


สวัสดีตอนนี้ฉันต้องการแบ่งปันคำแนะนำในการสร้างรถถังของเล่นที่ควบคุมโดย accelerometer ของโทรศัพท์ Android ฐานของถังจะทำจากไม้อัดสีหนา 3 มม. ตัวหนอนและมอเตอร์เกียร์คู่ของ บริษัท Tamiya ที่มีชื่อเสียง ผลิตชิ้นส่วนที่มีคุณภาพและราคาไม่แพง
สำหรับรถถังที่เราต้องการ:
- Tamiya 70168 เกียร์คู่
- ชุดลูกกลิ้งและราง Tamiya 70100
- Tamiya 70157
- ไม้อัด 10 มม. (ชิ้นเล็ก)
- Arduino Pro Mini 5V AtMega 328
- DRV 8833
- โมดูลบลูทู ธ HC-06 หรือเทียบเท่า
- USB-UART สำหรับ Arduino firmware
- ไฟ LED สี่เหลี่ยมสีแดงและสีเขียว
- LED สีขาว 5 มม. 2pcs
- ตัวต้านทาน 3x 150 โอห์ม
- แบตเตอรี่ Li-ion 18650
- ตัวเชื่อมต่อ Dupont Dad-Mom
- สายไฟที่มีสีต่างกัน
- ประสาน
- ขัดสน
- หัวแร้ง
- สลักเกลียว 3x40, 3x20, ถั่วและแหวนสำหรับพวกเขา
- สกรูไม้ 2x10
- ดอกสว่านไม้ 3 มม. และ 6 มม
- เครื่องเลื่อยฉลุ
- สีอะครีลิค
ขั้นตอนที่ 1 ประกอบมอเตอร์เกียร์
ฉันชอบใช้มอเตอร์เกียร์ของ Tamiya พวกเขายืนได้รับการยอมรับประกอบได้อย่างง่ายดาย Tamiya 70168 มีสี่ตัวเลือกการสร้าง ขึ้นอยู่กับอัตราทดเกียร์ที่ต้องการและตำแหน่งของเพลาส่งออก
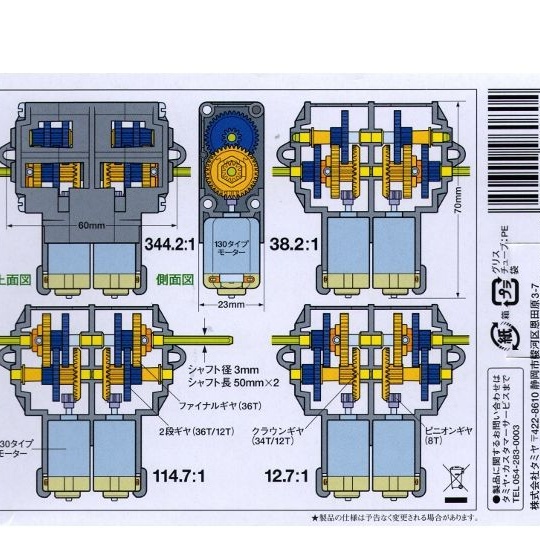
คำแนะนำโดยละเอียดอยู่ในกล่องเกียร์ เราต้องการเพลาส่งออกเพื่อให้เข้าใกล้เครื่องยนต์มากขึ้นและอัตราทดเกียร์ 114.7: 1 เราเลือกตัวเลือกที่เราต้องการและรวบรวมทุกอย่างตามคำแนะนำยกเว้นสำหรับการติดตั้งมอเตอร์ สะดวกกว่าที่จะนำมอเตอร์มาใช้ภายหลังนอกจากนี้จะต้องทำการบัดกรีสายไฟและตัวเก็บประจุก่อนที่จะทำการติดตั้ง
