ท่านอาจารย์มีความสนใจในเครื่องบินจำลองมานานแล้ว ตอนแรกมันเป็นแบบจำลองของเครื่องบินแล้วก็ควอดคอปเตอร์ ในบทความนี้พ่อมดจะบอกคุณว่าควรเลือกใช้วัสดุรูปสี่เหลี่ยมจตุรัสรวมทั้งวิธีทำวัสดุจากไม้อัด มาดูวิดีโอสาธิตสั้น ๆ
ในการสร้าง Quadrocopter นั้นหัวหน้าได้ใช้สิ่งต่อไปนี้
เครื่องมือและวัสดุ:
- ไม้อัดเบิร์ช
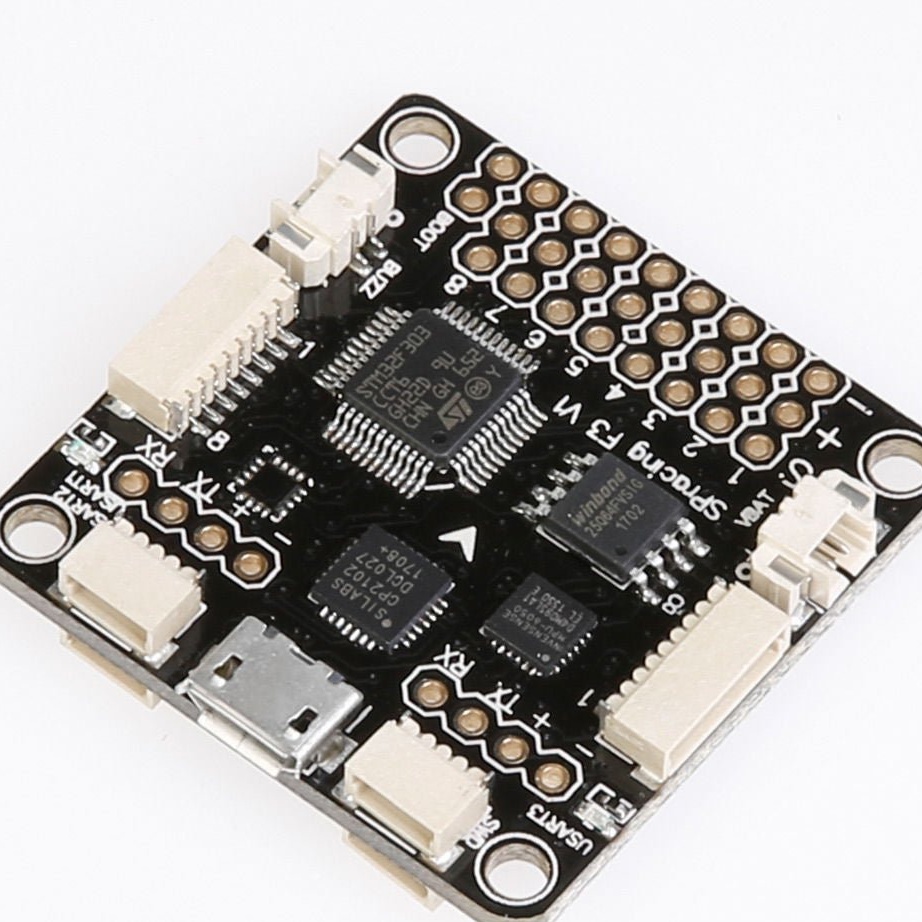
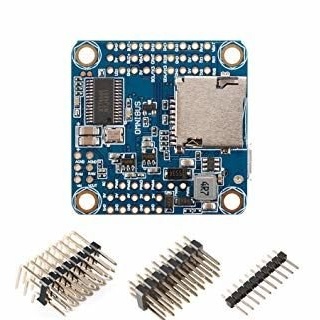
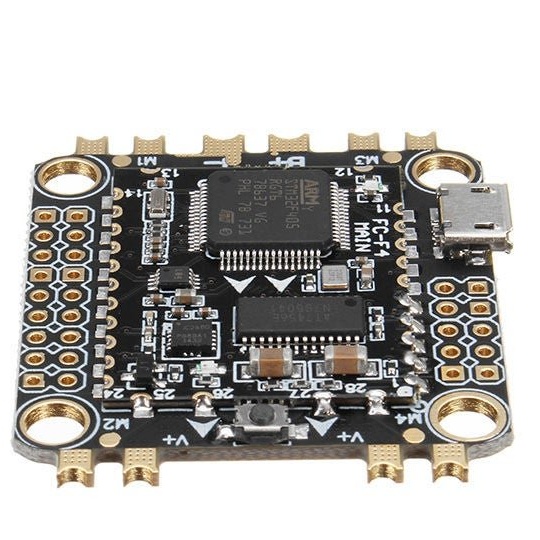
- ตัวควบคุม Omnibus F4, SP Racing F3;
-Mateck คณะกรรมการการกระจายอำนาจ;
- คอนโทรลเลอร์ HGLRC 28A BLHeli ESC - 4 ชิ้น;
- Motor Racestar BR2204 2600Kv Racing Edition -4 ชิ้น;
- ใบพัดคิงคอง 5X4X3 - 4 ชิ้น
- โมดูลวิทยุ Flsky TH9X พร้อมตัวรับสัญญาณ;
แบตเตอรี่ Gens 3800 mAh;
ทน; - 16 ชิ้น;
- ไข M3;
- ไขควง
- อุปกรณ์เสริมสำหรับทิ้ง;
-Nozh;
- เครื่องตัดซีเอ็นซี;
ขั้นตอนที่หนึ่ง: การเลือกวัสดุ
กรอบ
โดยปกติแล้วเฟรมทำจากส่วนประกอบที่มีน้ำหนักเบาและแข็งเช่นไฟเบอร์กลาส, คาร์บอนไฟเบอร์, ไม้, อลูมิเนียมเป็นต้นมีเฟรมหลายประเภทที่แตกต่างกันต้นแบบจะสร้างเฟรมสำหรับเครื่องยนต์สี่เครื่องยนต์
