

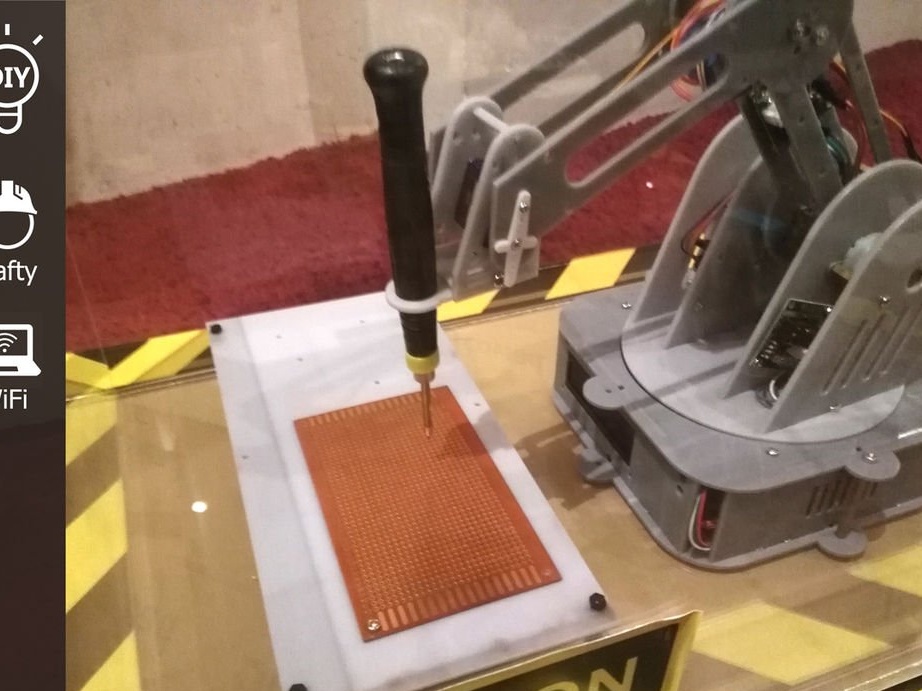

น่าเสียดายที่วัสดุนี้จะไม่ดึงบทความเต็มเปี่ยมดังนั้นฉันตัดสินใจที่จะวางไว้ใน "เคล็ดลับ" บางทีใครบางคนอาจต้องการเนื้อหา บทความบอกวิธีการประสาน อิเล็กทรอนิกส์ ส่วนประกอบบนแผงวงจรพิมพ์โดยใช้แขนกลอัตโนมัติ
ความคิดของโครงการนี้เกิดขึ้นกับนายโดยบังเอิญเมื่อเขาศึกษาความสามารถของหุ่นยนต์ที่หลากหลายและจากนั้นค้นพบว่ามีหลายสิ่งที