในมุมสุ่ม แต่จุดศูนย์กลางของดวงตานั้นมีลำเอียงเล็กน้อยดังนั้นเราจึงพบจุดศูนย์กลางที่แท้จริงและดึงนักเรียน

ทีนี้, เนื่องจากนี่เป็นโครงการวันหยุด, และวันหยุดค่อนข้างเจาะจง, ดังนั้นให้มันแย่ลงอีกหน่อย

ถัดไปใส่ชิ้นส่วนที่เป็นผลลงในแว่นตา

หากยังไม่ได้ใส่มันจำเป็นต้องลบมุมเล็กน้อย

จากนั้นเราก็รวมทุกอย่างเข้าด้วยกัน


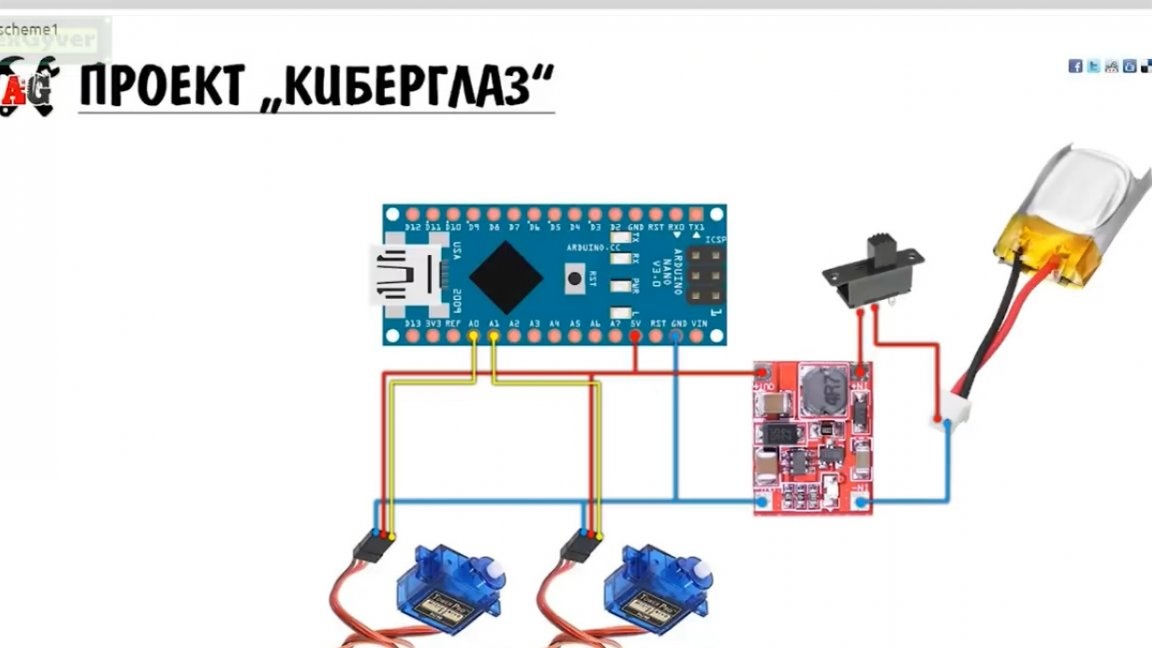
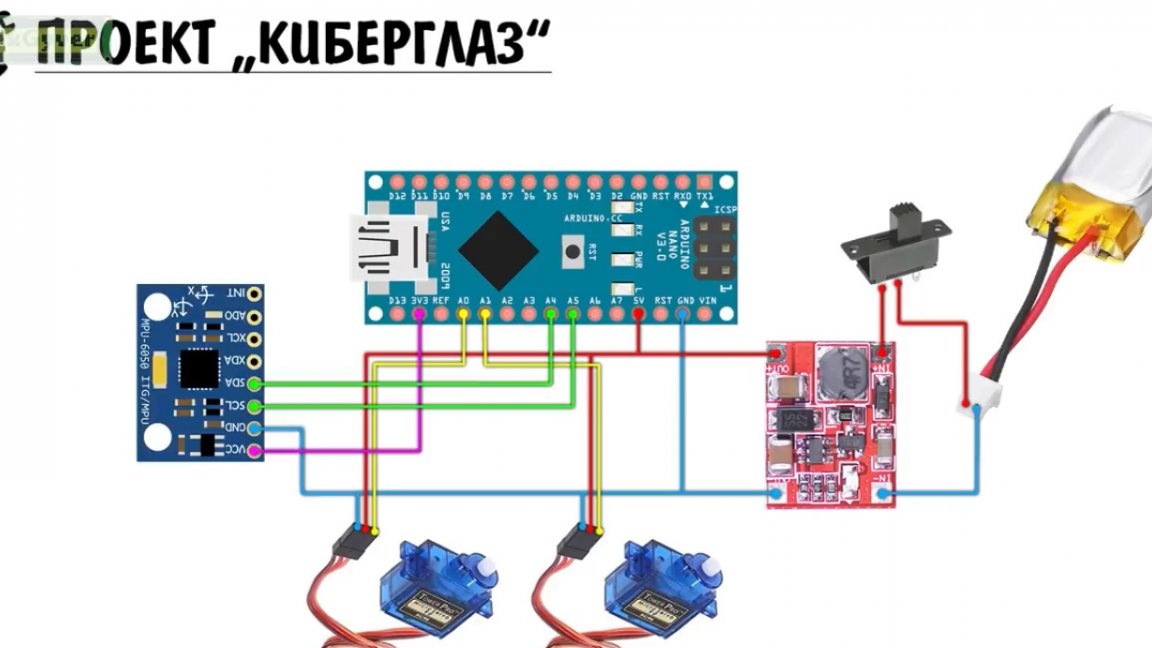
ต่อไปเราจะเชื่อมต่อส่วนประกอบทั้งหมดตามรูปแบบต่อไปนี้:
ทุกอย่างพร้อมแล้ว แต่ตอนนี้เรามีไดรฟ์ทุกตัวที่เพิ่มขึ้นเป็นมุมสุ่มและโดยหลักการแล้วคุณสามารถปล่อยให้มันเป็นอย่างนั้นได้

