การเดินของเขาคล้ายกับแมลงสาบตัวจริงมาก เมื่อเดินมันจะแกว่งไปข้างหน้าเล็กน้อยอย่างมั่นใจ แมลงสาบมีชิ้นส่วนที่ซับซ้อนน้อยที่สุดและผลิตได้ง่ายมาก
1. การทดสอบวิดีโอ
วิดีโอแสดงแมลงสาบเชิงกลจากมุมที่แตกต่างระหว่างการทำงานและการเคลื่อนไหว
2. ลักษณะและคุณสมบัติ
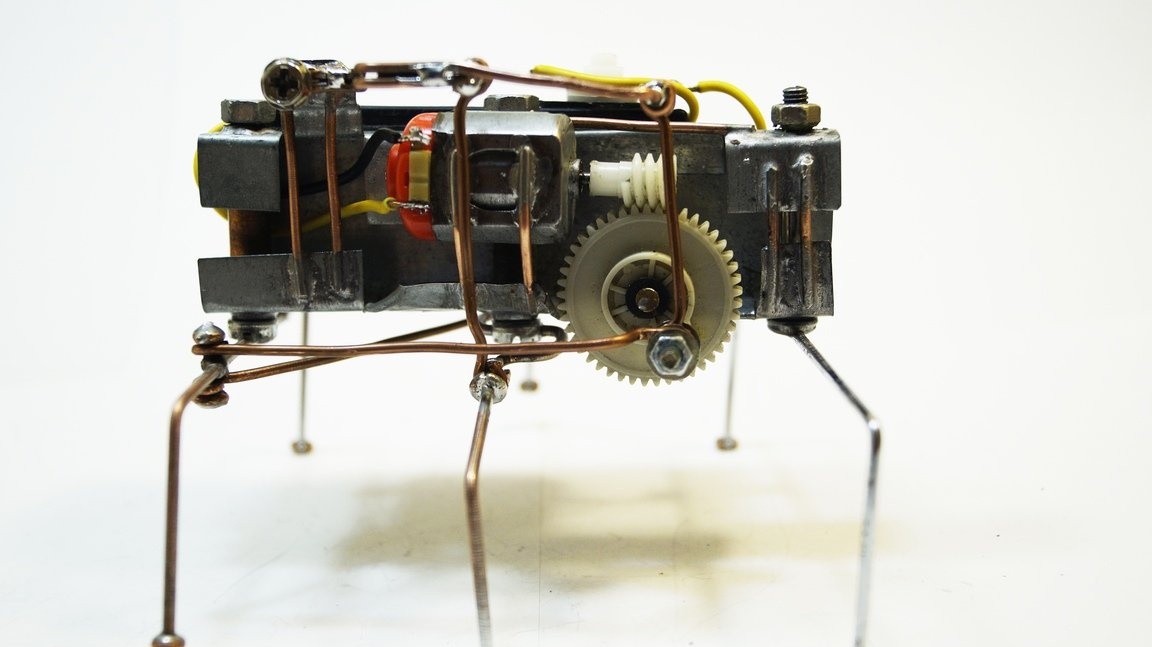
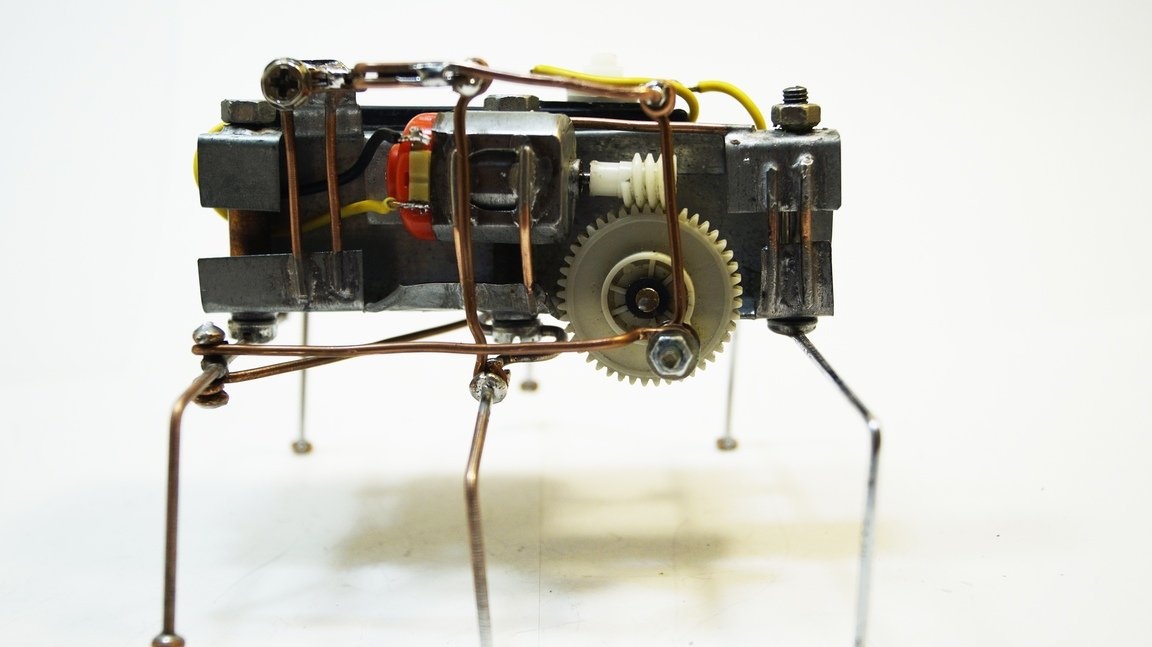
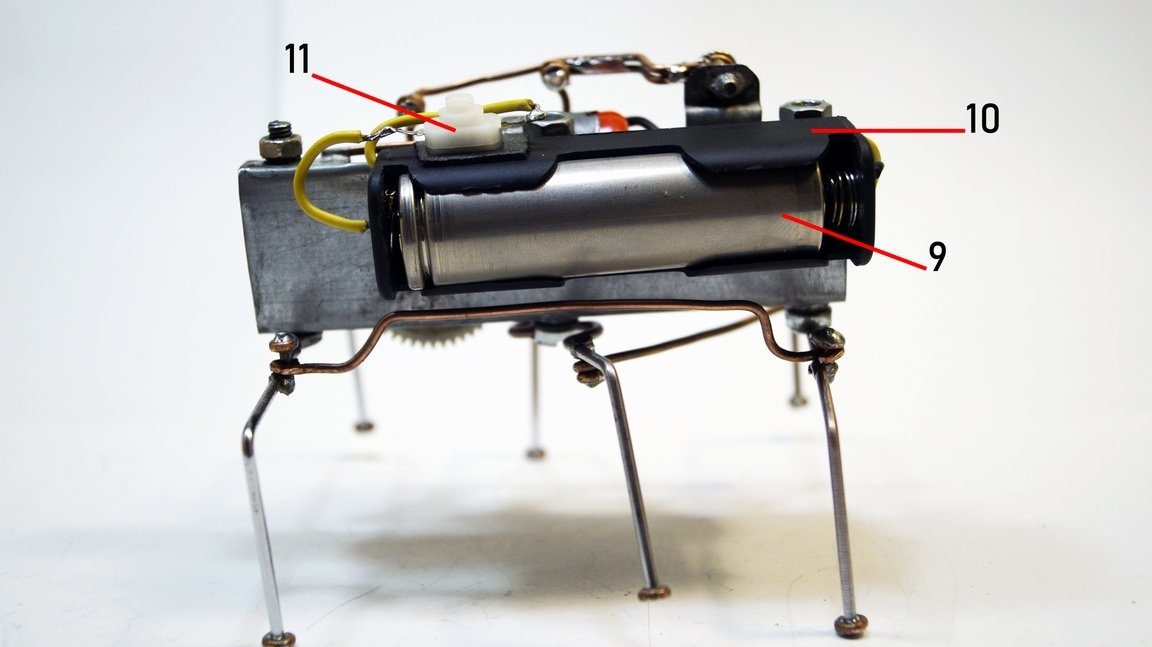
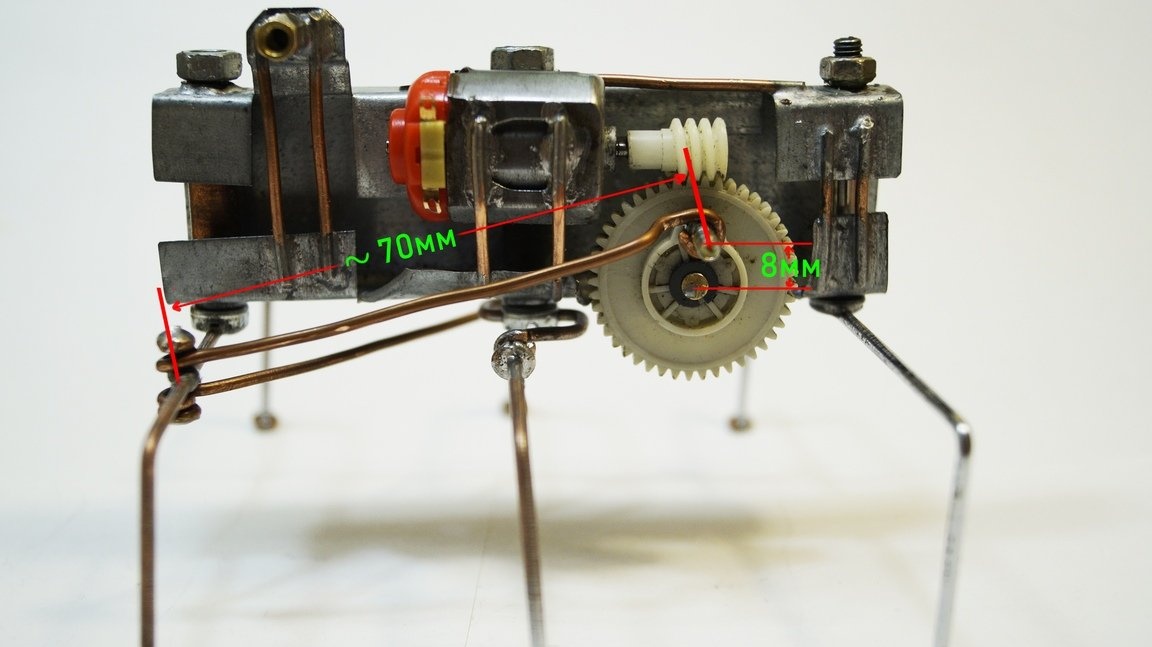
ในภาพ 1. แมลงสาบเชิงกลแสดงขึ้น, มุมมองด้านข้าง ในรูปภาพ 2. มุมมองด้านบนจะปรากฏขึ้น
รูปภาพที่ 1
รูปภาพที่ 2
