
ตัวช่วยสร้างสร้างอุปกรณ์ที่ใช้งานได้ในระดับดิจิตอล + ไม้บรรทัด + ไม้โปรแทรกเตอร์ + วัดเทป อุปกรณ์มีขนาดเล็กพอที่จะใส่ในกระเป๋าได้และชาร์จแบตเตอรี่ได้อย่างง่ายดายโดยใช้เครื่องชาร์จโทรศัพท์
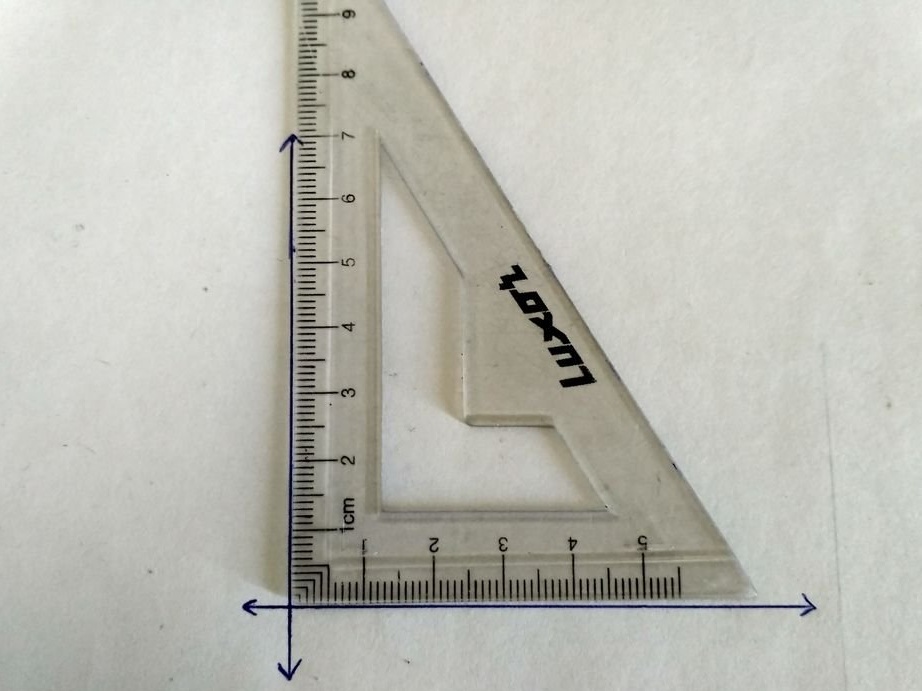
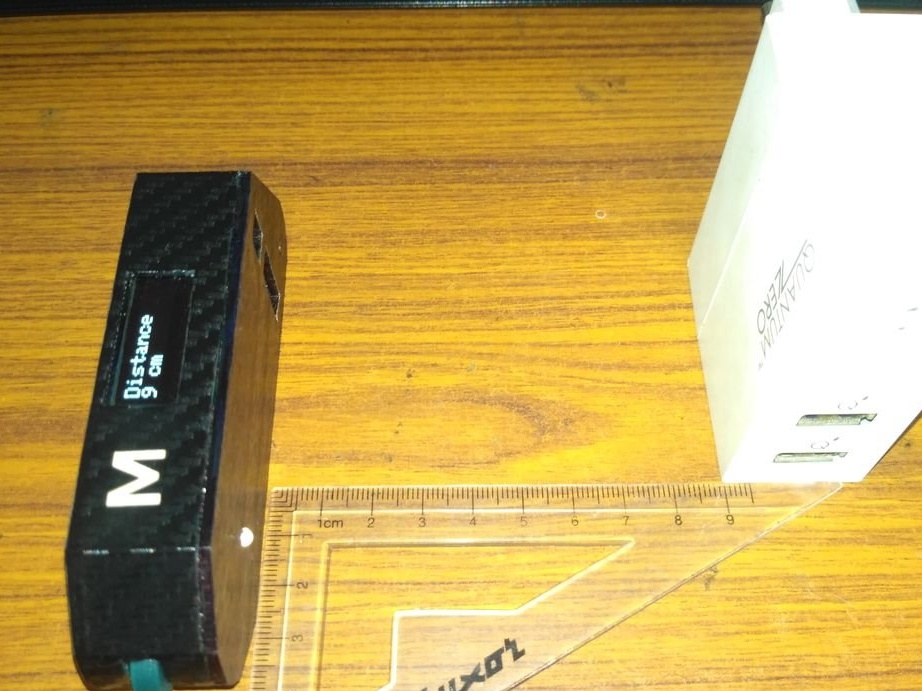
อุปกรณ์นี้ใช้เซ็นเซอร์วัดความเร่งและเซ็นเซอร์วัดการหมุนวนอย่างแม่นยำในการวัดระดับและมุมเซ็นเซอร์ IR สำหรับการวัดแบบไม่สัมผัสความยาวเชิงเส้นตั้งแต่ 4 ถึง 30 ซม. เซ็นเซอร์ที่มีล้อซึ่งสามารถรีดได้ตามพื้นผิวโค้งหรือเส้นโค้งเพื่อวัดความยาวของวัตถุ
การนำทางผ่านโหมดและฟังก์ชั่นของอุปกรณ์นั้นดำเนินการโดยใช้ปุ่มสัมผัสที่กำหนดเป็น M (โหมด), U (หน่วย) และ 0 (ศูนย์)
M - ตัวเลือกระหว่างการวัดประเภทต่าง ๆ
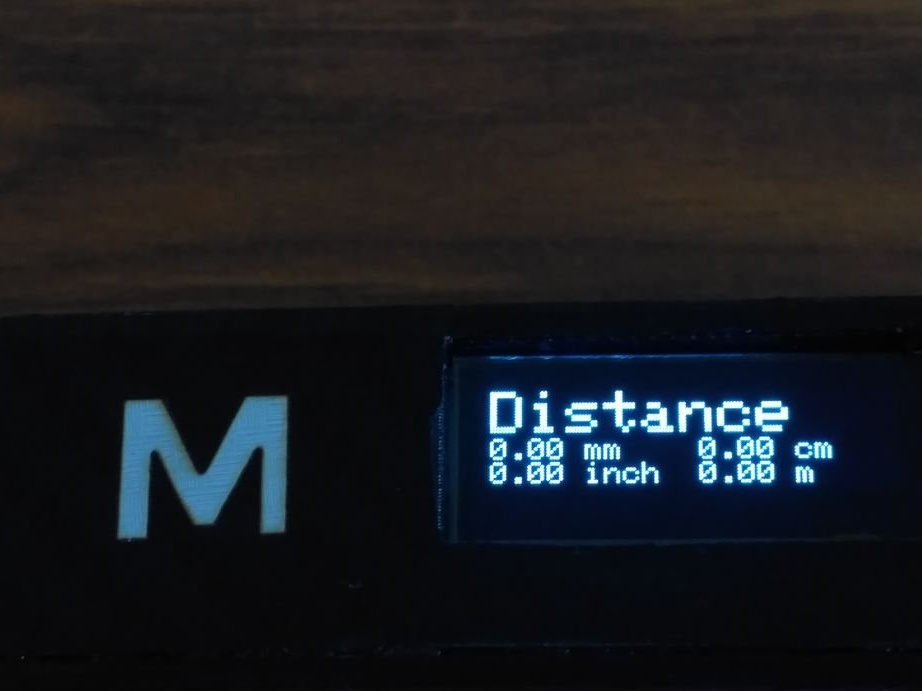
U - เพื่อเลือกระหว่างหน่วยของการวัด mm, cm, inches และ meter
0 - รีเซ็ตค่าที่วัดได้เป็น 0 หลังจากวัดระยะทางหรือมุม
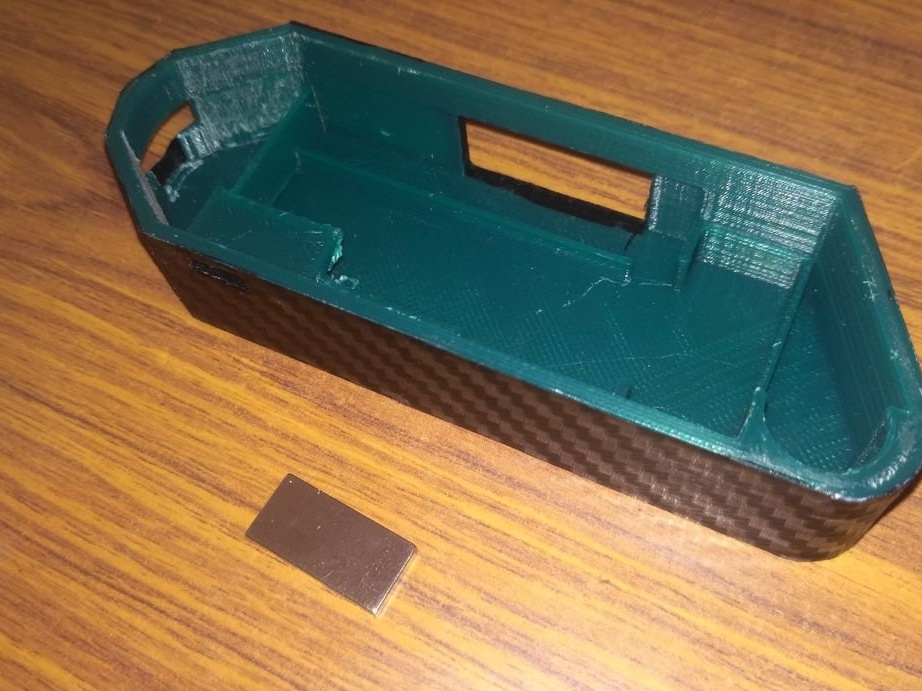
อุปกรณ์นี้มีแม่เหล็กนีโอไดเมียมติดตั้งอยู่ภายในฐานเพื่อไม่ให้ลื่นและไม่เลื่อนออกจากพื้นผิวโลหะที่ถูกวัด
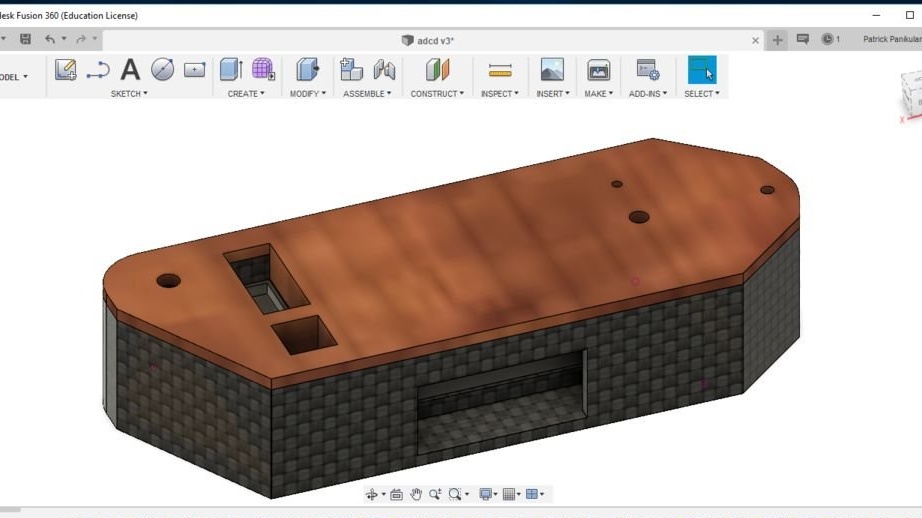
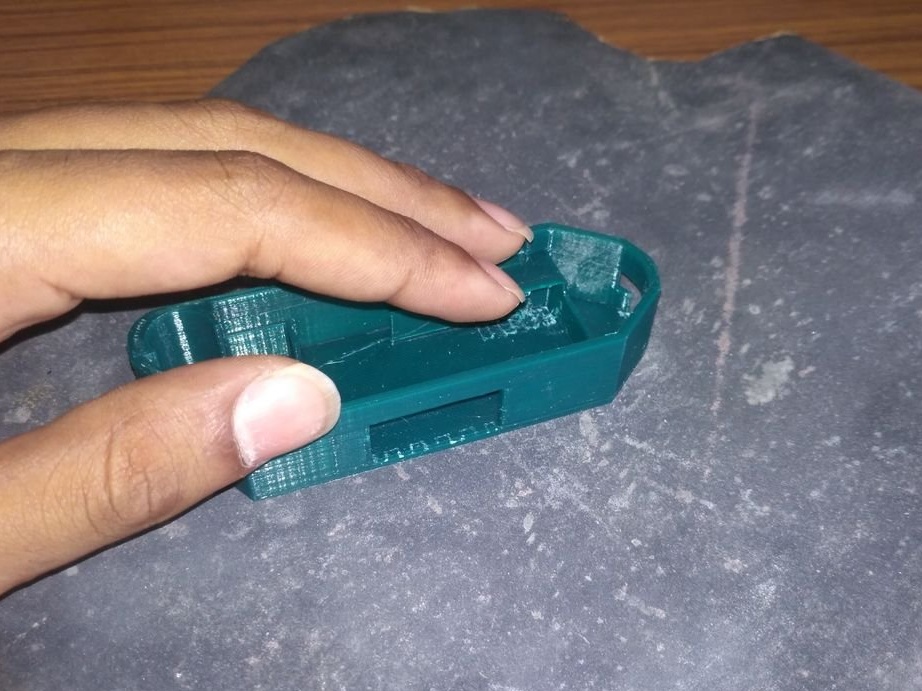
เคสถูกออกแบบมาเพื่อทำให้อุปกรณ์มีขนาดกะทัดรัดที่สุด
มาดูวิดีโอพร้อมตัวอย่างของการทำงานของอุปกรณ์
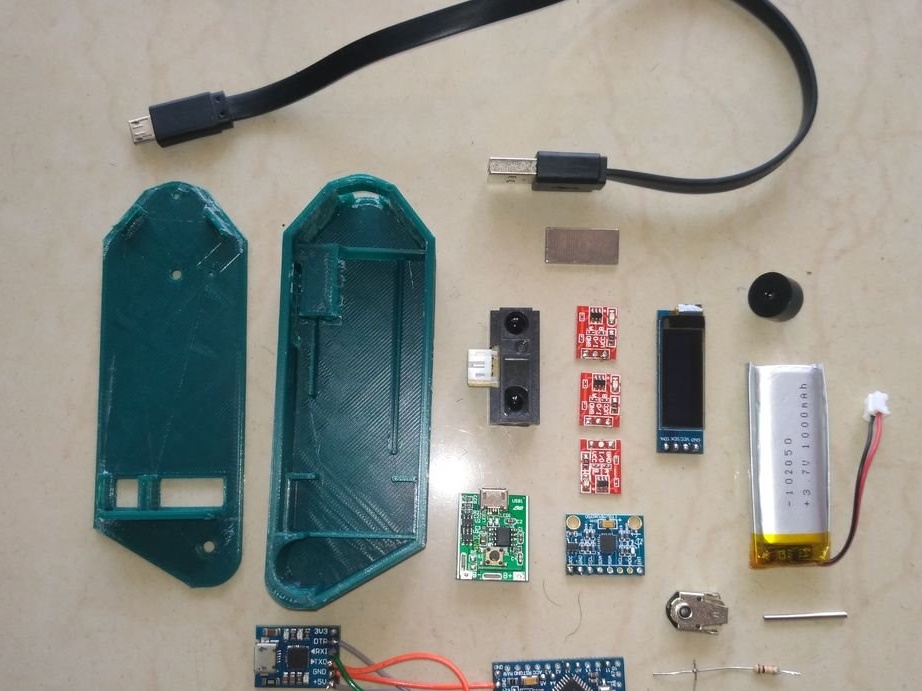
เครื่องมือและวัสดุ:
-IR เซ็นเซอร์ระยะทางชาร์ป GP2Y0A41SK0F;
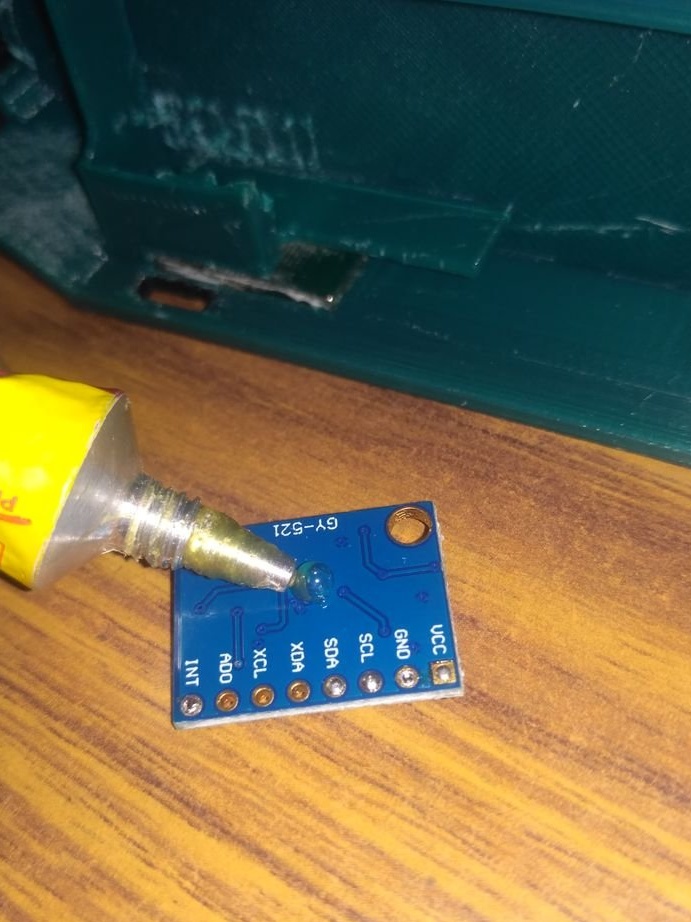
- โมดูล MPU6050 accelerometer / วัดการหมุนวน;
โมดูล -Charge;
-Enkoder;
-128 X 32 จอแสดงผล OLED;
-Arduino pro mini ATMEGA328 5 V / 16 MHz;
กริ่ง -12 มม.
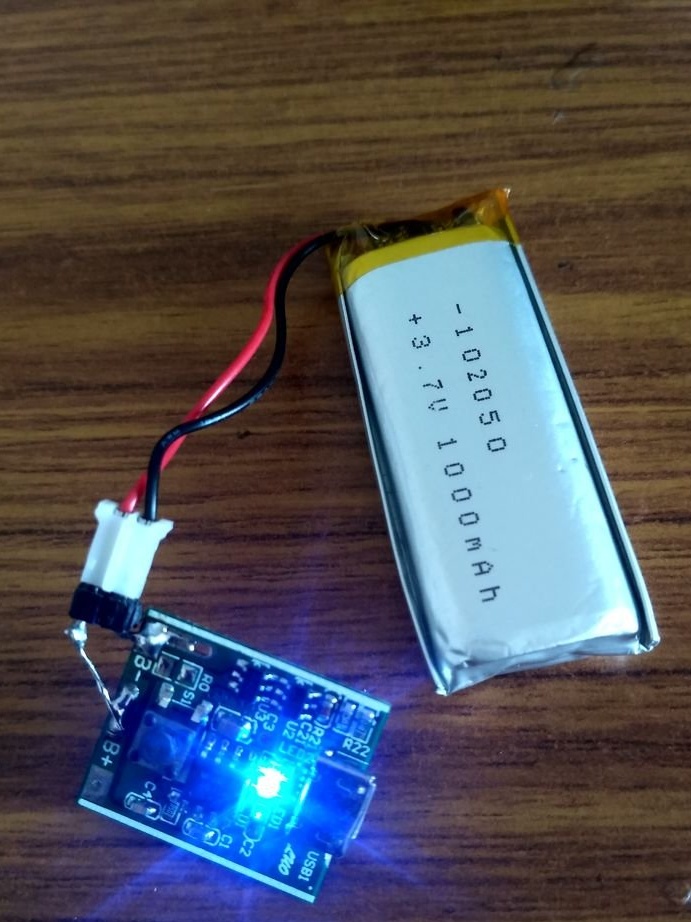
-3.7 V, 1000 mAh แบตเตอรี่ลิเธียมโพลิเมอร์
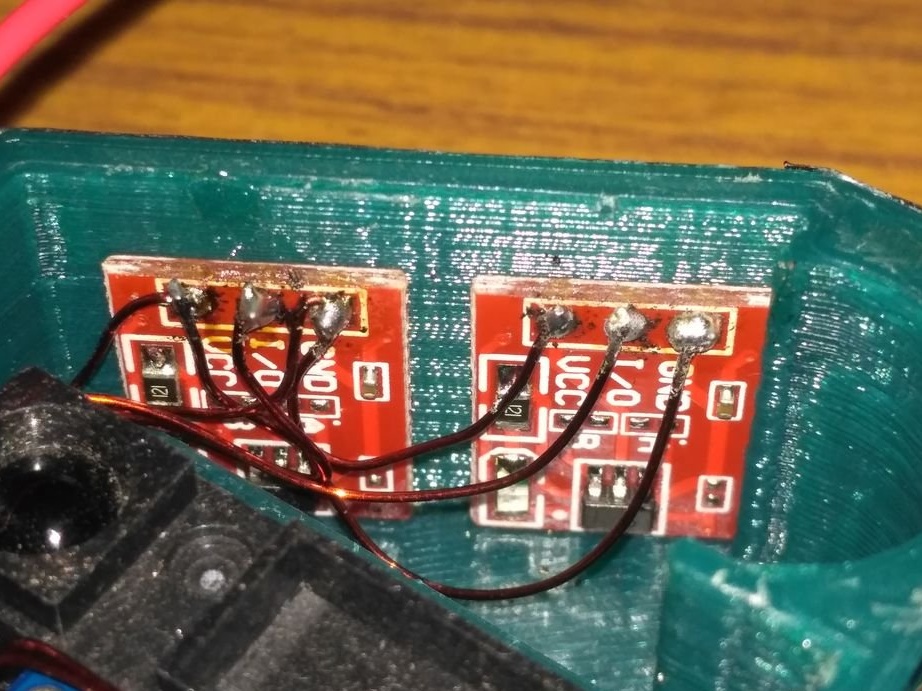
- โมดูลปุ่มสัมผัส TTP223 - 3 ชิ้น;
- แม่เหล็กนีโอดิเมียม 20x10x2 มม.
อินเทอร์เฟซตัวแปลง CP2102
ลวดทองแดงเคลือบ
- ตัวต้านทาน 10K - 2 ชิ้น;
- แท่งเหล็กยาว 19 มม. เส้นผ่าศูนย์กลาง 2 มม.
- LED LED;
- ฟิล์มไวนิล
- สาย Micro USB
- กรรไกร
-Nozh;
- แหนบ
- ปืนสีฟ้า;
-Super กาว;
- อุปกรณ์เสริมสำหรับทิ้ง;
- เครื่องตัดเลเซอร์
- เครื่องพิมพ์ 3 มิติ
-Kusachki;
- ขยะกระดาษ