แต่จำตอนต้นของบทความที่ถูกกล่าวถึงเกี่ยวกับกลไกและระบบพิกัด? ดังนั้นกลไกจะหมุนไปตามแกนสองแกน แต่ไม่หมุนไปตามแนวที่ตาของมนุษย์หมุน เป้าหมายของเราคือการทำให้กลไกดังกล่าวมีลักษณะเหมือนกับดวงตาของมนุษย์ ดูเหมือนว่าเป็นไปไม่ได้ แต่คุณสามารถลองใช้ระบบพิกัดให้เป็นปกติเพื่อให้นักเรียนสามารถอยู่ในตำแหน่งที่ต้องการได้
ดังนั้นเรามีมุมสองมุมเราเขียนแทนด้วย X และ Y

Y คือมุมเล็ก ๆ ของดวงตาและ X คือมุมของการหมุนของตา 180 องศา
เพื่อให้บรรลุตำแหน่งที่เป็นไปได้ทั้งหมดมันเป็นสิ่งจำเป็นในการควบคุมทั้งสองมุมและมีความเฉพาะเจาะจง เริ่มจากการเคลื่อนไหวแบบวงกลมที่ง่ายที่สุดด้วยรัศมีสูงสุด
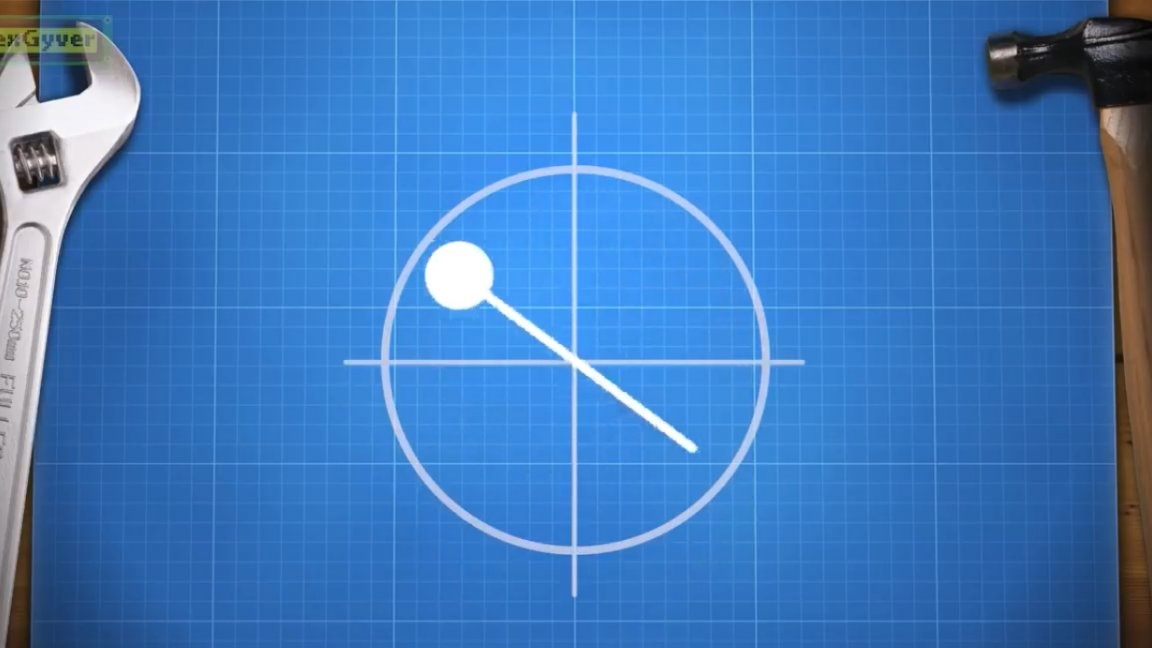
แต่มันไม่ง่ายอย่างที่เห็น ดังนั้นสิ่งแรกที่ผู้เขียนทำคือระบบพิกัดเชิงขั้วซึ่งคุณสามารถกำหนดมุมของการหมุนของตาและรัศมีนั่นคือการกำจัดรูม่านตาออกจากจุดศูนย์กลาง 00
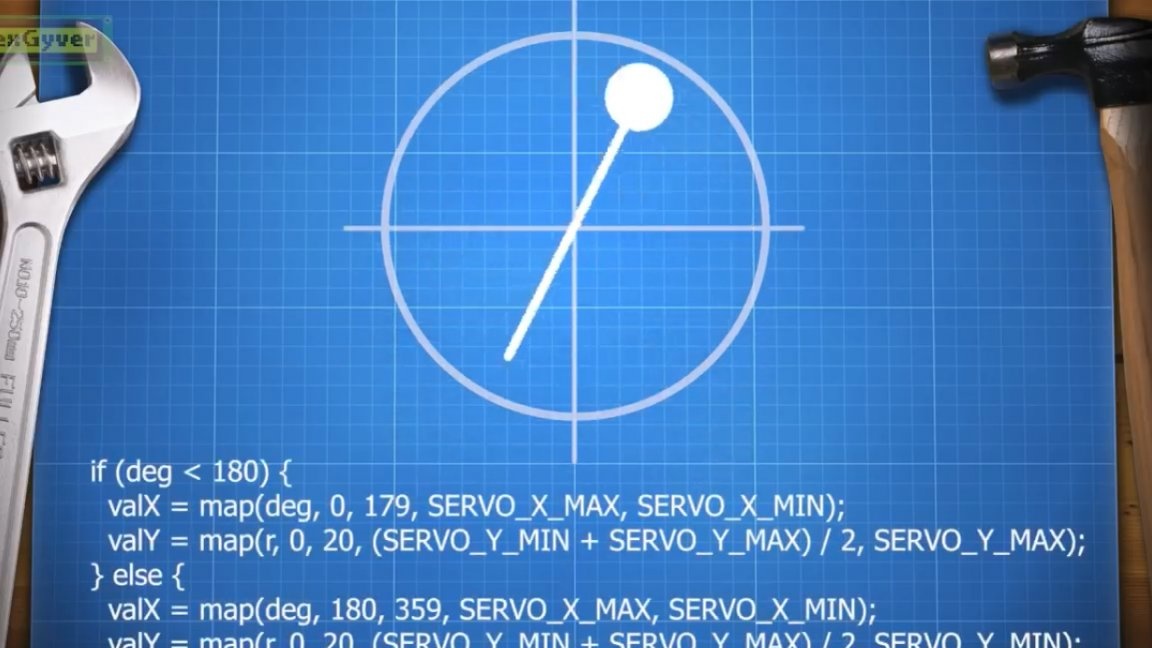