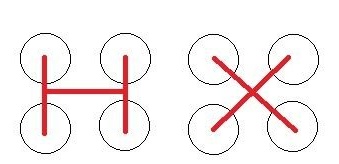
เฟรมดังกล่าวส่วนใหญ่อยู่ในรูปแบบ H-form หรือ X-form X-shape เป็นความสมดุลที่ดีระหว่างความมั่นคงและความคล่องแคล่ว มันเป็นเฟรมนี้ที่อาจารย์จะทำ

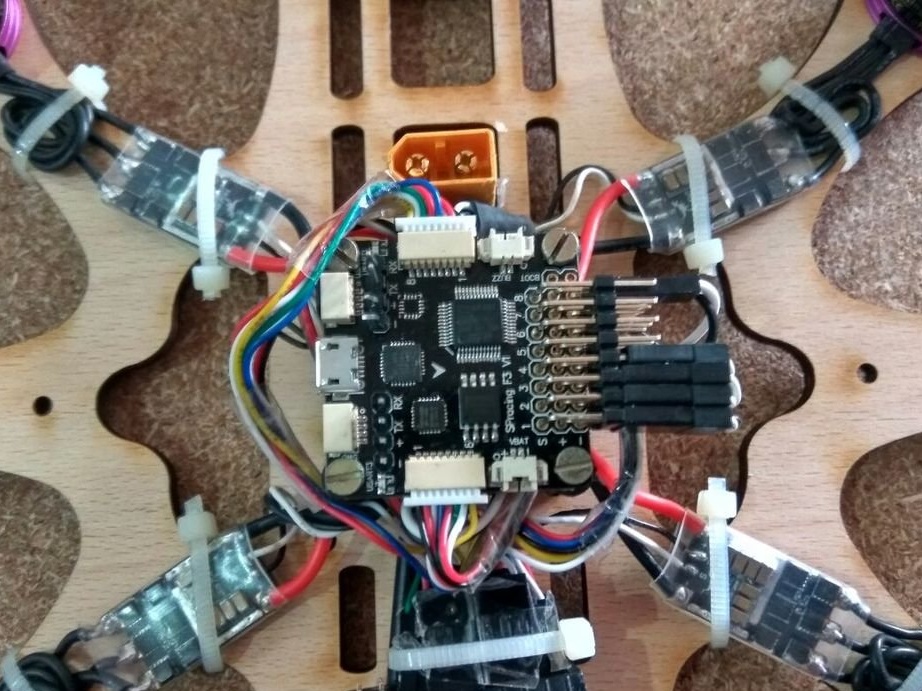
ตัวควบคุม
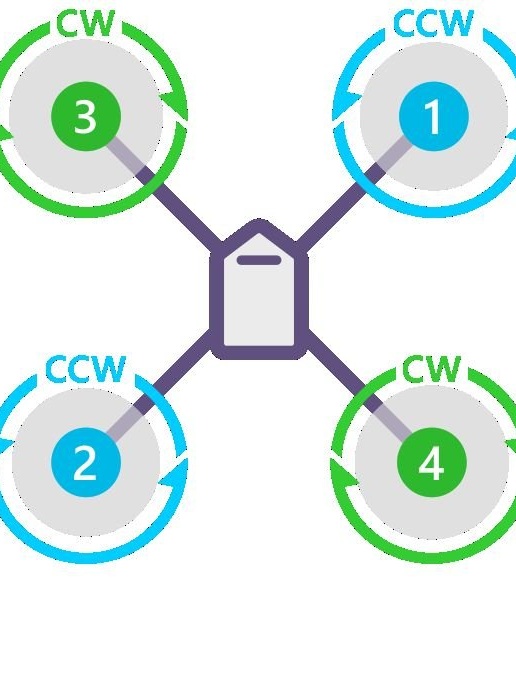
ตัวควบคุมควบคุมการทำงานของเครื่องยนต์ แผนภาพแสดงให้เห็นว่าเครื่องยนต์ทั้งหมดหมุนไปในทิศทางตรงกันข้ามเพื่อแก้แรงบิดที่เกิดจากเครื่องยนต์แต่ละตัว คอนโทรลเลอร์เป็นสมองของ Quadrocopter โดยทั่วไปมันเป็นคอมพิวเตอร์ขนาดเล็กที่ใช้เซ็นเซอร์ในการวัดมุมและความเร็วอย่างต่อเนื่อง
ตัวควบคุมเที่ยวบินส่วนใหญ่จะถูกจัดประเภทตามข้อกำหนดของโปรเซสเซอร์

เครื่องยนต์
มอเตอร์มีสองประเภทคือมอเตอร์แบบไร้แปรงและมอเตอร์แบบไร้แปรง Quadrocopters ส่วนใหญ่ใช้มอเตอร์แบบไร้แปรงที่สามารถตอบสนองต่อการเปลี่ยนแปลงความเร็วและแรงบิดที่ต้องการได้อย่างรวดเร็ว สำหรับมอเตอร์ชนิดไร้แปรงพิเศษ อิเล็กทรอนิกส์ ตัวควบคุมความเร็ว (ESC)
