







แนวคิดหลักของโครงการนี้คือด้วยความช่วยเหลือของคลื่นสมองต่าง ๆ ผู้ใช้จะสามารถควบคุมหุ่นยนต์เคอร์เซอร์บนพีซีของเขาหรือเปิด / ปิดไฟในบ้านของเขาในขณะที่ไมโครคอนโทรลเลอร์ (Particle Photon) สร้างการวิเคราะห์ออนไลน์ของคลื่นสมองของผู้ใช้ ใช่แล้วด้วยอุปกรณ์นี้คุณสามารถใช้พลังแห่งความคิดได้จริงๆ
 ... อุปกรณ์นี้ไม่ได้มีไว้สำหรับขี้เกียจหรือแฟนเท่านั้นมันถูกสร้างขึ้นเพื่อให้โอกาสผู้คน ที่ต่อสู้ทุกวันด้วยความพิการ หุ่นยนต์พัฒนาโดยผู้เขียนทำงานเหมือนกับระบบรถเข็น บ้าน ระบบอัตโนมัติจะช่วยให้ผู้ใช้ควบคุมแสงหรือโทรทัศน์แม้ว่าเขา / เธอไม่สามารถย้าย โหมดคอนโทรลเลอร์ PC นั้นมีประโยชน์แม้กับคนที่มีสุขภาพสมบูรณ์
... อุปกรณ์นี้ไม่ได้มีไว้สำหรับขี้เกียจหรือแฟนเท่านั้นมันถูกสร้างขึ้นเพื่อให้โอกาสผู้คน ที่ต่อสู้ทุกวันด้วยความพิการ หุ่นยนต์พัฒนาโดยผู้เขียนทำงานเหมือนกับระบบรถเข็น บ้าน ระบบอัตโนมัติจะช่วยให้ผู้ใช้ควบคุมแสงหรือโทรทัศน์แม้ว่าเขา / เธอไม่สามารถย้าย โหมดคอนโทรลเลอร์ PC นั้นมีประโยชน์แม้กับคนที่มีสุขภาพสมบูรณ์ มันทำงานยังไง?
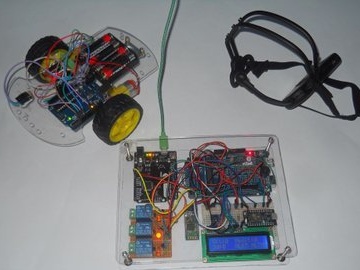

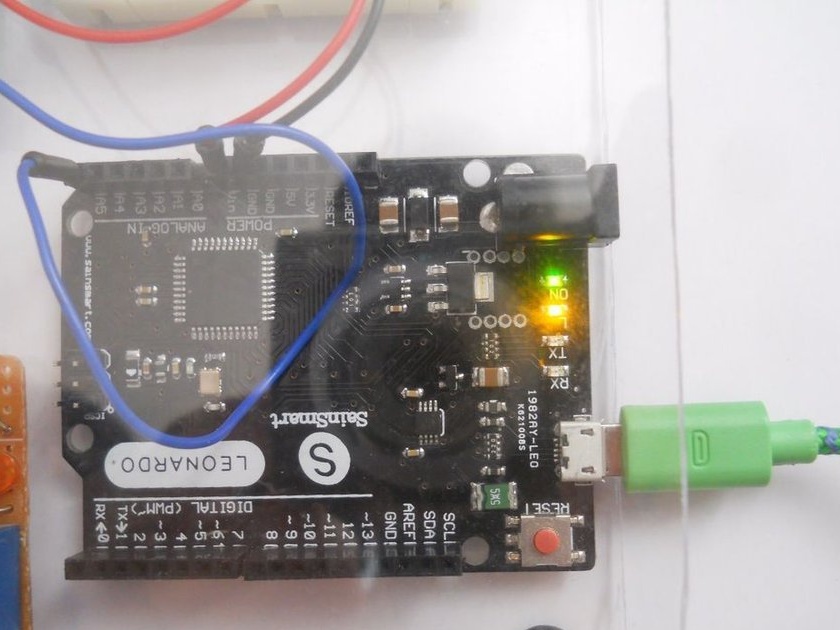
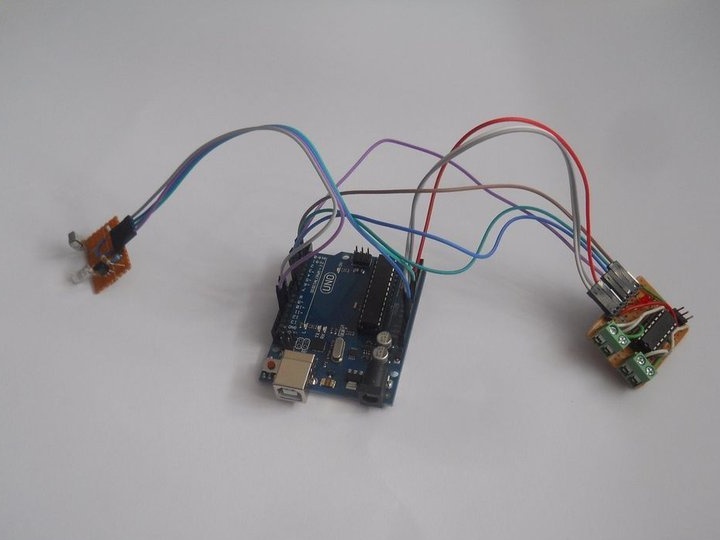
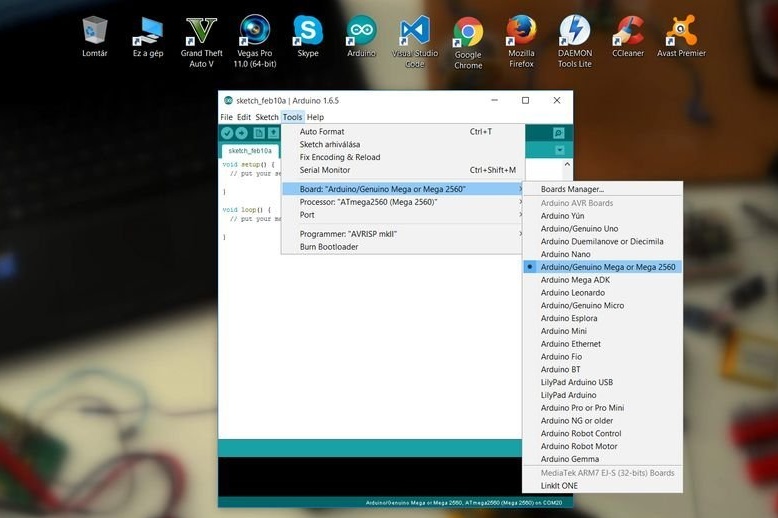
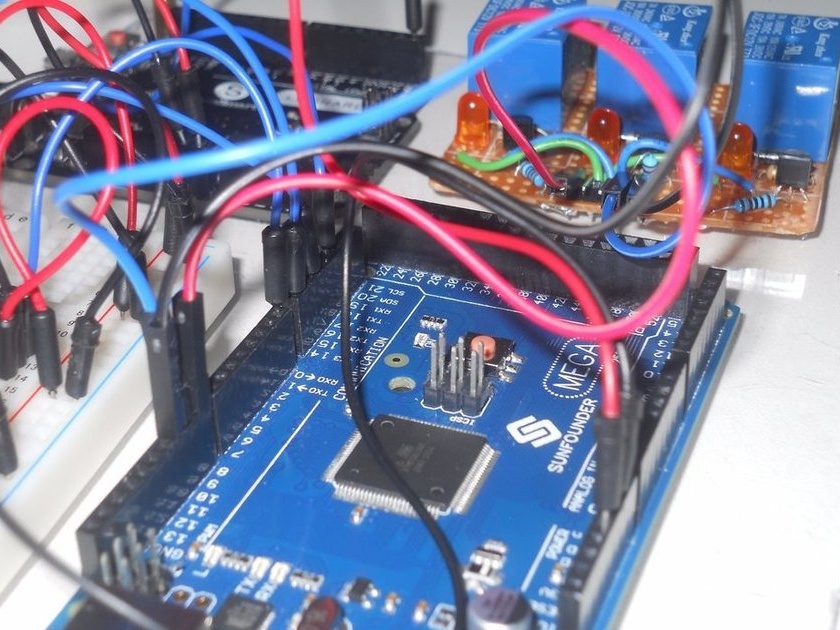
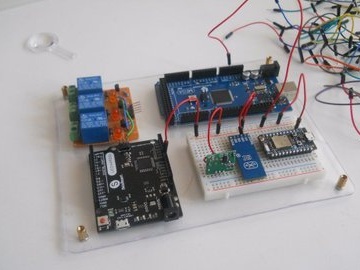
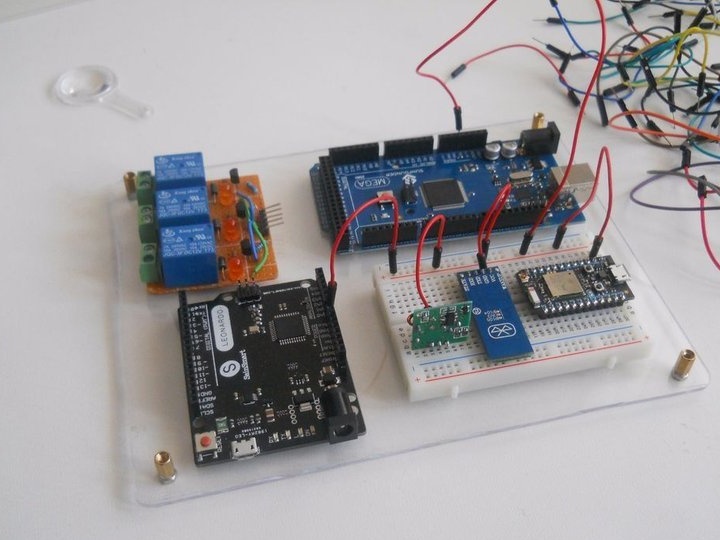
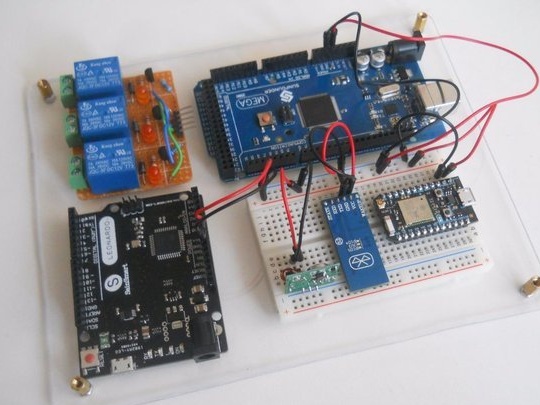
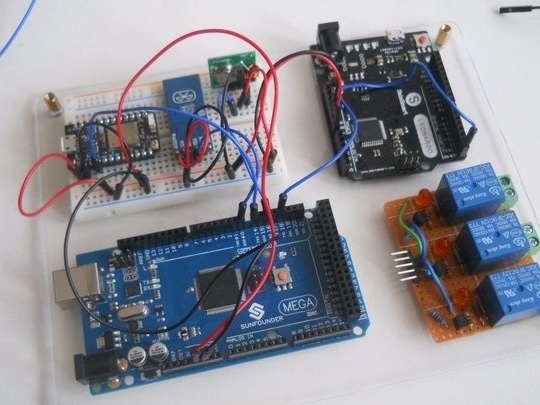