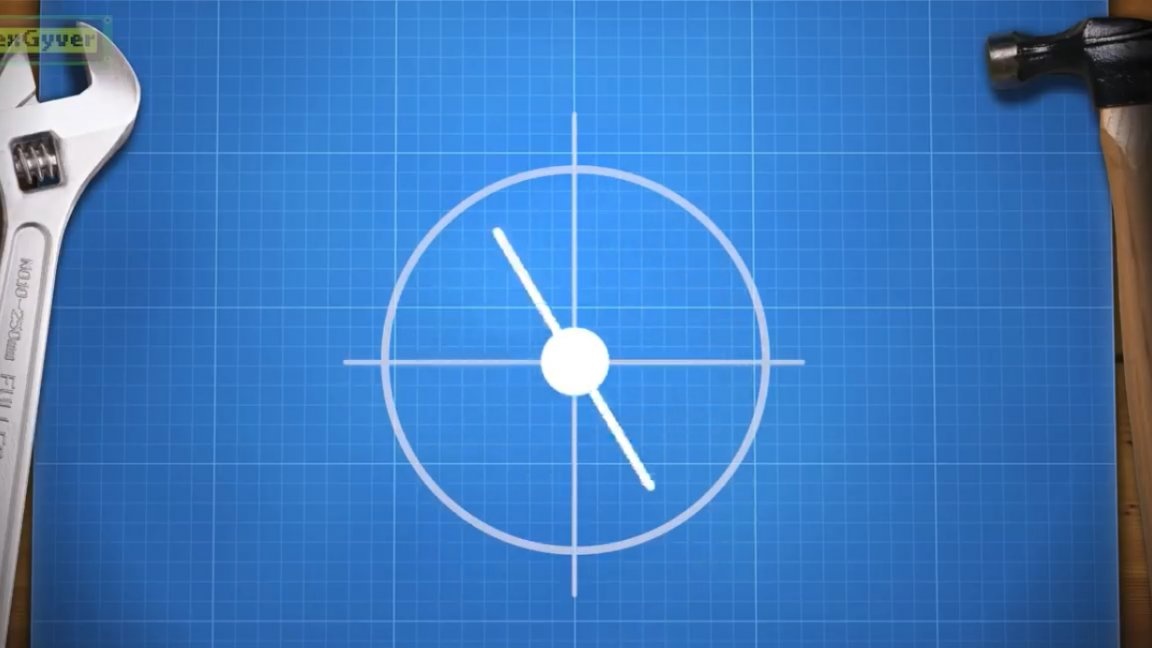
ในครึ่งวงกลมบนเราทำงานจากครึ่งมุม Y ถึงค่าสูงสุดและต่ำกว่า - จากต่ำสุดถึงครึ่ง ตอนนี้การเคลื่อนไหวของดวงตาสามารถตั้งโปรแกรมในวิธีที่น่าสนใจมากขึ้น การเคลื่อนไหวของตัวเองเป็นแบบสุ่ม แต่แล้วรอบวง


ตอนนี้เราจะบัดกรีอิเล็กทรอนิกส์ทั้งหมดทุกอย่างเป็นไปตามแผนภาพ:
กำลังพยายามเปิดใช้งาน
บ่งชี้คือ ตอนนี้เรากำลังซ่อนสิ่งทั้งหมดนี้ไว้ในอาคารบางประเภท (ในกรณีนี้ผู้เขียนใช้กล่องติ๊ก - ทู - แทค)

ดวงตาไซเบอร์ทั้งหมดของเราพร้อมแล้ว นี่เป็นเรื่องตลก


แต่เรายังคงทำการวิจัยเชิงทฤษฎีของเราต่อไปและแปลระบบพิกัดเชิงขั้วเป็นคาร์ทีเซียนหลังจากนั้นฉันจะเข้าใจว่าทำไม

ทุกอย่างง่ายที่นี่ฟังก์ชัน atan2 จะช่วยเราซึ่งจะคืนค่ามุมเป็นเรเดียนจาก –P ถึง P และฟังก์ชัน hypot ซึ่งจะคำนวณความยาวของด้านตรงข้ามมุมฉากในสองพิกัดเดียวกันและด้านตรงข้ามคือรัศมีสำหรับฟังก์ชันก่อนหน้าของเรา