ขั้นตอนที่หนึ่ง: คดี
ก่อนอื่นตัวช่วยสร้างจะพิมพ์เคสบนเครื่องพิมพ์ 3D สามารถดาวน์โหลดไฟล์สำหรับการพิมพ์ด้านล่าง
BODY.stl
LID.stl
wheel.stl
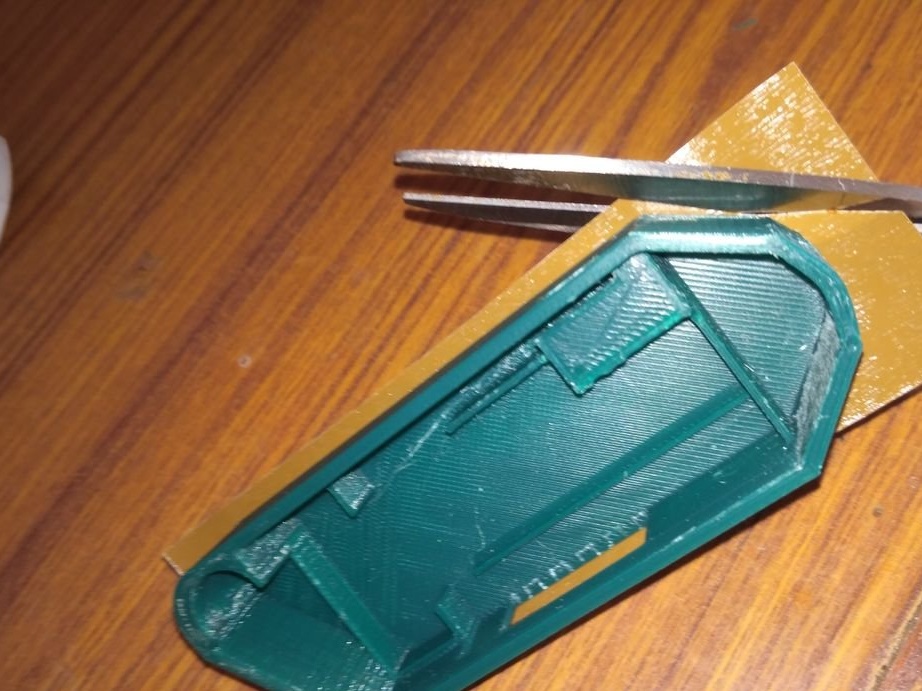
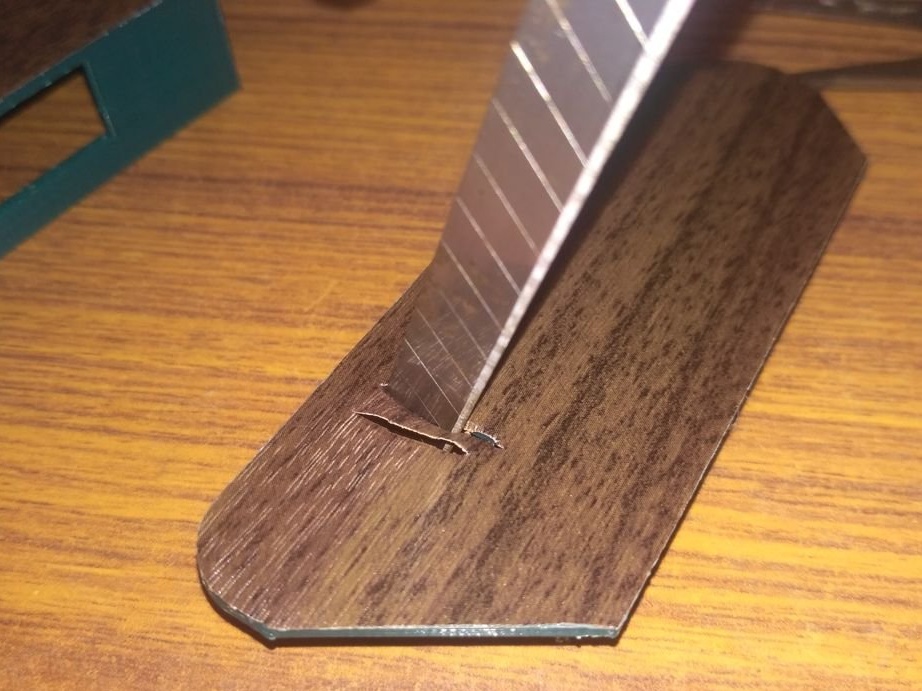
มันติดเคสด้วยฟิล์มไวนิลก่อนหน้านี้ขัดพื้นผิวของมัน