การก่อสร้าง ในฐานะเฟรมโปรไฟล์ ppn-2 30X20 ถูกนำมาใช้ เครื่องยนต์และข้อต่ออื่น ๆ ติดตั้งโดยการบัดกรี Paws ของแมลงสาบจะยึดด้วย M6 นอต ปุ่มเปิดปิดและช่องใส่แบตเตอรี่ติดอยู่ที่เทปสองด้าน เป็นแรงฉุดสำหรับการขับขาของแมลงสาบใช้สายทองแดงที่มีขนาด 2.5 มม.
มอเตอร์และเพลาข้อเหวี่ยง มอเตอร์และแกนข้อเหวี่ยงจะถูกบัดกรีเข้ากับเฟรมใน POS-61, บัดกรีกรด ZnCl (ซิงค์คลอไรด์) เพื่อเพิ่มแรงบิดและลดขนาดใช้เฟืองตัวหนอน
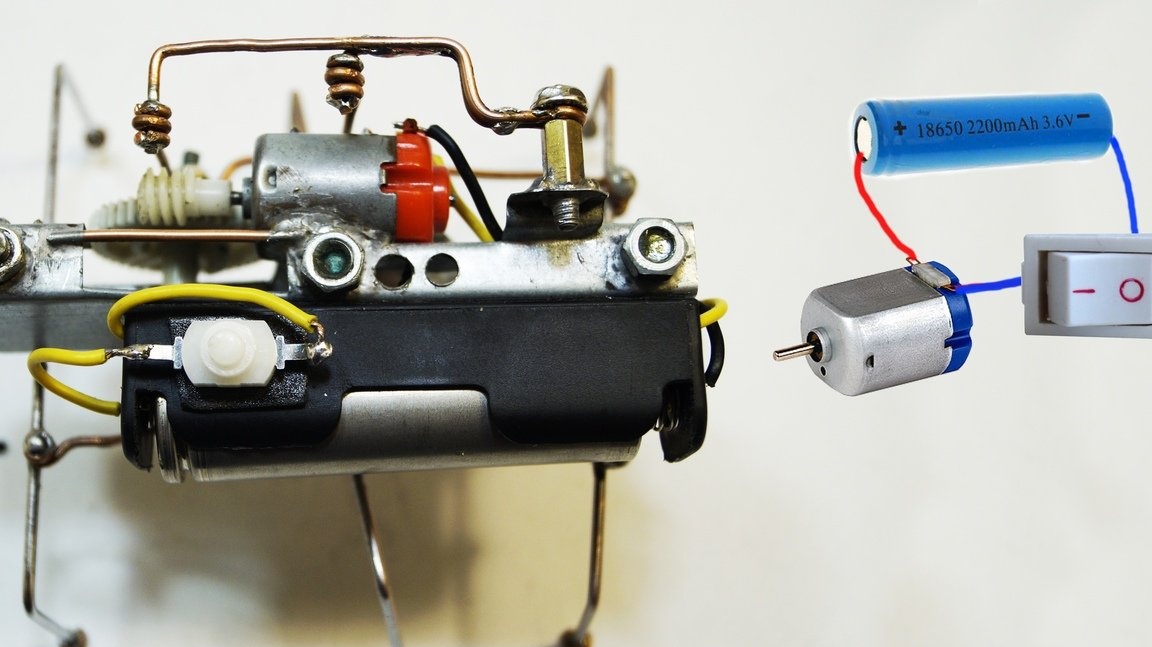
เพาเวอร์ ใช้แบตเตอรี่ 18650 เป็นพลังของหุ่นยนต์แหล่งพลังงานคือ 3.7V
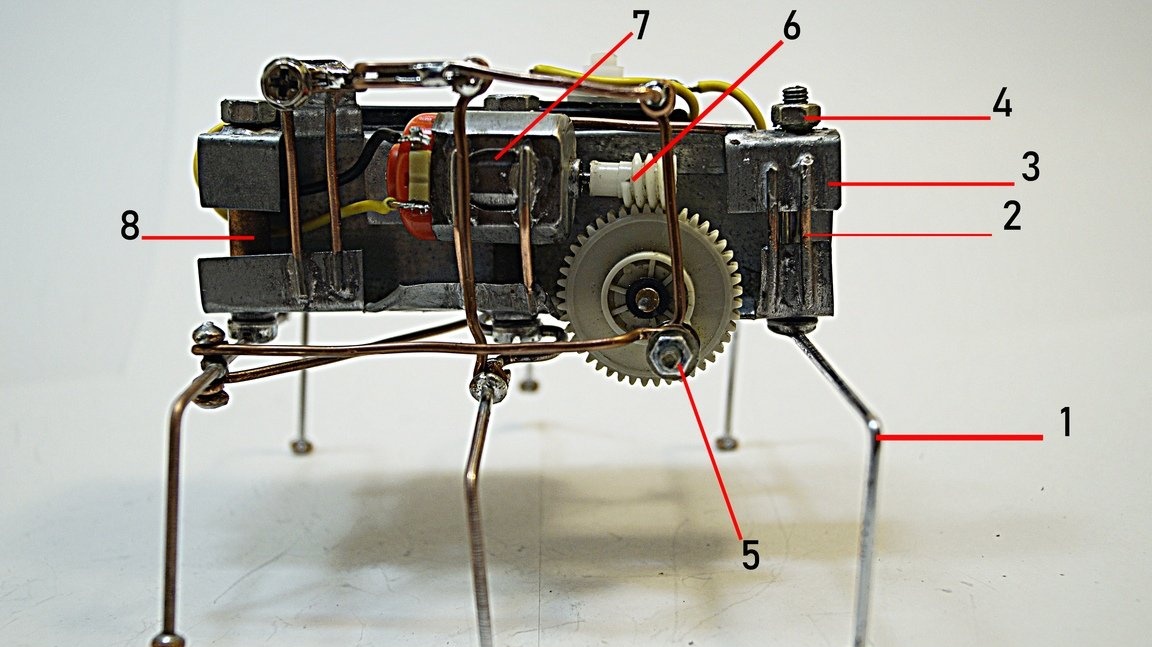
ROBOT DESIGN DETAILS
1. อุ้งเท้าของแมลงสาบ
2. ทำให้แข็งทื่อ
3. กรอบ
4. แกนของอุ้งเท้าของแมลงสาบ
5. กลไกข้อเหวี่ยง