่ครอบคลุมพื้นที่ของการเชื่อมอัตโนมัติและการบัดกรีโดยหุ่นยนต์หุ่นยนต์
เครื่องมือและวัสดุ:
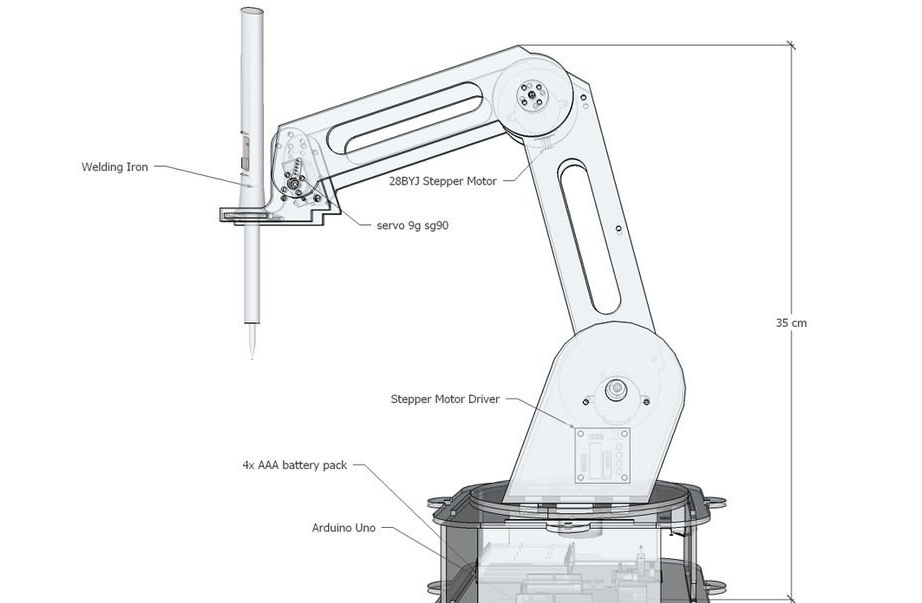
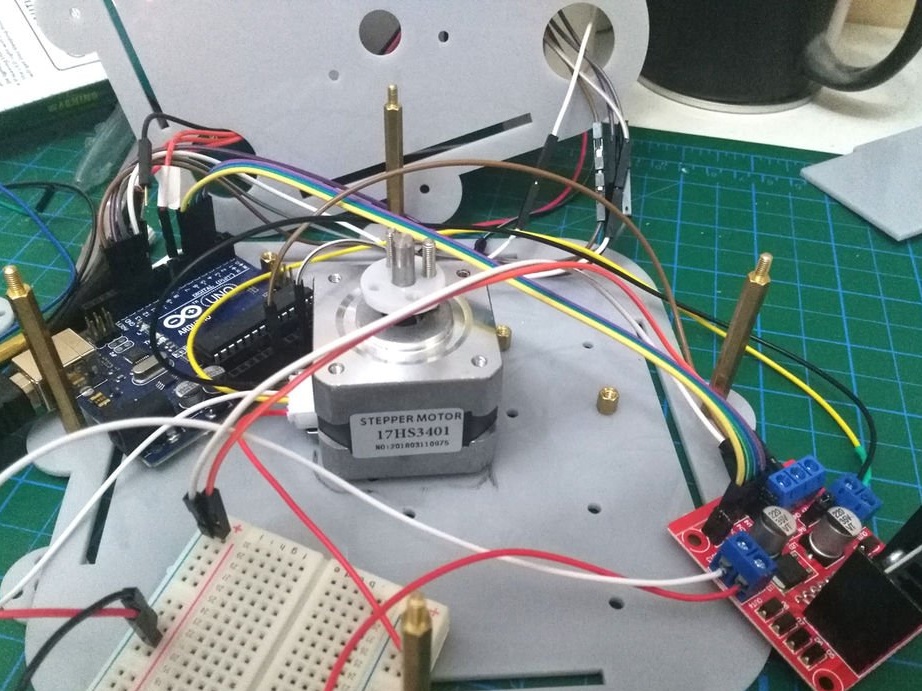
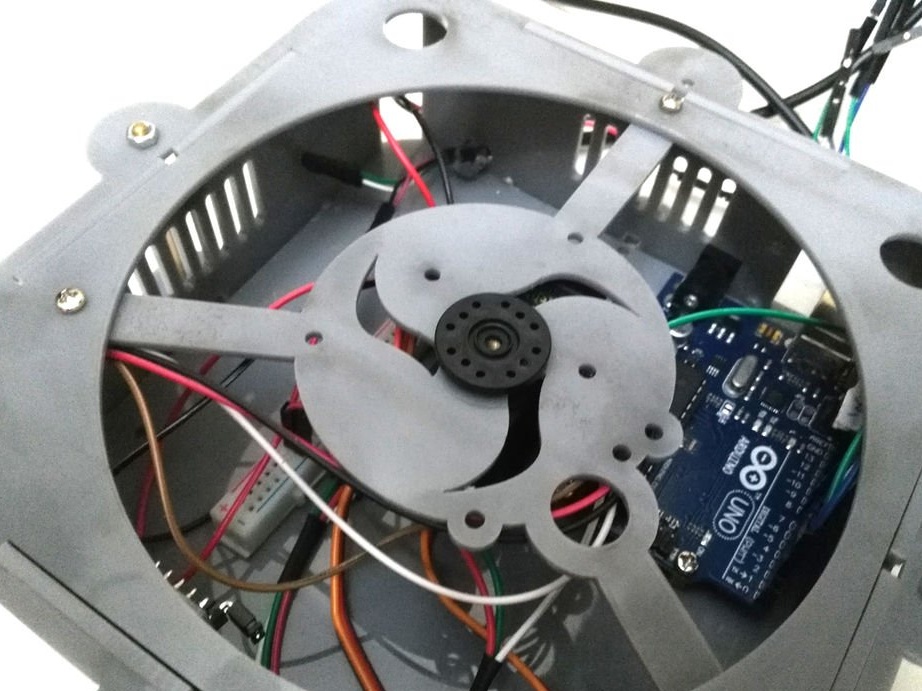
- ขั้นตอนมอเตอร์ 28BYJ-48 พร้อมโมดูลไดรเวอร์ ULN2003;
- Arduino Uno R3;
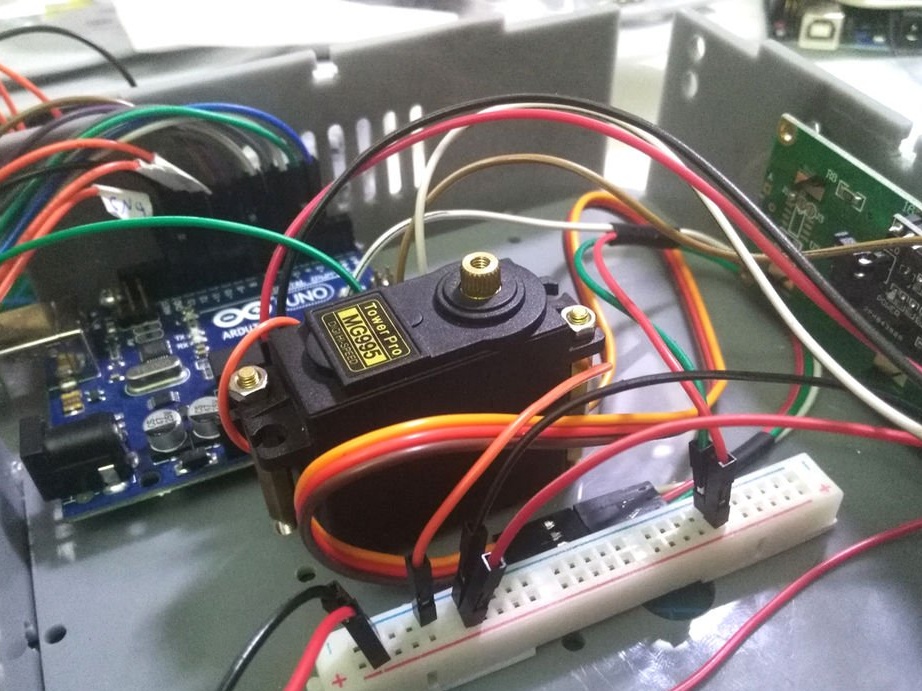
เซอร์โวมอเตอร์ MG-90S;