ไมโครคอนโทรลเลอร์สี่ตัวถูกนำมาใช้เพื่อทำให้โครงการนี้มีชีวิต: Arduino Mega, Arduino Leonardo, UNO และ Parton Photon Mega เป็นสมองของโครงการที่รับสัญญาณจากชุดหูฟังวิเคราะห์และส่งคำสั่งไปยังอุปกรณ์อื่น ๆ ส่งผ่านข้อมูลทั้งหมดไปยัง Particle Photon ซึ่งสร้างเว็บเซิร์ฟเวอร์ Leonardo ควบคุมเมาส์บนพีซีและใช้ Uno เพื่อรับ IR (สัญญาณอินฟราเรด) และควบคุมหุ่นยนต์ อุปกรณ์สามารถควบคุมอุปกรณ์ได้สามแบบ (หรือมากกว่านั้นหากคุณต้องการตั้งโปรแกรมอย่างอื่น) นอกจากนี้อุปกรณ์ต่าง ๆ ทั้งสามนี้จะเรียกว่าแชนเนล อุปกรณ์สลับระหว่างช่องสัญญาณเหล่านี้หากคุณหลับตา:
หลับตาสัก 1-2 วินาที: สลับไปที่ฟังก์ชั่นการทำงานอัตโนมัติที่บ้าน
หลับตาสัก 2-4 วินาที: สลับไปที่โหมดควบคุมหุ่นยนต์
หลับตาเป็นเวลา 1-6 วินาที: สลับไปที่โหมดควบคุมเมาส์
ในการทำให้ฟังก์ชั่นการทำงานอัตโนมัติที่บ้านซึ่งคุณสามารถเชื่อมต่อได้ทุกอย่าง: ทีวีหลอดไฟซ็อกเก็ตทุกสิ่งที่คุณต้องการใช้รีเลย์
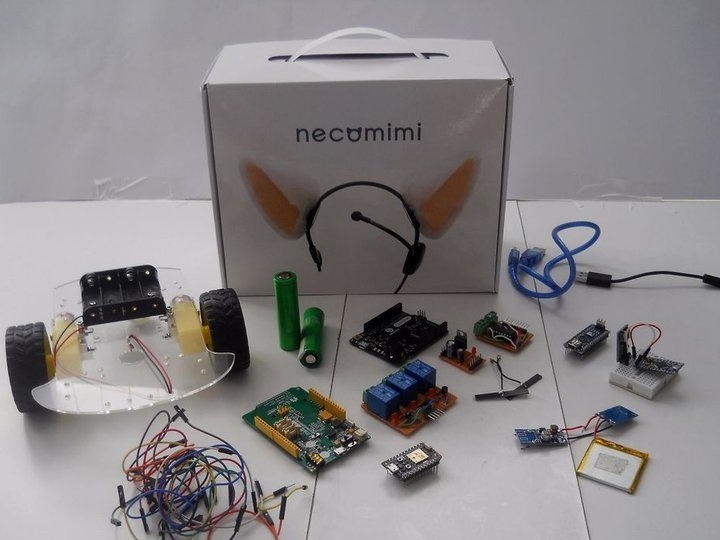
สำหรับการรับรู้ของคลื่นสมอง - Necomimi ซึ่งสามารถขยับหูของคุณขึ้นอยู่กับคลื่นสมองของคุณ (ความสนใจการทำสมาธิ) ภายในชิปขนาดเล็กที่อ่านคลื่นสมองกรองสัญญาณรบกวนและให้สัญญาณที่ดีมาก มันใช้งานได้กับส่วนต่อประสาน UART (Serial) ดังนั้นด้วยการแฮ็กเราสามารถใช้ Arduino เพื่ออ่านคลื่นสมองบทบาทของชุดหูฟังนี้คือการส่งคลื่นสมองไปยังเซิร์ฟเวอร์กลางแบบไร้สาย
หากคุณคุ้นเคยกับ โครงการก่อนหน้าจากนั้นคุณสามารถข้ามขั้นตอนการถอดแยกชิ้นส่วนและการเปลี่ยนแปลงของ Necomimi ได้
ลงไปเพื่อดูวิธีการถอดและทำหูฟังบลูทู ธ ไร้สายออกมา
ระบบควบคุมบ้านอัตโนมัติ
หากคุณสลับไปที่โหมดโฮมอัตโนมัติเพิ่มระดับความสนใจของคุณให้สูงกว่า 70 เพื่อเปิดรีเลย์แรกเพิ่มระดับการทำสมาธิของคุณสูงกว่า 70 เพื่อเปิดรีเลย์ที่สองของคุณและเพิ่มค่าทั้งสองสูงกว่า 70 เพื่อเปิดรีเลย์ที่สาม มันเป็นเรื่องยากเล็กน้อย แต่ไม่เป็นไปไม่ได้หลังจากฝึกฝนจิตใจ หากรีเลย์เปิดอยู่ให้ใช้คำสั่งเดียวกันเพื่อปิด (ถ้าเปิดอยู่ให้ถึง 70 เพื่อปิด) เมื่อระบบพร้อมใช้งานสามารถเชื่อมต่ออุปกรณ์ไฟฟ้าแรงสูง (แสง, ทีวี, คอมพิวเตอร์, พัดลม, อะไรก็ได้) เข้ากับโมดูลรีเลย์