6. หนอนไดรฟ์
7. มอเตอร์ไฟฟ้า F130 5 V.
8. แกนแขนของอุ้งเท้าแมลงสาบ
9. แบตเตอรี่ชนิด 18650, 3.7 V.
10. ช่องใส่แบตเตอรี่
11. ปุ่มเปิดปิด
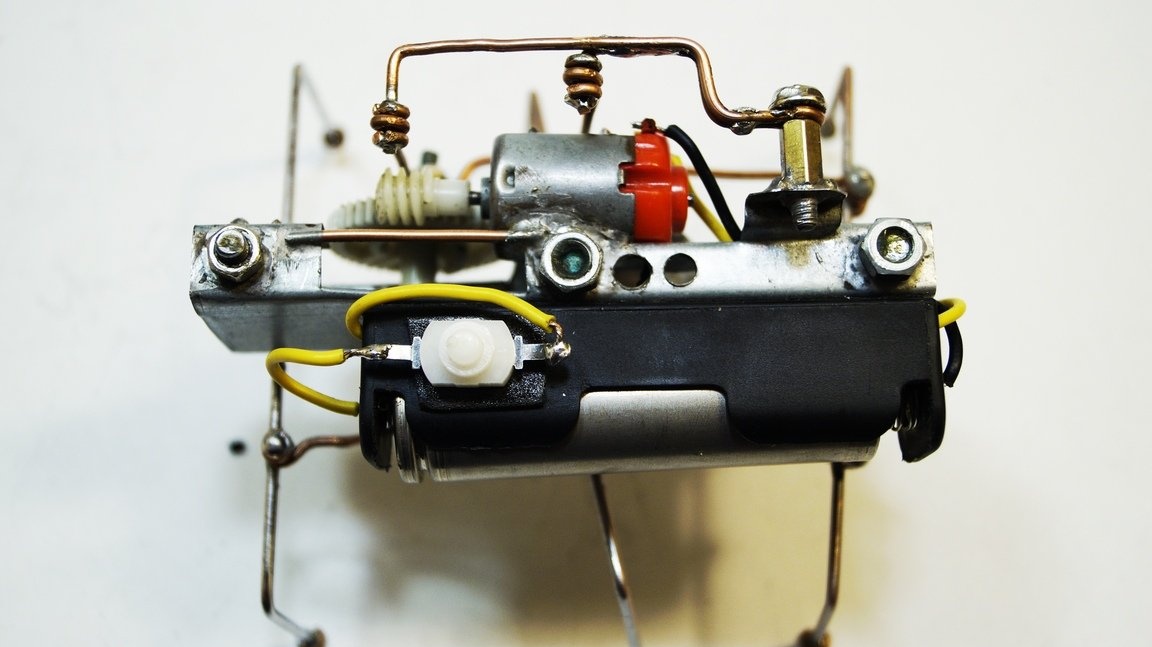
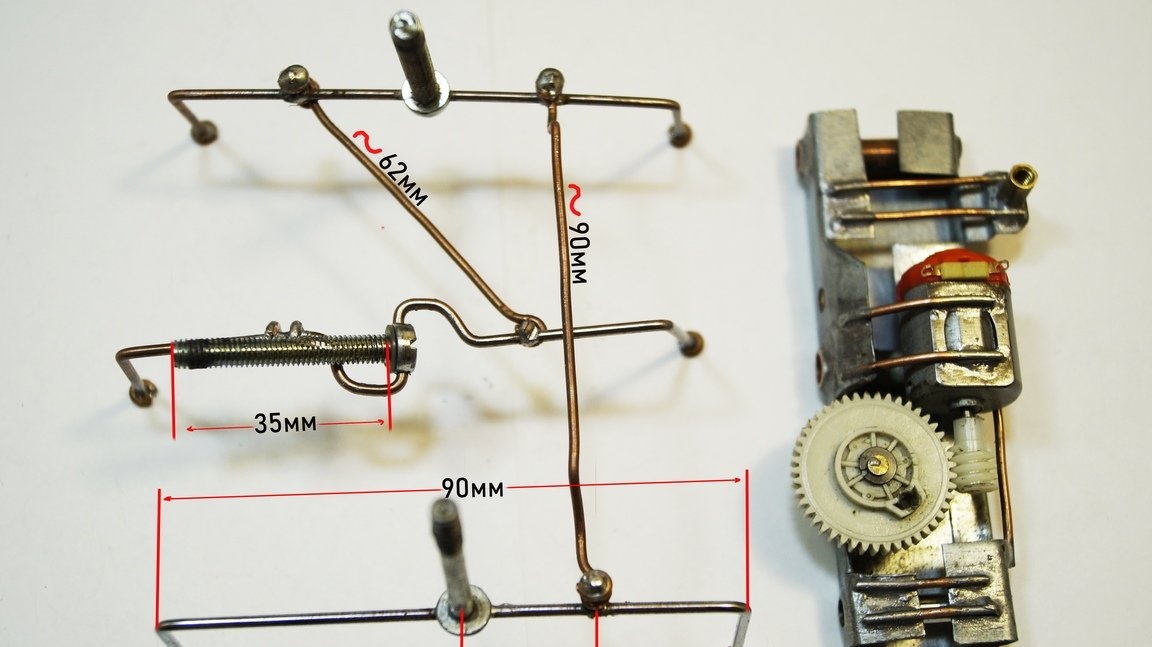
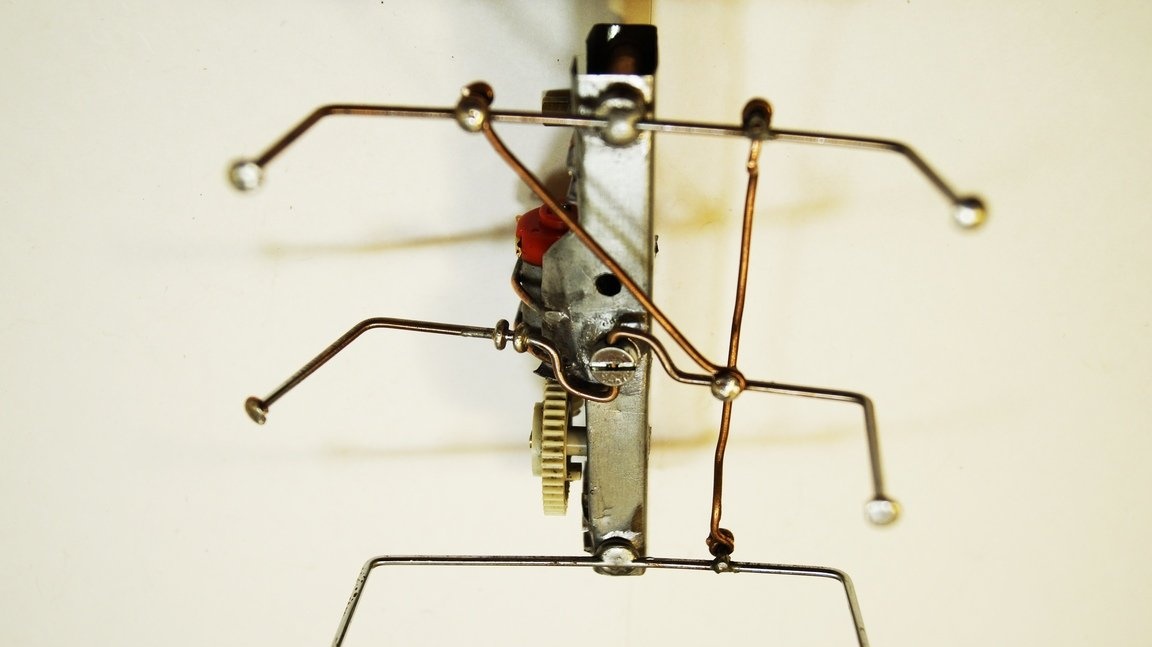
3. หลักการทำงาน
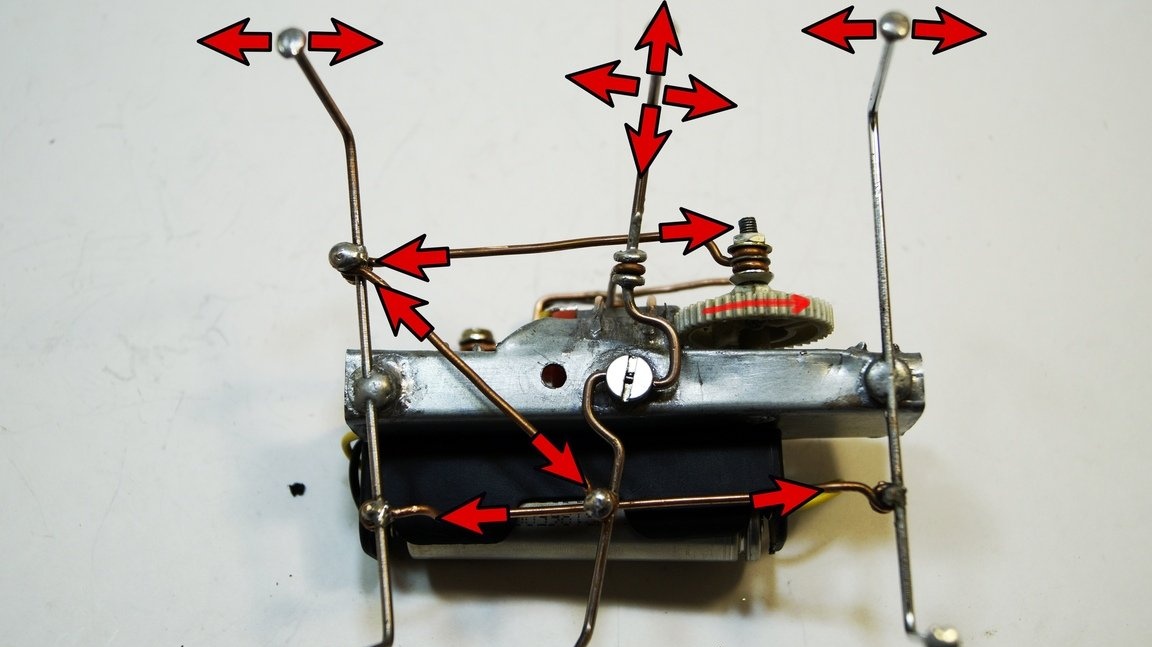
ในภาพที่ 3. 4. หลักการทำงานของชิ้นส่วนทางกลของแมลงสาบแสดงให้เห็น เป็นที่น่าจดจำว่าขาหน้าและหลังของหุ่นยนต์เคลื่อนที่ในแนวนอนและขากลางเคลื่อนไหวในแนวตั้งและแนวนอน
กำลังไฟฟ้าถูกส่งไปยังมอเตอร์ไฟฟ้าผ่านทางกุญแจมอเตอร์หมุนกลไกข้อเหวี่ยง ข้อเหวี่ยงขับอุ้งเท้าหน้าผ่านการลากตามลำดับจากอุ้งเท้าหน้าแรงขับดันอุ้งเท้าหลัง อุ้งเท้าคู่กลางเชื่อมต่อกับคู่แรกเป็นแนวขวาง
