


ในบทความนี้พ่อมดจะบอกเราว่าเขาสร้างบาร์เทนเดอร์หุ่นยนต์ที่ควบคุมโดยสมาร์ทโฟนได้อย่างไร
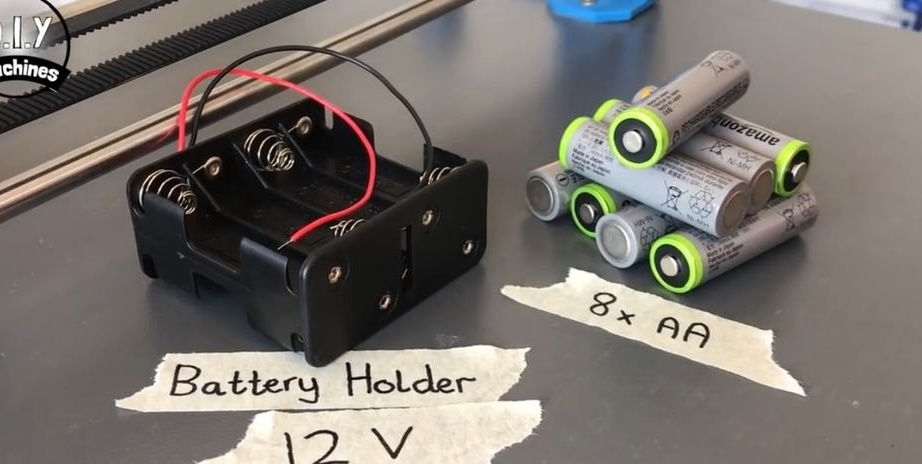
คุณสมบัติของอุปกรณ์: ทำงานบน Arduino, ราคาไม่แพง, การควบคุมบลูทู ธ จากอุปกรณ์ใด ๆ , อิสระ (ทำงานจากแบตเตอรี่ 8 AA)
ในการสร้างอุปกรณ์ดังกล่าวต้นแบบจะใช้สิ่งต่อไปนี้
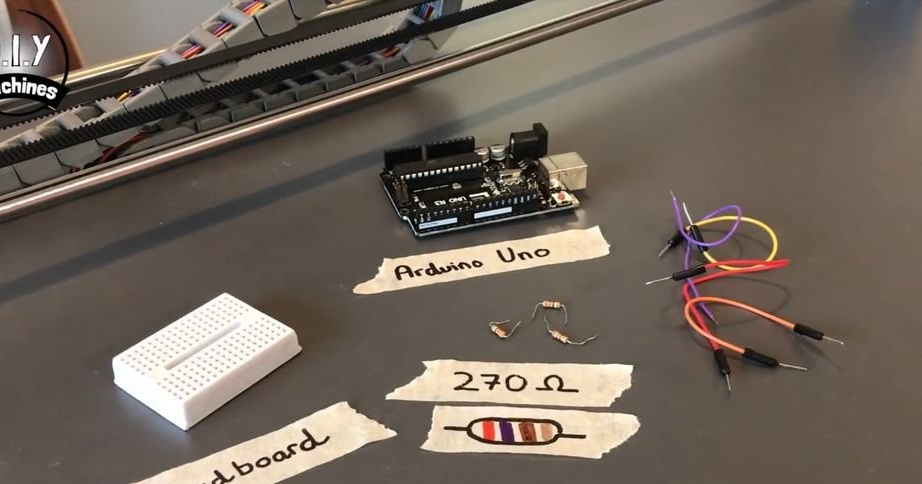
วัสดุและเครื่องมือ:
-Arduino Uno;
- เครื่องยนต์ D29D
- สวิทช์ติดต่อ;
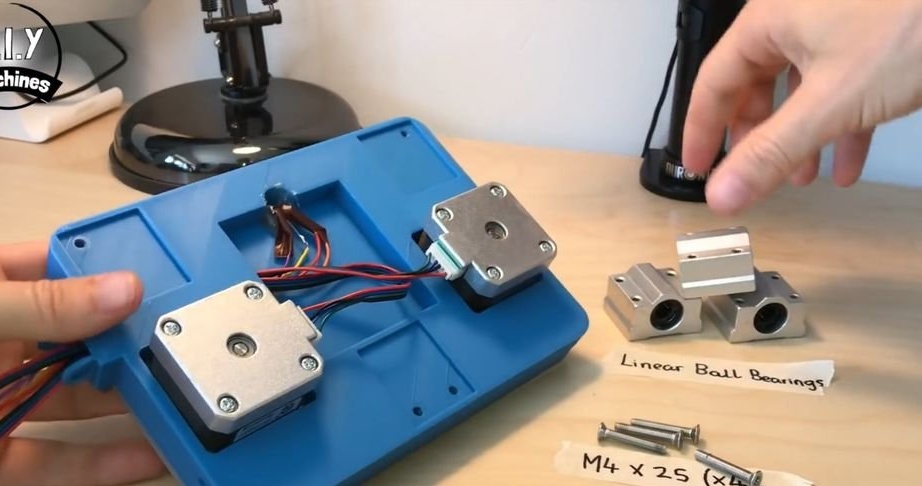
- ตลับลูกปืนเส้นโค้ง
- เครื่องยนต์ขั้นตอน;
- เข็มขัดและรอก (รุ่น 2 ม.);
- เข็มขัดและรอก (รุ่น 5 ม.);
โมดูลบลูทู ธ -HM10;
- ไขควง
-Krepezh;
-Nozhki;
- โต๊ะด้านบน;
เครื่องพิมพ์ 3D;
- แท่งโลหะ;
- ไขควง
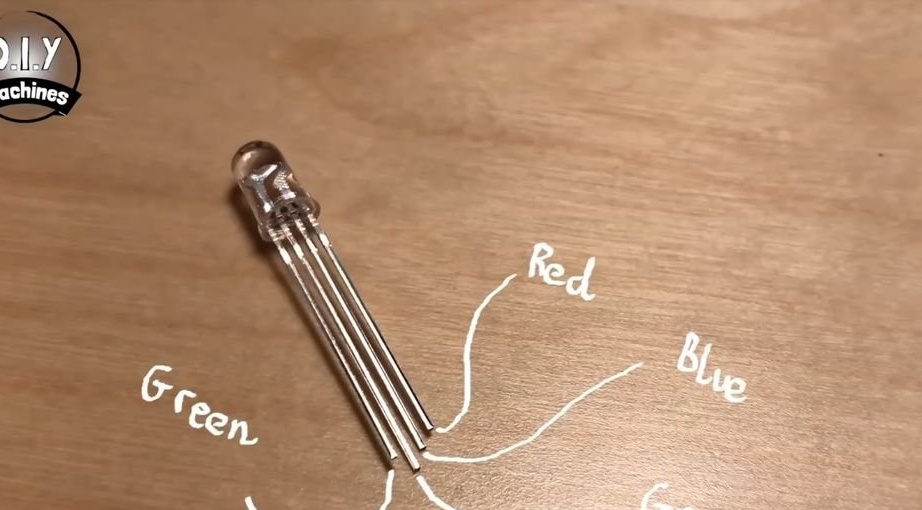
- ไฟ LED RGB;
seeing-;
- อุปกรณ์เสริมสำหรับทิ้ง;
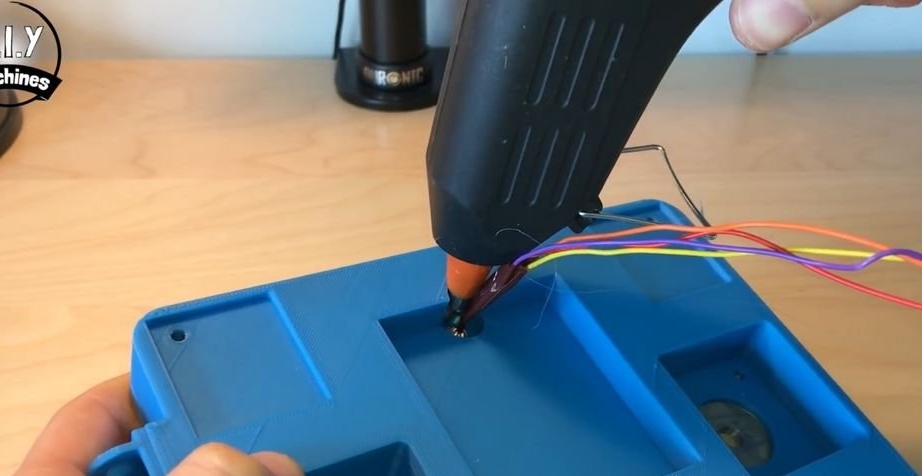
-Izolenta;
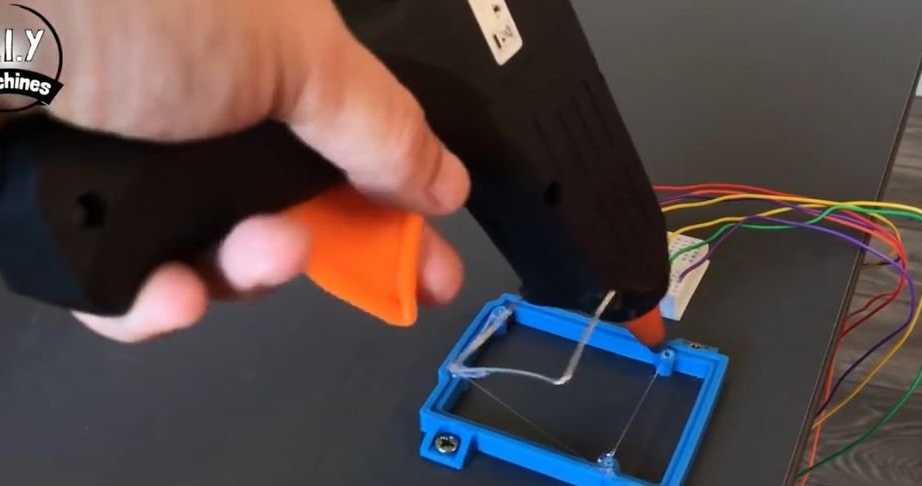
- ปืนสีฟ้า;
- ช่องใส่แบตเตอรี่
-Konnektory;
แบตเตอรี่ปุ่ม-Type;
- คอมพิวเตอร์พร้อมซอฟต์แวร์
- ผู้ถือขวด
-The วาล์ว;
-Bottle;
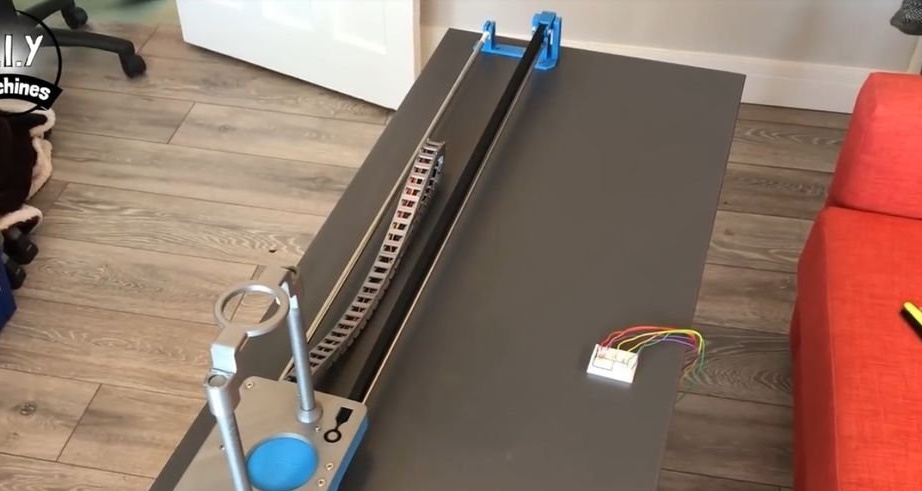
ขั้นตอนที่หนึ่ง: ตาราง
ขั้นแรกให้เจ้านายรวบรวมตาราง ขนาดโต๊ะ 120 * 45 ซม. ความหนาโต๊ะ 18 มม.


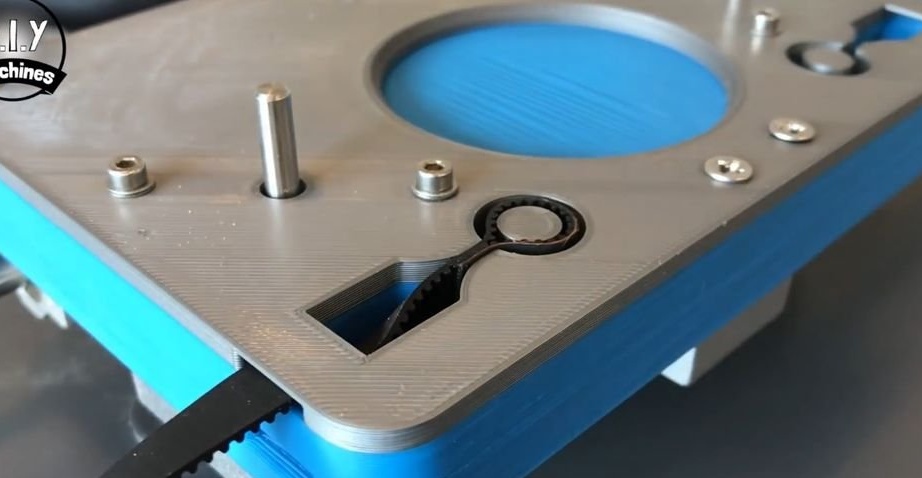
ขั้นตอนที่สอง: เครื่องปรับแรงตึง
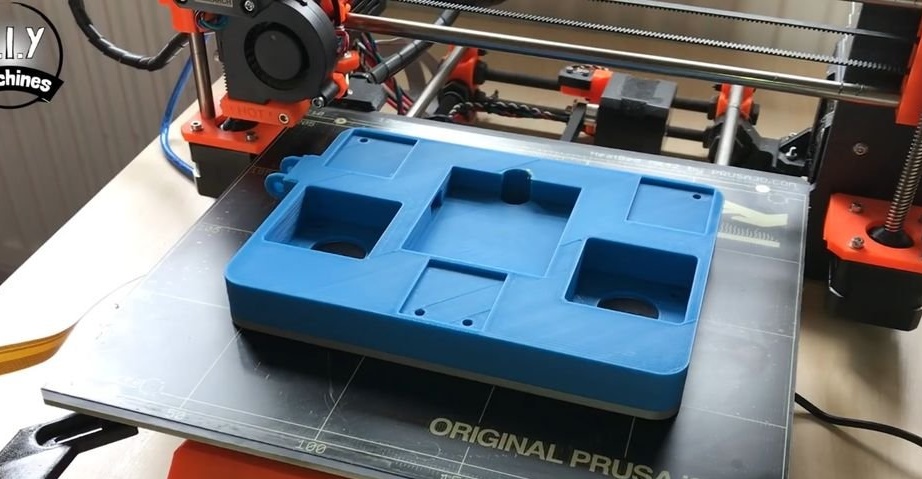
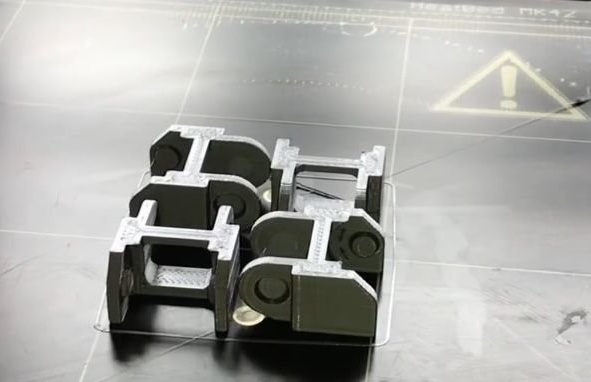
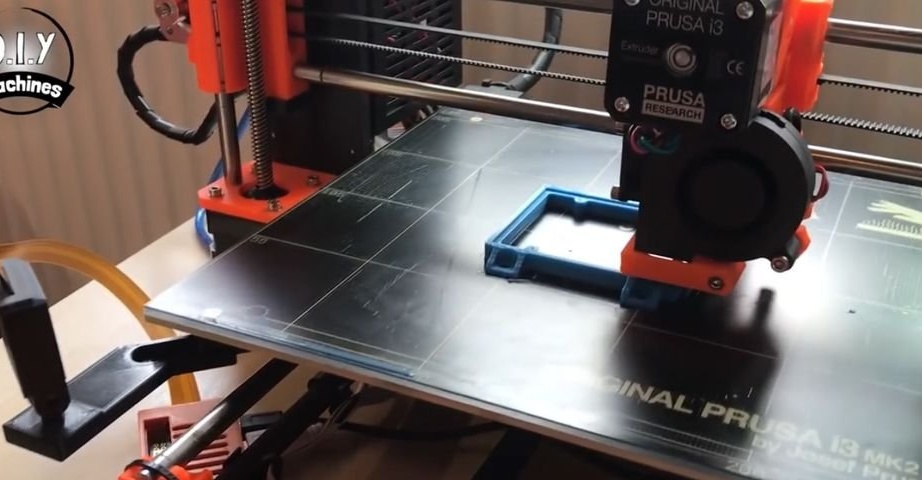
สามารถดาวน์โหลดไฟล์สำหรับชิ้นส่วนการพิมพ์ด้านล่าง
ไฟล์การพิมพ์ 3 มิติ.
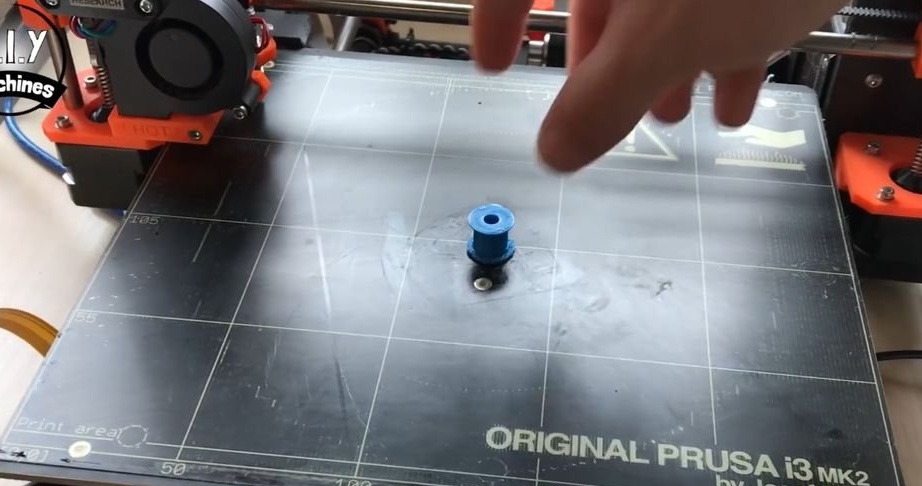
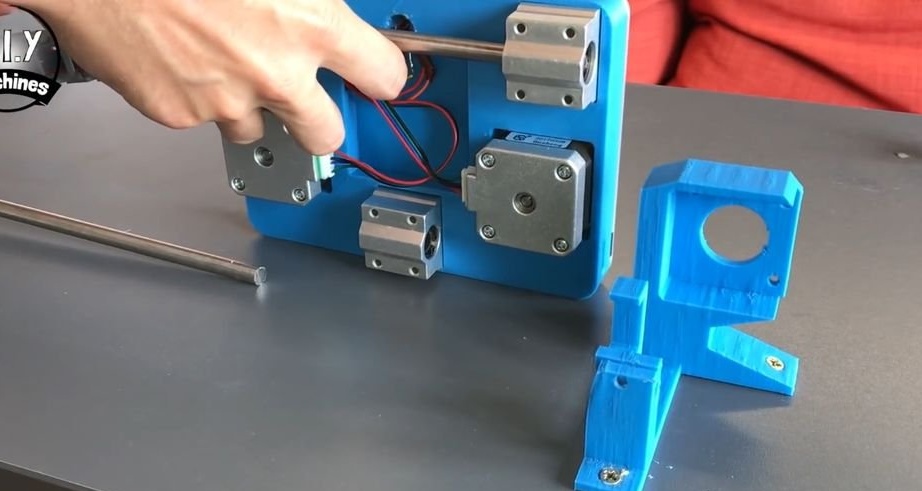
ตอนนี้จำเป็นต้องพิมพ์รายละเอียดสองรายการแรก“ idler.stl” และ“ Rod_Clamp_V5.stl”
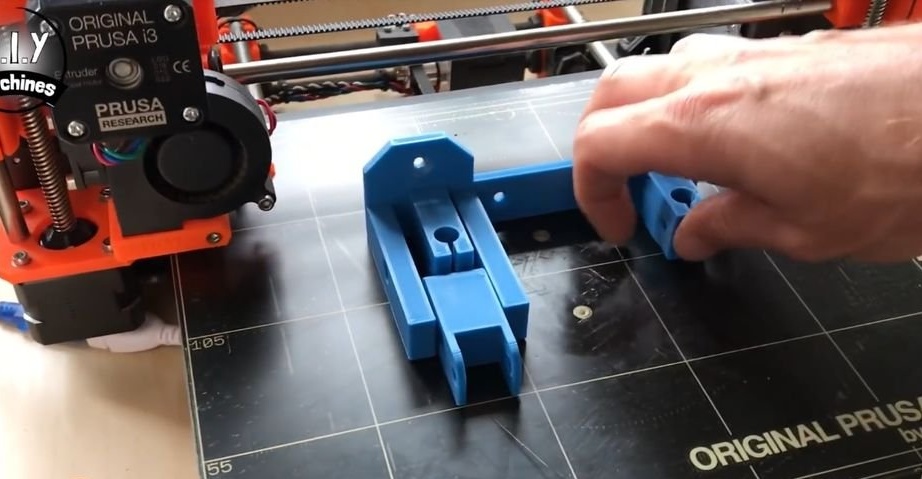
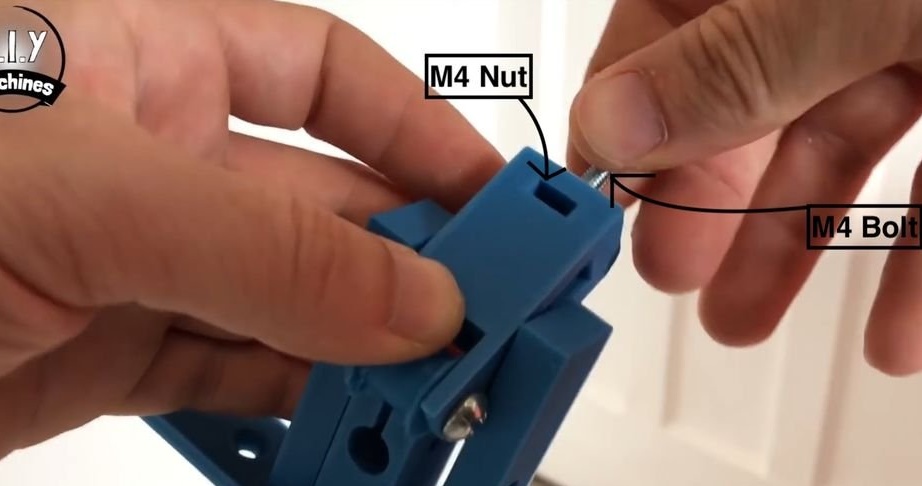
หลังจากพิมพ์แล้วจำเป็นต้องติดตั้งลูกกลิ้งดึงแรงเข้ากับตัวยึดก้านโดยใช้สายฟ้า M4 และน็อตยาว ไม่จำเป็นต้องใช้ที่หนีบแรงเนื่องจากลูกกลิ้งต้องหมุนอย่างอิสระ
จากนั้นทั้งสองส่วนจะติดกัน
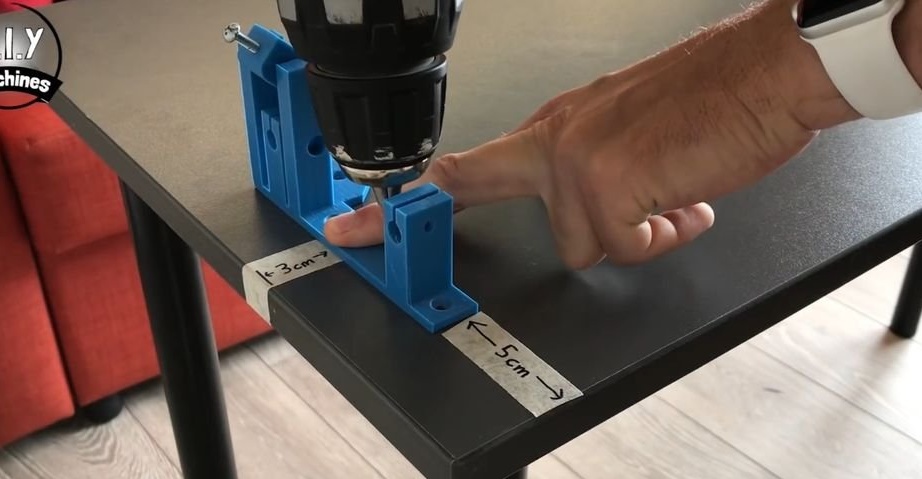
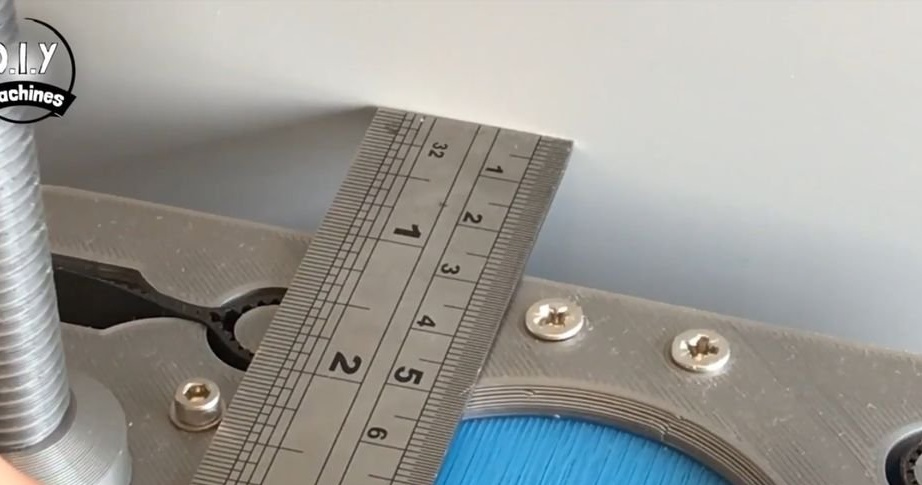
ทำเครื่องหมายบนโต๊ะ 3 ซม. จากปลายสั้นด้านซ้ายและ 5 ซม. จากขอบด้านหน้าและปรับความตึง

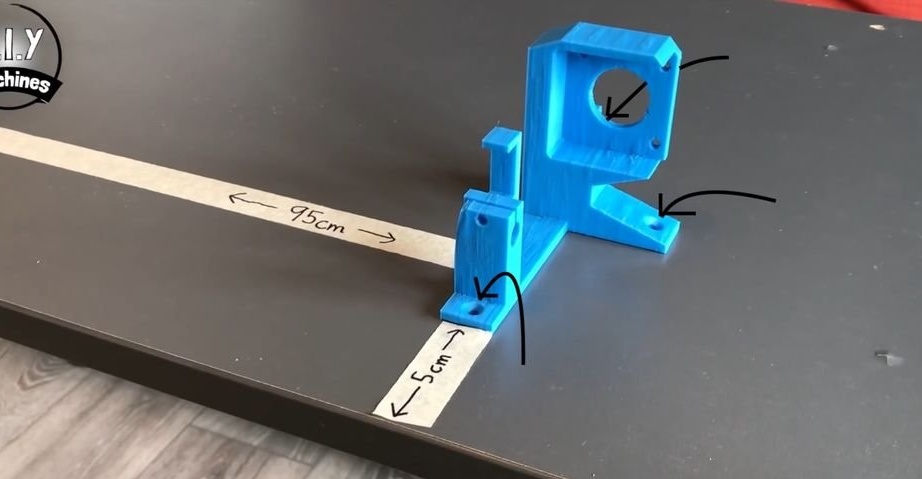
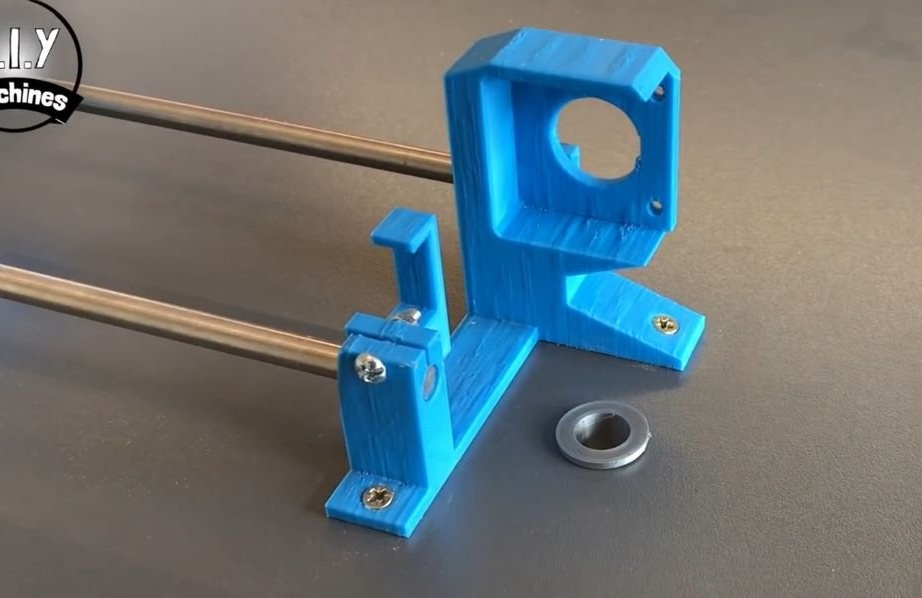
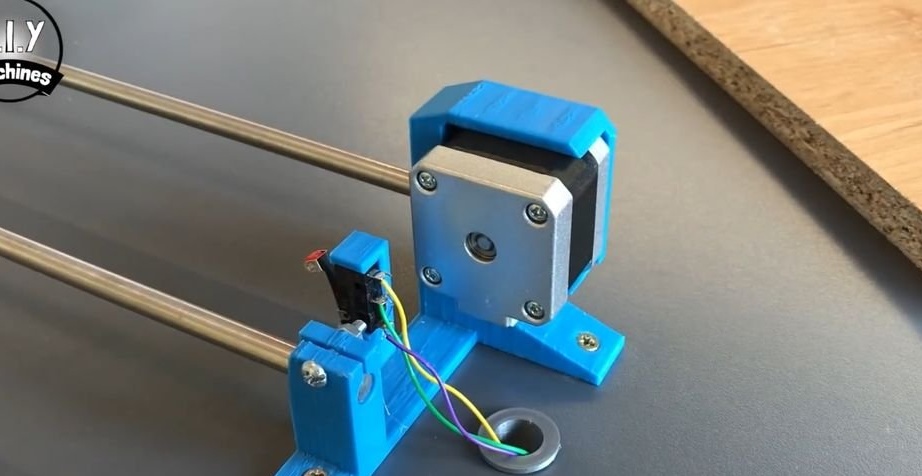
ขั้นตอนที่สอง: เมาเครื่องยนต์
พิมพ์เมานต์ของเครื่องยนต์ไฟล์ "X_Axis_Motor_Mount.stl" ยึดบนโต๊ะที่ระยะ 95 ซม. จากตัวปรับความตึงและ 5 ซม. จากขอบโต๊ะ
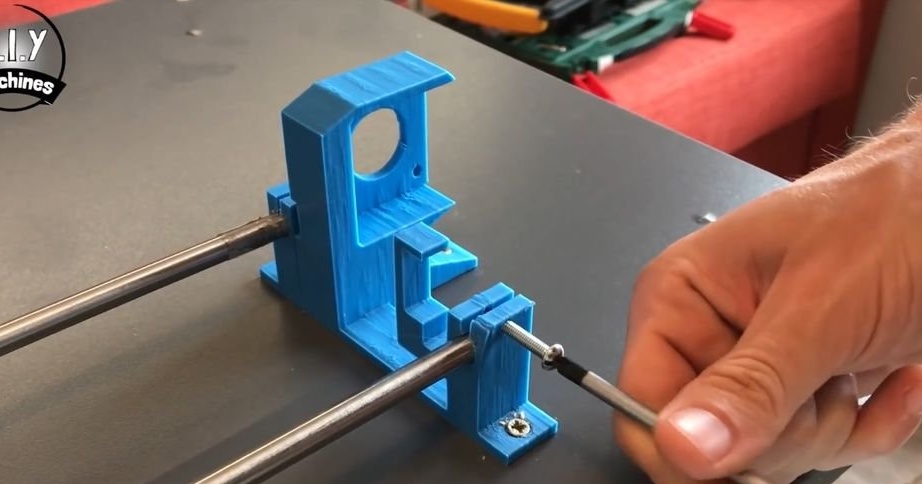
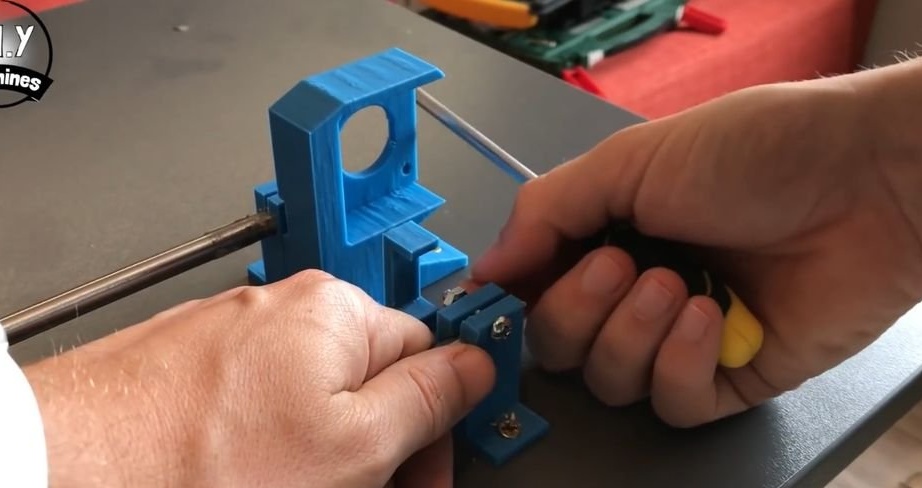
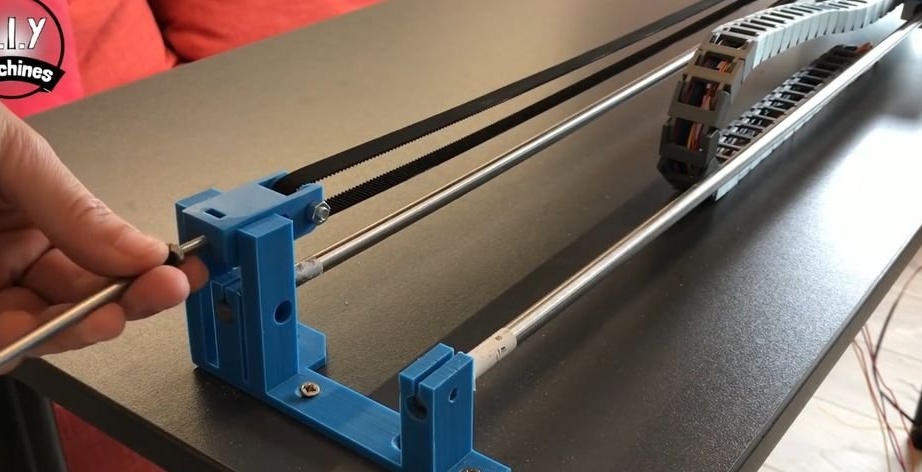
ขั้นตอนที่สาม: คำแนะนำ
ชุดคู่มือ ความยาวของแท่งคือ 1 เมตร
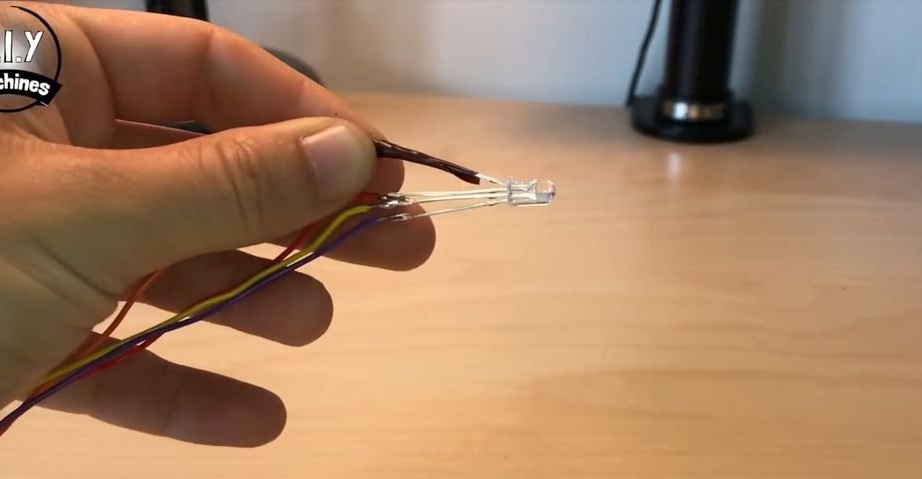
ขั้นตอนที่สี่: LED
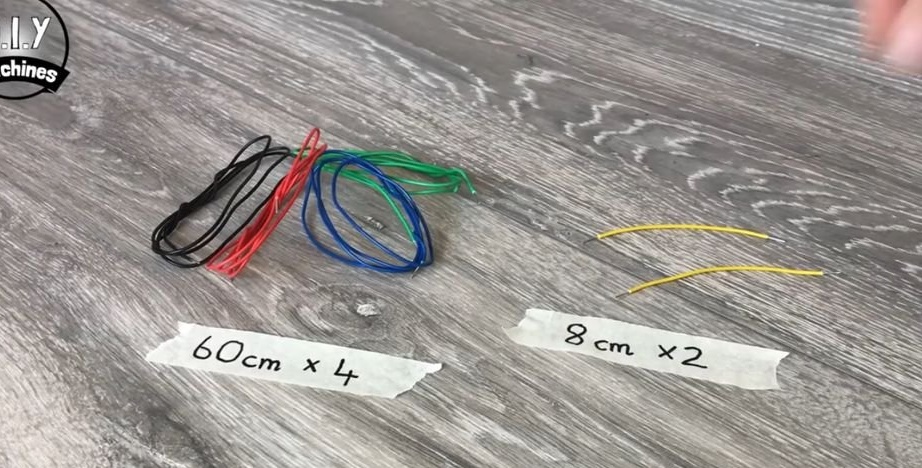
ต้นแบบจะใช้ไฟ LED RGB เพื่อบ่งชี้ บัดกรีสายไฟที่มีสีต่างกัน 180 ซม. สำหรับขาแต่ละข้าง ชุมทางแยก




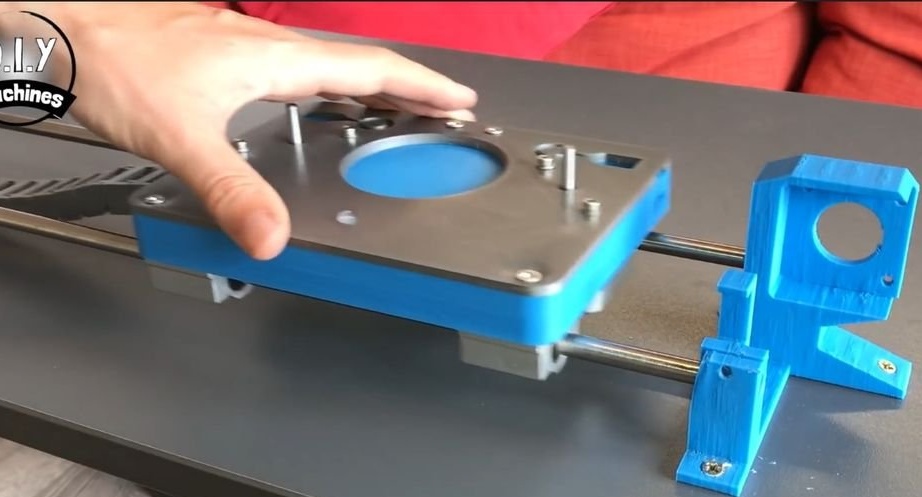
ขั้นตอนที่ห้า: แพลตฟอร์ม
พิมพ์ส่วน 'slider_base_v3.stl' แก้ไข LED ติดตั้งสเต็ปเปอร์มอเตอร์
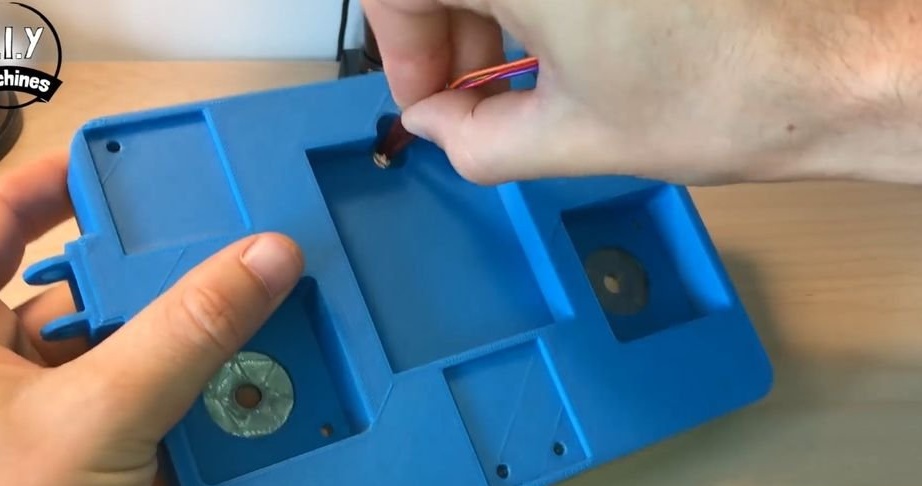

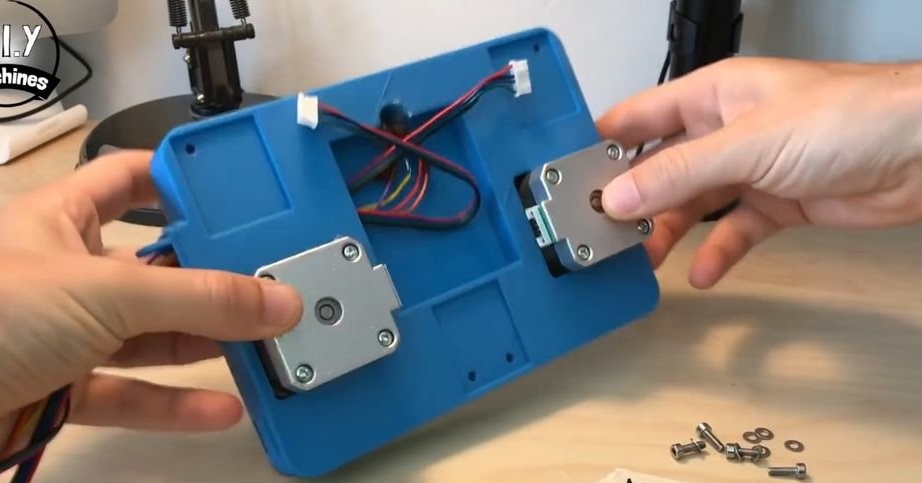
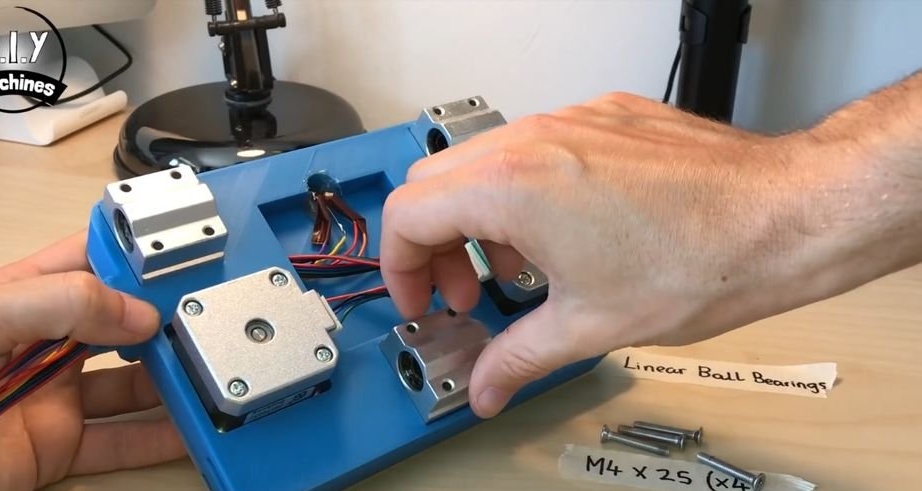
ติดตั้งตลับลูกปืนเชิงเส้น
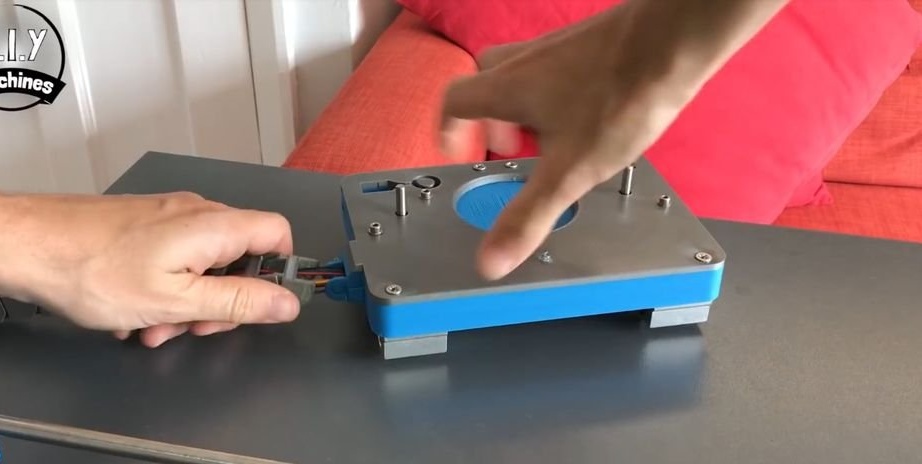
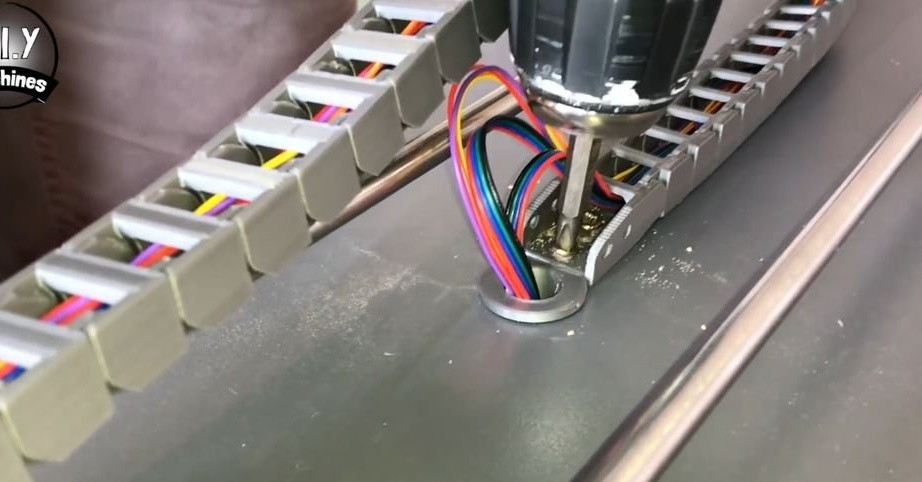
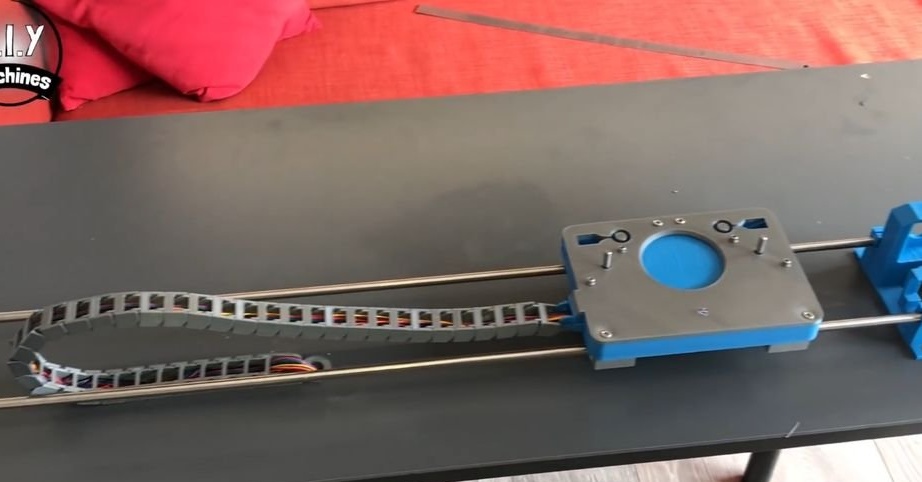
ขั้นตอนที่หก: เคเบิลทีวี
ช่องเคเบิลสำหรับอุปกรณ์ประกอบด้วยส่วนแยกที่เชื่อมต่อในวงจรเดียวภายในวงจรมีการวางสายไฟ โซ่สามารถเคลื่อนย้ายและโค้งได้ถ้าจำเป็น ส่วนของโซ่จะถูกพิมพ์บนเครื่องพิมพ์เช่นกัน


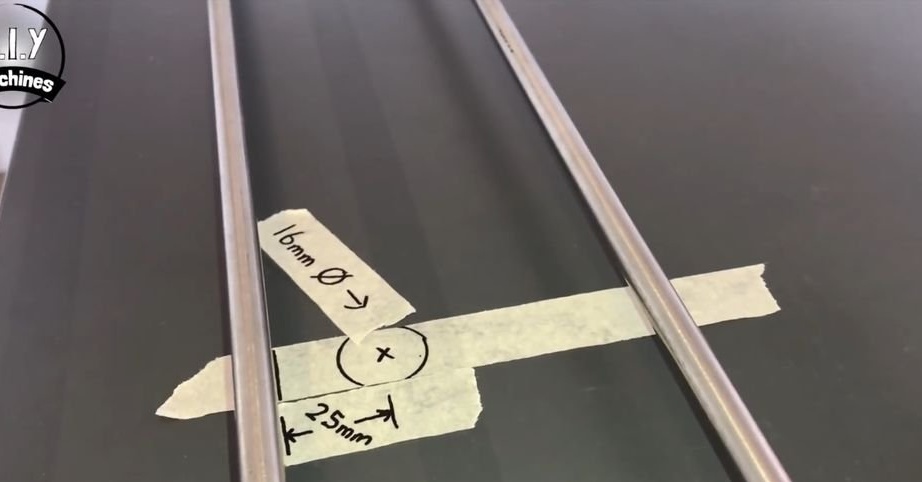
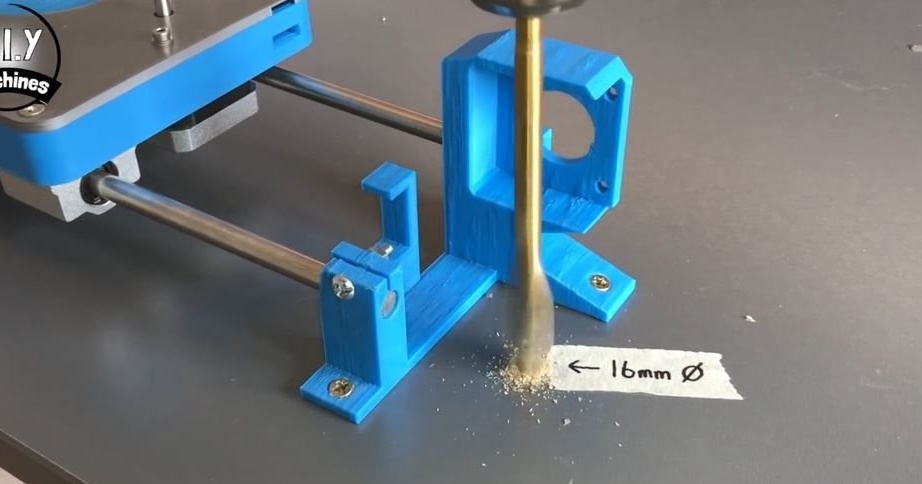
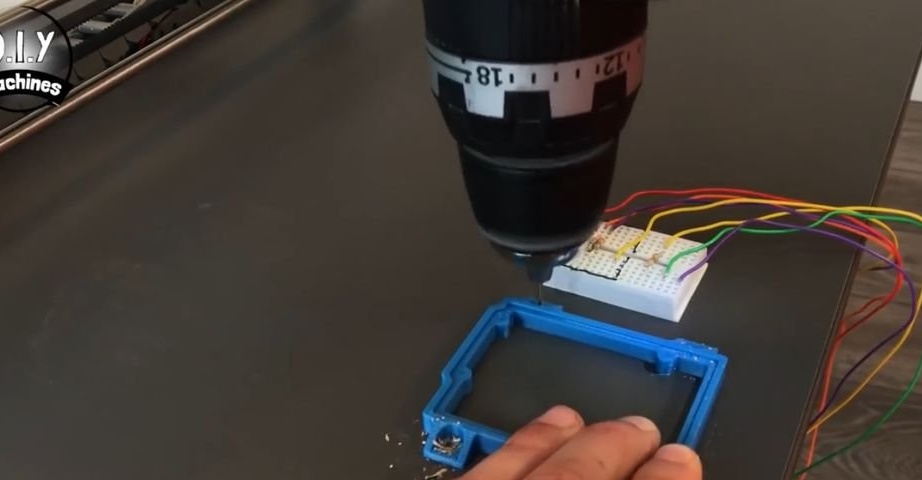
ที่ระยะ 25 มม. จากตัวนำทางมากและ 47 ซม. จากตัวปรับความตึงเจาะรูขนาด 16 มม. แทรกแขน "Table_Tidy.STL" เข้าไปในช่อง ยึดช่องเคเบิลปลายด้านหนึ่งบนแท่นที่สองให้แน่นบนเคาน์เตอร์ถัดจากแขนเสื้อ เหยียดสายไฟ



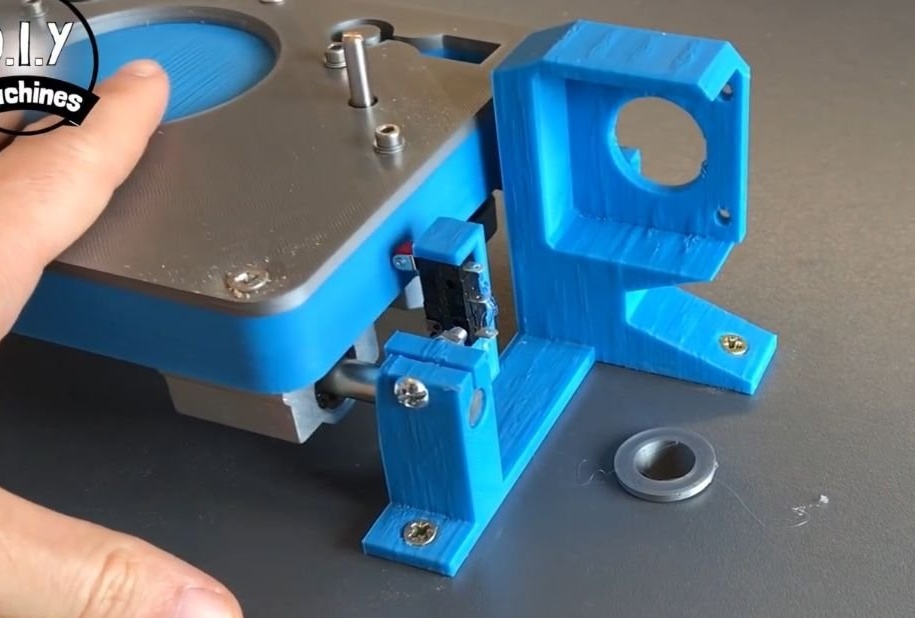
ขั้นตอนที่เจ็ด: สวิตช์
ถัดจากแท่นเครื่องยนต์จะมีการเจาะรูอีก 16 มม. สอดแขนเข้าไป ยึดรถพ่วงเข้ากับเมานต์ ประสานไปยังหน้าสัมผัสของมันสำหรับลวด 1 เมตร

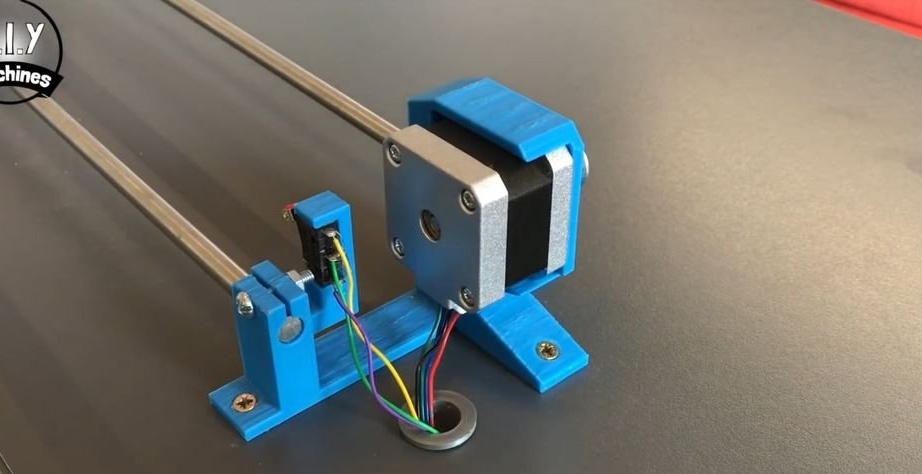
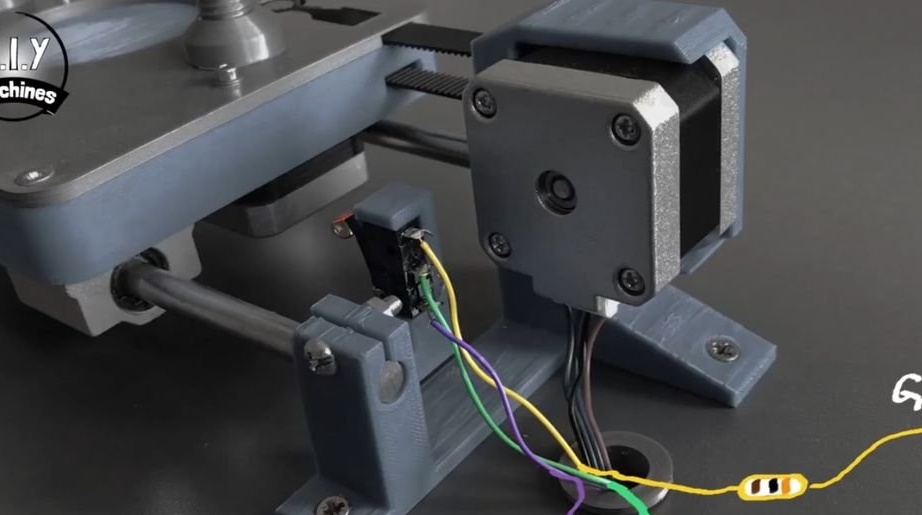
ขั้นตอนที่แปด: เครื่องยนต์แกน X
ยึดเครื่องยนต์เพื่อยึด

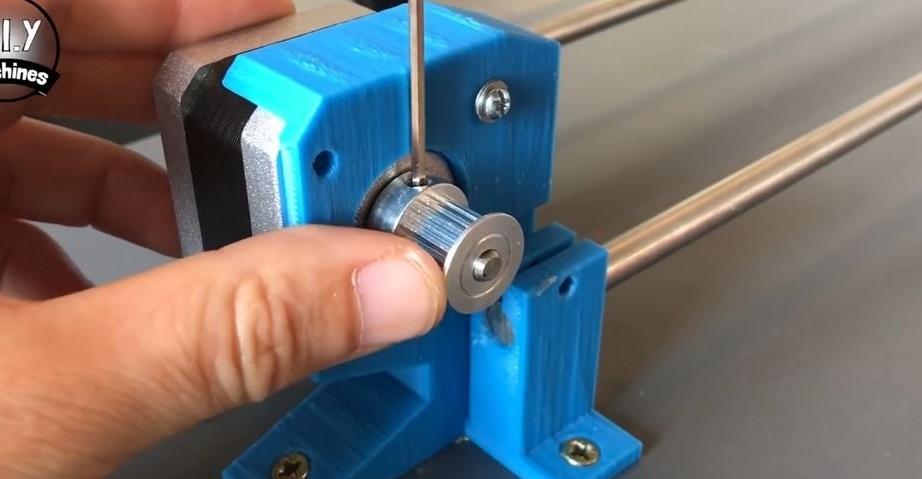
ขั้นตอนที่เก้า: เข็มขัด
ยึดรอกกับเพลามอเตอร์ ยึดปลายสายพานเข้ากับที่ยึดฐาน ดึงสายพานผ่านรอกและดึงรอกปรับแรงดึง ยึดปลายที่สองให้กับผู้ถือ หากจำเป็นสามารถปรับความตึงของสายพานได้โดยขันสกรูหรือคลายเกลียว







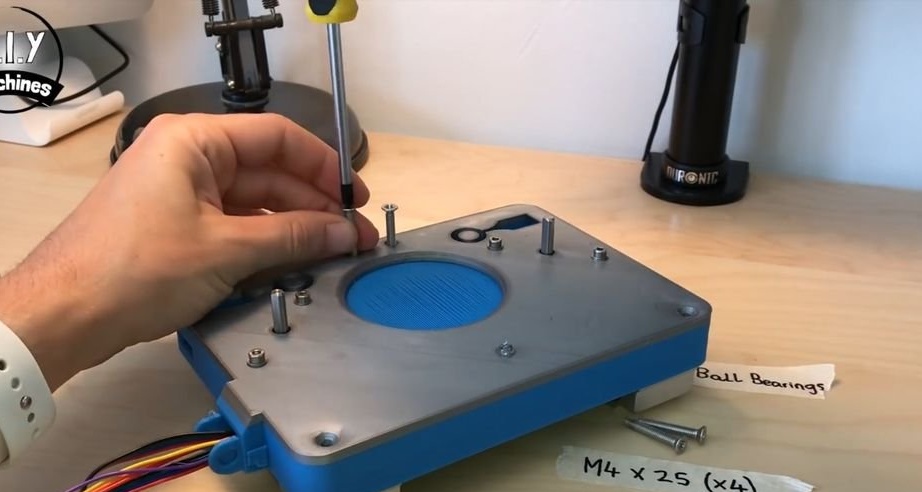
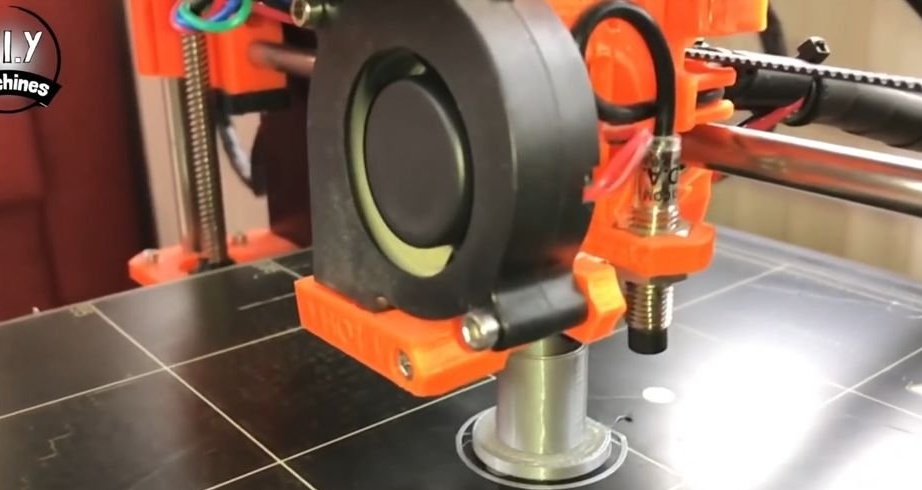
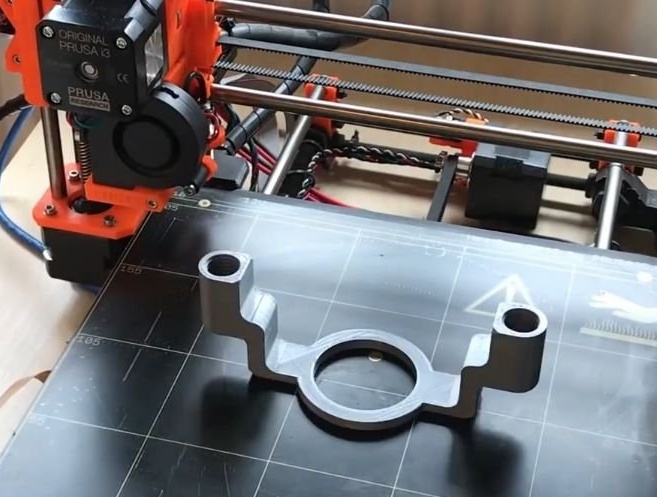
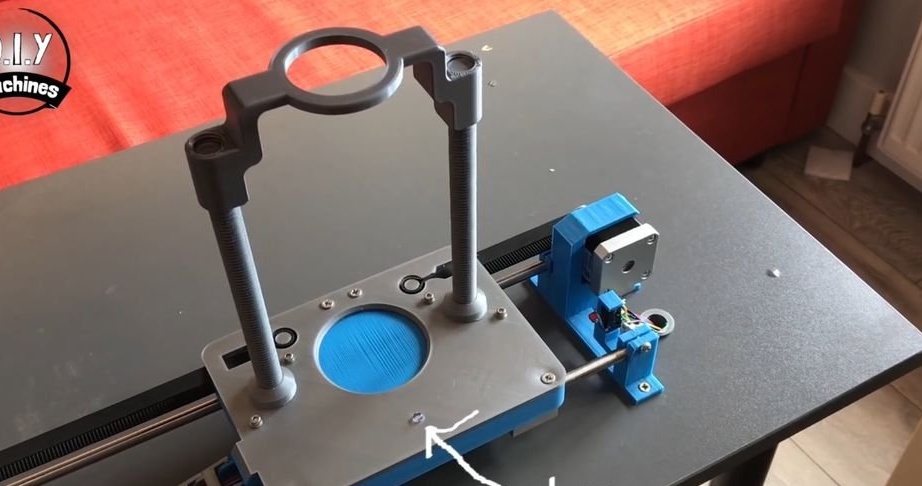
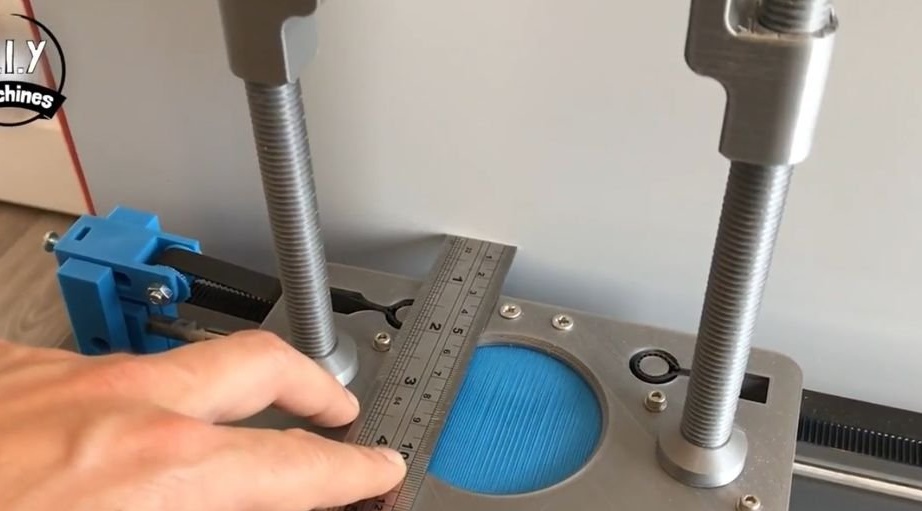
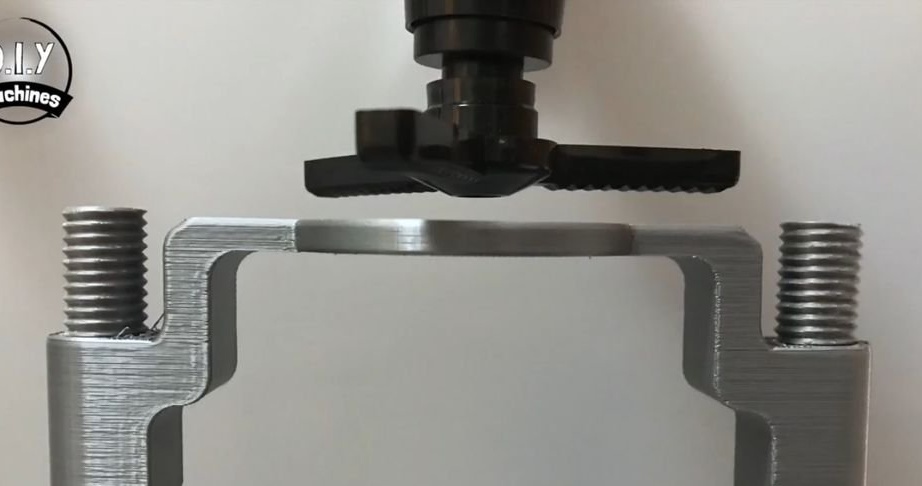
ขั้นตอนที่สิบ: ที่วางแก้ว
พิมพ์แท่งเกลียวสองอัน main_rod2.3.STL และที่ยึดเครื่องจ่ายพายพาย _ V2.STL ติดบนแพลตฟอร์ม



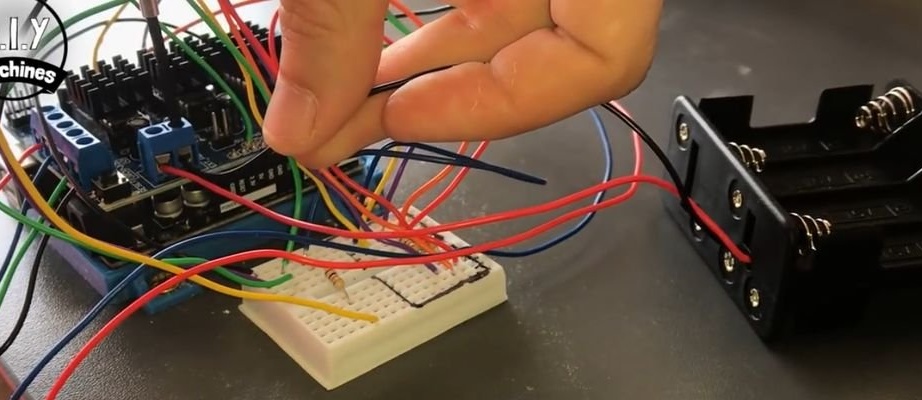
ขั้นตอนที่สิบเอ็ด: ตัวบ่งชี้รถพ่วงเขียงหั่นขนม
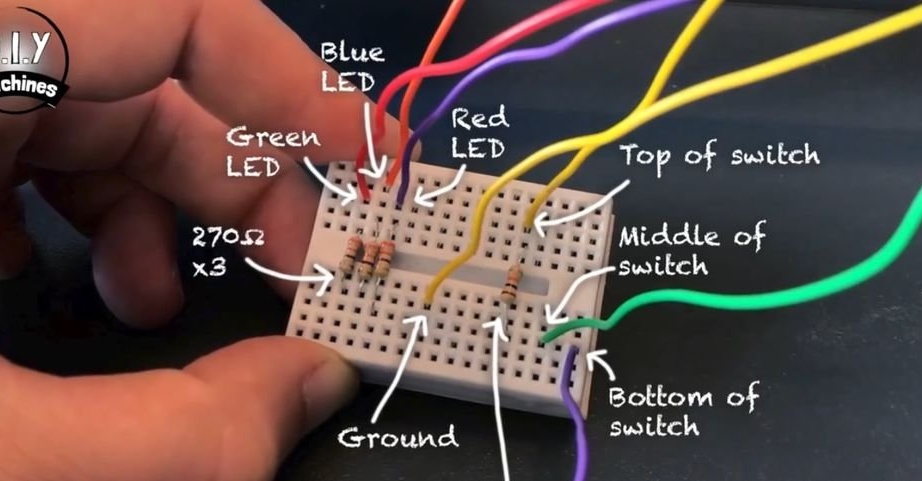
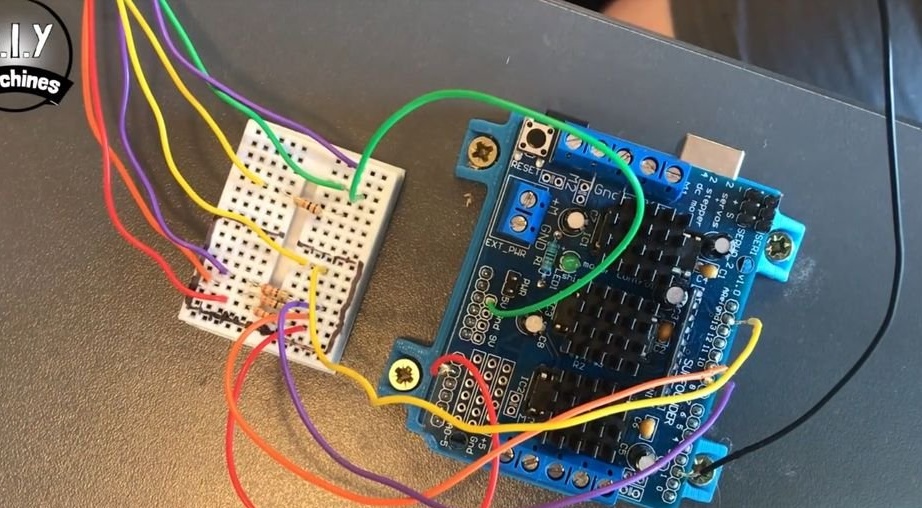
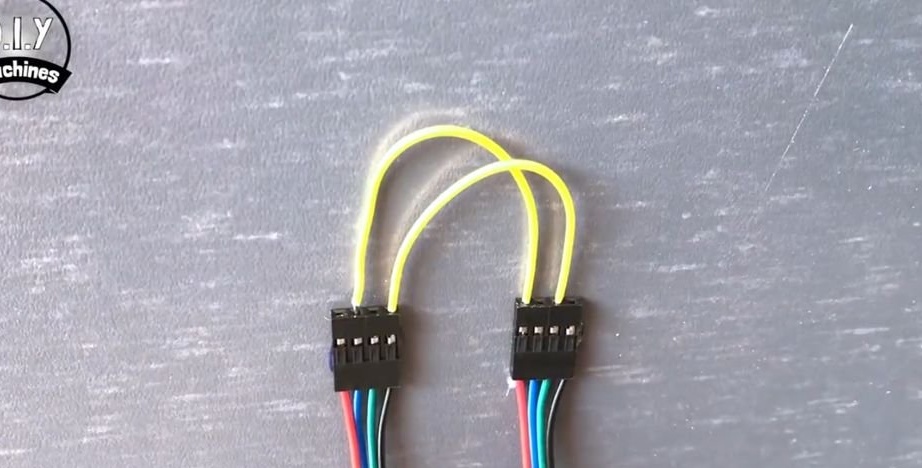
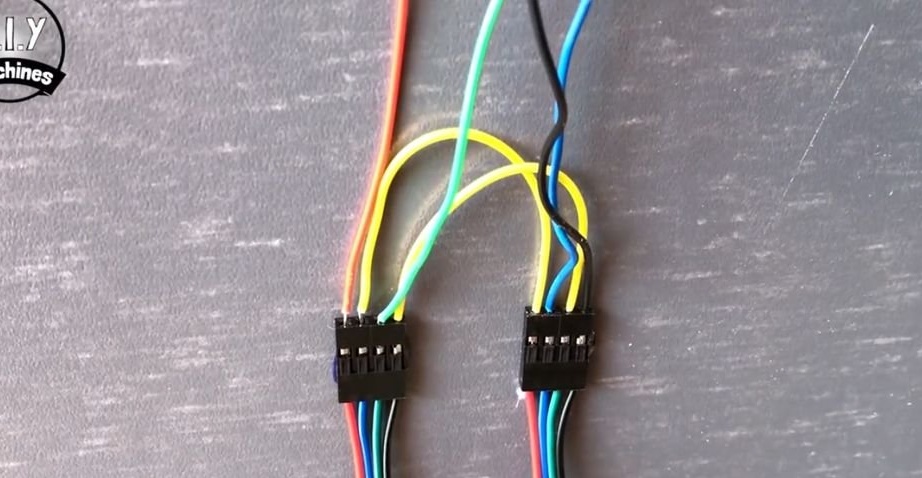
ไฟ LED RGB มีสี่ขา ขาข้างหนึ่งเป็นเรื่องธรรมดาและมีสามสี ต้นแบบใช้สายไฟเพิ่มอีกสี่เส้นแต่ละเส้นมีความยาวประมาณ 15 ซม. และทำการบัดกรีดังนี้ (ตามสีของแสงไฟ LED) ไปยังโมดูลไดรเวอร์ของเครื่องยนต์:
แดงถึงพิน D9
น้ำเงินถึงพิน D10
สีเขียวเพื่อพิน A1
แคโทดไปยังพิน GND
มันเชื่อมต่อกับรถพ่วง: หน้าสัมผัสส่วนบนคือ GND ส่วนหน้าสัมผัสตรงกลางคือ 5 V ส่วนหน้าสัมผัสด้านล่างคือช่องต่อออก 2
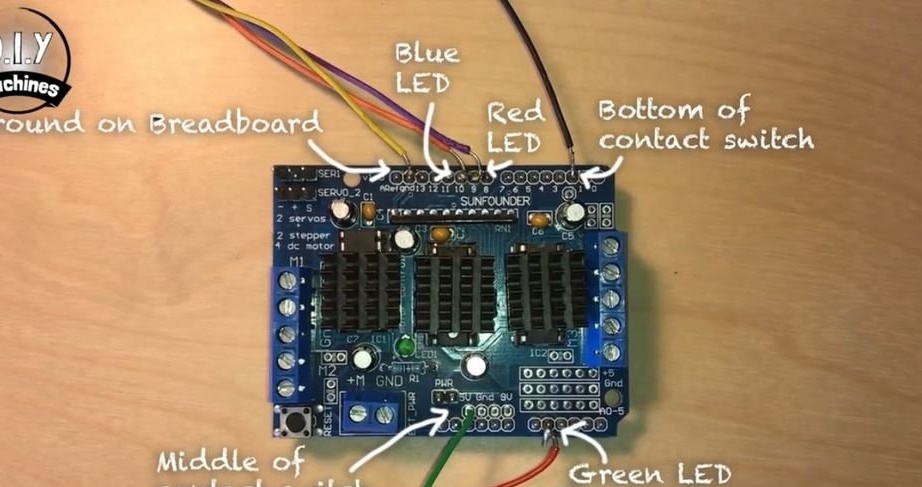
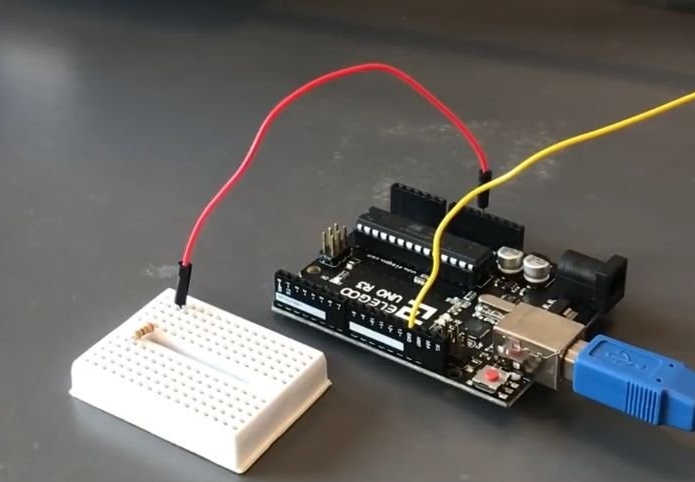
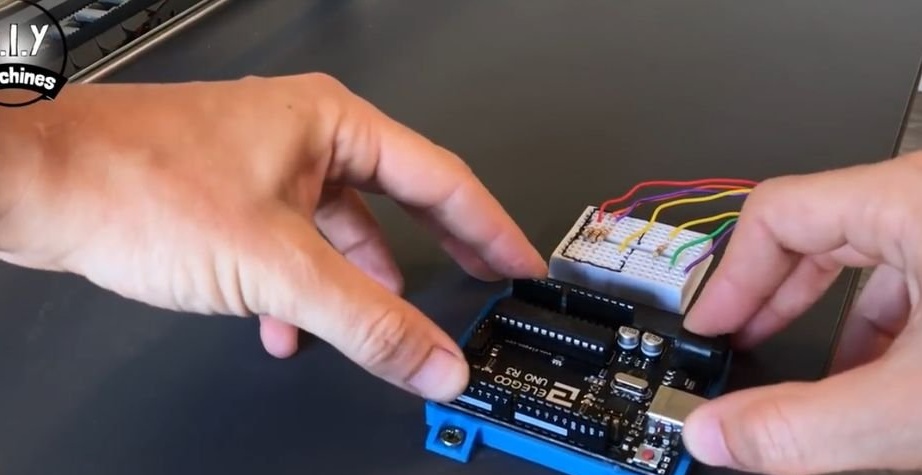
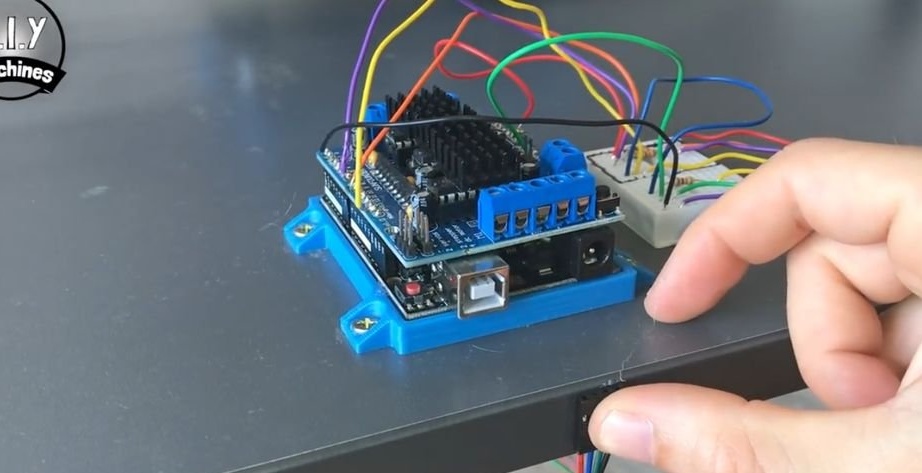
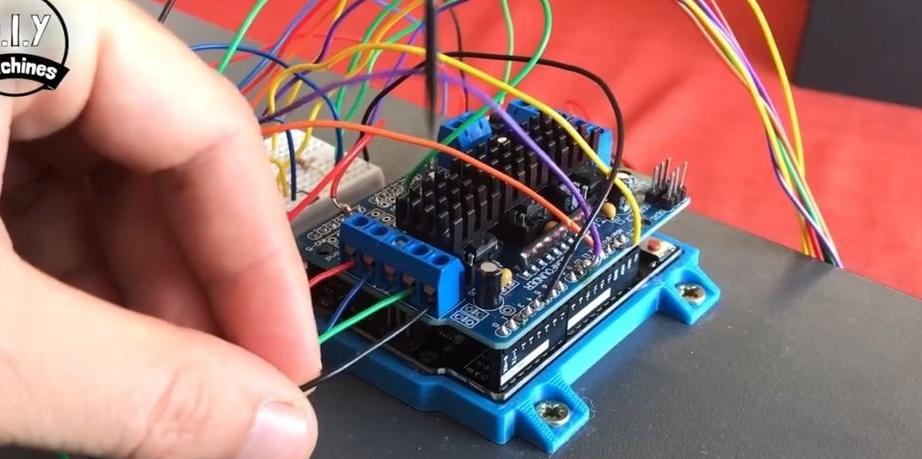
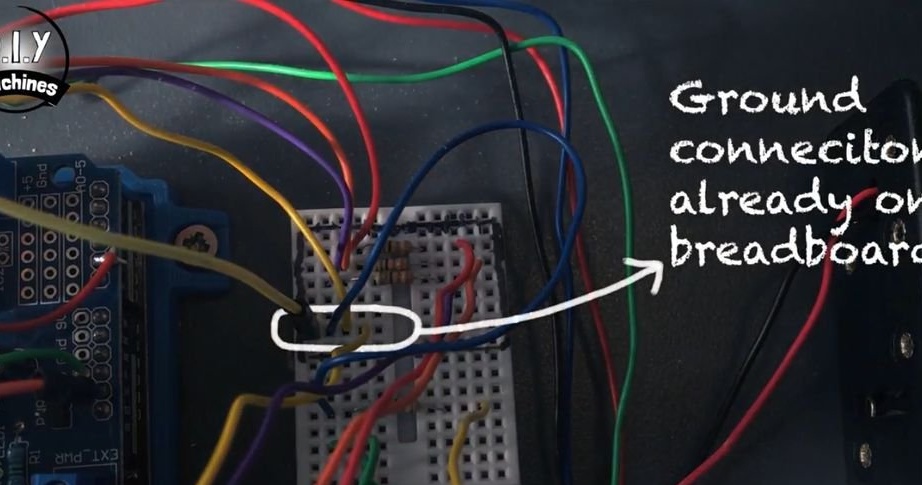
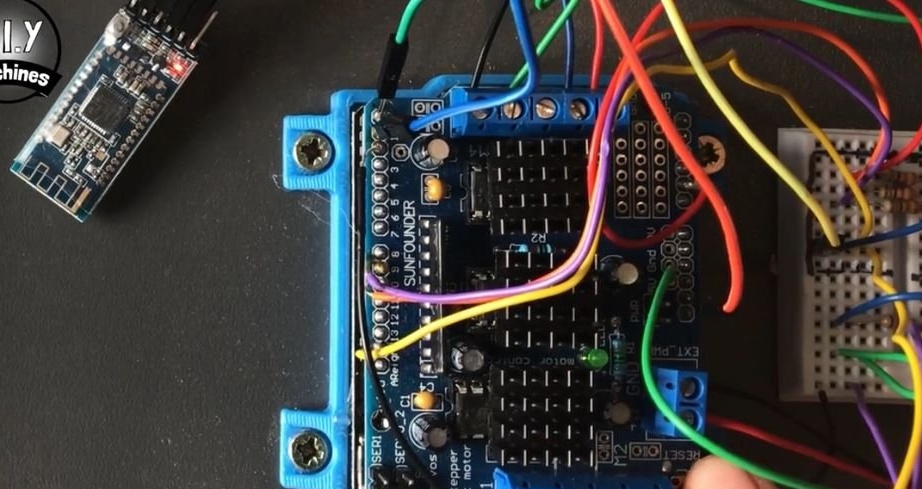
ถัดไปติดตั้งทุกอย่างบนเขียงหั่นขนม (ดูรูป) ยึดบอร์ดไว้กับโต๊ะ
ขั้นตอนที่สิบสอง: Arduino
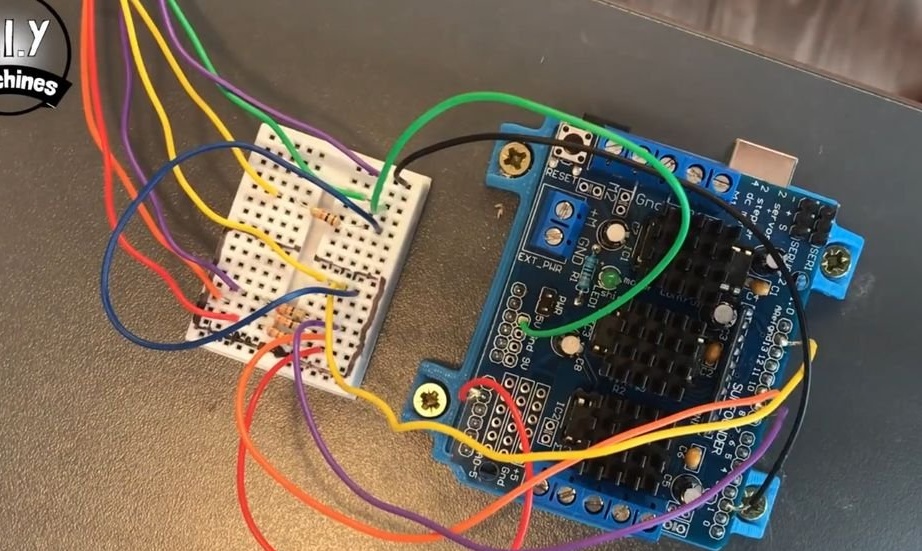
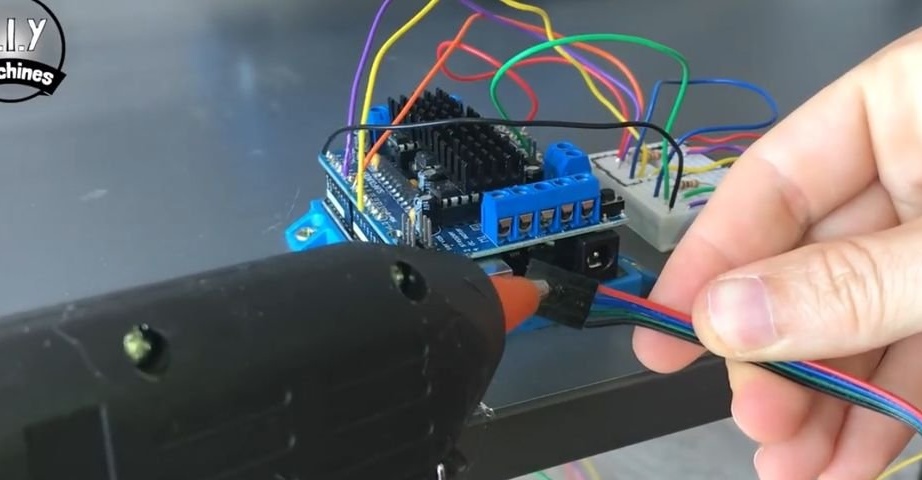
พิมพ์แผ่นยึดสำหรับ Arduino ยึดแผ่นเหล็กเข้ากับโต๊ะ ติดตั้งบนจาน Arduino ติดตั้งโมดูลไดรเวอร์ของเครื่องยนต์บน Arduino
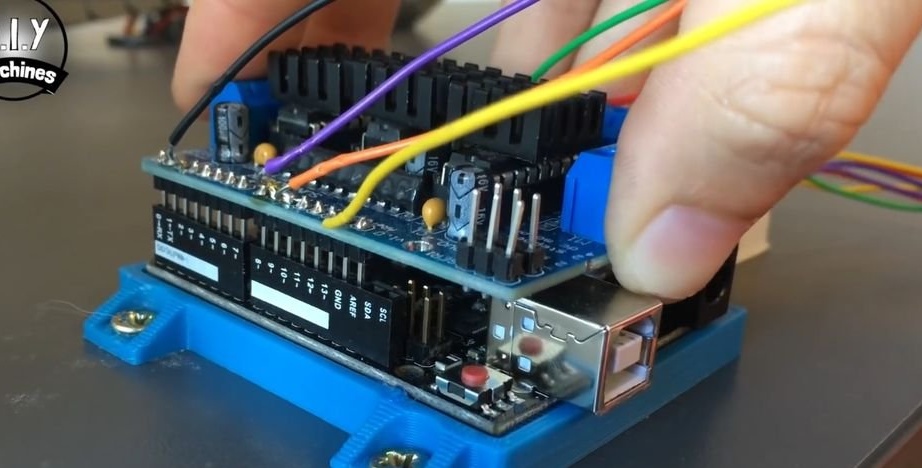
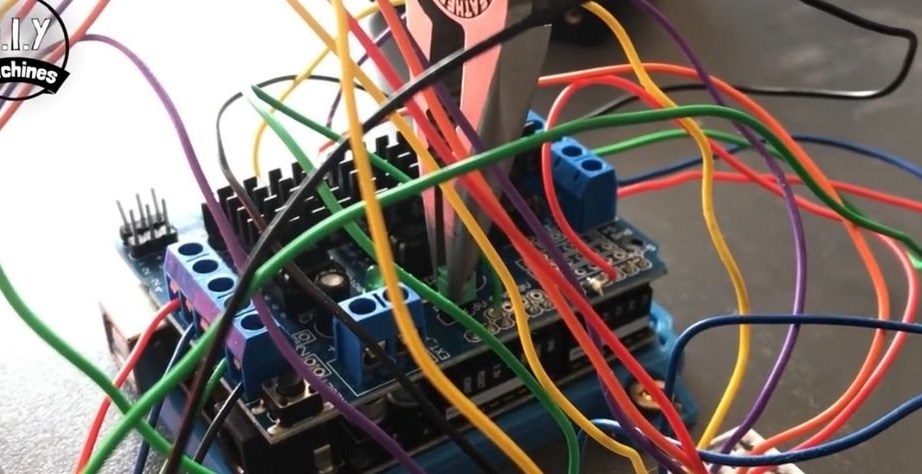
เชื่อมต่อสายไฟจากคนขับเข้ากับเขียงหั่นขนมเช่นเดียวกับในรูปถ่าย
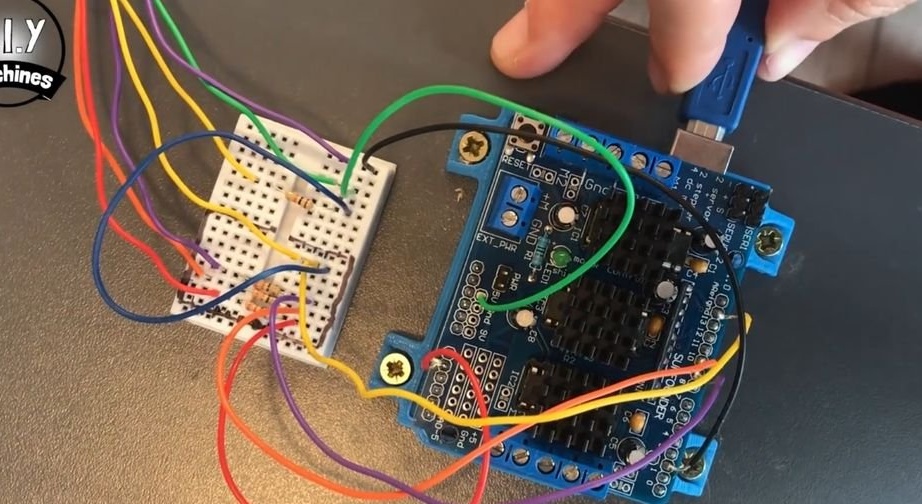
ขั้นตอนที่สิบสาม: รหัสดาวน์โหลด
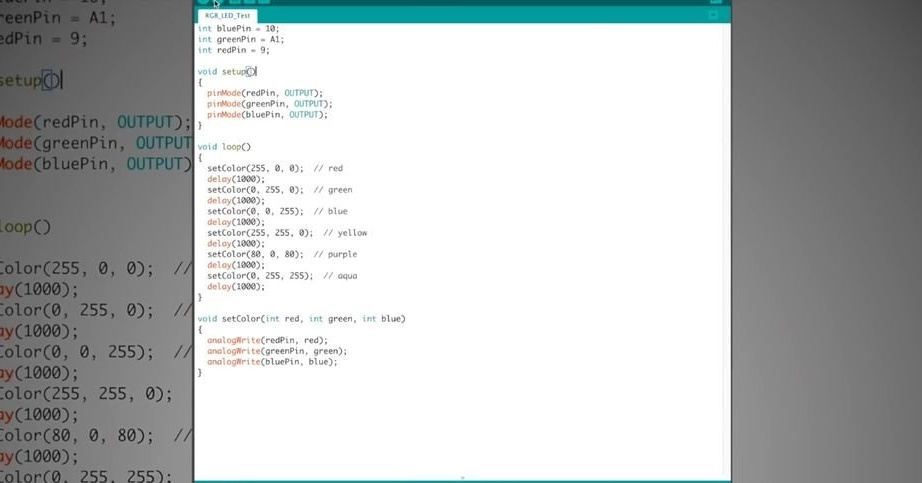
เชื่อมต่อ Arduino กับพีซีและดาวน์โหลดรหัส รหัสสามารถพบได้ ที่นี่.
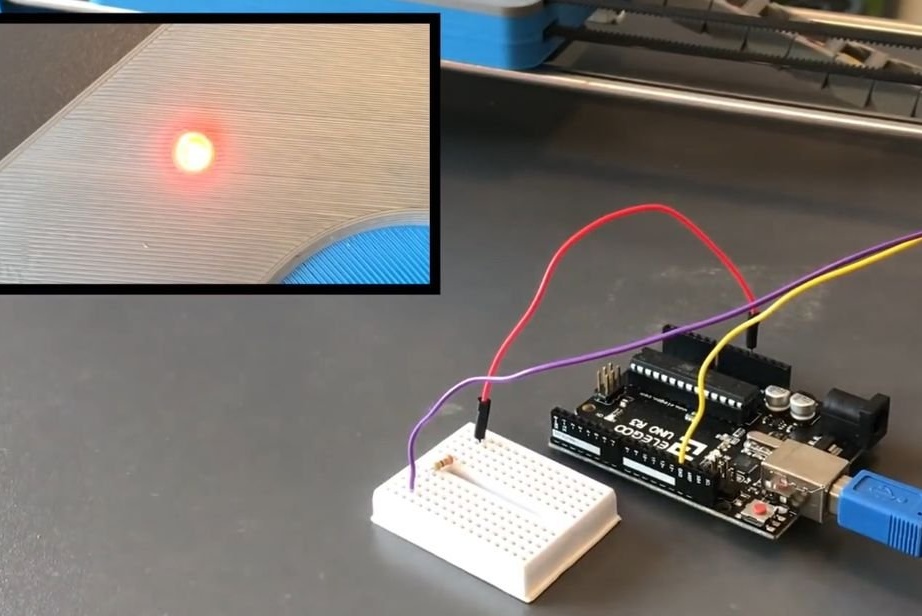
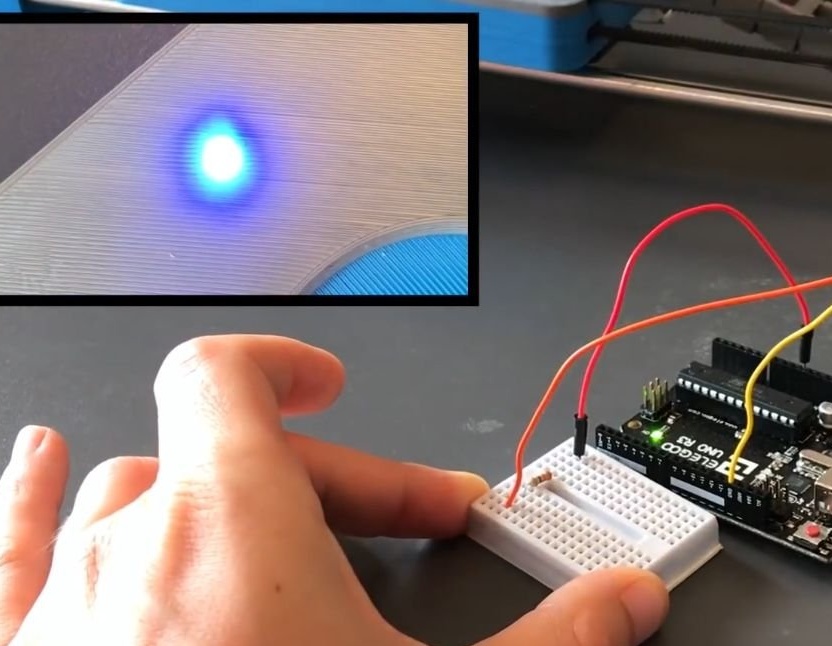
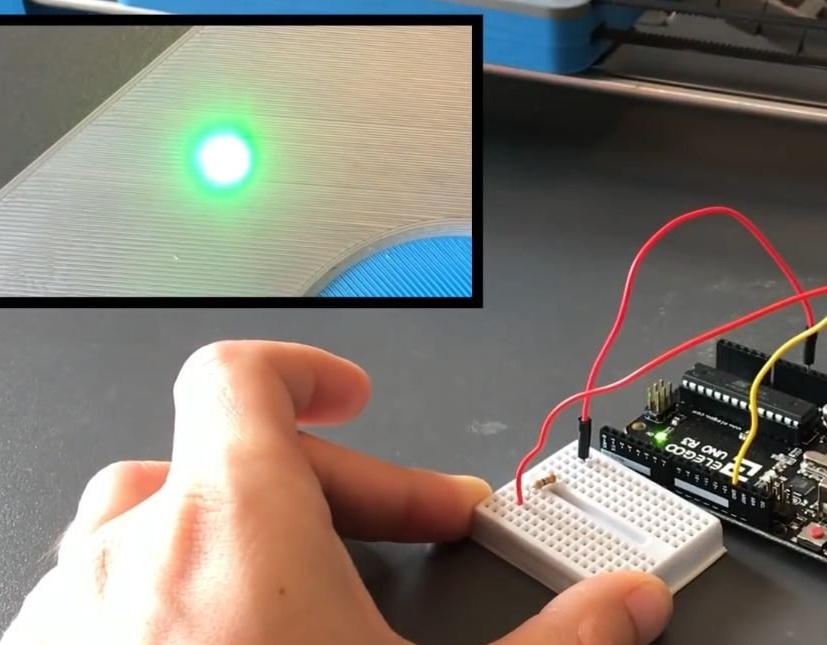
เรียกใช้รหัสทดสอบ LED ไฟ LED จะสว่างขึ้นในสีที่ต่างกัน
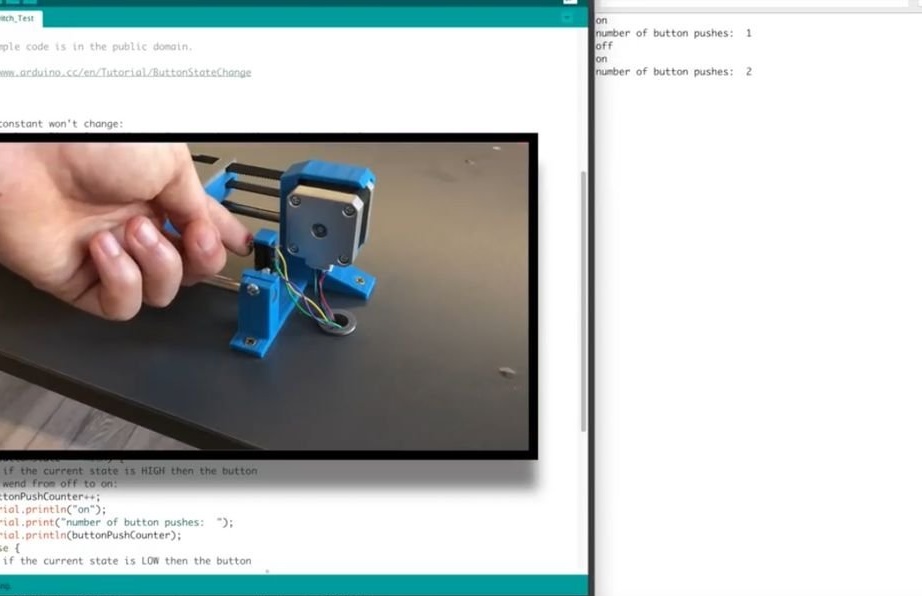
สคริปต์สำหรับดาวน์โหลดต่อไปนี้คือ "Contact_switch_test" ทันทีที่มีการโหลดการกดสวิตช์ จำกัด แต่ละครั้งจะปรากฏขึ้นบนจอภาพ

ขั้นตอนที่สิบสี่: การเชื่อมต่อมอเตอร์ X และ Z
ยึดตัวเชื่อมต่อที่มาจากเครื่องยนต์ X ผ่านเขียงหั่นขนมบนโต๊ะ เชื่อมต่อกับสายไฟคนขับ
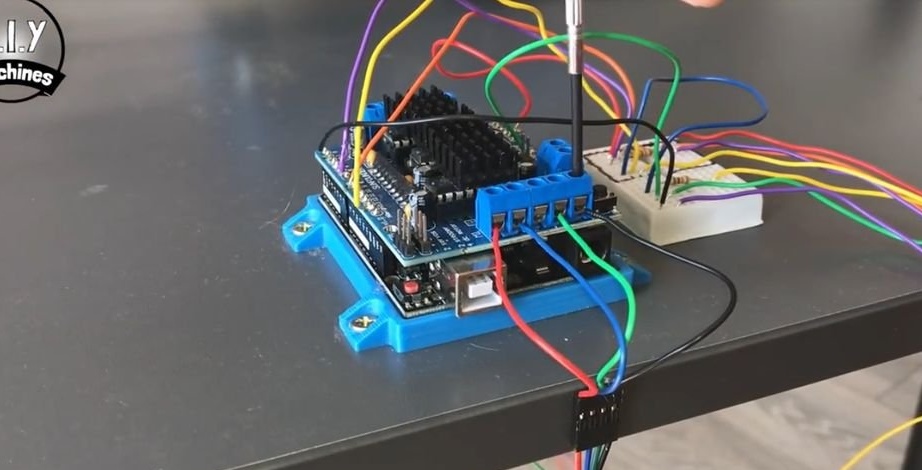
เชื่อมต่อสเต็ปเปอร์มอเตอร์แกน Z
ขั้นตอนที่สิบห้า: ช่องใส่แบตเตอรี่
ลบจัมเปอร์บนโมดูล เชื่อมต่อช่องใส่แบตเตอรี่
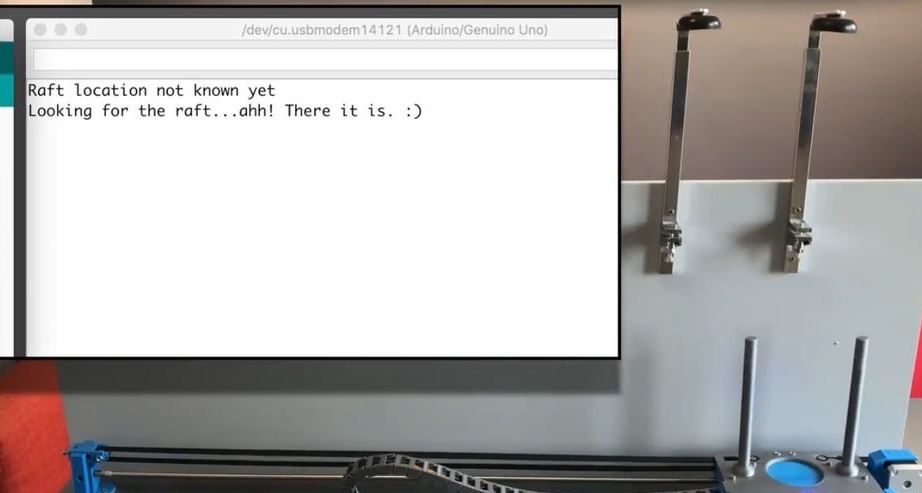
ตอนนี้คุณสามารถรัน "ทดสอบ 1" ไฟ LED สีแดงควรติดสว่างและแพลตฟอร์มควรถึงสวิตช์ จำกัด จากนั้น LED จะเปลี่ยนเป็นสีเขียว
ขั้นตอนที่สิบหก: ผู้ถือขวด
การใช้ตัวยึดยึดผนังด้านหลังของ MDF




ย้ายแพลตฟอร์มอีก 1 ซม. จากสวิทช์ จำกัด จัดวางที่วางแก้วและยึดที่วางขวดกับที่จ่าย (โชคไม่ดีที่อาจารย์ไม่ได้ให้รายละเอียดสำหรับการผลิตหรือการซื้อของที่ใส่) ถัดไป ผู้ถือที่แนบมาทุก 12 ซม.



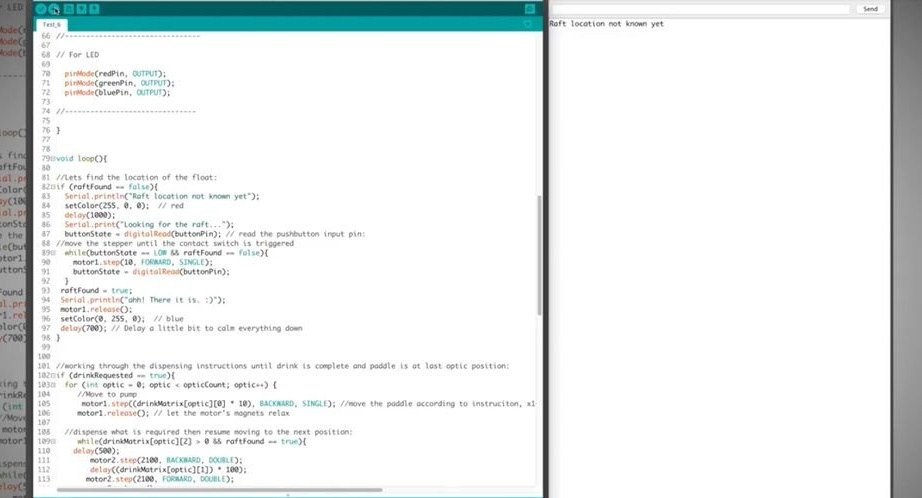
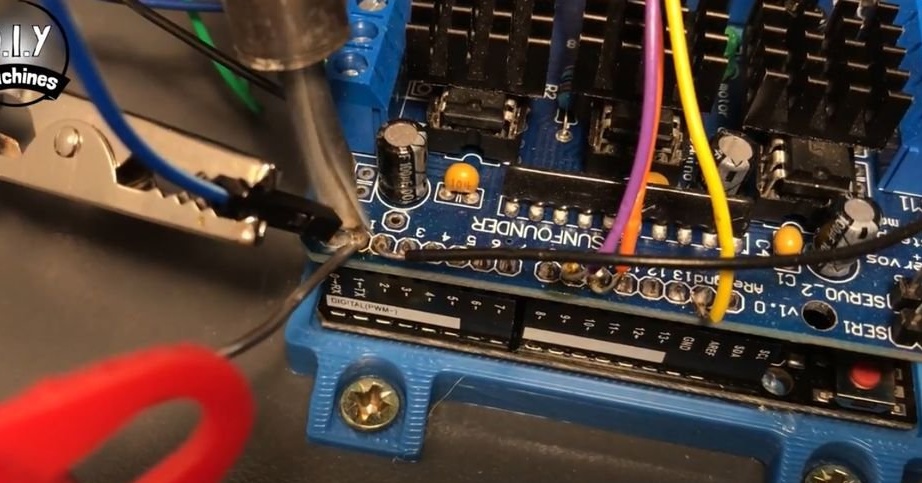
ขั้นตอนที่สิบเจ็ด: รหัสการสอบเทียบการทดสอบ
โหลดรหัสหลักที่ https://www.thingiverse.com/thing:2478890
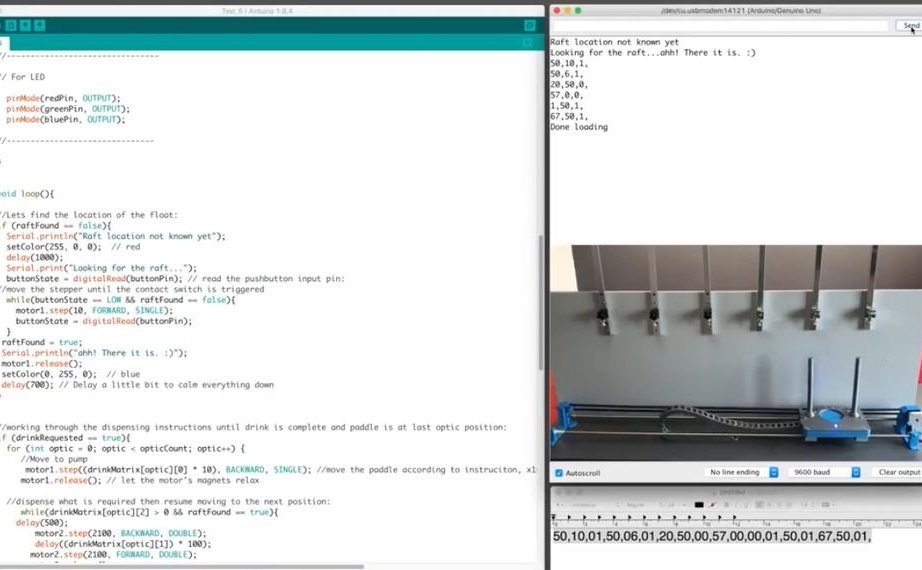
ในการตั้งค่าจะตั้งค่าต่อไปนี้: 50,10,01,50,06,01,50,50,50,00,57,00,00,00,50,50,50,50,02,50,50,50,50,50 ต้นแบบมีตู้จ่ายหกตู้ ในการตั้งค่ามีหกกลุ่มจากสามกลุ่มโดยที่ตัวเลขตัวแรกคือระยะห่างจากลิมิตสวิตช์ตู้แรกตู้กดที่สองเป็นต้นตัวเลขที่สองคือเวลาที่เทเครื่องดื่มลงในแก้วที่สามคือจำนวนเท ค่าเหล่านี้ทั้งหมดสามารถเปลี่ยนแปลงได้ตามต้องการ


เครื่องดื่มครั้งแรกที่อุปกรณ์เตรียมไว้คือจินและโคล่า เพื่อให้ความดันในขวดเท่ากันด้วยโคล่าคุณต้องทำหลุม จากนั้นตัวช่วยสร้างตั้งค่าพารามิเตอร์ที่จำเป็น



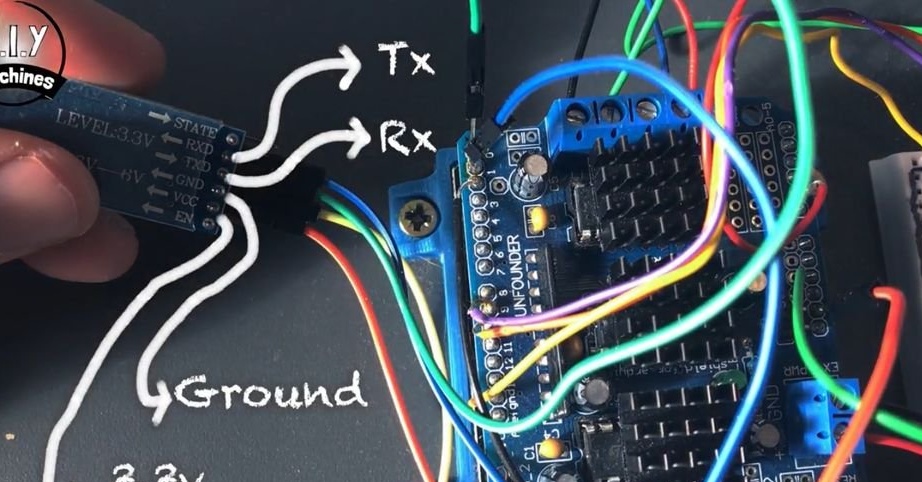
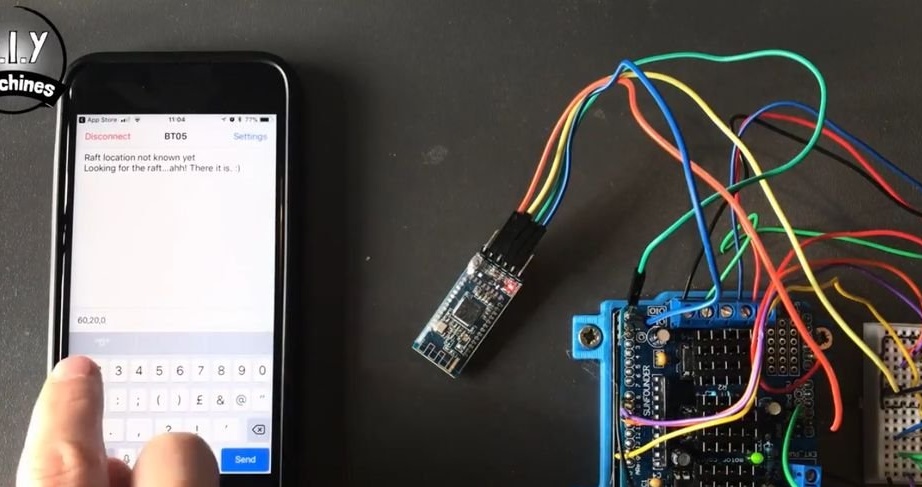
ขั้นตอนที่สิบแปด: โมดูลบลูทู ธ
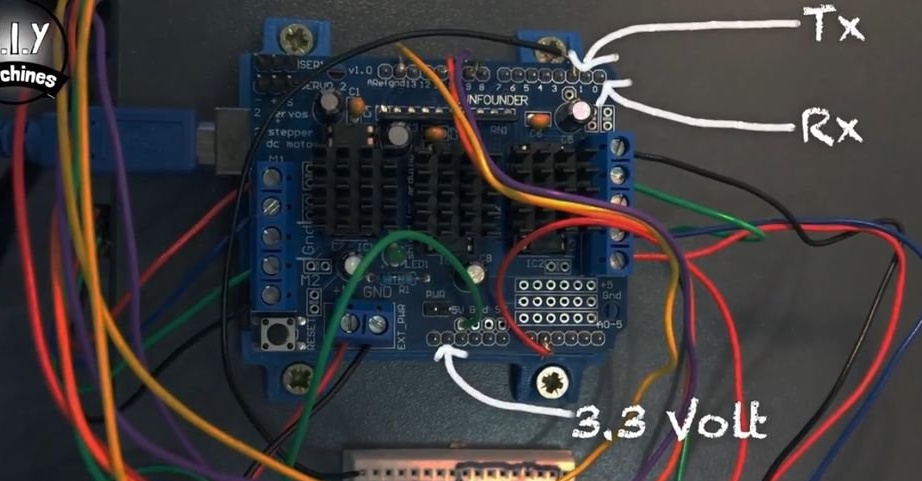
ในการควบคุมบาร์เทนเดอร์จากแกดเจ็ตเจ้านายจะติดตั้งโมดูลบลูทู ธ โมดูลเชื่อมต่อดังนี้
HM10 -> Arduino Shield
RXD ------> TX
TXD -------> RX
GND ------> กราวด์
VCC ------> 3.3V

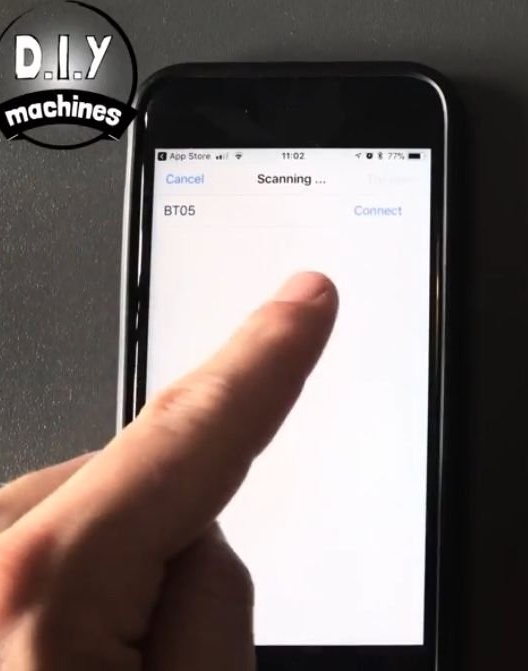
ต้นแบบมีสมาร์ทโฟนที่ใช้ iOS สำหรับระบบนี้เขาดาวน์โหลด“ hm10 bluetooth serial lite” จากแอพพลิเคชั่น จากนั้นจะสร้างการเชื่อมต่อและเข้าสู่การตั้งค่า

ทุกอย่างพร้อมแล้วและมีข้อมูลวิดีโอที่ครบถ้วนมากกว่านี้