ขั้นตอนที่สอง: โครงการ
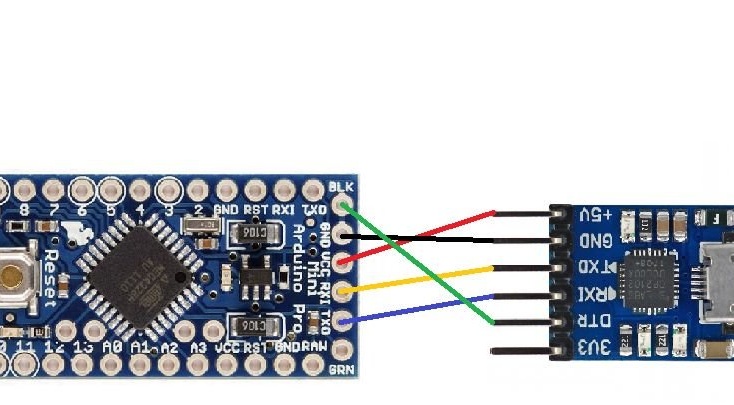
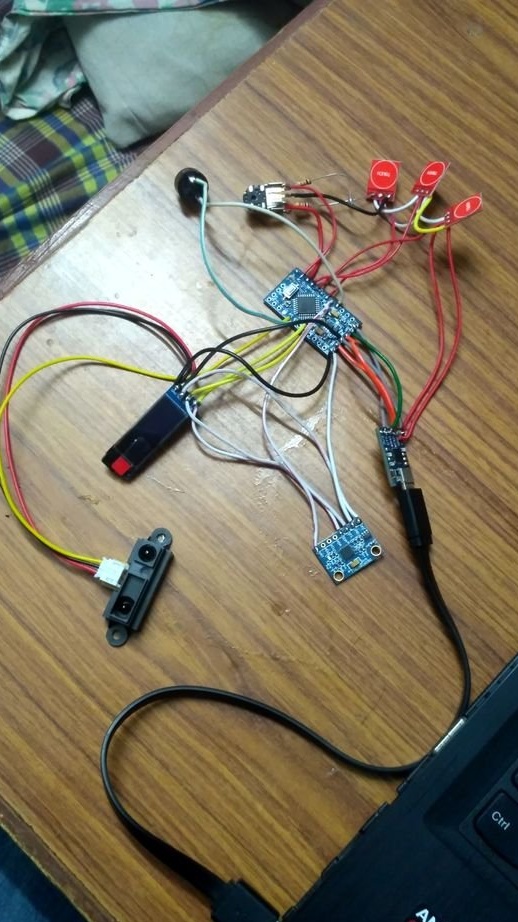
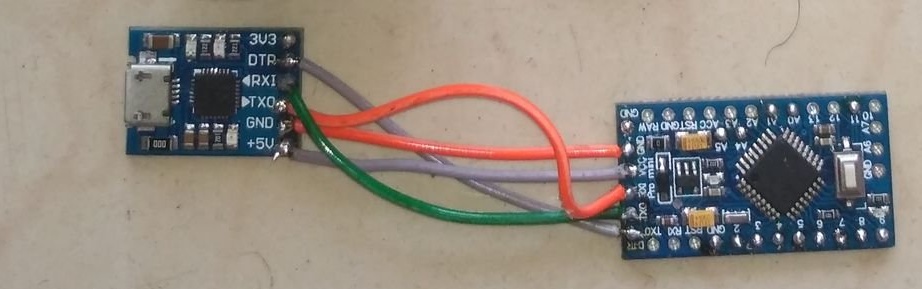
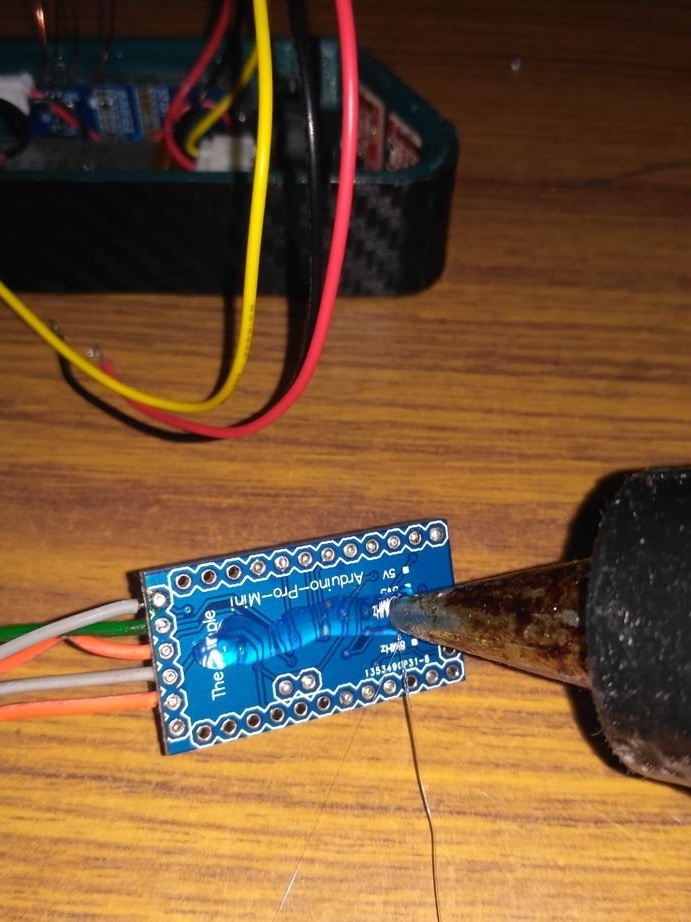
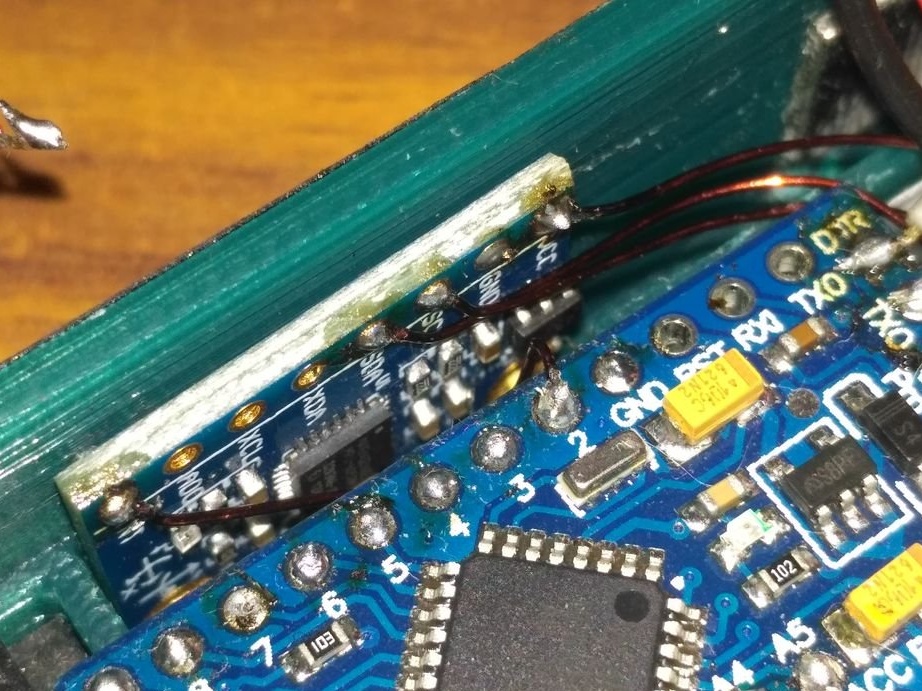
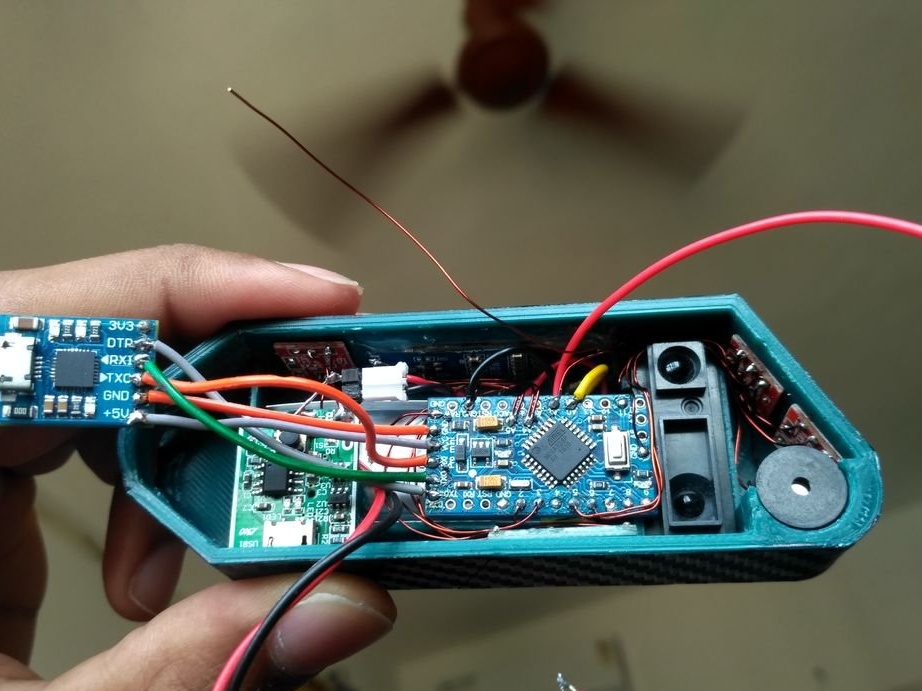
แตกต่าง Arduino nano, pro mini ไม่สามารถตั้งโปรแกรมได้โดยตรงโดยเชื่อมต่อสาย USB ดังนั้นคุณต้องเชื่อมต่อ USB ภายนอกเข้ากับตัวแปลงโปรขนาดเล็กเพื่อตั้งโปรแกรม ภาพถ่ายแรกแสดงให้เห็นว่าควรทำการเชื่อมต่อเหล่านี้อย่างไร
Vcc - 5V
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
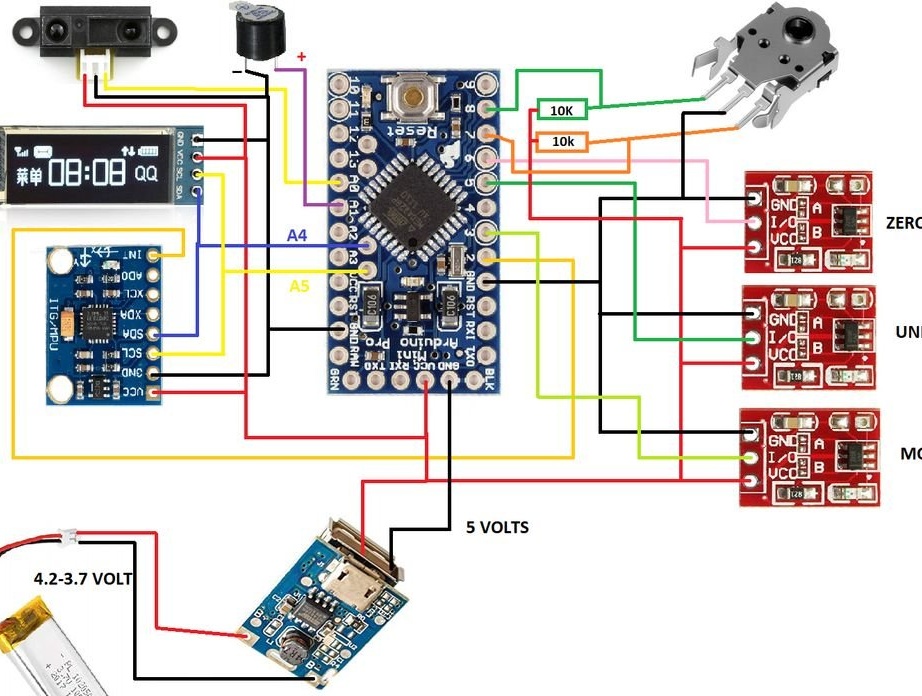
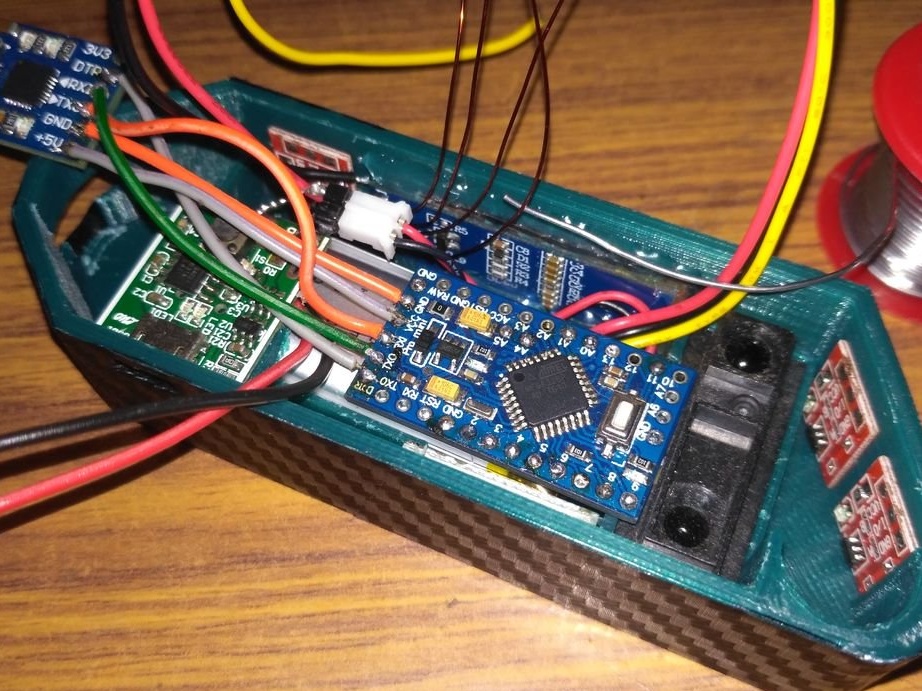
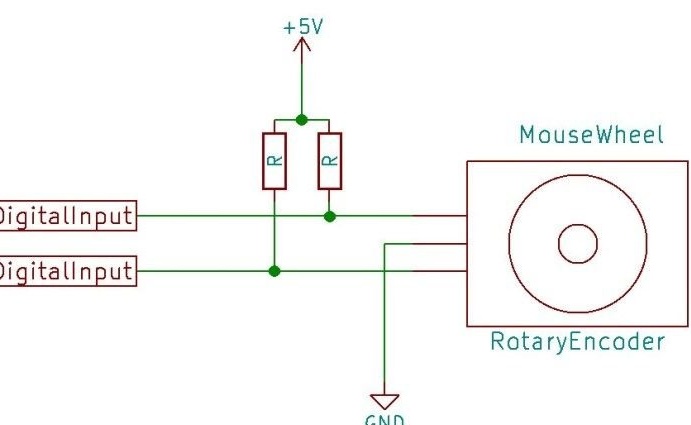
ภาพที่ 2 แสดงแผนภาพวงจรที่สมบูรณ์ของโครงการนี้
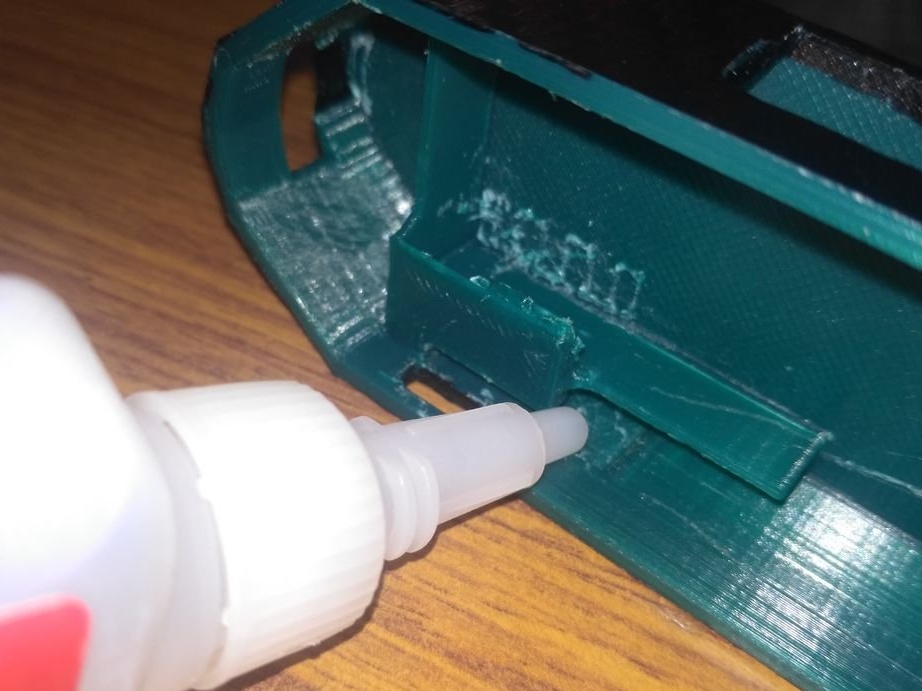
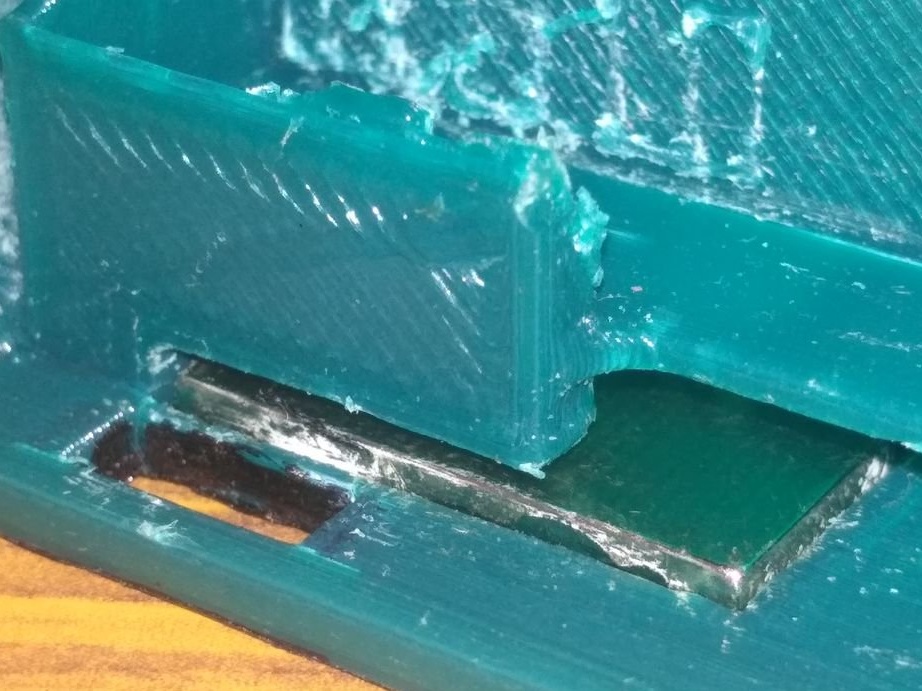
ขั้นตอนที่สาม: แม่เหล็ก
กาวแม่เหล็กให้กับร่างกาย