ในการเคลื่อนย้ายอุ้งเท้าคู่กลางในแนวตั้งคันโยกจะติดตั้งอยู่เหนือมอเตอร์ซึ่งตั้งจากการเคลื่อนที่ของกลไกข้อเหวี่ยง
Foto.3
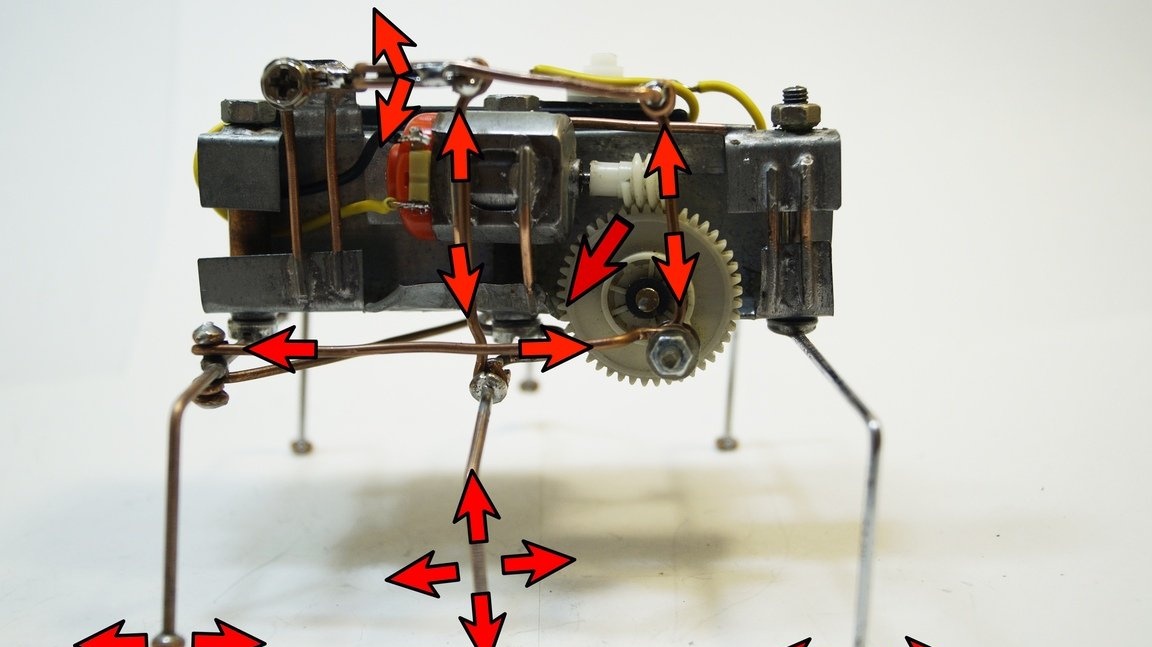
Foto.4
4. วัสดุและเครื่องมือ
1.Soldering เหล็ก 50W
2. ช่องใส่แบตเตอรี่
3.Prysoy POS-61
4. ลวดทองแดงขนาด 2.5 มม.
5. บัดกรีกรด ZnCl (สังกะสีคลอไรด์)
6. มอเตอร์ไฟฟ้า F130 5V
7. กรรไกรสำหรับโลหะ
8. หนอนไดรฟ์
9. คีม
10. ท่อเหล็กขนาดเส้นผ่าศูนย์กลาง 80 มม.
11. แบตเตอรี่แบบชาร์จไฟ 18650
12. โปรไฟล์ PPN-2 30X20
และ: (ปุ่มเพาเวอร์เทปสองด้านสายติดตั้ง)