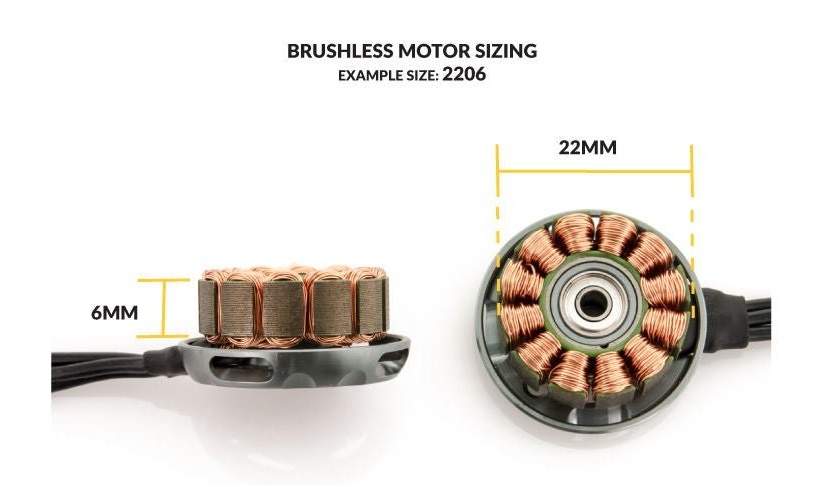
ขนาดของมอเตอร์แบบไร้แปรงนั้นระบุด้วยตัวเลข 4 หลักคือ AABB “ AA” คือความกว้างสเตเตอร์และ“ BB” คือความสูงของสเตเตอร์หรือเส้นผ่านศูนย์กลางสเตเตอร์ทั้งในหน่วยมิลลิเมตร (มิลลิเมตร) ตัวอย่างเช่น Racestar BR2205 มีสเตเตอร์ที่มีขนาดเส้นผ่าศูนย์กลางประมาณ 22 มม. และความสูงประมาณ 05 มม.
ในความเป็นจริงยิ่งสเตเตอร์สูงเท่าไรก็ยิ่งมีพลังมากขึ้นด้วยความเร็วที่สูงขึ้นและยิ่งสเตเตอร์กว้างขึ้นเท่าไหร่แรงบิดก็ยิ่งมากขึ้นเมื่อความเร็วต่ำลงเท่านั้น
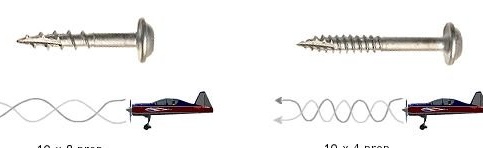
ค่า KV ของมอเตอร์ระบุความเร็วที่มอเตอร์หมุนเมื่อคุณใช้ 1 โวลต์กับขดลวดมันถูกกำหนดโดยจำนวนขดลวดของลวดทองแดงในมอเตอร์สเตเตอร์และแรงแม่เหล็กของแม่เหล็ก
ขดลวดที่น้อยลงหมายถึงความต้านทานน้อยลงและรอบต่อนาทีที่สูงขึ้น นี่คือสาเหตุที่เครื่องยนต์ที่มี KV สูงกว่ามักจะมีขดลวดสเตเตอร์น้อย
KV กำหนดสกรูตัวที่คุณสามารถใช้กับเครื่องยนต์ KV ที่ต่ำกว่าสกรูที่ใหญ่กว่าก็สามารถหมุนได้และในทางกลับกัน ไม่สามารถเพิ่มแรงยกได้โดยการติดตั้งสกรูขนาดใหญ่ของเครื่องยนต์ที่มี KV สูงกว่าเนื่องจากความต้องการแรงบิดจะเกินกำลังที่อนุญาตและเครื่องยนต์จะร้อนเกินไป