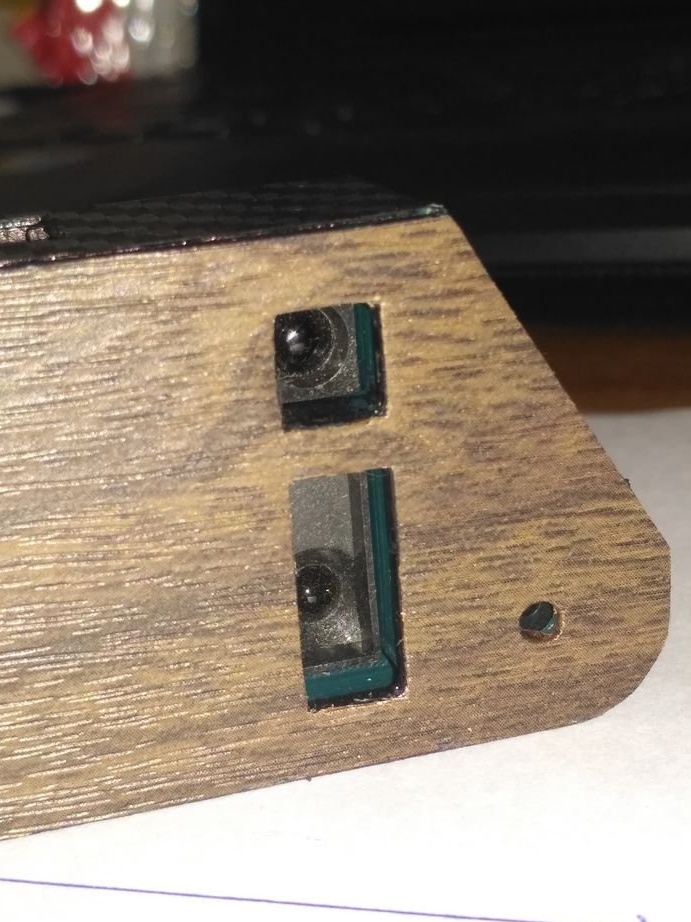
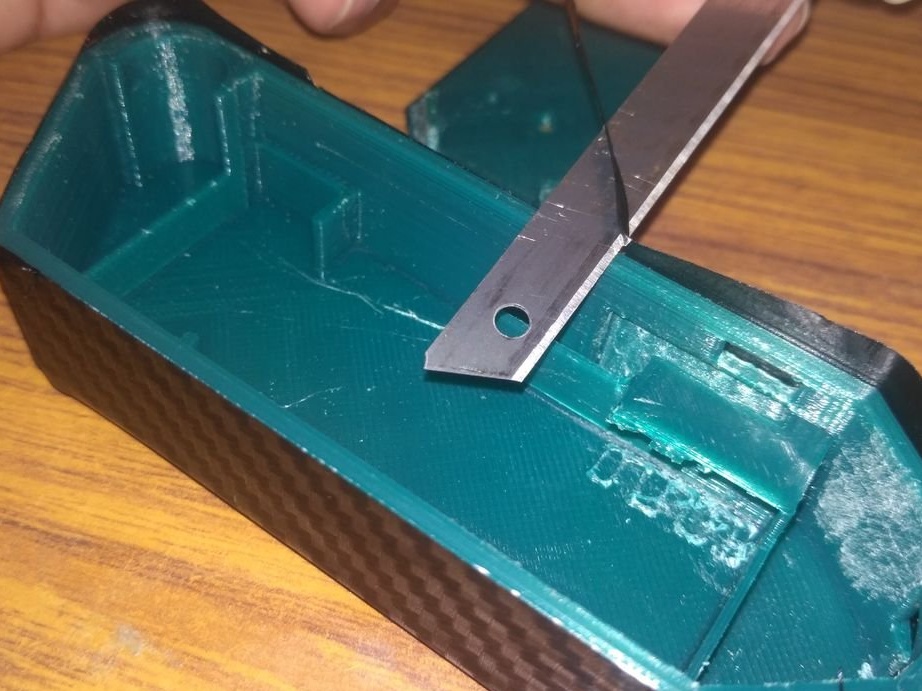
ขั้นตอนที่สี่: การจัดตำแหน่งเซ็นเซอร์
เพื่อลดขนาดเซ็นเซอร์ IR และตัวเข้ารหัสจะถูกตัดออก






ขั้นตอนที่ห้า: แสดงผล
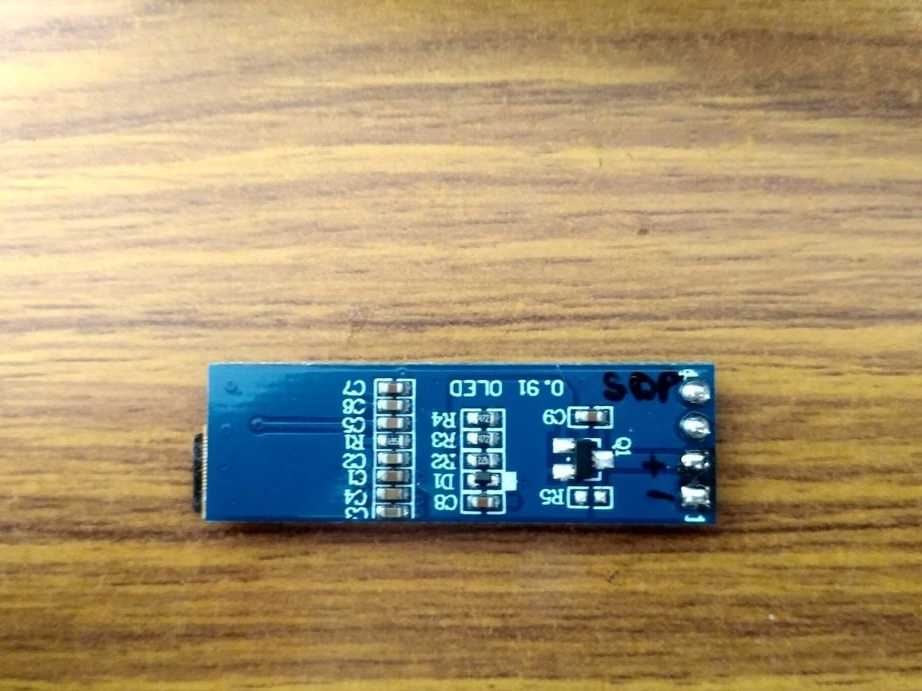
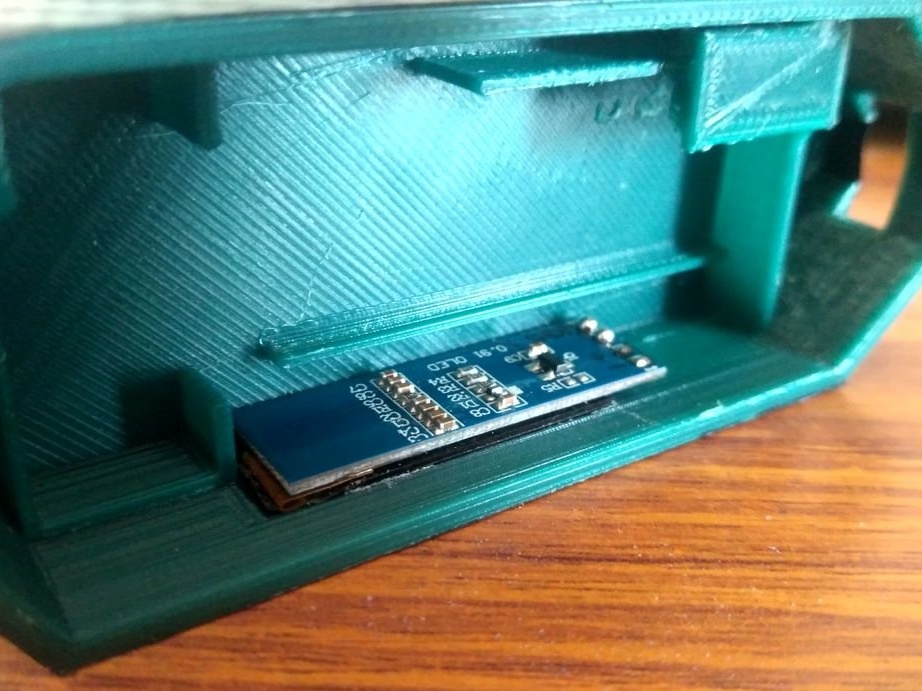
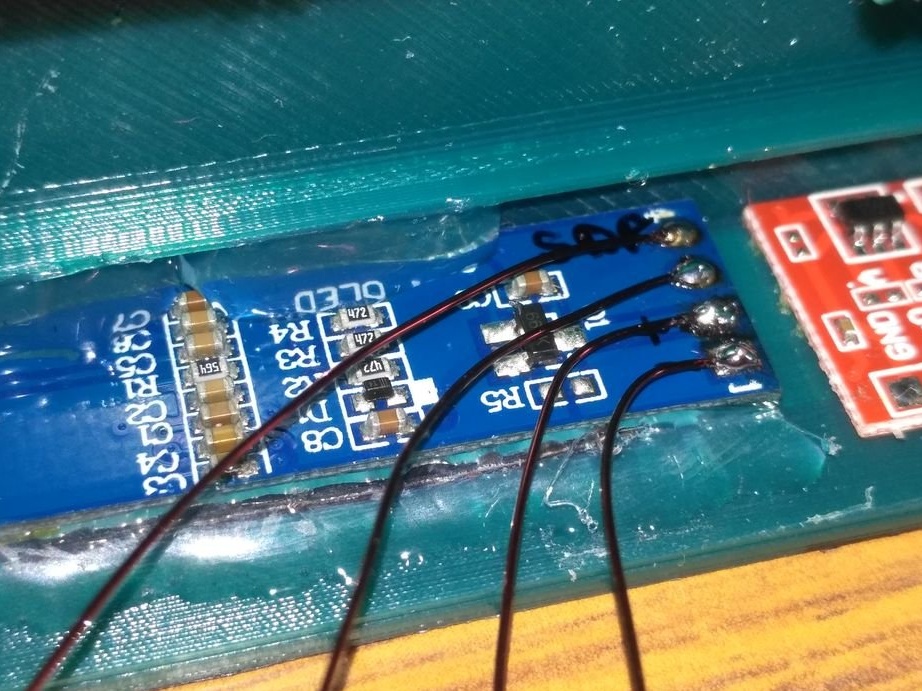
ทำเครื่องหมายชื่อของผู้ติดต่อที่ด้านหลังของจอแสดงผล OLED เพื่อให้คุณสามารถทำการเชื่อมต่อที่ถูกต้องในภายหลัง ตั้งค่าจอแสดงผล OLED เป็นตำแหน่งที่ถูกต้องตามที่แสดงในรูปที่สอง แก้ไขจอแสดงผลด้วยกาวร้อน

ขั้นตอนที่หก: โมดูล
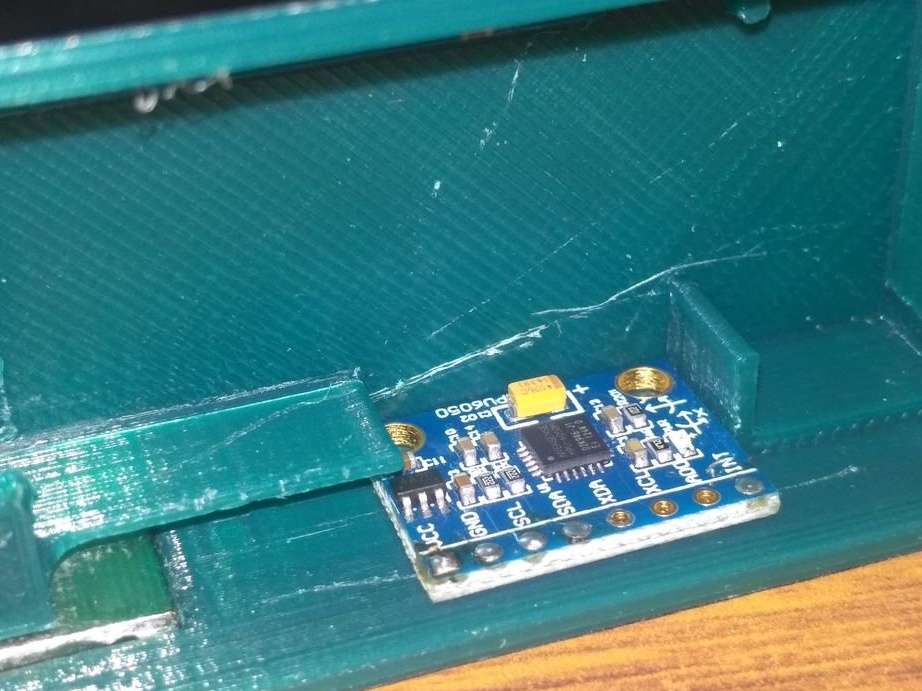
ติดตั้งโมดูลเซ็นเซอร์และ MPU6050