5. คำแนะนำการประกอบ
1. สร้างกรอบแมลงสาบ
วาดมาร์กอัปในโปรไฟล์ตามที่ระบุในรูปภาพ 5
รูปภาพที่ 5
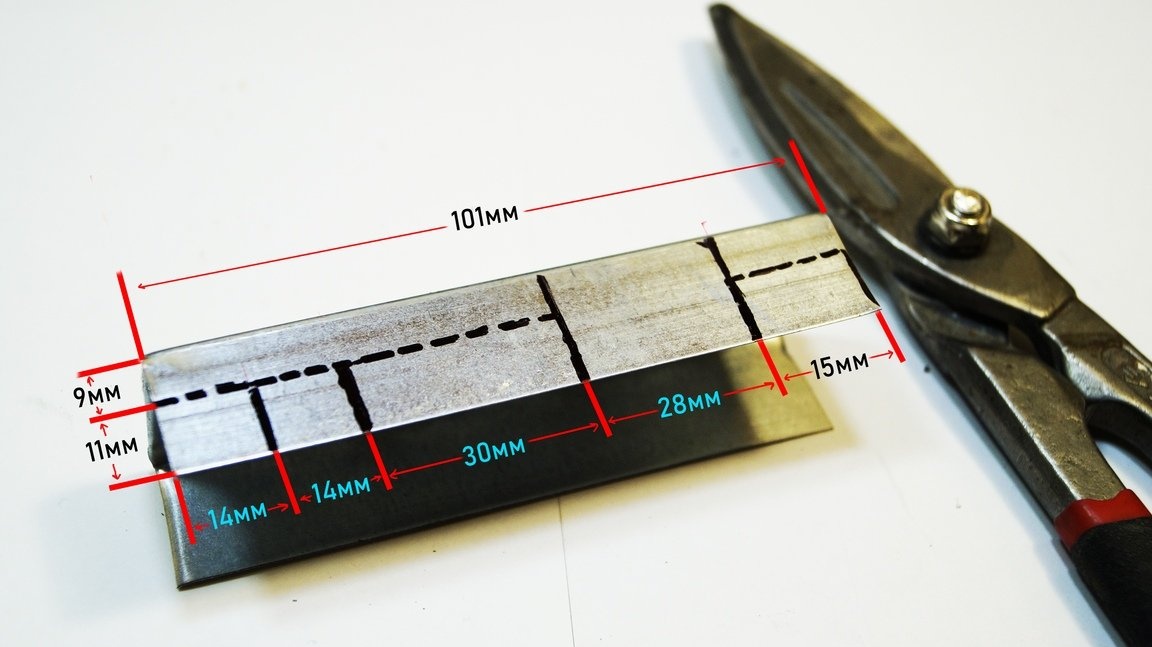
เราใช้กรรไกรสำหรับโลหะตัดและดัดชิ้นงานด้วยคีมดังแสดงในรูปที่ 6 ทำเครื่องหมายส่วนล่างตามที่ระบุในรูปที่ 6 งอโปรไฟล์ด้วยคีมตามรูปที่ 7
รูปภาพที่ 6
รูปภาพที่ 7
2. มอเตอร์ไฟฟ้าและแกนข้อเหวี่ยง
ขั้นตอนต่อไปคือการประสานมอเตอร์ไฟฟ้าเข้ากับเฟรม มอเตอร์ก่อนการบัดกรีจะต้องถอดประกอบ เราท่วมตัวเรือนมอเตอร์และกรอบด้วยหัวแร้งรูปภาพ 8
เราประสานโครงมอเตอร์ไฟฟ้าและกรอบเข้าด้วยกันทำให้ชิ้นส่วนร้อนขึ้นด้วยหัวแร้งกดให้เข้ากับรูปที่ 9 !!! ระวังรายละเอียดความร้อนมาก !!!