การควบคุมเมาส์
เคอร์เซอร์ถูกควบคุมโดยอารมณ์ หากระดับความสนใจน้อยกว่า 25 ระดับจะเลื่อนไปทางซ้ายหากอยู่ระหว่าง 25 และ 50 จะเลื่อนไปทางขวาหากอยู่ระหว่าง 50 และ 75 จะสูงขึ้นและถ้าอยู่ระหว่าง 75 และ 100 จะลดลง คุณสามารถคลิกปุ่มเม้าส์ได้โดยเพิ่มระดับการทำสมาธิ แน่นอนคุณต้องฝึกให้ดี
การควบคุมหุ่นยนต์
หุ่นยนต์มีสามทีมเท่านั้น: หยุดเลี้ยวซ้ายและเดินหน้าต่อไป ทำไมมีเพียงสองตัวเลือกการเคลื่อนไหว? เพราะสองทิศทางนี้เพียงพอที่จะเคลื่อนย้ายหุ่นยนต์ได้ทุกที่ ใช้ระดับการทำสมาธิของคุณเพื่อหมุนด้วยหุ่นยนต์และเมื่อคุณไปถึงทิศทางที่คุณต้องการเคลื่อนไหวหยุดหุ่นยนต์แล้วก้าวไปข้างหน้าด้วยระดับความสนใจ นี่เป็นวิธีที่ดีที่สุดในการควบคุมหุ่นยนต์และแม้แต่ผู้เริ่มต้นที่ไม่สามารถควบคุมค่าความสนใจ / การทำสมาธิเพื่อให้สามารถเล่นกับหุ่นยนต์นี้ได้ดี
ชุดหูฟังจะส่งสัญญาณ BT (Bluetooth) ไปยัง Arduino Mega ซึ่งจะทำการวิเคราะห์ไบต์ขาเข้าและขึ้นอยู่กับความคิดของผู้ใช้ควบคุมฟังก์ชั่นต่าง ๆ ตอนแรกผู้เขียนต้องการใช้ Particle Photon เป็นเครื่องส่งสัญญาณข้อมูล แต่โมดูลขนาดเล็กนี้มีบทบาทในการสร้างเว็บเซิร์ฟเวอร์ เป็นการเปลี่ยนแปลงครั้งใหญ่ที่สุดในโครงการทั้งหมด เขายังใช้โมดูล Arduino ทำเอง แต่คุณสามารถซื้อโมดูลเหล่านี้ออนไลน์
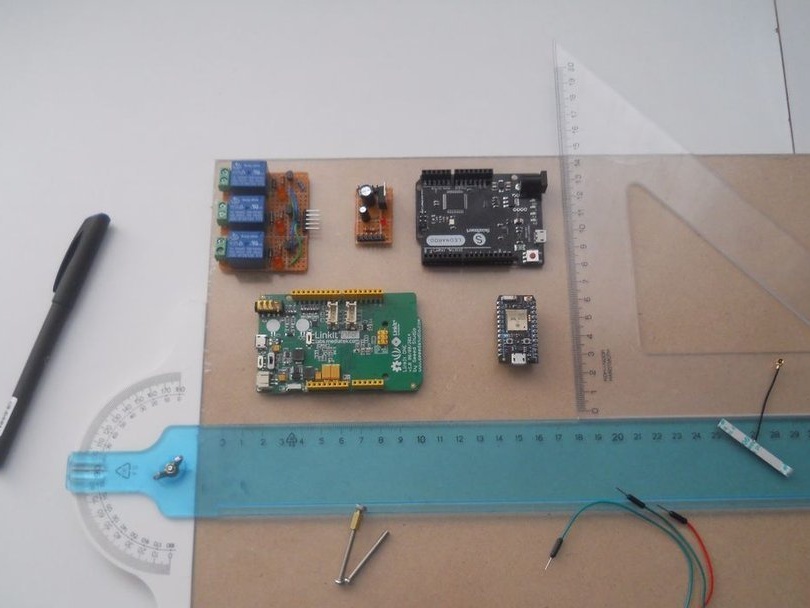
ชิ้นส่วนทั้งหมดมาจาก GearBest.com นี่คือร้านค้าออนไลน์เช่นเดียวกับ eBay แต่อะไหล่จะถูกจัดส่งเร็วขึ้นมาก (บางทีทั้งหมดนี้อยู่ใน aliexpress) ดังนั้นหากคุณต้องการสร้างตัวควบคุมเกมของคุณเอง, ตัวควบคุมหุ่นยนต์หรือ Force Detecto r ให้เริ่มจากการซื้อชิ้นส่วน






เครื่องมือที่ต้องการ:
หัวแร้ง
ประสาน
ปืนกาว
เทปกาวในตัว / เทปสองด้าน
เครื่องปอกสายไฟ
เครื่องตัดลวด
อุปกรณ์:
/ Arduino Nano
ซอฟแวร์:
แฮ็ค Necomimi







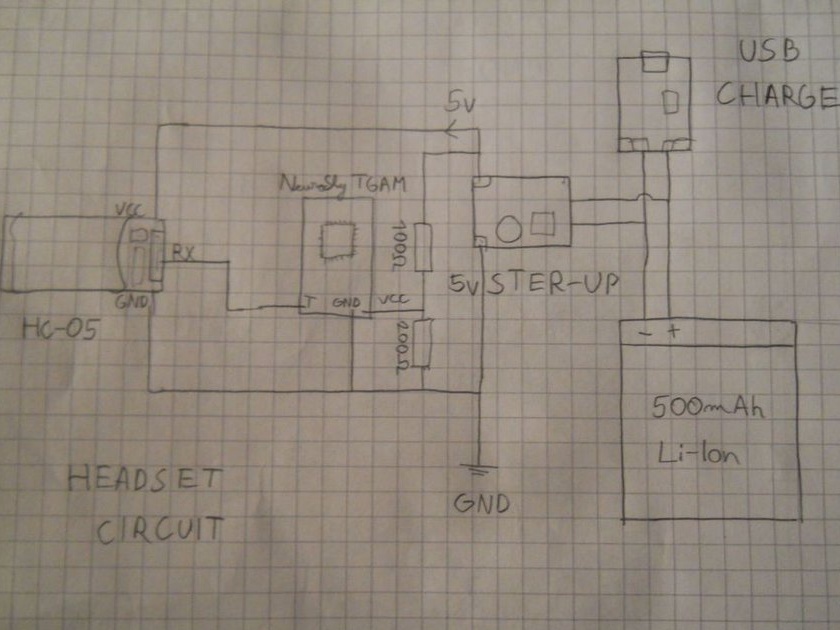
เราต้องการแก้ไขของเล่น EEG นี้สำหรับการถ่ายโอนข้อมูลผ่านบลูทู ธ ดังนั้นก่อนอื่นเราจะถอดเคส สกรูอยู่ใต้สติ๊กเกอร์ นำสติกเกอร์และด้านหลังของอุปกรณ์ออกแล้วคุณจะพบบอร์ดเล็ก ๆ อยู่ด้านใน หนึ่งภายใต้กระดานหลักคือชิป Neurosky TGAM สายไฟ 4 เส้นจากกระดานหลักของไมโครคอนโทรลเลอร์ถูกบัดกรีเข้าที่ดังนั้นจึงต้องบัดกรีเหล็กและนำวงจรนี้ออกอย่างระมัดระวัง ตอนนี้ประสานสามสายไปยังพิน GND, ไปที่ VCC และไปที่พิน T T-pin เป็นเอาท์พุทเครื่องส่งสัญญาณที่มีความเร็ว 57600 baud ซึ่งส่งแพ็กเก็ตข้อมูลไปยังไมโครคอนโทรลเลอร์ของเรา เมื่อคุณบัดกรีสายไฟทั้งสามสายด้านบนแล้วคุณสามารถสร้างในแหล่งพลังงานแบบชาร์จไฟเองได้ ผู้เขียนใช้แบตเตอรี่ลิเธียมไอออน 500 mAh วงจรเครื่องชาร์จ USB วงจรเพิ่ม 5 V และตัวต้านทานสองตัว (100 โอห์มและ 200 โอห์ม) เพื่อจัดหาแหล่งจ่ายไฟ 3.4 V แยกต่างหากสำหรับชิปและโมดูลบลูทู ธ ในภาพแผนภาพการเชื่อมต่อ
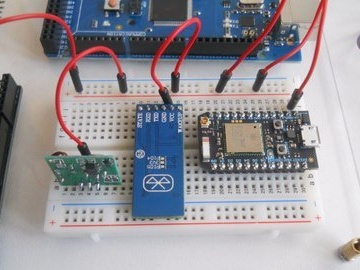
หากวงจรพร้อมใช้งานให้กำหนดค่าโมดูล Bluetooth
ทำตามคำแนะนำและตัวเลขด้านล่างและสร้างชุดหูฟัง EEG ไร้สายของคุณเอง
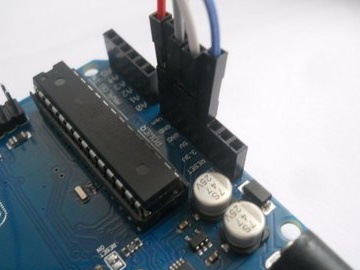
ส่วนที่สำคัญที่สุดคือการเชื่อมต่อขา“ T” กับ“ RX” บนโมดูล Bluetooth



HC-06: อัพโหลดภาพร่างชื่อ“ HC_06_Bluetooth” ครั้งแรกไปยัง Arduino UNO จากนั้นเชื่อมต่อโมดูลบลูทู ธ ตามที่แสดงในแผนภาพ
// HC-06-Bluetooth
การตั้งค่าเป็นโมฆะ () {
// เริ่มอนุกรมฮาร์ดแวร์
Serial.begin (9600); // อัตรารับส่งข้อมูลเริ่มต้น HC-06
ล่าช้า (1,000);
Serial.print ("AT");