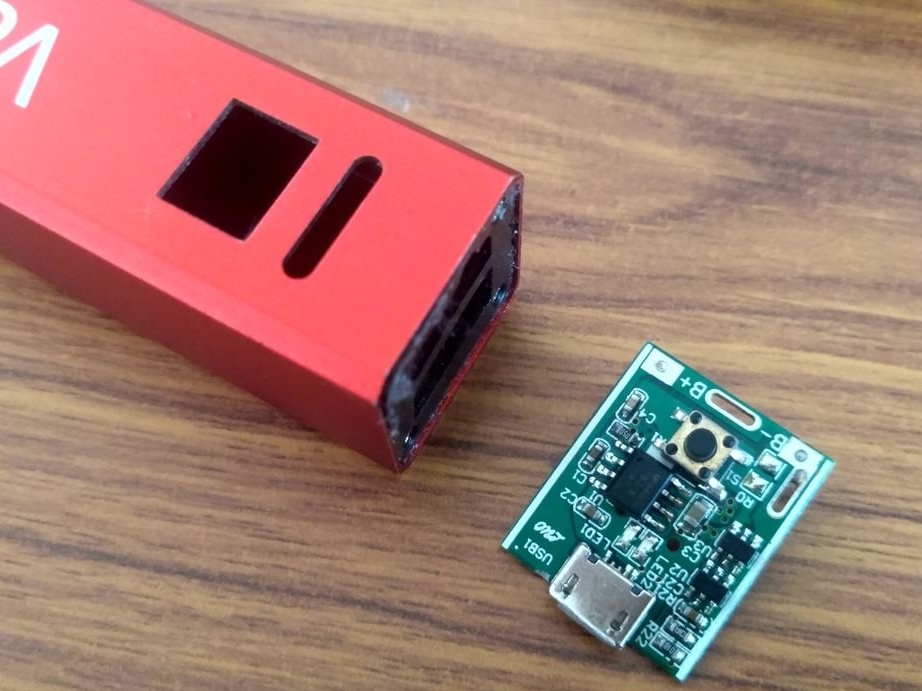
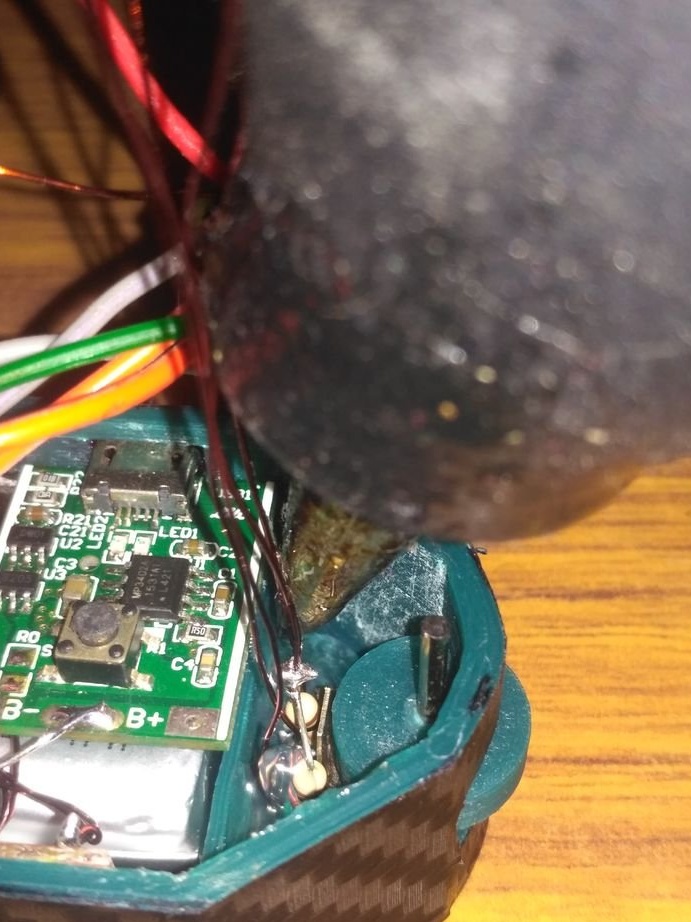
ขั้นตอนที่เจ็ด: การชาร์จโมดูลและแบตเตอรี่
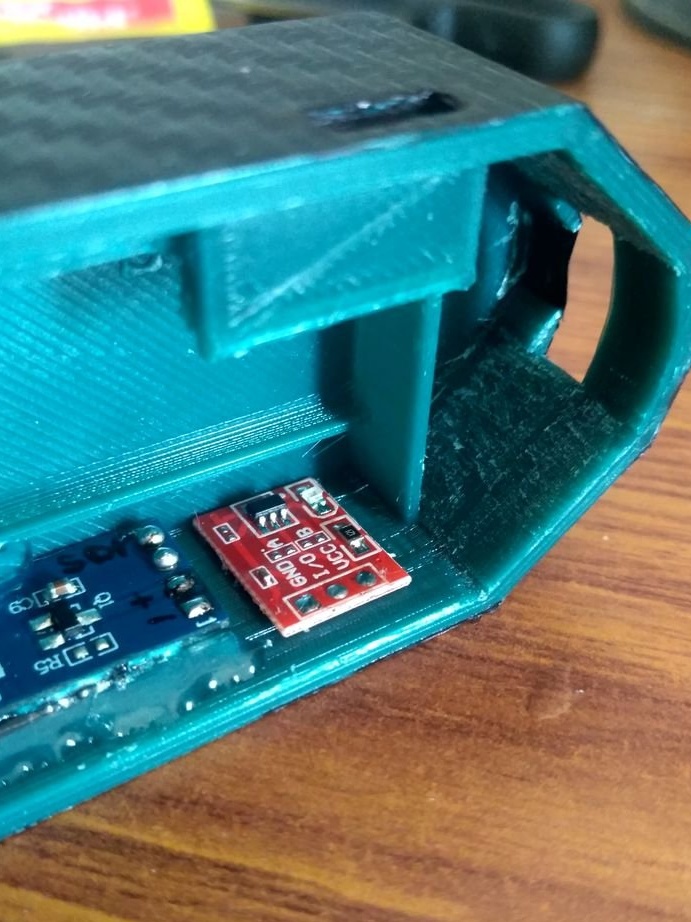
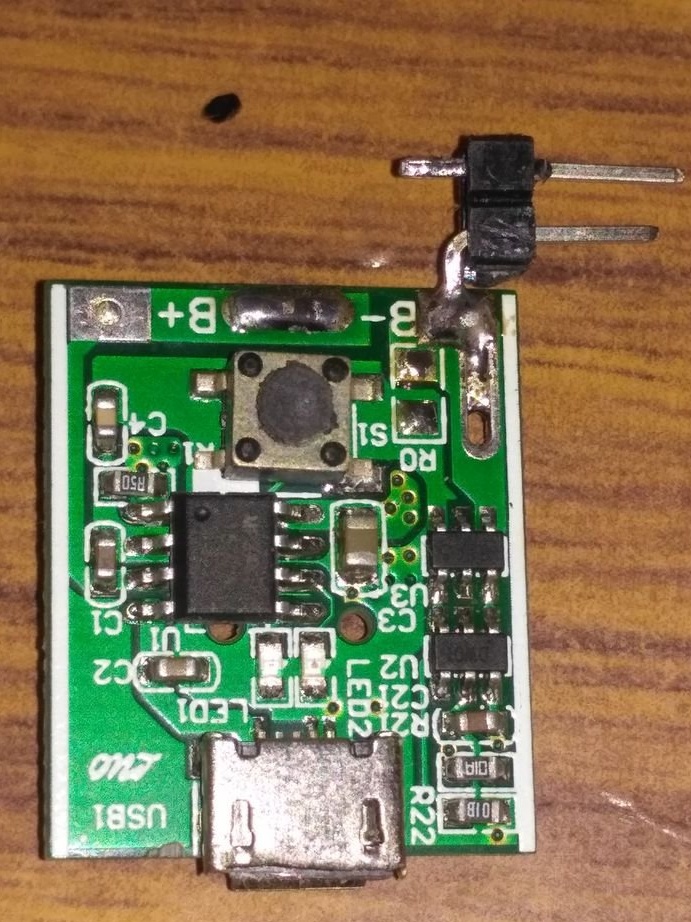
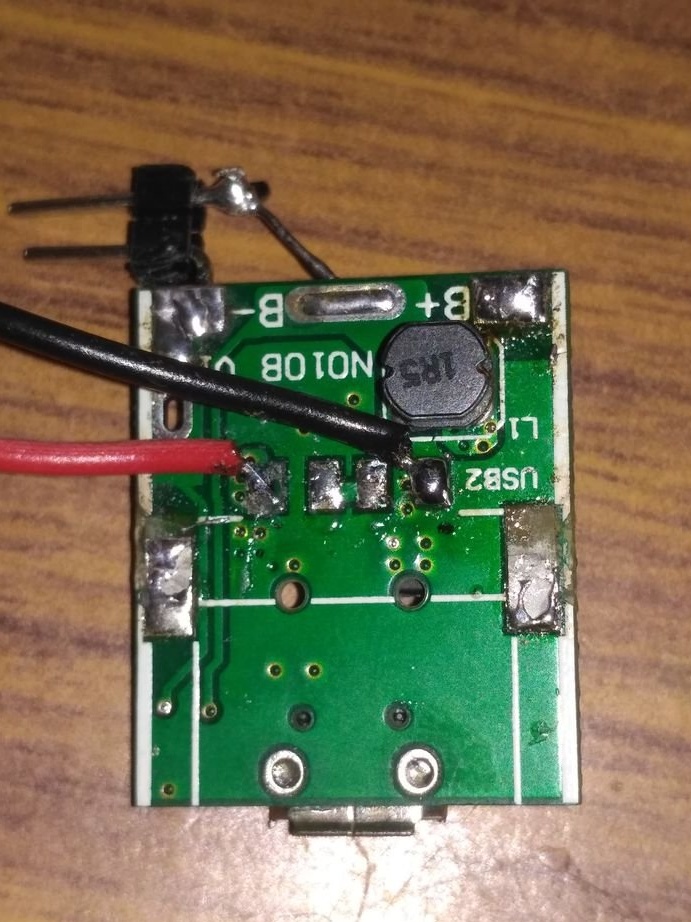
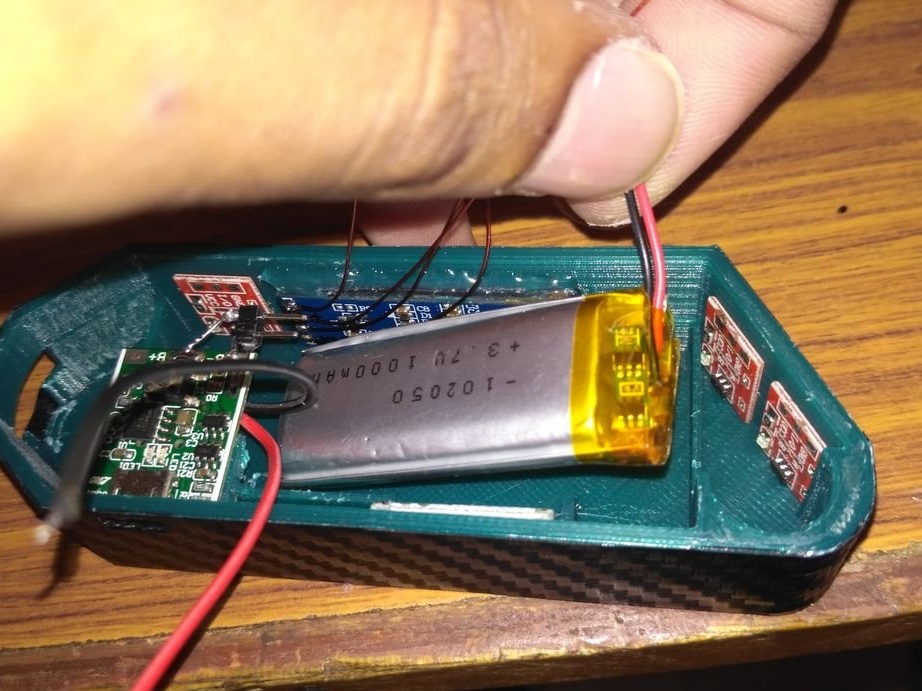
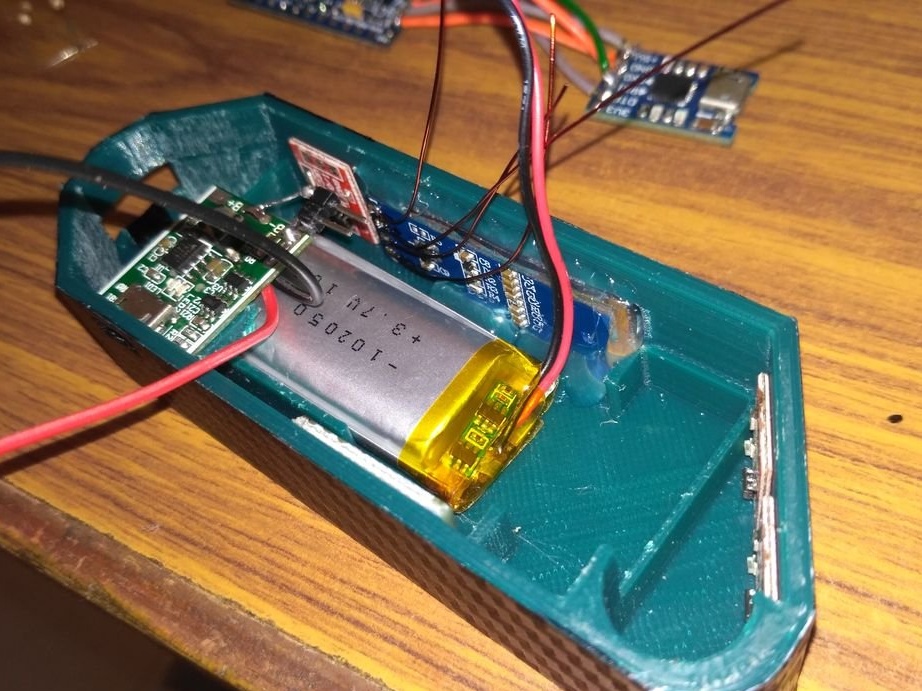
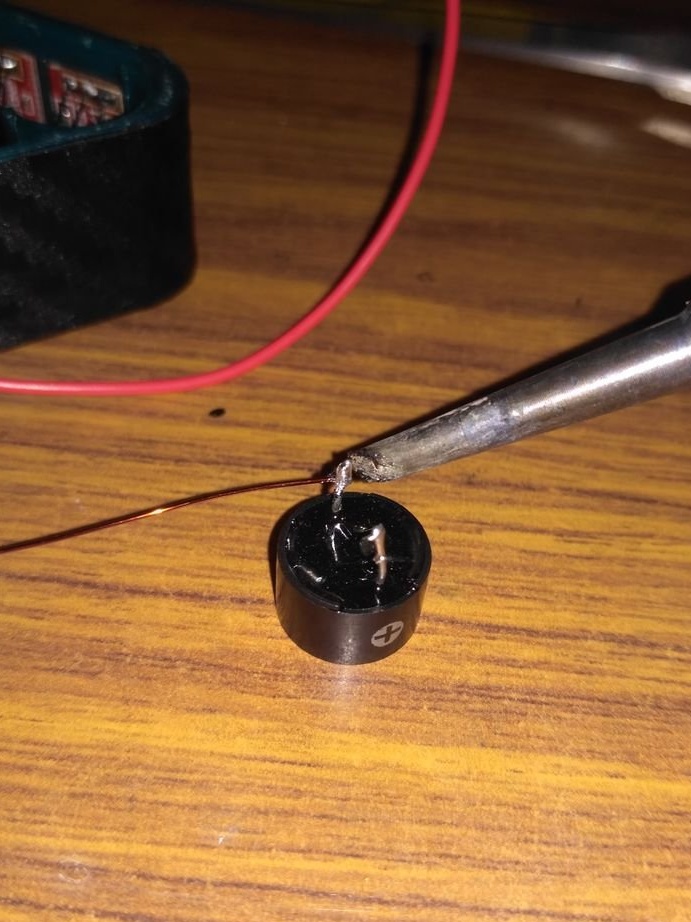
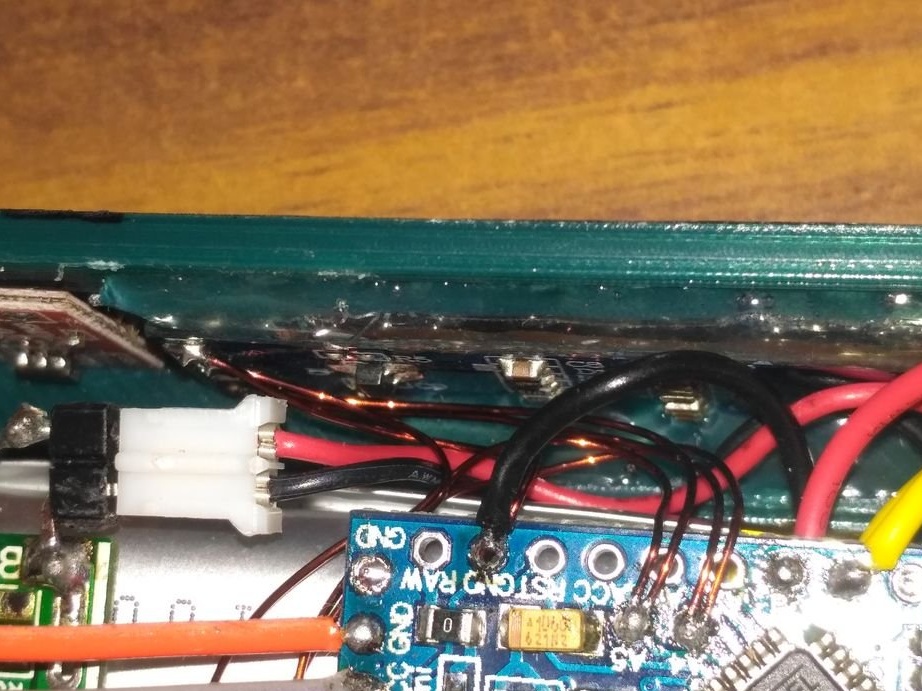
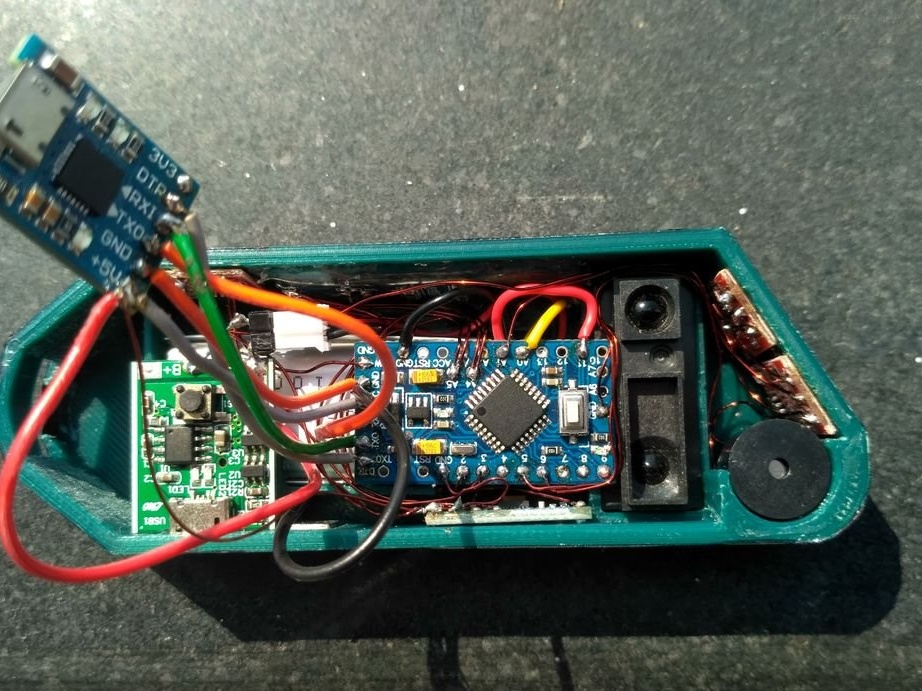
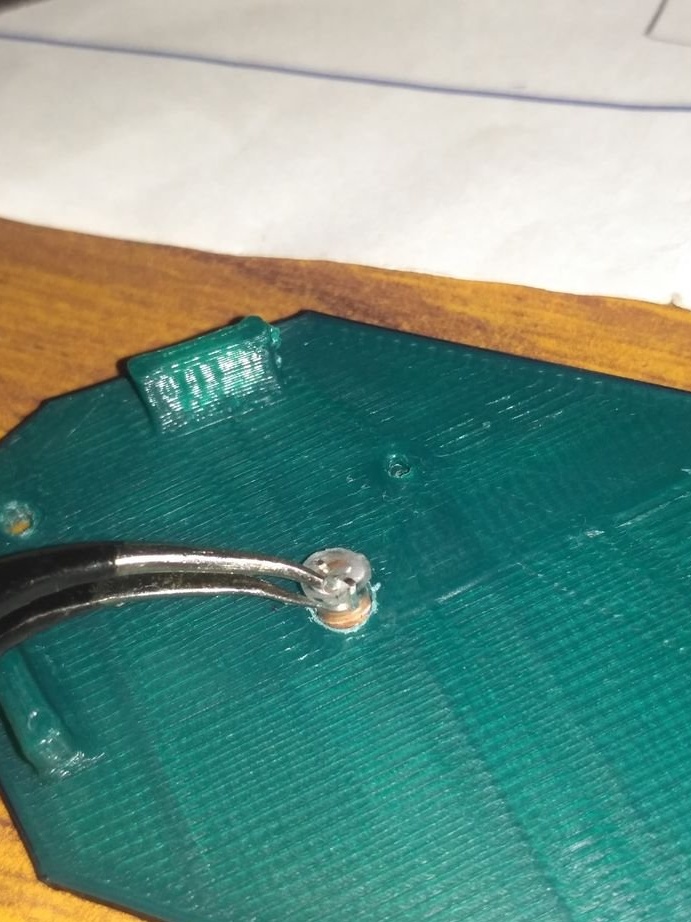
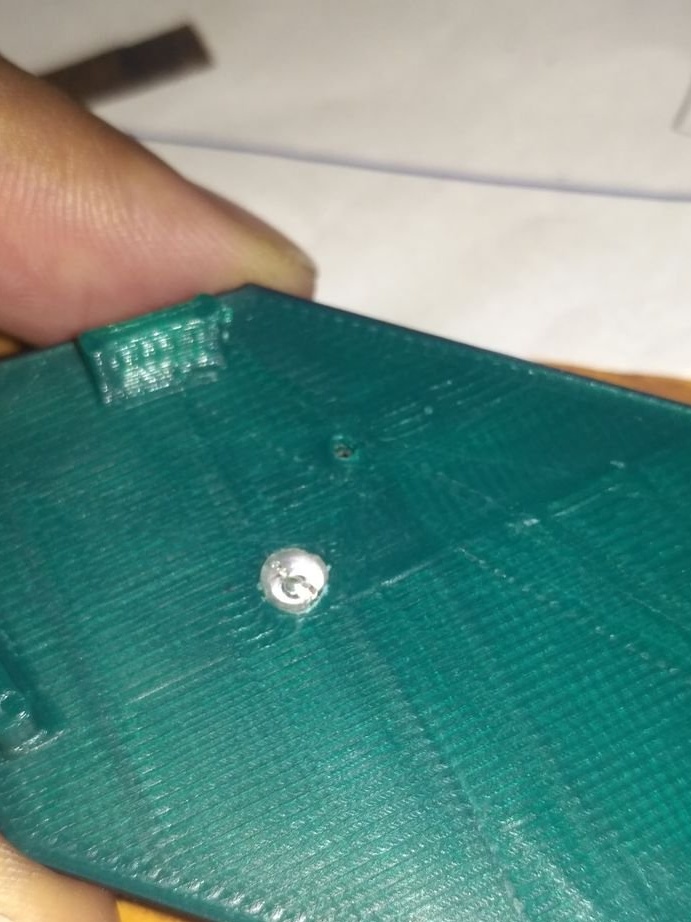
โมดูลนี้มีทั้งวงจรป้องกันแบตเตอรี่และตัวแปลงเพิ่ม 5 V, 1 A นอกจากนี้ยังมีปุ่มเปิด / ปิดที่สามารถใช้เป็นสวิตช์ไฟ พอร์ตซ็อกเก็ต USB บนโมดูลถูกถอดออกโดยใช้หัวแร้งและสายไฟสองเส้นถูกบัดกรีที่ขั้ว +5 V และกราวด์ตามที่แสดงในรูปที่ 4
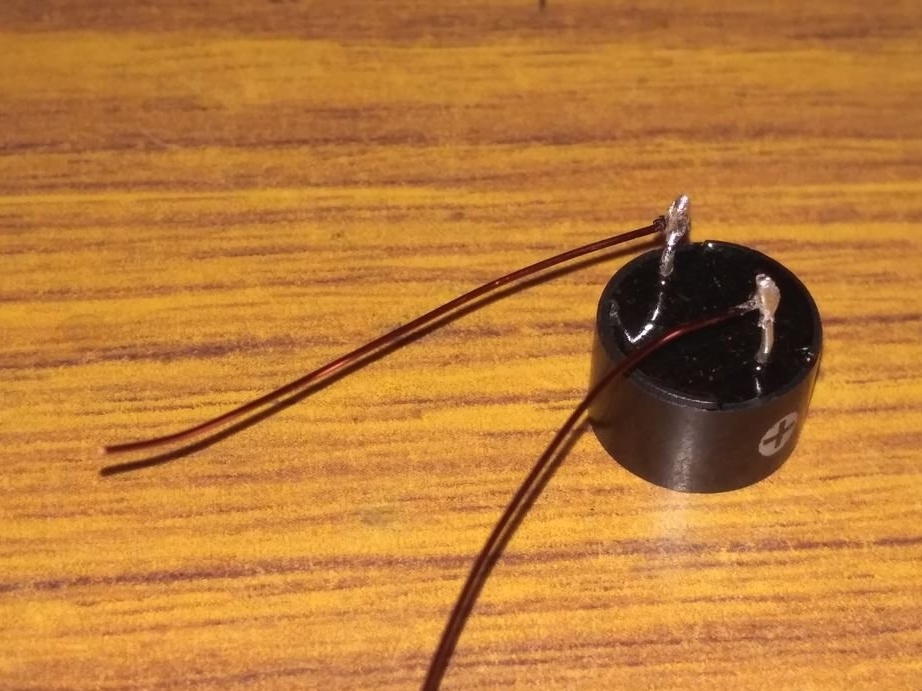
ถัดไปคุณจะต้องบัดกรีขั้วต่อปลั๊ก 2 ตัวไปที่ B + และ B- ดังที่แสดงในภาพถ่ายสองรูปแรกจากนั้นตรวจสอบว่าโมดูลใช้งานได้กับแบตเตอรี่หรือไม่
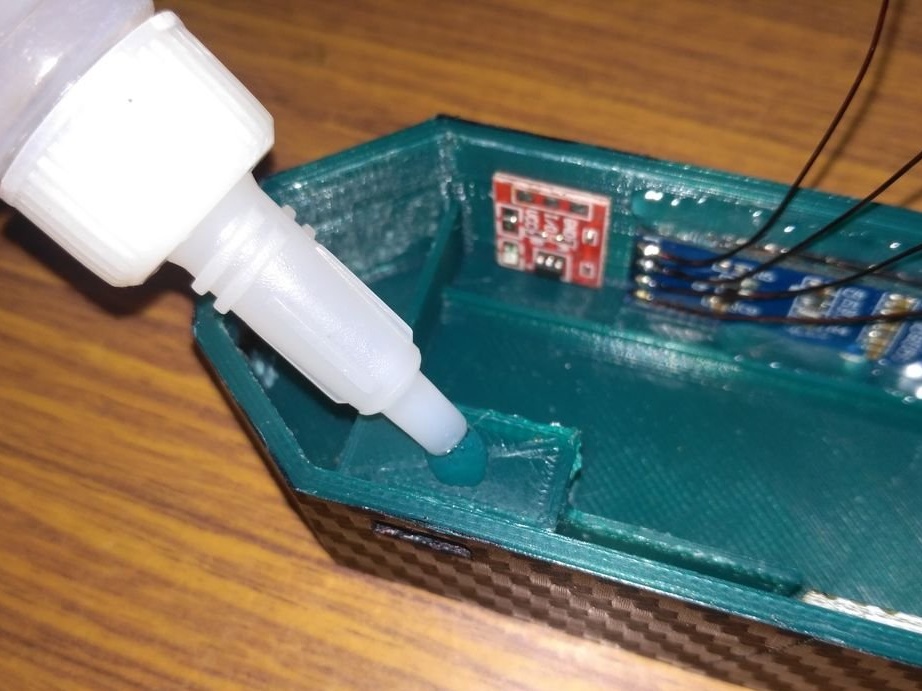
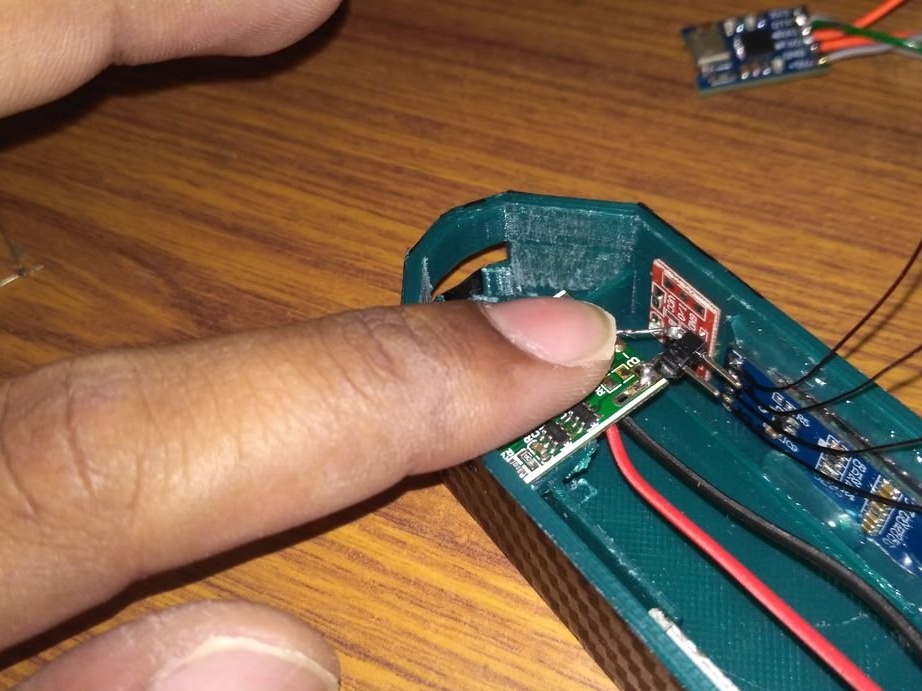
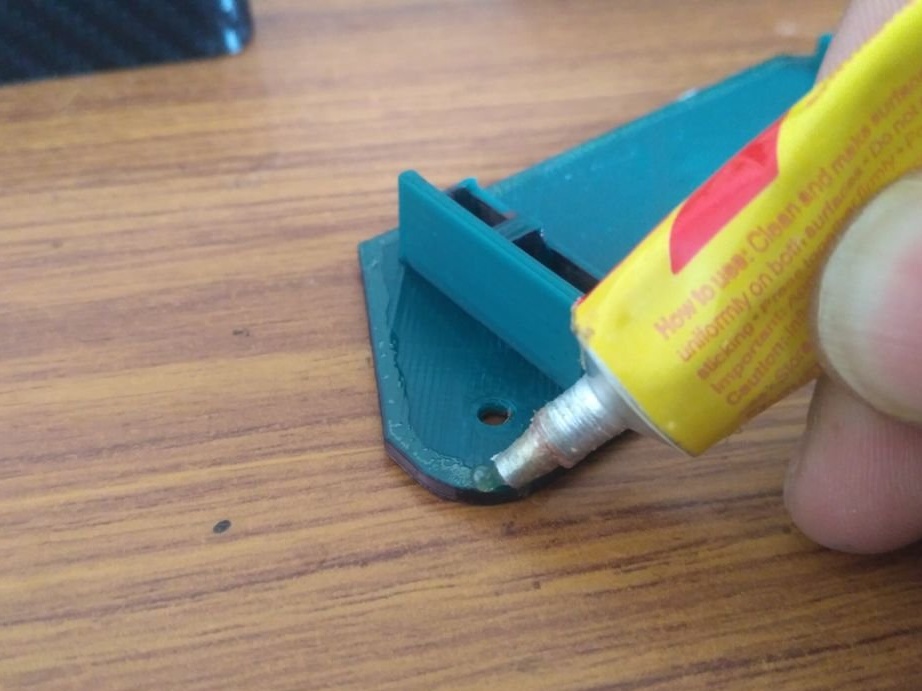
ตอนนี้คุณต้องใช้กาวกับแพลตฟอร์มที่มีให้สำหรับโมดูลและวางโมดูลอย่างระมัดระวังตรวจสอบให้แน่ใจว่าได้ติดตั้งพอร์ตการชาร์จและรูเข้าในรูอย่างแม่นยำ