ตัวอย่างเช่น: มอเตอร์ BR2205 2600 kV สามารถทำงานกับสกรูขนาด 5x4 นิ้วและมอเตอร์ BR2212 ขนาด 1,000 kV สามารถใช้งานได้กับสกรูขนาด 10x4.5 นิ้ว
KV ไม่ได้หมายถึงตัวบ่งชี้กำลังเครื่องยนต์ออกเครื่องยนต์ที่มี KV สูงกว่านั้นไม่จำเป็นต้องทรงพลังมากกว่าเครื่องยนต์ที่มี KV ต่ำกว่า


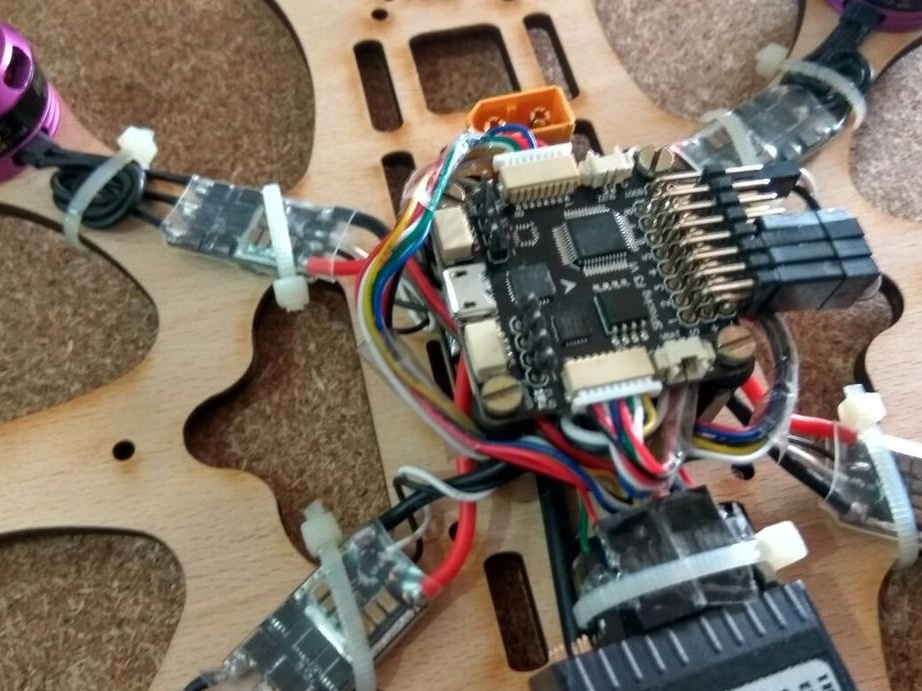
ตัวควบคุมความเร็วอิเล็กทรอนิกส์ (ESC)
ความก้าวหน้าล่าสุดของมินิควอคอปเตอร์ได้ถูกสร้างขึ้นโดยการควบคุมความเร็วอิเล็กทรอนิกส์ขนาดเล็กที่ทำให้มอเตอร์ไร้แปรงทำงาน การทำงานของตัวควบคุมความเร็วอิเล็กทรอนิกส์คือการรับสัญญาณปีกผีเสื้อจากตัวควบคุมเที่ยวบินและรักษาการหมุนของเครื่องยนต์ตามความเร็วที่กำหนด
เทคโนโลยีจำนวนหนึ่งทำงานในอุปกรณ์ขนาดเล็กเหล่านี้ซึ่งอยู่นอกเหนือขอบเขตของคู่มือนี้ เมื่อซื้อให้เลือก ESC ที่มีกระแสตรงที่ได้รับการจัดอันดับอย่างน้อย 20% มากกว่าที่คำนวณไว้


ใบพัด