ล่าช้า (1,000);
Serial.print ("AT + VERSION");
ล่าช้า (1,000);
Serial.print ("AT + PIN"); // เพื่อลบรหัสผ่าน
ล่าช้า (1,000);
Serial.print ("AT + BAUD7"); // ตั้งค่า baudrate เป็น 576000 - เช่น Necomimi dafault
ล่าช้า (1,000);
Serial.begin (57600); //
ล่าช้า (1,000);
}
void loop () {
}เปิด Serial Monitor ใน Arduino IDE และรอให้ Arduino กำหนดค่าโมดูล BT ตอนนี้โมดูลบลูทู ธ ของคุณถูกตั้งค่าเป็น 57600 baud คุณสามารถลองใช้งานแอปพลิเคชั่น BCI (Brain Computer Interface) มากมายเพราะของเล่น Necomimi ที่ถูกแฮ็กนี้จะเข้ากันได้กับแอปพลิเคชัน Neurosky
คุณสามารถใช้แอพเหล่านี้เพื่อเรียนรู้วิธีควบคุมคลื่นสมองของคุณ
HC-05: จากนั้นใช้“ HC_05_Bluetooth” และโหลด Arduino ของคุณแบบเดิม
// HC-06-Bluetooth
การตั้งค่าเป็นโมฆะ () {
// เริ่มอนุกรมฮาร์ดแวร์
Serial.begin (9600); // อัตรารับส่งข้อมูลเริ่มต้น HC-05
ล่าช้า (1,000);
Serial.print ("AT");
ล่าช้า (1,000);
Serial.print ("AT + VERSION");
ล่าช้า (1,000);
Serial.println ("AT + ROLE = 1"); // ตั้งค่า HC-05 เป็นโหมดหลัก
ล่าช้า (1,000);
Serial.println ("AT + LINK =" ใส่ที่อยู่ของคุณที่นี่ "); // ตอนนี้โมดูลควรเชื่อมต่อโดยอัตโนมัติ
ล่าช้า (1,000);
Serial.print ("AT + UART = 57600,1,0"); // ตั้งค่า baudrate เป็น 576000
Serial.begin (57600); //
ล่าช้า (1,000);
}
void loop () {}
เชื่อมต่อพิน "EN" ของ HC-05 เข้ากับ Arduino 3v3 คุณต้องเขียนที่อยู่ของโมดูล HC-06 ของคุณในรหัส ตรวจสอบที่อยู่โมดูล BT บนสมาร์ทโฟน Android ของคุณ แทนที่ ":" (จุดสองจุด) ด้วยเครื่องหมายจุลภาค "," ในรหัส
และคุณต้องเปลี่ยนที่อยู่ในรหัส: 20: 15: 09: 15: 17: 82 = 2015.09.151782 ดังนั้นโมดูล HC-05 จึงสามารถจดจำที่อยู่ได้