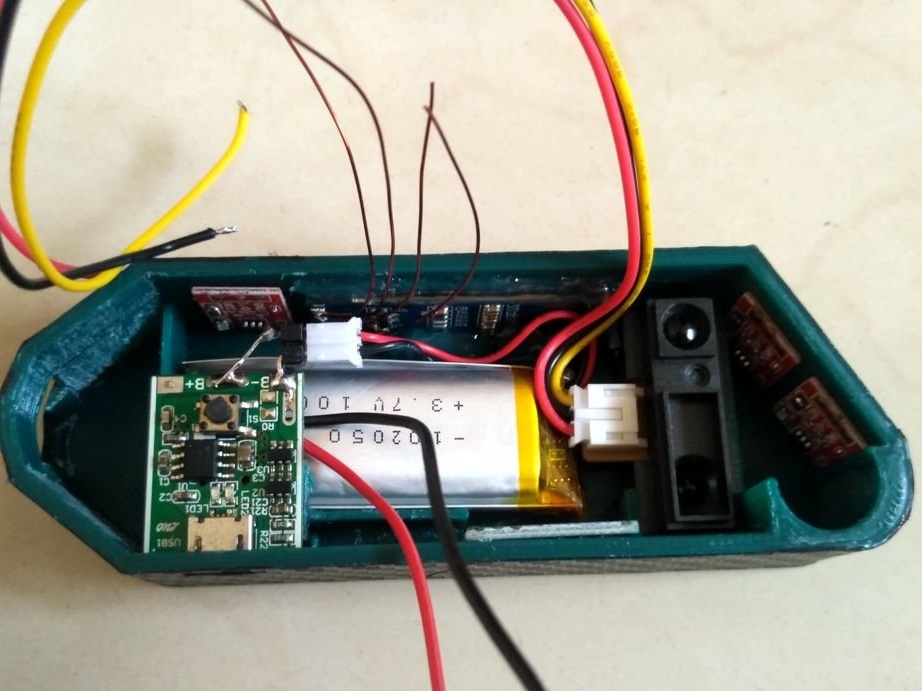
ขั้นตอนที่แปด: การติดตั้งแบตเตอรี่และเซ็นเซอร์ IR
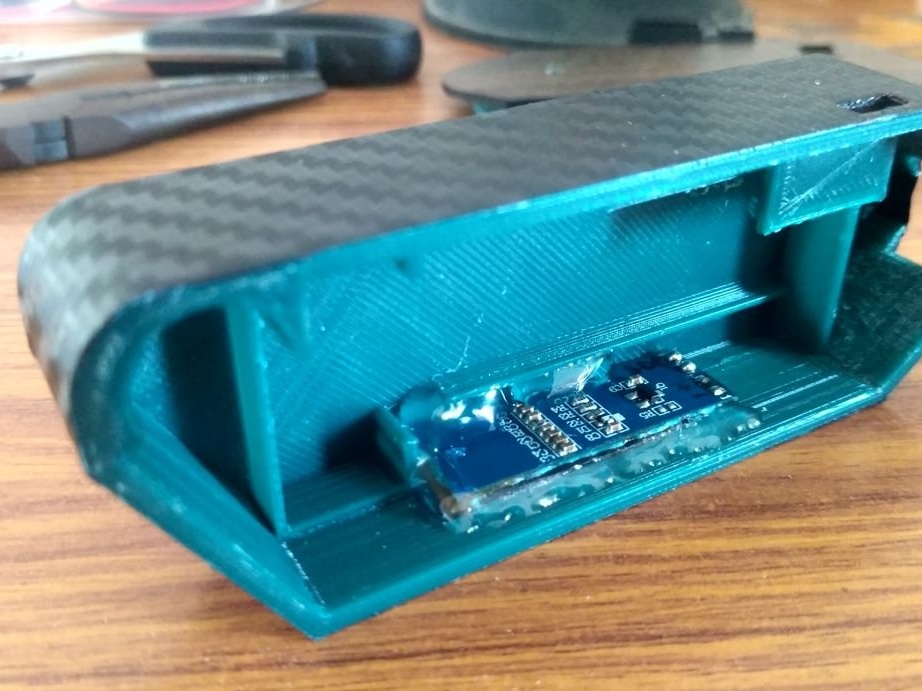
บัดกรีสายไฟเข้ากับหมุดแสดงผล ติดตั้งแบตเตอรี่และเซ็นเซอร์ IR