ขั้นตอนที่ 2 ผลิตชิ้นส่วนร่างกาย
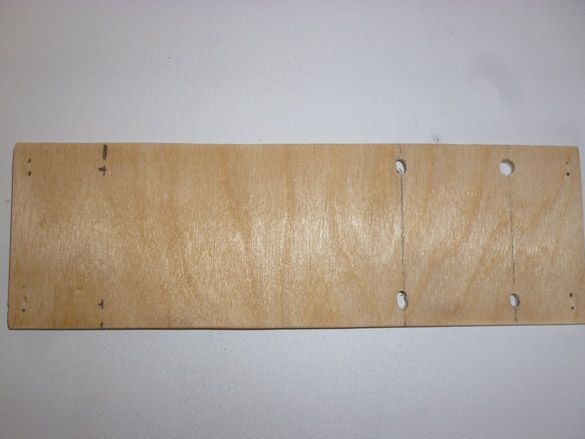
ตัวกล่องทำจากไม้อัดหนา 3 มม. ดาวน์โหลดภาพต่อไปนี้และพิมพ์ลงบนกระดาษ A4 ในระดับ 102%
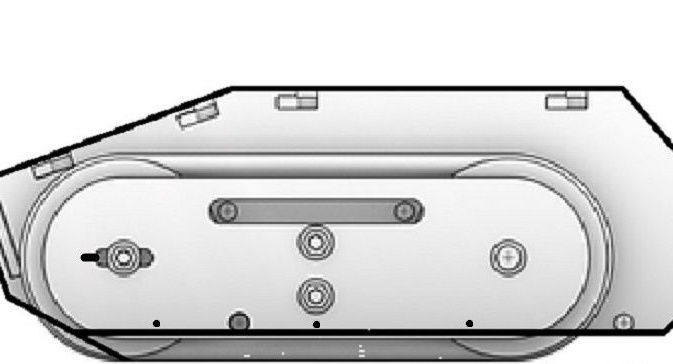
ตอนนี้เราเอาไม้อัดสองชิ้นที่มีขนาดเพียงพอใส่ลงบนอีกอันใช้รูปภาพของเราที่ด้านบน ควรทำรู 3 มม. ในพื้นที่ที่มีเครื่องหมายตัวหนา เพื่อให้ทั้งสองส่วนเหมือนกันก่อนอื่นเราเจาะแผ่นและไม้อัดสองอันที่จุดใดจุดหนึ่งใส่สลักที่นั่นแล้วบิดภาพและไม้อัดสองชิ้นเข้าด้วยกัน จากนั้นหลุมที่สองและยังใส่สายฟ้าที่นั่น หลังจากนั้นเราเจาะที่เหลือทั้งหมด ให้ความสนใจกับรูซ้ายสุดมันเป็นสิ่งจำเป็นที่จะทำให้มันเป็นรูปไข่ นี่เป็นสิ่งจำเป็นในการควบคุมความตึงของราง ตอนนี้เราใช้จิ๊กซอว์และตัดส่วนสองส่วนออกจากกล่องทันทีตามด้วยตัวหนาของรูปภาพ รายละเอียดสองอย่างนี้น่าจะเป็น:
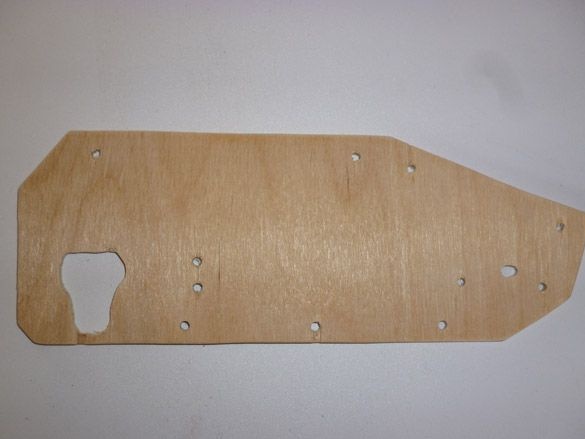
ต่อไปคุณต้องทำตามขั้นตอนทั้งหมดข้างต้นเพียงครั้งนี้เราตัดรายละเอียดสองอย่างที่ครอบคลุมแทร็ก จำเป็นต้องตัดรูปวงรีเล็ก ๆ ที่วาดในรูปภาพ ด้วยเหตุนี้เราจึงได้รับรายละเอียดเพิ่มเติมสองประการ:
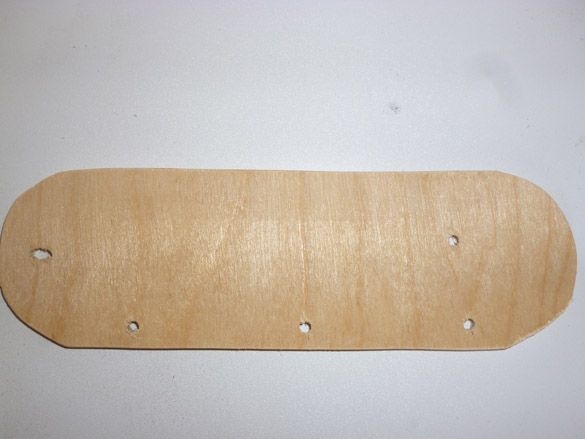
ตอนนี้เราเอาแผ่นไม้อัดในชั้นเดียวแล้วตัดสี่เหลี่ยมผืนผ้าที่มีขนาด 168 x 54 มม. นี่คือด้านล่างของถังของเราและส่วนที่ติดมอเตอร์เกียร์:
ในการเริ่มต้นการชุมนุมเราต้องการรายละเอียดทั้งหมดที่อธิบายไว้ข้างต้น:

คุณสามารถทิ้งรายละเอียดทั้งหมดไว้ได้ แต่ฉันชอบที่จะทาสี สีอะครีลิคเหมาะสำหรับการทาสี มันแห้งเร็วและไม่มีกลิ่นซึ่งหมายความว่าคุณสามารถทาสีในห้องใดก็ได้โดยไม่ต้องกลัวพิษ ดังนั้นเราจะทาสีรายละเอียดการตัดออก:

ตอนนี้เราต้องการไม้อัด 10 มม. หรือไม้ที่เหมาะสม จำเป็นต้องตัดสี่เหลี่ยมที่มีขนาด 54 x 15 มม. และความหนา 10 มม. ส่วนนี้จำเป็นต้องเชื่อมต่อตัวเรือนเข้าด้วยกัน เมื่อทำสี่เหลี่ยมผืนผ้าเราเจาะสองรูที่ระยะ 15 มม. จากขอบโดยเริ่มด้วยการเจาะ 3 มม. และ 6 มม. แต่ไม่เจาะทะลุ แต่ผ่านความลึกเพียงครึ่งเดียว ใส่น็อตเข้าไปในรูที่ได้รับและยึดด้วยกาว เราต้องการรายละเอียดสี่อย่างดังต่อไปนี้:

อีกครั้งเราใช้ไม้อัดหนา 3 มม. ตัดมุมฉาก 107 x 60 มม. ถอยกลับ 15 มม. จากขอบของรูเจาะ 3 มม. นี่จะเป็นฝาปิดด้านบน:

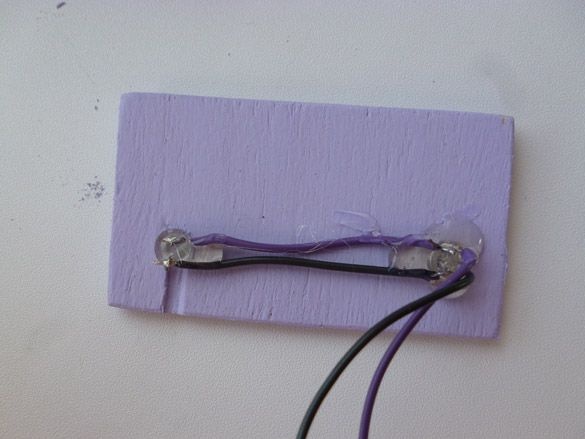
เราตัดสี่เหลี่ยมถัดไปขนาด 33x60 มม. สำรอง 15 มม. จากขอบเราเจาะสองรูที่มีเส้นผ่าศูนย์กลาง 5 มม. การตัดและปอกชิ้นส่วนที่เราวาดมัน จากนั้นเราใส่ไฟ LED สีขาวขนาด 5 มิลลิเมตรเข้าไปในรูที่ทำ เราประสานพวกเขาในแบบคู่ขนานและแก้ไขโดยใช้กาวร้อนละลาย:
ขั้นตอนที่ 3 การประกอบตัวเรือน
เมื่อเตรียมมอเตอร์เกียร์และชิ้นส่วนแล้วเราจะดำเนินการประกอบทุกอย่างด้วยกัน ในการเริ่มต้นใช้ส่วนล่างของเคสและติดตั้งมอเตอร์เกียร์:
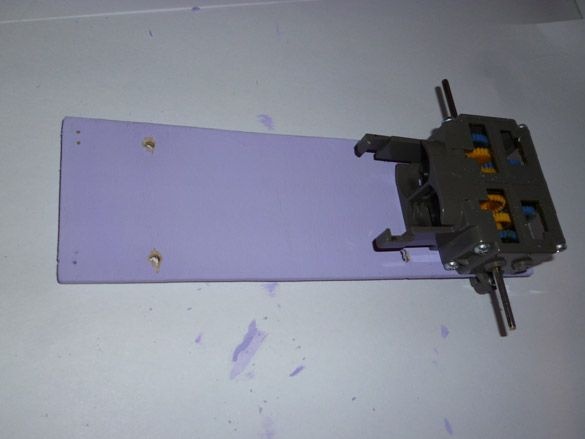
และใหญ่กว่าเล็กน้อย:

จากนั้นเราจะแก้ไขส่วนด้านข้างโดยใช้มุมจากตัวสร้างเหล็กสำหรับเด็กและสลักเกลียวขนาด 3x20 มม. สำหรับสิ่งนี้:

ตอนนี้เราต้องติดตั้งแทร็ก เรานำรายละเอียดของแทร็กปิด เราสอดสลักเกลียวขนาด 3x40 มม. เข้าไปในรู เราใส่ล้อใหญ่ไว้ที่สลักเกลียวด้านหน้าที่ล้อหลังเล็ก ๆ สามอันจากนั้นแหวนและขันน็อตให้แน่น แต่ไม่แน่นเพื่อให้ลูกกลิ้งทั้งหมดหมุนได้อย่างอิสระ เราใส่เฟืองขนาดใหญ่บนเพลาของชุดเกียร์ เรารวมสลักเกลียวทั้งหมดกับลูกกลิ้งกับรูที่ชิ้นส่วนด้านข้าง หลังจากผ่านสลักเกลียวเราก็คลายเกลียวและขันน็อตจากด้านในของกล่อง เราใส่แทร็คตรวจสอบว่าพวกเขาแน่นพอ ตัวหนอนไม่ควรลดลง แต่ความตึงเครียดที่มากเกินไปจะทำให้พวกมันเสียหาย การปรับจะดำเนินการโดยล้อหน้าเคลื่อนที่หรือหมุนกลับออกจากมอเตอร์เกียร์ หลังจากกิจวัตรทั้งหมดเราได้รับ:

เรานำมอเตอร์ที่มาพร้อมกับลูกกลิ้งและรางรถไฟ เราประสานกับแผ่นสัมผัสของเส้นลวดและในขณะเดียวกันก็มีตัวเก็บประจุ 0.1 microfarad หลังจากนั้นติดตั้งมอเตอร์ในมอเตอร์เกียร์:

เราไปยังแบตเตอรี่กันเถอะ เราประสานแบตเตอรี่ Li-ion 18650 ของเราพร้อมกันและส่งออกสายไฟเพื่อความสะดวก บิดด้วยเทปไฟฟ้า:

เราวางมันไว้ที่ด้านล่างของกล่องถัดจากมอเตอร์:

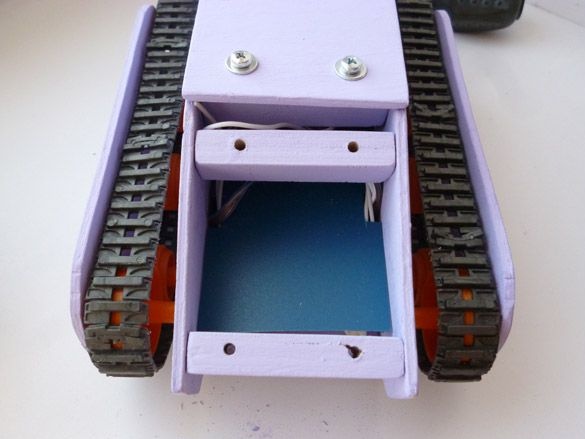
เพื่อความสะดวกรวมถึงการแยกกลไกและ อิเล็กทรอนิกส์ ตัดชิ้นส่วนสี่เหลี่ยมขนาด 100 คูณ 54 มม. จากพลาสติกบาง ๆ หรือกระดาษแข็ง วางไว้ที่ด้านบนของ gearmotor และแบตเตอรี่:
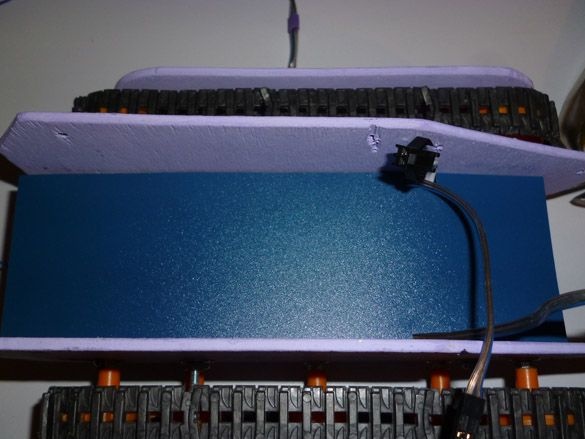
เราใช้ตัวยึดและติดตั้งตามที่แสดงในรูปภาพ เรายึดกับส่วนด้านข้างโดยใช้สกรู:
ที่ด้านหลังของรถถังเราต่อหลอด LED สี่เหลี่ยมกับกาวร้อน แดงและเขียว:

ฉันยังใช้กาวร้อนเพื่อยึดส่วนหน้าด้วยไฟหน้า:

ขั้นตอนที่ 4 ไฟฟ้า
มอเตอร์ไฟฟ้ารบกวนการทำงานของพวกเขาและเกิดแรงดันไฟฟ้าตกระหว่างการสตาร์ทเครื่อง ดังนั้นในแต่ละสตาร์ทของเครื่องยนต์ Arduino จะไม่ทำงานหนักเกินไปเราจะแบ่งการจ่ายไฟ Arduino นั้นใช้พลังงานจากแบตเตอรี่ขนาด 9 โวลต์และใช้มอเตอร์จากแบตเตอรี่ เราได้วางแบตเตอรี่ไว้แล้วเราจะวางเม็ดมะยมไว้ด้านหน้าถัง:

หลังจากติดตั้งแบตเตอรี่แล้วให้ปิดด้วยฝาครอบด้านบน:

เราเชื่อมต่อทุกอย่างเข้าด้วยกันตามรูปแบบ:

ฉันจะอธิบายเล็กน้อย มอเตอร์ด้านซ้ายผ่านคนขับเชื่อมต่อกับ 5 และ 6 พิน ขวา - ถึง 9 และ 10 บวกจาก LED สีแดงผ่านตัวต้านทานถึง 3 พินลบถึง GND บวกจาก LED สีเขียวรวมถึงตัวต้านทานถึง 4 พิน ไฟหน้าถึง 2 ขา
การทำงานของโมดูล Bluetooth นั้นดำเนินการผ่าน SoftwareSerial libraryเราจะใช้ซอฟต์แวร์ com-port รายชื่อการเชื่อมต่อสามารถเปลี่ยนแปลงได้ในร่าง เราเชื่อมต่อโมดูลดังต่อไปนี้:
Arduino Pro Mini - บลูทู ธ
D7 - RX
D8 - TX
5V - VCC
GND –GND
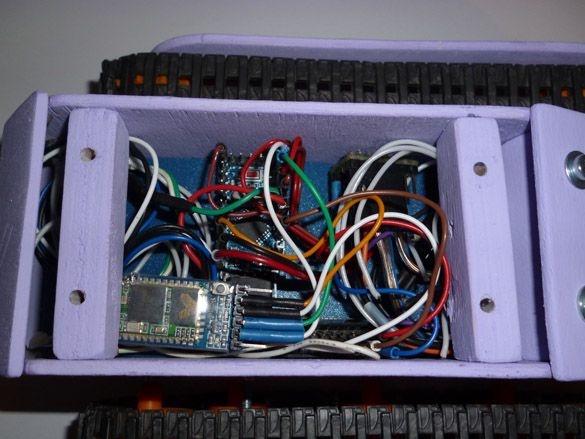
เรารวบรวมช่างไฟฟ้าไว้ในส่วนกลาง:
ขั้นตอนที่ 5 ซอฟต์แวร์
ในการทำงานกับร่างคุณจำเป็นต้องดาวน์โหลด Arduino IDE เราดำเนินการต่อและดาวน์โหลดเวอร์ชันล่าสุด:
จากนั้นคุณต้องเพิ่มห้องสมุด SoftwareSerial ควรอยู่ใน Arduino IDE อยู่แล้ว แต่ในกรณีฉันจะโพสต์:
หาก Arduino IDE เมื่อรวบรวมภาพร่างให้ข้อผิดพลาดและสาบานที่ห้องสมุดที่หายไปให้คลายไฟล์ที่เก็บถาวรที่ดาวน์โหลดมาลงในโฟลเดอร์“ libraries” ที่อยู่ในโฟลเดอร์ที่ติดตั้ง Arduino IDE ไว้
ขั้นตอนที่ 6 เตรียมโมดูล Bluetooth
การตั้งค่าเริ่มต้นของโมดูล Bluetooth นั้นแตกต่างจากที่เราต้องการ ดังนั้นก่อนอื่นคุณต้องสร้างการเชื่อมต่อของโมดูล Bluetooth กับคอมพิวเตอร์และเปลี่ยนการตั้งค่า กรอกข้อมูลร่าง Send_ AT_Bluetooth ใน Arduino:
Arduino จะทำหน้าที่เป็นลิงค์ระหว่างบลูทู ธ และคอมพิวเตอร์ เปิด Arduino IDE เปิด Port Monitor สำหรับ HC-06 เลือก 9600 ในการตั้งค่ามอนิเตอร์พอร์ตไม่จำเป็นต้องใช้ NL และ CR หากไม่ได้สร้างการเชื่อมต่อบลูทู ธ กับโมดูลแสดงว่าอยู่ในโหมดอินพุตคำสั่ง AT บางทีครั้งแรกที่โมดูลจะไม่ตอบสนอง จากนั้นลองใช้งานเกินพิกัดโดยยกเลิกการเชื่อมต่อและเชื่อมต่อสายบวก คำสั่งทั้งหมดจะถูกป้อนโดยไม่มีเครื่องหมายคำพูดอย่าลืมกด Enter เพื่อส่ง เราป้อนคำสั่งต่อไปนี้:
"AT" - โดยไม่มีเครื่องหมายคำตอบ "OK" ควรมา
“ AT + NAME
“ AT + BAUD7” - ตั้งค่าความเร็วเป็น 57600
“ AT + RESET” - เราโหลดโมดูลมากเกินไป
หากมีข้อผิดพลาดหรือไม่จำการตั้งค่า:
“ AT + ORGL” - กลับไปที่การตั้งค่าจากโรงงาน
ขั้นตอนที่ 7 เติมร่าง
หลังจากตั้งค่าโมดูล Bluetooth แล้วให้ดำเนินการต่อเพื่อกรอกข้อมูลร่างหลัก:
ขั้นตอนที่ 8 เตรียมโทรศัพท์ Android ของคุณ
ก่อนการใช้งานตรวจสอบให้แน่ใจว่าโทรศัพท์หรือแท็บเล็ต Android ของคุณมีมาตรความเร่ง ในการเริ่มต้นให้เพิ่มอุปกรณ์บลูทู ธ tanchka ใน Android เราไปที่การตั้งค่าบลูทู ธ ค้นหาโมดูลบลูทู ธ ที่คุณตั้งชื่อและเชื่อมต่อ รหัสผ่านสำหรับการเชื่อมต่อคือ "1234" หรือ "0000" มันอาจแตกต่างกันสำหรับรุ่นที่แตกต่างกัน ตอนนี้ติดตั้งโปรแกรมควบคุม เราจะต้องมี Arduino Bluetooth RC Car หรือ BT Controller ทั้งสองโปรแกรมนั้นฟรีพวกเขามีความสามารถในการควบคุมอุปกรณ์ Bk Bluetooth ผ่านมาตรความเร่งและอยู่ใน Google play ดาวน์โหลดโปรแกรมที่คุณชอบบนโทรศัพท์หรือแท็บเล็ต ในเมนูการตั้งค่าโปรแกรมให้ป้อนคำสั่งต่อไปนี้:
W - ไปข้างหน้า
กลับ -
A - ไปทางซ้าย
D - ถูกต้อง
F หรือ G– หยุด
K - ไฟหน้า
L - ปิดไฟหน้า
คุณสามารถใช้จอยสติกเพื่อควบคุมรถถัง มันสามารถทำตามอื่น ๆ ของฉัน คำแนะนำ.
และเพิ่มโมดูลบลูทู ธ เข้ากับมันตามมาอีกอัน คำแนะนำ.