การควบคุมระยะไกล
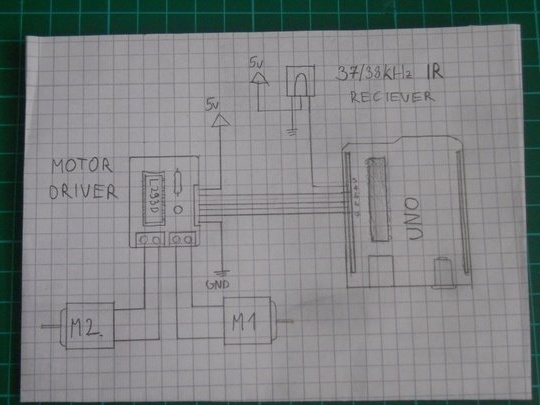
ในการสร้างหุ่นยนต์ราคาไม่แพงใช้เซ็นเซอร์อินฟราเรด 38 kHz ซึ่งใช้ในการควบคุมระยะไกลของโทรทัศน์
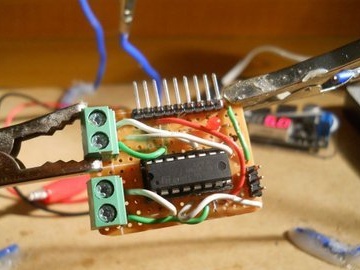
ไดรเวอร์เครื่องยนต์
Engine Drive Diagram - คุณจะต้องมีรายละเอียดดังต่อไปนี้:
เทอร์มินัลสกรู 2 ตัว
L293D IC3
Header Pin (90 องศา)
ตัวต้านทาน 1k
LED สีแดง
ลวด
แผงวงจร
ใช้สายทองแดงหลายเส้นและต่อจากแผนภาพเชื่อมต่อพินไมโครเซอร์กิตเข้ากับพินตัวเชื่อมต่อ ไม่สำคัญว่าขาของ microcircuit ใดที่ขาของตัวเชื่อมต่อเพียงจำที่คุณเชื่อมต่อพวกเขา LED เชื่อมต่อแบบอนุกรมกับตัวต้านทานและขนานกับ 5 V VCC
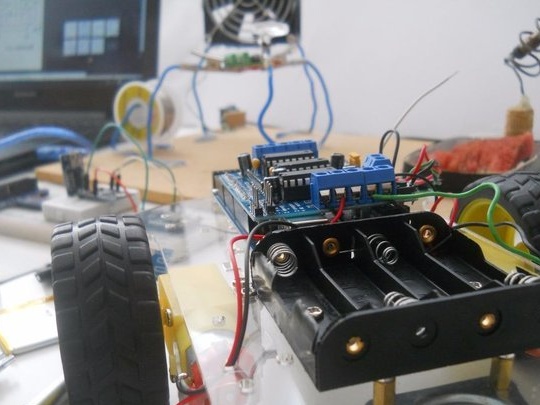
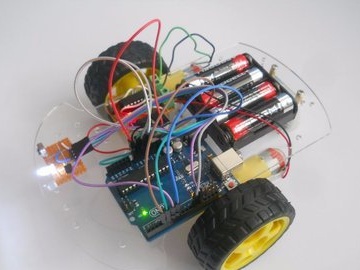
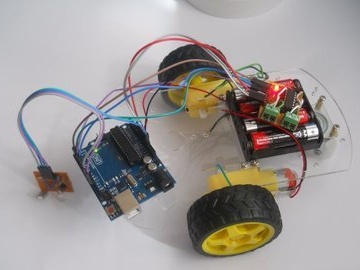
ประกอบตัวถัง
ในฐานะที่เป็นคนขับมอเตอร์ไฟฟ้าใช้ชิป L293D ซึ่งสามารถควบคุมมอเตอร์สองตัว ดูไดอะแกรมเพื่อสร้างไดอะแกรม
เชื่อมต่อชิ้นส่วนกับ Arduino
Arduino Pin == & gt; ขับมอเตอร์
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
ดังนั้นดูที่แผนภาพวงจรของโมดูล L293D จากนั้นเชื่อมต่อผู้ติดต่อกับ Arduino UNO ดังที่อธิบายไว้ข้างต้น ขา 5v Arduino ต้องเชื่อมต่อกับพิน 1, 9, 16 เพื่อเปิดใช้งานฟังก์ชั่นควบคุมมอเตอร์ชิป จากนั้นใช้ขั้วสกรูเพื่อเปิดมอเตอร์
ห้องสมุดใช้ IRremote ซึ่งเป็นรหัสที่อ่านสัญญาณอินฟราเรด 38 kHz ถอดรหัสพวกมันแล้วย้ายหุ่นยนต์ (ดาวน์โหลดไลบรารี่ในส่วน "ซอฟต์แวร์")
มีความคิดเห็นในรหัส แต่บรรทัดล่างคือการถอดรหัสสัญญาณ IR ที่มาจากเซิร์ฟเวอร์หลักจากนั้นขึ้นอยู่กับสิ่งที่ผู้ใช้ต้องการมันจะเปิดเครื่องยนต์หลังจากที่หุ่นยนต์เคลื่อนที่ไปข้างหน้าหรือเลี้ยวซ้าย ดาวน์โหลดรหัส: "Robot_Code" ดาวน์โหลดไปที่ Arduino ของคุณและหุ่นยนต์ของคุณจะพร้อม