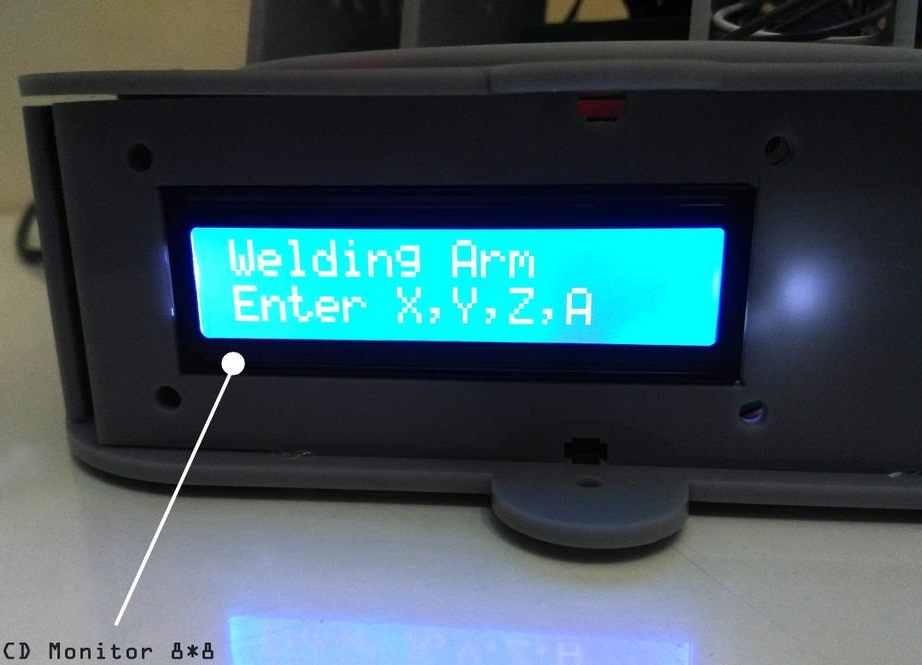
- LCD 1602;
คณะกรรมการ -Maketnaya;
- สายเชื่อมต่อ
- ลดการแปลง;
-Servox SC-1252MG $ Servo Drive
-Krepezh;










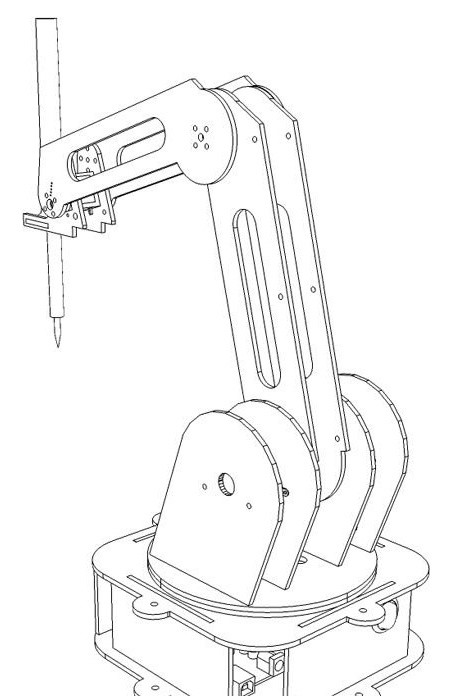
ตัวช่วยสร้างพัฒนาโครงการเป็นครั้งแรก รายละเอียดบางส่วนถูกตัดออกไปในเครื่อง CNC ด้วยเลเซอร์
หลังจากรวบรวมชิ้นส่วนทั้งหมดแล้วพบปัญหาจำนวนหนึ่ง:
1. คันโยกนั้นหนักเกินไปสำหรับมอเตอร์สเต็ปขนาดเล็กที่จะควบคุม