ใบพัดเปลี่ยนพลังงานกลของเครื่องยนต์เป็นแรงฉุด ขนาดและรูปร่างของใบพัดมีบทบาทอย่างมากต่อประสิทธิภาพการบิน
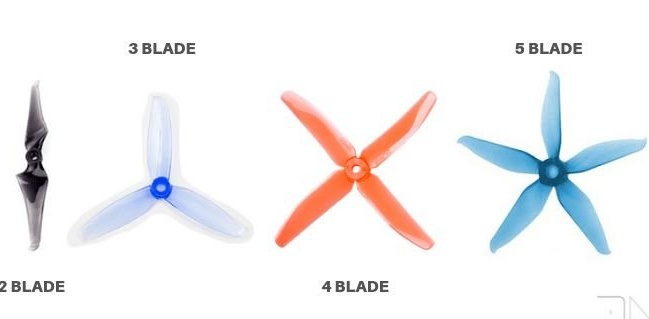
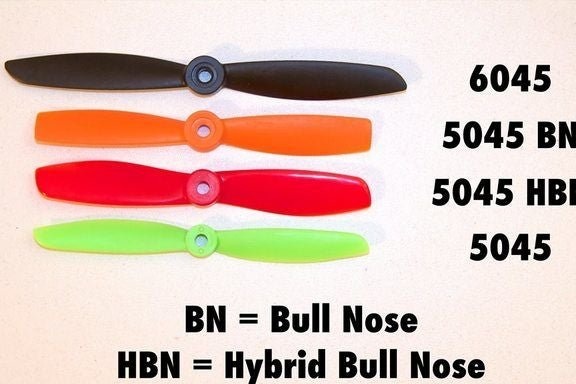
รูปแบบมี 2 ประเภทที่ผู้ผลิตใช้: L x P x B | LLPP x B. โดยที่ L คือความยาว P คือระยะห่าง B คือจำนวนของใบมีด
ใบพัดสามารถทำจากวัสดุต่าง ๆ เช่นพลาสติกคอมโพสิตคาร์บอนไฟเบอร์ไม้ ฯลฯ วัสดุแต่ละชนิดมีลักษณะเฉพาะเช่นคาร์บอนไฟเบอร์และไม้มีความแข็งแกร่งและเป็นที่รู้จักสำหรับการทำงานที่ราบรื่นและพลาสติกบางชนิดมีความทนทานอย่างยิ่ง สกรูส่วนใหญ่ที่ใช้ในมินิควอเธอร์โคเตอร์ทำจากวัสดุผสมพลาสติก
ขนาดของใบพัดที่คุณสามารถใช้ได้จะถูก จำกัด ด้วยขนาดของเฟรมรวมถึงพลัง HF ของเครื่องยนต์ ตามกฎแล้วใบพัดที่คุณสามารถใช้เพื่อสร้างแรงขับที่แน่นอนยิ่งมีประสิทธิภาพมากขึ้นเท่านั้น สำหรับมินิ Quadrocopters พวกเขาแตกต่างกันระหว่างสกรู 5-6 นิ้วเพิ่มทีละ 4-5 นิ้ว
จำนวนใบมีดมีผลต่อการยึดเกาะและการใช้พลังงาน ใบมีดมากขึ้นแรงฉุดมากขึ้นและพลังงานที่สูญเสียมากขึ้น

แบตเตอรี่