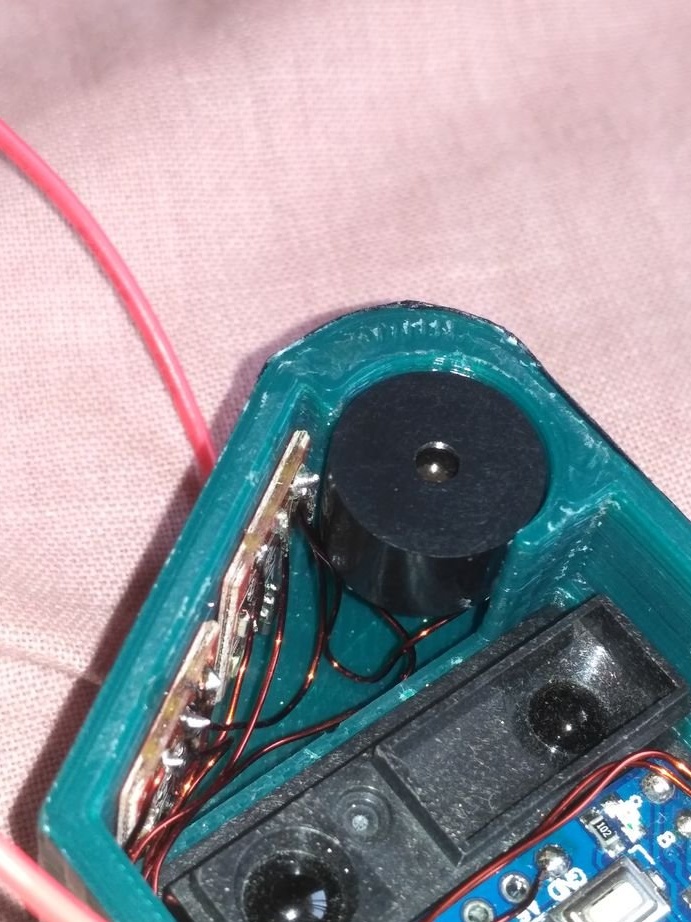
ขั้นตอนที่เก้า: Buzzer และโมดูลการชาร์จ
ตามรูปแบบมันจะติดตั้งโมดูลการชาร์จและออด

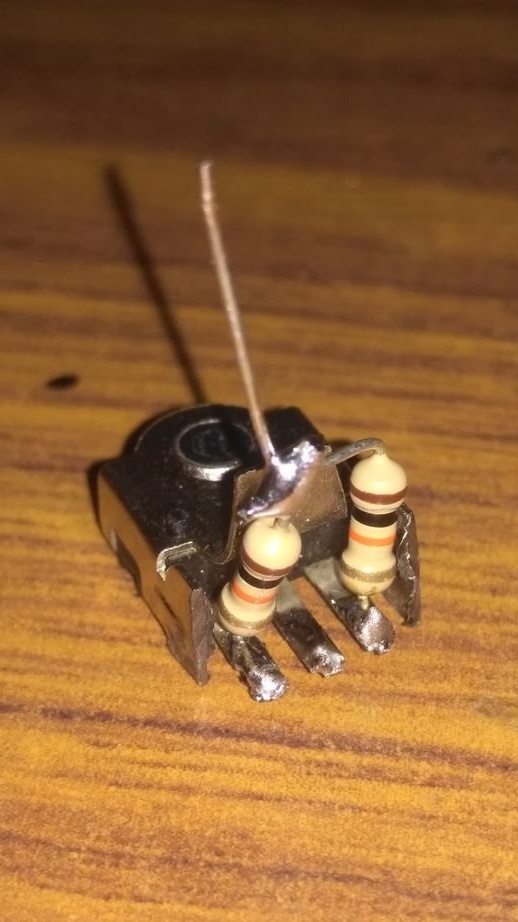
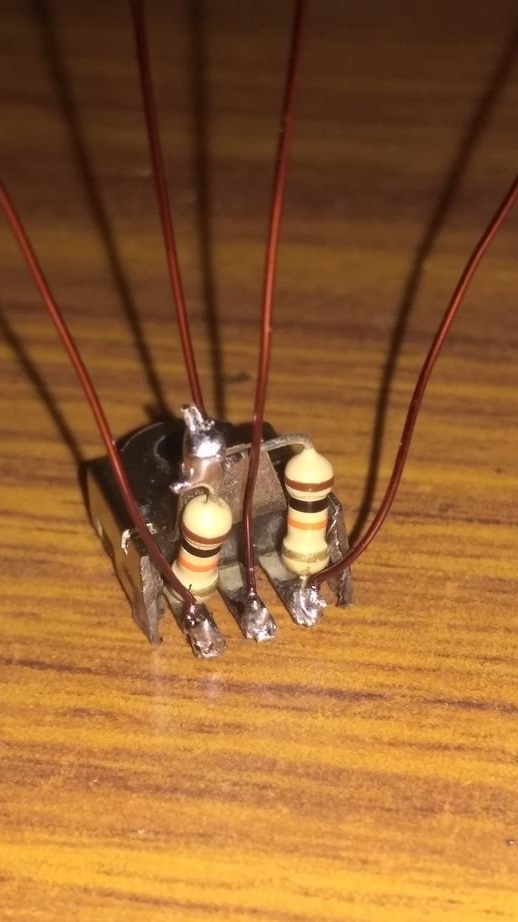
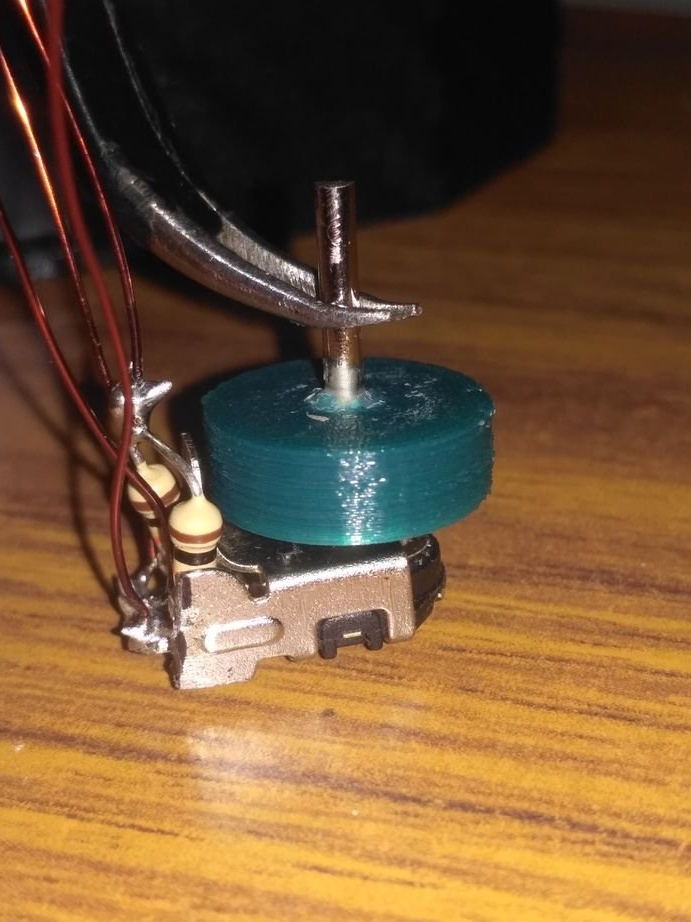
ขั้นตอนที่สิบ: ตัวเข้ารหัส
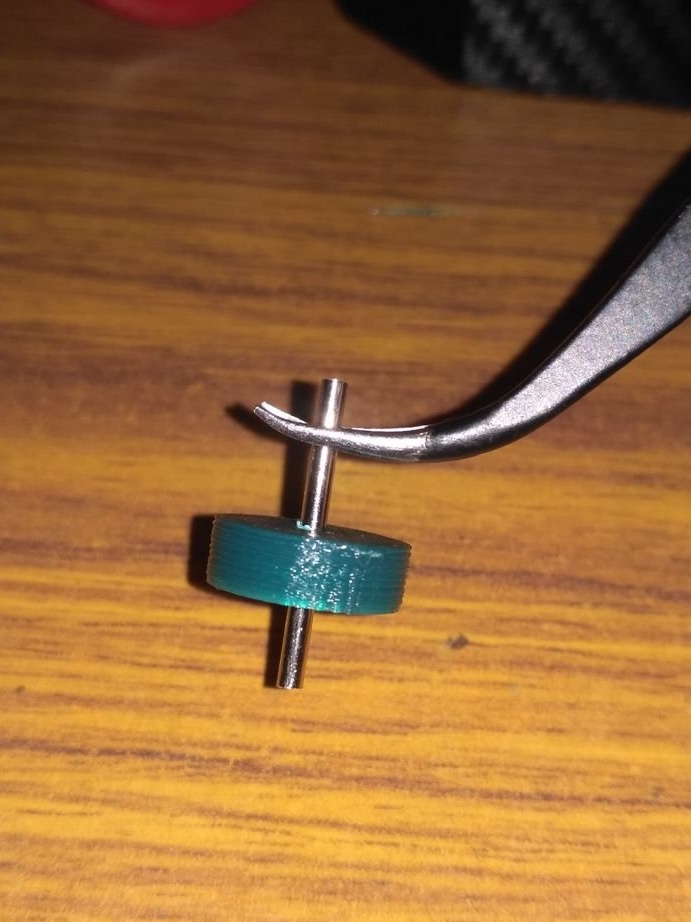
ตามรูปแบบการติดตั้งตัวเข้ารหัส แทรกแกนเหล็กลงในเครื่องเข้ารหัสและล้อ ใช้กาวซุปเปอร์ในการซ่อมเพลาและล้อ ติดตั้งตัวเข้ารหัสพร้อมล้อที่อยู่ภายในตัวเรือน