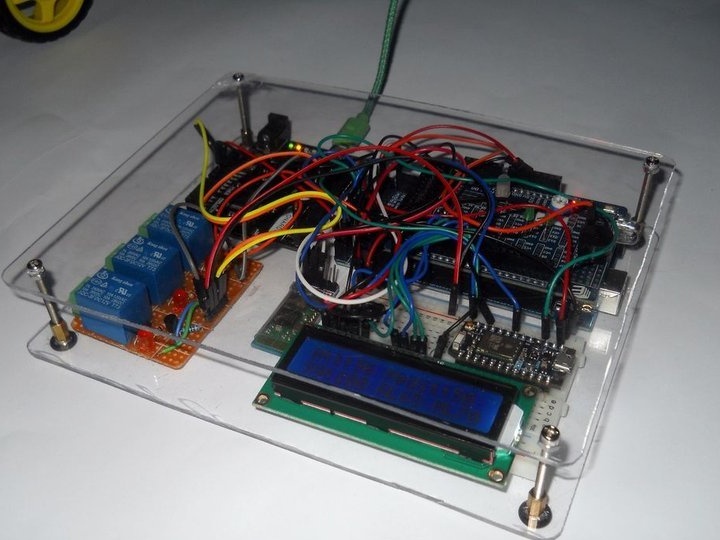
เซิร์ฟเวอร์หลัก (Arduino Mega, Leonardo, Photon)




เซิร์ฟเวอร์อ่านแพ็กเก็ตข้อมูลขาเข้าจากชุดหูฟังไร้สาย เราจะใช้โมดูล BT ที่กำหนดค่าเพื่อให้การสื่อสารระหว่างชุดหูฟังและเซิร์ฟเวอร์ Arduino Mega เป็นสมองของวงจรทั้งหมดทุกอย่างเชื่อมต่อกับไมโครคอนโทรลเลอร์นี้: บลูทู ธ , LED อินฟราเรดส่งสัญญาณ, เว็บเซิร์ฟเวอร์และตัวควบคุมเมาส์ รหัสมีความซับซ้อนเล็กน้อย แต่ตามกฎแล้วมันมีความคิดเห็นที่จะเข้าใจ
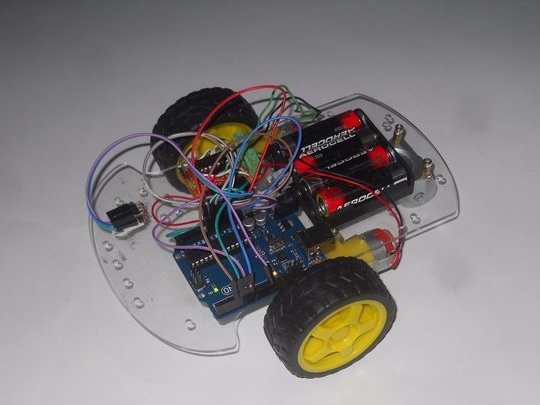
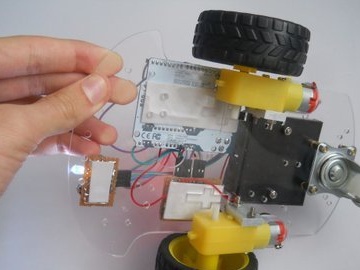
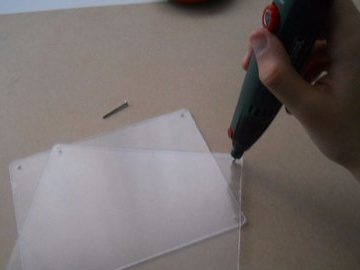
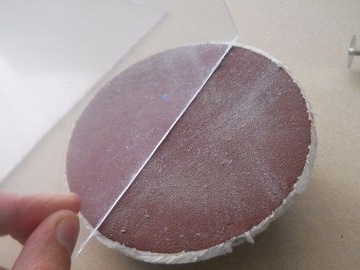
การเคหะ
ทุกอย่างง่าย แผ่นลูกแก้ว 18x15 ซม. สองแผ่น, ปรับขอบให้เรียบด้วยกระดาษทราย สกรูหลายตัวเชื่อมต่อเข้าด้วยกัน
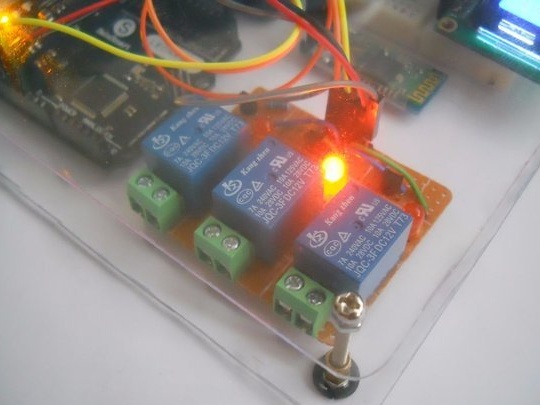
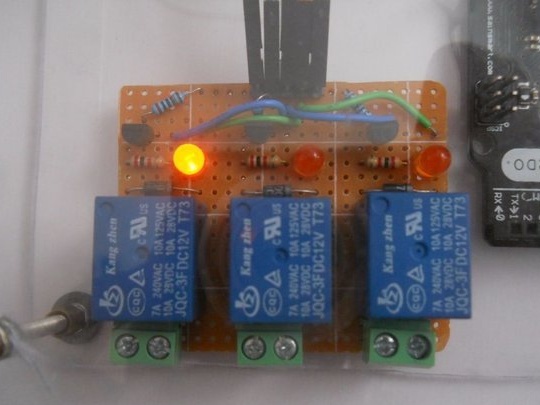
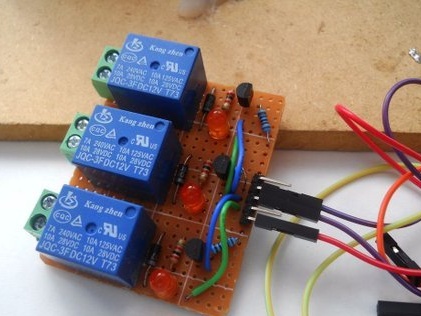
บอร์ดรีเลย์
คุณจะต้องมีรายละเอียดดังต่อไปนี้:
2n2222 ทรานซิสเตอร์ (3 ชิ้น)
ไดโอดเจอร์เมเนียม (3 ชิ้น)
ตัวต้านทาน 330 โอห์ม (3 ชิ้น)
ตัวต้านทาน 1 kOhm (3 ชิ้น)
รีเลย์ 5 โวลต์ (3 ชิ้น)
ขั้วต่อขา
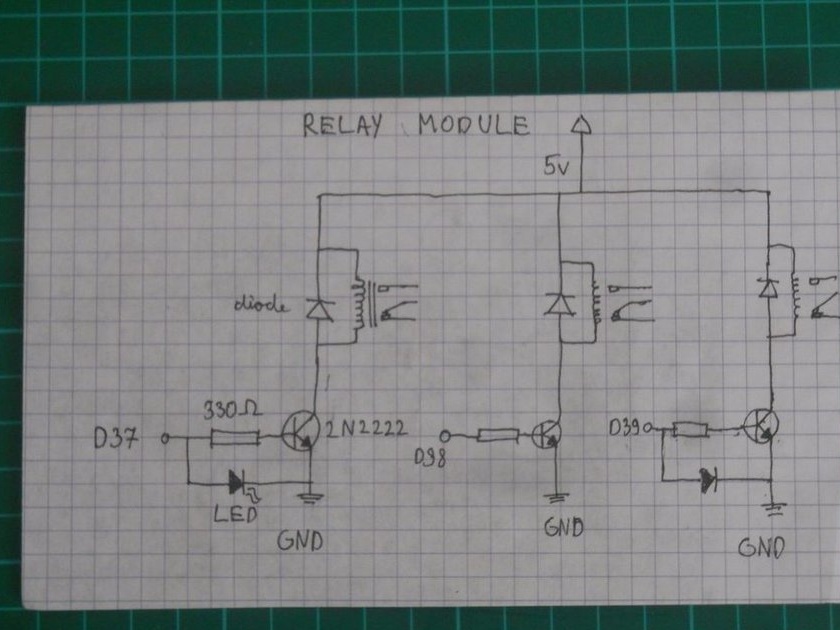
แผงวงจร
ภาพมีค่ามากกว่าหนึ่งพันคำดังนั้นให้ดูที่แผนภาพของวิธีการเชื่อมต่อชิ้นส่วนบนแผงวงจรพิมพ์
หากเอาต์พุต“ สัญญาณ” มาจาก Arduino รีเลย์จะเปิด ทรานซิสเตอร์ขยายสัญญาณเพื่อให้พลังงานเพียงพอสำหรับการถ่ายทอด เราจะใช้หน้าสัมผัส 37-38-39 เพื่อควบคุมระดับสูงต่ำของรีเลย์แต่ละตัว
ในการติดตั้งชิ้นส่วนบนกล่องลูกแก้วผู้เขียนใช้เทปสองด้าน เขาเก็บรายละเอียดได้สวยมาก
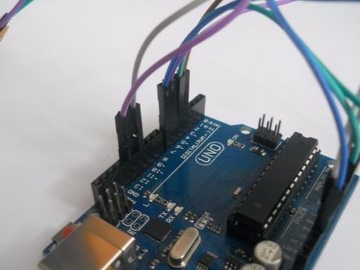
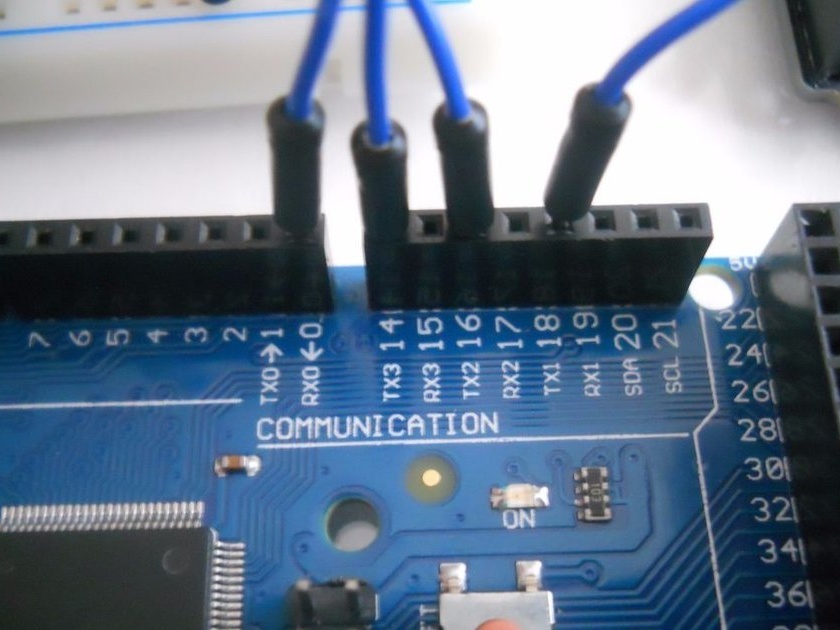