2. ตั้งแต่ รูปแบบ ทำจากพลาสติกความเสียดทานของฐานหมุนสูงและการเคลื่อนไหวไม่ราบรื่น
ทางออกแรกคือซื้อมอเตอร์สเต็ปขนาดใหญ่ที่สามารถทนต่อน้ำหนักและแรงเสียดทานได้และมาสเตอร์จะจัดฐานใหม่สำหรับการติดตั้งสเต็ปเปอร์มอเตอร์ขนาดใหญ่
แต่ปัญหาก็ไม่ได้หายไปจากนั้นอาจารย์ก็เปลี่ยนการออกแบบขั้นพื้นฐานอย่างสมบูรณ์และติดตั้งเซอร์โวมอเตอร์พร้อมกระปุกเกียร์และเฟืองโลหะ
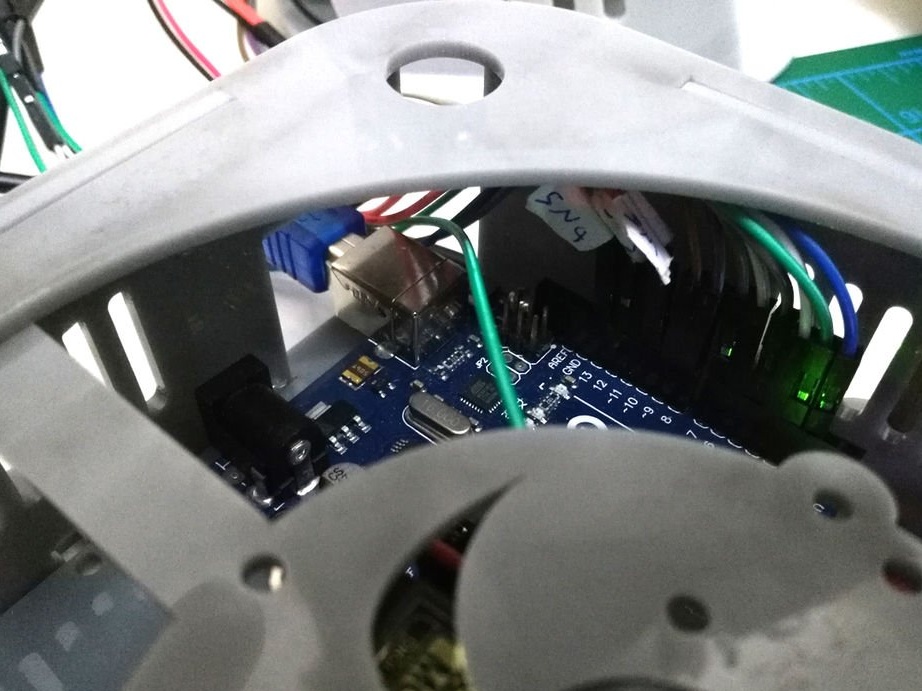
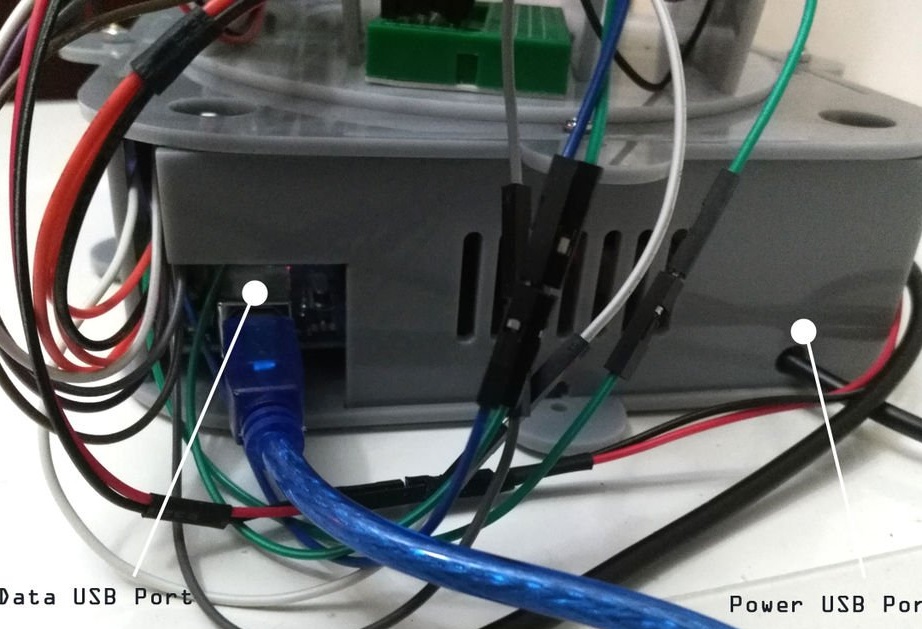
3. แรงดันไฟฟ้า
Arduino สามารถรับพลังงานได้ทั้งจากขั้วต่อไฟ DC (7-12 V), ขั้วต่อ USB (5 V) หรือจากขา VIN ของบอร์ด (7-12 V) แรงดันไฟฟ้าผ่านหน้าสัมผัส 5 V หรือ 3.3 V ผ่านตัวควบคุมและอาจารย์ตัดสินใจซื้อสาย USB พิเศษที่รองรับ 5 V จากพีซีหรือแหล่งพลังงานใด ๆ

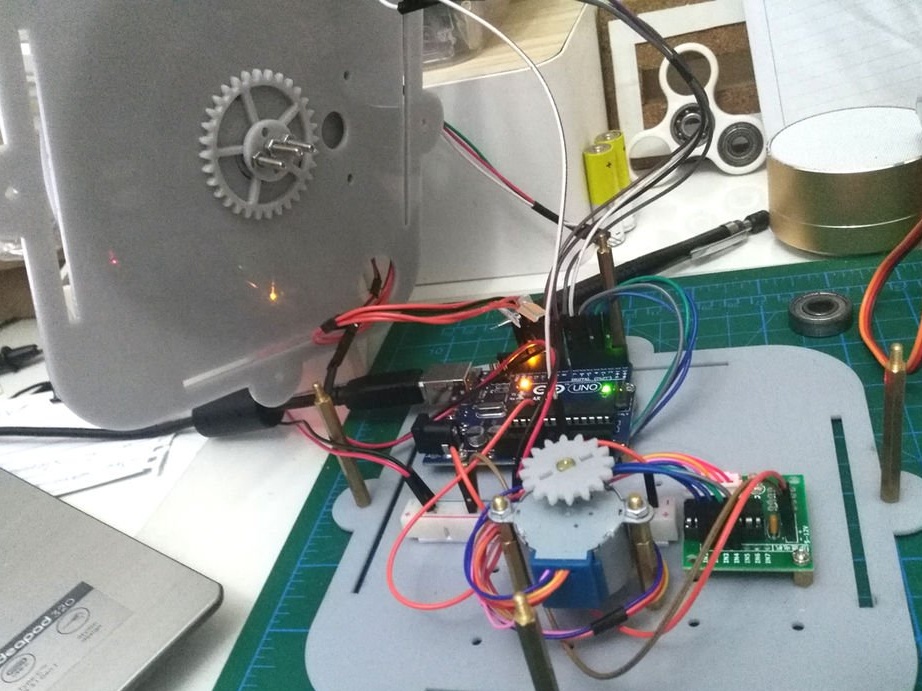