รูปภาพ 9
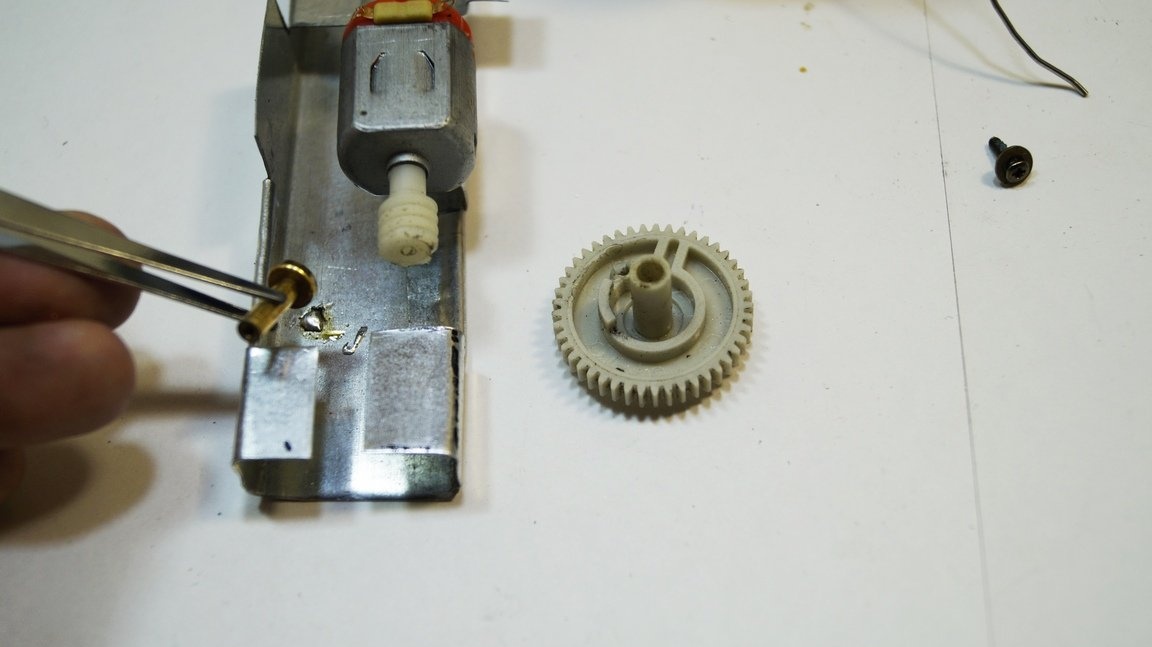
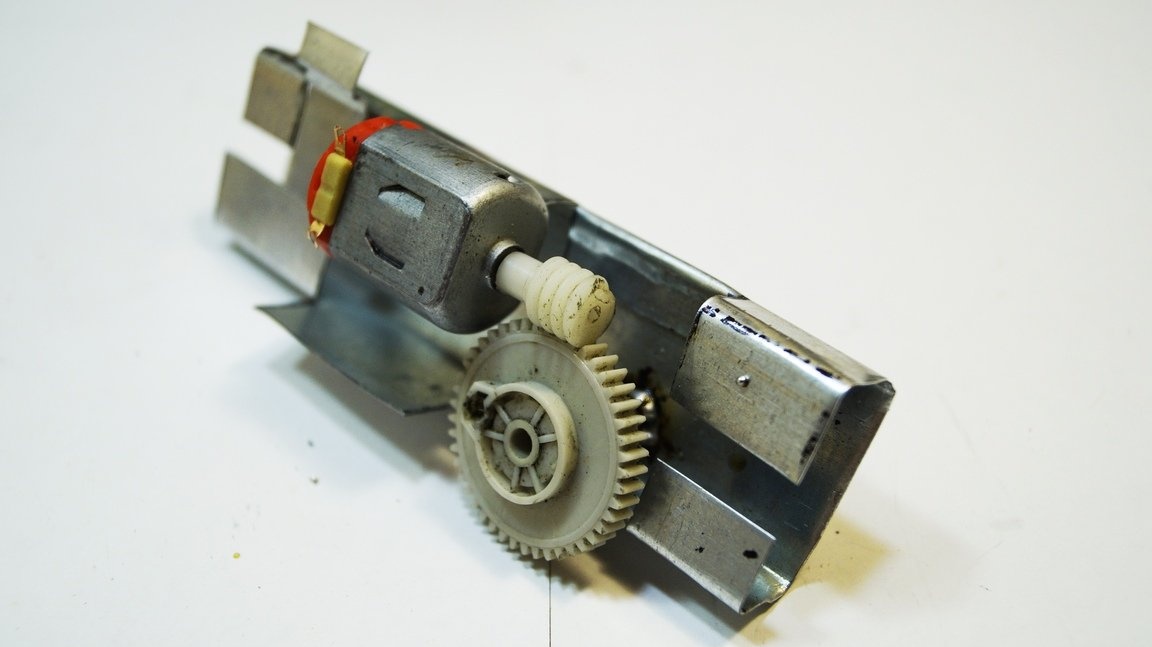
นำมอเตอร์ไฟฟ้ากลับมา เราประสานแกนข้อเหวี่ยงในตำแหน่งนี้จะทำการทดลอง ควรติดตั้งเฟืองตัวหนอนไว้พร้อมกันและไม่ควรเอียงเกียร์รูปภาพที่ 10.11
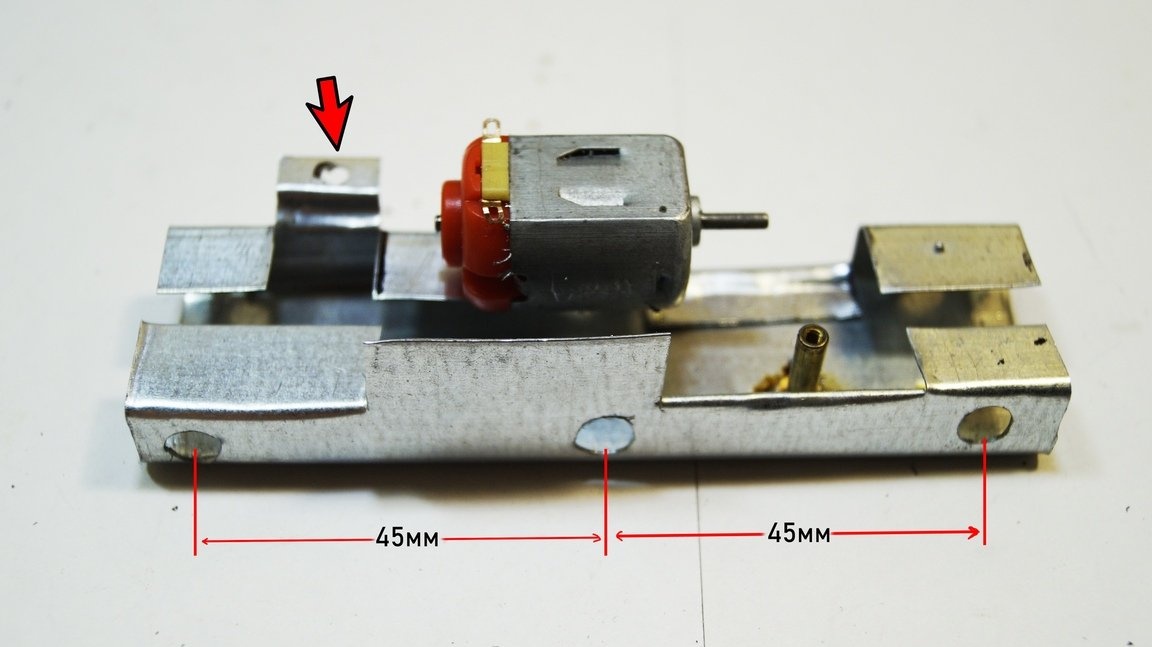
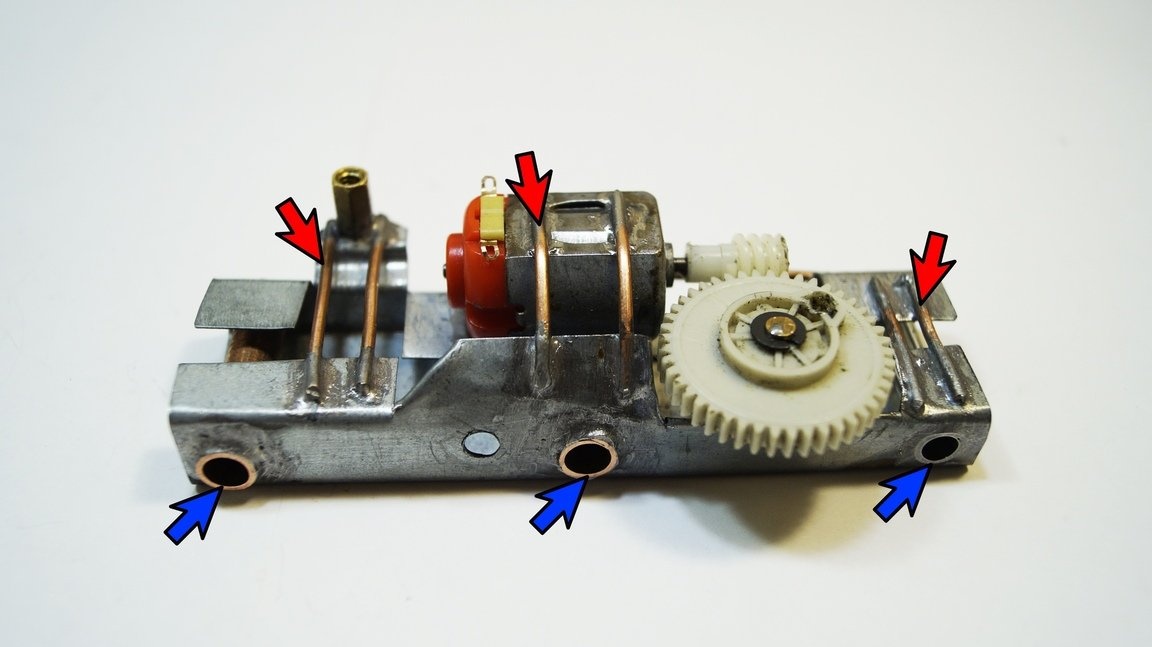
3. รูสำหรับขาของแมลงสาบ