ปัจจุบันโดรนส่วนใหญ่ใช้แบตเตอรี่ลิเธียมโพลิเมอร์ที่รู้จักกันทั่วไปว่าเป็นแบตเตอรี่ Lipo แบตเตอรี่พร้อมกับ ESC และเครื่องยนต์เป็นระบบพลังงาน Quadrocopter
อย่าคิดว่าแบตเตอรี่เป็นแหล่งพลังงานมอเตอร์สามารถดึงแอมแปร์จำนวนมหาศาลในช่วงเวลาสั้น ๆ แบตเตอรี่ LiPo เป็นชุดของเซลล์ซึ่งแต่ละตัวมีแรงดันเล็กน้อยที่ 3.7 โวลต์หากต้องการแรงดันไฟฟ้าที่สูงกว่าเซลล์เหล่านี้สามารถเชื่อมต่อแบบอนุกรมเพื่อสร้างแบตเตอรี่หนึ่งก้อน แบตเตอรี่ที่ต่อแบบอนุกรมจะทำเครื่องหมายด้วยตัวอักษร“ S” และขนานกับตัวอักษร“ P”
ยิ่งมีเซลล์เชื่อมต่อกันเป็นอนุกรมยิ่งมีแรงดันไฟฟ้าสูงกว่าและยิ่งมีเซลล์ขนานกันมากเท่านั้น
ตัวอย่างเช่น
1S = 1 เซลล์ = 3.7 V
2S = 2 cells = 7.4 V
3S = 3 cells = 11.1 V
4S = 4 เซลล์ = 14.8 V
5S = 5 cells = 18.5 V
6S = 6 เซลล์ = 22.2 V
กำลังการผลิตระบุในหน่วยมิลลิแอมป์หรือ“ mAh” นี่คือจำนวนแอมแปร์ที่แบตเตอรี่สามารถจัดส่งได้ในหนึ่งชั่วโมง ตัวอย่างเช่นแบตเตอรี่ 3S 2000 mAh สามารถให้ 2 A เป็นเวลา 1 ชั่วโมง ดังนั้นหาก quadcopter ของคุณดึง 20A ดังนั้นการบินจะดำเนินต่อไป 2/20 * 60 นาที = 6 นาที