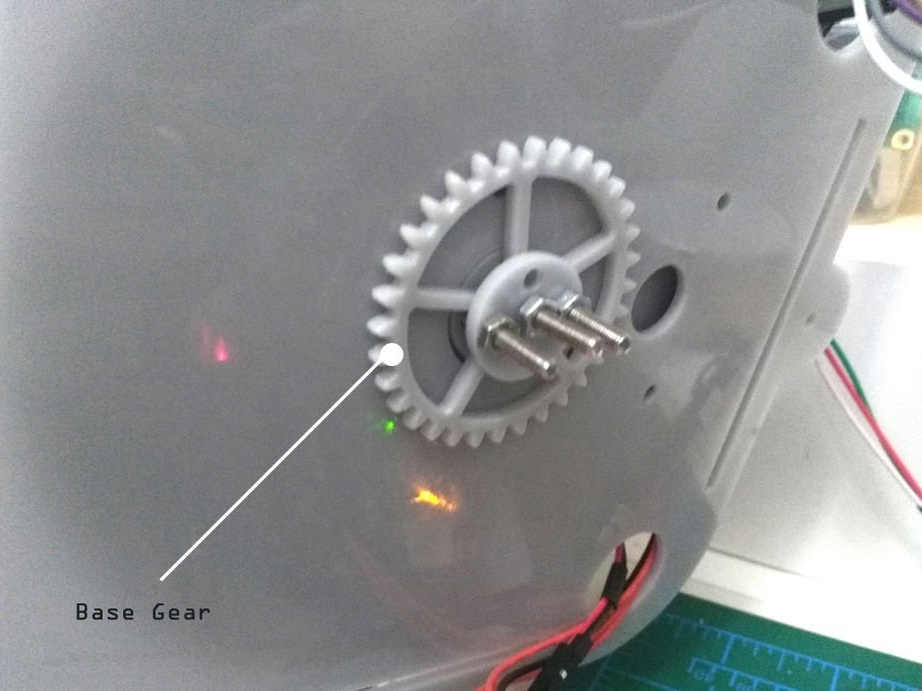

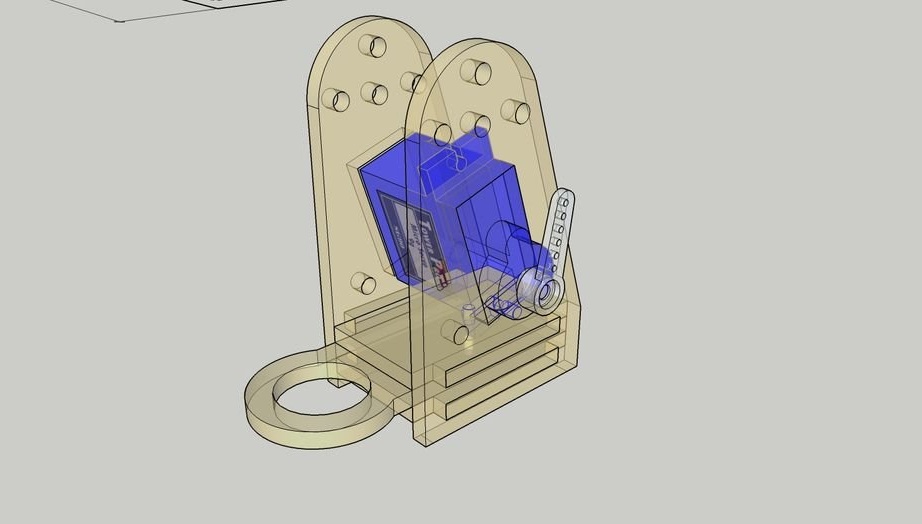
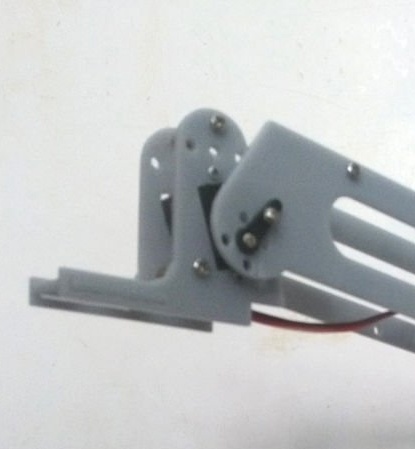
หลังจากการดัดแปลงบางส่วนแล้วอาจารย์ได้เปลี่ยนรูปแบบการออกแบบลดขนาดของตัวยึดและทำให้รูที่เหมาะสมสำหรับกระปุกเกียร์เซอร์โวมอเตอร์ดังที่แสดงในภาพ

ในการเก็บหัวแร้งนั้นเจ้านายได้ทำการยึดแบบพิเศษเพื่อการทำงานที่เหมาะสมจำเป็นต้องมีเซอร์โวมอเตอร์พร้อมพารามิเตอร์การหมุน 180 องศา