ในการแนบอุ้งเท้าแมลงสาบเข้ากับเฟรมคุณจะต้องเจาะรูด้วยสว่านขนาด 8 มม. เราเจาะรูที่หูด้านหลังมอเตอร์ไฟฟ้าด้วยสว่าน 3.2 มม
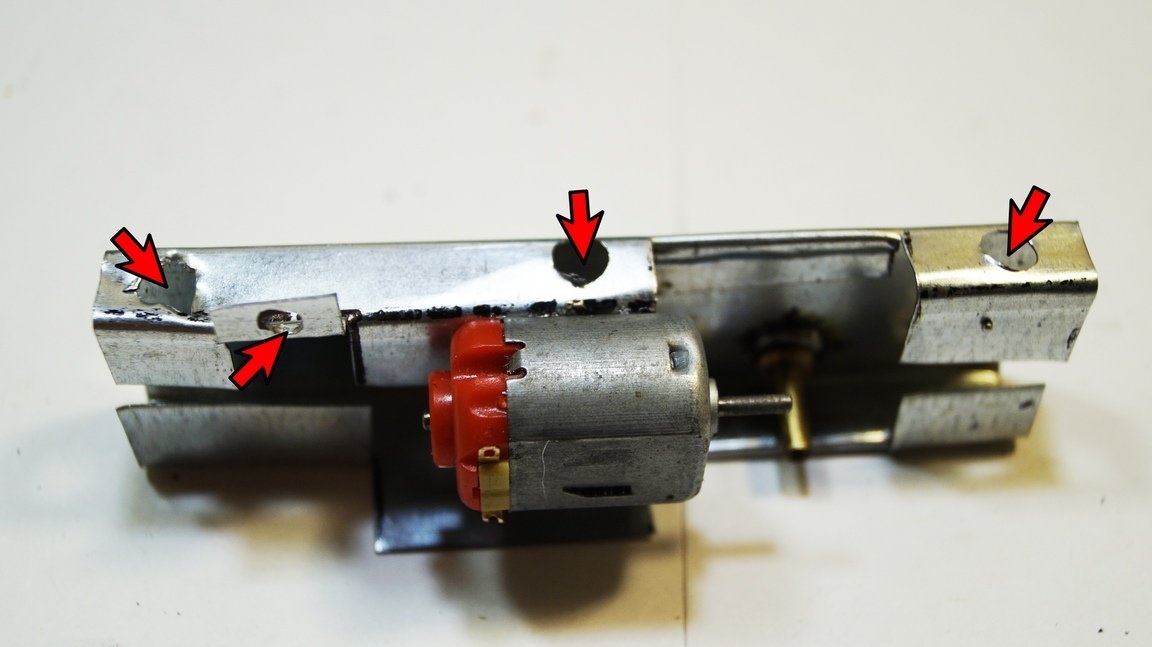
นอกจากนี้เรายังประสานน็อตในหูด้านหลังมอเตอร์ไฟฟ้า คันโยกที่รับผิดชอบในการยกอุ้งเท้ากลางตามแนวแกนจะยึดกับน็อตนี้
เพื่อเพิ่มความแข็งแกร่งให้กับการออกแบบเฟรมเครื่องบัดกรีถูกบัดกรีด้วยลวดทองแดง 2.5 มม.