คายประจุเล็กน้อยระบุความเร็วสูงสุดที่คุณสามารถวาดกระแสจากแบตเตอรี่ มันถูกระบุด้วยหมายเลข "C" ที่ด้านบน ยิ่งให้คะแนน C สูงเท่าไหร่ปริมาณของแบตเตอรี่ก็จะยิ่งมากขึ้นเท่านั้น
ตัวอย่างเช่นแบตเตอรี่ขนาด 2000 mAh 25C สามารถส่งได้ถึง 2000x25 = 50,000 mA หรือ 50 A



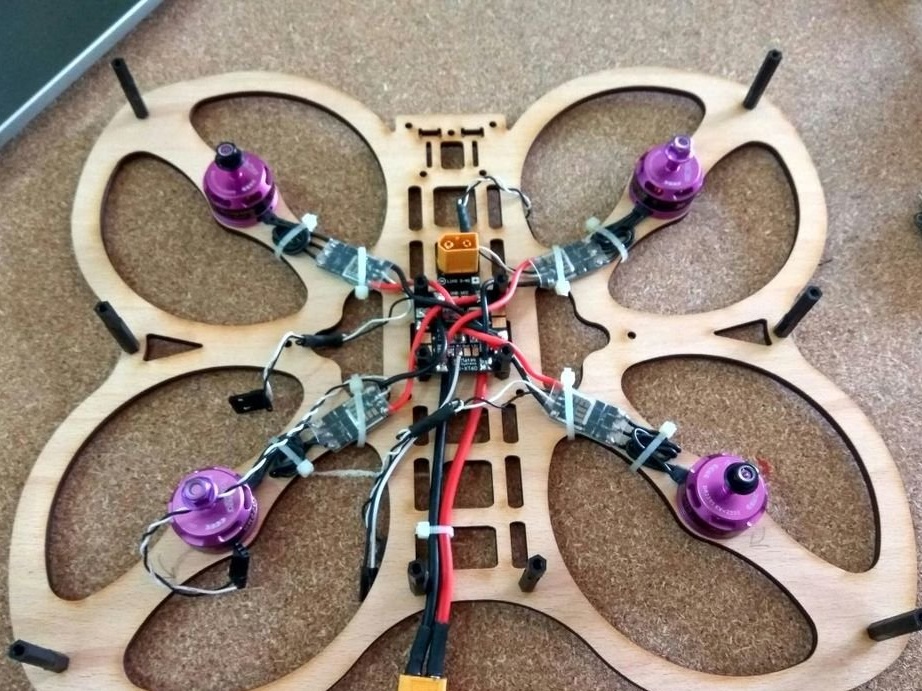
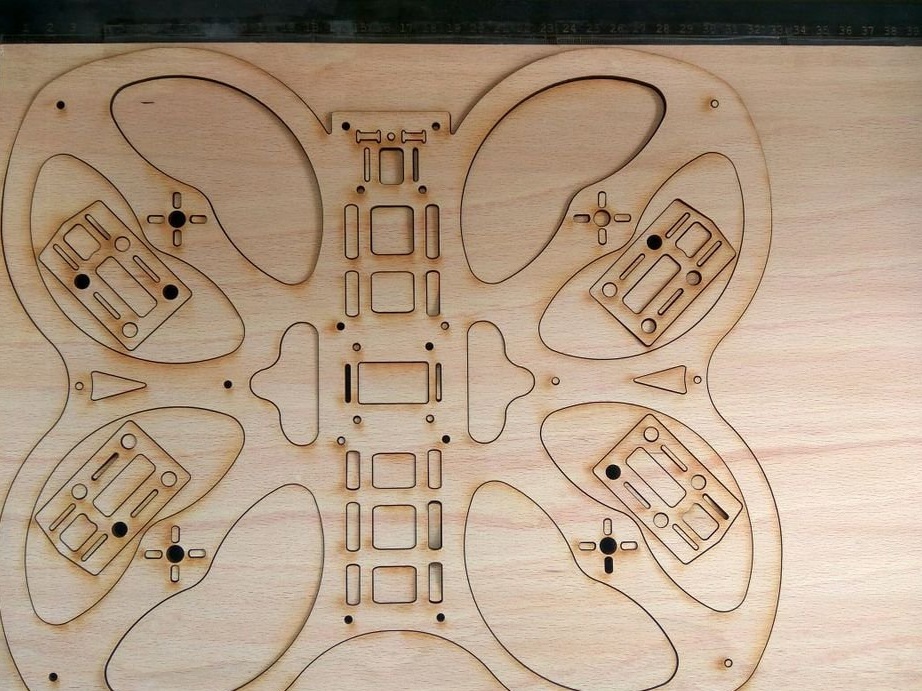
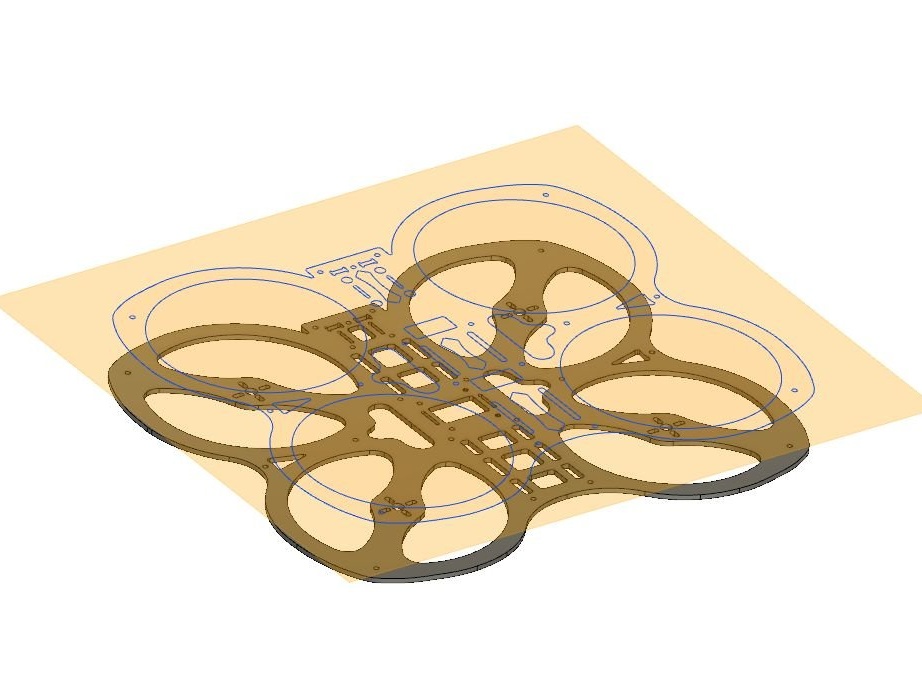
ขั้นตอนที่สอง: ออกแบบและประกอบเฟรม
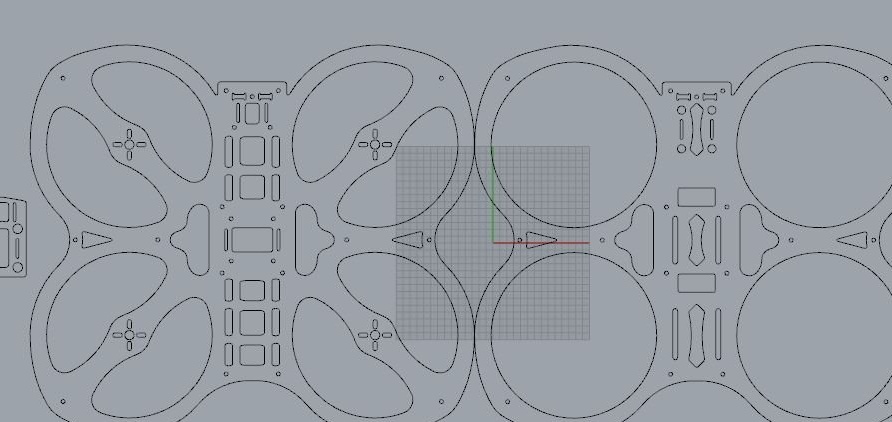
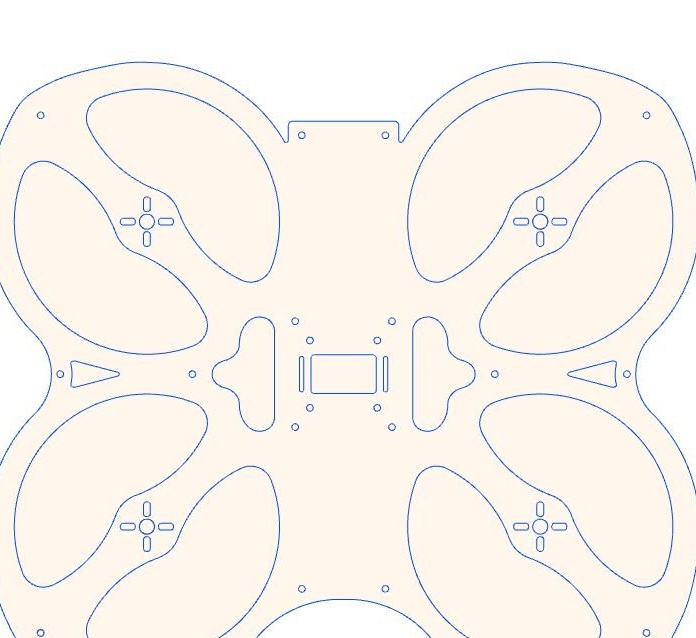
การออกแบบกรอบได้รับแรงบันดาลใจจากรูปทรงผีเสื้อของราชาเมื่อคุณดูที่เฟรมจากด้านบนมันดูเหมือนปีกสองข้าง
ตัวช่วยสร้างได้รับการออกแบบใน Fusion 360 และ Rhino CAD ขนาดเฟรมประมาณ 230 มม. มันเป็นเพราะระยะห่างในแนวทแยงจากศูนย์กลางเครื่องยนต์หนึ่งไปยังอีก ขนาดเฟรมที่นิยมมากที่สุดคือ 210 มม., 250 มม. เป็นต้นเมื่อคุณตั้งค่าขนาดเฟรมแล้วให้วาดที่ยึดเครื่องยนต์
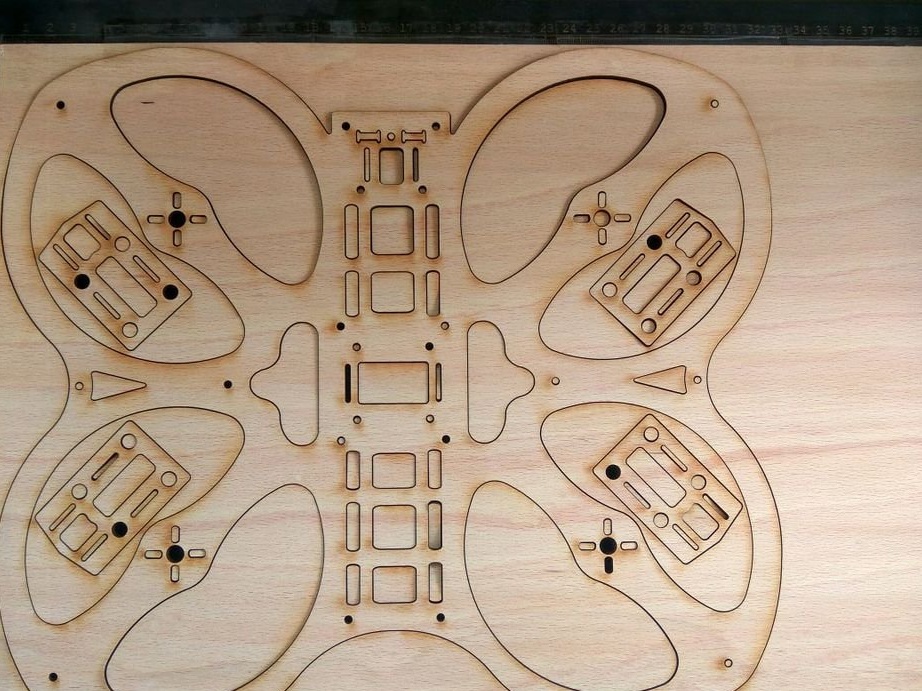