รหัสสามารถดาวน์โหลดได้ด้านล่าง

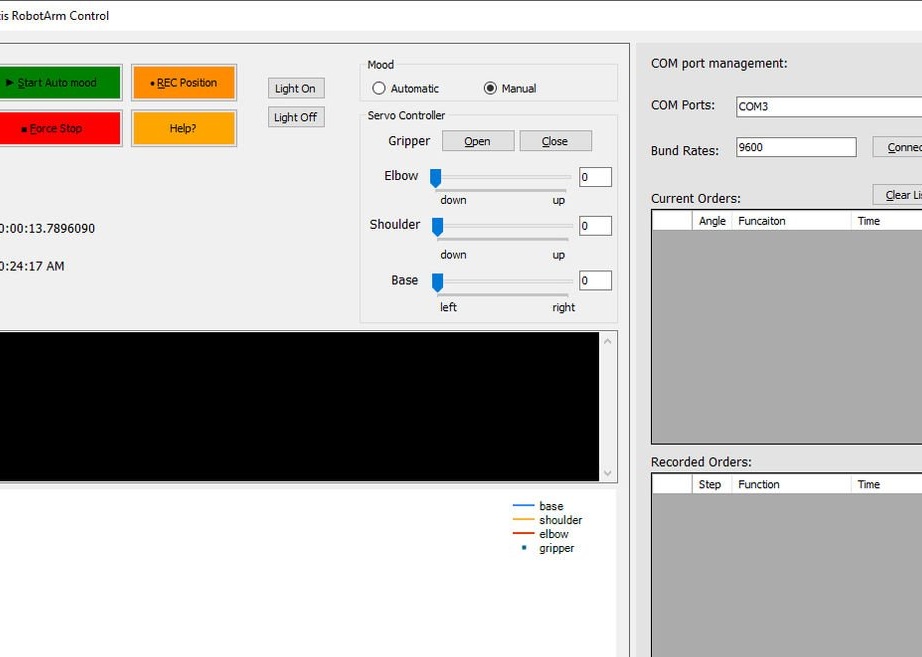
ProjectCodeFirst.ino
ไฮไลท์ของการผลิตอุปกรณ์สามารถดูได้ในวิดีโอ
แน่นอนว่ามีข้อมูลไม่เพียงพอไม่มีวงจรไม่มีไฟล์สำหรับ CNC ไม่มีตัวอย่างของอุปกรณ์ แต่มีความคิดที่ดีและบางทีตัวช่วยสร้างที่สนใจตามความคิดนี้เขาจะทำให้อุปกรณ์ทำงานได้อย่างสมบูรณ์