บูชขนาด 8 มม. ถูกบัดกรีไปยังจุดเชื่อมต่อของอุ้งเท้าแมลงสาบรูปภาพที่ 15
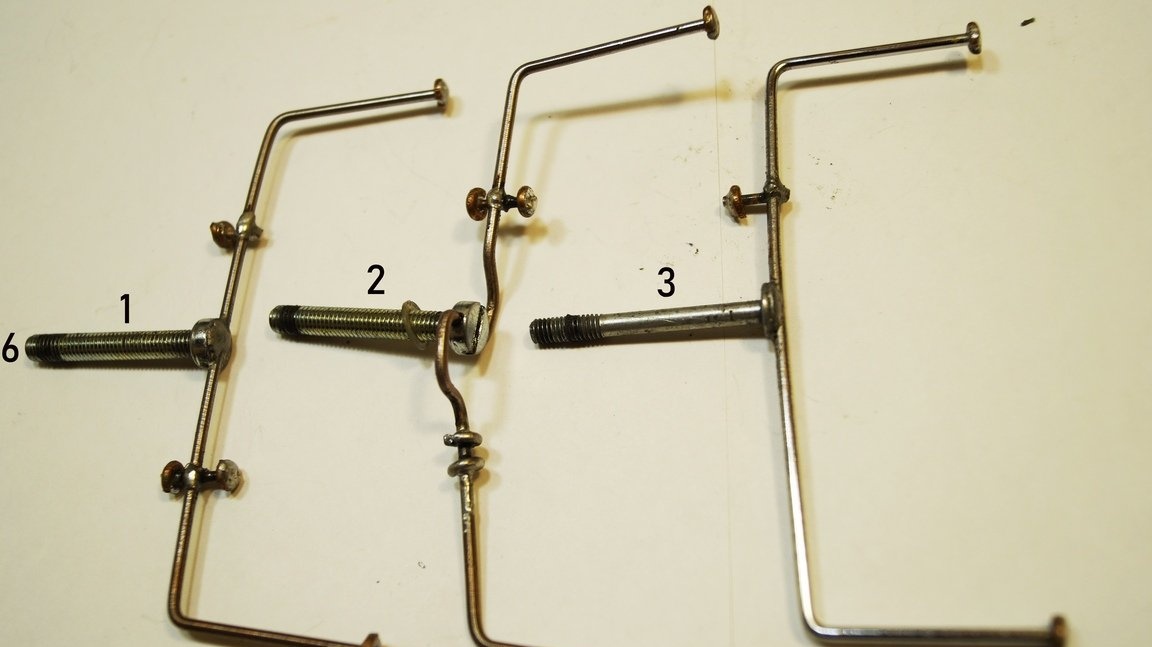
4. อุ้งเท้าของแมลงสาบ
ใช้ลวดโลหะที่มีขนาดเส้นผ่าศูนย์กลาง 3 มม. เป็นอุ้งเท้าแมลงสาบซึ่งจะถูกบัดกรีที่หัวของสายฟ้า M6 ภาพถ่าย 16 คู่กลางของกรงเล็บแมลงสาบทำแตกต่างกันเป็นรูเจาะในหัวสายฟ้าตามเส้นผ่าศูนย์กลางของลวด ลวดนั้นงอในรูปแบบของตัวอักษร“ S” ซึ่งจะทำให้ขาของแมลงสาบเคลื่อนไหวในแนวตั้งรูปภาพ 17
รูปภาพที่ 16
รูปภาพที่ 17

ในการตรึงแท่งลวดทองแดงที่มีความยาว 2.5 มม. ส่วน 12 มม. จะถูกบัดกรีด้วยอุ้งเท้าของแมลงสาบแหวนทองแดงจะถูกบัดกรีไปที่ปลาย แท่งทำจากลวดทองแดงที่มีหน้าตัดขนาด 2.5 มม. ขนาดโดยประมาณขอแนะนำให้โค้งงอลวดเพื่อให้ในอนาคตมีความเป็นไปได้ในการปรับความยาวตามรูปที่ 18
ภาพถ่าย 19 แสดงมุมมองด้านล่างโดยมีการติดตั้งอุ้งเท้าบนกรอบ
เราสร้างแรงฉุดจากกลไกข้อเหวี่ยงไปจนถึงขาหน้าของแมลงสาบ เราใช้แรงผลักดันเพื่อปิดบังความสามารถในการปรับแต่ง รัศมีการหมุน 8 มม. รูปที่ 20
เราสร้างคันโยกสำหรับการเคลื่อนย้ายอุ้งเท้ากลางในแนวตั้งจากลวดทองแดงรูปภาพ 21.22
สิ่งนี้ทำให้ส่วนทางกลของแมลงสาบเสร็จสมบูรณ์
ภาพที่ 21

รูปภาพ 22 แสดงตำแหน่งของอุ้งเท้าที่ตำแหน่งล่างของเพลาของกลไกข้อเหวี่ยง
รูปภาพที่ 22

5. ส่วนไฟฟ้า
กาวช่องใส่แบตเตอรี่บนเทปสองด้านเข้ากับกรอบแมลงสาบ กาวปุ่มเปิดปิดที่ช่องใส่แบตเตอรี่ เราประสานองค์ประกอบทั้งหมดของ Photo 23
หุ่นยนต์ - แมลงสาบพร้อม !!!