และด้วยวิธีง่ายๆเช่นนี้ผู้ทดลองของเราสามารถหันหน้าไปทางตรงตามที่เราต้องการได้ (ขึ้น, ลง, ขวา, ซ้าย)

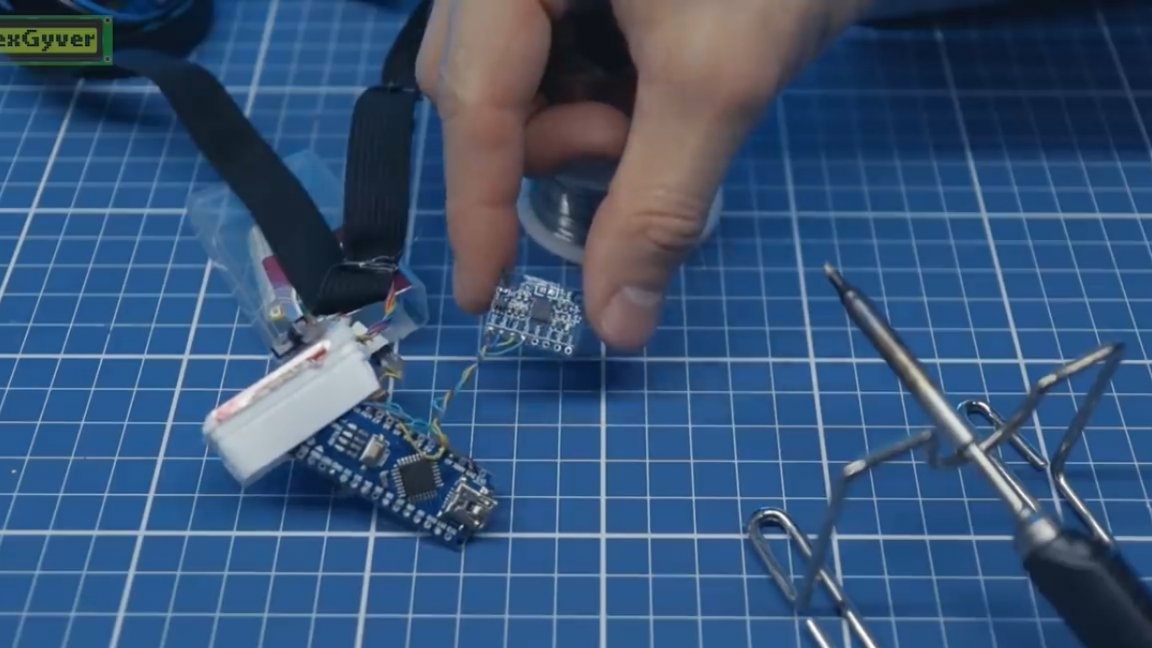
เหตุใดจึงต้องมีสิ่งนี้ นี่เป็นสิ่งจำเป็นเพื่อที่จะสามารถเพิ่ม เครื่องมือวัดการหมุนวนด้วยความช่วยเหลือจากที่ตาจะหันไปในทิศทางเดียวกันกับหัวซึ่งอาจจะดูค่อนข้างตลก ที่จริงแล้วมีการเพิ่มโครงการ gyroscope mpu6050นี่คือลักษณะที่ปรากฏในแผนภาพ:
เปลี่ยนรหัสตรวจสอบให้แน่ใจว่าการอ่านจากการหมุนวนเบี่ยงเบนสายตา ผ่านตัวกรองตามธรรมชาติ

แล้วเราจะได้อะไรในที่สุด? ดวงตานั้นค่อนข้างช้าไปทางด้านหลังของศีรษะดังนั้นการสร้างเอฟเฟกต์ที่จะเลี้ยวขวาและมองคุณ ดังนั้นนี่คือโครงการคณิตศาสตร์เล็ก ๆ น้อย ๆ

การแทรก ที่นี่. ขอบคุณสำหรับความสนใจของคุณ แล้วพบกันเร็ว ๆ นี้!
วิดีโอของผู้แต่ง: