


ในวงกลมของผู้สร้างจรวดสำหรับโหนดนี้มันเป็นธรรมเนียมที่จะใช้คำว่า avionics - avionics ฉันไม่เข้าใจจริงๆว่าทำไม ในกรณีส่วนใหญ่ที่ท่วมท้นโหนดจะรับผิดชอบเฉพาะในการกระตุ้นระบบช่วยเหลือถ้ามันเย็นลงการลงทะเบียนข้อมูลเที่ยวบินและการบันทึกวิดีโอ แต่แนวคิดของ avionics มีคำจำกัดความที่ชัดเจน: "กองทัพอากาศได้พัฒนาอุปกรณ์อากาศยาน (อากาศยาน) เป็น avionics (AEC) ที่ชัดเจนสำหรับการทำงานที่ปล่อยออกมาและ / หรือรับคลื่นวิทยุและอุปกรณ์การบิน (AO) ระบบ AO ส่วนใหญ่ยังมี อิเล็กทรอนิกส์ ส่วนประกอบและส่วนประกอบ แต่อย่าใช้คลื่นวิทยุในระหว่างการทำงาน "
จากคำจำกัดความเหล่านี้มันจะมีเหตุผลมากกว่าที่จะใช้คำว่าอุปกรณ์การบินหรือ avionics แต่ avionics เพื่อ avionics
จากคำจำกัดความเหล่านี้มันจะมีเหตุผลมากกว่าที่จะใช้คำว่าอุปกรณ์การบินหรือ avionics แต่ avionics เพื่อ avionics
มีหลากหลายรูปแบบและวิธีแก้ปัญหาสำหรับงานนี้: ตัวนับซึ่งเป็นร่มชูชีพพุ่งออกมาหลังจากเวลาที่กำหนดซึ่งคำนวณก่อนเที่ยวบิน แต่เนื่องจากความจริงที่ว่าเราอาศัยอยู่ในสังคมและเวลาที่ทุกคนมีเทคโนโลยีดิจิตอลที่ซับซ้อนมีการใช้วงจรอัจฉริยะที่สามารถวัดความสูงได้อย่างกว้างขวาง รูปแบบดังกล่าวถูกสร้างขึ้นบนพื้นฐานของเครื่องวัดความสูง (เครื่องวัดความสูง) มันยังเป็นเซ็นเซอร์ความดันบรรยากาศ อย่างที่ฉันคิดว่าทุกคนรู้ว่าความกดอากาศในบรรยากาศนั้นแตกต่างกันไปตามระดับความสูง นั่นคือเหตุผลที่ว่าทำไมภูเขาถึงมีจุดเดือดต่ำกว่าและสมาชิกคณะสำรวจอาจประสบกับภาวะขาดออกซิเจน ภายใต้สภาพความเป็นอยู่ทั่วไปคนไม่สามารถจับความแตกต่างของความดันบรรยากาศอุปกรณ์เหล่านี้ยังสามารถบันทึกการเปลี่ยนแปลงในระยะ 10 เซนติเมตร!
มันเป็นหนึ่งในอุปกรณ์เหล่านี้ที่ฉันต้องการจะอธิบายในวันนี้ ฉันขอสารภาพว่าแผนการนั้นไม่ใช่ของฉัน ผู้เขียนอุปกรณ์คือ Boris Duro ผู้สร้างจรวดชาวฝรั่งเศส (ฉันหวังว่าจะแปลเป็นภาษารัสเซียได้อย่างถูกต้อง)
นี่คืออุปกรณ์“ อายุน้อยที่สุด” ที่เสนอโดย Boris แต่ก็มีฟังก์ชั่นการทำงานที่เพียงพอสำหรับการเริ่มต้นที่ประสบความสำเร็จ ก่อนอื่นมาทำงานของเขา หลังจากเปิดสวิตช์อุปกรณ์จะถูกแนบเข้ากับภูมิประเทศตรวจสอบความสมบูรณ์ของฟิวส์และส่งสัญญาณ: ระยะสั้นต่อเนื่อง - ตามลำดับระยะยาวเสียหาย สัญญาณจะดังขึ้นก่อนที่จะทำการบินโดยไม่คำนึงถึงความสามารถในการซ่อมบำรุง / การทำงานผิดพลาดของฟิวส์หลังจากการบินขึ้นวงจรจะเริ่มวัดระดับความสูงการบินขึ้น - ลงถือว่าอยู่ในระดับความสูงมากกว่า 20 เมตรเมื่อมาถึงจุดสูงสุดอุปกรณ์จะเปิดใช้งานฟิวส์และใช้รหัสง่าย ๆ หมุนความสูงของจุดสูงสุดในวงกลมอย่างต่อเนื่อง ดูเหมือนว่านี่: สัญญาณยาว - 100 เมตร, สั้น 10 เมตร นั่นคือสมมติว่าอุปกรณ์ส่งสัญญาณยาว 5 และ 3 สั้นซึ่งหมายถึงความสูง apogee คือ 530 เมตร "ข้อความ" นี้กำลังหมุนจนกว่าอุปกรณ์จะปิด ข้อมูลไม่ได้ถูกเก็บไว้ในหน่วยความจำและหลังจากเปิดสวิตช์แล้ววงจรทั้งหมดจะเริ่มต้นใหม่อีกครั้ง ใช่อุปกรณ์นี้ไม่ได้บันทึกข้อมูลเที่ยวบินเหมือนกับหลาย ๆ แอนะล็อก แต่สำหรับเที่ยวบินแรกนี่เป็นตัวเลือกที่เหมาะสมกว่า นอกจากนี้วงจรที่ทำจากส่วนประกอบภาพถ่ายมีขนาดเล็กจนง่ายต่อการติดตั้งแม้ในจรวดเด็กที่เล็กที่สุด
นี่คืออุปกรณ์“ อายุน้อยที่สุด” ที่เสนอโดย Boris แต่ก็มีฟังก์ชั่นการทำงานที่เพียงพอสำหรับการเริ่มต้นที่ประสบความสำเร็จ ก่อนอื่นมาทำงานของเขา หลังจากเปิดสวิตช์อุปกรณ์จะถูกแนบเข้ากับภูมิประเทศตรวจสอบความสมบูรณ์ของฟิวส์และส่งสัญญาณ: ระยะสั้นต่อเนื่อง - ตามลำดับระยะยาวเสียหาย สัญญาณจะดังขึ้นก่อนที่จะทำการบินโดยไม่คำนึงถึงความสามารถในการซ่อมบำรุง / การทำงานผิดพลาดของฟิวส์หลังจากการบินขึ้นวงจรจะเริ่มวัดระดับความสูงการบินขึ้น - ลงถือว่าอยู่ในระดับความสูงมากกว่า 20 เมตรเมื่อมาถึงจุดสูงสุดอุปกรณ์จะเปิดใช้งานฟิวส์และใช้รหัสง่าย ๆ หมุนความสูงของจุดสูงสุดในวงกลมอย่างต่อเนื่อง ดูเหมือนว่านี่: สัญญาณยาว - 100 เมตร, สั้น 10 เมตร นั่นคือสมมติว่าอุปกรณ์ส่งสัญญาณยาว 5 และ 3 สั้นซึ่งหมายถึงความสูง apogee คือ 530 เมตร "ข้อความ" นี้กำลังหมุนจนกว่าอุปกรณ์จะปิด ข้อมูลไม่ได้ถูกเก็บไว้ในหน่วยความจำและหลังจากเปิดสวิตช์แล้ววงจรทั้งหมดจะเริ่มต้นใหม่อีกครั้ง ใช่อุปกรณ์นี้ไม่ได้บันทึกข้อมูลเที่ยวบินเหมือนกับหลาย ๆ แอนะล็อก แต่สำหรับเที่ยวบินแรกนี่เป็นตัวเลือกที่เหมาะสมกว่า นอกจากนี้วงจรที่ทำจากส่วนประกอบภาพถ่ายมีขนาดเล็กจนง่ายต่อการติดตั้งแม้ในจรวดเด็กที่เล็กที่สุด
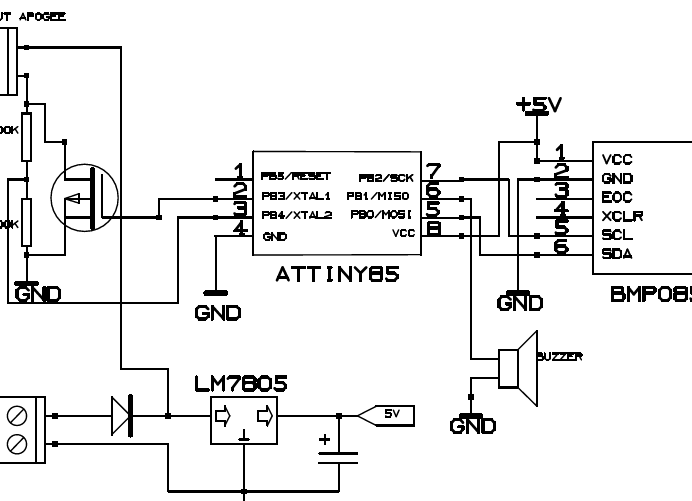
ด้านบนคุณสามารถสังเกตแผนภาพวงจรของอุปกรณ์ โครงการนี้นำมาจากที่ตั้งของ Boris แต่มันก็คุ้มที่จะสังเกตว่ามันมีสิ่งหนึ่งที่สามารถทำให้เข้าใจผิด แผนภาพแสดงการกำหนดกราฟิกของทรานซิสเตอร์เอฟเฟกต์สนาม p-channel เมื่อจริง ๆ แล้วใช้ n-channel ทรานซิสเตอร์ตัวไหนที่ไม่จำเป็นต้องใช้ n-channel สูงในปัจจุบัน
สำหรับการผลิตคุณจะต้อง:
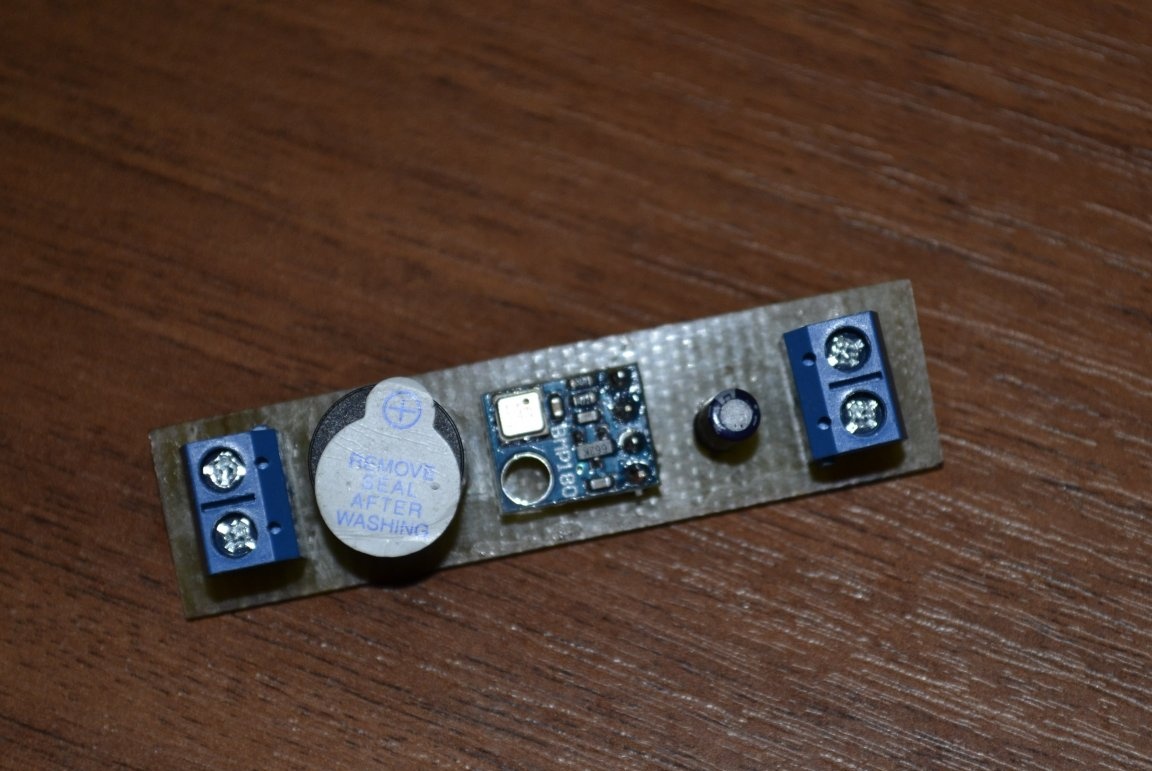
- BMP180 โมดูลบารอมิเตอร์
- Attiny 85 ไมโครคอนโทรลเลอร์
- ตัวเก็บประจุด้วยไฟฟ้า 47 mF, 16 V
- ตัวต้านทาน 100 kΩและ 2 kΩ
- ตัวสร้างเสถียรภาพ 78L05 ในตัวเรือน TO92 หรือเทียบเท่าใน SMD
- ทรานซิสเตอร์สนามผลสูงในปัจจุบัน IRF540 / IRFZ44 หรือเทียบเท่าในรุ่น SMD
- แผ่นสำหรับสายไฟ 2 ชิ้น
- ออดใช้งาน 5 V
- ไดโอด 1N4001 หรือ 1N4007 อีกทางเลือกหนึ่งคือการป้องกันการแซง
- textolite
จากเครื่องมือ:
- หัวแร้ง
- แหนบ
- ใบมีดด้านข้าง
- ประสาน
- ฟลักซ์
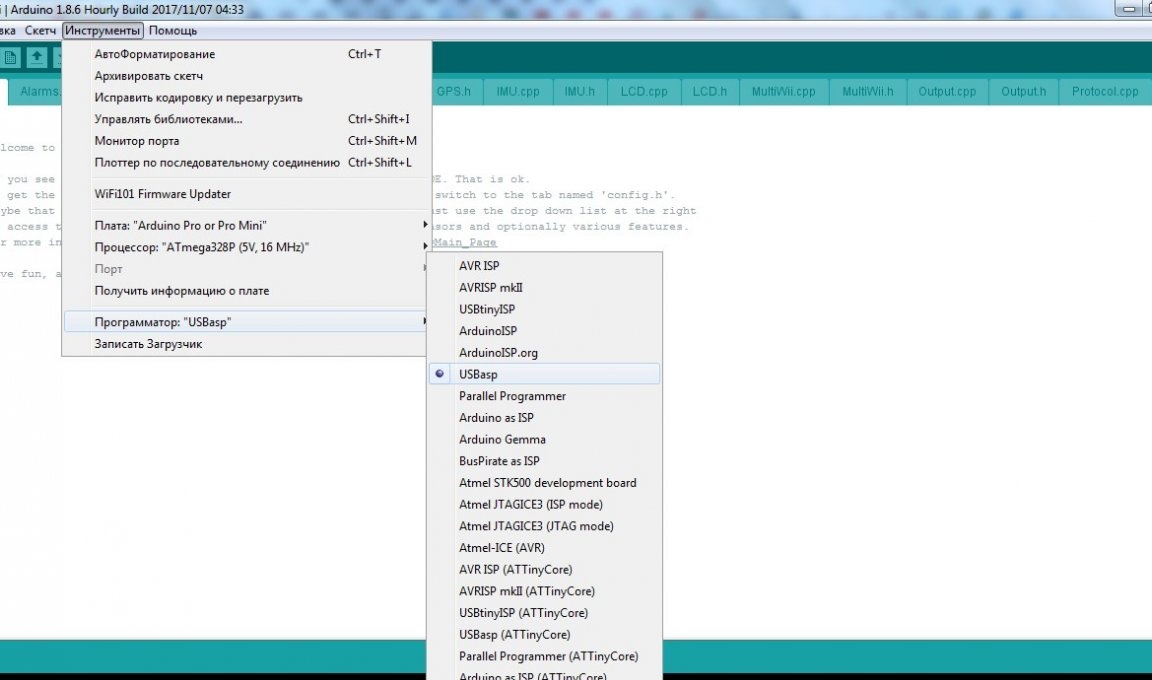
- โปรแกรมเมอร์ USBasp
ในไฟล์เก็บถาวรด้านล่างนี้เป็นไฟล์สองไฟล์ของแผงวงจรสำหรับส่วนประกอบ SMD และสำหรับการเดินสายเอาต์พุตทั่วไป ฉันต้องบอกทันทีว่าฉันไม่ได้รวบรวมบอร์ดที่สองฉันทำมันใน SMD แต่สำหรับผู้ที่ด้วยเหตุผลบางอย่างไม่สามารถประสานส่วนประกอบภาพถ่ายขนาดเล็กได้ฉันก็ทำการติดตามสำหรับส่วนประกอบทั่วไป อย่างไรก็ตามฉันตรวจสอบหลายครั้งควรปราศจากข้อผิดพลาด
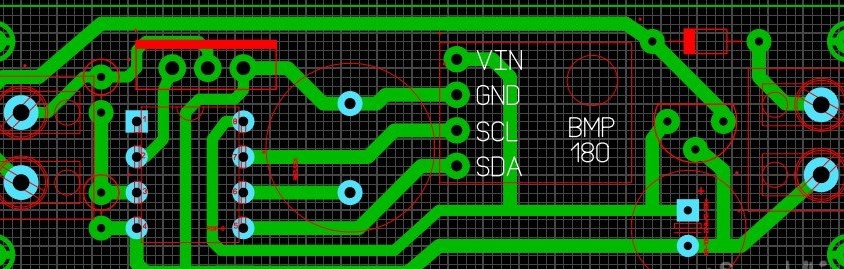
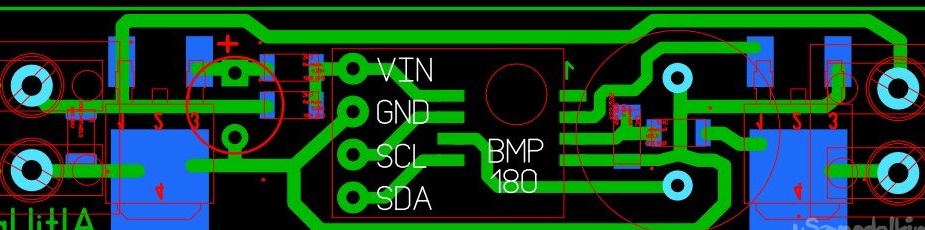
สิ่งแรกที่เราทำคือทำแผงวงจรพิมพ์ ฉันเหมือนปกติ LUT
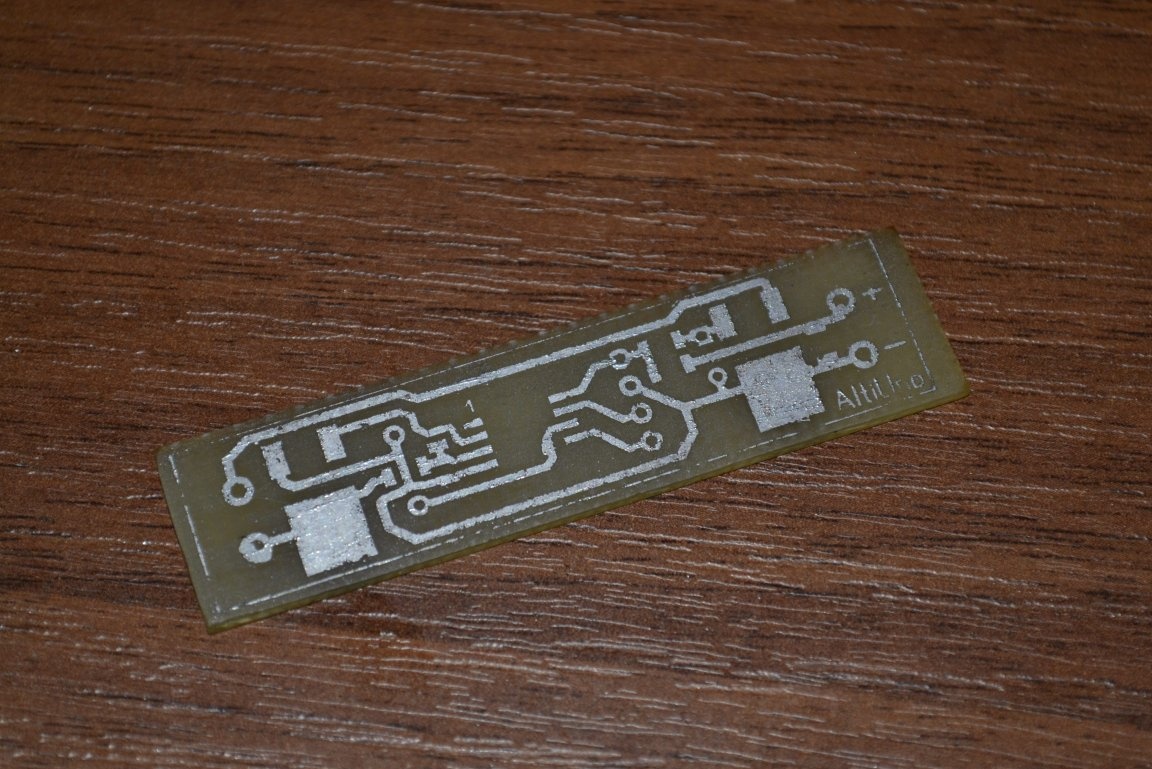
และประสานส่วนประกอบ SMD ทั้งหมดยกเว้นตัวควบคุม
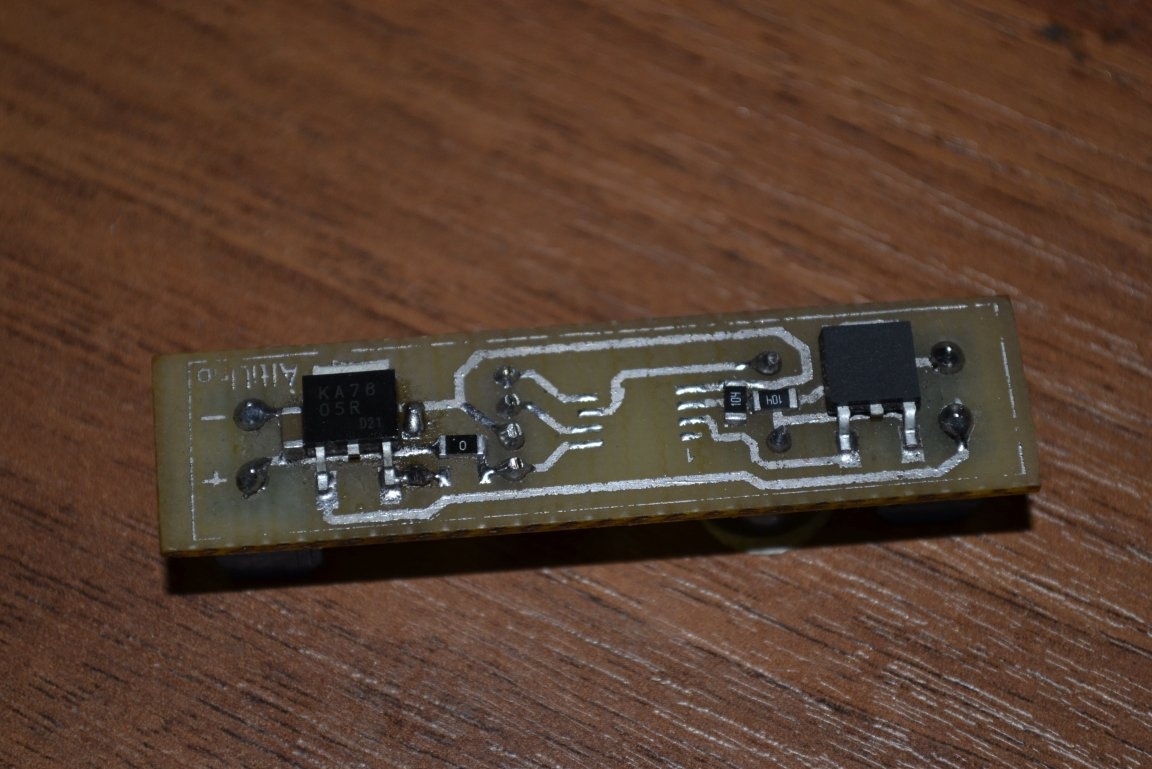
ถัดไปประสานเสียงกริ่งเซ็นเซอร์แผ่นและตัวเก็บประจุ
ตอนนี้คุณต้องแฟลชคอนโทรลเลอร์ เฟิร์มแวร์สำหรับวงจรนี้เขียนขึ้นในสภาพแวดล้อมของ Arduino ดังนั้นคุณต้องกรอกข้อมูลใน Arduino bootloader ลงในคอนโทรลเลอร์ สิ่งนี้ทำผ่านโปรแกรมเมอร์ USB ASP โดยตรงจากภายใต้สภาพแวดล้อมการเขียนโปรแกรม arduino เอง ก่อนอื่นคุณต้องเชื่อมต่อคอนโทรลเลอร์กับโปรแกรมเมอร์เอง แผนภาพการเชื่อมต่ออยู่ด้านล่าง

ในการเชื่อมต่อคอนโทรลเลอร์ในเวอร์ชัน SMD จำเป็นต้องใช้อะแดปเตอร์

ไฟล์ที่มีแผงวงจรพิมพ์จะอยู่ในที่เก็บถาวรในตอนท้ายของบทความด้วย ตอนนี้เราจะไปปรับปรุงซอฟต์แวร์ ก่อนอื่นคุณต้องรู้จักเพื่อน Arduino IDE ที่มี Attiny 85 เนื่องจากไม่รองรับคอนโทรลเลอร์นี้ ในการทำเช่นนี้ที่ ... / Arduino / hardware คุณต้องสร้างโฟลเดอร์เล็ก ๆ เพื่อวางเนื้อหาของไฟล์เก็บถาวรด้วยเมล็ด คุณสามารถดาวน์โหลดไฟล์เก็บถาวร ลิงค์นี้ดาวน์โหลดเวอร์ชันล่าสุด ตอนนี้สภาพแวดล้อมจะสามารถเห็นตัวควบคุม เราเชื่อมต่อโปรแกรมเมอร์เปิดสภาพแวดล้อมของ arduino ไปที่และใส่ USBasp
ตอนนี้เลือก ATtiny25 / 45/85
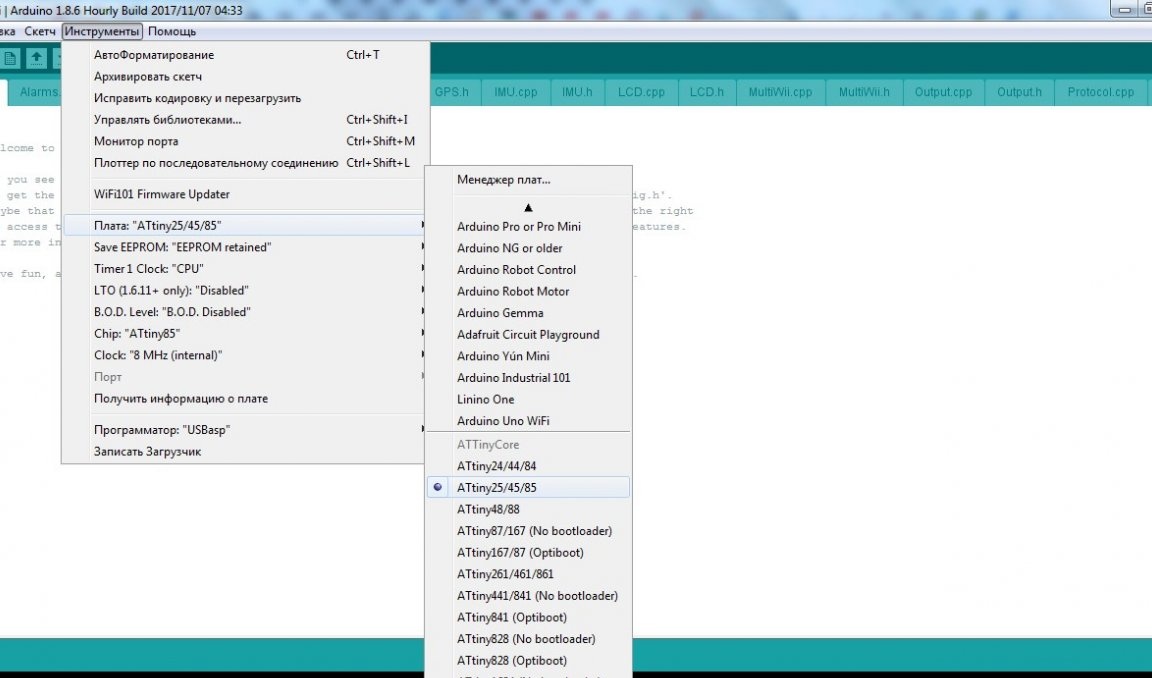
เรามองว่า ATtiny85 จะยืนอยู่ในชิป ตอนนี้ทั้งหมดในเครื่องมือเดียวกันคลิก หากทุกอย่างทำอย่างถูกต้องจะไม่มีปัญหากับผู้ติดต่อไม่มีปัญหากับไดรเวอร์จากนั้นสภาพแวดล้อมจะรายงานการบันทึกที่ประสบความสำเร็จ ข้อดีอย่างมากของเฟิร์มแวร์นี้คือคุณไม่จำเป็นต้องกังวลกับฟิวส์สภาพแวดล้อมของ Arduino จะทำทุกอย่างเอง ดังนั้นคุณจะไม่ฆ่าผู้ควบคุม หลังจากนั้นคุณสามารถกรอกร่าง ร่างนั้นมีลักษณะเกือบจะเหมือนกันตามปกติ แต่แทนที่จะต้องกดปุ่มปกติ นั่นคือทั้งหมดที่คุณสามารถประสานเข้ากับบอร์ดได้

ตอนนี้เรามาดูคุณสมบัติของแผงวงจรของฉันกัน ฉันทำช่อง avionics สำหรับการติดตั้งแบตเตอรี่ 18650 ในนั้นดังที่คุณทราบแบตเตอรี่ Li-ion แบบธนาคารเดียวที่ชาร์จเต็มแล้วจะผลิต 4.2 โวลต์ขีด จำกัด ล่างของแรงดันไฟฟ้าสำหรับ Attiny 85 คือ 2.7 โวลต์ซึ่งเป็นระดับการคายประจุที่สำคัญสำหรับแบตเตอรี่ดังกล่าวซึ่งก็คือพลังงานที่เพียงพอ แต่! เฉพาะในกรณีที่คุณใช้พลังงานโดยตรงผ่านทางโคลง ฉันไม่ได้เริ่มลบโคลงจากวงจรเพื่อให้เป็นสากลมากขึ้นแม้ว่ามันจะไม่เกี่ยวข้องกับฉัน บนบอร์ดมีห้าตัวสำหรับตัวต้านทานสองตัว
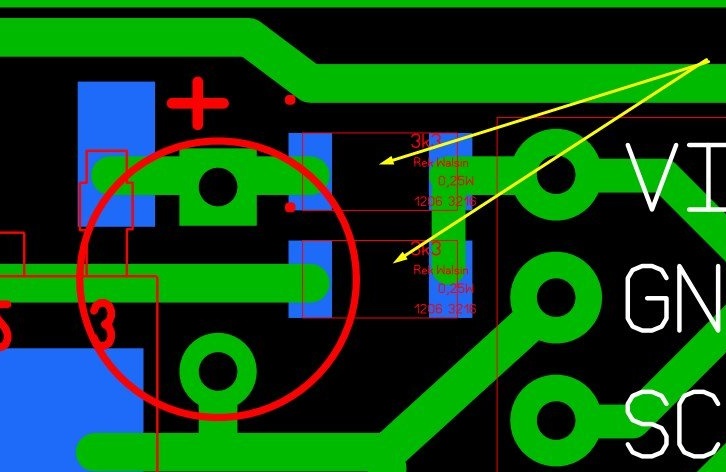
สิ่งเหล่านี้ไม่ใช่ตัวต้านทานจริงๆ สำหรับคู่ส้นเท้าเหล่านี้คุณจำเป็นต้องบัดกรีจัมเปอร์ความต้านทานเป็นศูนย์ที่เรียกว่า (คุณสามารถสายลวดอย่างโง่เขลา) ถ้าคุณชอบฉันจะป้อนวงจรจากแหล่งพลังงานดังกล่าวแล้วประสานไปยังผู้ติดต่อที่ต่ำกว่าถ้าคุณดูที่ภาพถ้าคุณตั้งใจจะใช้เช่นมงกุฎจากนั้นไปที่ด้านบนเพื่อออกจากโคลง บนแผงวงจรพิมพ์จริง ๆ แล้วทุกอย่างจะปรากฏขึ้นสิ่งที่กำลังจะเกิดขึ้น
บนบอร์ดสำหรับองค์ประกอบเอาต์พุตไม่มีตัวเลือกนี้ คุณสามารถทำตราไปรษณียากรด้วยตัวคุณเองเพิ่มตัวอย่างจัมเปอร์สองสามอันหรือเพียงแค่ไม่ประสานโคลงและจัมเปอร์ประสาน
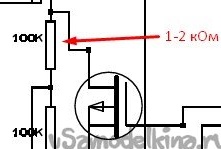
แตกต่างกันนิดหน่อย เมื่อขับเคลื่อนด้วยแบตเตอรี่ที่มีแรงดันไฟฟ้า 4.2 โวลต์อาจเกิดขึ้นได้ว่าทรานซิสเตอร์เปิดอย่างต่อเนื่อง อย่างที่คุณเห็นจากแผนภาพมีตัวแบ่งระหว่างท่อระบายน้ำกับแหล่งที่มา ในการแก้ปัญหาคุณต้องแทนที่ตัวต้านทานตัวใดตัวหนึ่งด้วย 1-2 kOhm ตัวไหนที่แสดงด้านล่าง
บนบอร์ดสำหรับองค์ประกอบเอาต์พุตไม่มีตัวเลือกนี้ คุณสามารถทำตราไปรษณียากรด้วยตัวคุณเองเพิ่มตัวอย่างจัมเปอร์สองสามอันหรือเพียงแค่ไม่ประสานโคลงและจัมเปอร์ประสาน
แตกต่างกันนิดหน่อย เมื่อขับเคลื่อนด้วยแบตเตอรี่ที่มีแรงดันไฟฟ้า 4.2 โวลต์อาจเกิดขึ้นได้ว่าทรานซิสเตอร์เปิดอย่างต่อเนื่อง อย่างที่คุณเห็นจากแผนภาพมีตัวแบ่งระหว่างท่อระบายน้ำกับแหล่งที่มา ในการแก้ปัญหาคุณต้องแทนที่ตัวต้านทานตัวใดตัวหนึ่งด้วย 1-2 kOhm ตัวไหนที่แสดงด้านล่าง
ตอนนี้สำหรับเฟิร์มแวร์ มี 2 เฟิร์มแวร์ในหน่วยเก็บถาวรหลักสำหรับเรียกฟิวส์ไฟฟ้าของระบบกู้ภัยและอีกทางเลือกหนึ่ง เฟิร์มแวร์สำรองช่วยให้คุณใช้วงจรเป็นสัญญาณค้นหาเสียง เนื่องจากวงจรมีขนาดเล็กมากจึงสามารถวางไว้ในหัวเครื่องบินของจรวดเลือกแหล่งพลังงานขนาดกะทัดรัด ในการทำเช่นนี้แทนที่จะเป็นฟิวส์อีซีแอล piezo ที่ทรงพลังจะเชื่อมต่อกับหน้าสัมผัสคล้ายกับที่แสดงด้านล่าง

บางคนจะบอกว่าทำไมบนกระดานมีกริ่ง ใช่ แต่ไม่ว่าคุณจะได้ยินเสียงดังแค่ไหนในระหว่างการทดสอบในห้องในความเป็นจริงคุณสามารถได้ยินเสียงที่เพดานประมาณ 20 เมตรในสนามโดยทั่วไปเครื่องมือค้นหาสำหรับแบบจำลองนั้นเป็นมหากาพย์ทั้งหมด ในแผนการในอนาคตฉันมีชุดสัญญาณ GPS ซึ่งจะกำหนดพิกัดและส่งสัญญาณไปบนอากาศ รับพิกัดในสถานีวิทยุแบบพกพา (เครื่องส่งรับวิทยุ) และใช้โทรศัพท์ทุกเครื่อง (ตอนนี้ทุกเครื่องมีเครื่องนำทาง GPS) รุ่นจะถูกค้นหา แต่มันอยู่ในแผนเราจะกลับสู่ความเป็นจริง
แม้ว่าโดยทั่วไปแล้วจะไม่มีอะไรพิเศษที่จะกลับไป แชสซีพิเศษถูกสร้างขึ้นมาสำหรับบอร์ดขอบคุณที่ติดตั้งในจรวด แชสซีทำขึ้นมาเพื่อคุณโดยเฉพาะ รูปแบบ. ฉันทำจากกิ๊บติดผมที่บางที่สุดที่ฉันสามารถหาซื้อได้ในร้านก่อสร้างและชิ้นส่วนของไฟเบอร์กลาสทำเอง
แม้ว่าโดยทั่วไปแล้วจะไม่มีอะไรพิเศษที่จะกลับไป แชสซีพิเศษถูกสร้างขึ้นมาสำหรับบอร์ดขอบคุณที่ติดตั้งในจรวด แชสซีทำขึ้นมาเพื่อคุณโดยเฉพาะ รูปแบบ. ฉันทำจากกิ๊บติดผมที่บางที่สุดที่ฉันสามารถหาซื้อได้ในร้านก่อสร้างและชิ้นส่วนของไฟเบอร์กลาสทำเอง

บอร์ดติดอยู่กับตัวเครื่องบนแถบยางเครื่องเขียนธรรมดา ติดตั้งง่ายและใช้งานได้ดีเหมือนกับโช้คอัพเพื่อให้เซ็นเซอร์ไม่ทำงาน
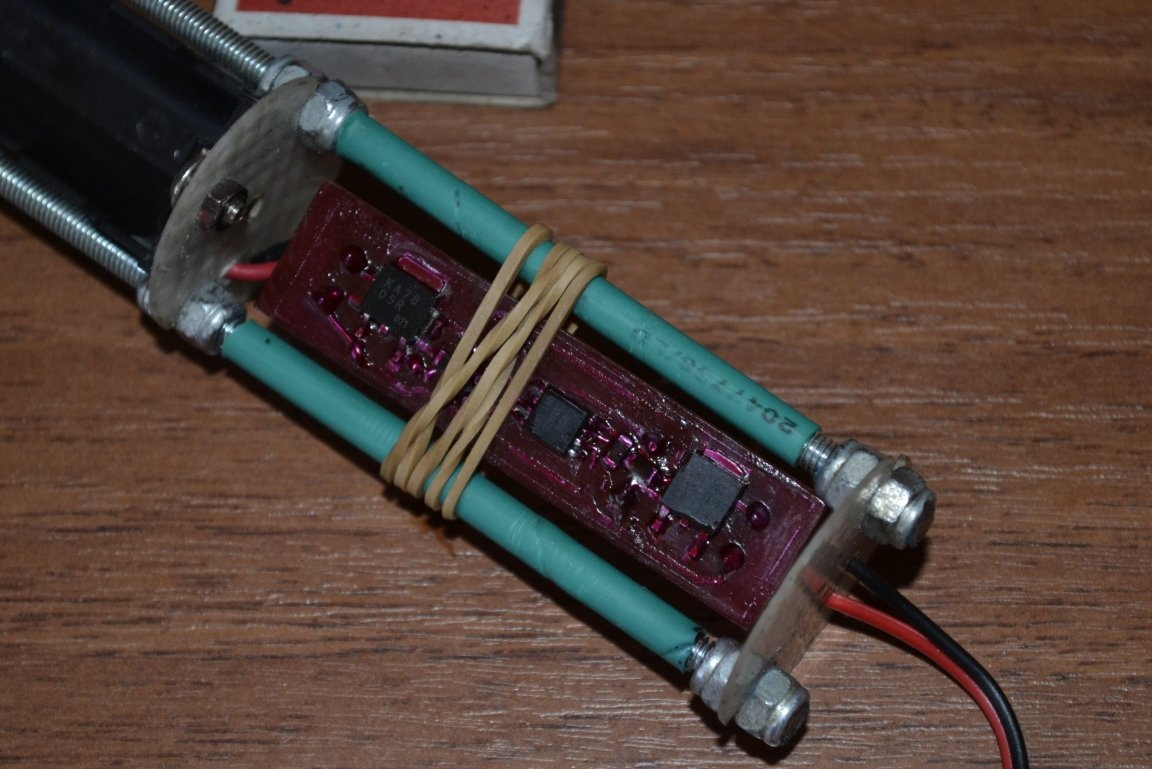
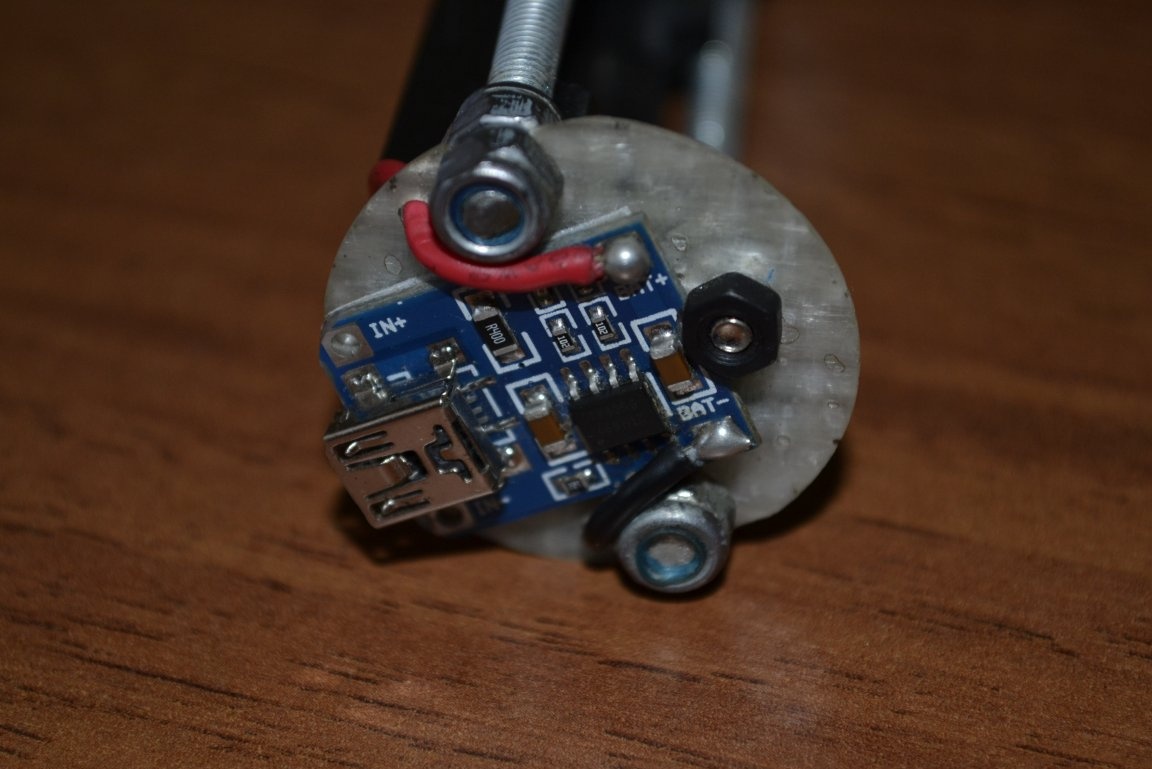
อย่างที่คุณเห็นบอร์ดจากด้านข้างของแทร็กที่ฉันวาด หดหู่ ยาทาเล็บเพื่อการปกป้องที่ดีกว่า จากจุดสิ้นสุดของแชสซีฉันตัดสินใจที่จะต่ออุปกรณ์ชาร์จหนึ่งครั้งที่ฉันซื้ออาลีมาสองสามโหลพวกมันมีราคาเหมือนเมล็ดดังนั้นมันจึงไม่น่าเสียดาย
คำไม่กี่คำเกี่ยวกับการยืนยัน เราใช้โอ่ง (เช่นวงจรที่มีกำลังพอดี) และฝาไนล่อน เราทำรูบนฝาและวางท่อจากหลอดหยดลงไปอย่างแน่นหนา ปลายอีกด้านหนึ่งของหลอดเชื่อมต่อกับเข็มฉีดยาของก้อน 20 เราใส่อุปกรณ์ในขวดปิดและปั๊มอากาศด้วยเข็มฉีดยา หลังจากที่เราจัดหาอากาศกลับมา
ตัวเลือกที่สอง ตามคำแนะนำของผู้สร้างแบบจำลองที่คุ้นเคย เราใช้หลอดจากอมยิ้มแท่งของแท่งปากกาแท่งหู ในตอนท้ายเราจะพันเทปไฟฟ้าหลายชั้นเพื่อให้เทปไฟฟ้ายาวเกินกว่าสองสามมิลลิเมตร อย่างระมัดระวังด้วยมีดที่คมชัดตัดขอบของหลอดแผลซึ่งจะเท่ากัน เราใช้มันอย่างสม่ำเสมอกับรูบนตัวเซ็นเซอร์และดึงอากาศออกมาด้วยปากของเรา ดั่งดั้งเดิม แต่ก็ใช้ได้ผล
ตัวเลือกที่สอง ตามคำแนะนำของผู้สร้างแบบจำลองที่คุ้นเคย เราใช้หลอดจากอมยิ้มแท่งของแท่งปากกาแท่งหู ในตอนท้ายเราจะพันเทปไฟฟ้าหลายชั้นเพื่อให้เทปไฟฟ้ายาวเกินกว่าสองสามมิลลิเมตร อย่างระมัดระวังด้วยมีดที่คมชัดตัดขอบของหลอดแผลซึ่งจะเท่ากัน เราใช้มันอย่างสม่ำเสมอกับรูบนตัวเซ็นเซอร์และดึงอากาศออกมาด้วยปากของเรา ดั่งดั้งเดิม แต่ก็ใช้ได้ผล
และคำสองสามคำสำหรับผู้ที่มีคำถามว่าไคลแม็กซ์เป็นอย่างไร ในอุปกรณ์ดังกล่าวทั้งหมดสิ่งนี้จะถูกนำไปใช้ในลักษณะเดียวกัน เมื่อบินระดับความสูงปัจจุบันจะถูกเปรียบเทียบอย่างต่อเนื่องกับระดับก่อนหน้า ทันทีที่ค่านี้เริ่มลดลงต่ำกว่าค่าก่อนหน้า (จรวดเริ่มลดลง) มันจะถูกกำหนดโดย apogee แต่เพื่อไม่ให้มีผลบวกปลอม apogee ถูกพิจารณาว่าเป็นจรวดที่ตกถึงระดับที่สูงโดยปกติจะลดลง 3 เมตร (นี่เป็นรหัสที่ถูกต้อง) แต่สำหรับขีปนาวุธที่บินได้สูงกว่านั้น
ไฟล์ที่จำเป็นทั้งหมดสามารถดาวน์โหลดได้จาก
นั่นคือทั้งหมดที่ วิดีโอพร้อมตัวอย่างโปสเตอร์ด้านล่าง ประสบความสำเร็จในการทำงาน!