อาคารกลางเป็นสถานที่ที่จะติดตั้งอุปกรณ์อิเล็กทรอนิกส์ทั้งหมดรวมถึงตัวควบคุมการบินตัวรับสัญญาณแบตเตอรี่ ฯลฯ ที่จุดกึ่งกลางจะมีรู M3 3 รูที่ระยะ 30.5 มม. จากกัน
รายการนี้ทำโดยใช้การตัดด้วยเลเซอร์ หากคุณไม่มีเครื่องตัดคุณสามารถตัดในเวิร์กช็อป ไฟล์สำหรับตัดสามารถดาวน์โหลดได้ด้านล่าง
ไฟล์ Design.rar









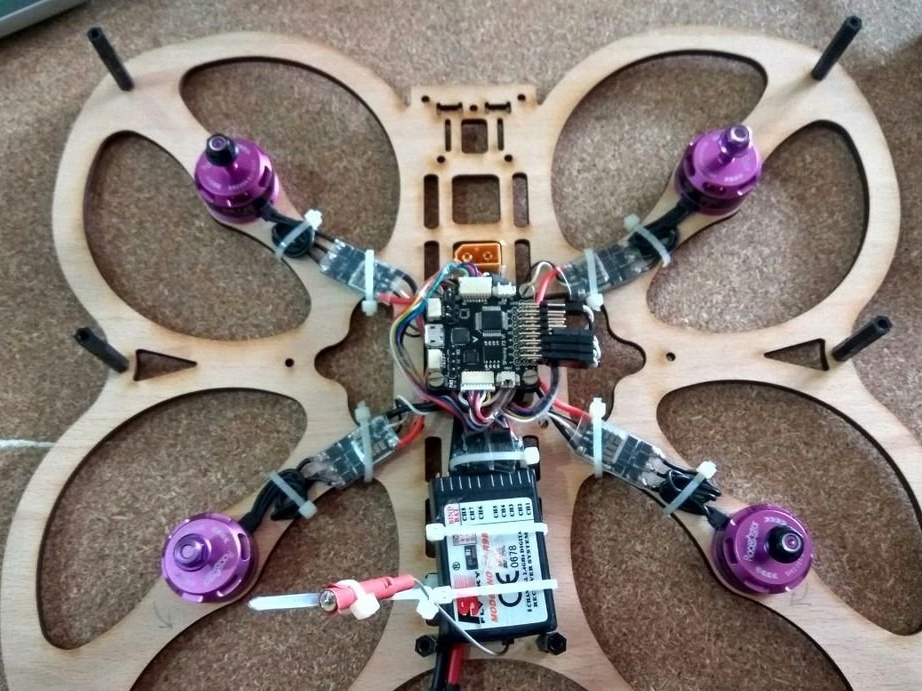
ขั้นตอนที่สาม: สร้าง
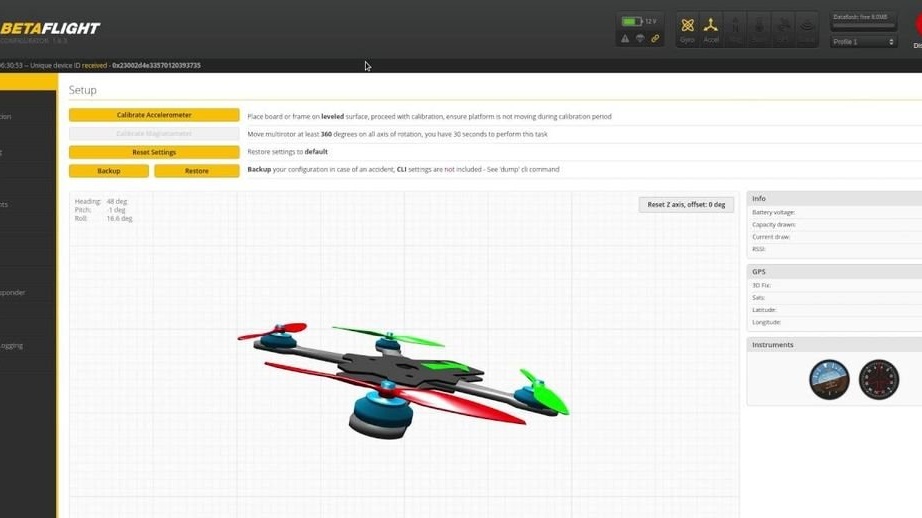
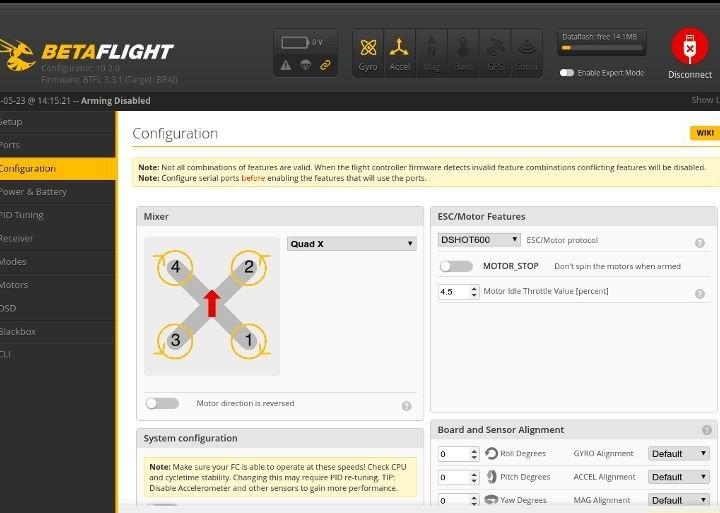
ตอนนี้คุณต้องรวบรวมควอดคอปเตอร์
ก่อนอื่นคุณต้องทำการแฟลชคอนโทรลเลอร์ด้วย Betaflight เฟิร์มแวร์ จากนั้นปรับเทียบเซ็นเซอร์ เชื่อมต่อโมดูลวิทยุและตรวจสอบการทำงาน ติดตั้งมอเตอร์บนเฟรมตามแผนผังของ X-frame พร้อมทิศทางการหมุนที่ถูกต้อง ประสานมอเตอร์นำไปสู่ขั้ว ESC และยึด ESC เข้ากับตัวยึด ติดตั้งบอร์ดจ่ายพลังงานและประสานแผ่นอิเล็กโทรด ESC เชื่อมต่อ Soler XT60 เข้ากับสายไฟแล้วไปยังบอร์ดจ่ายไฟ แก้ไขตัวควบคุม เชื่อมต่อสายไฟจาก ESC เข้ากับคอนโทรลเลอร์เที่ยวบิน ติดตั้งตัวรับสัญญาณบนเฟรม วางบนฝาครอบด้านบน