นี่คือเซิร์ฟเวอร์ซอฟต์แวร์ดังนั้นการสร้างวงจรจึงไม่ยาก คุณเพียงแค่ต้องเปิดไมโครคอนโทรลเลอร์และสร้างการเชื่อมต่อระหว่างพวกเขา IR LED เชื่อมต่อกับขา D3 และรีเลย์เชื่อมต่อกับ 37-38-39 D16 Arduino Mega ไปที่ RX Photon และ D18 ไปยัง RX Leonardo
การเชื่อมต่อหุ่นยนต์
[2.02 Kb] (ดาวน์โหลด: 14)
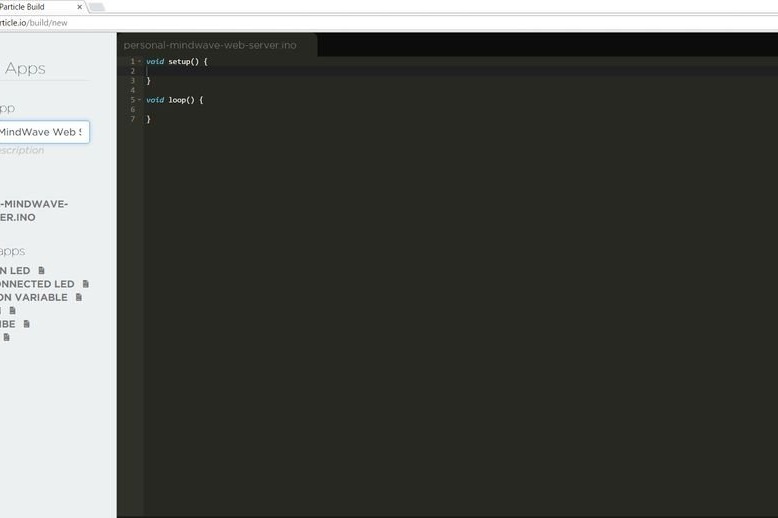
แต่ตอนนี้รหัสนั้นพร้อมใช้งานแล้วดังนั้นคุณต้องดาวน์โหลดไมโครคอนโทรลเลอร์ของคุณ ดาวน์โหลดไฟล์. ori หรือคัดลอก / วางรหัสลงใน IDE ของคุณและใช้งาน ต้องดาวน์โหลดรหัสสำหรับอนุภาคโฟตอนผ่านเบราว์เซอร์ IDE หากต้องการทำสิ่งนี้ลงทะเบียนที่ และเชื่อมต่อแล็ปท็อปของคุณเข้ากับไมโครคอนโทรลเลอร์ทุกอย่างเกิดขึ้นโดยอัตโนมัติเพียงแค่เพิ่ม ID อุปกรณ์ของคุณ
ก่อนที่จะดาวน์โหลดรหัสตรวจสอบให้แน่ใจว่าไม่มีสิ่งใดเชื่อมต่อกับหมุด RX / TX ดังนั้นตัดการเชื่อมต่อโมดูลบลูทู ธ ของคุณจากเมกะและปลดการเชื่อมต่อเมกะจาก Leonardo และ Photon
[489 b] (ดาวน์โหลด: 15)

เว็บเซิร์ฟเวอร์ในการเพิ่มฟังก์ชั่น IoT (Internet of Things) ให้กับโครงการของเขาผู้เขียนได้ทำการบันทึกข้อมูลออนไลน์โดยใช้ Particle Photon Photon สร้างเซิร์ฟเวอร์ส่วนบุคคลและเขียนข้อมูลไปยังคลาวด์ทั้งนี้ขึ้นอยู่กับสิ่งที่คุณทำกับอุปกรณ์สิ่งนี้อาจดูน่ากลัวในตอนแรก แต่ลองจินตนาการว่าคุณสามารถตัดสินได้ว่าคุณเครียดหรือไม่ (ระดับความสนใจเพิ่มขึ้นและลดลงอย่างรวดเร็ว) หรือมันคุ้มค่าที่จะไปนอน
(ระดับการทำสมาธิอยู่เหนือ 80 เสมอ)
. เว็บเซิร์ฟเวอร์นี้สามารถช่วยให้คุณมีสุขภาพที่ดีขึ้น
การเข้ารหัสเบราว์เซอร์
Particle ยังมีพาเนลออนไลน์ที่คุณสามารถเผยแพร่ข้อมูลใด ๆ โดยใช้“ Particle.publish ();” วากยสัมพันธ์ ผู้พัฒนาแถบเครื่องมือช่วยประหยัดเวลาได้มากสำหรับผู้ใช้