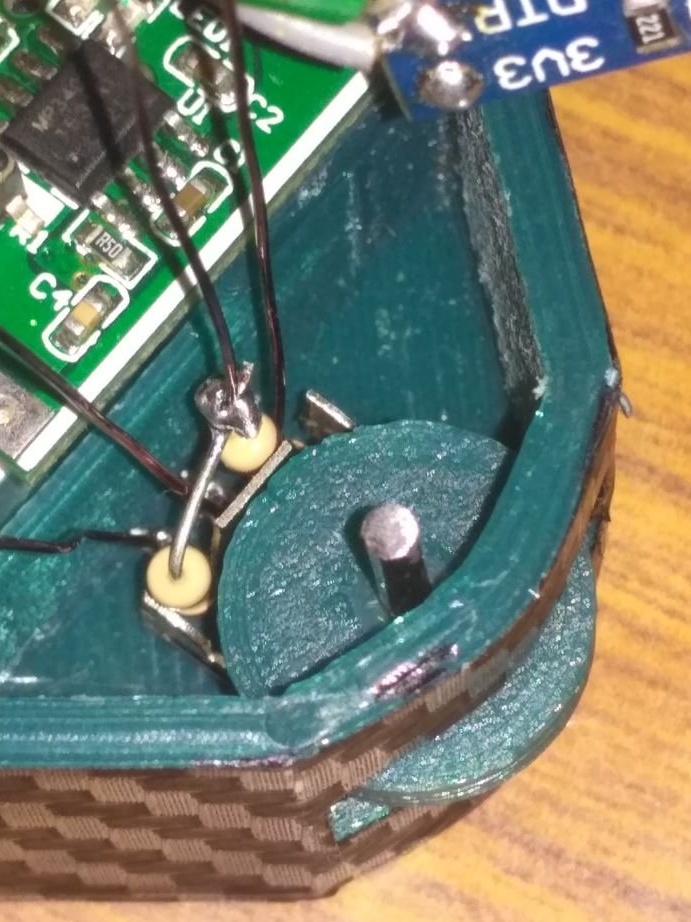
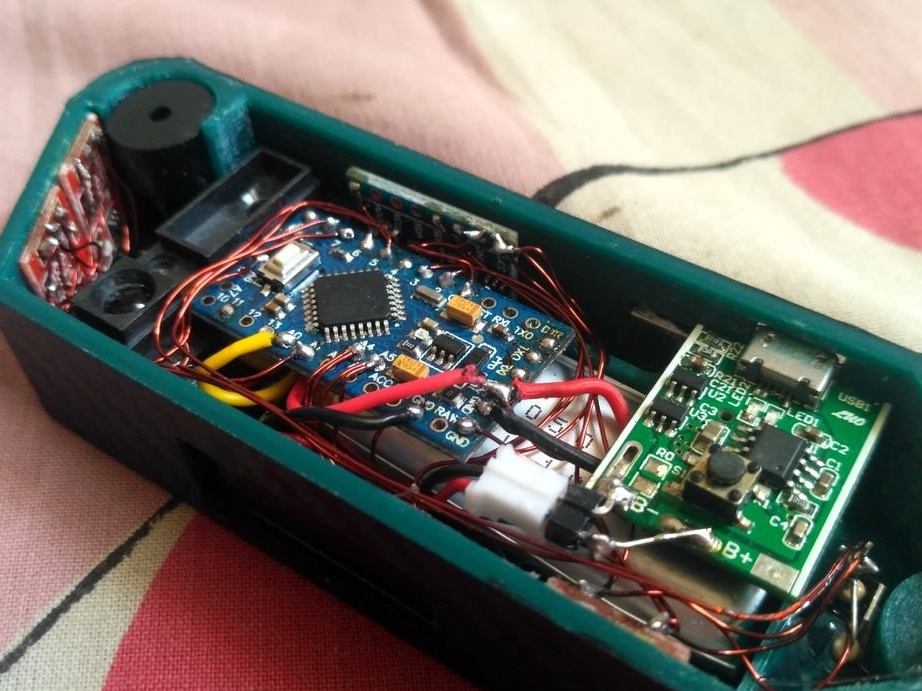
ขั้นตอนที่สิบเอ็ด: การติดตั้ง
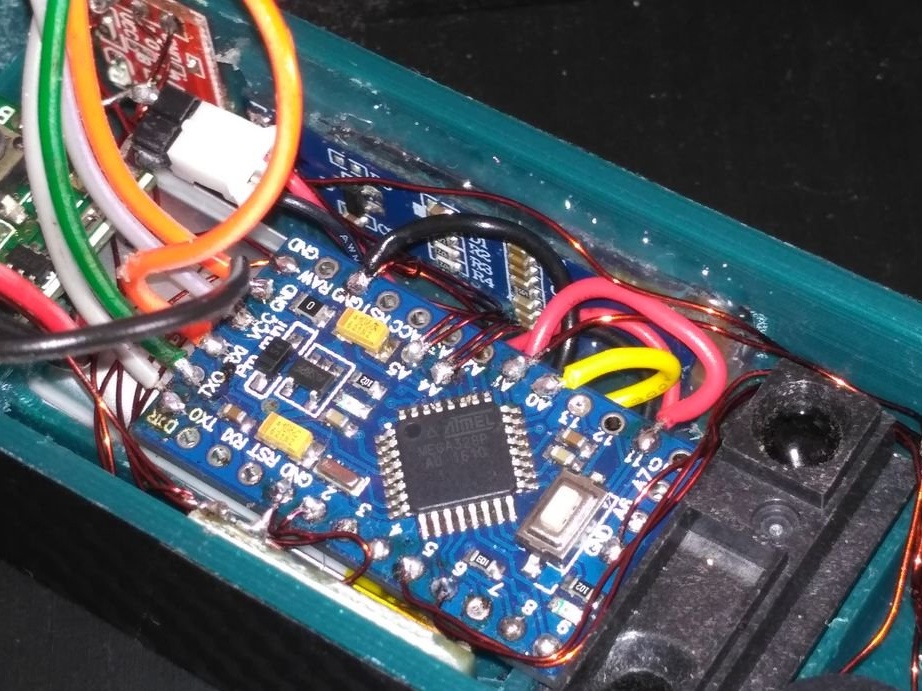
แก้ไขโมดูลเซ็นเซอร์ ตามวงจรจะติดตั้งสายไฟ ระหว่างการติดตั้งจำเป็นต้องตรวจสอบให้แน่ใจว่าสายไฟไม่ตกอยู่ใต้วงล้อและไม่ครอบคลุมเซ็นเซอร์ IR


ขั้นตอนที่สิบสอง: รหัสดาวน์โหลด
โหลดรหัสและไลบรารี
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

ขั้นตอนที่สิบสาม: การสอบเทียบ
อย่างแรกคือการวัดการหมุนวน เนื่องจากโมดูล accelerometer / วัดการหมุนวนของ MPU6050 นั้นติดอยู่กับร่างกายจึงอาจไม่แบนอย่างสมบูรณ์ ดังนั้นเพื่อแก้ไขข้อผิดพลาดนี้จะทำตามขั้นตอนต่อไปนี้
1. เชื่อมต่ออุปกรณ์เข้ากับคอมพิวเตอร์และวางไว้บนพื้นผิวที่เรียบ
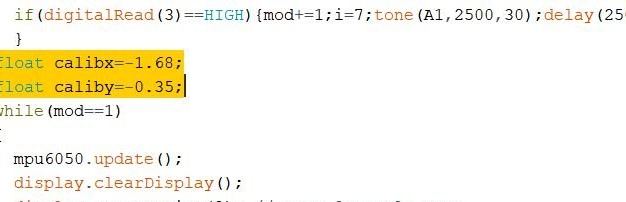
2. สลับไปที่โหมด LEVEL บนอุปกรณ์โดยแตะปุ่ม“ M” แล้วจดค่า X และ Y
3: กำหนดค่าเหล่านี้ให้กับตัวแปร“ calibx” และ“ caliby” ในรหัส
4: ดาวน์โหลดโปรแกรมอีกครั้ง



ตอนนี้คำนวณระยะทางต่อการหมุนของล้อ
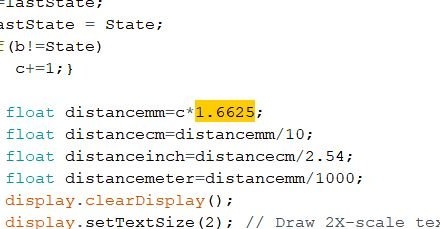
จำนวนขั้นตอนต่อการปฏิวัติของเพลาตัวเข้ารหัส N = 24 ขั้นตอน
เส้นผ่าศูนย์กลางล้อ D = 12.7 มม
เส้นรอบวงล้อ, C = 2 * pi * (D / 2) = 2 * 3.14 * 6.35 = 39.898 มม.
ดังนั้นระยะทางที่เดินทางต่อขั้นตอน = C / N = 39.898 / 24 = 1.6625 มม.
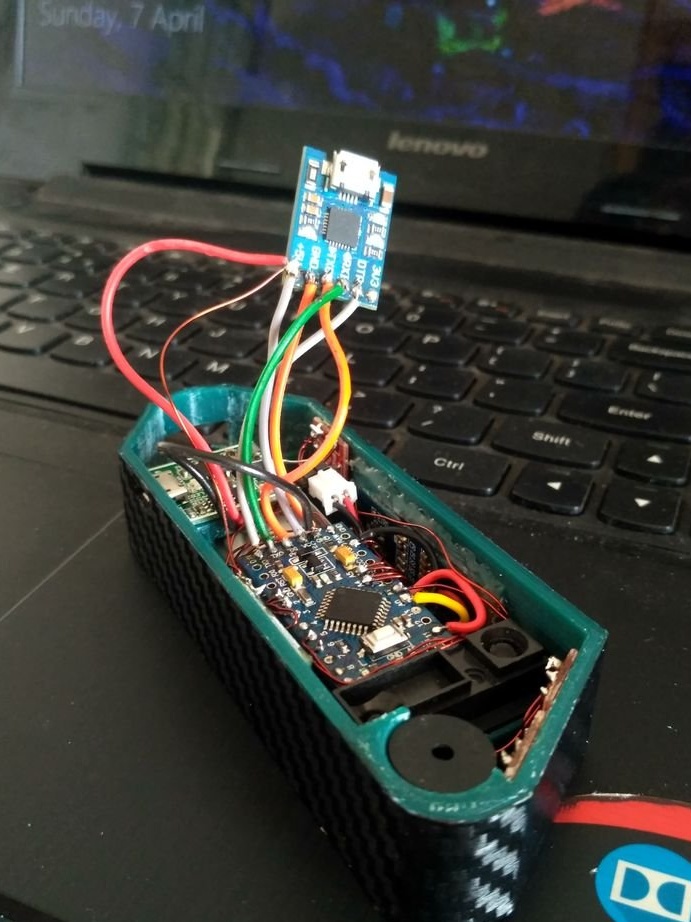
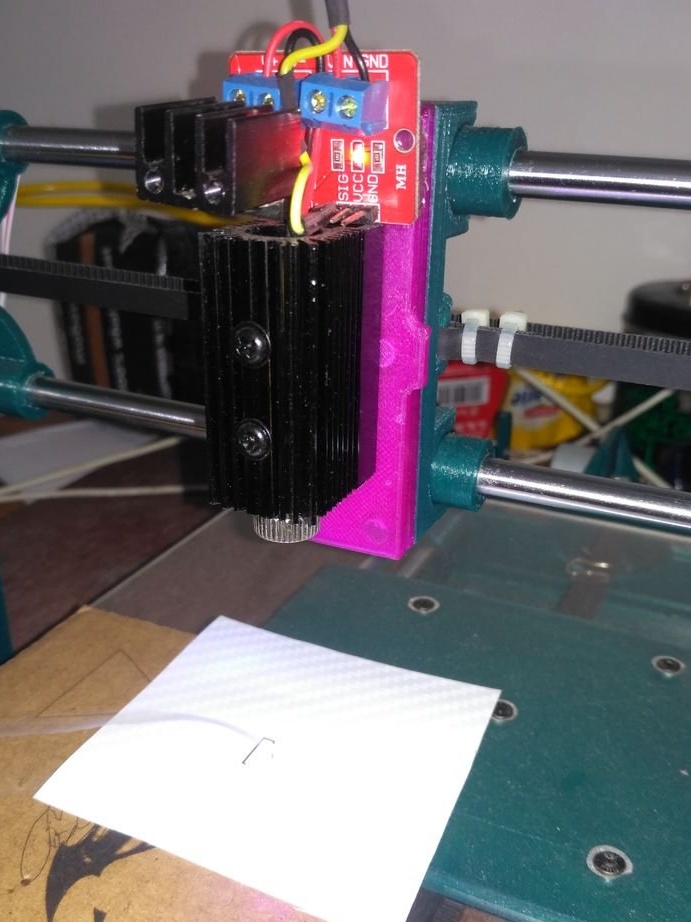
ขั้นตอนที่สิบสี่: การทดสอบ
ก่อนทำการติดตั้งฝาครอบตัวเรือนจะทำการทดสอบเซ็นเซอร์โมดูลชาร์จปุ่มจอแสดงผล



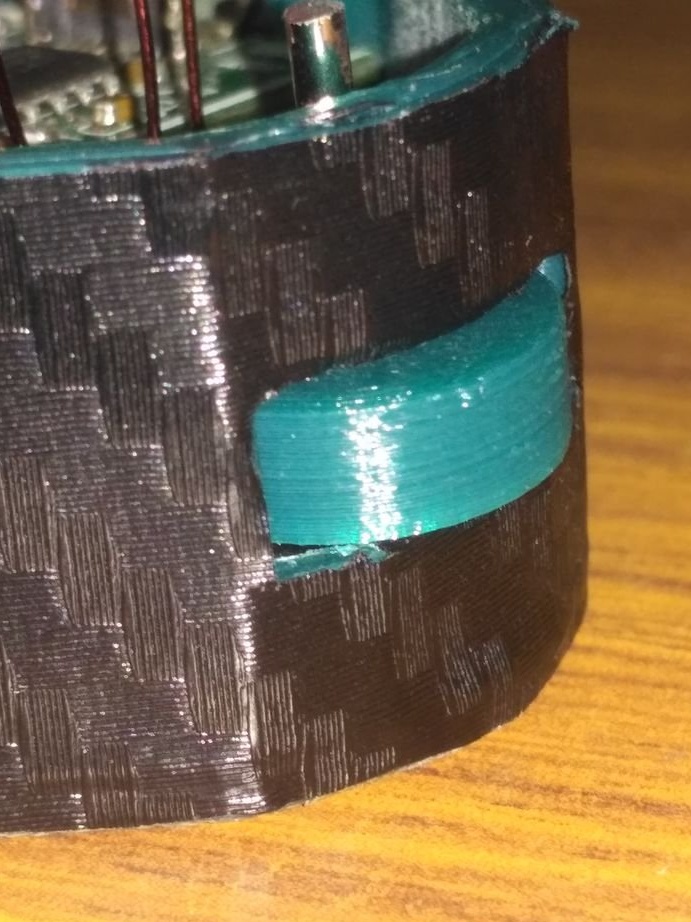
ขั้นตอนที่สิบห้า: การประกอบปุ่มและเคส
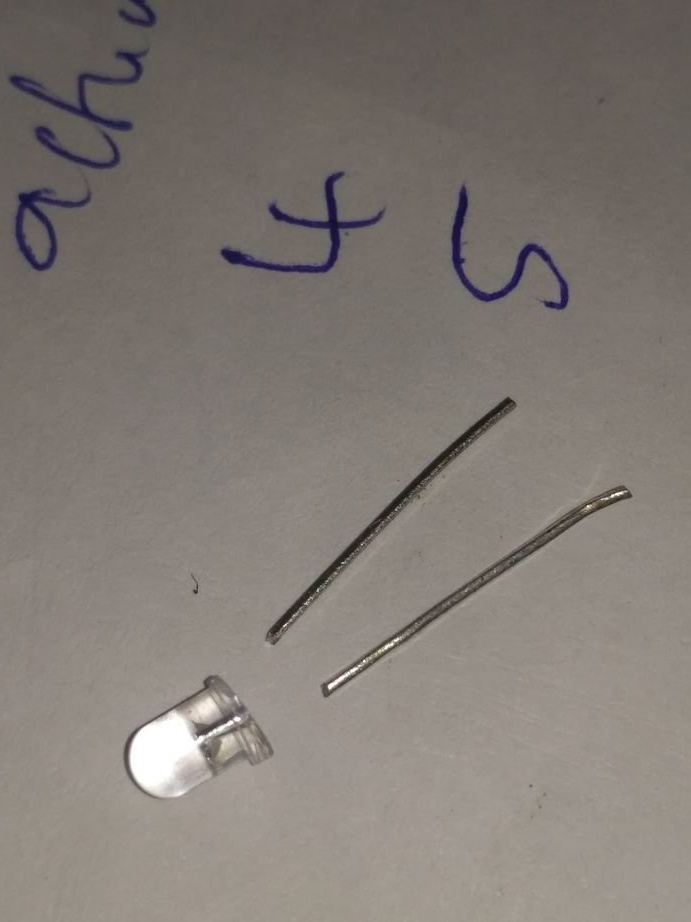
ปุ่มเปิด / ปิดเครื่องบนกระดานชาร์จสั้นและต้นแบบตัดขาตั้ง LED เพิ่มเติมซึ่งจะกดปุ่ม



กาวสองส่วนของร่างกาย





ขั้นตอนที่สิบหก: ทำเครื่องหมายปุ่ม
ตัวอักษรถูกตัดด้วยเครื่องตัดเลเซอร์และติดกาวเข้ากับร่างกาย




ทุกอย่างพร้อมจะเหลือเพียงการทดสอบอุปกรณ์ที่ใช้งาน